The Algiz 10XR’s screen features a glove/rain mode. (Photo: Handheld)
Handheld Group, a manufacturer of rugged mobile computers, has released the Algiz 10XR, a rugged 10-inch Windows tablet that combines durability with a GNSS receiver, 5G and future-proof features.
The Algiz 10XR was developed for field work or other challenging environments in markets such as logistics, mining, public transport, public safety, waste management or geographic information systems (GIS). It also has also been designed with customization in mind.
The tablet has a dedicated multiband GNSS u-blox NEO-M8U receiver for accurate positioning. The NEO-M8U module offers u-blox’s untethered dead-reckoning technology, which provides continuous navigation even under weak GNSS conditions.
Other key features
future-proof 5G communication for live video streams and bandwidth-heavy tasks such as mapping
Intel Elkhart Lake x6000 platform for reliable performance
Windows 10 Enterprise LTSC (64 bit)
high-resolution, sunlight-readable 10-inch touchscreen with super-hardened glass and rain-and-glove mode
future-proof 5G capabilities, 4G/LTE high-speed data, Wi-Fi, Bluetooth
IP65 and MIL-STD ruggedness
full-day, hot-swappable battery
optional, integrated barcode scanner and near-field communications.
The tablet is supported by a broad set of accessories for field professionals: carry cases, vehicle cradles, pole mounts, extended batteries, and a vehicle dock with antenna pass-through for both GPS and Wi-Fi.
“The Algiz 10XR will bring some great performance gains for our partners and customers who rely on Windows tablets in the field,” says Johan Hed, Handheld chief product officer. “We’ve worked with this segment for decades now and are confident that we’ve developed a device with not only great specs, but a complete accessory package to help our customers with their fieldwork.”
An interview with Markus Uster, head of product center positioning at u-blox about recent GNSS receiver innovations.
Uster
What was the most significant technical innovation in your GNSS receivers in the past five years?
The u-blox F9, launched in 2018, is our robust and versatile high-precision positioning technology platform. It was the first receiver to enable multi-band high-precision positioning solutions for mass-market industrial and automotive applications — and remains the benchmark for the industry today.
The platform combines multi-constellation (continuous reception of four satellite constellations) GNSS technology with dead reckoning and high-precision algorithms. It is also compatible with a variety of GNSS correction data services to achieve positioning accuracy down to the centimeter level.
The u-blox F9 platform is leading the next generation of high-precision navigation with its augmented reality, unmanned vehicles and various machine automation applications. It has since been integrated into a selection of modules catering to a wide range of applications.
What has it enabled users to do that they could not do before?
The u-blox F9 is a widely adopted multi-band GNSS platform for automotive and industrial applications. (Photo: u-blox)
In a nutshell, the u-blox F9 brought high-precision positioning to the mass market. The demand for scalable high-precision technology is growing rapidly, as evident in the automotive world with next-generation advanced driver-assistance systems (ADAS) and in robotics with applications such as UAVs and robotic lawnmowers. However, due to the complexity, size, power and cost restrictions of existing high-precision solutions, until now it has been difficult to meet the demands of these markets.
u-blox developed the u-blox F9 platform by building on the success of our NEO-M8P high-precision GNSS module series and drawing on our extensive experience in GNSS positioning technologies, including dead reckoning, multi-band, real-time kinematic (RTK) and GNSS correction services. The platform delivers the next level of scalable GNSS high-precision technology and shows how u-blox is consistently addressing challenges and driving the GNSS technology evolution.
What is a good example of this?
Integration of the u-blox F9 platform into various applications has proven quite successful in a diverse range of use cases. In the industrial realm, u-blox F9 technology enables mass adoption of commercial unmanned vehicle applications. One example is precision agriculture, where high-precision positioning cost-effectively enables vehicle guidance solutions to improve pass-to-pass accuracy resulting in improved crop yield and reduced consumption of pesticides, fertilizer and seeds. The u-blox F9 modules also paved the way for autonomous driving, including lane-level navigation for heads-up displays and vehicular infotainment systems, a prerequisite for highly automated and fully autonomous vehicles.
Quectel Wireless Solutions has released the LC29H, a dual-band multi-constellation GNSS module. Built using the Airoha AG3335 platform, the LC29H is available in multiple variants and optionally integrates real-time kinematic (RTK) and dead reckoning.
The LC29H series offers high performance with power efficiency to meet the market needs of high-precision positioning at the centimeter and decimeter levels. The modules are suited to an expanding market for autonomous lawn mowers, drones, precision agriculture, micro-mobility scooters and delivery robots as well as other industrial and autonomous applications.
“High-precision positioning with centimeter-level accuracy is becoming increasingly vital for many new IoT [internet of things] applications,” said Patrick Qian, Quectel CEO. “Robotics, UAV and industrial applications needing precise navigation are driving new market requirements, and we are very excited to launch our newest generation of high-precision positioning modules.”
The LC29H concurrently receives and processes signals from GPS, GLONASS, BeiDou, Galileo and QZSS. The module supports L1 and L5 dual-band signal reception, speeding up convergence time, improving positioning accuracy, and achieving fast response times even when signals are interrupted. The dual-band design significantly mitigates the multipath effect experienced near high-rise buildings or in deep urban canyons, and provides reliable positioning performance, Quectel stated.
In addition, some versions of the LC29H contain a six-axis inertial measurement unit (with three-axis accelerometer and three-axis gyroscope) and integrate RTK and dead-reckoning positioning algorithms, allowing for continuous lane-level positioning where the satellite signal is partially or completely blocked, such as underground parking lots, tunnels, urban-canyons or forests. When the satellite signal is reacquired, the LC29H combines inertial sensor data with GNSS signals, and the integrated navigation can provide fast convergence times and decimeter level positioning accuracies.
The LC29H is available in variants, each targeting different application scenarios. The LC29H(EA) is aimed at the growing market of agricultural drones as well as electricity power detection terminals, and can improve the anti-interference capability of complex systems. The LC29H(BA) is well suited to agricultural machinery and specialized vehicles, and the LC29H(DA) can enable centimeter-level accuracy in connected lawnmowers and safety helmets.
U‑blox has announced the NEO-M9V module, its first GNSS positioning receiver to offer both untethered dead reckoning (UDR) and automotive dead reckoning (ADR).
The NEO-M9V is suitable for fleet management and micro-mobility applications that require reliable meter-level positioning accuracy even in challenging GNSS signal environments such as urban canyons.
Using inertial sensor measurements, UDR offers a smooth navigation experience in dense urban environments by bridging gaps in GNSS signal coverage and mitigating the impact of multipath effects caused by GNSS signals that bounce off buildings. ADR further increases positioning accuracy in demanding environments by including the vehicle speed in the sensor-fusion algorithm.
Offering both UDR and ADR on the same module delivers maximum positioning performance and design flexibility, u-blox said. The NEO-M9V also features dynamic models optimized for both cars and e-scooters.
NEO-M9V is based on the u‑blox M9 GNSS technology platform. Its ability to track up to four GNSS constellations maximizes the number of GNSS satellites within its line of sight at any given moment. Integrated SAW and low-noise amplifier filters offer excellent interference mitigation for a robust solution. Compatibility with the NEO form factor reduces migration efforts for customers upgrading existing designs.
Swift Navigation designs, manufactures and integrates GNSS receivers, as well as providing the Skylark wide-area GNSS corrections service. Its markets are automotive, transportation (last mile delivery, commercial trucking, rail), robotics/machine control (construction, mining, precision agriculture, landscaping), UAVs, micromobility and mobile devices and applications.
The company’s technology is compatible and interoperable with most major GNSS receivers for multiple markets. Its Starling positioning engine and Skylark corrections “are scalable to bring precision to legacy low-cost single-frequency receivers, all the way to the most sophisticated state-of-the-art triple-frequency multi-constellation systems,” said Joel Gibson, Swift’s executive vice president of Automotive. “By working with a multitude of receiver vendors for different applications, Swift leverages all constellations and all signals and maximizes the performance required for the application.”
The most accurate and reliable navigation system for every application would take advantage of all available GNSS signals, as well as all available corrections, dead reckoning and fused data from other sensors, such as cameras, lidar and radar. However, of course, that is not possible due to cost, size, weight and power considerations. Swift’s approach to the trade-offs required depends on each use case.
Micromobility
In the area of micromobility (such as scooters), the main constraints for implementing a positioning solution are cost and power, coupled with the challenge of satellite signal outages and multipath in dense urban environments where these vehicles primarily operate, Gibson explained. “Cost-effective dual-frequency GNSS receivers are now showing up in micromobility architectures. Pairing them with our Starling positioning engine, which integrates inertial sensor data and wheel ticks, and augmenting them with Skylark corrections data, makes it possible to meet such compliance requirements as geofencing and limiting sidewalk use.”
Additionally, by achieving decimeter-level positioning, Swift’s micromobility solution makes it easier for both users and service staff to find scooters, which increases the scooter companies’ revenues.
Photo: Swift Navigation
Automotive
In the automotive industry, inertial sensors and wheel odometry are ubiquitous and pair naturally with GNSS to mitigate satellite signal outages, Gibson pointed out. Likewise, cameras and radar — cornerstones of ADAS — are very complementary to GNSS for safety applications, and lidar further complements GNSS in feature-rich environments such as dense urban areas.
Rail
Rail applications, such as Positive Train Control, have traditionally needed an accuracy of one or two meters, coupled with ruggedized hardware. “Swift’s precise positioning solution is deployed across continental rail systems today, and we are now engaging rail OEM and operator programs requiring sub-meter accuracy to ensure track-to-track accuracy and safety requirements in support of the transition to more autonomous rail operations,” said Gibson. “Leading rail companies are also looking for operational efficiencies by transitioning away from the high operational costs of maintaining reference base stations along track routes, instead moving to the more cost effective, reliable and seamless Skylark corrections coverage.”
SkyTraq Technology Inc. has launched a GNSS/inertial measurement unit (IMU) suitable for both automotive pre-installation and aftermarket.
The robust PX1120D dead-reckoning module integrates a 6-axis IMU and a concurrent quad-GNSS chipset, forming a sensor-fusion solution that maximizes positioning accuracy even in challenging environments. The PX1120D receives concurrent GPS/GLONASS/Galileo/Beidou/QZSS signals.
For automotive pre-installation applications where vehicle wheel-tick signals are available, the PX1120D provides wheel-tick sensor fusion with automotive dead-reckoning. In aftermarket applications where wheel-tick signals are unavailable, the PX1120D provides an untethered dead-reckoning sensor-fusion solution.
A single PX1120D module provides both automotive and untethered dead-reckoning functionality, simplifying logistics. The PX1120D provides 100% position coverage. It is suitable for infotainment systems, telematics control units, vehicle tracking, and advanced driver-assistance systems (ADAS) applications that require the highest performance and reliability, as well as uninterrupted positioning.
The PX1120D supports flexible mounting in any orientation. Its auto-calibration feature simplifies the installation procedure.
The 12 x 16 mm PX1120D offers continuous navigation in tunnels and underground parking lots. It can output attitude, gyroscope and accelerometer sensor data, making it useful for black-box driver behavior monitoring and insurance accident reconstruction.
The PX1120D uses an AEC-Q100 qualified chipset and is manufactured in ISO/TS-16949 certified plants. An engineering sample, evaluation kit and datasheet will be available by the end of August. Volume delivery to customers begins in the fourth quarter of this year.
U-blox has released a firmware update for its ZED-F9R positioning module, bringing robust centimeter-level positioning to slow-moving use cases such as robotic lawnmowers, e-scooters and shared bicycles.
Based on the ZED-F9R high-precision sensor-fusion module, the u-blox ZED-F9R-02B was designed for use in autonomous and industrial applications that require simple and efficient implementation and where rapid access to highly accurate positioning data is key, even in challenging signal environments such as dense cities.
The ZED-F9R uses the u-blox F9 multi-band GNSS receiver platform to concurrently track up to four GNSS constellations. Applying real-time kinematic (RTK) techniques, the module can derive positioning data with centimeter-level accuracy.
The high-precision GNSS measurements are fused with data from the module’s inertial measurement unit (IMU), GNSS correction data, odometry information, and a vehicle dynamics model to provide high-quality positioning accuracy in situations where GNSS alone would fail. The receiver includes dynamic models for robotic lawnmowers, e-scooters and automobiles.
The ZED-F9R-02B integrates the u-blox GNSS correction data service, broadcast in the highly scalable state-space representation format, making it easier to deliver fast time-to-market precise positioning solutions.
An autonomous lawn mower trims the grass in a park in Finland. (Photo: Scharfsinn86/iStock/Getty Images Plus/Getty Images)
Robotic lawnmowers achieve further improvements in terms of their positioning accuracy from the module’s ability to calibrate its dead-reckoning system even at low speeds. The module’s highly accurate position output lets end users precisely delimit the mowing area using software rather than with boundary wires, and deploy robotic lawnmowers on complex lawn shapes while excluding trees and shrubs. Users can align each pass of the mower with the next more accurately than before, delivering a professional-looking striped lawn.
According to U-blox, combining these features allows product designers to use the module to create mowing equipment that enables “robotic mowing as a service” capable of operating in complex environments without the upfront cost and commitment of installing boundary wires.
“Our new ZED-F9R-02B high-precision module is a turnkey dead-reckoning solution that will enable designers to bring products that need dead-reckoning technology to market more quickly than if they had to implement it from scratch,” said Alex Ngi, product manager, Industrial Navigation and Robotics, Product Center Positioning at u-blox. “It will also allow companies working in niche markets to employ dead-reckoning technologies without needing to build and maintain expertise in the subject.”
The ZED-F9R-02B offers support for a range of correction services, including the SPARTN format, which will make it straightforward to distribute GNSS correction data over large geographical areas.
iGPSPort cycling computer. In another announcement, U-blox and iGPSPORT, a sports hardware and data service provider operating out of Wuhan, China, have announced the iGS320 cycling computer, which builds on the u-blox M10 positioning platform. The cycling computer leverages the U-blox M10 platform’s ultra-low power consumption, compact size, and its ability to track all four GNSS to offer endurance athletes a superior user experience.
Adopting the U-blox M10 positioning platform in its iGS320 cycling computer brought iGPSPORT an 80 percent increase the power autonomy to deliver 72 hours of continuous tracking, up from 40 hours in their previous solution. Concurrent reception of up to four GNSS constellations increases coverage and accuracy in otherwise challenging signal environments.
According to Quectel, this paper details the challenges eMobility providers face in enabling vehicles such as eScooters and eBikes to be located in deep urban canyons. The white paper also examines why accurate location data will be vital in enabling the ride-sharing industry to comply with regulation to restrict eMobility usage on sidewalks and other areas, Quectel said.
The report also details drive test data conducted on an eScooter in San Francisco. The data demonstrates the enhanced accuracy offered by L1 and L5 plus dead reckoning capability.
Finally, the white paper discusses how the Quectel LC79D is enabling the eMobility industry to harness the fusion of different sensors in a very small footprint at low incremental cost with unparalleled accuracy, the company added.
“eMobility providers face substantial challenges when dealing with location in deep urban environments,” said Mark Murray, vice president of sales for GNSS and automotive at Quectel. “First and foremost, customers need to be able to find the vehicle and cities need to have the assurances that these eBikes and eScooters are operated in mutually agreed locations.”
UAV Navigation has developed a Visual Navigation System (VNS) that reduces the accumulated positional error during dead-reckoning navigation. The VNS leverages visual odometry techniques to determine the position and orientation of the aircraft by analyzing and processing the images captured by a camera installed on its underside.
Initial testing in real-time flight conditions has been a success, reports UAV Navigation. The system integrates well with the company’s flight-control solution to improve navigation in GNSS-denied environments.
Vector autopilot. (Photo: UAV Navigation)
UAV Navigation’s sensors are tolerant toward GNSS failures (typically, in GNSS-denied scenarios) and can operate in dead-reckoning mode without compromising flight safety. However, a prolonged GNSS failure can lead to a significant navigation drift, and this is where the VNS comes in.
The VNS system includes a simple belly-mounted camera and image processing computer. Images from the camera are processed by a lightweight onboard computer, translating them into a relative change in the aircraft position. This information can be combined with the inertial sensors to reduce the overall drift to < 1% of the distance traveled, eliminating any drift associated with time.
Combined with the Vector autopilot, the VNS components provide a complete and robust autonomous flight control and navigation solution.
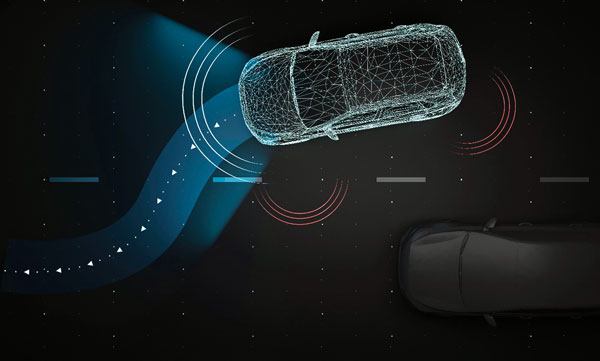
The ZED-F9K module is designed to keep cars in their lanes. (Photo: u-blox)
The new u‑blox ZED-F9K GNSS and dead-reckoning module is designed to bring continuous lane accurate positioning to challenging urban environments.
The module offers both high-precision multi-band GNSS and inertial sensors. It combines the latest generation of GNSS receiver technology, signal processing algorithms and correction services to deliver down to decimeter-level accuracy within seconds, addressing the evolving needs of advanced driver-assistance systems (ADAS) and automated driving markets.
The ZED-F9K builds on the u‑blox F9 technology platform. Compatibility with GNSS correction services further improves positioning accuracy by compensating ionospheric and other errors.
The real-time kinematic (RTK) receiver module receives GNSS signals from all orbiting GNSS constellations. The greater number of visible satellites improves positioning performance in partially obstructed conditions, while increased satellite signals delivers faster convergence times when signals are interrupted.
Inertial sensors integrated into the module constantly monitor changes in the moving vehicle’s trajectory and continue to deliver lane accurate positioning when satellite signals are partially or completely obstructed, as is the case when the vehicle is in parking garages, tunnels, urban canyons or forested areas.
When satellite signals become available again, the module combines inertial sensor data with GNSS signals to deliver fast convergence times and high availability of the decimeter-level solution.
The result of this combination of the latest developments in GNSS technology, correction services and inertial sensing is a tenfold increase in positioning performance over standard precision solutions, according to u-blox.
By robustly providing lane accurate position information, the ZED‑F9K meets the needs of ADAS and autonomous driving applications, as well as head units and advanced navigation systems. The module’s accuracy and low latency also makes it suitable for automotive OEMs and Tier 1 automakers developing V2X (vehicle-to-everything) communication systems. By continuously sharing their location with other traffic participants, V2X systems contribute to increasing overall road safety and reducing traffic congestion.
“We designed the ZED-F9K to be a turnkey high-precision GNSS solution that caters to the needs of today’s and tomorrow’s connected cars,” said Alex Ngi, product manager, product strategy for dead reckoning, u‑blox. “The ZED-F9K is unique in that it integrates a multitude of technologies, from the GNSS receiver to the inertial measurement unit and relevant dead reckoning algorithms into a single device for which we can ensure performance throughout the customer product development cycle.”
The module was introduced at the Electronica 2018 show, held Nov. 13-16 in Munich, Germany.
As the latest addition to Quectel’s GNSS portfolio, L26-DR is a concurrent multi-GNSS receiver module embedded with dead-reckoning solution, which greatly improves the positioning accuracy and speed while simplifying customer designs, the company said.
The dead-reckoning capability ensures the module delivers the highest performance positioning solution available, even when GNSS signal is absent or compromised, the company said.
Equipped with six-axis sensor MEMs and a powerful GNSS core, the module provides high sensitivity, fast GNSS signal acquisition and tracking with low system integration effort.
Moreover, the built-in low-noise amplifier offers the module with improved RF sensitivity and exceptional acquisition and tracking performances even in weak signal areas.
L26-DR is able to acquire and track any mix of GPS, GLONASS, BeiDou, Galileo and QZSS signals, which allows accurate navigation in harsh environments such as urban canyons, the company added. Compared with using GPS only, enabling multiple GNSS systems generally increases the number of visible satellites, reduces the time to first fix and improves positioning accuracy, especially when driving in rough urban environments.
Designed for automotive and industrial applications, the L26-DR comes in an ultra-compact size of 12.2 × 16.0 × 2.3 millimeters. The compact GNSS module also supports other precise positioning technologies, including differential GPS (RTCM) and SBAS (WAAS/EGNOS/MSAS/GAGAN).
According to the company, engineering samples of Quectel L26-DR will be available in December.
u‑blox has rolled out the u-blox F9 technology platform, which was designed to deliver high-precision positioning solutions for mass market industrial and automotive applications.
The platform combines multi-band GNSS technology with dead-reckoning, high-precision algorithms, and compatibility with a variety of GNSS correction data services, to achieve precision down to the centimeter level.
u‑blox F9 paves the way for the next generation of high precision navigation, augmented reality, and unmanned vehicles, the company said.
The u-blox F9 platform will underpin the next wave of u‑blox positioning modules targeting mass market industrial and automotive applications. It uses GNSS signals in multiple frequency bands (L1/L2/L5) to correct positioning errors caused by the ionosphere and deliver fast time to first fix (Fast TTFF).
Its ability to receive signals from all GNSS constellations (GPS, GLONASS, Galileo, Beidou) further improves performance by increasing the number of satellites visible at any given time. Stand-alone u‑blox F9 solutions robustly achieve meter-level accuracy.
To achieve centimeter-level accuracy, u‑blox F9 offers optional on-chip real-time knematic (RTK) technology. In addition to offering an open interface to legacy GNSS correction service providers, it supports the main GNSS correction services, bringing RTK high-precision positioning to the mass market.
“High precision is the next frontier in positioning for mass markets, with countless applications in need of a robust and scalable high precision positioning solution. u‑blox F9 provides the hardware and integrated software components to address these needs,” said Daniel Ammann, executive director of positioning product development at u-blox.
Optimized for low power consumption, the u‑blox F9 platform sets a high standard for security with built-in jamming and spoofing detection systems that protect against intentional and unintentional interference. Dead-reckoning technology based on inertial sensors extends high-precision performance to otherwise challenging urban environments.
Automotive applications of the technology include lane-level navigation for head-up displays and vehicular infotainment systems as well as for vehicle-to-everything (V2X) communication, a prerequisite for highly automated and fully autonomous vehicles.
In the industrial realm, u‑blox F9 will enable mass adoption of commercial unmanned vehicle applications including drones and ground vehicles such as heavy trucks or robotic lawnmowers.
The u‑blox F9 platform’s technology will be showcased at Embedded World in Nuremberg, Germany from Feb. 27-March 1 at Booth #3-139. Product samples will be available later in the year.