The BCM4778’s third-generation dual-frequency GNSS receiver features advanced multipath mitigation, L5 acquisition capability, LTE filtering and jamming protection
Broadcom Inc. has launched the BCM4778, its lowest power L1/L5 GNSS receiver chip optimized for mobile and wearable applications. Equipped with the latest GNSS innovations, the third-generation chip is 35% smaller and consumes five times less power than the previous generation.
Broadcom will be presenting further information on the chip in the Session B5, Panel: GNSS Chipset Technology – Trends, Opportunities and Challenges panel at the ION GNSS+ 2021 on Sept. 24.
Dual-frequency GNSS continues to be an important location feature for modern mobile and wearable devices, providing greater positioning accuracy for location-based applications. The advanced L5 signal enables sidewalk-level accuracy for pedestrian navigation in urban environments, as well as lane-level accuracy for vehicle navigation.
Reduction in GNSS power consumption is crucial to extending the battery life of a mobile or wearable device. Compared to GNSS receivers used in integrated platforms, Broadcom’s single-chip BCM4778 delivers significantly lower power consumption and higher performance while offering more advanced GNSS features, such as the next-generation Grid Tracking urban multipath mitigation technology.
“We are excited to see this impressive power reduction, combined with the L5 Grid Tracking technology in the new Broadcom GNSS chip. This will increase the impact of Google’s 3DMA ray-tracing for urban multipath mitigation,” said Frank van Diggelen, principal software engineer at Google.
Longer battery life. The BCM4778 increases the GNSS always-on battery life on a smartwatch by 30 hours compared to the previous generation chip operating on a 300-mAh battery. The extended battery life helps drive new experiences in smartwatches and phones, including keeping the GNSS always-on for fitness applications for multiple days on a single battery charge.
In addition, the BCM4778 features fully integrated LNAs for L1 and L5 bands, which reduces RF front-end BOM costs and footprint requirements, suitable for space-constrained applications. The chip offers increased flexibility to smartwatch and phone designers with its small size. Having the ability to place the BCM4778 closer to the antenna helps improve signal reception and enhances overall GNSS performance.
The BCM4778 dual-frequency chip is designed for small mobile and wearables. (Photo: Broadcom)
Product Highlights
7nm CMOS technology
Typical power consumption
4mW L1 band only
6mW L1+L5 simultaneous
FCBGA package
New Grid Tracking technology
Advanced multipath mitigation
Continuously tracks the full L5 channel
Capable of L5 acquisition
Increased processing capability and throughput
Advanced LTE filtering and jamming mitigation
Enhanced LTE Band 13 and Band 14 filtering
Spoofing and jamming detector
Jamming mitigation through multiband and multi constellation
Reduced BOM cost and footprint
Flexibility in using internal LNAs
Optional operation without interstage SAW filters
Integrated switching regulator with direct connect to battery
“With the launch of this third generation dual-frequency GNSS receiver chip, Broadcom continues the tradition of raising the bar for mobile GNSS,” said Vijay Nagarajan, vice president of marketing for the Wireless Communications and Connectivity Division at Broadcom. “Always-on dual frequency GNSS is a key request from mobile and wearable OEMs, and we are thrilled to deliver it.”
“Consumer electronic companies have been faced with the challenge of managing power consumption versus performance, often having to choose one over the other. Broadcom’s innovative approach to the BCM4778 allows their customers to realize improvements on both fronts,” said Ramon T. Llamas, research director for mobile devices at IDC. “The result: device manufacturers can enable new experiences and run applications over a sustained period of time. In addition, by reducing its BOM cost and its physical footprint, Broadcom is enabling further benefits from cost savings and design configurability.”
Broadcom is currently sampling the BCM4778 to its early access partners and customers. Please contact your local Broadcom sales representative for samples and pricing.
The LC29D is a sub-meter level GNSS module that integrates dead reckoning (DR) and multi-band (L1/L5) real-time kinematic (RTK) algorithm technologies with fast convergence times and reliable performance. The module supports dual-band GNSS raw data output and integrates 6-axis IMU sensor to deliver high-accuracy positioning performance in seconds.
Based on the Broadcom BCM47758 GNSS chip, the LC29D can concurrently receive signals from up to six constellations (GPS, GLONASS, Galileo, IRNSS, BeiDou and QZSS) at any given time, which maximizes the availability of sub-meter level accuracy.
Combining GNSS signals from dual-frequency bands (L1/L5) and RTK technology enables the LC29D to achieve high performance even in difficult conditions such as dense urban canyons. The module can also mitigate multipath effects in urban cities.
The LC29D offers a position update rate of up to 30Hz (fusion output), enabling dynamic applications like shared eMobility, delivery robots and precision agriculture to receive position information with lower latency. By enabling easy integration of advanced RTK multi-band algorithms, the module helps developers quickly bring their devices to market.
The high-precision module offers better performance than products in the market in positioning precision, sensitivity, time to first fix (TTFF), update rates and latency.
Embedded with 6-axis MEMS sensor, devices powered by the LC29D can quickly report motion, which enables consistent high-precision positioning capabilities when combined with the DR algorithm, even in weak-signal environments such as tunnels and underground parking structures.
BCM4776 chip utilizes 30 new L5 signals to deliver higher navigational accuracy and yield
Photo: Broadcom
Broadcom introduced in 2017 the first mass-market implementation of dual frequency: BCM4775. This chip makes use not only of the classic L1 frequency broadcast by every satellite, but also of the more advanced L5 signal broadcast by a subset of the satellites.
The use of this enhanced L5 signal improves the accuracy of GNSS in an urban scenario, as it mitigates the main source of error: the reflections in the nearby buildings, also known as multipath. It also improves GNSS in an open-sky scenario, allowing submeter accuracy, a previously unmet performance bar in smartphones until now. Ever since, the BCM4775 has been adopted in flagship smartphones, smartwatches and fitness devices.
Given the unabated need for better precision and accuracy, Broadcom has introduced its second-generation dual-frequency GNSS solution — the BCM4776.
The new chip is capable of using the new BeiDou-3 constellation’s B2a signals (the Chinese indicator for L5). It will be able to track 30 new L5 signals (60 percent more) with a significant impact on accuracy. End users will experience much higher reliability of the submeter accuracy inherent to dual-frequency L1-L5.
Image: Broadcom
Second generation dual-frequency GNSS will be used for innovative lane-level driving navigation instructions, allowing driving applications to know which highway lane the vehicle is in. Expect instructions like “move one lane to the right so you don’t miss your next highway exit” or “move one lane to the left to take the pool lane and save 10 minutes.”
OriginGPS has collaborated with Broadcom to create a new miniature module with L1 + L5 support provided by the BCM47758 chip, enabling ultra-accurate GNSS positioning. The module was developed for solutions requiring super-precision GNSS and a dual-frequency combination.
Photo: OriginGPS
The ORG4600-B01 is OriginGPS’ first dual-frequency GNSS module. The module enables customers to build solutions with sub-1-meter accuracy without implementing external components.
Measuring 10 x 10 mm, the ORG4600-B01 module supports L1 + L5 GNSS reception with one RF port, enabling the use of a low-cost, dual-band antenna delivering sub-1-meter accuracy performance in real-world operating conditions.
Alternate Build. An alternate build option allows for separate L1/L5 RF outputs when dual antennas are required. The ORG4600-B01 is suitable for solutions requiring ultra-accurate positioning, such as telematics, the Internet of Things (IoT) and auto OBD applications.
“This year has seen several satellites launched into orbit every month, most of them fitted with L5/E5 capabilities, and the Chinese and European Union governments plan to have their satellite constellations fully operational by 2020.” said Haim Goldberger, CEO of OriginGPS.
Developing the ORG4600-B01 module with the BCM47758 GNSS receiver chip by Broadcom Inc. was the fastest and surest way to add a high-quality dual-frequency module to our portfolio and meet our customers’ increasing requirements for ultra-accurate GNSS modules,” Goldberger said.
“Size is a crucial parameter in GNSS dual-frequency solutions,” said Prasan Pai, product marketing director for the Wireless Communications and Connectivity Division at Broadcom. “The collaboration with OriginGPS has created the industry’s smallest dual-frequency module with ‘no compromise’ quality. For our customers seeking an ultra-accurate GNSS solution in a compact form factor, the ORG4600-B01 fits the bill. The collaboration enables Broadcom to reach new markets, such as precision agriculture, security, children tracking and fleet management.”
“OriginGPS is interested in additional partnerships to enable bringing advanced solutions to market quickly,” said Haim Goldberger, CEO of OriginGPS.
OriginGPS is presenting its products with real-life demonstrations at MWC 2019, Los Angeles, Oct 22-24, Booth S2938.
Following a waiver by the U.S. Federal Communications Commission (FCC) of its rules in November 2018, in which it allowed devices in the United States to access signals transmitted by the Galileo Global Navigation System, leading U.S. manufacturers are preparing to roll-out Galileo on U.S. territory.
At a meeting on Nov. 15 last year, the US FCC granted in part a request from the European Commission for a waiver of the FCC rules so that devices in the United States may access specific signals transmitted by Galileo.
This decision means that consumers and industry in the U.S. are now able to access certain satellite signals from the Galileo system, which can be used in combination with the U.S. Global Positioning System (GPS). The improved availability, reliability, and resiliency offered by incorporating Galileo capability into devices is something that U.S. chip manufacturers are eager to pass on to their customers.
“This is an important market development opportunity for manufacturers in the U.S. The FCC ruling means that industry can now benefit from the use of Galileo signals. The added accuracy and robustness offered by multi-constellation and multi-frequency capability will be a key differentiator on the market,” said Carlo des Dorides, Executive Director of the European GNSS Agency (GSA).
“We are glad to see FCC supporting Broadcom’s dual frequency GNSS vision, for which the GPS and Galileo combination is key,” said Vijay Nagarajan, VP Marketing Wireless Connectivity and Communication Division at Broadcom. “We enabled the world’s first dual frequency GNSS phone in 2018 with the simple goal of providing accurate location to the consumer even amidst the skyscrapers in a busy downtown. We are certain that consumers will benefit from this FCC ruling that will further drive the adoption of dual frequency GNSS.”
“As a leader in developing cellular technology — today, as the world launches 5G and dating back to Qualcomm’s legacy in 4G, 3G and 2G — including work to incorporate robust navigation solutions for smartphones, Qualcomm Technologies integrated Galileo across its chipset portfolio because we understand the importance and benefits of accurate, reliable, and rapid position location for consumers,” said Dean Brenner, senior vice president of Spectrum Strategy and Tech Policy, Qualcomm Incorporated. “We’re excited about the FCC allowing access to Galileo signals in the U.S. for commercial Location Based Services because it is a big step forward in improving the user experience, particularly in dense urban environments.”
Activating Galileo in the U.S.
Both Broadcom and Qualcomm Technologies, Inc. already have dual-frequency solutions that support Galileo E1/E5a signals: the world’s first dual frequency GNSS smartphone, the Xiaomi Mi-8, was fitted with a Broadcom BCM47755 chip and, in December, Qualcomm Technologies launched the newest generation in its 8 Mobile Platform Series, the dual-frequency Qualcomm Snapdragon 855 Mobile Platform.
“Approximately 100 smartphone models are already fitted with chipsets from these two manufacturers. Following the FCC ruling, we are expecting to see a significant increase in Galileo users coming from the U.S.,” said Justyna Redelkiewicz Musial, in charge of LBS and IoT market development at the GSA.
Better positioning and navigation
The FCC ruling permits access to two Galileo signals — the E1 signal that is transmitted in the 1559-1591 MHz portion of the 1559-1610 MHz Radio-navigation-Satellite Service (RNSS) frequency band and the E5 signal that is transmitted in the 1164-1219 MHz portion of the 1164-1215 MHz and 1215-1240 MHz RNSS bands.
Access to multi-constellation and multi-frequency capability means that users in the U.S. will be able to benefit from a better positioning and navigation experience particularly in urban environments where the unique shape of the E5/L5 signal makes it easier to distinguish real signals from the ones reflected by buildings, reducing the multipath effect. The simultaneous use of E5/L5 frequencies also mitigates other sources of error, such as ionospheric distortions, and makes the signal more robust against interference and jamming.
By Paolo Crosta, Paolo Zoccarato, Rafael Lucas and Gerarda De Pasquale, European Space Agency
Test set-up. (Image: Authors)
Most mass-market manufacturers have already developed a dual-frequency chip or will soon do so. What is still not completely clear is the main benefit of adding the second frequency. Is it beneficial just for correcting ionospheric error?
Will it provide an improvement of the ranging error thanks to the wideband nature of the signal broadcast on the second frequency and their multipath rejection capabilities? Is it improving the measurement quality by means of a higher transmitting power?
Could it be exploited as a source of data for the provision of accurate orbit and clock corrections? What is the best PVT algorithm to apply to a multi-constellation dual-frequency mass-market chip?
To answer these questions, an evaluation kit of the Broadcom chip BCM4775 has been tested — the first dual-frequency mass-market chip commercially available.
Results show:
the code noise (multipath) is often the main source of error, hiding the benefits of more accurate clocks and orbital data.
wide-band signals are very beneficial for multipath rejection. Position fix based on E5a-L5-only measurements even with fewer satellites can outperform L1-E1-only in tests performed this September (impact of the new Galileo satellites).
after deactivation of the duty-cycle tracking on Android phones, the carrier phase measurements are improved and we do not experience any longer filter resets in the position Kalman filter.
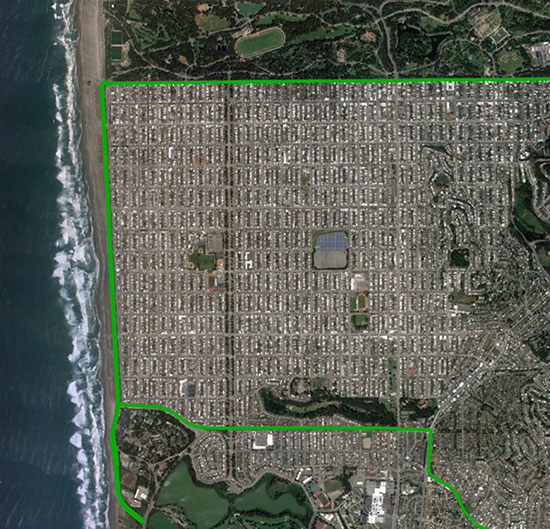
The mixed urban environment in San Francisco, where Starling + the TeseoAPP was tested and data collected and processed in real time. (Image: Swift Navigation)
The Starling modular and portable GNSS high-precision positioning engine leverages Swift’s Skylark Cloud Corrections Service. An advanced GNSS processing engine, Starling enhances measurements from commercially available GNSS receivers to provide true precision and integrity capabilities, the company said.
Starling is GNSS-receiver agnostic and works with a variety of automotive grade GNSS chipsets and inertial sensors, offering automotive companies choices in selecting the best components for their autonomous sensor suite, vehicle-to-vehicle (V2V) applications and automated driving systems.
In a test drive in California, Swift showcased the integration of Starling onto ST’s Telemaco3P MPU-based modular telematics platform with on-board TeseoAPP, confirming the accuracy of the combined solution as a compelling offering for safety-critical autonomous-vehicle positioning when ST makes production TeseoAPP chipsets available in 2019.
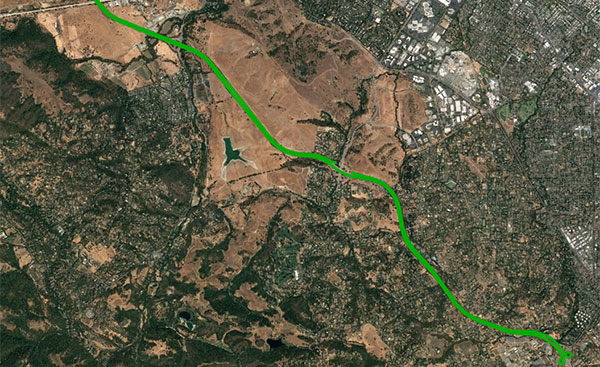
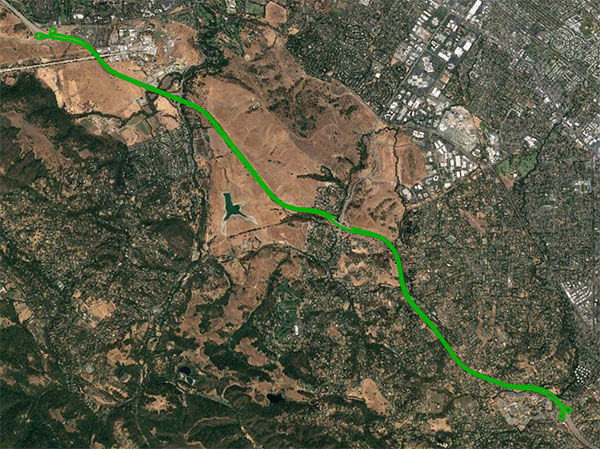
An open-sky freeway environment on Interstate 280 in California where Starling + the BCM47755 were tested and data collected and processed in real time. (Image: Swift Navigation)
Swift Navigation has announced that its Starling positioning engine is available with Broadcom’s dual-frequency GNSS receiver chip, the BCM47755.
The new solution is capable of delivering centimeter accuracy with minimal power consumption and small footprint for rapidly expanding precise positioning applications, the company said.
The Starling Positioning Engine is a modular and portable GNSS high-precision positioning engine that leverages Swift’s Skylark Cloud Corrections Service. Platform independent, Starling is an advanced GNSS processing engine that enhances the measurements from commercially available GNSS receivers to provide true precision and integrity capabilities.
Swift’s Starling software is GNSS receiver agnostic and works with a variety of GNSS chips and inertial sensors. According to the company, Starling features multi-band, multi-constellation support to provide centimeter-level accuracy and supports the calculation of integrity outputs to provide absolute position, velocity and time (PVT).
Broadcom’s BCM47755 chip now works with Starling. (Image: Broadcom)
Swift showcased the integration of Starling with the Broadcom BCM47755 chip — the latest generation of Broadcom GNSS receiver chip — during a recent test drive in California. The synergistic benefits of integrating Starling with the BCM47755 measurement engine include low system-level power consumption and a smaller PCB (printed circuit board) footprint.
The successful integration illustrated the accuracy of the combined solution and forthcoming offerings for autonomous vehicles including unmanned aerial vehicles, robotics, asset tracking, fleet management and other applications requiring precise positioning.
The BCM47755 simultaneously supports GPS and GLONASS in the L1 frequency band or GPS and Galileo in both the L1/E1 and L5/E5a frequency bands, the company added. Starling combines the GNSS raw observations from the BCM47755 with corrections from Swift’s Skylark Cloud Corrections Service to deliver centimeter-level positioning.
Horizontal Position
Horizontal CDF (Cumulative Distribution Function). (Chart: Swift Navigation)
“Broadcom is delighted to work with Swift in their integration of Starling and Skylark with our BCM47755,” said Vijay Nagarajan, senior director of product marketing for the Wireless Communications and Connectivity Division at Broadcom. “This is an exciting development for Swift and Broadcom, bringing together innovative hardware and software for the precise positioning market.”
“Swift has taken its mature Starling positioning engine that has long been powering Swift’s Piksi Multi and Duro receivers and made it interoperable with other industry leading chipsets to provide customers with a broader selection of precise autonomous navigation solutions,” added Samir Kapoor, executive vice president of engineering and product at Swift Navigation. “We are excited to offer an integrated solution with the Broadcom BCM47755 GNSS receiver chip.”
Evaluation Kit
Swift has developed an out-of-the-box evaluation platform for the combined Swift/Broadcom solution, called the Starling + BCM47755 Evaluation Kit, which will be available to order in the fourth quarter of this year.
The Evaluation Kit includes:
Starling Evaluation Board
Cortex-A7 Processor Running Starling Positioning Engine on Linux
Broadcom BCM47755 Chip
I/O – RS-232, Ethernet, USB, CAN
Supports SBP, NMEA and RTCM3 Protocols
Built in NTRIP Client
Built in Client for Skylark, Swift’s Cloud-Based GNSS Corrections Service
Dual Frequency, Multi-Constellation Antenna
External Cell Modem
Power Supply, Cabling and Accessories
Evaluation Kit Hardware Design Documentation, including Schematics and Layout
Evaluation Kit User Manual, Swift Console PC Application and Firmware Image
Mobile brand Xiaomi has launched a dual-frequency GNSS smartphone.
Fitted with a Broadcom BCM47755 chip, the Xiaomi Mi 8 provides up to decimeter-level accuracy for location-based services and vehicle navigation, the company said.
The Mi 8 smartphone represents a breakthrough in GNSS technology as the first commercial deployment of Broadcom’s dual-frequency BCM47755 chip designed for the mass market and introduced in September 2017.
Until now, mobile location-based applications have been powered by single-frequency GNSS receivers whose location accuracy is limited to a few meters. However, in recent years GNSS systems have been launching satellites broadcasting signals on new frequencies to open up new possibilities. Specifically, Galileo has the majority of satellites with E1/L1 and E5/L5 frequency capabilities.
The E1/L1 + E5/L5 GNSS chip can compute location with an accuracy of up to a few decimeters.
Leveraging Galileo for increased accuracy
According to the company, users of the Xiaomi Mi 8 and future models with dual-frequency GNSS will benefit from better positioning and navigation experience in urban environments. This is due to the unique shape of the E5/L5 frequency, which makes it easier to distinguish real signals from the ones reflected by buildings, reducing the multipath effect, a major source of navigation error in cities and other challenging environments.
The numerous Galileo satellites broadcasting E5 make this improvement available for users all around the world. In addition, the simultaneous use of two frequencies reduces other sources of error, such as those due to the ionosphere, and the frequency diversity is more robust to interference and jamming.
In addition to making existing applications more accurate, the enhanced position precision offered by dual-frequency GNSS will also create opportunities for new applications in areas such as augmented reality, vehicle navigation and mapping.
Commenting on the product launch, European GNSS Agency (GSA) head of market development Gian Gherardo Calini said that the arrival of the first dual-frequency GNSS smartphone to the mass-market represents a breakthrough for users all over the world.
“The enhanced accuracy provided will empower developers to create new applications that meet the growing high-accuracy location requirements of users and also open up applications that previously only ran in dedicated devices intended for professional use,” Calini said.
“Broadcom is glad to gear up Xiaomi’s flagship smartphones with the very latest dual-frequency GNSS technology,” added Alex Chou, vice president of product marketing for the Wireless Communications and Connectivity Division at Broadcom. “Xiaomi Mi 8, the world’s first smartphone with BCM47755, will take smartphone GNSS navigation to a whole new performance level.”
”The importance of GNSS to modern life is undisputed, and is particularly important for smartphones,” said Zhiyuan Zang, Xiaomi’s director of product marketing. “Navigation and LBS-based apps these days require greater positioning accuracy to work effectively, and dual-frequency GNSS is the key to delivering a great user experience when using these apps. Xiaomi is delighted and honored to be the world’s first smartphone manufacturer to support dual-frequency GNSS. We will continue to pursue innovation for everyone to enjoy.”
Access to raw measurements for geolocation
The launch of the first dual-frequency GNSS smartphone, together with the opportunities offered by the availability of GNSS raw measurements in Android, creates exciting opportunities for the geolocation community, the company said.
Access to raw measurements opens the door to algorithms once restricted to more advanced GNSS receivers. This, in turn, allows users to fully benefit from the differentiators offered by Galileo.
Recognizing these opportunities, in 2017 the GSA engaged with academia and industry in the areas of navigation and positioning to innovate around this new feature as part of a GNSS Raw Measurements Task Force.
Then, in January, the GSA published a white paper on the use of GNSS Raw Measurements in Android, providing developers with in-depth information on accessing and using raw measurements to implement advanced GNSS techniques in mass-market devices.
Building on this work, the GSA and the Raw Measurements Taskforce shared their latest updates at a dedicated workshop — “GNSS Raw Measurements: From Research to Commercial Use” — held at the GSA headquarters in Prague on May 30, where Broadcom presented its encouraging test results from the dual-frequency BCM47755.
For those who want high accuracy, but don’t need it full time, high-productivity dedicated professional solutions may not be cost-justified. In these cases, a “positioning as a service” subscription could offer a viable use model.
Achieving precision positioning with just a standard mobile device, a correction stream using the mobile device’s data connection and a high-accuracy positioning application produces a very low barrier to achieving high accuracy.
ByStuart Riley, Herbert Landau, Victor Gomez, Nataliya Mishukova, Will Lentz and Adam Clare, Trimble Inc.
We expect that for professional applications that need precision positions, a dedicated system that employs a custom GNSS chipset and purpose-built applications will continue to be the right solution. However, it becomes clear that the ubiquity of consumer mobile devices, with increasing computing power, ruggedness and an expanding feature set, presents fertile ground for new development of improved positioning systems that don’t have strict professional requirements.
A range of new use models and applications will be enabled by consumer mobile phones with technology that improves positioning performance. The goal of the work presented here is to assess what level of performance can be achieved by using proprietary PVT (position, velocity, time) engines utilizing GNSS measurements from the Android GNSS measurement application programming interface (API).
We first review GNSS measurement and positioning performance from a subset of the current Android phones/tablets currently on the market. Then we show the position performance achievable using precision engine with measurements from a dual-frequency GNSS chipset targeted for the cellular handset market. This class of device is expected to be integrated into consumer cellular devices on the market within the next 1 to 2 years.
Performance of Current Phones
We tested various devices including the Nexus 9 (which provides phase data) and various other Android devices that implement the new API. Most devices tested do not support phase data; of the few devices tested that do provide phase data, all except the Nexus 9 implement GNSS power duty cycling. This is a mode where the GNSS chipset is only active for a fraction of each second to reduce power consumption. This results in cycle slips each epoch, which makes carrier-phase processing for real-time kinematic (RTK) unusable.
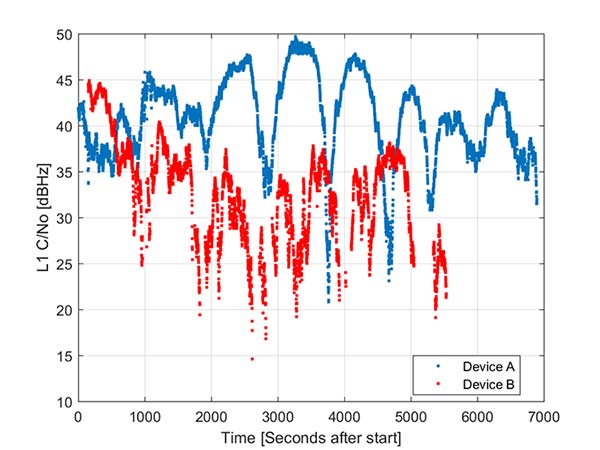
During the testing a wide range of performance across devices was observed. Figure 1 shows the C/NO for a high-elevation GPS satellite collected at the same time from two different Android models that implement the GNSS measurement API. The units were located in a clear environment less than a meter apart. Deep fades are present, most likely caused by deconstructive multipath.
Figure 1. Comparison of the C/NO from two different Android devices.
However, the devices show significantly different tracking performance: device B reports over 10 dB lower C/NO for much of the test and eventually stops reporting measurements. During our analysis, around six different Android devices have been tested; it isn’t clear whether the devices tested are typical over a broader population of device types.
Before attempting to position with observables from Android devices the measurement quality was analyzed. As only a subset of current devices that support the API provide phase information we wanted to evaluate both a phase-based RTK engine and a pseudorange/Doppler based code engine to determine what is possible from each class of device.
One of the devices tested was a Samsung S7 device. It provides pseudorange, Doppler and phase via the GNSS measurement API. However, the phone implements power duty cycling so after a short period of operation the duty cycling mode was enabled which resulted in a cycle slip on the phase every epoch.
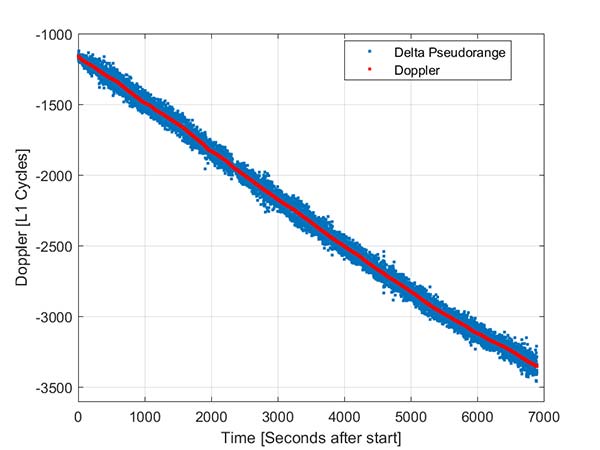
To derive an improved position from this class of device pseudorange and Doppler can be fed into a code-phase positioning engine. Fortunately, the Doppler provided by the device is of reasonable quality as can be seen from Figure 2.
Figure 2. Android GNSS observables: Doppler versus time-differenced pseudorange.
In this simple analysis measurements from a single high elevation satellite were analyzed. The Doppler is plotted along with the differenced pseudorange converted into L1 cycles. It can be seen that as expected the Doppler has much lower noise and so can be used in a pseudorange smoother.
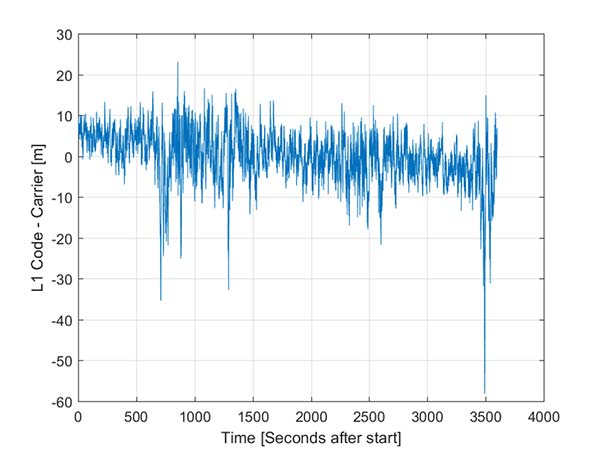
A simple way to view the pseudorange noise is to subtract the carrier phase from the pseudorange. If there are no cycle slips this should show ionospheric divergence with the noise dominated by the pseudorange noise. The absolute level is arbitrary as it includes integer carrier cycles. Figure 3 shows an example from an Android device.
The data was captured on a building roof in an open environment. There’s a slight downward trend due to the ionospheric divergence between code and carrier, but the metric is dominated by the pseudorange noise. For this example from a high elevation GPS satellite the standard deviation is 6.5 meters. For comparison, a precision receiver connected to a precision GNSS antenna providing unsmoothed pseudorange in this environment would have a standard deviation of a few decimeters.
Another way to assess the measurement performance is to form double difference residuals. Data was logged from pairs of identical devices mounted with a common orientation. An RTK system was used to measure the same point on each device. The camera lens location above the screen was used as the reference point.
An accurate vector between the two references points was computed and used as truth in a double-difference residual analysis. Even though we do not know the precise location of the phase center of the antenna, because the difference was performed between two devices that are the same model and have the same orientation the error in the phase center location is common and will cancel. Various pairs of devices were tested by being mounted on a wooden board on a tripod at approximately waist height. The test configuration is shown in Figure 4.
Figure 4. Android device test configuration.
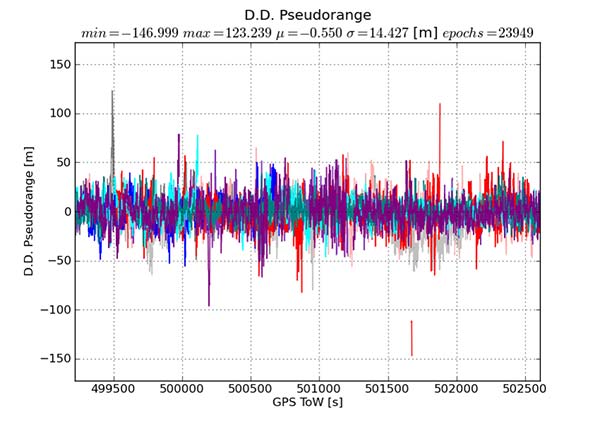
Figure 5 provides the double difference GPS L1 C/A pseudorange residuals between two Android devices. We see errors beyond 100 meters and a standard deviation across all data of 14.4 meters. A precision system (RTK or RTX/PPP) would use a standard survey quality base or network of bases and not an Android device for the correction data.
Figure 5. Short baseline double-difference pseudorange, Android devices.
Consequently in a typical operating mode where a precision data stream provides corrections, the contribution in a double difference from the pseudorange on the Android devices would be roughly half the Android-to-Android residual seen in this test or approximately 7.2 meters for this example.
For comparison, the same metric was generated between two precision GNSS units connected to antennas on the same roof. While the data was not from the same time period, we observe very consistent performance over time.
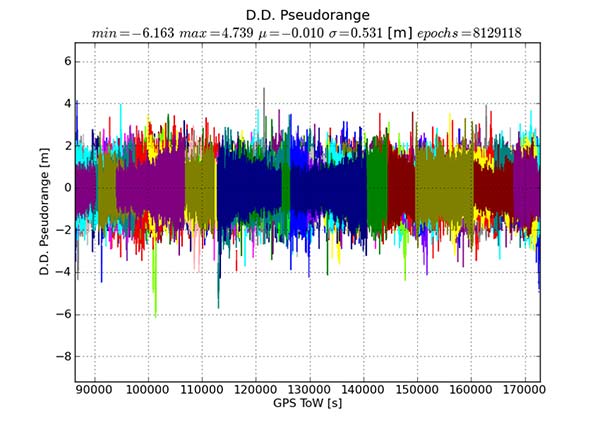
Figure 6 shows the same pseudorange double difference across a short baseline over 24 hours. When comparing Figures 5 and 6, note the difference in the scale on the pseudorange residual axis. The standard deviation from a pair of precision devices is 53 centimeters (cm) or 27 times lower noise than an example pair of Android devices.
Figure 6. Short baseline double-difference pseudorange, precision devices.
All phones that provide GNSS measurements via the Android API publish the phase data in the accumulated delta range field. An accumulated delta range is not necessarily a full phase measurement; it can have an arbitrary starting phase.
For example, in a precision GNSS receiver, if the receiver locks to a satellite and some time later locks a second channel to the same satellite, the phase measurement from the two channels may have a different integer cycle component, but the subcycle component would be the same except for millimetric tracking noise.
If the two channels are providing accumulated delta range the initial phase offset may differ by up to one cycle. From the population of Android devices that publish phase that we have tested we have not observed any devices that deliver true full phase.
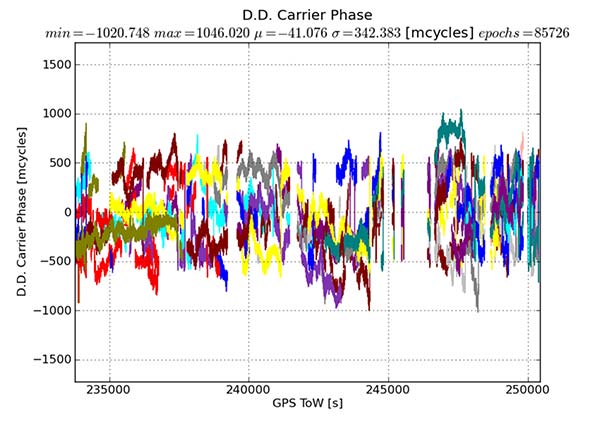
They all deliver an accumulated delta range with an arbitrary phase offset. This limits a phase engine to float processing and ambiguity fixing is not possible. The Android phase data collected from the previously described experiment was processed to provide the double difference carrier residuals. This is shown in Figure 7.
Figure 7. Short baseline double-difference phase residuals, Android devices.
The y-axis is in millicycles (1,000 millicycles = 1 cycle or approximately 19 cm for L1 GPS). Jumps are seen as the reference satellite changes or when the measurements have cycle slips. In this case the standard deviation is 342 millicycles. A double difference residual on a precision receiver in a similar environment with a high-quality antenna on a short baseline is an order of magnitude lower than this.
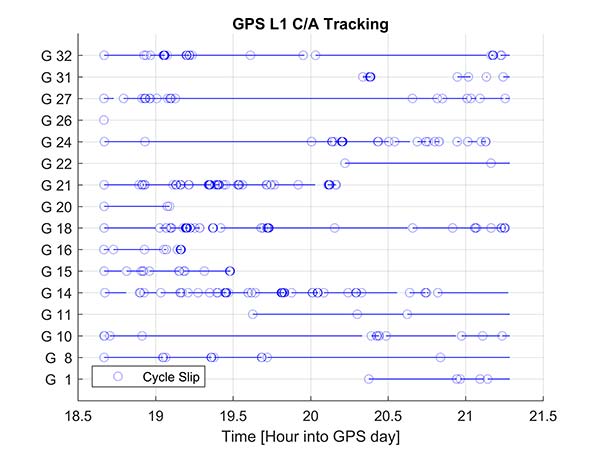
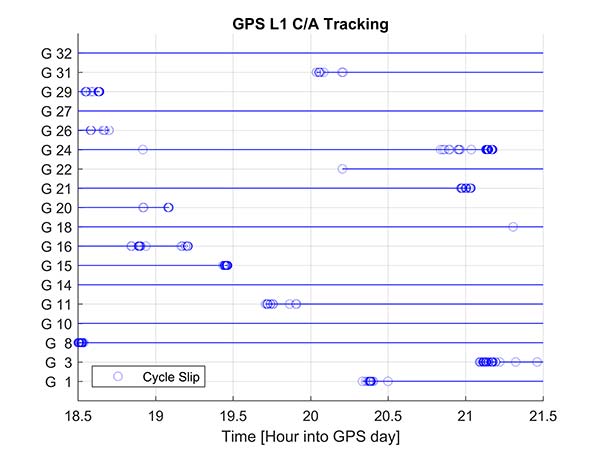
Another useful metric to review are the number of reported cycle slips. Figures 8 and 9 show a comparison of the cycle slips reported on GPS L1 C/A from an Android device compared to data logged on a precision receiver over the same time span. The receiver tends to only cycle slip at low elevation; the device had a zero-degree mask. The Android GNSS device cycle slips at higher elevations, probably a result of deep multipath fades due to the poorer antenna.
In an ION GNSS+ 2017 paper, we showed the achievable position performance using an RTK engine that had been previously customized to operate with measurements from consumer GNSS chipsets. It operated in a float mode due to the sub-cycle issue found in phase data from Android devices.
We also demonstrated the performance from a precision code-based PVT engine that had changes to the a priori measurement error estimate, a modified pseudorange/Doppler Hatch filter and used SBAS data to correct the position. As very few current Android devices deliver phase information the two engines were used to analyze what is possible today with the pseudorange and may be available in the future as phase is more universally available.
Data was processed from a Nexus 9 tablet, the only known Android device that has GNSS power duty cycling disabled. The unit was unmodified and so the Android tablet’s integrated GNSS antennas were used. The 2D performance is given in Table 1.
Table 1. 2D performance from Nexus 9 Android tablet.
Only GPS L1 and GLONASS L1 measurements were used and the RTK float solution delivered similar performance to the pseudorange solution. This is due to a combination of issues, very high pseudorange noise, and a significant number of cycle slips (see Figures 5 and 8). Only single frequency data was available, and while the engines used had been tuned for consumer data, they were not specifically designed for this class of data.
Next-Generation Phones
Within the next couple of years improved chipsets are expected to be available to consumers that will result in improvements in achievable positioning performance. In May 2017, Broadcom provided us with a development kit for its next generation L1/L5 multi-system BCM47755 GNSS chipset. This allowed us to assess what may be possible when improved GNSS chipsets are integrated in the next generation of cellular devices.
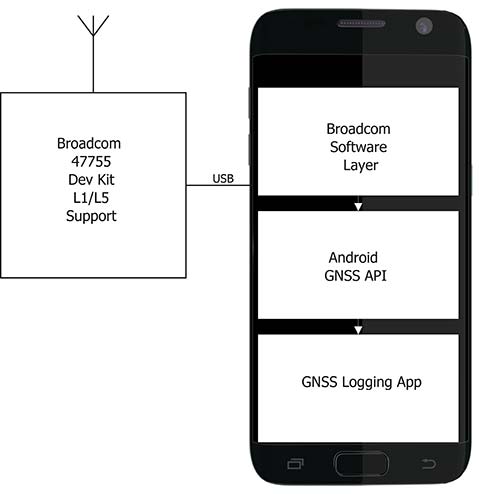
Figure 10. Broadcom BCM47755 development system.
The development environment included the GNSS chipset with an external antenna port so both a cell-phone equivalent antenna and a precision antenna could be compared. This allowed us to evaluate the impact of the antenna performance on the GNSS observables and positioning results. The Broadcom GNSS development system communicates via USB to a Samsung S7 phone and publishes data via the Android GNSS measurement API so the equivalent data flow of an integrated cellular device is maintained (see Figure 10).
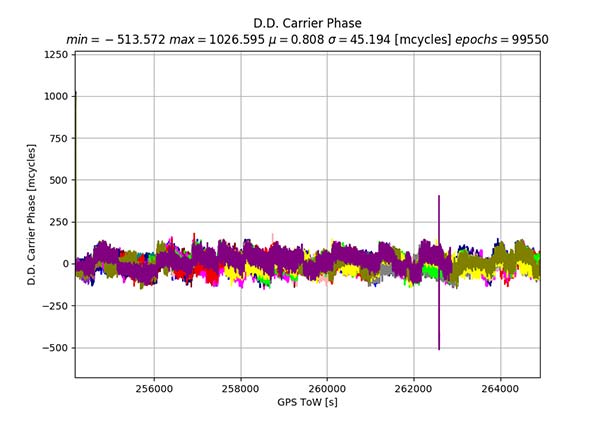
In our ION paper, we showed the typical phase double-difference residuals observed from current Android devices. The Broadcom BCM47755 originally provided similar performance, although it also supports GPS L5 and Galileo E5A. In November 2017, Broadcom provided a firmware update that resolved the sub-cycle phase issues. With the updated Broadcom software, the double difference carrier residuals for GPS L1 on a zero baseline when differencing a precision receiver to a Broadcom BCM47755 are shown in Figure 11.
Figure 11. Precision GNSS to Broadcom BCM47755 zero baseline double difference carrier-phase residuals.
The standard deviation is 45 millicycles which is approximately 8.6 millimeters (mm). This is substantially better than earlier implementations of the Android GNSS interface (see Figure 7) and sufficient to perform RTK ambiguity resolution.
The rest of the results in this article were obtained with the improved firmware along with a new precision position engine. This engine was designed from inception to support GNSS measurements with differing quality and so can more optimally process the Android GNSS data. The effect of the improvements to the Broadcom firmware and the change in the processing engine can be seen if the results in our ION paper are compared to the data in this section.
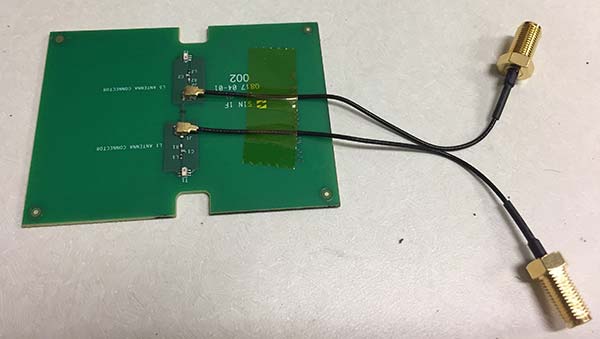
To attempt to model what may be possible with a phone based on a next-generation chipset, a cell-phone equivalent antenna provided by Broadcom was used in some of the tests with the development system, as shown in Figure 12. This device has separate feeds for L1 and L5.
Figure 12. Cellular equivalent antenna.
Datasets were collected with the multi-frequency GNSS BCM47755 device. The data was captured in the Android GNSS measurement API format and converted to proprietary format files for further processing. All data was collected in Sunnyvale, California.
Measurements from GPS L1/L5, Galileo L1/E5A, GLONASS L1 and BeiDou B1 were logged and analyzed. The Precise Positioning Engine (PPE) allows performing carrier-phase RTX and RTK and a pseudorange-based solution using the RTX corrections. Tests were performed by using a precision antenna and a cell-phone equivalent GNSS antenna.
With Precision GNSS Antenna
These datasets were collected on a zero baseline with a precision receiver to allow a direct comparison of results with a professional receiver. The first test was on Nov. 22, 2017, where the Broadcom GNSS chip and the receiver were connected to the same professional antenna.
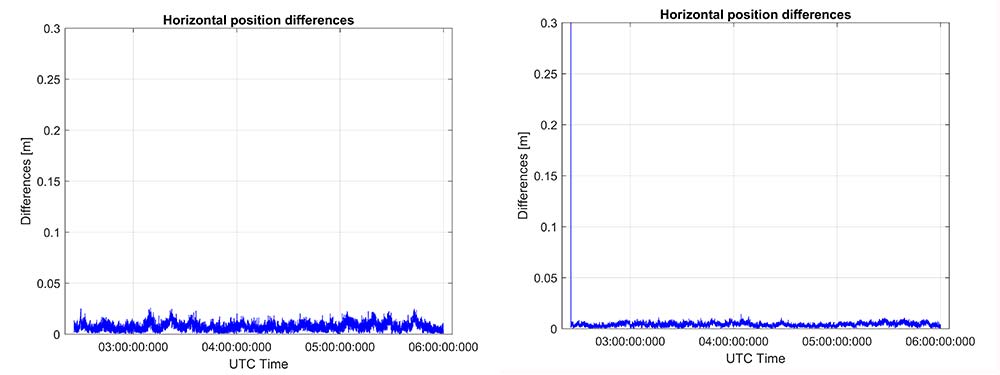
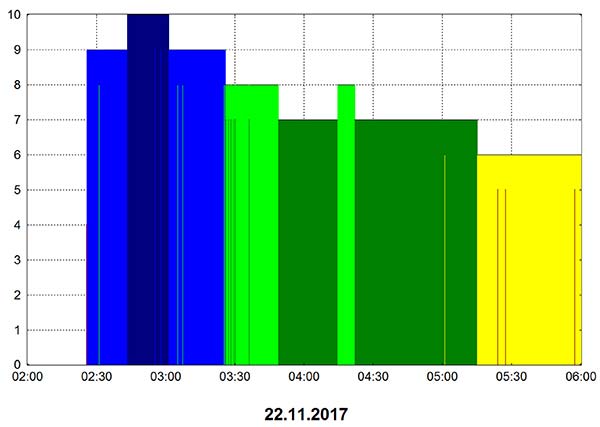
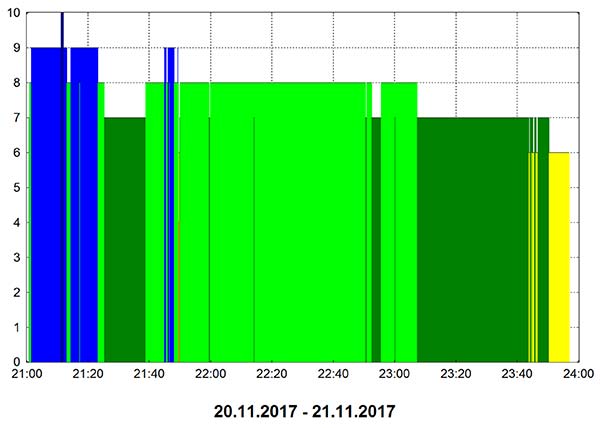
As seen in Figure 13, both GNSS receivers provide centimeter-level accuracies after some convergence time. With the current satellite constellations, only a third of the GPS satellites have L5 and only about half of the E5-capable Galileo constellation is in space. During this 3.5-hour test, the number of dual-frequency measurements processed by the engine that used the Broadcom chipset — data that does not support L2 — ranged between 6 and 10 satellites (Figure 14).
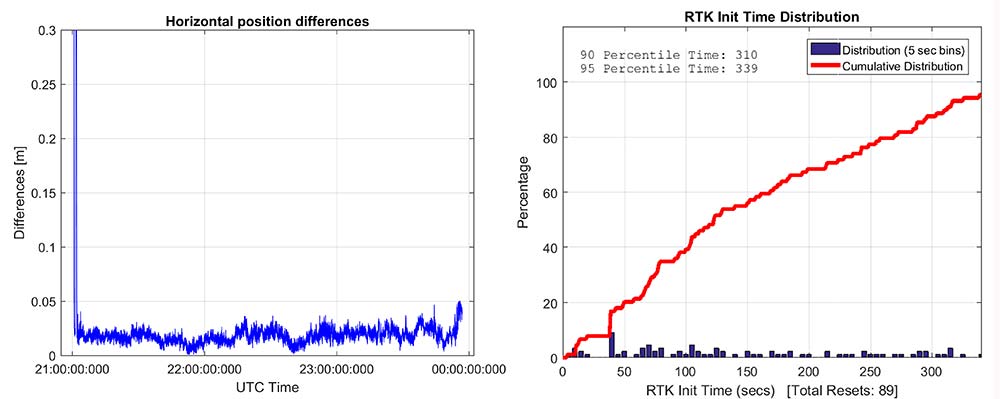
Figure 13. RTK performance for a 3.5-hour dataset sampled on Nov 22. Broadcom chip at left and precision chip at right. A short baseline was used — precision antenna.Figure 14. Number of GPS L1/L5 plus Galileo E1/E5A dual-frequency measurements used by the position solution based on the Broadcom chipset — precision antenna.
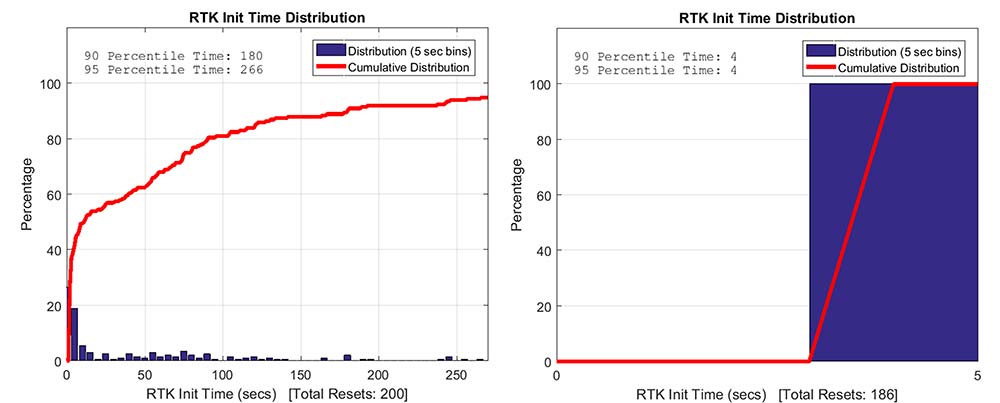
Convergence times were measured with post-processing tools by splitting the datasets into individual time spans. Figure 15 shows that the consumer GNSS chipset is able to get fixed ambiguity solutions but it takes considerably more time (266 seconds versus 4 seconds) for the 95% of initializations. However, the system is fixing ambiguities and provides centimeter level positioning.
The same datasets were also processed with RTX-Fast in California. Thus the base station data was replaced by a global/regional correction stream received from an internet-based data source (Figure 16).
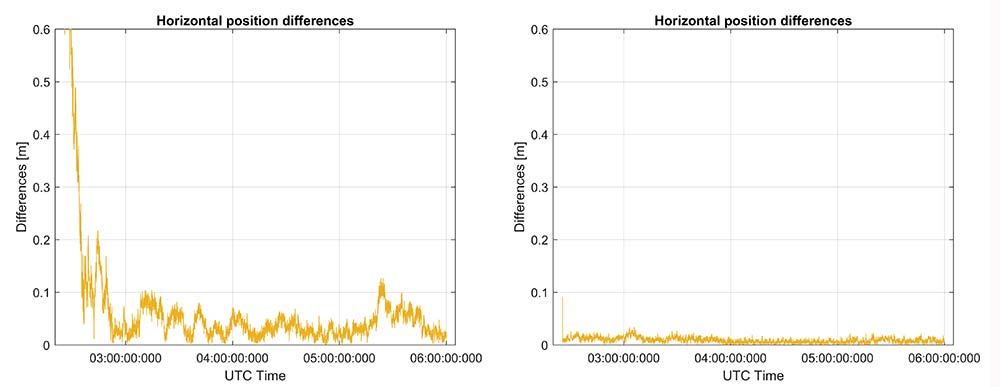
Figure 15. RTK initialization performance, dataset sampled on Nov 22. Broadcom chip at left and precision receiver at right — precision antenna.Figure 16. RTX performance for a 3.5 hour dataset sampled on Nov. 22 (Broadcom chip at left and Trimble chip at right) — precision antenna.
Horizontal accuracy for Broadcom reach 10 cm while the precision receiver reaches better than 3 cm. The degradation is in part due to the difference in quality of the carrier phase and the different number of dual frequency satellites processed. Precision devices provide measurements on E1/L1, L2 and L5/E5 providing at least dual frequency data from GPS, GLONASS, Galileo, BeiDou and QZSS.
The Broadcom chipset tested provided dual frequency GPS and Galileo along with single-frequency GLONASS and BeiDou; however, due to limited BeiDou constellation visible in California, data from this constellation was not used.
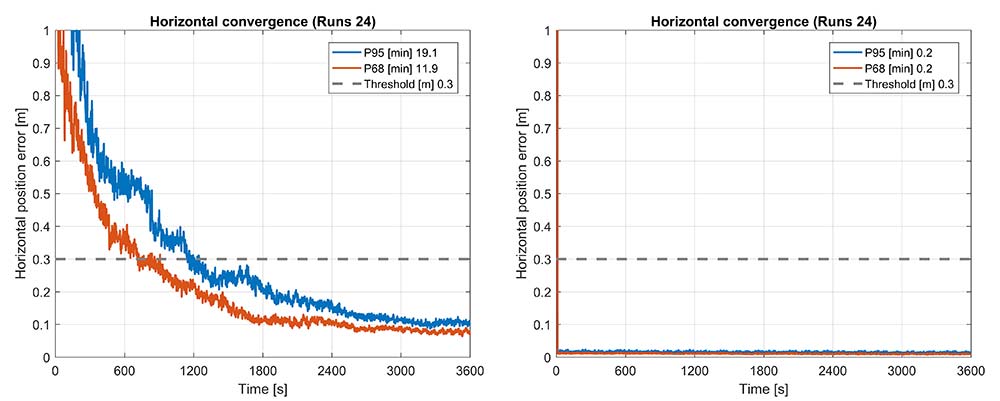
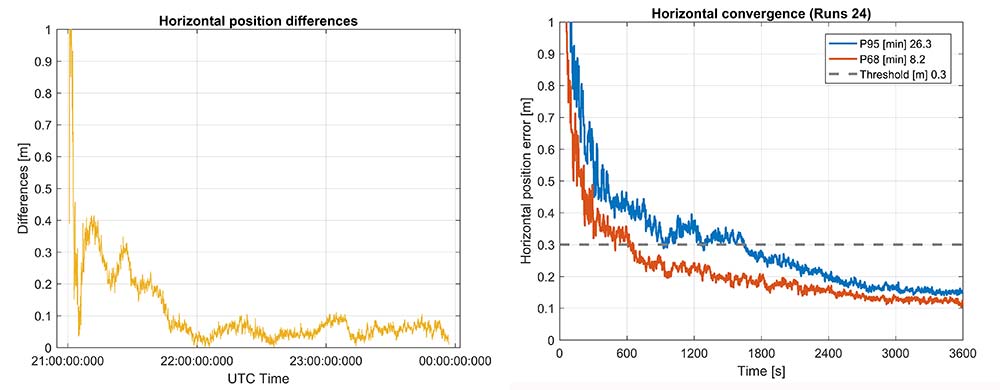
Convergence was also analyzed and is shown in Figure 17. From the data, we generated 24 convergence runs by taking one hour, progressively shifting the start time by 5 minutes and running the data with different start times through the PPE engine. This produced 24 runs, which were translated into 68% and 95% convergence statics shown.
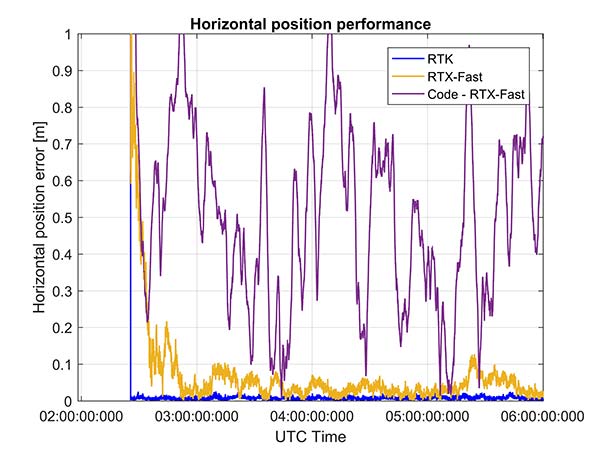
Figure 17. RTX convergence performance for a 3.5-hour dataset sampled on Nov. 22. Broadcom chip at left and precision chip at right — precision antenna.Figure 18. Code RTX performance for 3.5-hour dataset sampled Nov. 22 and corresponding RTK and RTX phase solutions — precision antenna.
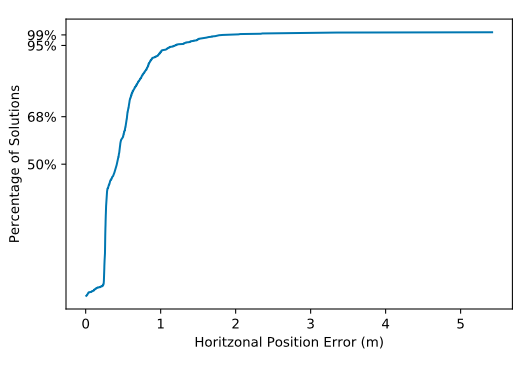
The RTX-Fast solution for Broadcom reaches 30 cm horizontal error in 68% of the cases in approximately 12 minutes. The RTX-Fast convergence using precision GNSS data is near instantaneous as can be seen in the right of Figures 16 and 17, reaching centimeter accuracy.
The code position solution using the RTX correction stream provides sub-meter positioning (Figure 18).
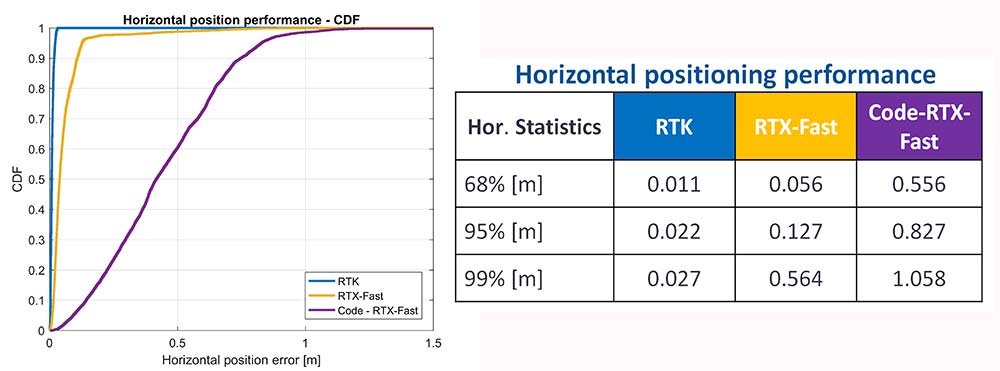
As a summary, the cumulative distribution function plots (Figure 19) show the performance differences for this static environment, on Nov. 22.
Figure 19. CDF plots for the different PPE position solutions — precision antenna.
Cell-Phone GNSS Antenna Results
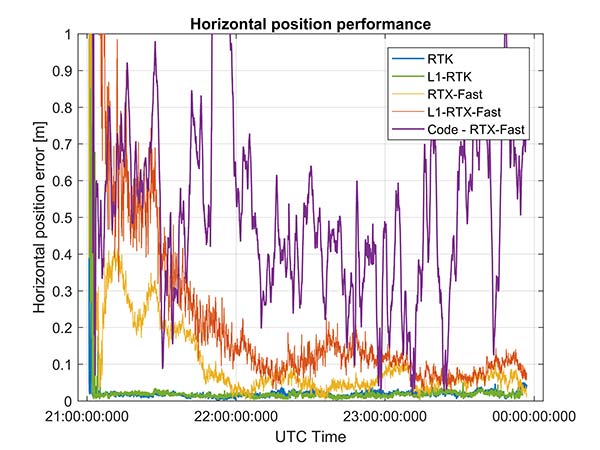
Similar tests were performed using an external cell-phone GNSS antenna, which is close to the antenna used in a typical smartphone. RTK performance shows centimeter-level accuracies and reasonable convergence times, which are slightly worse than the results with the professional antenna (Figures 20–24).
Figure 20. RTK positioning and initialization performance for the Broadcom chip and the cell antenna sampled on Nov 20 — cell-phone GNSS antenna.Figure 21. RTX-Fast positioning and convergence performance for the Broadcom chip and the cell antenna sampled on Nov. 20 — cell-phone GNSS antenna.
In general as expected we achieve worse performance when connected to the GNSS cell-phone antenna for all the different positioning modes. For the cell antenna we also generated single-frequency RTK and single-frequency RTX-Fast position solutions and compare it with a code positioning solution.
Positioning Engine in Android
Figure 22. Number of GPS L1/L5 plus Galileo E1/E5A dual-frequency measurements used by the position solution based on the Broadcom chipset — cell-phone GNSS antenna.
The results presented in this article captured GNSS data using the Android API and then post-processed the data using PC versions of the position engines. A significant amount of data has been captured and analyzed using this method.
For the purpose of real-world demonstration the PPE has been implemented in an Android app to be used in cell phone devices. This PPE is able to provide RTK, RTX and code based positioning technology in one single PPE library.
The app has been tested running on a Samsung S7 connected to Broadcom’s new chipset development kit as well as a Nexus 9 tablet that uses an older generation GNSS chipset.
Figure 23. Code RTX performance, the dataset sampled Nov. 20 and corresponding RTK and RTX phase solutions — cell-phone GNSS antenna.
Future work will refine this solution as well as evaluate how well the system works when mobile. The data collected in this article operated in an environment with a clear view of the sky. We plan to characterize what happens when the platform moves with both pedestrian and automotive dynamics, as well as the effects of body masking and challenges with changes to the GNSS antenna reception pattern when the phone is held.
Summary
While this article has highlighted that sub-meter and centimeter accuracy have been achieved in a laboratory environment, there are many challenges to be addressed before centimeter accuracy in a phone can be achieved with performance suitable for users in real-world environments.
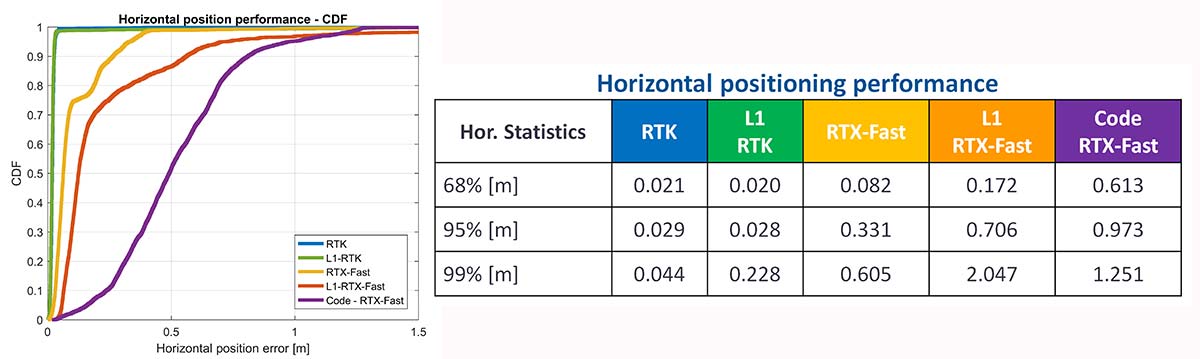
Figure 24. CDF plots for the different PPE position solutions for cell antenna dataset.
The challenges include very high multipath, significant differences in the tracking performance between different devices, and high rates of cycle slips. As very few Android-based devices provide continuous phase, a pseudorange/Doppler-based engine has been modified to accept Android data.
Based on the testing with existing devices it is possible to achieve position solutions of 1–2-meter accuracy in ideal static scenarios. This is a significant improvement in accuracy for Android based devices.
Figure 25. PPE engine on a Samsung S7 with a Broadcom BCM4775 evaluation kit.
However, as performance differences were observed between different mobile devices significantly more data needs to be collected over a larger set of devices to review the repeatability of these preliminary results from existing Android devices.
The Broadcom BCM47755 development kit for a dual-frequency GNSS chipset intended for future phones has allowed us to review the potential position performance that may be achievable in a handset in a few years.
By connecting this next-generation GNSS chipset to a GNSS antenna typical of a cellular device and comparing the performance from a precision GNSS antenna, we’ve shown for the first time that it is possible to produce precision positions from a static cellular class GNSS device in ideal conditions at the centimeter level with both an RTK solution and a PPP solution.
However, due to the significantly higher measurement noise and high multipath from the cellular device’s GNSS antenna, the convergence times to reach centimeter level remain a challenge; although using dual-frequency phase data from a cellular GNSS chipset with a PPE and RTX service, the position is very rapidly sub-meter.
Future work will focus on analyzing how the performance changes when operating in the normal user environment. The effects on the measurements of user motion, body masking and de-tuning of the antenna when the device is held need to be quantified. The Nexus 9 tablet used in this article does not have integrated cellular. The Broadcom development kit connects to the phone via a cable and is also not integrated into the handset.
We will be evaluating what may happen with a more integrated unit to make sure emissions from devices with integrated cellular very close to the GNSS antenna do not result in further degradation.
As the position performance is very sensitive to the quality of the antenna from both multipath and cycle slips due to low C/NO and deep fades, we’ll also evaluate how well the performance of the PCB-based GNSS antenna, which is part of the BCM47755 evaluation kit, matches current handsets.
Acknowledgment
This article further develops work first shown in an ION GNSS+ 2017 paper, “On the Path to Precision — Observations with Android GNSS Observables.”
Manufacturers
Trimble CenterPoint RTX is the satellite orbit and clock corrections service used here, enabling a PPP-like positioning with ambiguity fixing, providing better than 4 cm with typically less than 10 minutes’ convergence.
RTX-Fast functionality in Europe and parts of California uses regional atmospheric models to provide better than 4-cm horizontal in typically less than one minute. When precision and professional receivers and RTK engines are mentioned in this article, they are Trimble devices, the BD940 receiver in some cases.
A Trimble Zephyr 3 antenna was used in many tests shown here.
A: During development of dual-frequency GLONASS RTK support for the Piksi Multi GNSS receiver, GNSS signal simulation was used to test corner cases that are infrequent but catastrophic, such as whole constellation failures. We combined this with our custom-built hardware-in-the-loop infrastructure to test nightly on relevant GNSS scenarios, gaining statistical significance through thousands of runs of the receiver. This iterative approach allowed us to develop GLONASS RTK support in a mere five months.
Andreas Warloe, Senior Director, Systems Engineering, Broadcom Limited
A: GNSS signal simulation was used in all stages of our GNSS chip design and development. Simplified single- or multi-satellite simulations were used to verify search and track channel designs, and carefully calibrated simulations were used to characterize receiver losses. Later, full system simulations were used in large-scale regression testing, interference testing and corner case tests. Simulator testing has been critical for supporting new signals that weren’t widely available in the early chip design phases.
A: We use GNSS simulators throughout the design cycle, from prototyping to mass production. The benefits of testing in a reliable, repeatable lab environment became very clear when we needed to exercise co-location of Bluetooth and GNSS in a module. Testing in a controlled signal environment allowed us to keep the GNSS signals constant while adjusting the Bluetooth signal levels, allowing us to verify the robustness of our design over the full temperature and voltage range.
It is a beautiful, crisp afternoon, the last of the summer, as I write and as we prepare for next week’s ION GNSS+ conference, where GPS World and sponsors Harris Corporation, Rockwell Collins and Spirent Federal Systems will host the 2017 Leadership Dinner and confer this year’s Leadership Awards in Satellites, Signals, Services and Products.
The engraved glass awards nestle snug in their boxes beside me, the names upon them known only by a few.
However, as you read this, it is early October — and hopefully another beautiful crisp afternoon among autumn’s best — and those glass awards are safe at home with their new owners. Their names are known by all 125 Leadership Dinner attendees, and now by you as well. We will publish their spoken remarks in the December issue. Here now are the basic details.
The voting ballot for the awards was assembled by polling a group of roughly 25 industry VIPs for their nominations, and that same group plus another 40 voted for the final recipients.
The 2017 Leadership Award for Satellites went to Wolfgang Paetsch, director of Navigation for OHB, primarily responsible for the space projects that the company executes for the European Space Agency (ESA) and the European Union. He was nominated for his leadership in setting up the routine production of the Galileo satellites leading to Galileo constellation deployment, including the quadruple Ariane 5 launch in November 2016. As one voter remarked as he cast his ballot, “The quadruple launch capability is a key enabler for the future.”
The Leadership Award for Signals was conferred upon Christopher Hegarty, director for Communications, Navigation and Surveillance Engineering and Spectrum at The MITRE Corporation, for contributions to the Department of Transportation’s GPS Adjacent Band Compatibility Assessment. Said Compatibility Assessment has been a long and winding road, and has required several sure hands, Chris’ among them, to guide it. We hope to publish something on its outcomes soon.
The Leadership Award for Services was given to Patricia Doherty, director and senior scientist at the Institute for Scientific Research at Boston College, for initiating and leading the Africa GNSS Outreach program since 2009. The program’s mission is to help developing countries derive social and economic benefits from satellite-based positioning, navigation and timing. Each year, around 50 graduate students and faculty from African and other countries attend these GNSS workshops. The faculty reads like a Who’s Who of satnav scientists and teachers, testifying to both Doherty’s formidable recruiting talents and the dedication of this community to knowledge-sharing around the world.
2017 GPS World Leadership Awards.
The Leadership Award for Products was a tri-partite affair, going to colleagues Charles Abraham and Andreas Warloe, vice president of Engineering and senior director of GPS Engineering, respectively, at Broadcom. As the chief designer and the architect of the first dual-frequency L1/L5 E1/E5 GNSS chip for smartphones, they are helping to usher in a new era of high-precision GNSS in mass-market products. See this article for more details on the just-launched product.
The two shared the award with Javier de Salas, director of Software Engineering at Broadcom, for leadership in establishing Galileo-ready receiver products.
A good time was had by all at the Leadership Dinner, which also included the PNT Powerplay Puzzle and Pig-in-a-Poke Live Auction. Details in December!