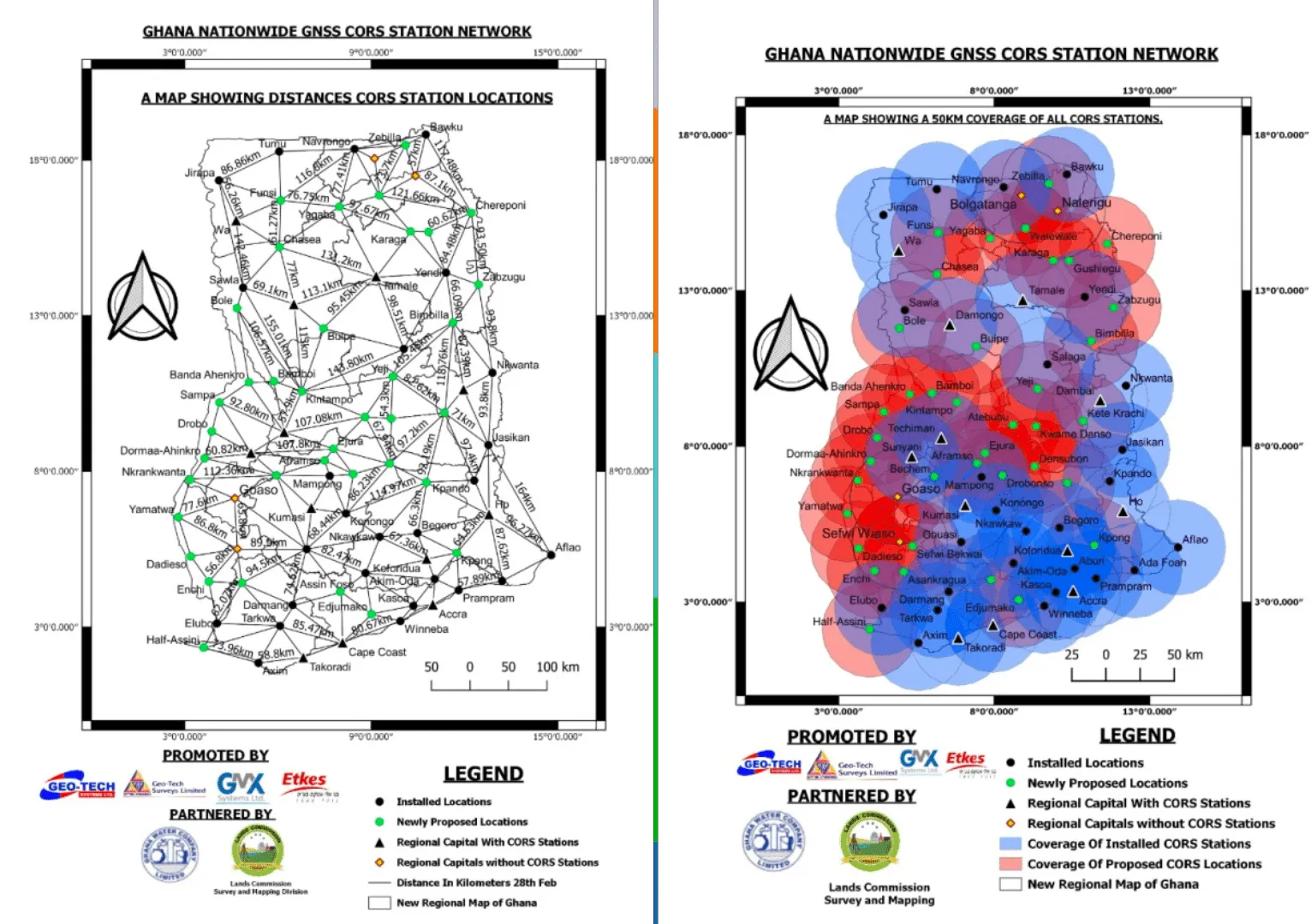
Ghana Lands Commission, through its Survey and Mapping Division (SMD), in collaboration with the Licensed Surveyors Association of Ghana (LiSAG) and GMX Systems Ghana Limited, has launched a nationwide observation exercise for Ghana’s GNSS Continuously Operating Reference Station (CORS) Network.
This initiative is a major milestone in modernizing the country’s geospatial infrastructure and improving land administration.
The exercise aims to integrate more than 60 newly established CORS stations into the national geodetic framework, consolidating Ghana’s Grid Coordinate System. The partners plan to expand the network to 100 stations before the end of the year.
With a modern CORS network, surveyors and spatial data users will have 24/7 access to high-precision data, improved efficiency and cost savings, while aligning Ghana with international geospatial standards.
It will improve accuracy for land records, agriculture, disaster management, infrastructure development, and revenue generation for the Lands Commission. The observation will be rolled out in three phases — Southern, Middle, and Northern zones — to ensure systematic coverage and data management.
On July 23, 2025, the National Geodetic Survey (NGS) sent a news notice announcing the rollout plan for remaining NSRS modernization products, including OPUS Products Changes, and on June 11, 2025, they sent a news notice to users stating that NGS’s Multi-Year CORS Solution 3 (MYCS3) was released. This newsletter will highlight these two News notices and what they mean to users of the United States National Spatial Reference System (NSRS).
A colleague recently reminded me that the new NSRS is more than just a technical update — it presents an ideal opportunity to review existing processes and workflows, address current products and process considerations, and strategically plan for future requirements. It is well known that the new NSRS will significantly improve geospatial data accuracy. Improved accuracy and reliability of geospatial data empower management to make more informed decisions and optimize resource allocation. NSRS users should proactively assess their geospatial data dependencies and evaluate how adoption of the new datum will affect workflows, datasets and operational decision‑making. I will provide you with more information at a later date.
NGS NEWS
Rollout Plan for Remaining NSRS Modernization products, including OPUS Products Changes
On June 17, 2025, NGS released the first preliminary products of the modernized National Spatial Reference System (NSRS) for beta testing and feedback. In the coming months, additional products listed below will be made available. As each product is released, it will undergo at least six months of testing preceding the final adoption and implementation of the modernized NSRS.
The descriptions below supersede previous updates or information shared in NSRS Modernization blueprint documents, plans, or presentations. These products and their status will be described on the Track Our Progress webpage.
The Data Delivery System (DDS) landing page will provide an updated version of the “NGS Map” and “Looking for Benchmarks” pages. This new landing page will allow you to access modernized informational pages about geodetic stations and geodetic marks.
Geodetic station pages will offer an updated version of the current NOAA CORS Network (NCN) station pages. Geodetic mark pages will be updated datasheets, replacing the current ASCII text file version of datasheets. The updated coordinates (reference epoch coordinates) for marks and updated CORS coordinate functions (CCFs) for CORSs in the modernized NSRS will be available through these pages.
The NGS Coordinate Conversion and Transformation Tool (NCAT) will be updated through multiple versions, currently with state plane coordinates, then later adding support for various geopotential calculations including ellipsoid/orthometric height conversion as well as NADCON (geometric) and VERTCON (orthometric) transformations from the current NSRS to the modernized NSRS.
OPUS-Static will function similarly to today’s tool, but it will operate with the modernized NSRS, including the support of multi-GNSS data. Additionally, the popular function of “sharing” your solution with others (colloquially called “OPUS-Share”) will be retained, but with appropriate caveats that the shared solution should not be used as geodetic control. These shared solutions will be available through the geodetic mark pages of the DDS.
The following products will not be included in the release of the modernized NSRS. However, plans to replace the services or mitigate gaps are described below.
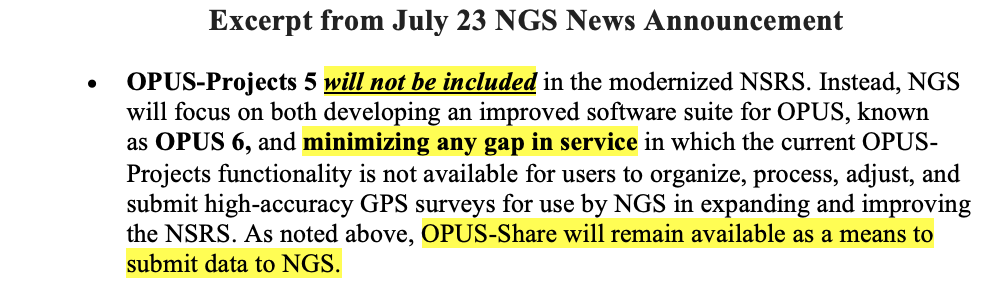
OPUS-Projects 5 will not be included in the modernized NSRS. Instead, NGS will focus on both developing an improved software suite for OPUS, known as OPUS 6, and minimizing any gap in service in which the current OPUS-Projects functionality is not available for users to organize, process, adjust, and submit high-accuracy GPS surveys for use by NGS in expanding and improving the NSRS. As noted above, OPUS-Share will remain available as a means to submit data to NGS.
OPUS-Rapid Static (OPUS-RS) will not be included in the modernized NSRS. Instead, the modernized version of OPUS-Static, noted above, will be capable of processing multi-GNSS static data files that are shorter in duration (i.e., less than 2 hours).
Note: the current OPUS Projects 5 software will be supported until the modernized system is adopted, and a deadline for OPUS-Projects users to submit their surveys for publication will be announced with at least six months’ notice.
To stay informed about these releases, please subscribe to NGS News. If you have questions, please email [email protected].
Now, I would like to address the issues associated with July 23, 2025, announcement. This NGS News announced the rollout plan for the remaining NSRS modernization products. I have highlighted several sentences in this announcement that I believe users need to understand to determine the impact on their processes and workflows that are used to generate their products and services.
The news announcement states that NGS released the first preliminary products of the modernized National Spatial Reference System (NSRS) for beta testing and feedback. My July 2025 GPS World Newsletter highlighted these preliminary products. It mentioned that in the coming months, additional products will be made available. Each product will undergo at least six months of testing preceding the final adoption and implementation of the modernized NSRS. This seems to be a good process, but users need to understand the complete message.
The NGS News announcement provides a list of products that will be available and a list of products that will not be available when the new NSRS is adopted. Users need to understand what products will not be available after NGS officially adopts the new NSRS so they can determine what that means to their workflow process and client requirements. In my opinion, for the new NSRS to be successfully implemented by users, it is essential that all the necessary software tools are available to enable users to submit projects for review, approval, and publication by NGS. As many of you know, when I worked for NGS, I was the Project Manager of the North American Vertical Datum of 1988 (NAVD 88). That said, from my experience as the NAVD 88 Project Manager, having the appropriate tools available was important for users to implement NAVD 88. As a matter of fact, NGS accepted and processed vertical control data in both NGVD 29 and NAVD 88 for a period to assist users in the implementation of the new vertical reference datum.
It is important to note that the NGS News Announcement states that OPUS-Project 5 will not be included in the new NSRS when it is officially adopted. See the below image.
Since OPUS Projects 5 will not be supported after the modernized system is adopted, users will not be able to submit their projects for review, approval, and publication by NGS like they can do today. NGS does indicate that they will be working on OPUS 6 to “minimize any gap in service.” There are a few questions that I believe should be addressed: (1) What does “minimize any gap in service” mean? Is this one month, one year, or several years? (2) Why must the new NSRS be adopted before users can submit their projects to NGS for official publication? And (3) Why should users use OPUS-Share when NGS itself advises against relying on OPUS-Share results for establishing geodetic control? If the federal agencies and surveying community allow the new NSRS to be adopted before OPUS 6 is available or OPUS Project 5 is modified for use in the new NSRS, the only way to get an updated coordinate such as NATRF2022 and NAPGD2022 using NGS process will be to use NGS OPUS-Share products. Again, NGS states that OPUS-Share results should not be used as geodetic control. See NGS’ statement on OPUS Share below.
This is NGS’s statement on OPUS-Share: Additionally, the popular function of “sharing” your solution with others (colloquially called “OPUS-Share”) will be retained, but with appropriate caveats that the shared solution should not be used as geodetic control. These shared solutions will be available through the geodetic mark pages of the DDS.
Using OPUS-Share results that are NOT official NSRS coordinates published by NGS could lead to confusing results and potential lawsuits since NGS does not stand behind the results and recommends NOT using OPUS-Share results for geodetic control. Why would users use OPUS-Share to establish geodetic control when NGS itself advises against relying on OPUS-Share for establishing geodetic control? OPUS-Share results are not officially submitted to NGS for review, approval, and publication on an NGS Datasheet. I don’t believe this approach will meet the needs of users who require their projects to be reviewed, approved, and published by NGS. What is your opinion? You should let NGS, and others know your thoughts and concerns about NGS’s rollout plan for remaining NSRS modernization products.
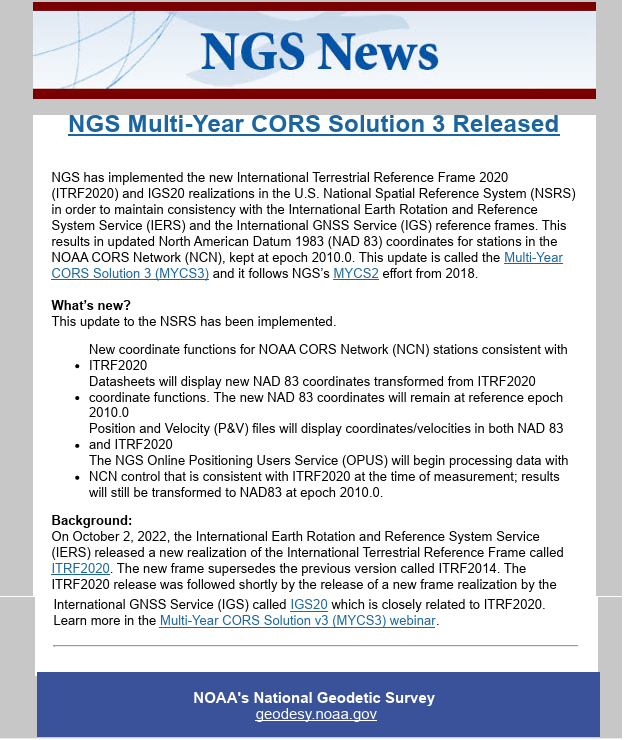
Now for the release of NGS’s Multi-Year CORS Solution 3 (MYCS3).
NGS MYCS 3 released (Credit: NGS)
First, why did NGS perform the NGS Multi-Year CORS Solution 3 (MYCS3)? To maintain consistency with the International Earth Rotation and Reference System Service (IERS) and the International GNSS Service (IGS) reference frames, NGS has implemented the new International Terrestrial Reference Frame 2020 (ITRF2020) and IGS20 realizations in the U.S. NOAA CORS Network (NCN). What this means to NSRS users is that NGS has updated the North American Datum 1983 (NAD 83), epoch 2010.0 coordinates for stations in the NOAA CORS Network (NCN). This update is called the Multi-Year CORS Solution 3 (MYCS3).
In summary, the MYCS3 news notice states the following:
The coordinate functions for NOAA CORS Network (NCN) stations are now consistent with ITRF2020,
NGS datasheets will display the new NAD 83 coordinates transformed from ITRF2020 coordinate functions,
The new NAD 83 coordinates will be referenced to NAD 83 2011 (epoch 2010.0),
Position and velocity files will display coordinates/velocities in both NAD 83 and ITRF2020, and
The NGS Online Positioning Users Service (OPUS) will begin processing data with NCN control that is consistent with ITRF2020 at the time of measurement; and the results will still be transformed to NAD 83 2011, epoch 2010.0.
The first question that everyone asks is, what are the changes to the coordinates in my region? And, of course, why was it necessary to do this update now, but that’s a discussion for another day. I downloaded the data and prepared a few plots and a table to depict the differences between the new and old coordinates. First, it should be noted that the old NCN coordinates were published in ITRF 2014, epoch 2010.0, and the new NCN coordinates are published in ITRF 2020, epoch 2020.0. So, there will be differences in coordinates because of updates between ITRF2014 and ITRF2020, and because the CORS ITRF 2020 coordinates are published at epoch 2020.0 instead of 2010.0.
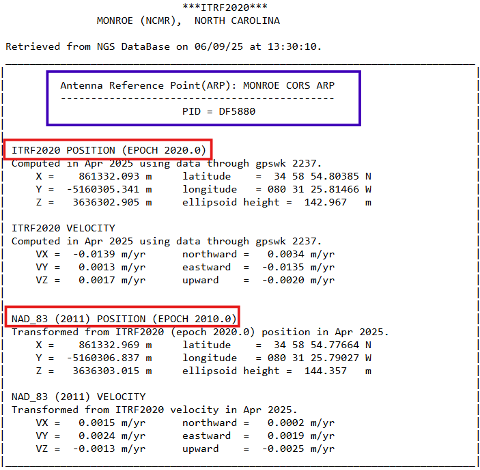
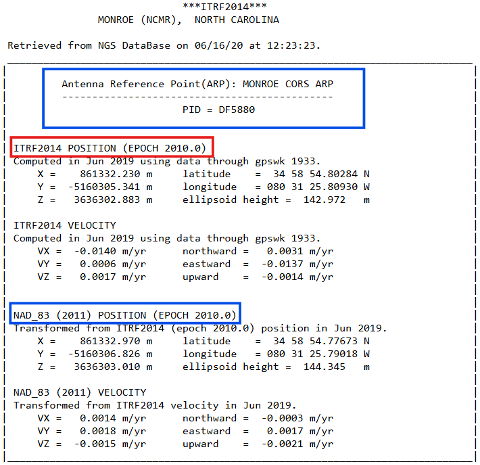
The image below provides the new and old CORS coordinates and velocity information for NOAA CORS Monroe (NCMR). These values can be obtained from NGS CORS website.
ITRF coordinates for NCMR. (Credit: NGS)
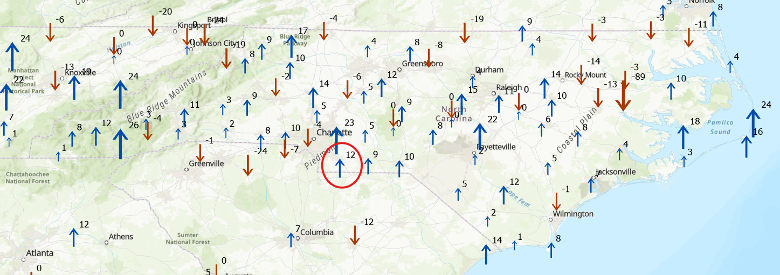
The difference between ellipsoid heights is straightforward. In the example, the difference is 144.357 meters minus 144.345 meters or 0.012 m. The image captioned “Change in Ellipsoid Height in NC based on ITRF 2020” provides the differences between MYCS3 and MYCS2 NAD83 2011, epoch 2010.0 published ellipsoid heights for the CORS in North Carolina. In other words, this is the change in the NAD 83 2011, epoch 2010.0 ellipsoid height at the CORS after updating to ITRF2020, epoch 2020. I’ve highlighted the NCMR CORS in the box. As you can see from the plot, there are several CORS in North Carolina that their ellipsoid heights have changed significantly; that is, greater than 20 mm and as large as -89 mm.
Change in Ellipsoid Height in NC based on ITRF 2020 (units in mm).
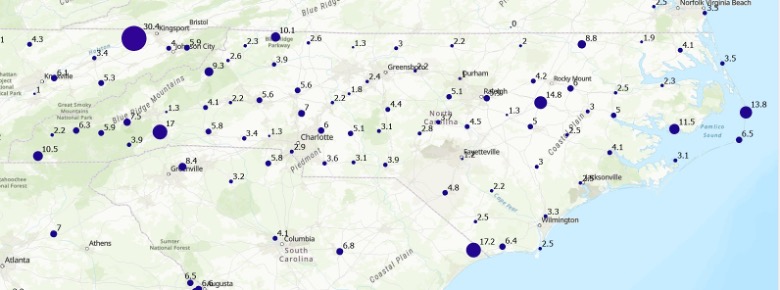
I don’t know about you, but I can’t determine the change in coordinates by looking at XYZ or Latitude/Longitude values. For the horizontal change I computed the differences in latitude and longitude and converted the results to millimeters. As indicated in the image above, the changes in the horizontal component are typically small; that is, less than a few mm. There are, however, a few larger changes such as the one at CORS TN1B (which is in Tennessee) that changed 30 mm.
Change in Horizontal Coordinates in NC based on ITRF 2020 (units mm).
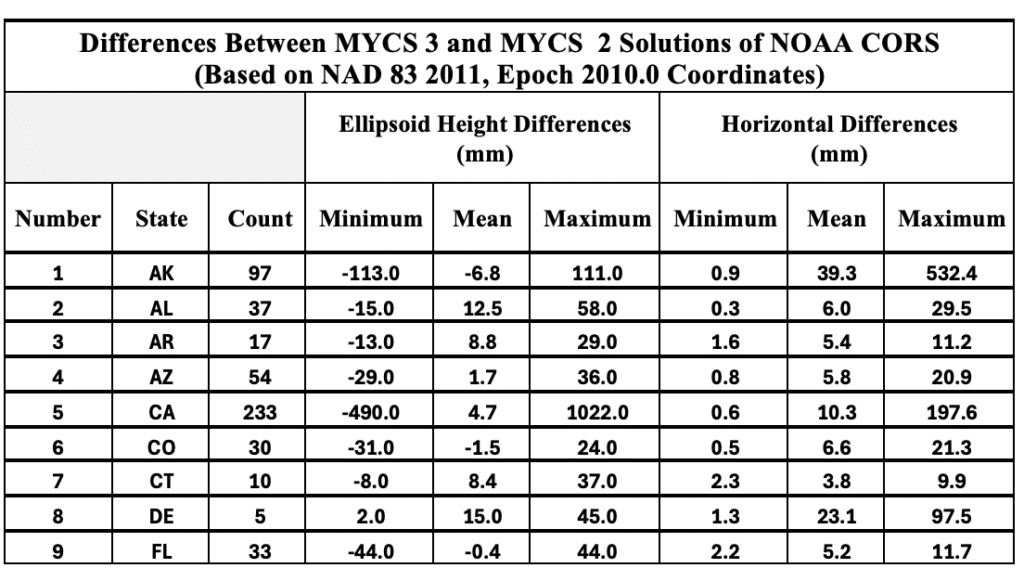
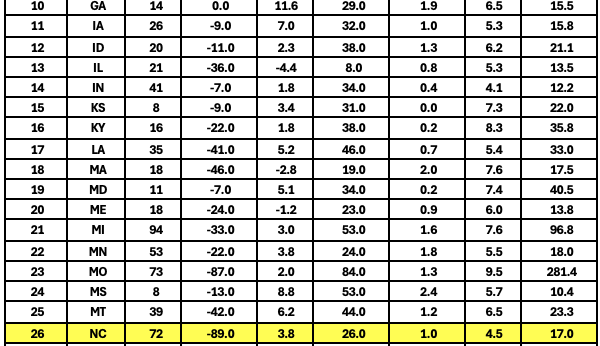
I suppose for all “practical purposes” the changes are small and shouldn’t impact most survey projects. Some of the larger changes are probably a good thing because that may mean that the CORS coordinates needed to be updated to account for movement or something else that affected the coordinates. I created a table that provides the minimum, mean, and maximum values in ellipsoid height and horizontal differences. See the table titled “Differences Between MYCS 3 and MYCS 2 Solutions of NOAA CORS.” I highlighted the State of North Carolina values.
So, why is it important to understand these differences? The NGS Online Positioning Users Service (OPUS) has begun processing data with NCN control that is consistent with ITRF2020 at the time of measurement. This means that if you compare old projects to new projects, you may find some small differences due to the change in CORS NAD 83 2011, epoch 2010.0 coordinates. As I previously mentioned, these differences are small and should not affect the results of most survey projects. Although, any difference can lead to someone questioning their results.
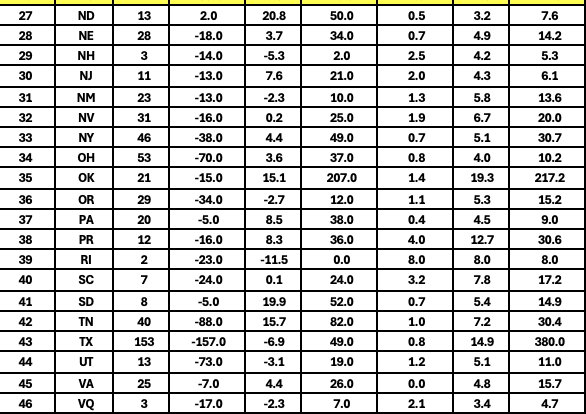
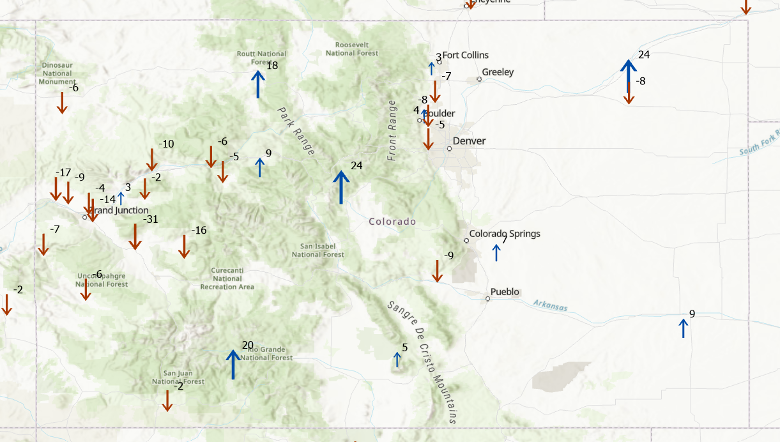
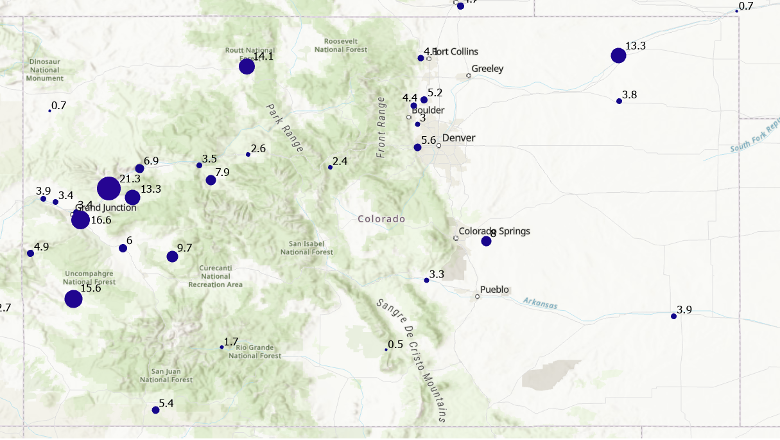
As another example of the changes, the two plots below in the image captioned, “Change in CORS coordinates in Colorado based on ITRF 2020” provides the differences between MYCS3 and MYCS2 NAD83 2011, epoch 2010.0 published coordinates for the CORS in Colorado.
Change in CORS coordinates in Colorado based on ITRF 2020 Ellipsoid Height Change (units in mm).Change in CORS Coordinates in Colorado based on ITRF 2020 Horizontal Change (units in mm).
Another difference that I computed using the results from the MYCS3 solution is an estimate of the changes between the current NSRS, that is NAD 83 2011 (epoch 2010.0) and new NSRS, for example NATRF2022, epoch 2020.0. This is only an estimate but provides a value that users can attain the magnitude of the changes in their local region. The image below depicts the approximate changes in horizontal and vertical components between the current NSRS (NAD 83 2011, epoch 2010.0) and the future NSRS (NATRF2022, epoch 2020.0) based on the CORS in the NCN. (Note that the units have changed to cm.)
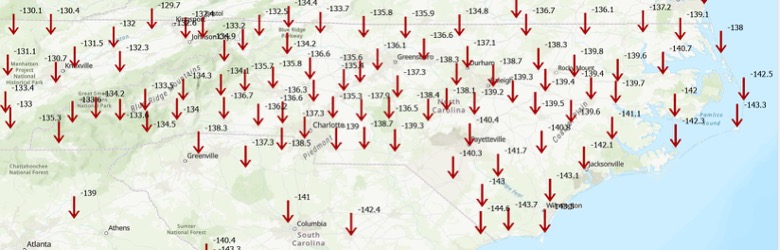
Differences between ITRF2020 and NAD 83 2011 in NC Horizontal Change (units in cm).Differences between ITRF2020 and NAD 83 2011 in NC Ellipsoid Height Change (units in cm).
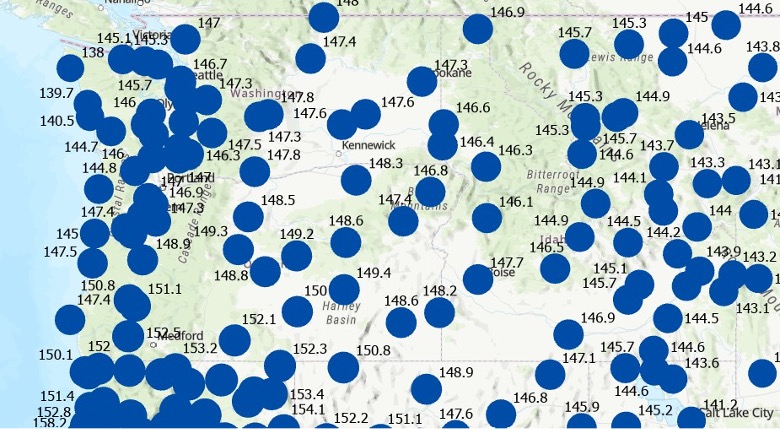
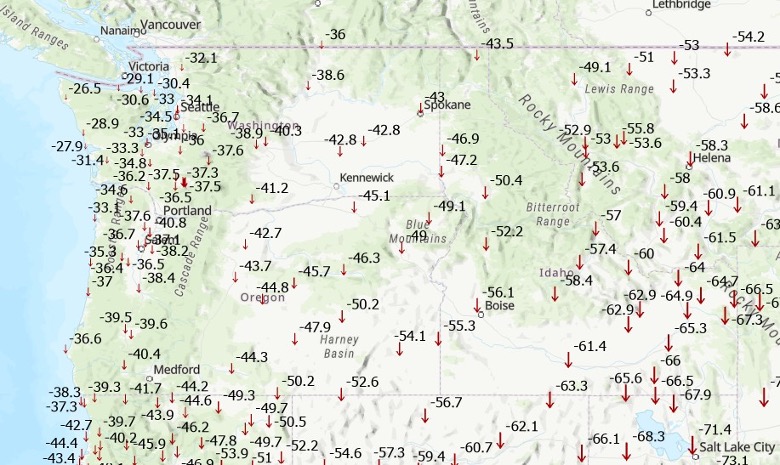
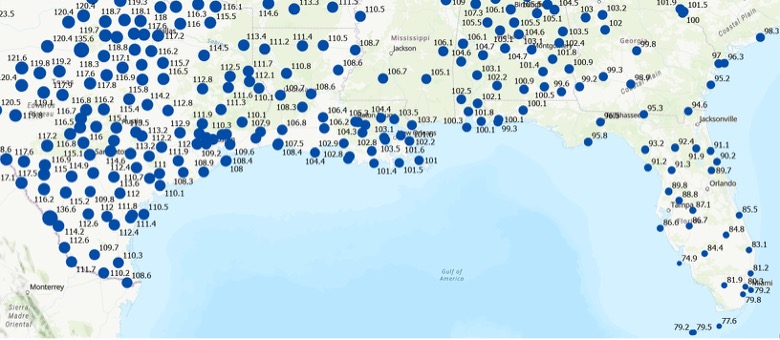
To demonstrate that these changes vary region by region, I prepared plots depicting the changes in the State of Washington and the U.S. Gulf Coast region. As indicated in the plots, the differences between the current NSRS and the new modernized NSRS will vary from state to state and are significantly different than the current NSRS coordinates.
Differences between ITRF2020 and NAD 83 2011 in Washington State Horizontal Change (units in cm).Differences between ITRF2020 and NAD 83 2011 in Washington State Ellipsoid Height Change (units in cm). Differences Between ITRF2020 and NAD 83 2011 in the Gulf Coast Region Horizontal Change (units in cm). Differences Between ITRF2020 and NAD 83 2011 in the Gulf Coast Region Ellipsoid Height Change (units in cm).
This newsletter underscored upcoming OPUS product changes that NGS will implement following adoption of the modernized NSRS, along with updates to CORS station coordinates resulting from the Multi‑Year CORS Solution 3 (MYCS3). It clarified what these changes mean for users of the U.S. NSRS. I also flagged several topics in the NGS News bulletins that warrant further attention, as they are critical for understanding how the modernized NSRS will impact geospatial products and services. The new NSRS offers a strategic opportunity for users to comprehensively review existing processes and workflows, reassess current products, and proactively plan for future requirements. By auditing geospatial data dependencies now, NSRS users can evaluate how transitioning to the new datum will impact workflows, datasets, and operational decision-making.
Will you be ready to implement the new NSRS after NGS officially adopts it? Will you have the appropriate tools available to implement the new NSRS? These are questions that everyone that uses the NSRS should be addressing now.
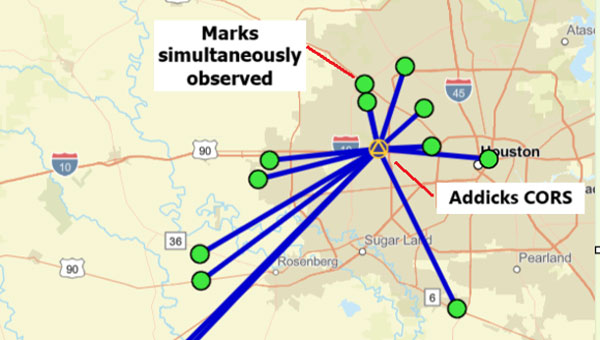
A “GNSS radial survey” is a surveying technique where a central control mark is established within an area, and vectors are measured from the central control mark to various other marks of interest surrounding the central control mark, essentially creating a “spoke-like” network design.
Plot of OPUS Projects network diagram. Hub is Addicks CORS, all marks are simultaneously observed during the session. (Photo: Dave Zilkoski)
Why not use a GNSS radial survey when establishing geodetic control networks?
Basically, you cannot directly calculate a “relative accuracy” between two marks if no observations are taken between them. That said, a direct measurement such as a GNSS vector allows error propagation between two marks. Therefore, using the “spoke-like” concept, you know the relative accuracy between the central control mark and a single mark at the end of a single spoke. Still, you don’t know the relative accuracy between marks on the different spokes.
Anyone who has used OPUS Projects or seen presentations on OPUS would think, based on the OPUS Project’s HUB processing strategy, that OPUS Projects was performing a radial survey.
When using OPUS Projects, NGS recommends that users select one CORS as a HUB while processing GNSS session data. In the example here, the Addicks CORS (ADKS) was used as the HUB in data processing. So, why is this not considered a radial survey? It may look like a GNSS radial survey but there’s a lot that goes on behind the scenes.
The bottom line is that OPUS Projects is denoted as a simultaneous (session) processor. This means the vector solution is computed from simultaneous processing of all independent vectors with mathematical correlations between all simultaneously observed vectors. OPUS Projects processing includes all independent vectors along with mathematical correlations to provide the relative connection to marks that are simultaneously observed. In the example above, when processed by OPUS Projects, all the marks occupied (indicated by the lines connecting to the Addicks CORS HUB) will have correlations computed between each other. These correlations are included in the data that is used in the least squares adjustments that are performed during the OPUS Projects workflow (NGS uses a file denoted as the gfile to document the correlations.)
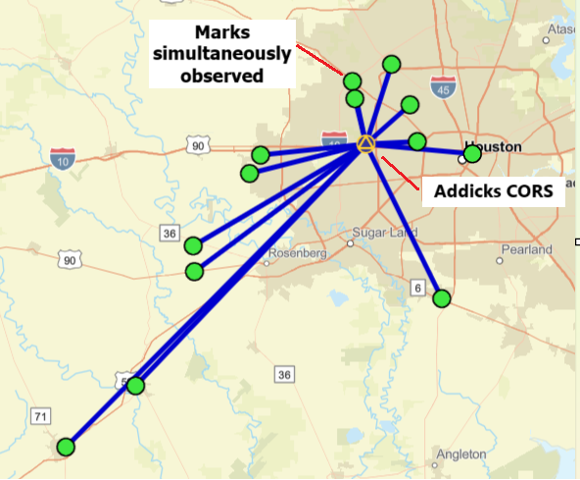
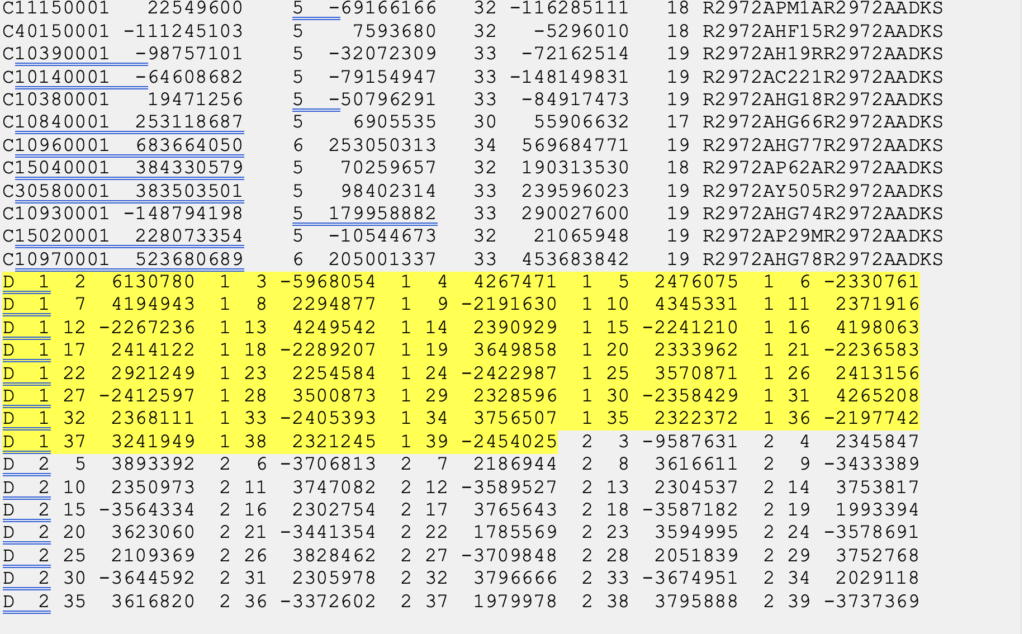
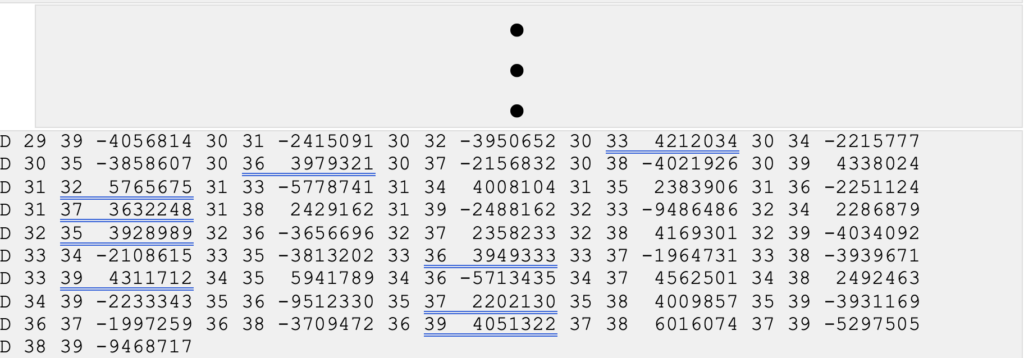
The image below provides a sample of mathematical correlations between marks simultaneously observed during the session. The gfile can be a large file when the survey includes a lot of simultaneously observed marks because there will be correlations between all marks. There were 13 marks simultaneously observed during the sample session, so the “spoke-like” diagram includes imaginary lines between every mark because of the mathematical correlations between these marks.
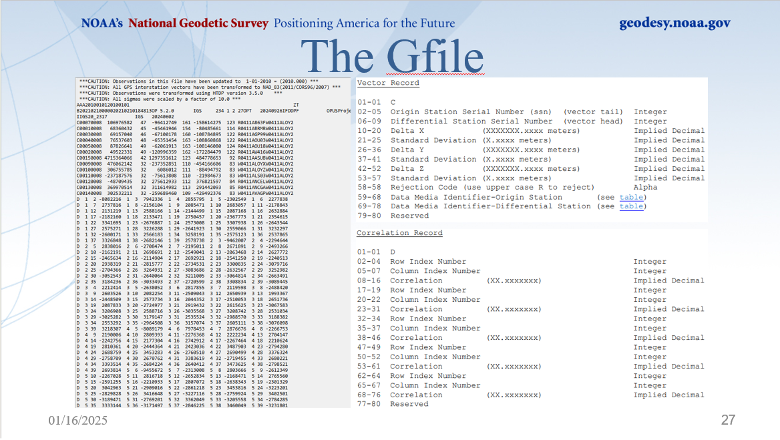
Excerpt from an output from simultaneous (session) processing. (Gfile contains baseline information with mathematical correlations.)
Dan’s presentation included a slide that described the file’s format. The file provides information on the vectors (delta X, delta Y, delta Z and their standard deviations) between the HUB and the individual marks, plus the mathematical correlations between all marks simultaneously observed during the session. I have highlighted a vector’s components and standard deviations and a set of mathematical correlations.
The image below, from Dan’s presentations, describes the format of NGS’s gfile.
Photo: NGS
Some software programs perform what is called sequential (baseline) processing, which involves processing one vector at a time and ignoring the mathematical correlation between baselines observed in the same session. So, what does this mean, and why is it important?
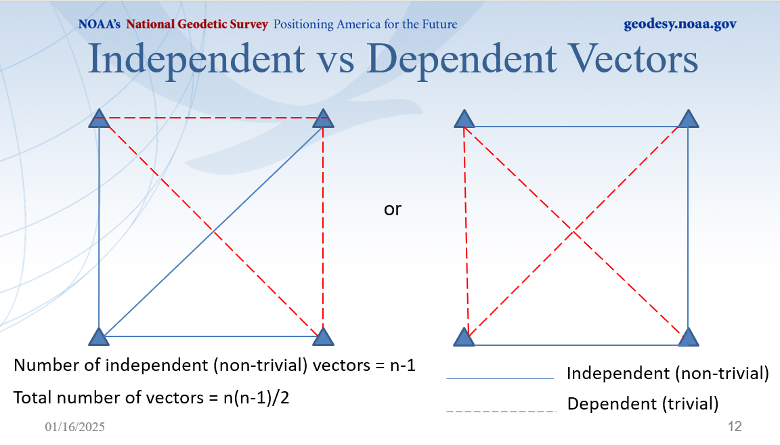
A couple of definitions are necessary to understand the concept. Independent baselines are baselines where no other baseline is a linear combination of another baseline. Linearly dependent (trivial) baselines are baselines that are linear combinations of another baseline. Basically, once you have used a particular set of data to compute a vector, you can’t use the same data to compute a different vector.
Dan did a nice job during his webinar explaining what baselines are considered trivial and what baselines are non-trivial. This is very important because if your software is a sequential (baseline) processor, you must ensure that trivial vectors are not included with the non-trivial vectors. As Dan highlights in his webinar, dependent vectors are not additional observations. But they do offer useful information if treated properly.
Photo: NGS
There was a 1992 study performed by Michael Craymer and Norm Beck, “Session Versus Baseline GPS Processing,” that explained the differences between sequential baseline processing and simultaneous (session) processing, and what the user needed to do to use sequential baseline processing. Basically, when all the trivial vectors are added to the adjustment, they are treated like additional independent observations, resulting in an inflating degree of freedom and overly optimistic error estimates. If all possible vectors are processed, then resulting coordinates may essentially be the same as in simultaneous (session) processing, but statistics will be overly optimistic and misleading. The 1992 paper does state that the two different processing techniques can produce the same results.
“It is shown that using all possible baseline solutions (with the covariance matrix scaled by n/2, where n is the number of simultaneously observing receivers) is mathematically equivalent to session processing with all correlations only under certain conditions. This equivalence is verified empirically using simulated and real data. However, the conditions under which this equivalence holds are difficult to achieve in practice.”
Users who process data using a sequential processor should read the 1992 study by Craymer and Beck to understand the conditions under which the two processes generate the same results.
I would encourage all individuals that process GNSS data, regardless of which software you use, to download the NGS OPUS User Forum webinar. NGS also has a website that provides training material on the use of OPUS Projects. The more you know about the software you use, the better you will be prepared to address issues associated with your survey results.
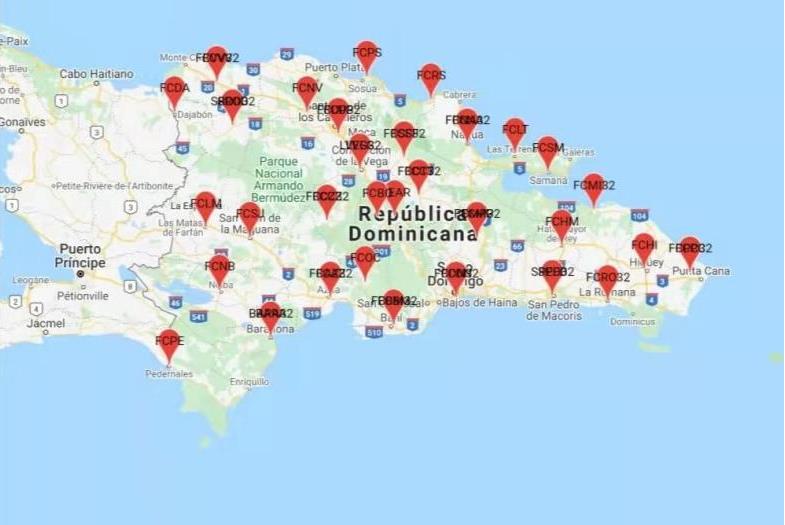
ComNav Technology has collaborated with FUNDCORSRD, a non-profit institution, to establish a comprehensive network of continuous reference stations (CORS) across the Dominican Republic for conducting topographic surveys.
As a result of this collaborative effort, there are now 32 CORS stations spread throughout the Dominican Republic that are fully implemented with the SinoGNSS CORS solution from ComNav.
ComNav Technology’s choice of equipment for this project included the M300 Pro GNSS receivers and AT600 choke ring antennas for the CORS reference stations.
The M300 Pro features robust satellite tracking capabilities, supporting multiple satellite constellations such as GPS, GLONASS, BeiDou, Galileo, SBAS, L-band, and QZSS. It also comes equipped with a built-in web server, interfaces for external devices, a user-friendly front panel display, optical fiber interface, and a secure TF-card with password protection.
The AT600 high-performance choke ring antenna features high gain, accuracy, and reliability, along with full-constellation compatibility.
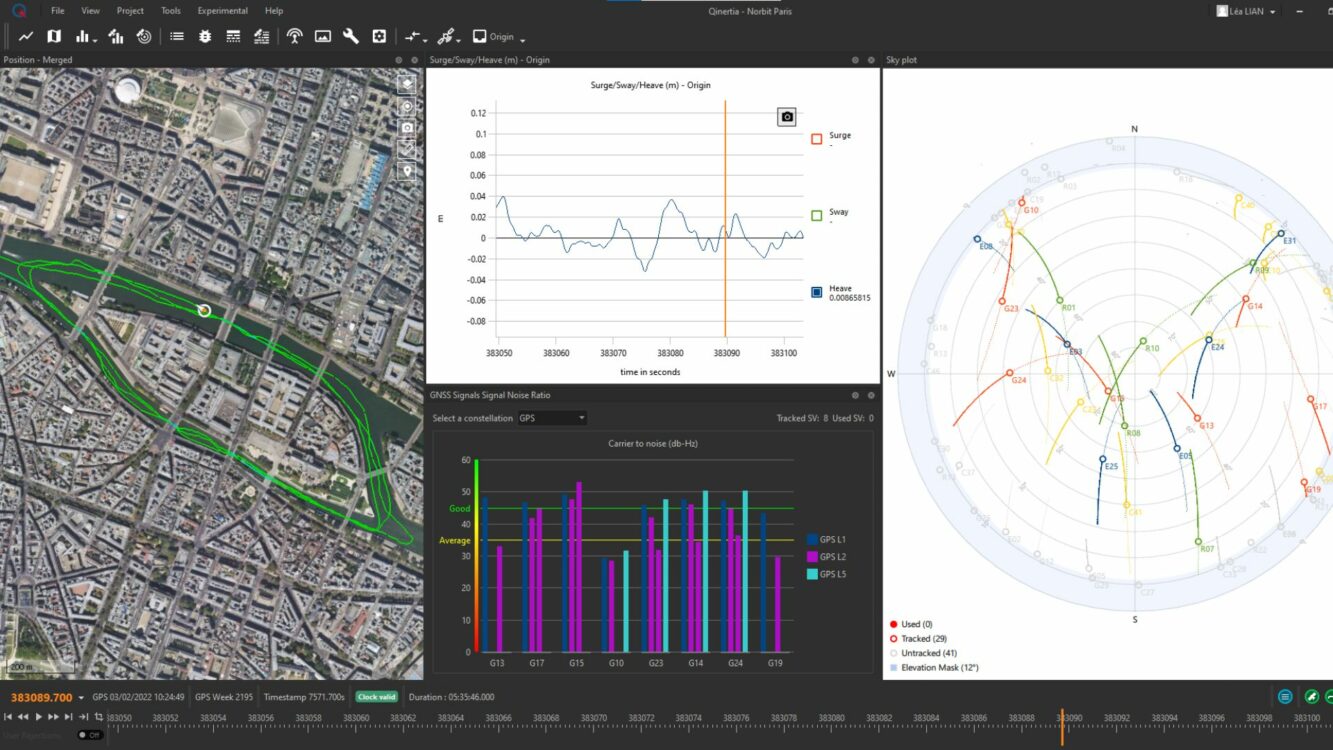
SBG Systems will release the newest version of its Qintertia technology, Qinertia 4, on November 7, 2023. This version introduces several innovative features that provide users with a complete solution for precise trajectory and motion analysis.
Qinertia is a post-processing software delivering better precision and reliability compared to RTK systems. Qinertia 4 has an enhanced Geodesy engine to boasts an extensive selection of preconfigured coordinate reference systems (CRS) and transformations, making it a versatile solution in applications that use diverse geodetic data, including land surveying, hydrography, airborne surveys, construction and more.
To tackle the challenges of variable ionospheric activity, the new technology uses Ionoshield PPK mode. This feature compensates for ionospheric conditions and baseline distances, allowing users to perform post-processing kinematics (PPK) even for long baselines or harsh ionospheric conditions.
Another addition to Qinertia 4 is extended continuously operating reference stations (CORS) network support. This feature offers users a vast network of 5000 SmartNet for reliable GNSS data processing.
Qinertia has more than 10,000 bases in 164 countries. This global coverage ensures that Qinertia remains a reliable and efficient solution, regardless of geographic location. In addition, users can import their own base station data and verify its position integrity with precise point positioning (PPP).
For data that cannot be processed using PPK, Qinertia 4 offers an alternative solution with its new tightly coupled PPP algorithm. This new processing mode, available for all users with active Qinertia maintenance, provides post-processing anywhere in the world without a base station, with a horizontal accuracy of 4cm and a vertical accuracy of 8cm.
Qinertia’s new functionalities will be demonstrated live at Intergeo 2023 in Berlin.
Last year I was privileged to be part of a Blue-Ribbon Review Panel for an American Society of Civil Engineers (ASCE) surveying publication. The book is Surveying and Geomatics Engineering: Principles, Technologies, and Applications. I recently received my copy of the published book in the mail and decided to highlight some sections. While preparing this column, the chapters reminded me of how geodesy has expanded into so many different disciplines.
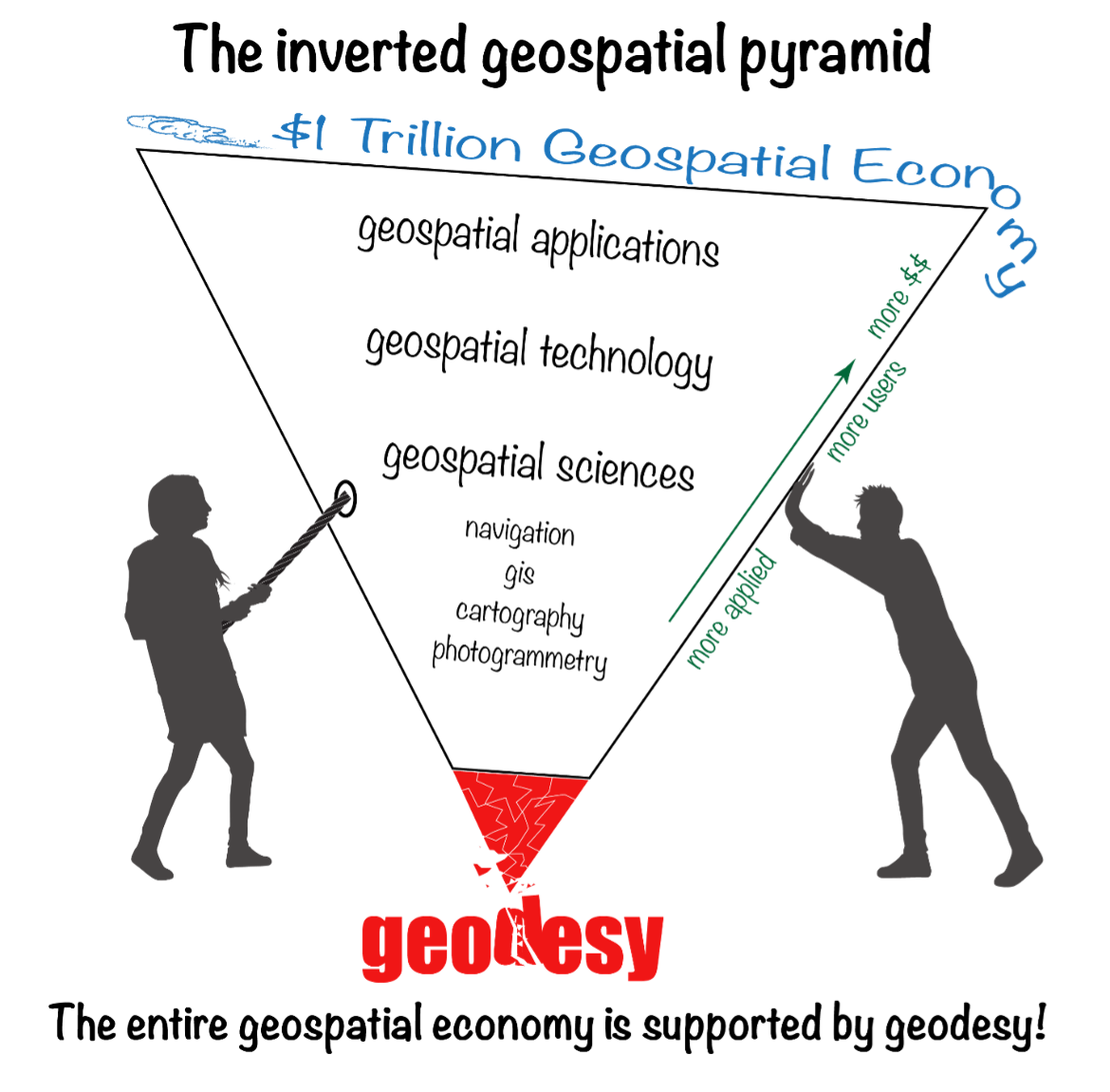
I first mentioned this in my July 2020 article for the “First Fix” column of GPS World, where I stated that the shortage of American trained geodesists poses a significant economic risk for the United States. In that column, I mentioned how geodetic science and technology now underpin many sciences, large areas of engineering (such as driverless vehicles and drones), navigation, precision agriculture, smart cities and location-based services. That is why I believe understanding geodesy is more critical today than ever. In January 2022, Mike Bevis, collaborating with others, prepared a white paper titled “The Geodesy Crisis,” documenting the concern about the lack of trained geodesists in the United States.
Image: Dana Caccamise II
“The inverted geospatial pyramid” graphic depicts how the entire $1 trillion geospatial economy is supported and dependent on geodesy, and how it’s close to collapsing without an increase of support for geodesy. A lack of geodetic expertise in the United States presents a significant challenge, with future impacts on positioning, navigation, mapping and dependent geospatial technologies.
In my opinion, without investment in geodesy, the United States will not have the available skills and knowledge to develop new geodetic technologies and improve models to address challenges to society, such as
how the Earth’s surface is changing as sea level rises and the Earth’s glaciers and ice sheets change on timescales of months
how the tectonic plates are deforming and what physical processes control earthquakes, and
the ability to monitor the temporal changes in Earth’s water reservoirs by measuring changes in Earth’s gravitational field as it responds to the moving water mass and the deformation of the solid Earth caused by moving water.
These challenges need a well-maintained, stable terrestrial reference frame (TRF) with sub-1 mm/year vertical accuracy. Errors in TRF heights can propagate systematically into estimates of atmospheric water vapor, sea level, satellite orbits and other parameters. An accurate TRF can lead to important observations and discoveries because it enables revelations from coherent global motions. (My previous column described the latest International Reference Frame of 2020 [ITRF2020].)
Geodesy has been a significant part of my life for 50 years. I’ve seen a lot, and unless we address the Geodesy Crisis, the innovations in geodetic science of the past will not continue in the future. At least not in the United States.
The Geodesy Crisis paper was mentioned in the Fall 2022 ION Quarterly Newsletter by Everett Hinkley (see the box below). Hinkley noted, “The geospatial community relies on geodesists, though few in the community are fully aware of this connection nor understand the importance of geodesy to their work.” I encourage everyone to download the white paper and the ION Quarterly Newsletter to understand the importance of the need for more trained geodesists.
Excerpt from Everett Hinkley’s Article
“In January 2022, a white paper entitled America’s loss of capacity and international competitiveness in geodesy, the economic and military implications, and some modes of corrective action was released (Bevis et al.). This collaborative paper paints an alarming picture of the dwindling pool of trained geodesists within the United States. The report highlights America’s loss of capacity and international competitiveness in geodesy and states: ‘The U.S. is on the verge of being permanently eclipsed in geodesy and the downstream geospatial technologies. This decline in capability threatens our national security and poses major risks to an economy strongly tied to the geospatial revolution, on Earth and, eventually, in space.’ Though the word crisis correctly describes the dire predicament well, it didn’t occur overnight. Due to several converging trends, the geodesy crisis has been decades in the making. A national lack of geodetic expertise presents a significant challenge with downstream impacts on positioning, navigation, mapping, and dependent geospatial technologies. The Department of Defense, intelligence community, and federal civil agencies’ mapping entities rely on accurate and precise maps for a broad range of purposes, and reliable maps depend on an accurate geodetic underpinning. The geospatial community relies on geodesists, though few in the community are fully aware of this connection nor understand the importance of geodesy to their work.” (Reproduced with permission from ION.)
In my “First Fix” column, I mentioned that I attended The Ohio State University (OSU) to obtain my graduate degree in Geodetic Science in 1979. Therefore, I admitted that I am a little biased — once a geodesist, always a geodesist. That said, in OSU’s geodesy heyday (1960–1990s), many Americans trained were sent there by federal agencies: National Geospatial-Intelligence Agency (NGA), NOAA/National Geodetic Survey (NGS), USGS, Army, Navy and Air Force. During the 1970s, NGS sent two employees back to school every year. These agencies needed geodesists because they were undertaking significant projects, such as the NGS projects to readjust the U.S. national horizontal (NAD83) and vertical geodetic (NAVD88) networks. I was one of the employees NGS sent to OSU to be trained to support the NAD83 and NAVD88.
Today, the environment is different. U.S. federal agencies still need geodesists to develop enhanced and refined geodetic models and tools. However, major U.S. companies, such as Google and FedEx, the automobile industry, the construction industry (automated machine guidance), precision farming companies and mining companies also need more accurate geodetic models, tools and algorithms. Therefore, these companies also need trained geodesists to perform essential research on topics that address their geodetic requirements. As indicated in “the inverted geospatial pyramid” graphic, the entire $1 trillion geospatial economy is supported by geodesy.
As implied in Hinkley’s article, geodesy has played a role in developing geospatial products but most users didn’t realize that it was their foundation. Since it’s been in the background, everyone assumes it will always be there. A participant at one of my workshops stated that “GPS has made geodesists out of all of us.” In my opinion, the advancements in GNSS equipment and processing software provided some users with a “false sense of knowledge or security” that they understood what was happening within the “black box.” One of my colleagues at NGS said that the new equipment and software programs were creating a field force of “buttonologists.”
These statements concerned me at the time and concern me today. With the last generation of trained geodesists either retired or getting ready to retire, we are at a critical stage of not being able to meet the geospatial needs of the future. As indicated in the white paper, there are significant challenges in rebuilding programs that support the training of geodesists.
Hinkley’s article summarized several action items that could help improve the lack of trained geodesists in the United States. I’ve provided his list in the box below. I’ve highlighted several items the surveying and mapping community can help achieve.
So how do we build and educate the next generation of geodesists?
Make the White House and Congress aware of this crisis, particularly its national security implications; seek direct support in the federal budget to correct this issue. It has become clear that, without engagement at the highest echelons of the U.S. government, averting this current crisis and its eventual outcome is unlikely.
Teach rigorous math in our public schools; follow the scholastic math approach used in many Asian and European countries.
Encourage creative thinking!
Actively market geodesy in high schools as a rewarding career for the math stars before college entry.
Build back, support and sponsor geodesy programs at select universities. This support needs to be strategic, with backing from the highest levels of the U.S. government.
Break our cultural trend of reactions to crises and seize the opportunity to be proactive and prevent the foreseen consequences of this crisis.
Encourage U.S. government support in the form of grants, professional development of staff, and research collaborations/affiliations. There are early efforts underway to bring new talent into the pipeline:
the National Geospatial-Intelligence Agency (NGA) is forming an emerging scientist consortium (ESCON) with partnerships that exist with Ohio State, UT-Austin, and other industry/academic/government partners
a pilot Ph.D. geodesy educational program with three NGA and one NGS employee is in place; the NGA expects to continue growing this program.
the NGA’s new western headquarters in St. Louis will bring 350 companies and organizations into the regional GEOINT ecosystem.
If we answer this call to action collectively, there is hope that a new cadre of U.S. geodesists can be cultivated before it’s too late to recover.
(Reproduced with permission from ION.)
With all that said about the need for more geodesists, one thing that this ASCE publication may do is make some readers realize how much they don’t know about the roots of the technology that they’re using to create geospatial products and services. This knowledge gap is not just correctly using GNSS and other geospatial technology to perform a survey, but also integrating various instruments to create an accurate mapping system, such as mobile mapping and terrestrial laser systems. My intent is not to criticize the expertise or knowledge of anyone, and I only mean to point out that in today’s use of computers and programs, many technical concepts are hidden in “black boxes.” I learned many things about some topics by reviewing this book.
The book is 556 pages and has 15 chapters. As part of my responsibilities as a Blue-Ribbon Panel member, I read every word in the book, and not many people will read the entire book. Still, I would encourage surveyors, engineers, geodesists, photogrammetrists and GIS and remote-sensing practitioners to obtain a copy of the book for reference and to understand the limitations of geospatial technology.
Now to the book’s content. I want to highlight that the forward is written by Juliana Blackwell, director of the National Geodetic Survey (NGS). She states that “A common thread running through the manual is the importance of the National Spatial Reference System (NSRS) to modern geospatial applications.”
Most of my columns highlight something relevant to the NSRS. That’s because the NSRS is the foundation layer for United States federal geospatial products, and geodesy provides the foundation for all geospatial products and services as indicated in the “The inverted geospatial pyramid” figure.
I would also like to highlight a statement by Gene Roe in the preface. He states, “Because entire books could be devoted to each of these topics, this manual only provides a summary, and it points the readers to important references where they can find more details. The manual is meant to provide a comprehensive but general overview to help support education and inform practicing engineers on the important role of the surveying engineer. It is too important for this not to occur.”
I agree with Roe’s statement that the book is important for surveying engineers. Still, I would add that this book is important to anyone working with GNSS and other geospatial data, especially geodesists, surveyors and GIS practitioners.
This publication is edited by three individuals that are licensed surveyors; two of them are geodesists who work for NGS. These individuals have performed a fantastic job of ensuring that all chapters have been reviewed for correctness and that the information provided is current and essential for users of geospatial data.
Readers can download copies of the book and specific chapters here. You can buy it as an e-book or in print. The “Abstract” box summarizes the book from the ASCE Library website.
Abstract
Sponsored by the Surveying Committee of the Surveying and Geomatics Division of the Utility Engineering and Surveying Institute of ASCE and the National Geodetic Survey of the US National Oceanic and Atmospheric Administration
Surveying and Geomatics Engineering: Principles, Technologies, and Applications, MOP 152, is a comprehensive yet general overview to help support education and inform practicing engineers on the important role of the surveying engineer. It provides a much-needed update on the modern practice of surveying and geomatics engineering.
Topics include:
• geodesy
• coordinate systems and transformations
• least squares adjustments and error propagation
• modern surveying and remote sensing technology
• analysis and establishment of control
• geographic and building information systems
• construction surveying, and
• best practices.
MOP 152 can be used as a summary and a reference for practicing engineers, surveying and otherwise, to help provide a solid understanding of the state of the surveying and geomatics engineering field.
Below is a list of the chapters and their authors. This column cannot highlight everything important in this book, but I will select a few items to which I believe users of geospatial data should pay attention.
Chapter Titles
Chapter Number
Chapter Title
Author(s)
Forward
Juliana P. Blackwell
Preface
Gene V. Roe
Acknowledgments
Daniel T. Gillins
1
Engineering Surveying Within ASCE
Gene V. Roe
2
Geodesy and Geodetic Computations
Earl F. Burkholder
3
Map Projections and Local Coordinates Systems
Michael L. Dennis
4
Local, Regional, and Global Coordinates Transformations
Michael L. Dennis
5
Analysis and Adjustment of Observational Errors
Charles D. Ghilani
6
Satellite-Based Surveying Technology
Jan Van Sickle
7
Leveling and Total Stations
N.W.J. Hazelton
8
Terrestrial Laser Scanning
Michael J. Olsen
9
Mobile Terrestrial Laser Scanning and Mapping
Michael j. Olsen, Jaehoon Jung, Erzhuo Che, Chris Parrish
10
Aerial Surveying Technology
Michael J. Starek, Benjamin E. Wilkinson
11
Survey Control
Daniel T. Gillins
12
Construction Surveys
Marlee A. Walton
13
Survey Records
Andrew C. Kellie
14
Information Systems in Civil Engineering
Yelda Turkan, Dimitrios Bolkas, Jaehoon Jung, Matthew S. O’banion, Michael Bunn
15
Professional Services and Design Professionals Agreements
David E. Woolley, Lisa D. Herzog
As a geodesist, I usually focus on topics relevant to geodetic science. This book has a lot of topics that use geodesy concepts to create an engineering product or service. For example, chapter 2, “Geodesy and Geodetic Computation” by Earl Burkholder, provides a good summary of geodetic concepts that anyone using or generating geospatial products should know and understand. It gives basic equations without lengthy derivations of how they were developed.
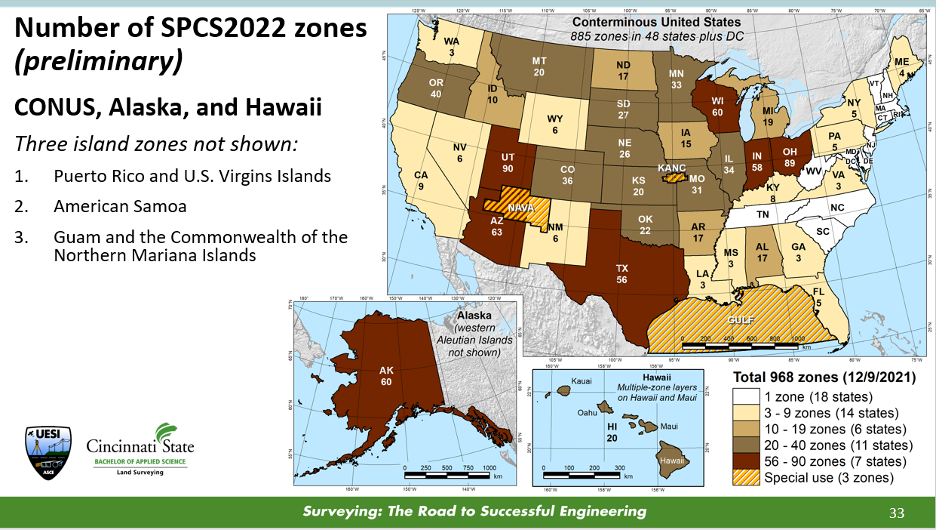
In my opinion, chapter 3, “Map Projections and Local Coordinates Systems” by Michael Dennis, does the best job of explaining the concepts of map projections that are relevant to the surveying and mapping community. Many GIS practitioners use map projections in their software but don’t have a working knowledge of what’s happening to their original data. This chapter describes the current United States State Plane Coordinate System of 1983 (SPCS83) and the future State Plane Coordinate System of 2022 (SPCS2022) that is scheduled to be adopted in 2025. Dennis uses figures and diagrams to describe map projections, angular and linear distortion, and methods for reducing map projection distortion to make it easier for readers to understand the concepts. One section of interest to many surveyors after SPCS2022 is adopted is the Low-Distortion Projection (LDP) Coordinate Systems section. This is useful because, in SPCS2022, many states have designed LDP systems for their state’s SPCS2022. The box below provides a diagram with the number of zones for each state.
Image: NGS Presentations Webpage “Grids for the Future: A New Approach for Designing State Plane Coordinate System Zones” by Michael Dennis.
One purpose of an LDP is to reduce linear distortion; it is not a new concept. Many surveyors have performed a simplified form of it for decades. It’s known by many as a “modified” or “scaled” State Plane. The American Congress on Surveying and Mapping (ACSM) taught a workshop for decades describing how to compute a “modified” State Plane Coordinate. I was an instructor of this class in the 1980s and 1990s. “Modified” State Plane Coordinates had several issues, but they worked reasonably well in small areal extents. Today, with the advancements in computers and computer software, there are better ways to accomplish an LDP. Dennis’ section does a great job explaining the new SPCS2022 and the design of LDPs in the SPCS2022. The use-case examples provide a simplified description of understanding the linear distortion behavior in an area.
Chapter 4, “Local, Regional, and Global Coordinate Transformation” by Michael Dennis, is one that every surveyor and GIS practitioner should read. Dennis highlighted the differences between “equation-based” transformations and “grid-based” transformations, as well as combined equation-based transformations with grid-based transformations. Understanding the information provided in chapter 4 will be important when NGS replaces the NAD 83 (2011) and NAVD 88 datums with the new, modernized NSRS in 2025. NGS will provide models and tools for users to perform coordinate transformations, but hopefully, some users will want to understand what’s happening behind the scenes.
Chapters 8 and 9 discuss laser scanning systems. In chapter 8, “Terrestrial Laser Scanning,” the “Data Quality Considerations” section highlights common artifacts or limitations encountered with terrestrial lidar system data. The authors provide many examples of these artifacts, making the concept easy to understand. At the end of this chapter, there are 14 pages of references that will be very helpful to users involved with terrestrial laser scanning systems.
Chapter 9, “Mobile Terrestrial Laser Scanning and Mapping,” is very informative, especially the section on georeferencing. This section is not just the description of properly using GNSS to perform a survey, but also the integration of various instruments to create an accurate mobile mapping system. I like how the authors discussed the error sources in georeferencing the system, listed the source, and provided an explanation of the error.
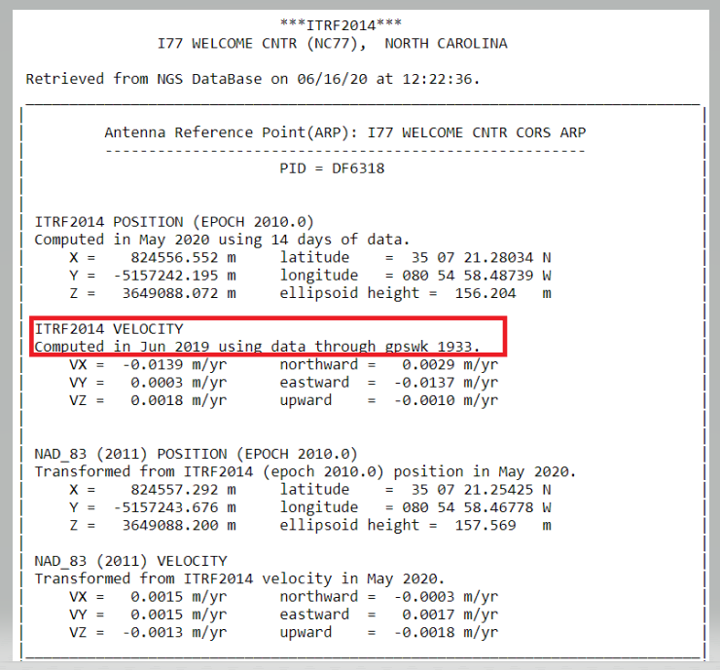
Anyone performing a GNSS survey project that meets NGS’s requirements needs to read chapter 11. I like the section describing how users should evaluate CORSs before using them as control. Evaluating CORS is something all users should do before using any CORS in their project, because not all CORS are created equal. See the excerpt from chapter 11 below for the recommended steps from the author.
Excerpt from Chapter 11 – Steps for Evaluation of CORS
The author recommends the following steps:
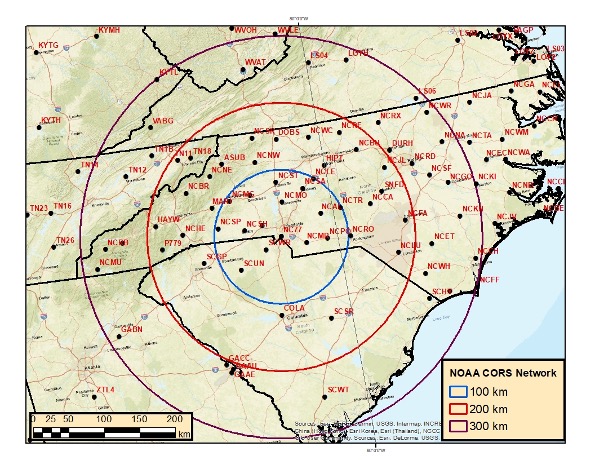
1. Choose stations that are within 100-300 km of a project site. It is well known that errors in GNSS baseline processing are directly correlated with baseline length (Chapter 6). Tropospheric delay is reduced when baselines are shorter and atmospheric conditions at each end of the line are similar. In addition, mutual satellite visibility at each end of the line for differencing diminishes as baselines grow longer. That said, errors in GNSS processing are more occupation time-dependent than baseline length-dependent (Eckl et al. 2001). Therefore, for short GNSS sessions (i.e., < 2 hours), choose CORS within approximately 100 km as control; for moderate GNSS sessions (i.e., 2 to 8 h), choose CORS within approximately 300 km. Note that even longer baselines can be successfully processed when GNSS sessions are very long in duration (e.g., up to 2,000 km for 24 h sessions).
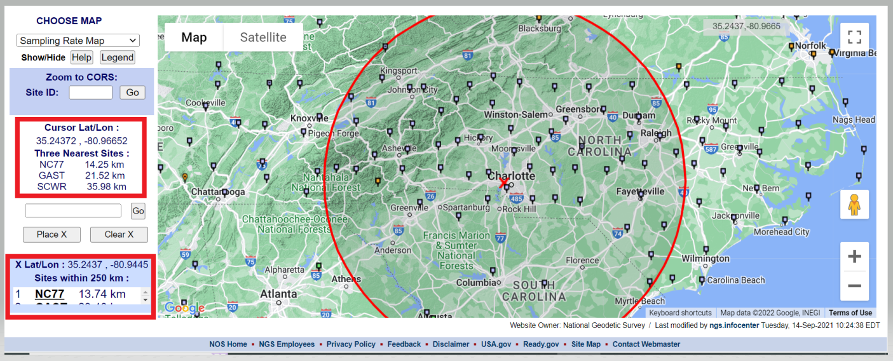
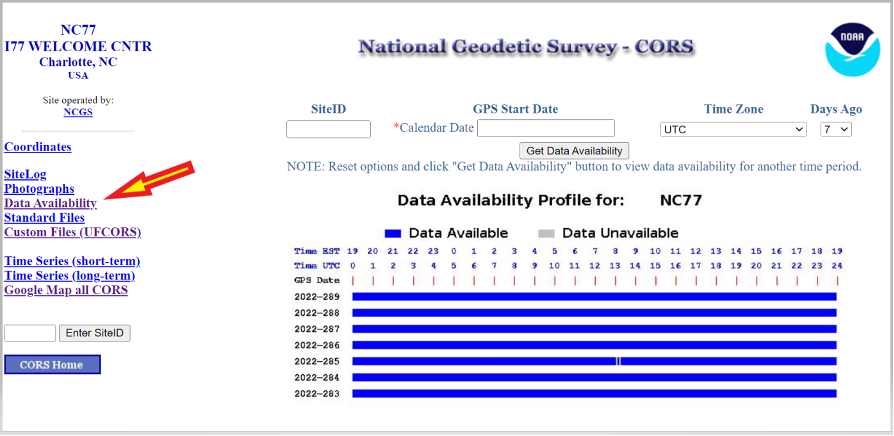
2. Determine if GNSS data are available at a given CORS during the time of your survey. Of course, if data are unavailable, then the station simply cannot be used as control. NGS provides a tool known as “User Friendly CORS (UFCORS)” for entering a date and time range to view available data at a given station (NGS 2021c). This tool can also be used to download the raw GNSS data for processing and adding a station to the survey network.
3. As discussed previously and when possible, choose a CORS with computed velocities rather than modeled velocities from HTDP. NGS provides tables of official coordinates with “computed” versus “htdp” coordinates and velocities on the website for CORS.
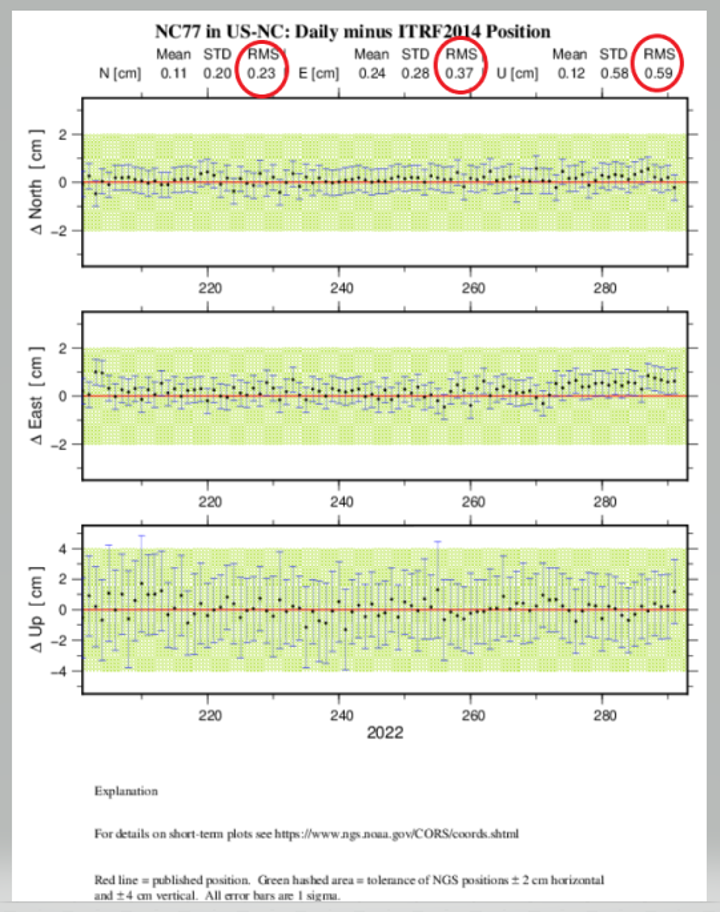
4. Review the aforementioned short-term time-series plot for the station, ideally at the time of the project. Stations with large spikes, data gaps, bias from the published “red” line, or large standard deviations should be avoided. A good rule-of-thumb is for the RMS in the short-term time-series plot (Figure 11-2) to be less than 1.0 cm in north and east and 2.0 cm in the up direction in a local geodetic horizon frame at the station.
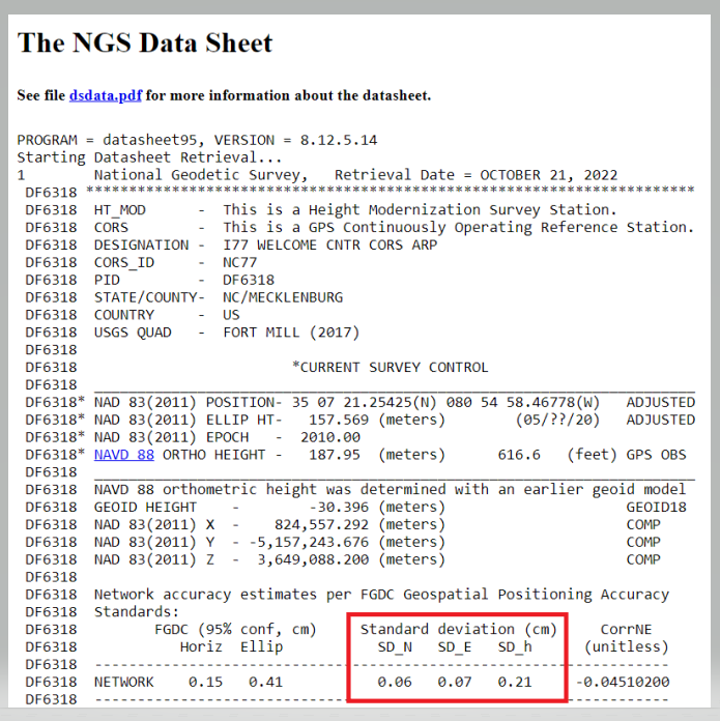
5. Examine the formal uncertainties for the official coordinates of the CORS. Standard deviations in north, east, and up are provided on the station’s datasheet, accessible from the webpage for the CORS (more on datasheets are discussed in the following under Passive Control). Stations with unusually large standard deviations (> 3 cm) should be avoided. Note that standard deviations are not available for CORSs with modeled velocities.
I believe that the evaluation of NOAA CORS is critical, so I’ve described Dan Gillins’ “Steps for Evaluation of CORS” below. First, users can access the NOAA CORS using the NGS CORS Map utility. After the map appears, users can move the cursor over the center of the project area, where it provides the location of the cursor and the three closest CORS. Users can click on a CORS icon and get coordinates and other information about the CORS. Also, they can place an X on the map, and the utility will draw a 250-km circle around the point. The box in the lower left-hand side of the map provides a list of the sites within 250 km of the marked location.
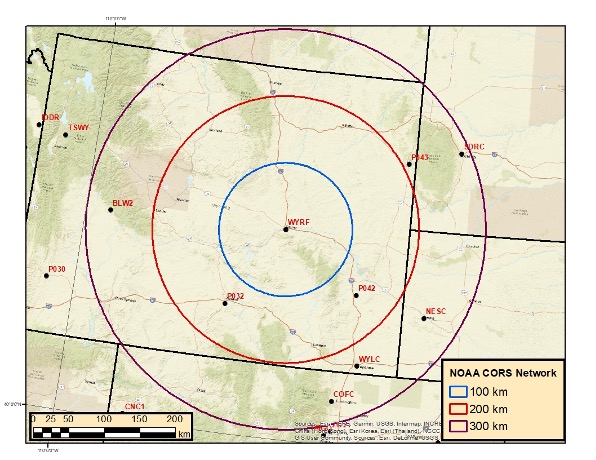
Users can download the NOAA CORS coordinates and velocities (computed and modeled). I downloaded the files and plotted three circles (with radii of 100, 200, and 300 km) around CORS NC77 in Charlotte, North Carolina. I only plotted CORS that are operational and have computed velocities. North Carolina has a lot of CORS to select from. In contrast, I’ve plotted three circles (also with radii of 100, 200 and 300 km) around CORS WYRF in Casper, Wyoming.
Buffer Zones around Charlotte, NC
Image: Dave Zilkoski
The plot depicting the buffer zones around Casper indicates that there are no CORS within the 100-km circle and only a few between 100 and 200 km.
Buffer Zones around Casper
Image: Dave Zilkoski
The data availability of the CORS site can be obtained by clicking on the CORS icon, selecting “Get Site Information,” and then selecting “Data Availability.”
There are too many chapters to describe each one, but I encourage users to check each chapter’s abstract on the ASCE website and decide which ones would be the most beneficial to them (see the box titled “Abstract for Chapter 11 Survey Control”). The manual provides numerous references and can serve as a helpful resource for finding further details on the fields of geodesy and surveying.
A goal of mine is for some readers of this column to obtain enough knowledge to “whet their appetite” and encourage them to pursue an education in geodesy and surveying. Others who are influential in federal government programs and those responsible for geospatial research for industries will recognize the need for more trained geodesists in the United States and help by doing the following:
actively market geodesy in high schools as a rewarding career for the math stars before college entry
build back, support, and sponsor geodesy programs at select universities; this support needs to be strategic with backing from the highest levels of the U.S. government
encourage U.S. government support in the form of grants, professional development of staff, and research collaborations/affiliations.
Advances in GNSS technology constantly expand the range of projects that benefit from them.
ComNav Technology
A telecom company adopted its CORS station to build China’s national CORS service for public companies. It is increasingly used for field robotics, including the development of self-driving cars.
Leica Geosystems
Bernhard Richter, vice president of Geomatics, Leica Geosystems AG, pointed to one of the biggest infrastructure projects in Europe, which aims to connect London to Birmingham, Manchester and Leeds with a high-speed railway system, avoiding the need to fly between those cities. This will have great environmental benefits because high-speed trains are much more efficient than planes.
However, high-speed rail requires tremendous precision. “First comes the prep work, moving dirt,” said Richter. “Then you must install the railroad ties with tenths of a millimeter precision relative to each other to avoid side accelerations. For a surveyor, it really has everything in one project. You need to constantly work with civil engineers. You then try to build as much as possible with machine-control-guided systems to make the leveling as automated as possible.” The project will include building bridges over whole valleys and monitoring them, particularly during the construction phase, to ensure that they are not moving.
“Even the factory they are building is huge, so just to build the factory you need a lot of surveying,” Richter said. The project is generating 25,000 jobs at 300 construction sites, all of which must be managed on very tight schedules. In this context, the quality of the survey gear is critical. “On a construction site, the surveyor should be an invisible person,” Richter said. “When they come with the big machines and want to get stuff done, they don’t want a surveyor on the site. So, he has to work off hours, then remain on alert and trust that what comes out of an instrument is correct.” Leica Geosystems is one of the main suppliers for this project. “They chose us because of our focus on reliability, trust and quality.”
Trimble
Software is increasingly driving sales, pointed out Boris Skopljak, vice president, Surveying & Mapping Strategy and Product Marketing at Trimble Inc. As an example, he cited Trimble’s SX12 scanning total station, which uses Trimble Access software to leverage scanning, imaging and traditional total station capabilities in the field. “We have provided more inspection tools to enable people to decide whether something is meeting the tolerance.” The Trimble Connect cloud-based collaboration platform, coupled with the continuous field and office connectivity, has driven productivity increases and moved customers toward choosing the company’s solutions, he said.
As an example of Trimble solutions, Skopljak cited City Rail Link, New Zealand’s first underground rail network and the largest transportation infrastructure project ever undertaken there. “The Trimble R10 was integral to acquiring static observations above the work site, while the Trimble S9, DiNi and Trimble Business Center network adjustment were game changers for the survey control network,” he said. To expedite mine tunneling the surveyors used the SX12’s combined total station and scanning functionality with Trimble Access field software infield inspection tools. “Fewer customers are choosing solutions on a spec. It’s not about how many satellites you can track, for how many days, or how many points you can scan. They are choosing solutions based on the ecosystem and productivity.”
High-resolution imagery geolocated by the sixth-generation Digital Sensor System (DSS) after Hurricane Ida. (Photo: NOAA)
Applanix, a division of Trimble, has been working with the National Oceanographic and Atmospheric Administration (NOAA) since the early 2000s to develop their response for emergency and coastal mapping activities. We discussed this collaboration with Joe Hutton, the company’s director of inertial technology, land and airborne products.
How has Applanix collaborated with NOAA regarding emergency response and coastal mapping?
Early on, we worked with them to develop a solution that allowed them to get out in the field and produce high accuracy map products with minimal touching of the data. In mid-2021, we delivered the next generation of this solution, or the DSS version six, which represents the culmination of everything learned over the years about how to produce imagery for emergency response, in terms of the types of collection, the types of imagery, and how to get it into first responders’ hands as quickly as possible.
At the heart of the system is our direct georeferencing technology. It’s a solution that allows us to assign the geographic location of every pixel of the digital imagery collected in the air. As soon as you land, you have the coordinates of every pixel, which means that you have a map that NOAA then pushes to the cloud for first responders to use in their emergency response efforts.
The collaboration consisted of Applanix working with Lead’Air to manufacture the next generation system that meets NOAA’s latest requirements. That’s what we delivered in 2021. Weeks after delivery, NOAA was called to respond to the hurricanes. They flew the new system with great success and were able to use it for their response.
What is your perspective on ground control points (GCPs) vs. direct georeferencing?
It is impossible to place GCPs in an emergency response when you cannot get on the ground. People who say they need GCPs do not really understand direct georeferencing. We’re having this debate even after 20 years of proving this technology. The NOAA system does not use GCPs and the map products are at centimeter level accuracy.
We use Trimble’s RTX technology, which enables centimeter-level GNSS positioning without base stations, which is important when the CORS or local RTN is unreliable due to a disaster. We have high accuracy inertial systems that get us the high accuracy orientation, so that we can go directly to ortho photos and ortho mosaics without running any triangulation or using GCPs in that process. That is a standard process these days. GCPs are only there for quality control if you want to deliver a final map product.
Did NOAA fly the mission with its own aircraft?
Yes, these are NOAA’s King Air or Twin Otter aircraft. The King Air aircraft is specifically outfitted for these types of emergency response and coastal mapping activities. The DSS system gets installed into the airplane and gets calibrated in terms of checking the system out for accuracy. Then it’s ready to fly the response. In the air, they collect the imagery over a flight path of interest to them. Then, it’s developed from raw imagery into JPEGs in the aircraft, and all the georeferencing data is logged with that imagery so that as soon as they land they can push a button and start to reference the JPEG imagery and push it to the cloud.
What are the components of your system?
What makes this system so unique is that it encompasses all the lessons learned over the years in terms of what NOAA needs to optimize for both their coastal mapping and their emergency response. It incorporates two pairs of color and near-infrared Phase One cameras that are configured in an oblique format with some overlap, forming a bowtie footprint on the ground.
You have 100% overlap of the color with the near-infrared and it’s on a high-performance stabilized mount that keeps everything perfectly level. The mount also has a special feature that enables the operators to rotate the cameras to go into nadir mode, mostly for traditional coastal mapping that requires stereo imagery. We were able to incorporate into a single system the requirements for both emergency response—where you want large coverage and obliqueness to look for damage—and nadir for coastal mapping.
Lead’Air built the sensor for you, on your specs, correct?
Yes, that’s correct. We’ve worked with Lead’Air for probably 20 years on flight management system (FMS) technology. They also have an amazing capability to build stabilized mounts and hardware systems. So, we decided to work together. We contracted them to implement some of their innovative hardware in this new design for us to deliver to NOAA. We contracted them to do all the manufacturing of the design and delivery to NOAA.
One of the quite innovative things that they did was to develop a new flight management capability that allows NOAA to fly ad hoc along highways or rivers, looking for damage. Traditionally, for aerial imagery you have to pre-flight plan trajectories. They designed an FMS that enables a pilot to fly a road or a river looking for damage without worrying about traditional block collections as with a more traditional FMS. So that feature further increases productivity. If you look at the most recent imagery at www.storms.ngs.noaa.gov you will see that it looks like spaghetti, not like blocks. That’s because they are following the roads and the rivers looking for specific damage.
Does the post-processing use your software?
Yes, it uses the POSPac MMS post processing software with POSPac Trimble Post-processed CenterPoint RTX correction service, allowing us to get that centimeter-level position accuracy, anywhere in the world with just an internet connection. You don’t have to worry about having a local base station—which, of course, if you’re in an emergency response situation, might not be there anyway. So, this is a very powerful way of getting global centimeter-level accuracy in real time, without having to worry about the ground-based GNSS infrastructure, that is, the local real-time network, that’s on the ground.
If you don’t have internet access, you can ship that data to the nearest place that does, right?
You could, however NOAA simply flies to wherever there is access. What takes the longest is to develop the imagery from the raw format to the JPEG format, because these are such large images. Doing that in the air saves an enormous amount of time. You have these JPEG-ready images that are compressed and can go right into the georeferencing process and make it really, really fast.
That’s a matter of computing power and smart software. What else did Lead’Air contribute?
This very efficient, fast image development process in the aircraft.
It sounds like it was a very integrated process between Applanix and Lead’Air. So, NOAA had the instrument mounted on their aircraft, their pilots did the flying, and then you processed the data?
No, NOAA’s team processes all the data. We just deliver the hardware and the software. They created the workflow software to push the data to their cloud environment.
NOAA uses this data to produce maps of the damage and highlight different situations and hazards?
Yeah. When these hurricanes go through, the first questions people have are “Where’s the damage? Are these roads passable? Did my house survive?” If you are doing response, you need to get teams in there. First, however, you need to know whether the roads are passable, so that you will not waste time going down a road that is not. So, the first thing they do is go up in the air and survey the main roads to push the imagery back, so that people can assess whether the roads are passable. Then they start to look for specific areas of damaged infrastructure, to triage where to put their resources. Then they ask “How do we manage disaster recovery?”
What lessons did you learn?
We are still learning about the power of the system, because these are Phase One 150 megapixel color cameras. It is such a powerful combination of sensors that they’re starting to look at different information they can get out of these things. They’re still learning new lessons in terms of what information can be useful for both the emergency response and the coastal mapping.
Ultimately, we’ll go to full ortho maps in the aircraft. That’s just going to be a matter of computational power. The holy grail would be to produce an orthophoto in the aircraft and radio it down to the ground in real time. Nothing prevents you from doing that now other than computational power and bandwidth. It’s not practical yet, but it will probably get there.
Do you have collaborations like the one with NOAA with any other major U.S. agencies?
We’ve worked extensively with NASA over the years. For example, we have worked with them on the ice bridge project. That is where they survey ice at both poles to measure its thickness and how global warming is affecting it. They use our system on that to do the georeferencing. We also work extensively with other branches of NOAA for their shoreline mapping from their ships. We have worked with them over the years to provide the georeferencing solution for the multibeam echo sounders to produce their nautical charts.
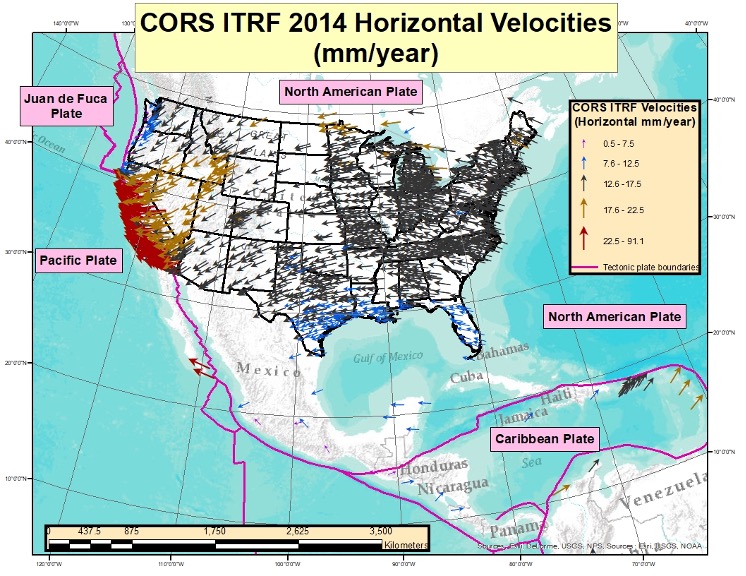
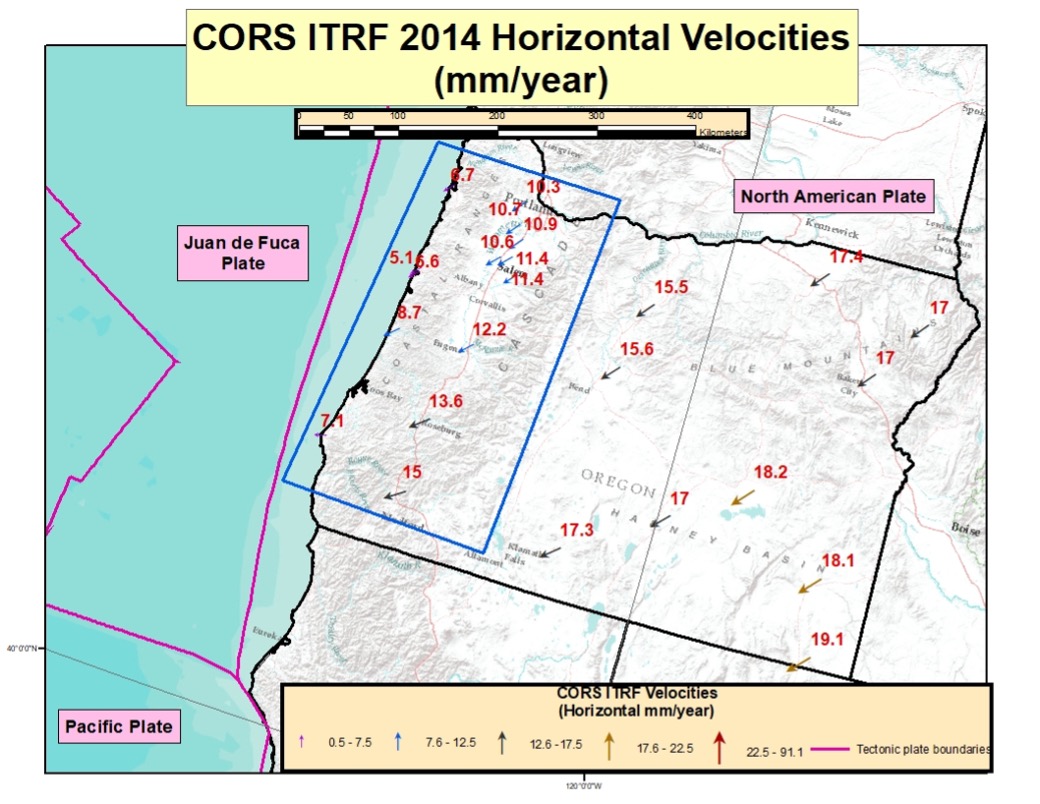
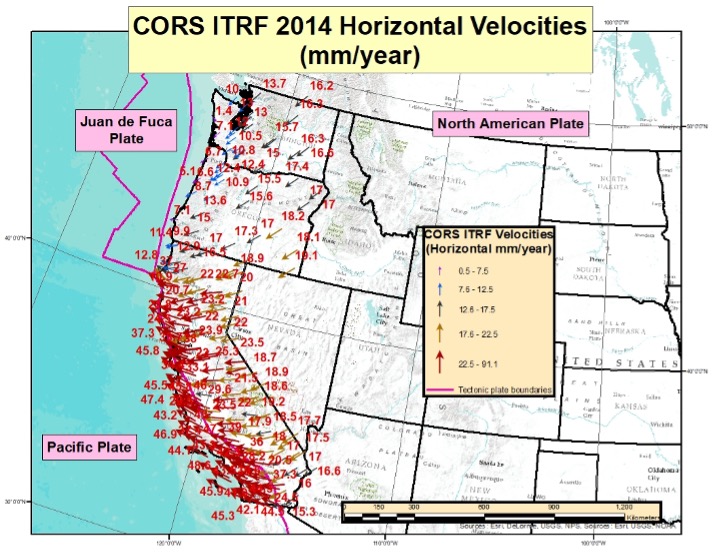
My February column explained why it is important to account for horizontal movement of marks everywhere, and not just in areas influenced by active crustal movement due to earthquakes such as Southern California.
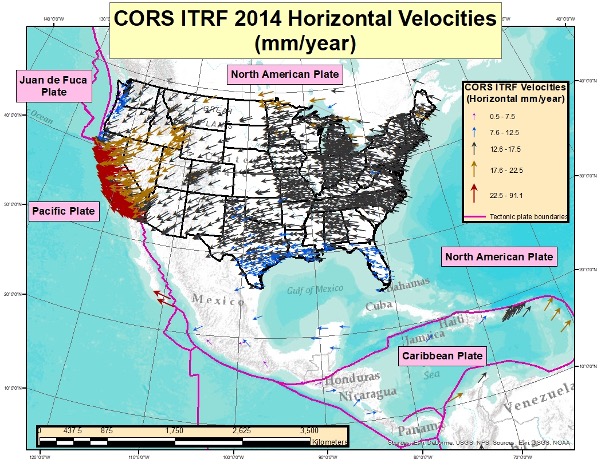
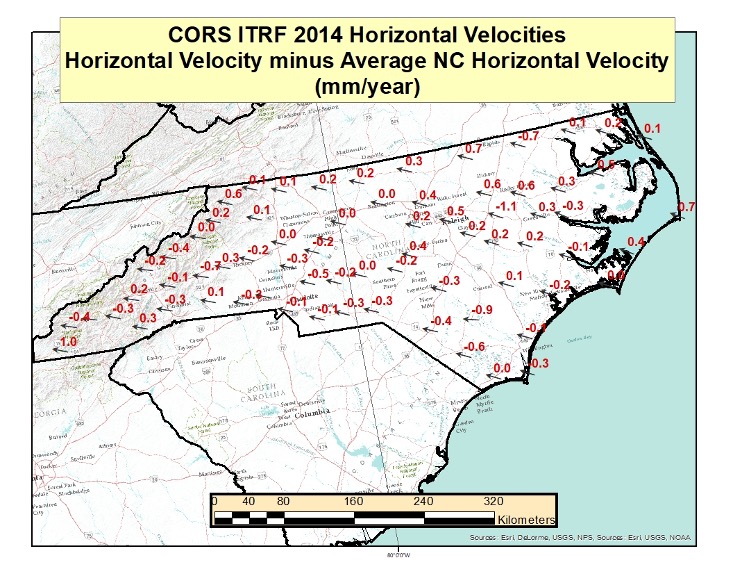
It provided information about the NOAA CORS Network (NCN) rates of movement based on International Reference Frame of 2014 (ITRF2014) coordinates and horizontal velocity information. It highlighted reports from the National Geodetic Survey (NGS) that describe models that will facilitate users transferring coordinates between reference frames and dealing with intra-frame movement between marks based on surveys performed at different epochs.
NAPGD2022 orthometric heights will primarily be accessed through GNSS technology.
As I stated in my February column, this is not just a horizontal positioning issue. In this month’s column, I address estimates of vertical movement that will have to be accounted for in the new, modernized National Spatial Reference System (NSRS).
NAPGD2022 will provide gridded models for North America (that includes CONUS, Alaska, Hawaii, the Caribbean, Canada, Mexico, Central America and Greenland), American Samoa and Guam/Commonwealth of Northern Mariana Islands (CNMI). My previous columns have described the NAPGD2022 in detail. The revised NOS NGS 64 report mentioned that NAPGD2022 will be built upon ITRF2020. It states that NAPGD2022 will operate equally well in any of the four new terrestrial reference frames developed as part of the new, modernized NSRS in 2022.
As I stated in previous columns, orthometric heights in NAPGD2022 will be defined through GNSS ellipsoid heights and GEOID2022. This means NAPGD2022 orthometric heights will primarily be accessed through GNSS technology. GEOID2022 will be defined in a manner that best fits global mean sea level at the epoch of NAPGD2022.
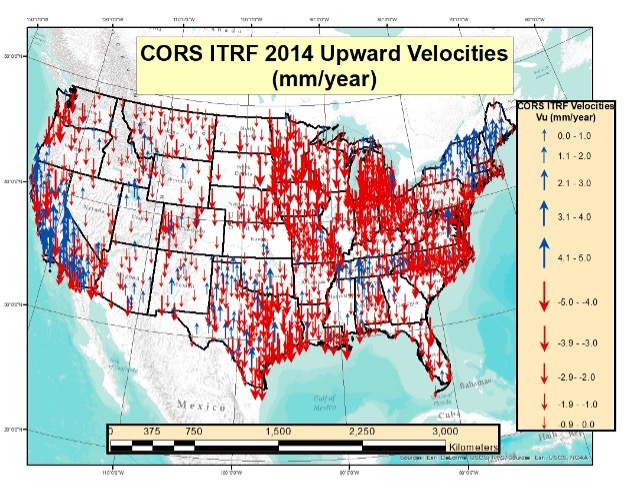
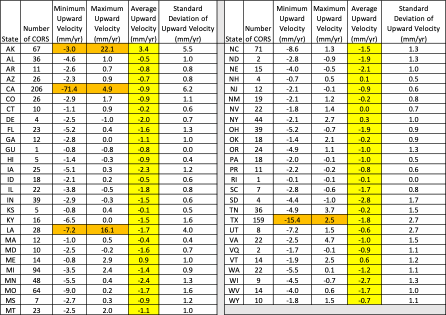
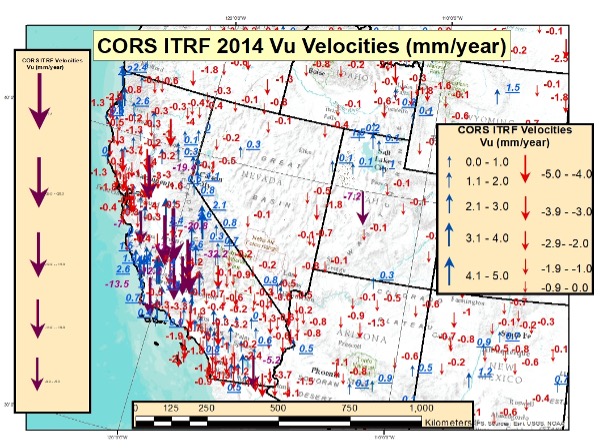
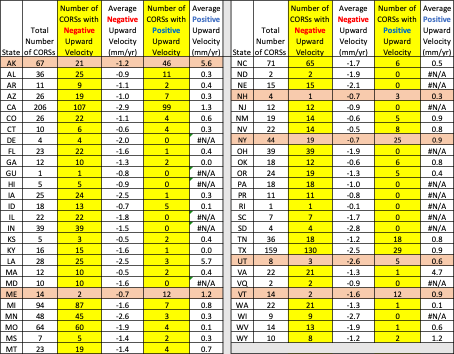
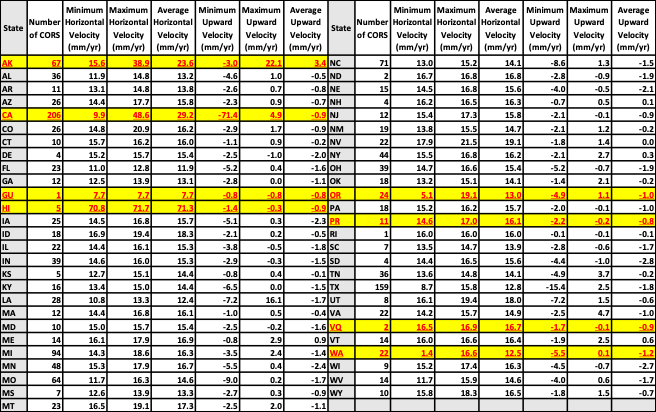
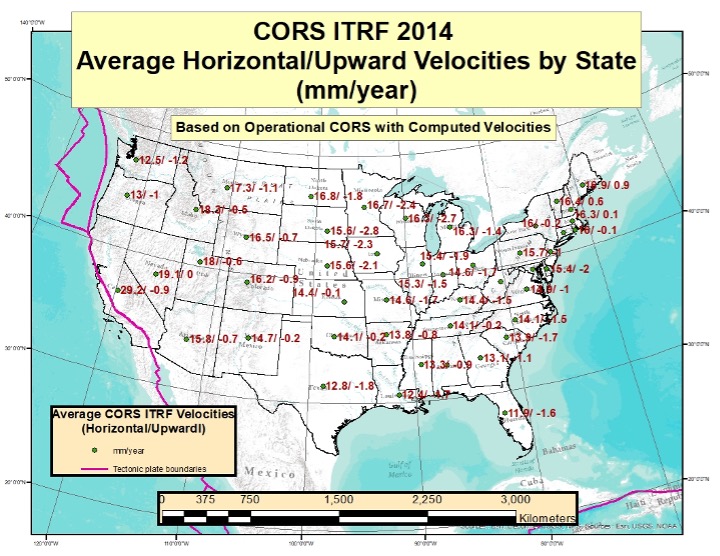
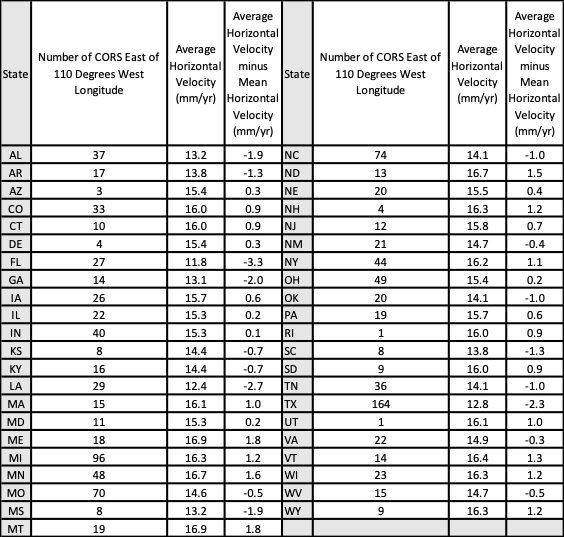
As in my previous column, to better visualize the potential size of the vertical movement, I used the CORS ITRF2014 coordinates and velocities from the NGS website to create plots depicting the upward velocity (Vu) values for CORS that are designated as operational and have computed velocities. [Note: I use the term upward because that is how it is reported on the NGS CORS website under the tab labeled “position and velocity.” The term upward velocity means movement in both directions — negative is downward and positive is upward.] The box below shows maximum, minimum, average and standard deviations of upward velocity values for each state and territory of the United States.
Table of ITRF 2014 Upward Velocities of US CORSs
The upward velocity values are not as systematic as the horizontal velocity values, and they are significantly smaller. I have highlighted the average value velocity column. As indicated in the table, the values vary from state to state, but they are all small relative to the horizontal movement values. (See my previous column for plots depicting the horizontal values.)
What is interesting is the range of values in some states. For example, Alaska and California have a very large range — understandable because of the active earthquakes and other movement that occur in these states. Also, Louisiana and Texas have a very large range due to local subsidence.
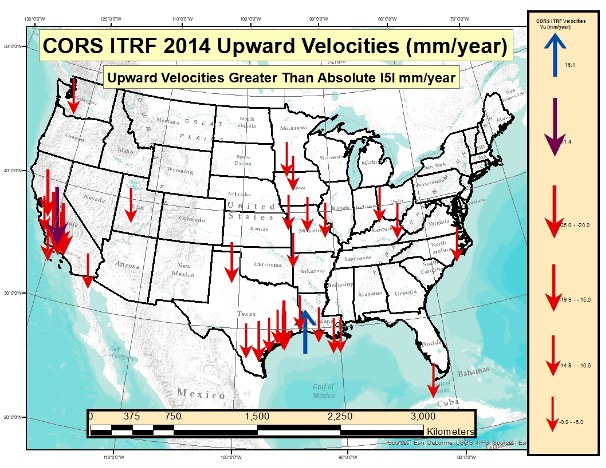
I decided to highlight the values for the conterminous United States (CONUS) in two separate plots. The box “Upward Velocities (Vu) Between +/–5 mm/year in CONUS” depicts upward velocities (Vu) between +/–5 mm/year in CONUS. The box “Upward Velocities Greater than Absolute Values of 5 mm/year in CONUS” depicts upward velocity values greater than +/–5 mm/year.
Upward Velocities (Vu) between +/- 5 mm/year in CONUS
Image: Dave Zilkoski
It’s obvious that most of the vertical movement values are between +/–5 mm/year in CONUS. There are some large values in California, Louisiana and Texas. This is highlighted in both plots.
Upward Velocities (Vu) Greater than Absolute Values of 5 mm/year in CONUS
(Image: Dave Zilkoski)
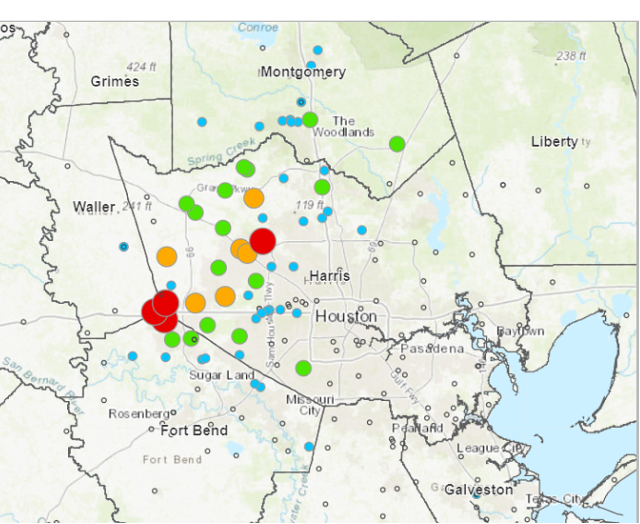
As indicated in the plots, some of the values exceed 10 mm/year. In five years, the heights of marks in these regions could potentially change by 5 cm. An example of the potential subsidence in the Houston-Galveston, Texas, region is depicted in the box below. As indicated in the plot, some marks are subsiding greater than 2 cm/year. That means in five years the marks in that region could have subsided more than 10 centimeters.
Estimate of Subsidence in the Houston-Galveston, Texas, Region
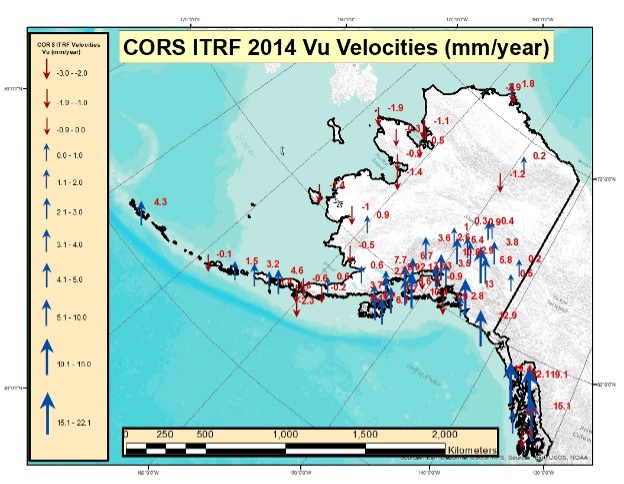
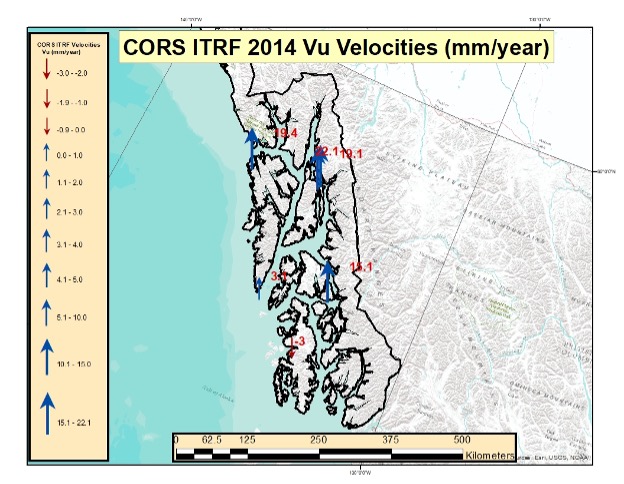
The box below depicts the values in Alaska. Most of these values indicate that the marks are uplifting. Some of these values exceed 10 mm/year. Once again, height coordinates in some regions will potentially change 5 cm in five years. I generated a separate plot for the southeastern region of Alaska. (See the box titled “Upward Velocities (Vu) in Southeastern Alaska.”)
Upward Velocities (Vu) in Alaska [All Values]
Image: Dave Zilkoski
Upward Velocities (Vu) in Southeastern Alaska [All Values]
Image: Dave Zilkoski
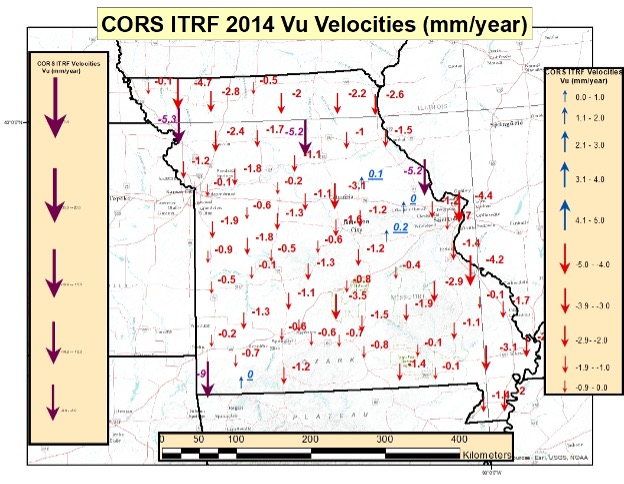
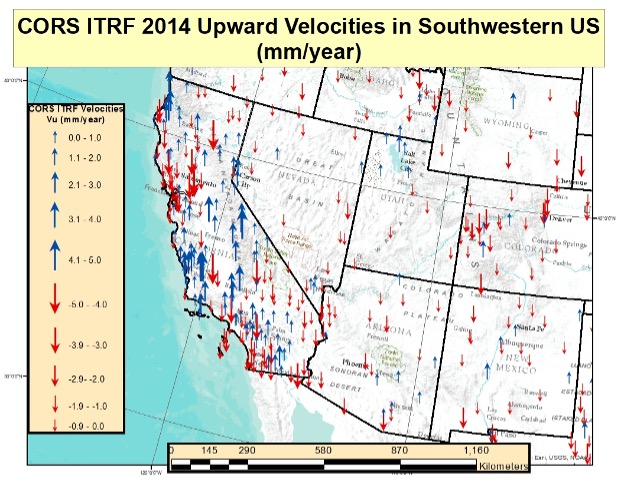
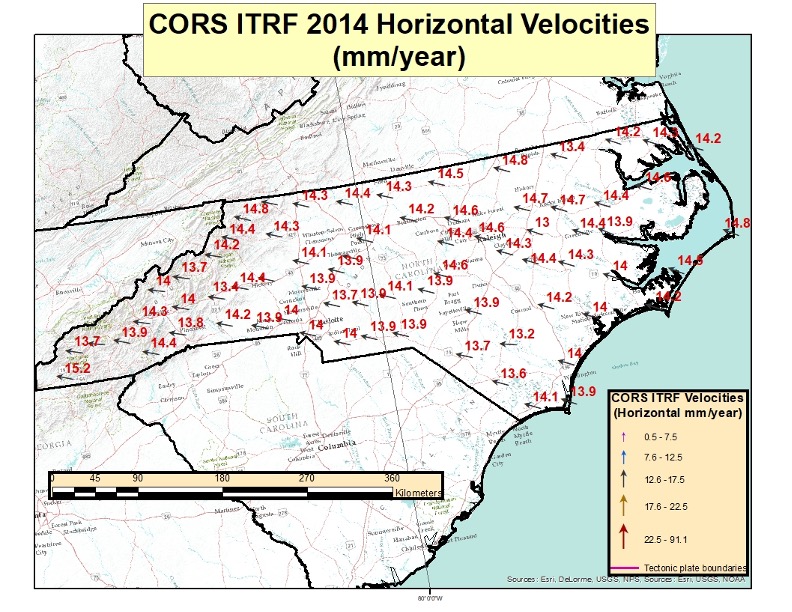
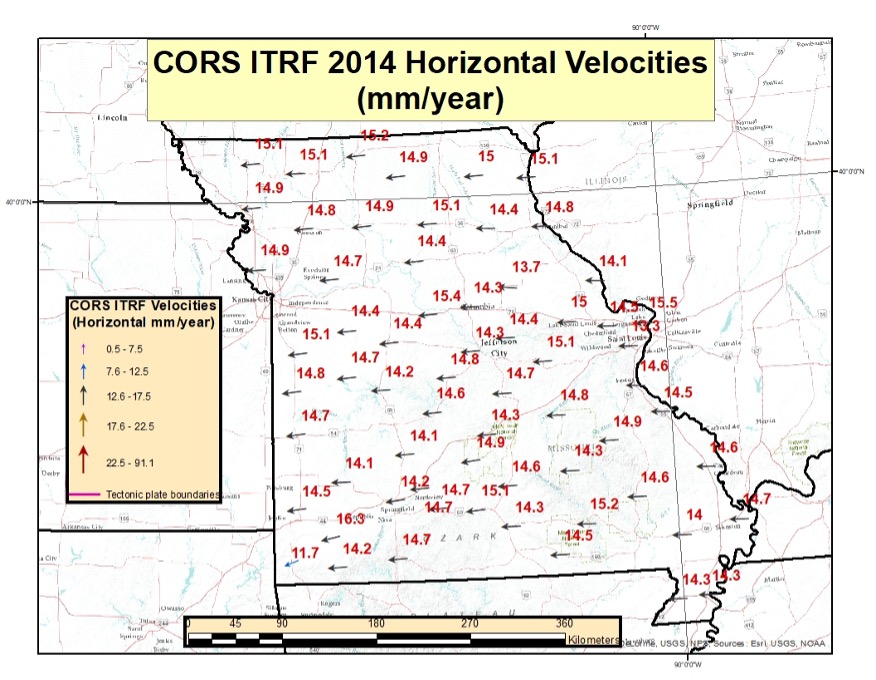
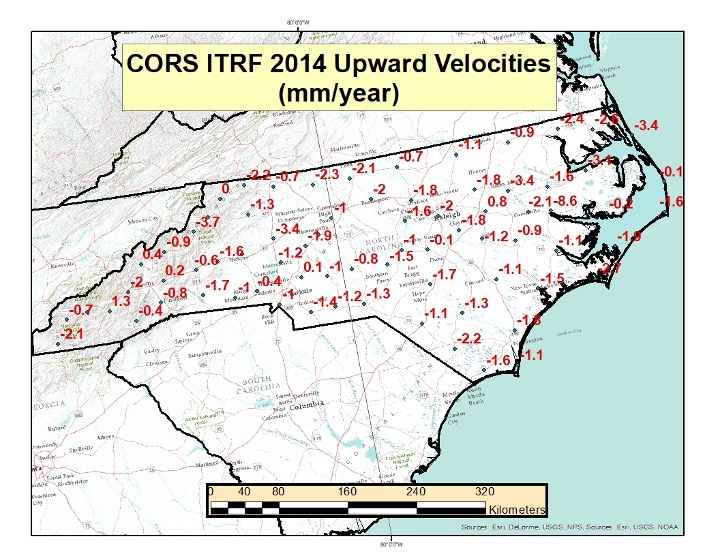
As I did in my previous columns, I prepared several plots that depict the upward velocities in various regions of the United States. See the boxes below for North Carolina, Missouri Southwest U.S. The plots indicate that the magnitude of the vertical movement varies from state to state, as well as within the states.
CORS ITRF 2014 Upward Velocities (Vu) in Missouri [All Values]
Image: Dave Zilkoski
CORS ITRF 2014 Upward Velocities (Vu) in Southwest U.S. [All Values]
Image: Dave Zilkoski
CORS ITRF 2014 Upward Velocities (Vu) in Southwest U.S. [Values Between +/- 5 mm/year]
Image: Dave Zilkoski
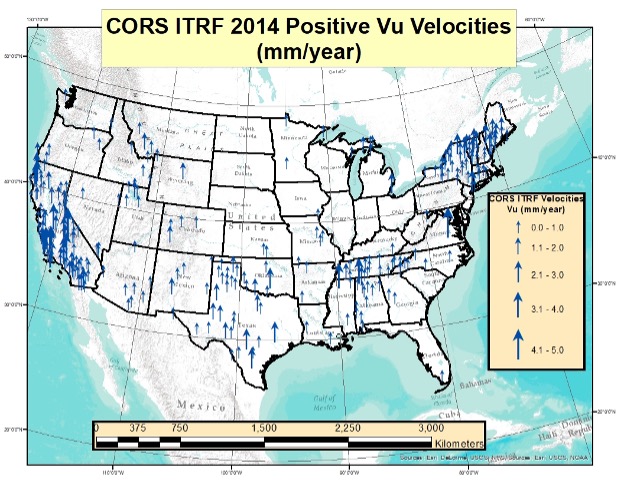
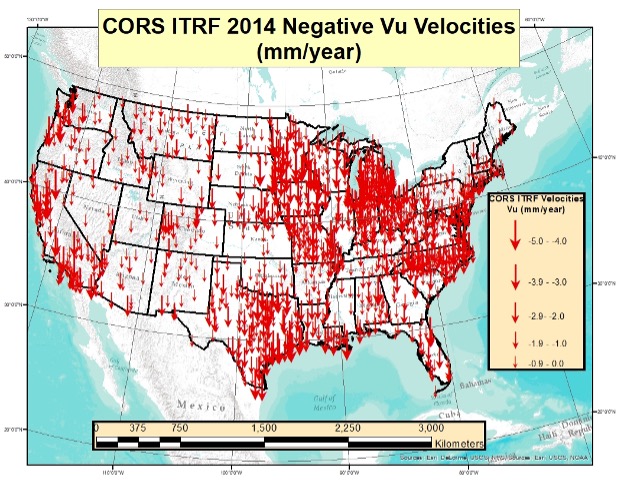
I also generated plots that separately depict the positive and negative upward velocities for the conterminous United States. There are more negative upward velocity values than positive values.
CORS ITRF 14 Positive Upward Velocities (Vu) in Conterminous U.S. (Values between 0 and 5 mm/year)
Image: Dave Zilkoski
CORS ITRF 2014 Negative Upward Velocities (Vu) in Conterminous U.S. (Values between -5 and 0 mm/year)
Image: Dave Zilkoski
The table below provides the number of CORS with negative upward velocity values and the number of CORS with positive values for every state and territory of the United States. I have highlighted the states and territories that have more positive values than negative values. As you can see, only six states have more positive upward velocities than negative values. Four of the six states are in Northeastern United States.
Table of ITRF 2014 Positive and Negative Upward Velocities for United States
So far, this column has only addressed the vertical movement at the NCN CORS. The values at the sites indicate the potential movement of marks in the area of the CORS. The rates are based on GNSS data and have an estimate of error associated with them.
I’m not sure how NGS will address the vertical movement effects in the new, modernized NSRS. That said, NGS will be monitoring the CORS and looking for trends to help describe the movement at the CORS. These trends will be an indication of what may be happening in the area.
In addition to the movement of individual marks, there are geophysical reasons for changes in the geoid. As I stated in previous columns, orthometric heights in NAPGD2022 will be defined through ellipsoid heights and GEOID2022. Therefore, changes in the geoid model will be very important to users estimating orthometric heights using GNSS.
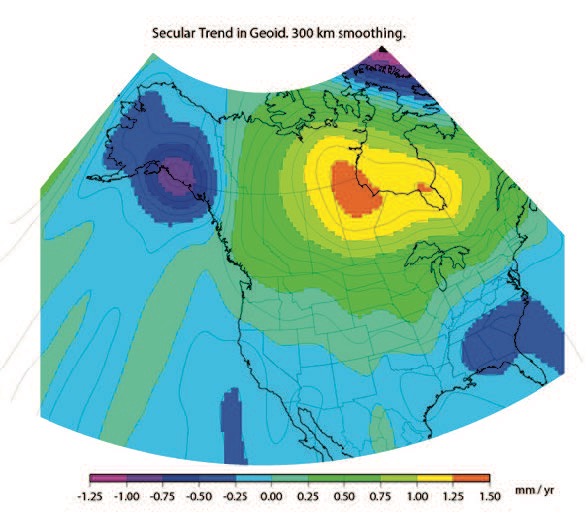
As stated in the NGS 64 report, NGS has set a goal of maintaining geoid accuracy at 1 centimeter (1 standard deviation) in both absolute and differential geoid undulations. Figure 13 from the NGS 62 Report depicts an estimate of the secular change in the geoid. As indicated in the plot, the changes are very small, ranging from –1.25 mm/year to 1.5 mm/year.
What I find interesting is the small negative change in the southeastern United States. There are other drivers for geoid changes. Future columns will address some of these changes and what it means to users.
Figure 13 from NOS NGS 62 Report
Image from NGS website: Blueprint 2 Revised NOAA_TR_NOS_NGS_0064.pdf
Figure 13 – Secular Geoid Change
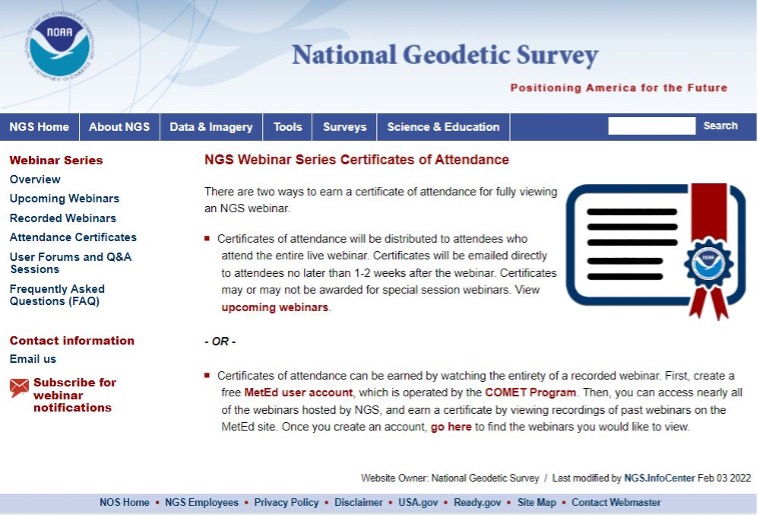
Lastly, I’d like to highlight a new service from NGS: “NGS Webinar Series Certificates of Attendance.” See the box titled “Ways to Earn a Certificate of Attendance.” Basically, users can earn certificates by viewing a webinar after it has been posted by NGS. This is very useful for users who could not attend the original webinar. I encourage all users to check out the site to find out more information about the new service.
Ways to Earn a Certificate of Attendance
Image from NGS website: https://geodesy.noaa.gov/web/science_edu/webinar_series/certificates.shtml
It’s the beginning of 2022 and the new, modernized NSRS is only about three years away. Hopefully, everyone has been reading NGS’s blueprint documents updated during 2021, and participating in NGS’s webinar series. Together, they provide the latest information about the changes from the existing NSRS to the new NSRS.
My previous columns highlighted many aspects of the new geometric reference frame and geopotential datum. In this month’s column, I will highlight the time-dependent aspect of the modernized NSRS and why it is necessary for the new system.
As I stated before, NOAA’s National Geodetic Survey (NGS) is developing models and tools for users to be able to transform coordinates between the four national terrestrial reference frames and the International Terrestrial Reference Frame, the Geopotential Datum and the North American Vertical Datum of 1988 (NAVD 88), as well as estimate coordinates at epochs different from the survey observation epoch by accounting for movement.
What does NGS mean by estimate coordinates at epochs different from the survey epoch, and why is it necessary to account for movement for the new, modernized NSRS? This column will address these issues.
NGS’s January 2022 (Issue 27) edition of NSRS Modernization News announced a paper about the modernized NSRS and a change in name to the Intra-Frame Velocity Model (IFVM). See the box below. Users can sign up for these newsletters here, and can obtain access to previous newsletters here.
The Latest Issue of
NSRS Modernization News
Image from GovDelivery Communications Cloud on behalf of NOAA’s National Ocean Service.
The new paper was published in October 2021 and is titled “The Mathematical Relation between IFVM2022 as Expressed in ITRF2020 with IFVM2022 as Expressed in the Four Terrestrial Reference Frames of the Modernized NSRS with Dependence on EPP2022.” It can be downloaded here.
The paper describes the mathematical relationship between the Intra-Frame Velocity Model (IFVM2022) and the Euler Pole Parameters (EPP2022).
The NSRS Modernization News announcement states that the IFVM2022 name has been changed to the Intra-Frame Deformation Model (IFDM2022). The latest version of blueprint 1 and the October 2021 (NOS NGS 90) report were published before the name changes, so they refer to IFVM2022 instead of IFDM2022.
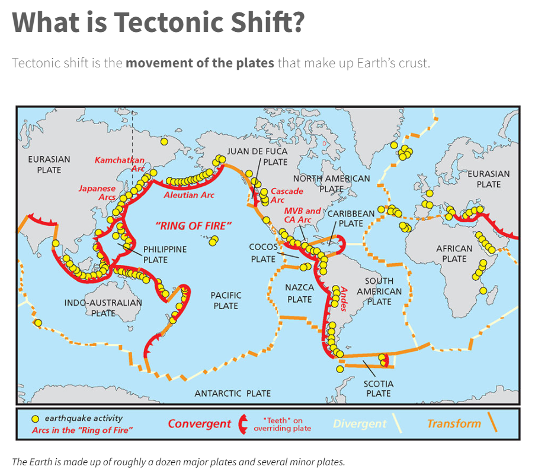
Why is it necessary to account for movement? Coordinates basically change because the Earth’s surface is moving due to the movement of major tectonic plates. See the box below for information about why it is called plate movement or tectonic shift. NGS understands this and is attempting to manage the changing coordinates by providing a time-dependent component.
Image: National Ocean Service website
Screenshot: NOAA Website
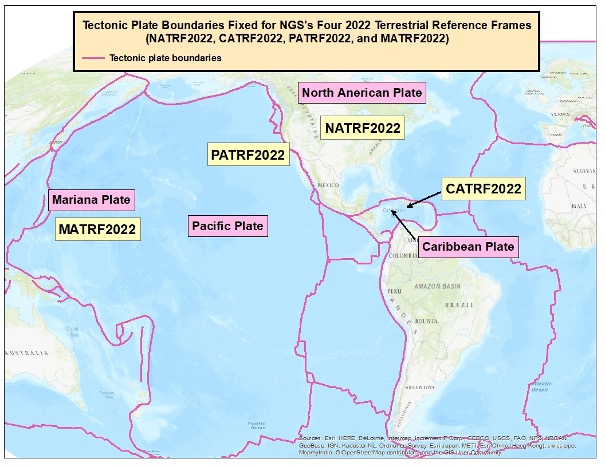
NGS will be defining the following four geometric terrestrial reference frames that are based on the tectonic plates (see map below):
North American Terrestrial Reference Frame of 2022 (NATRF2022)
Pacific Terrestrial Reference Frame of 2022 (PATRF2022)
Caribbean Terrestrial Reference Frame of 2022 (CATRF2022)
Mariana Terrestrial Reference Frame of 2022 (MATRF2022)
Four Tectonic Plates Part of NGS’s New NSRS
Image: Dave Zilkoski
As previously stated, NGS is developing models and tools for users to be able to transform coordinates between the four national frames and the International Terrestrial Reference Frame, as well as estimate coordinates at epochs different from the survey observation epoch by accounting for movement. These models are denoted as EPP2022 and IFDM2022.
So, what are EPP2022 and IFDM2022? And what does this mean to surveyors and mappers?
EPP stands for Euler pole parameters (a way of describing a plate’s rotation) and IFDM2022 is a way of computing the drift in coordinates.
Why Euler Pole? See the box titled “Who was Euler?”
Who was Euler?
Leonhard Euler was a Swiss who lived in the 1700s. He was one of the greatest mathematicians that ever lived and has been called the greatest mathematician of the 18th century. He founded the studies of graph theory and topology, and made pioneering and influential discoveries in many other branches of mathematics such as infinitesimal calculus. He introduced a lot of modern mathematical terminology and notation, including the notion of a mathematical function. He is also known for his work in mechanics, fluid dynamics, optics, astronomy and music theory.
The definition of Euler’s fixed point theorem states that any motion of a rigid body on the surface of a sphere may be represented as a rotation about an appropriately chosen rotation pole, called a Euler pole. This theorem has been used by geologists to understand and describe the motions of tectonic plates.
NGS’s 2021 revised Blueprint 1, NOAA Technical Report NOS NGS 62, Blueprint for the Modernized NSRS, Part 1: Geometric Coordinates and Terrestrial Reference Frames provides an explanation of Euler poles and “plate-fixed” frames. As stated in the “Who was Euler?” box, the definition of Euler’s fixed-point theorem states that any motion of a rigid body on the surface of a sphere may be represented as a rotation about an appropriately chosen rotation pole, called a Euler pole. The following is stated in the NOS NGS 62 report under “Plate-Fixed Frames and Euler Poles,” section 4:
When considering only the rigid (not deforming) part of a tectonic plate, the horizontal motion of the plate (relative to a global plate-independent reference frame, like the ITRF) can be modeled as a rotation about a geocentric axis passing through a fixed point on Earth’s surface. Although such models must make certain assumptions (such as the rigidity of the plate), the dominant motion of the majority of points on most tectonic plates is the rotation about a fixed point. That point is known as an “Euler pole.”
What is important to know is that the determination of a plate’s Euler pole location and the angular velocity with which the plate rotates can be empirically determined using GNSS observations from a CORS network distributed throughout the plate. Figure 1 from the NOS NGS 62 report provides a plot of the North American plate Euler pole and the vectors of the horizontal velocities at select CORS (see the box titled “Figure 1 from NOS NGS 62”).
Every place on Earth is moving. That includes neighboring marks on the same tectonic plate. What this means is that after the Eulerian motions are removed, the remaining motions left over change the relative differences in coordinates of neighboring marks located on the same tectonic plate. Figures 2 and 3 from the NOS NGS 62 report provide plots of estimates of these remaining velocities (see the boxes titled “Figure 2 from NOS NGS 62” and “Figure 3 from NOS NGS 62.”)
Figure 2 is a plot of the non-Eulerian motions east of 110° west longitudes. As stated in the report, most of the velocities are less than 2 mm/year. The concept is that the EPP2022 and IVDM2022 models will remove the Eulerian and non-Eulerian movement of the marks.
Figure 2 from NOS NGS 62
Image: NGS website
Figure 3 is a plot of non-Eulerian vectors west of 110° west longitude. As indicated in the plot, the large vectors in Western California, Western Oregon and Western Washington show areas of deformation near plate boundaries that don’t appear to be adequately captured just from the North American plate rotation.
Figure 3 from NOS NGS 62
Image: NGS website
It should be noted that the size of the vectors on Figures 2 and 3 depict a different magnitude of movement. Figure 2 depicts vectors at 1-3 mm/year and Figure 3 depicts movement at 10-30 mm/year.
To better visualize the potential size of the movement, I downloaded the CORS ITRF2014 coordinates and velocities from NGS’s website and compiled the results. See the boxes titled “CORS ITRF 2014 Horizontal Velocities” and “Table of ITRF 2014 Horizontal and Upward Velocities of U.S. CORSs.”
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
The box titled “CORS ITRF 2014 Horizontal Velocities” provides the horizontal vectors based on NGS’s file downloaded on Jan.13. Only CORSs designated as operational and computed velocities were included in the plot.
I have also created a table that includes a summary of the ITRF rates for CORS labeled as part of the United States. The table includes the following information for each State and Territory of the United States:
Number of CORS
Minimum Horizontal Velocity (mm/year)
Maximum Horizontal Velocity (mm/year)
Average Horizontal Velocity (mm/year)
Minimum Upward Velocity (mm/year
Maximum Upward Velocity (mm/year),
Average Upward Velocity (mm/year).
See the table below.
Table of ITRF 2014 Horizontal and Upward Velocities of U.S. CORSs
Computed Velocities Only (Downloaded Jan. 13, 2022)
Highlighted territories are not on the North American plate (GU, HI, PR, and VQ), and highlighted states are partly inside or close to the boundary of the North American plate and another tectonic plate (AK, CA, OR, WA).
The highlighted territories in the table are not on the North American plate (GU, HI, PR and VQ), and the highlighted states are partly inside or close to the boundary of the North American plate (CA, OR, WA). This is one of the reasons why their minimum and maximum horizontal velocity values are different from most of the other states’ values.
To visualize the relative differences in horizontal velocities between neighboring CORSs, I plotted the ITRF 2014 Horizontal Velocities for CORSs located in North Carolina (see the box titled “CORS ITRF 2014 Horizontal Velocities in North Carolina”). Looking at the figure, it’s obvious that all of the velocities are around 14 mm/year and moving in the same direction.
CORS ITRF 2014 Horizontal Velocities in North Carolina
Computed Velocities Only (Downloaded Jan. 13, 2022)
Screenshot: Dave Zilkoski
I plotted the horizontal velocities for Missouri to provide an example of the velocities in the central region of the conterminous United States. The magnitude of the velocities is similar to that for North Carolina, but the direction of the vector is slightly different. North Carolina’s average horizontal velocity is 14.1 mm/year and Missouri’s average horizontal velocity is 14.6 mm/year.
CORS ITRF 2014 Horizontal Velocities in Missouri
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
To emphasize the differences along the boundaries of the tectonic plates, I’ve included a plot of the CORS ITRF 2014 horizontal velocities for the State of Oregon and a plot of the states along the West Coast of the United States. See the boxes titled “CORS ITRF 2014 Horizontal Velocities in Oregon” and “CORS ITRF 2014 Horizontal Velocities Along West Coast of CONUS.” As indicated in the plot, there are significant changes in horizontal velocities near the Oregon coast. The values decreased by about 10 mm/year from the inland CORS to the CORS along the coast.
CORS ITRF 2014 Horizontal Velocities in Oregon
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
The plot of the CORS ITRF 2014 Horizontal Velocities Along West Coast of CONUS clearly indicates the change in magnitude the closer the CORS are to the Pacific and Juan de Fuca plates.
CORS ITRF 2014 Horizontal Velocities Along West Coast of CONUS
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
For completeness, I’ve also included a plot of the horizontal velocities for Alaska.
CORS ITRF 2014 Horizontal Velocities in Alaska
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
To better visualize the horizontal and upward velocities of CORS among states, I plotted the average horizontal and upward velocity value for each state based on that states’ CORS. See the box titled “Average Velocities by State.”
Average Velocities by State
Image: Dave Zilkoski
I also computed an average horizontal velocity value based on CONUS CORS east of 110° west longitude (denoted here as a regional horizontal velocity value). [I used the CORSs east of 110° west longitude to be consistent with NGS’s Figure 2 in NOS NGS 62.]
The box below summarizes the average horizontal motion for each state. The table provides:
The Number of CORS East of 110° West Longitude
Average Horizontal Velocity (mm/year)
Average Horizontal Velocity minus Regional Horizontal Velocity (mm/year).
This provides an estimate of the variation of the relative horizontal motion between States.
Table of ITRF 2014 Horizontal Velocities minus Regional Velocity of U.S. CORS East of 110° West Longitude
Table only includes CORS East of 110° West Longitude (Image: Dave Zilkoski)
The box titled “Horizontal Velocities in NC Minus Average Velocity” depicts the resulting horizontal velocities with an average velocity removed (the average velocity was based on NC CORS only) for all CORS in North Carolina. As one can see from the plot, most of the resulting horizontal velocities are less than 1 mm/year, but they are still not zero. Once again, this is only meant to provide an idea of the size of the relative vectors between CORS in North Carolina.
As indicated in the NOS NGS 62 report, these horizontal velocities will be small, but they will not be zero. Hence the reason that NGS needs to provide models and tools for users to be able to transform coordinates between the four national frames (NATRF, PATRF, CATRF and MATRF) and the International Terrestrial Reference Frame (ITRF), as well as to estimate coordinates at epochs different from the survey observation epoch by accounting for movement within the reference frame. Surveyors in California have been dealing with these types of movements for many years now.
Horizontal Velocities in NC Minus Average Velocity
(Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
I plotted the ITRF 2014 upward velocity values of the CORS in North Carolina to depict an estimate of the vertical movement of the CORS in North Carolina. See the box below. The vertical velocities values are much less than the horizontal velocities, but they still are not zero. A future column will address the upward velocities based on the ITRF 2014 rates and crustal movement models.
CORS ITRF 2014 Upward Velocities in North Carolina
(Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
This column explained why it is important to account for movement of marks everywhere and not just in areas influenced by active crustal movement due to earthquakes such as in Southern California. It provided information about the CORS rates of movement based on NGS’s ITRF2014 coordinates and velocity information. It highlighted NGS’s reports that describe models that will facilitate users transferring coordinates between reference frames and dealing with intra-frame movement between marks based on survey performed at different epochs. This is not just a horizontal positioning issue.
A future column will address estimates of vertical velocities in the new, modernized NSRS.
Rokubun has launched JASON, a satellite navigation service for accurate geolocation. With JASON, users can achieve highly accurate geolocation without a base station, Rokubun said.
JASON works under a “freemium” pricing model, making it possible to use it for free or to subscribe to monthly professional or premium plans.
JASON is a post-processed kinematic (PPK) satellite positioning service in the cloud that allows users to achieve highly accurate geolocation by uploading GPS/GNSS campaign data. JASON will try to obtain the best possible positioning solution on a best-effort basis. It will use PPK with the nearest GNSS continuously operating reference station (CORS) in the service’s database or with he user’s own provided station if no close CORS are available, or precise point positioning. The data can be processed interactively by using the Rokubun website or automating the workflow via the Rokubun API.
JASON also features a free data-conversion service for GNSS raw measurements.The service is compatible with Argonaut, u-blox, Septentrio, Android GnssLogger and any receiver able to export industry standard RINEX v2 or v3 file formats.
According to Rokubun’s CEO Xavier Banqué-Casanovas, JASON cloud service allows users to get the best possible performance out of their GNSS equipment using an internet browser, without the need for special installation or updates requirements.
Auto Mining: A driverless Cat 793F CMD truck leaves an iron ore pit. (Photo: Caterpillar)
Individuals who use GNSS today may not know the significant advancements that have been accomplished over the past 30 years to obtain accurate GNSS-derived coordinates, especially GNSS-derived orthometric heights.
Thirty years ago, there were two limiting factors for estimating GNSS-derived heights — estimation of accurate ellipsoid heights in a timely manner and the availability of an accurate geoid model. The geoid model was only good to the decimeter level, between two stations relatively close together. A significant improvement of the measurement of the Earth’s gravity field (such as from the GRACE mission) and digital elevation data (from the Space Shuttle Radar Topography Mission) facilitated the creation of more accurate geoid models. Geoid models went from decimeter values to centimeter, and then sub-centimeter values between closely spaced marks.
A new national network
During the past three decades, the U.S. National Geodetic Survey (NGS) has developed a national network of Continuously Operating Reference Stations (CORS). These CORS, along with the states’ real-time networks (RTNs), have provided the ability to compute accurate GNSS-derived coordinates in an efficient and effective manner. The modeling of antenna phase patterns was a critical development for combining different types of antennas.
Today’s GNSS processing software is basically a “hands-off black-box” system. But 30 years ago, the analyst had to identify cycle slips and ensure that all unknown cycle ambiguities of the carrier-phase data (integers) were determined correctly. It was a time-consuming task, and analysts needed to understand the data. So many things can go wrong when someone relies on an answer from a black box. That said, federal agencies such as NGS and GNSS software companies have produced hands-off software that provides statistics and warning messages, as well as guidelines for ensuring results are consistent and accurate.
The advancements in estimating GNSS-derived coordinates (including orthometric heights) have changed the way many industries do business. Farmers use it to drive their tractors and combines, mining companies control driverless vehicles, construction companies use automated machine guidance to build roads, and, of course, it has improved how individuals navigate from one location to the next.
Hands-off farming and mining
Thirty years ago, few farmers thought they would be able to sit in their cab and let their combine harvester drive itself. Geodesist, surveyors, and engineers had a vision of using GNSS to automate the use of farming and construction equipment, which became a reality.
What will it be like in another 30 years? Will it be routine for individuals to program their car for a destination, and then sit back and read a book?
Positioning with GNSS will be critical for the safety factor of driverless vehicles and the use of drones for delivery. Geodesists, surveyors and engineers, once again, need to lead the way to meet the positioning requirements of the future.