(fFrom left) Congressman LoBiondo, UrsaNav CEO Chuck Schue and Harris Division President Pam Drew. (hoto Credit: Andrei Grebnev, UrsaNav)
As of June 19, eLoran is on the air in the United States. The low-frequency signal emanates from a single station, a former U.S. Coast Guard Loran Unit in Wildwood, N.J., which sports a 625-foot signal mast that has been out of action for five years. The signal is receivable at distances of up to 1,000 miles.
The facility began generating eLoran pulses at the press of a command button by Congressman Frank LoBiondo (R, N.J). Present for the ceremonial start of a 12-month demonstration and research program under the aegis of the Department of Homeland Security were project participants Charles Schue, CEO of UrsaNav; Pam Drew, president of Harris Information Systems; and Dana Goward, president of the Resilient Navigation and Timing Foundation.
Brief remarks delivered at the turn-on collectively made the key points that:
GPS services are essential to national and economic security, yet are vulnerable to disruption.
The eLoran navigation and communications signal has features that are complementary to GPS, making it difficult to disrupt; further, it could be an important part of enabling UAVs to fly safely in our airspace.
The U.S. Federal Radionavigation Plan cites not being critically dependent upon a single system for positioning, navigation, and timing as a national policy objective. The plan specifically identifies eLoran testing as an important step toward reaching that objective.
The two engineering companies, UrsaNav, a supplier of eLoran technology, equipment, and services, and Harris (which recently acquired Exelis), provide funding and technology for the tests supported by the U.S. Coast Guard, Department of Defense, Department of Homeland Security and other federal agencies under a Cooperative Research and Development Agreement (CRADA) announced in May.
The team will evaluate eLoran as a potential complementary system to GPS, exploring the capabilities and use methods of eLoran in depth to identify all strengths, capacities, and potential vulnerabilities of the technology. One goal of the CRADA is to reduce the size, weight, cost, power needs and other aspects of Loran, similar to what has evolved with GPS.
“This is a phoenix arriving. We have the opportunity to add 2015 technology to the older idea,” said Schue of UrsaNav, once Coast Guard commanding officer at the former Loran station. “A prudent mariner always has two systems to navigate.”
Dana Goward, also a retired Coast Guardsman whose non-profit Resilient Navigation and Timing Foundation is working on the project, stated that eLoran can attain positioning accuracy of six meters or better.
“We will explore many places eLoran can be deployed where GPS isn’t available such as deep canyons, through buildings, in foliage and under water,” added Harris Corp.’s Drew. “We’re involved with unmanned aerial drones, and eLoran could be key. There are applications for civilian and military uses.”
In this GPS World exclusive video, Admiral Thad Allen, former commandant of the U.S. Coast Guard, discusses PNT alternatives to GPS for navigation, including eLoran and the activation this week of the signal on the eLoran tower in New Jersey.
eLoran in Europe
Matters have moved a little further along in Europe. In 2013, the General Lighthouse Authorities of the UK & Ireland (GLA) established prototype eLoran Initial Operating Capability (IOC) in the United Kingdom, where eLoran now delivers PNT data at the 10-meter level from a network of high-power, low frequency, terrestrial transmitters.
“To get high accuracy from eLoran requires accurate calibration of Additional Secondary Factor (ASF) through measurement,” according to paper delivered at the Institute of Navigation’s 2015 Pacific PNT meeting. “Can eLoran Deliver Resilient PNT?” was authored by Nick Ward, Chris Hargreaves, Paul Williams, and Martin Bransby of the GLA.
The older Loran-C system suffered from significant positioning bias errors due to a number of radio frequency signal propagation delay factors, they write. “The Primary Factor (PF) is due to the signal travelling slower in air than free-space, the Secondary Factor (SF) is due to the presence of the Earth’s surface and the electrical properties of the oceans. Additional Secondary Factor (ASF) is due to the additional electrical resistance encountered by non-seawater terrain, land, mountains, deserts, and so on. PF and SF can be modeled, but to get high accuracy from eLoran requires accurate calibration of ASF through measurement.
“To do this,” they continue, “ASF surveying and mapping has been conducted along the port approach channels at Aberdeen; along the Firth of Forth; Middlesbrough; Hull and the Humber Estuary Traffic Separation Scheme (TSS); Harwich and Felixstowe; The ports of London, Medway and the approaches past the London Array wind-farm and also through the Dover Straits.
“To complement these services, seven differential-Loran (DLoran) Reference-Stations, one located close to each of these survey areas have been established. These stations monitor the time of arrival of the received eLoran signals, and generate differential-corrections that are broadcast via the Anthorn Loran Data Channel (LDC), to account for temporal variations in these ASF maps.
“Making use of these ASF maps, combined with the locally-produced differential corrections, can allow a maritime user of eLoran IOC to obtain position accuracy of the order of 10m (95%), within a radius of 30 to 50 km of the DLoran reference station.”
eLoran can deliver Resilient PNT and this has been demonstrated on several vessels.
Seamless handover from primary (GPS) to secondary (eLoran) positioning source has been successfully implemented.
Surveying and mapping of ASF has been carried out for several major ports and the required levels of performance demonstrated.
DLoran reference stations to correct for short-term, temporal variations have been installed and commissioned.
Good levels of performance have also been demonstrated for coastal voyage phase away from the ASF surveyed areas.
eDLoran in Rotterdam. The July 2014 issue of GPS World presented a cover story showing results of a newer version, enhanced differential Loran (eDLoran), yielding position accuracies of approximately 5 meters.
Potential GNSS Back-up Improves to GPS-Level Accuracy
A new enhanced differential Loran system demonstrates 5-meter accuracy not achievable by the current DLoran system, and requires less expensive reference stations. A prototype tested in Rotterdam’s Europort area uses standard mobile telecom networks and the Internet to reduce correction data latency — a key source of error — by one to two orders of magnitude.
By Durk van Willigen, René Kellenbach, Cees Dekker, and Wim van Buuren
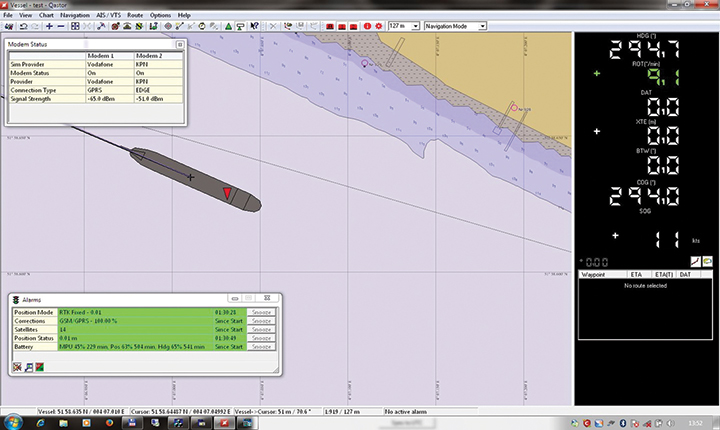
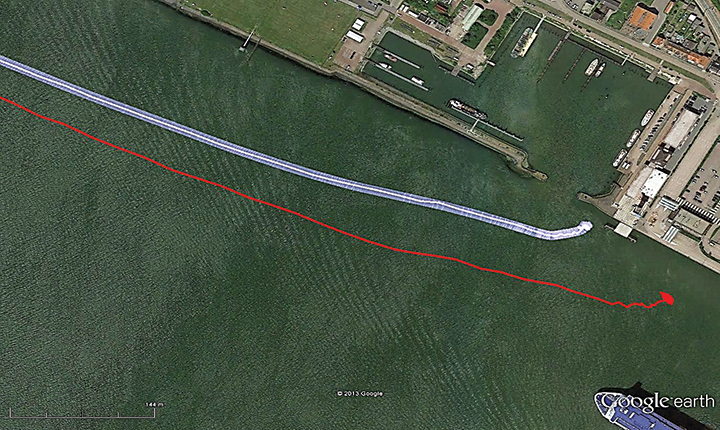
Figure 12. The large ship symbol (grey) is derived from the GPS-RTK receiver of the Rotterdam pilots. The width of the ship symbol is 10 meters and the speed-over-ground was 11 kts. The red triangle is generated by the eDLoran receiver and remains between the required ± 5 meter limits for eDLoran.Figure 13. The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 meters giving the required ± 5 meter limits of eDLoran. The white line is output from the eDLoran receiver which stays within the borders of the 10 meter wide transparent blue line.
The GLA authors from the UK give a perspective on the Rotterdam project, as follows:
“A compatible system (eDLoran) has been developed for operation by ships’ pilots on the Europort approach to the Port of Rotterdam.
“However, Loran is a regional system dependent on international collaboration. The 9 transmitters in northern Europe are operated by Denmark, France, Germany, Norway and the UK.
“Both Norway and France have declared an intention to cease Loran transmissions at the end of 2015. Moreover, France intends to dismantle its Loran infrastructure in 2016. Arrangements for the commercial operation of the infrastructure are being investigated, but this depends on some form of regional agreement. The European Union appears to have no policy for resilient PNT, the European Radio Navigation Plan having twice been drafted but never published. The view seems to bee that the introduction of Galileo will achieve resilient PNT, which it will not.”
And Elsewhere
South Korea is implementing a national eLoran service, and it is understood that similar plans are being considered in Russia and China.
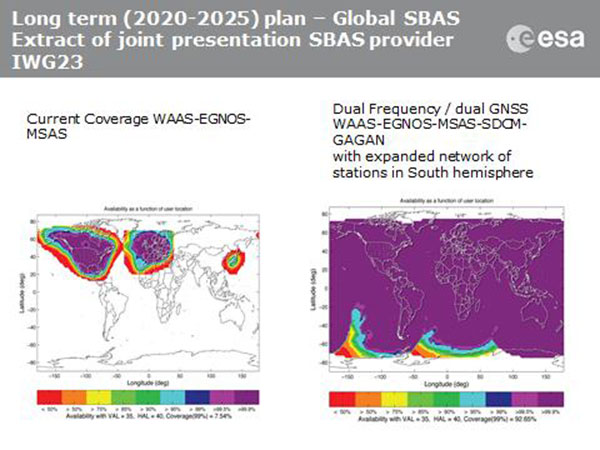
Current coverage (left) of WAAS, EGNOS and MSAS; long-term 2020–2025 (right) plan for dual-frequency, dual-GNSS WAAS-EGNOS-MSAS-SDCM-GAGAN.
SBAS Agree to Common Message
Aircraft navigation and safety will benefit from enhanced, reliable satellite navigation signals on a seamless basis across much of the world in the 2020–2025 timeframe. The 28th Satellite-based Augmentation Systems Interoperability Working Group (IWG) came to agreement on standardization of satellite-based augmentation systems (SBAS) in a meeting hosted by the European Space Agency in early April. The group planned a shift from reliance exclusively on GPS to a multi-constellation design employing Galileo, BeiDou and GLONASS after 2020.
The agreement centers around a message definition for a new secondary SBAS channel — to be known as L5, along with the current L1 — for second-generation SBAS systems, which will utilize dual-frequency multi-constellation signals, greatly increasing the accuracy of navigation systems available to airliners by largely eliminating ionospheric errors. Plans also call for an expanded network of stations in the Southern Hemisphere. The IWG document must now be accepted by the official international SBAS standardization bodies: the International Civil Aviation Organisation, the U.S. Radio Technical Commission for Aeronautics (RTCA) and the European Organisation for Civil Aviation Equipment.
The meeting also reported on the state of development of the other global SBAS systems. Along with the four operational systems — the U.S. WAAS, European EGNOS, Japan’s Multi-functional Satellite Augmentation System (MSAS) and India’s GAGAN (GPS and geo-augmented navigation system) — these comprise South Korea’s KASS, China’s Beidou SBAS, Russia’s System for Differential Corrections and Monitoring (SDCM) and the West African Agency for Aerial Navigation Safety in Africa and Madagascar (ASECNA) SBAS.
UAV Integration into Airspace
The Federal Aviation Administration (FAA) announced two new initiatives related to unmanned aircraft systems (UAS) at the Association for Unmanned Vehicle Systems International (AUVSI) Unmanned Systems 2015 conference in Atlanta, Ga., in early May.
FAA Administrator Michael Huertatold a large gathering of national journalists, “The unmanned aircraft industry is changing faster than any segment in the aircraft industry. A new project to harness that energy, the Pathfinder program, is partnering with three leading U.S. companies to expand unmanned aircraft operations in the United States.” The FAA is working with industry partners on three focus areas:
CNN will research visual line of sight (LOS) operations for newsgathering in urban areas. CNN will continue working with Georgia Tech University to improve newsgathering for all organizations.
PrecisionHawk will investigate agricultural operations for rural areas, flying outside LOS.
BNSF Railway, second-largest freight railroad network in North America, will undertake inspection of rail infrastructure, also beyond visual LOS.
Huerta said that the partners, collectively, “are trying to push the envelope, what can we accommodate safely and what can we learn from that.We’ll test a little, learn a little, then test some more. How do we see a staged implementation? To integrate unmanned aircraft, but to do it safely. We’re trying to push the edges of what we can allow, working with partners who have specific uses and resources.”
As to a timeframe to reach new UAV regulations, he replied, “I can’t comment a lot on the rule itself, but it’s fair to say that in the rulemaking comment process [closed on April 24], we received more than 4,500 comments. It’s too early to say how those comments will shape the final rulemaking.
“Assessment will be done in the coming months, perhaps by the end of the year, but that’s an aggressive timetable. That’s not accomplished in six months, nor should it take a million years.”
New Airbus EGNOS-Capable
The new Airbus A350 airliner, now entering service, comes fitted with EGNOS. The EGNOS system is being adopted by European airports to enable satellite-guided landing approaches. The A350’s Satellite Landing System allows pilots to perform precision-landing approaches guided by EGNOS or its U.S. equivalent, WAAS. The capability offers vertical landing guidance down to a minimum of 60 miles.
New Galileo Satellite on the Air
Monitoring by researchers at the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt, or DLR) indicates that one of the Galileo full-operational-capability (FOC) satellites launched on March 27 has begun transmitting standard L-band signals using pseudorandom-noise-code identifier 22.
The first E1 and E5 signals from GSAT0204, also known as FOC-FM4 and Galileo 8 and as NORAD object 40545, were received at an International GNSS Service Multi-GNSS Experiment tracking station in Windhoek, Namibia, at about 11:32 UTC May 21. The satellite’s signals were subsequently tracked by a station in Wettzell, Germany, and then by others.
The signals will be set unhealthy for use until satellite commissioning is completed.
News item courtesy of CANSPACE Listserv.
Euroship Gets eLoran as Backup
Container ship in port.
Ship management company EuroShip Services Ltd. has installed eLoran as a backup to GPS to ensure the safety of its vessels operating off the coast of the United Kingdom.
The trial installation may lead to implementation across the full fleet of16 vessels managed by Euroship, working routes in Northern Europe. The land-based radio navigation system is intended to seamlessly take over in the event of a GPS outage. EuroShip plans to simulate GPS outages to test eLoran provision of position, navigation and timing data automatically.
New GPS III RFP
The U.S. Air Force (USAF) has released a draft Request for Proposal for GPS III Launch Services, encompassing launch vehicle production, mission integration and launch operations.USAF reintroduces competition into the Evolved Expendable Launch Vehicle (EELV) program after more than a decade.
GPS III is the first of nine launches the Air Force intends to competebetween now and 2017, followed by 25 more from 2018 to 2022.
The 2014 Federal Radionavigation Plan, just released from the U.S. Department of Transportation, touches on funding for the Nationwide Differential GPS and the use of eLoran as a precision timing alternative.
The plan is signed by the Secretaries of Defense, Transportation and Homeland Security, and released by the DOT Office of the Assistant Secretary for Research and Technology. A PDF of the document has been posted to the NAVCEN’s website.
Nationwide Differential GPS (NDGPS). The nationwide differential GPS (NDGPS) service augments GPS by providing increased accuracy and integrity using land-based reference stations to transmit correction messages over radiobeacon frequencies. The service has been implemented through agreements among federal agencies including the Coast Guard, DOT and the Army Corps of Engineers, but a decision has not yet been made on funding beyond FY2016:
“The Department of Homeland Security, in coordination with the Department of Transportation, is analyzing the future requirements for the NDGPS to support investment decisions beyond Fiscal Year (FY) 2016. Future investment decisions might include maintaining NDGPS as currently configured, decommissioning NDGPS as currently configured, or developing alternate uses for the NDGPS infrastructure. Contributing factors to these decisions are: (1) the U.S. Coast Guard change in policy to allow aids to navigation (ATON) to be positioned with a GPS receiver using Receiver Autonomous Integrity Monitoring (RAIM), and to allow USCG navigation in all waters using the WAAS receiver; (2) limited availability of consumer grade NDGPS receivers; (3) no USCG DGPS carriage requirement on any vessel within U.S. territorial waters; (4) the Presidential Directive turning off GPS SA; (5) continuing GPS modernization; and (6) the Federal Railroad Administration’s determination that neither NDGPS, nor High Accuracy NDGPS, are requirements for the successful implementation of Positive Train Control.”
eLoran for Timing. eLoran is mentioned in the plan only briefly, in the following excerpt about precision timing alternatives:
“For precise timing applications, chip-scale atomic clocks are now available from at least one company, and others have active research and development programs in the United States and abroad. The U.S. Coast Guard has established a Cooperative Research and Development Agreement to assess a high-power wireless alternative for providing precise time using U.S. government facilities such as mothballed Loran-C sites, upgraded to eLoran capability. If successful, this effort would offer another solution suitable for integration with GPS, or use as an independent complement to GPS, that could together provide highly available and precise timing for many applications.”
Exelis, UrsaNav, the Department of Homeland Security’s Science and Technology Directorate (DHS S&T), and the U.S. Coast Guard have entered into a cooperative research and development agreement (CRADA) for testing and demonstration at former Loran-C sites.
The team will evaluate eLoran as a potential complementary system to GPS. The capabilities and potential utilization methods of eLoran will be explored in depth to identify all strengths, capacities, and potential vulnerabilities of the technology.
The sites are the legacy ground-based radio navigation infrastructure of the decommissioned Loran-C service that could be retained and upgraded to provide eLoran low frequency service.
Under the CRADA, Exelis will use the former Loran-C assets to put eLoran signals in space for research, test and demonstration of the ability of eLoran to meet precise positioning, navigation and timing (PNT) requirements of government and privately-owned critical infrastructure. The first station Exelis will broadcast from is located in Wildwood, N.J. The broadcast will provide a usable signal at a range up to 1,000 miles.
“eLoran is an ideal technology to complement GPS for critical, resilient and assured PNT,” said Ed Sayadian, vice president of Civil & Aerospace Systems for Exelis. “eLoran is a difficult to disrupt technology that offers PNT and wide area broadcast data capabilities indoors, in underground locations and other GPS-denied environments.”
“A preponderance of government, academic, and industry reports have concluded that eLoran is the best independent, multi-modal solution to provide assured PNT as a complement to GPS,” said Chuck Schue, president and CEO of UrsaNav.
Exelis and UrsaNav have entered into this CRADA because they believe that low frequency signals, such as eLORAN, operate independently of GPS signals and can provide alternative timing, either standalone, or as a component of a PNT service. Exelis also believes that as a result of its wealth of experience in its PNT portfolio, that there are many civil and defense applications that require precise time and/or position in GPS-denied environments. Examples include radio frequency interference, both intentional and unintentional; signal attenuation from heavy forest canopy, terrain or buildings; and indoor and underground locations.
Ship management company EuroShip Services Ltd. has installed eLoran as a backup to GPS to ensure the safety of its vessels operating off the coast of the United Kingdom.
The trial installation may lead to implementation across the full fleet of 16 vessels managed by Euroship, working routes in Northern Europe. The land-based radio navigation system is intended to seamlessly take over in the event of a GPS outage. EuroShip plans to simulate GPS outages to test eLoran provision of position, navigation and timing data automatically.
Euroship Services is one of the first ship managers to trial eLoran as a back-up to its GNSS. The company manages vessels owned by Cobelfret. They are mostly shortsea vessels, operating in and out of port, frequently in congested waters and with bridge teams that rely heavily on bridge systems for situational awareness.
Euroship managing director Frank Davies told Lloyd’s List that the company has so far been impressed with the first trial system on one of the company’s vessels. He said that with the company’s vessels entering and exiting large European ports, crews have even noticed distorted GPS signals while going under bridges.
A bi-partisan group of legislators led by Congressman John Garamendi (D-Calif.) has introduced a bill that would require the U.S. Secretary of Defense to establish a backup for GPS within three years using eLoran.
The National Positioning, Navigation, and Timing Resilience and Security Act of 2015, H.R. 1678, was co-sponsored by Congressmen Duncan Hunter (R-Calif.), Peter DeFazio (D-Ore.), and Frank LoBiondo (R-N.J). Garamendi is the ranking member of the House Transportation and uInfrastructure Subcommittee on the Coast Guard and Maritime Transportation.
H.R. 1678 would require the secretary of defense, in coordination with the commandant of the Coast Guard and the secretary of transportation, to establish and sustain a reliable, land-based positioning and navigation system that will complement and backup America’s GPS for military and civilian uses by using eLoran.
eLoran is the government’s existing and underused long-range navigation system infrastructure. The backup system would step in when GPS signals are corrupted, degraded, unreliable, or otherwise unavailable. A terrestrial-based system, eLoran wouldn’t be affected by atmospheric interruptions such as solar storms, or jamming or spoofing aimed at GPS.
The bill directs the secretary of defense to incorporate the expertise and contributions of the private sector to quickly establish system architecture, as well as build and operate the system.
“GPS is much more than a LCD screen on your dashboard. It’s a technology used for much of our nation’s critical infrastructure and by almost every major industry in America, as well as the military, law enforcement, and first responders,” Garamendi said in a press release. “We are increasingly reliant on the precision, navigation, and timing services that GPS provides. From land navigation on cell phones to a timing source for our national infrastructure, we need a reliable backup system to GPS.”
Garamendi said the bill would make the nation’s geopositioning infrastructure more resilient to “threats both natural and nefarious.” “A backup system could also reach places that GPS currently cannot, such as inside many buildings. This would help first responders and law enforcement more effectively protect the public,” he added.
Other members of Congress are expected to sign on as co-sponsors after Congress returns from its spring recess, according to Dana A. Goward, president and executive director, Resilient Navigation and Timing Foundation.
The eLoran PNT system would use enhanced long-range signals (eLoran) from 19 towers around the country, each with approximately a 1,000-mile range providing overlapping fields from which a device can derive its location. The back-up system would use the remaining Loran infrastructure and provide a secure and reliable cybersecurity insurance policy, said the press release.
The U.S. atomic clock, accurate to one second in 300 million years, also serves as the base timing source for this backup GPS capability. This exceeds the timing needs of modern cell phones, creating an infrastructure backbone that is prepared to handle the evolution of consumer and industry electronic communications in the years ahead, the press release said.
The bill sets out numerous requirements for the system, saying that it shall:
Be wireless, terrestrial, and wide area
Provide a precise, high-power 100 kilohertz signal
Be resilient and extremely difficult to disrupt or degrade
Be able to penetrate underground and inside buildings
Take full advantage of existing, unused Loran infrastructure
Work in concert with and complement any other similar positioning, navigation and timing systems, including eLoran.
Since 2004, the federal government has recognized that the absence of a reliable backup system for GPS is a glaring economic and security threat to the United States, and has reaffirmed its interest in developing an eLoran as a reliable, land-based backup for GPS signals, the press release said.
In January, the United States Army began soliciting information for eLoran receivers for the warfighter, either stand-alone or integrated with GPS, for use in Army and other Department of Defense maritime, aviation, or vehicular platforms, and for position and timing.
The United Kingdom began using eLoran in October 2014 to protect its shipping lanes, which carry 95 percent of UK trade, in case of GPS signal loss.
The United States Army is soliciting information for eLoran receivers for the warfighter, either stand-alone or integrated with GPS.
The Jan. 14 Request for Information (RFI) provides an outline for the potential use of the receivers in Army and other Department of Defense (DoD) maritime, aviation, or vehicular platforms and for position and timing purposes.
“As part of the Assured Positioning, Navigation and Timing (APNT), program effort, the Army is investigating the potential benefits from utilizing eLORAN ‘signals of opportunity’ to aid in developing PNT solutions for the warfighter. Thus, the Army is interested in leveraging the recent technology development efforts in the industry mainly for adding eLoran capabilities into Army APNT solutions,” the RFI reads.
Primary technical areas the Army is interested in include the receiver specifications; its use for maritime, aviation, vehicles, and timing; SWaP-C considerations for an integrated GPS and eLoran receiver; potential benefits of one-way messaging capabilities using the eLORAN data channel; signal tracking where GPS is unavailable (indoors, under water, in urban environments); and how quickly a demonstration could be held.
The assumption is for an order quantity of 50,000 units after a five-year development effort. The Army hopes to determine industry interest in developing such a receiver if the DOD “were to consider eLoran as a PNT source/signal of opportunity.”
Report on the 14th meeting of the National Space-based PNT Advisory Board in Washington, D.C., held December 10-11, 2014.
By Ron Hatch
Ron Hatch
The December meeting of the PNT Advisory Board meeting brought forth important developments and proposals for the protection of GPS as part of the U.S. critical national infrastructure. A separate presentation made by speakers from the National Telecommunications and Information Administration (NTIA) and the Federal Communications Commission (FCC), concerning possible limitations on the use of signals from other GNSS, generated some controversy, alarm, and extensive follow-on discussion by industry, users, and other concerned parties.
Critical Infrastructure. Perhaps the most important presentation was that of Brad Parkinson, the acting chair, in his recap of the recommendations to be made by the Advisory Board to the PNT EXCOM.
The first recommendation was a reiteration of the Advisory Board opinion that the GPS be designated as one of the “critical infrastructures” of the United States. This opinion was based upon the fact that 14 of the existing designated critical infrastructures involves the use of GPS. The feeling was that such a designation would enhance the attention focused upon ensuring GPS reliability.
A second recommendation was that a comprehensive threat assessment to GPS operation be generated that can be used to assess its vulnerabilities. The remaining recommendations to the EXCOM were based upon the results of studies by the two working groups that were presented next.
The two working groups of the advisory board, specifically the “Assured Availability” and the “Economic Value of PNT” working groups, gave the next set of presentations. The Assured Availability working group was split into three sub-groups. The three aspects addressed were to “Protect,” “Toughen,” and “Augment.” The Protect working group recommended action to encourage the reversal of European initiatives to authorize pseudolites that broadcast within the GNSS L1 frequency band. Since such pseudolites would constitute authorized interference to standard GNSS receivers, it was recommended that our State Department encourage a reconsideration of the pseudolite proposals and that they be constrained to operate on a frequency outside the L1 frequency band.
The Toughen working group looked at a number of measures by which GNSS receivers could be improved to better withstand intentional and unintentional interference. Phased array antennas, inertial aiding and various software tracking improvements were discussed. An invited presentation by Gary McGraw of Rockwell addressed some of these issues particularly from a military perspective. An additional invited presentation upon the requirements for precise time-keeping in trading of financial transactions was presented by Andrew Bach.
The Augment working group discussed a number of ways in which the GNSS capabilities could be augmented. Prior recommendations that eLoran should be maintained as a backup was again strongly recommended. In addition, the ability to track other GNSS satellites in addition to GPS satellites was encouraged, even though it was recommended that special precautions and automated checks needed to be implemented in the light of the system failures that have been noted with the GLONASS satellites. A very interesting invited presentation by Robert Lutwak of the Defense Advanced Research Projects Agency (DARPA) described the continuing progress toward higher precision inertial sensors.
The second working group, the Economic Value of PNT, reported on firmed up plans to strengthen the existing studies of the economic value of PNT by engaging the economists resident within the various cabinet departments within the EXCOM to which the Advisory Board reports. The detailed plans were given in a presentation by Irv Leveson that outlined the plans for “A Comprehensive Quantitative Economic Assessment of GPS.”
It is not my intention to slight any of the other presentations, but I felt two of the remaining presentations were very important. Specifically, the presentation by Karen Van Dyke on Department of Transportation plans regarding “Adjacent L-Band Compatibility and GPS Signal Monitoring” was very encouraging. Among other items, it indicates that adjacent band-power limits will be carefully analyzed and tested to ensure that all existing applications of GPS will not be harmed.
FCC on International Signal Use. The second presentation that I felt was very important was by Paige Atkins of the National Telecommunications and Information Administration (NTIA) and Ronald Repasi of the Federal Communications Commission (FCC). Their presentation was titled “NTIA/FCC Spectrum Management Perspectives.” The presentation covered the background and intent of the various authorizing legislation. There were, however, some disturbing comments made.
Specifically, the item on the slide about National Space Policy that had a major bullet: “Guidance to all departments and agencies – ‘maintain and enchance’ space-based PNT systems. To this end the U.S. shall (among other things)…” There were two sub-bullets.
The first addressed GPS protection as a critical infrastructure component. The second sub-bullet stated “Foreign PNT services ‘may be used to augment and strengthen the resiliency of GPS.’” The verbal transcript is not yet available, but it seemed to me that Ron Repasi minimized this statement by indicating that resilience was subject to interpretation.
The real alarm was in his following comments during the question-and-answer discussion, where he indicated that the use of GLONASS within U.S.-based receivers was not authorized and that, therefore, the frequency band they used was not necessarily subject to protection. In addition, it was indicated that three years ago, procedures were developed whereby one could apply for authorization to the use the GLONASS signals. To date, Ron Reposi indicated that no organization had applied for authorization to use GLONASS, and that therefore it was currently illegal to use it.
Significant discussion was generated by the above, both following the presentation and the next day in a recap. From the discussion, it appears that a March 2011 regulation outlining the requirements for authorization of receiving “Earth stations” is being interpreted by the FCC as requirements for authorization of GLONASS receivers.
[Editor’s note: The process for securing a waiver of FCC regulations requiring authorization to receive international RNSS satellite signals was identified in an FCC Public Notice released in 2011. This process is initiated by National RNSS System providers, which have the satellite information needed to secure a waiver. Members of the GPS Innovation Alliance (GPSIA, www.gpsalliance.org, formerly the U.S. GPS Industry Council) have stated that they remain fully committed to producing multi-GNSS signal user equipment consistent with U.S. policy, and to working with the FCC and NTIA in considering these requests.]
In light of the multitude of GLONASS receivers already in use, including a number of U.S. government and agency receivers, the discussion was primarily on what should be done next. The decision taken was not to panic, but to bring the problem to the attention of the various government departments represented on the EXCOM and proceed with some caution.
The possibility was raised that NASA, in conjunction with the State Department and other interested parties, could seek a blanket authorization to use GLONASS within GPS receivers. This was discussed and presented as a possible way forward. Clearly, the issue is one that will be followed with great interest.
Bridge of the Galatea, a GLA vessel that carries a eLoran receiver and conducted tests of the new system. Photo: GLA
Back-up to Vulnerable GPS Signals Required for Busy Shipping Lanes
The General Lighthouse Authorities (GLAs) of the UK and Ireland announced October 31 the initial operational capability of UK maritime eLoran. Seven differential reference stations now provide additional position, navigation, and timing (PNT) information via low-frequency pulses to ships fitted with eLoran receivers. The service will help ensure they can navigate safely in the event of GPS failure in one of the busiest shipping regions in the world, with expected annual traffic of 200,000 vessels by 2020.
Ships carry 95 percent of UK trade, accounting for its strongly expressed concerns regarding GPS vulnerability to jamming and spoofing, and the leadership role it has taken in eLoran research and testing. The UK is the first country in the world to deploy the technology along its coastline, thronged with both passenger and cargo services. Deployment involved replacing the existing radio receiver equipment in two prototype reference stations at Dover and Harwich, and the creation of five new reference stations in the Thames, Humber, Middlesbrough, and Firth of Forth and Aberdeen in Scotland, on the North Sea where oil-laden vessels come from deep-sea drilling rigs.
Entirely independent of GPS, eLoran can provide navigation information for vessels as well as the timing data necessary to maintain the power grid, cell phones, financial networks, and the Internet in the event of an outage. Unlike space-based navigation, eLoran signals can also reach inside buildings, underground, and underwater.
Captain Ian McNaught, deputy master of Trinity House, commented, “eLoran provides a signal around 1 million times more powerful than those from satellite signals, providing resilience from interference and attack. The achievement of initial operational capability for the system at Dover and along the east coast of the UK is a significant milestone, providing for improved safety aboard appropriately equipped vessels. The maritime industry would now benefit from the installation of eLoran receivers on more vessels to take advantage of improved navigational safety.”
“Telecoms, finance, energy, and other industries, which are subject to significant issues caused by the loss of timing signal provided by GPS, are recommended to take advantage of the enhanced reliability now available to address the over-dependence of key national infrastructure on vulnerable satellite systems,” McNaught said.
eLoran technology is based on longwave radio signals and is independent and complementary to GPS.
Several other nations are consulting with the UK GLAs on eLoran. South Korea wants to establish an eLoran alliance with the UK while it pursues its own rollout of differential eLoran reference stations and new eLoran transmitters based on the latest technology. In 2012, South Korea was the victim of a 16-day GPS jamming attack by North Korea.
Full operational capability covering all major UK ports is expected by 2019.
Galileo Roving High
The fifth Galileo navigation satellite, one of two left in the wrong orbit in August, made a series of November maneuvers as a prelude to its health being confirmed. The aim was to raise the lowest point of its orbit — its perigee — to reduce the radiation exposure from the Van Allen radiation belts surrounding Earth, as well as to put it into a more useful orbit for navigation purposes.
Should the two-week operation prove successful, the sixth Galileo satellite will follow the same route, according to the European Space Agency (ESA).
The Galileo pair, launched together on a Soyuz rocket on August 22, ended up in an elongated orbit traveling out to 25,900 kilometers (km) above Earth and back down to 13,713 km. The target orbit was a purely circular one at an altitude of 23,222 km. Also, the orbits are angled relative to the Equator less than originally planned.
The two satellites have only enough fuel to lift their altitude by about 4,000 km — insufficient to correct their orbits entirely. But the move will take the fifth satellite into a more circular orbit than before, with a higher perigee of 17,339 km.
“The new orbit will fly over the same location every 20 days,” said Daniel Navarro-Reyes, ESA Galileo mission analyst. “The standard Galileo repeat pattern is every 10 days, so achieving this will synchronize the ground track with the rest of the Galileo satellites.”
“In addition, from a user receiver point of view, the revised orbit will reduce the variation in signal levels, reduce the Doppler shift of the signal, and increase the satellite’s visibility,”Navarro-Reyes said. “For the satellite, reducing its radiation exposure in the Van Allen radiation belts will protect it from further exposure to charged particles. The orbit will also allow Galileo’s Earth Sensor to hold a stable direction for the satellite’s main antenna to point at Earth. Right now, when the satellite dips to its lowest point, Earth appears so large that the sensor is unusable. The satellite relies on gyroscopes alone, degrading its attitude precision.”
The recovery is being overseen from the Galileo Control Centre in Oberpfaffenhofen, Germany, with the assistance of ESA’s Space Operations Centre, ESOC, in Darmstadt, Germany. France’s CNES space agency is providing additional ground stations so that contact can be maintained with the satellite as needed, ESA said.
Welcome IIF-8
The U.S. Air Force launched the eighth GPS IIF satellite on October 29, aboard an Atlas V 401 rocket. With this new arrival on orbit, only four more Block IIF satellites remain to be placed aloft. Three are in storage awaiting launch, and one is in production.
The Boeing-built GPS IIF-8 (SVN-69/PRN-03) will replace SVN-51 in the E plane slot 1. SVN-51 will be re-phased from E1 to an auxiliary node at E7 somewhere around SVN-54 currently on station at E4, according to the Air Force Second Space Operations Squadron (2 SOPS).SVN-38/PRN-08 will be taken out of the operational constellation prior to SVN-69 payload initialization and sent to Launch, Anomaly Resolution and Disposal Operations (LADO).PRN-08 will be assigned initially to SVN-49 and set to test.
SVN-51 will remain in an auxiliary node once it completes its re-phase journey. The SVN-51 re-phase will take about six months after the initial burn occurs.
Potential GNSS Back-up Improves to GPS-Level Accuracy
A new enhanced differential Loran system demonstrates 5-meter accuracy not achievable by the current DLoran system, and requires less expensive reference stations. A prototype tested in Rotterdam’s Europort area uses standard mobile telecom networks and the Internet to reduce correction data latency — a key source of error — by one to two orders of magnitude.
By Durk van Willigen, René Kellenbach, Cees Dekker, and Wim van Buuren
For maritime applications, Loran is considered as the most promising backup for GNSS for situations where the use of navigation satellite signals is denied. For this reason, the Dutch Pilots’ Corporation askedReelektronika to investigate whether differential Loran could meet the Dutch Pilots’ 5-meter accuracy requirement for a harbor navigation system. This proved to be an enormous challenge, as preliminary tests showed that even 10 meters was difficult to achieve with differential Loran (DLoran) as promoted by Trinity House, the UK lighthouse authority. This led to a thorough renewed investigation of all possible error sources of a complete differential Loran system. The outcome of this research is very promising, as a couple of major error sources could be isolated. This made the complete system better understandable, so adequate countermeasures could be taken.
Loran History
The development of Loran-C started in the United States about fifty years ago. It is a terrestrial low-frequency (100 kHz) system organized as chains, each consisting of a master station with two or more secondary stations. Each station broadcasts in a strict time format series of 8 or 9 pulses of approximately 250 µs. The effective radiated power is in the range of 100 to 1,000 kW, depending on the required working range. These high powers are required by the high levels of atmospheric noise in the 100 kHz frequency band.
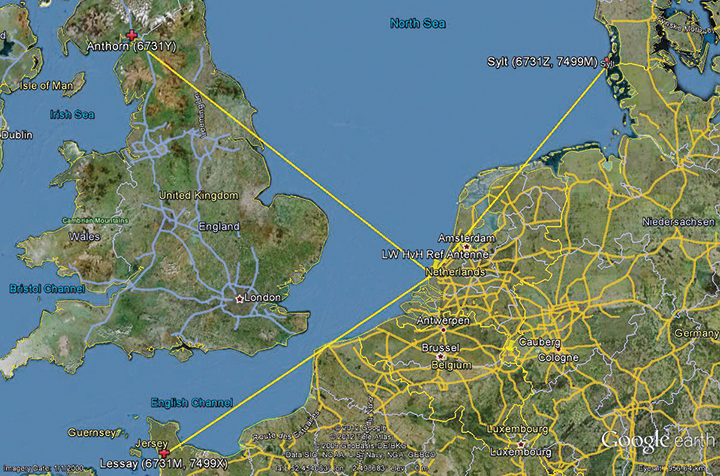
Figure 1 shows the test area of enhanced Differential Loran (eDLoran), using the Loran stations of Lessay (France), Sylt (Germany), and Anthorn (UK).
Figure 1. The Loran configuration in the test area of Europort.
Radiating such high-power pulses requires large vertical transmitting antennae of about 200 meters height (Figure 2). These high power levels have long been seen as a drawback of Loran-C. However, the upcoming GNSS interference risks changed this apparent drawback into an advantage, as jamming such high field strengths is hardly achievable unnoticed. Loran-C is, unfortunately, less accurate than GNSS but it is nearly impossible to jam over large areas. This is one of the major reasons that Loran gets so much renewed interest by all who face risks in life-critical and environment-critical applications of radio navigation.
Figure 2. Left, the antenna park of 13 masts of ≈200 meters at Anthorn, UK. Right, the 200-meter mast at Sylt, Germany.
Differential Loran
Standard Loran does not meet accuracy requirements for harbor entrance and approaches. The International Maritime Organization requires 10 meters (95 percent), which is at least 5 times more demanding than standard Loran can provide. So, differential techniques have been developed and implemented, which are comparable with differential GPS. Although the error sources of GPS and Loran are quite different, the major common error source in both systems is the lack of accurate propagation models.
Several years ago, the General Lighthouse Authorities (GLAs) of the UK and Ireland implemented Differential Loran (DLoran) in the test area around Harwich. DLoran is based on a Loran reference station in the area of interest which measures temporal deviations of the measured pseudoranges. These “errors” are then sent to the user receiver through the Eurofix Loran Data Channel. This technique strongly resembles that of differential GPS. Unfortunately, for a number of reasons it proved to be impossible to achieve absolute accuracies of better than 10 meters with DLoran.
This has led to a new research project to find a more accurate differential Loran technique. All possible error sources have been investigated again where possible, producing unexpected solutions regarding accuracy and cost.
Error Sources
The total position error of Loran depends on the accuracy in time of the high-power generated Loran pulses feeding the antenna, the stability of the physical phase center of the Loran transmitter antenna, stability of the tuning of the antenna circuit, the accuracy of the measured additional secondary phase factor stored in the Additional Secondary Factor (ASF)database, and the quality of the Loran receiver. ASF is the additional delay when Loran signals propagate over land with a varying conductivity. As the ASF data are not fixed but vary slightly over time, temporal de-correlation, differential techniques have been developed to counteract that effect. In standard DLoran systems, the differential corrections are sent to the user through the Eurofix data link. Particular error sources include:
Transmitter Timing Accuracy. A Loran transmitter sends about 100 pulses per second. Each station has three cesium clocks time-synchronized to Coordinated Universal Time (UTC) via a time-transfer network. A two-way satellite time-transfer system will make it simpler and more accurate.
Antenna Phase-Center Stability. Loran transmitter antennas are vertical towers approximately 200 meters high to provide vertical polarization. Its phase center, at the published position, does not move more than about 1 meter according to the station crew at Sylt.
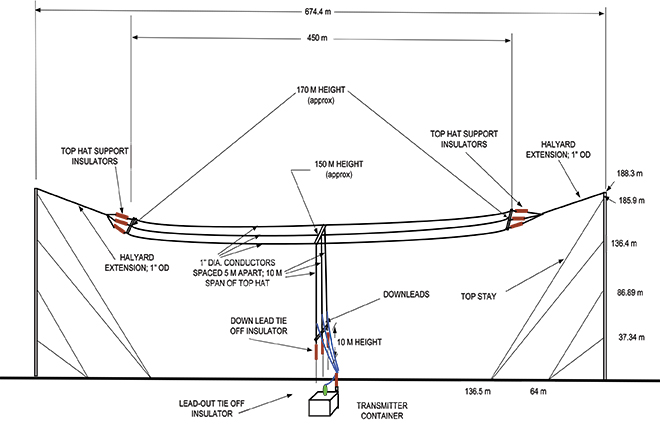
This situation is very different for a wire antenna as installed at the station at Anthorn in Northern England. The top-loaded wire antenna is installed between two towers 200 meters tall and separated by 675 meters (Figure 3). In stormy weather, the antenna position is not stable and does not continuously coincide within 1 meter of the published position of the antenna.
Figure 3. The enormous top-loaded Loran wire antenna at Anthorn. This type of antenna is not rigidly stable during storm. By courtesy of Babcock International Group.
ASF Data. The net travel time of the Loran signal from the transmitter to the receiver antenna is the sum of the propagation through the atmosphere (primary factor or PF), some extra delay due to traveling over seawater (secondary factor or SF), and finally ASF. The PF and SF are calculated from models, while the ASF must be measured. These calculations can only be accurate if the net travel time can be accurately determined and the distance between transmitter and receiver can be calculated with the help of GPS-RTK. The time stamps of the signal when leaving the antenna are not sufficiently accurate. The time stamps on the received signals are established by using a GPS-disciplined rubidium (Rb) clock. In conclusion, we cannot accurately measure and compute the absolute ASF values. All mentioned possible errors led to the use of differential techniques.
Differential Loran
As it is not possible to measure ASF data to sufficient accuracy, time-stamp errors at the transmitter can be circumvented by applying differential techniques over a limited area of interest. The receiver at the reference site and the rover receiver experience the same transmitter timing error, which makes it a common error and harmless in differential Loran. It is more difficult to cope with the offset of the Rb clocks at the reference and the rover sites, which is, unfortunately, not common-mode. Differential clock errors of a moving rover receiver may easily rise to 20 ns, equivalent to 6 meters. This type of error limits the achievable accuracy of an ASF data base.
The measured/calculated ASF data are due to weather effects on propagation slightly moving with time. That is the reason to use a reference receiver to measure these temporal variations and send these as AFS corrections to the rover receiver via the 30 bps Eurofix data link. Unfortunately, this rather slow data link introduces significant data latency, which turned out to be the source of significant differential Loran errors.
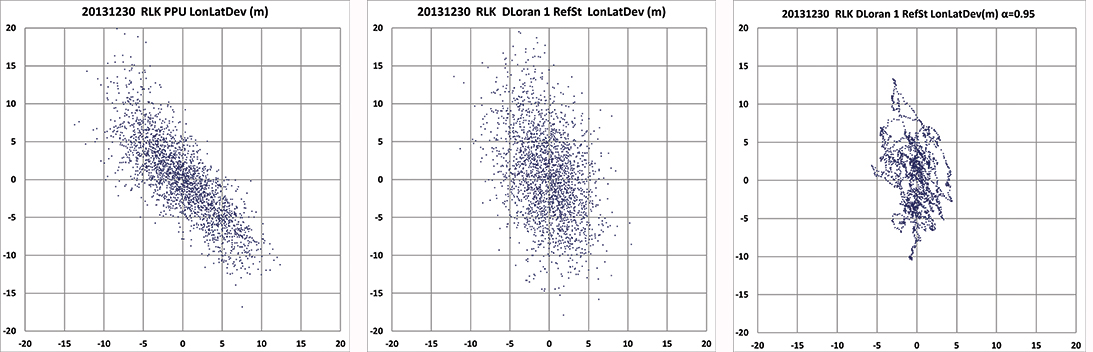
In the UK, many tests have been conducted to measure these ASF shifts and use the Eurofix data link for sending correction data to the user receiver. DLoran data are sent as pseudorange corrections per station. A complete set of DLoran correction data takes about 90 seconds. The UK plans to send correction data from multiple reference stations via a single Eurofix channel. The resulting very large data latency will preclude accuracies any better than 10 meters. The main reason of this conclusion was found by further analysis of measurements of the position of the rover receiver. These positions are shown as a scatter plot in Figure 4.
Figure 4. On the left the position deviation scatter plot at the rover receiver. The middle plot is the result after applying DLoran corrections from a reference station. The right plot of the same DLoran plot after being low-pass filtered indicating the slow moving of the phase center of the Anthorn transmitter. The axes are in meters.
The left-hand plot gives the position deviation of 2,500 independent measurements, where the scattering was thought to be caused by noise on the measurements. The middle plot is the result after being corrected by DLoran data with a 90-second data latency, which shows a somewhat modified form but still quite noisy plot. However, when the DLoran data were low-pass filtered, it appeared that often all separate measurements more or less formed lines, which would not happen with just atmospheric noise. Further, the scattering after filtering did not decrease much, which would happen if the disturbances were due to noise. See the right-hand plot in Figure 4.
This demonstrates that the source of the problem is the slow data rate through the Eurofix channel, in combination with the movements of the phase center of the transmitter antenna at Anthorn. Apparently, the solution had to be found in a much faster data link which could neither be offered by Eurofix (30 bps) nor by the U.S.-proposed OFDM technique with a data rate of approximately 1 kb/s. This unexpected result forced us to drastically change the concept of differential Loran to get much better accuracy results, as requested by the Rotterdam pilots.
Enhanced Differential Loran
The above mentioned difficulties with DLoran have led to a new concept of differential Loran which had to fulfil three important primary improvements. The first is a significant reduction in the latency of the data in the data channel; the second is that a large number of reference stations should be allowed to send correction data to the user without saturating the data channel. Finally, it is necessary to measure ASF data more accurately without being dependent on atomic clocks.
The simple conclusion was that Eurofix could not meet the first two improvements. As Eurofix is an invention of Delft University in the Netherlands, it was somewhat painful for the Dutch to admit that a much faster data link is absolutely needed to achieve a two-fold better differential Loran position accuracy. However, Eurofix is still the prime GNSS backup candidate for distributing accurate UTC over very large parts of Europe. Further, Eurofix has the capability to send short messages, which might be encrypted for secure communication purposes that might then form a terrestrial backup for Galileo PRS.
Finally, the third improvement to generate more accurate ASF data cannot be found on a pseudorange method but has to be established on position bases.
Instead of using the Eurofix channel, eDLoran uses the public Global System for Mobile (GSM) network to send the differential corrections to users. eDLoran receivers therefore contain a simple modem for connection to the GSM network. The eDLoran reference stations are also connected to the Internet, which may be implemented via a cabled access or also via a GSM modem.
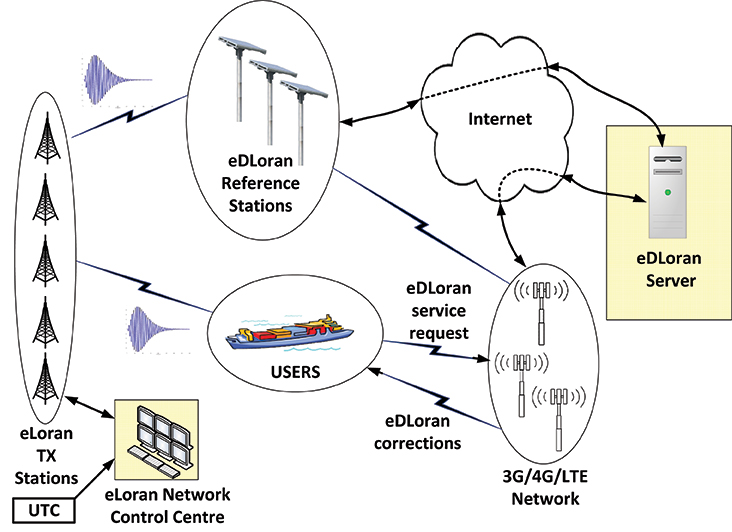
Fortunately, today many GSM networks are robust in respect of GPS outages. The eDLoran concept is quite simple and is shown in Figure 5.
Figure 5. Concept of eDLoran. By courtesy of Babcock International Group.
The eDLoran infrastructure is not connected with any Loran transmitter station and operates completely autonomously. An eDLoran reference station is connected to a central eDLoran server by its connection to the Internet.
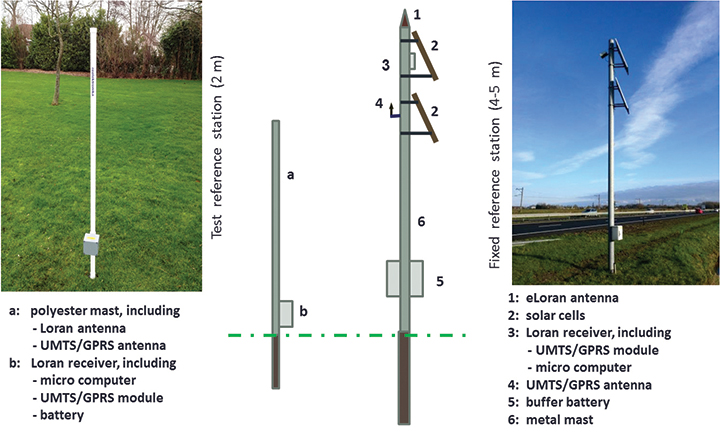
The measured positions of these reference receivers are processed in the eDLoran server, which returns the resulting correction data to the user, also via the Internet. Data latency will be not more than 2 seconds. The rover receiver starts the entire process by sending the raw position to the server, which will then return the optimal ASF database for that particular area. Corrections can be calculated by using data from multiple reference stations. Reference stations for eDLoran are small and consume not more than 10 Watts. Two types of reference stations are under development. A portable simple battery-powered version, not larger than 2 meters, can operate for 8 hours. This version is meant to do interference analysis on selected candidate locations. For a permanent installation, a continuously operating solar-powered unit is also under development. See Figure 6.
Figure 6. Concepts of a mini reference station (left) and a permanent eDLoran reference station.
It has been mentioned that measuring accurately the departure and arrival times of Loran pulses is difficult. It is however needed in order to work out the ASF data on the pseudorange measurement for each Loran station in view. Therefore, a DLoran ASF measurement receiver concept uses Rb clocks and is relatively large and power-hungry. With eDLoran, position offsets due to ASF effects are measured and an eDLoran reference server outputs position- instead of pseudorange-corrections. Measuring positions is much simpler and more accurate and can be done with standard miniature low-power eLoran receivers. No GPS-disciplined Rb clock is needed, and total costs are significantly lower. The gain in accuracy of this simpler ASF measurement receiver together with the very low data latency is one of the reasons that the resulting eDLoran position accuracy is now approximately 5 meters instead of 10 meters with DLoran.
eDLoran Results
We conducted real-life static and dynamic tests to demonstrate the capabilities of this new concept. The static tests were done in post-processing with logged data from Hook of Holland and at Reelektronika, about 40 kilometers to the east. Only standard eLoran receivers, mostly equipped with E-field antennae, were used, and no atomic clocks were applied. At Reelektronika ,we used two 2-meter mini-reference stations, while in Hook of Holland the Loran antenna was mounted on top of the 30-meter lighthouse. Dynamic tests were done on board of the MS Polaris, the new pilot-station vessel of the Dutch Pilots’ Corporation.
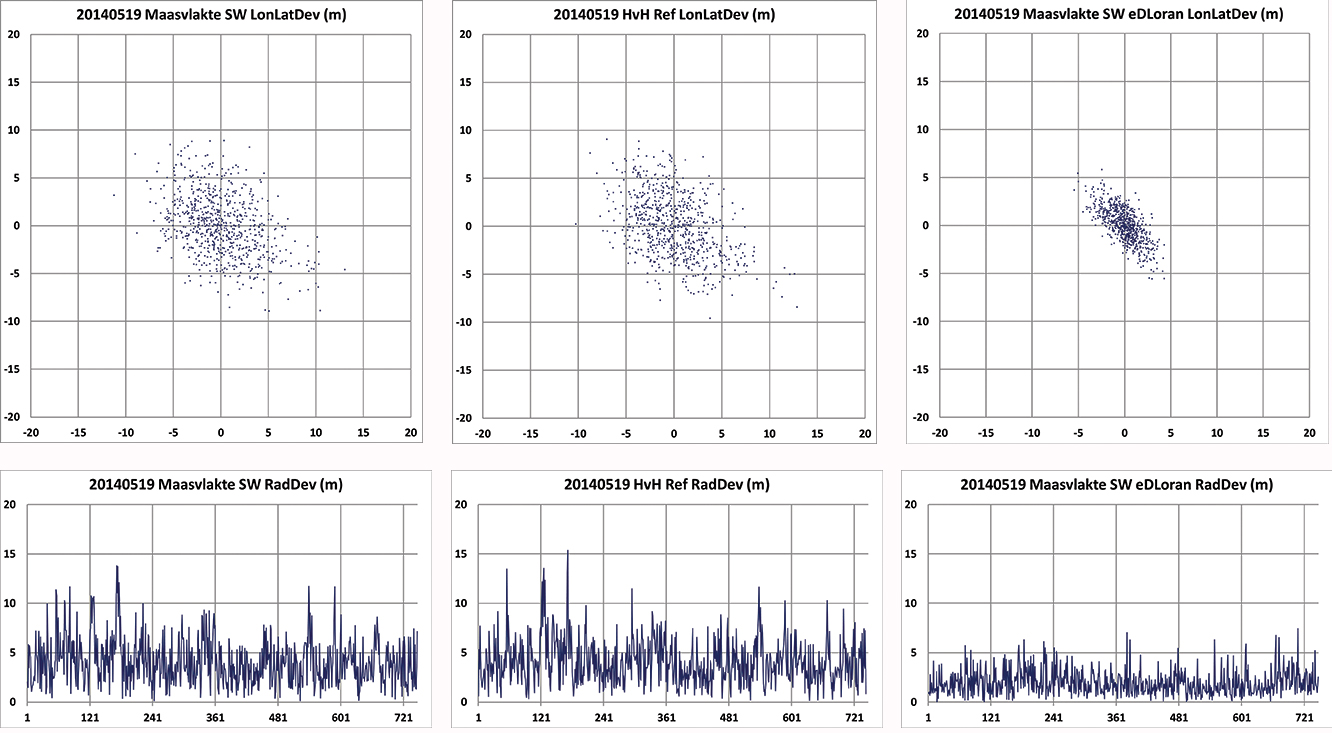
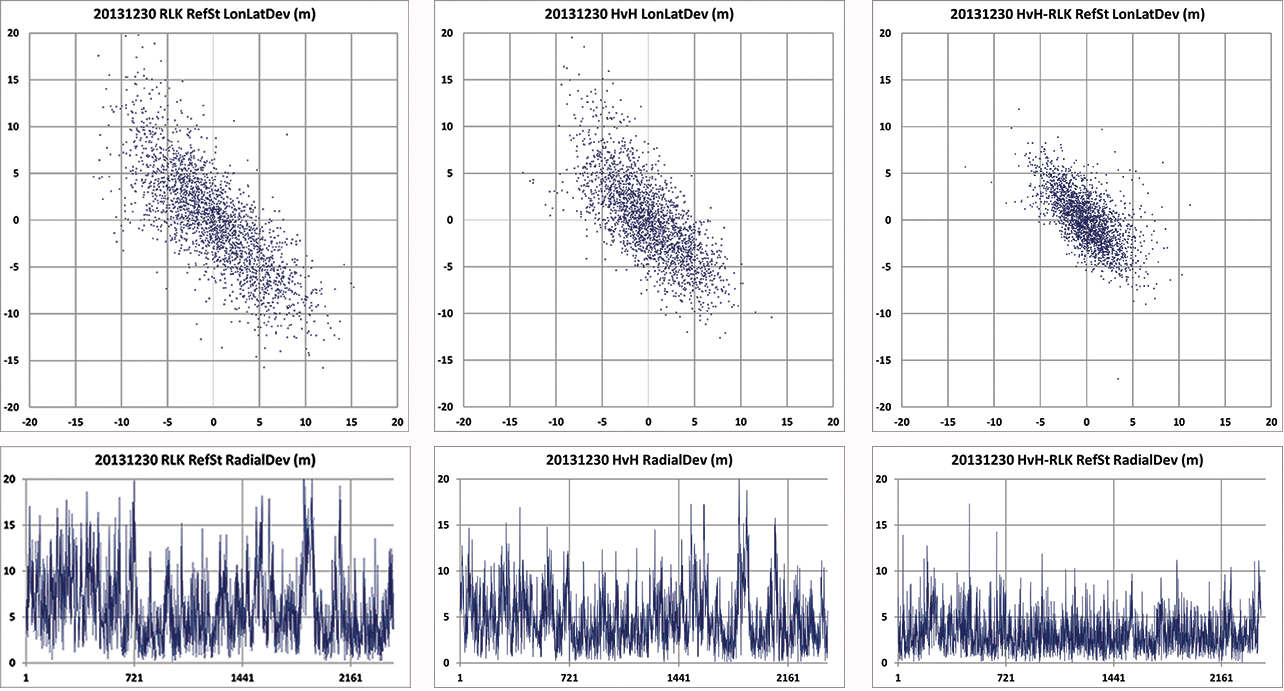
Static Tests. To give a realistic image of the resulting errors of eDLoran, the scatter plots in Figures 7 and 8 are depicted in the position domain. The radial errors are shown in the time domain where the horizontal axis gives the 5-second epochs. The left and the middle plot show the results of the rover and the reference receiver, respectively. The eDLoran plots on the right depict interesting results, as those variations in ASF are largely cancelled while the scattering is smaller than that of the measurements at the rover and the reference receiver, individually. The scattering at the two locations was apparently partly due to low-frequency disturbances, for example because of the moving phase center of the antenna at Anthorn, or instabilities in the time-control loops in the transmitters.
Figure 7. Position scatter plots in the upper row and radial error plots in the lower row of the user receiver on the Maasvlakte and the reference receiver at Hook of Holland. The right-hand column depicts the results for eDLoran. The two sites are separated by about 11 km. The horizontal axis shows the 5-second epochs.Figure 8. Position scatter plots in the upper row and radial error plots in the lower row of the receivers at Reelektronika and Hook of Holland. The right-hand column depicts the results for eDLoran. The two sites are separated by about 40 km. Some eDLoran accuracy degradation around events 250 and 500 may be due to local interference at Reelektronika.
Figure 7 shows the situation where the rover and the reference receiver were separated by 11 kilometers, while Figure 8 depicts the results when the rover receiver was at Reelektronika, more than 40 kilometers from the reference site at Hook of Holland.
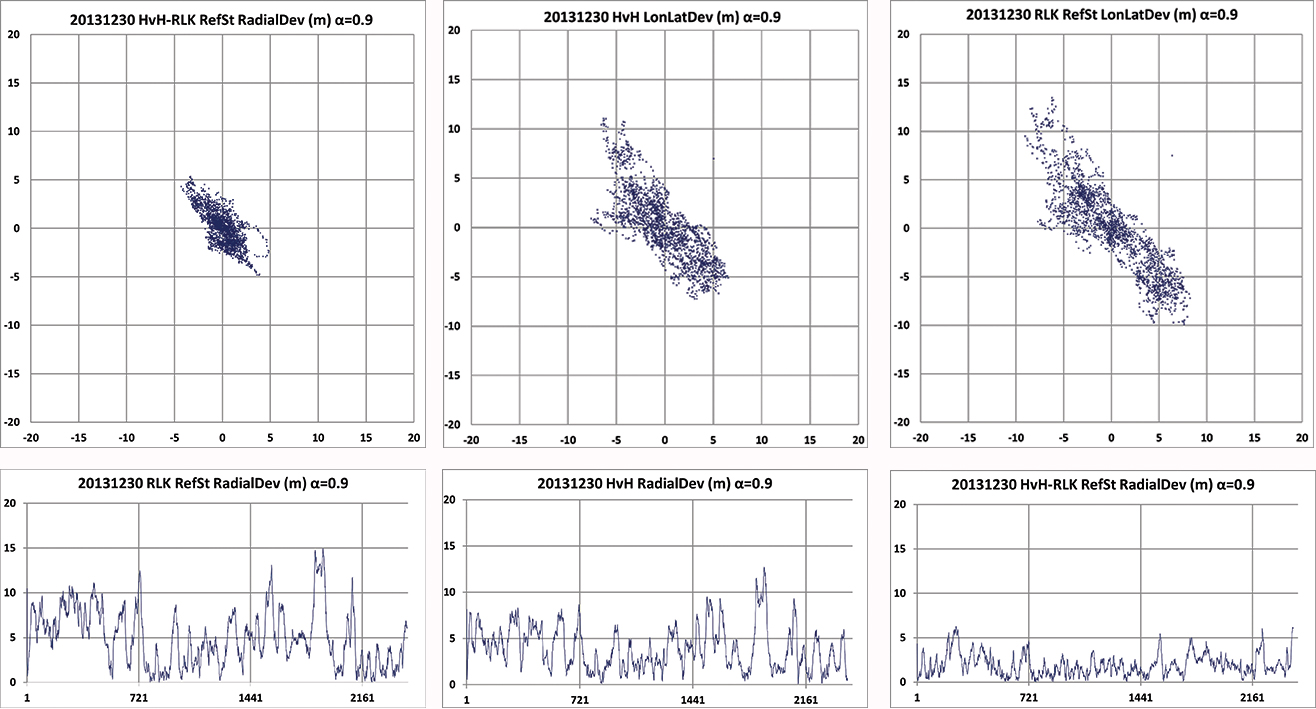
This effect of movement of the phase center of the transmitter antenna is further made visible by applying an alpha-tracker (α = 0.9) on the position data of both receivers, which have an update rate of 5 seconds. The lining-up of dots on some parts of the scatter plots in Figure 9 are believed to be due to swaying of the transmitter antenna. Due to the low-pass filtering, the disturbances now contain fewer high-frequency terms.
Investigating the radial error plots of Figure 9, it is remarkable that the large excursions at event 1880 largely cancelled. The disturbance at event 1880 might be caused by antenna movement at Anthorn, which is nearly perfectly cancelled by eDLoran.
Figure 9. Above plots are based on the same data as in Figure 8 but now after passing through an alpha tracker with α = 0.9. Note the correlation of the radial deviations around events 1800 in both 40 km separated receivers and the strong reduction in scattering.
Investigating the radial error plots of Figure 8 and 9, it is remarkable that the large excursions around epoch 1900 largely cancel, while this is not happening at epoch 250. There, some local interference might have been the cause. The disturbance at event 1900 might be caused by swaying of the Anthorn antenna which is then a common-mode error at both receivers and is therefore strongly reduced in the eDLoran plots.
Dynamic Tests. Dynamic testing on board the Polaris at sea (Figure 10) is somewhat more complex to do correctly. The eDLoran receiver was installed about 1 meter above the GPS-RTK reference receiver. In this way, the lever-arm problem of not installing the antennae of the two receivers at the same location was avoided. The next issue was measuring ASF position data, which should happen synchronously with the GPS measurements. Time synchronization can be achieved by using simple GPS receivers at both Loran receivers. Some months later, the eDLoran concept was tested by using the stored AFS data and using a Reelektronika eDLoran receiver as a portable pilot unit (PPU) which looks identical to the GPS-based units the Rotterdam pilots use, manufactured by AD Navigation in Norway.
Figure 10. Top right, the Pilot Station Vessel MS Polaris (80 meters) used to test eDLoran (photo copyright Loodswezen). Below is a complete eDLoran receiver with a ‘life-line’ connected to avoid losing the receiver by accident and to allow charging the internal batteries.Figure 11. Five test antennae on the MS Polaris. From left to right the ADNav Master Processing Unit, the ADNav Heading Unit, the ADNav Position Unit with the Reelektronika eDLoran receiver 1 meter above it and, finally, a second Reelektronika eDLoran receiver.
The results have been demonstrated to the harbor authorities in real-time on the laptop of the pilots on which the GPS-RTK and the eDLoran position were simultaneously shown. See Figure 12, where the large gray ship model represents the position and heading derived from GPS-RTK. The width of the ship model is 10 meters. The red triangle gives the eDLoran position; it remains within the borders of the ship symbol. For further demonstration purposes, the logged GPS-RTK data could also be plotted on a Google Earth map (Figure 13). The track was widened to 10 meters, as the accuracy requirements are 5 meters on either side of the track. The raw eLoran track is also shown, as well as the final white eDLoran track of unfiltered raw eDLoran data, which stays well within the 5-meter boundaries.
Figure 12. The large ship symbol (grey) is derived from the GPS-RTK receiver of the Rotterdam pilots. The width of the ship symbol is 10 meters and the speed-over-ground was 11 kts. The red triangle is generated by the eDLoran receiver and remains between the required ± 5 meter limits for eDLoran.Figure 13. The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 meters giving the required ± 5 meter limits of eDLoran. The white line is output from the eDLoran receiver which stays within the borders of the 10 meter wide transparent blue line.
During the sea trials, the eDLoran receiver was connected to the eDLoran server on land via a miniature GSM modem to the Internet. All differential data were read via this mobile link. The required data bandwidth is very low, approximately 150 bps per ship (client).
Conclusions
The outcome of this research opens some new and quite surprising possibilities for multiple applications:
eDLoran offers the best possible eLoran accuracy, as it does not suffer from unstable transmitter antennas, sub-optimal timing control of the transmitter station, and differential data latency.
There is no need to replace older Loran-C stations with eLoran transmitters; this potentially would save large amounts of money. Further savings may be obtained by containerizing the transmitter and operating the stations unmanned.
Installing eDLoran reference stations is fast, simple, and very cost-effective.
The Eurofix Loran Data Channel can be freed from a relatively large stream of DLoran data, which leaves the full data bandwidth available for UTC and short-message services over very large areas.
As there is no data channel bandwidth limitation, multiple reference stations can be installed, offering increased reliability and making the system more robust to terrorism and lightning damage.
Single or multiple eDLoran servers can be installed in a protected area. There is hardly a practical limit to the number of differential reference stations to serve.
The server selects the most optimal differential data based on the raw position of the user (client) and the available reference stations.
As there is no need for any Loran data channel, eDLoran can be installed in all locations where Loran or Chayka coverage and access to the Internet are available. Required data bandwidth is approximately 150 bps per user.
Standard eLoran receivers used on controlled trajectories (for example, pilots and ferries) collect position data when accurate DGNSS is available. The collected GNSS and eLoran data can be uploaded to the server to further refine the ASF data base. It is basically a self-learning system.
All eDLoran reference stations monitor the eLoran and GNSS positions to offer alarm services in case of GNSS jamming or spoofing.
Acknowledgments We are very grateful for the near-endless hospitality of the Rotterdam Pilots and especially the crew of the MS Polaris and the MS Markab. Without their help, we would not have obtained the eDLoran results presented here. During the days at sea, we learned how much experience and professionalism is needed to bring those extremely large vessels safely in the harbor of Rotterdam.
We thank Martin Rumens and Dave Kelleher of Babcock International Group for their valued comments and diagrams.
DURK VAN WILLIGEN is a retired professor of electronic systems for navigation at the Delft University of Technology. He is founder and president of Reelektronika B.V., and started the development of Eurofix in 1985. He received the Thurlow Navigation Award of the Institute of Navigation (U.S.) and the Gold Medal of the Royal Institute of Navigation (UK).
RENÉ KELLENBACH graduated from Delft University of Technology in electrical engineering. After joining Reelektronika as a systems engineer, he has been involved in designing hardware and software for radionavigation and radar systems.
CEES DEKKER graduated from the Delft University of Technology in electrical engineering. He worked previously at Philips Research Labs and now assists Reelektronika B.V. with the development of Loran systems and GPS-related projects, and information systems.
WIM VAN BUUREN is a licensed maritime pilot in Rotterdam who took the initiative to develop a backup positioning system for the approaches to Rotterdam. He has been involved in the design and development of the hardware and software of Portable Pilot Units on a national and European level since 2000.
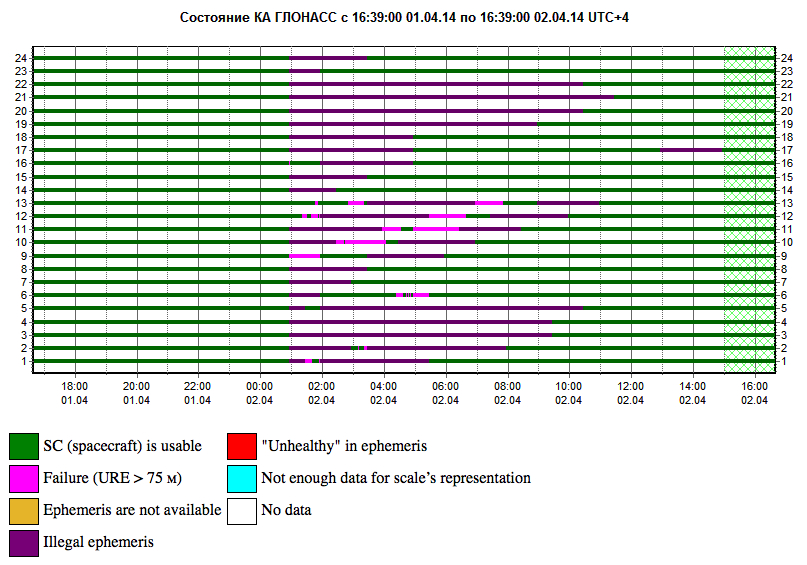
GLONASS PLOT from the Roscosmos GLONASS Information-Analytical Centre, showing the 12-hour outage, with full service eventually restored on April 2.
Two April Disruptions Furnish Fodder for Multi-GNSS Receivers and Alternative PNT
In an unprecedented total disruption of a fully operational GNSS constellation, all satellites in the Russian GLONASS broadcast corrupt information for 11 hours, from just past midnight until noon Russian time (UTC+4) on April 2 (or 5 p.m. on April 1 to 4 a.m. April 2, U.S. Eastern time). This rendered the system completely unusable to all worldwide GLONASS receivers. Full service was subsequently restored.
“Bad ephemerides were uploaded to satellites. Those bad ephemerides became active at 1:00 a.m. Moscow time,” reported one knowledgeable source. GLONASS navigation messages contain, as they do for every GNSS in orbit, ephemeris data used to calculate the position of each satellite in orbit, and information about the time and status of the entire satellite constellation (almanac); user receivers on the ground processed this data to compute their precise position.
The GLONASS fix could not take effect until each satellite in turn could be reset, during its pass over control stations in Russian territory, in the Northern Hemisphere, thus taking nearly 12 hours.
During the outage, CEO Neil Vancans of Altus Positioning Systems reported “We are currently experiencing calls from customers all over the world who are experiencing GLONASS ‘outages’ and we have advised customers to switch GLONASS tracking off on our receivers.”
Such a — possibly human, possibly computer-generated — error could conceivably occur with GPS, Galileo, or BeiDou. “Another reason to have backups,” mused Richard Langley of the University of New Brunswick. “And not just other GNSS.”
Trouble Chronolog. The constellation suffered a second failure two weeks later. On April 14, eight GLONASS satellites were simultaneously set unhealthy for about half an hour, meaning that most GLONASS or multi-constellation receivers would have ignored those satellites in positioning computations. In addition, one other satellite in the fleet was out of commission undergoing maintenance. This might have left too few healthy satellites to compute GLONASS-only receiver positions in some locations.
The two blackouts followed two other high-profile disasters: the destruction-upon-launch of three new GLONASS satellites in July 2013, and the Pacific drowning-upon-launch of three satellites in December 2010.
Internal Dialog. The semi-official Russian news daily Izvestia (“Truth”) reported that the loss of service was inconsequential for Russian users. Loose translation courtesy of Google:
“Temporary GLONASS failure has not led to tangible consequences for consumers of services because chip manufacturing exclusively with GLONASS for the mass market is practically nil: there are chips that work only with the GPS signals, and there are those that see both GPS and GLONASS.”
In other words, there are practically no mass-market devices, even in Russia, that use exclusively GLONASS.
“In any case, the failure of the entire system for a long period is a serious blow to the image of GLONASS, especially in a situation where Russia has made efforts to promote domestic navigation system to external markets. Plus in 2012, the Russian government officially promised to maintain the characteristics of the international community GLONASS at the proper level for 15 years.”
Industry View, Multi-GNSS. During the first outage, chip company Broadcom was conicidentally conducting multi-constellation receiver tests in Asia. Frank van Diggelen, the company’s chief GNSS scientist, stated, “We have definitive data to show how a multi-constellation receiver survives such an outage. Test data coincident with the GLONASS ephemeris disruption show how a GPS/GLONASS/QZSS/BeiDou receiver survives the complete disruption of one of the constellations.”
A Broadcom 47531receiver tracking GPS/GLONASS/QZSS/BeiDou signals simultaneously and using logic to analyze redundant measurements to check the validity of all measurements successfully identified and removed the bad GLONASS ephemeris, maintaining position continuity and accuracy. Another receiver under test at the same time, tracking only GPS and GLONASS, wandered significantly in its position reports.
Industry View, Back Up PNT. Calling it an “unprecedented and deeply worrying total disruption…[that] shook the industry,” Locata Corporation reiterated its call for redundant terrestrial systems to back up GNSS in the wake of the outage.
Nunzio Gambale, Locata CEO, said “We have been telling the industry for years that you cannot have a critically important capability like GPS without also having a backup! What is Plan B if the satellite systems fail? What replaces the space signal when there is a problem? This event should terrify every nation, government, and company that depends on navigation satellites for their business or, in some cases, their very lives.”
GNSS navigation and timing functions underpin the world’s banking systems, stock exchanges, digital TV and Internet, cell-phone networks, and, in some cases, the national electricity supply, Locata pointed out. GPS, in particular, plays a crucial role in transportation, shipping, and logistics, serving as the enabling technology for critical functions like air traffic control. Reliability is therefore not just important; it is essential across all applications.
“We ignore the possibility of these ‘Black Swan’ events at our own peril,” added Chris Rizos of the University of New South Wales.
eLoran Authorization in Progress
Russia’s April 1 GLONASS blackout occurred, ironically, only hours after the U.S. House of Representatives passed legislation to preserve infrastructure that could support a backup system for GPS that could be used for critical infrastructure and applications in the event of a similar disaster occurring in the United States.
The 2014 Coast Guard Authorization Act requires the Department of Homeland Security (DHS) to halt dismantling and disposal of infrastructure that could be used for a terrestrial system during times and in places where GPS is not available.
DHS had announced in 2008 that it would build such a backup system, but it never did so, and actually began dismantling, destroying, and divesting itself of Loran equipment and properties. The equipment, facilities, and sites could be used to implement a new generation eLoran system for GPS backup, among other applications. Despite strong recommendations to the contrary by its own panel of experts, the Obama administration, DHS, and the Coast Guard moved in 2009 to kill the Loran program.
Watchdogs. Congress has lately become more visibly concerned about the vulnerability of the nation’s space systems. The 2014 National Defense Authorization Act tasked the administration with reporting on how it was going to provide necessary national security capabilities when space systems were disrupted. More recently, Congressmen Duncan Hunter (Republican, California), chair of the House Coast Guard and Marine Transportation Subcommittee, held a hearing at which he expressed his concern that the nation has no backup for GPS. He also expressed his frustration with the Department of Homeland Security, reporting that “They said they need to do a study about their study.”
Congressman John Garamendi (Democrat, California), commented “GPS will go down one day. The question is, is there a backup?”
The legislation passed by the House authorizes DHS to partner with public or private entities to build a system that would not only back up GPS, but also work indoors, underground and underwater — all characteristics of long-wave Loran technology.
Resilient PNT. Dana Goward, president of the Resilient Navigation and Timing Foundation, said such a project would be relatively inexpensive. “If the existing equipment and infrastructure are preserved and reused, the system could be restored and put into operation for less than half the cost to dispose of it.”
“It isn’t an issue of money,” Goward continued. “It is a question of the government taking this problem seriously and acting on it.”
The foundation has as offered to partner with the government to build the system.
“Our government has known about this issue for a long time,” Goward said. “At least since 2001. And there has been a standing presidential direction to obtain backup capability since 2004. But for some reason, it hasn’t yet happened.”
The government’s official website about GPS (www.gps.gov) has recently updated its page on eLoran and Loran-C with a tracking log for Coast Guard and Maritime Transportation Act of 2014, which now goes to the Senate.
IRNSS’s Second of Seven
India’s Space Research Organisation launched a navigation satellite on April 4. IRNSS-1B is the second of seven that will comprise the first-generation Indian Regional Navigation Satellite System (IRNSS). It joins IRNSS-1A, already in orbit.
IRNSS will consist of three geostationary satellites and two pairs in inclined geosynchronous orbits. Each IRNSS satellite uses a rubidium-based atomic clock to keep time, transmitting signals on L and S-band frequencies at 1176.45 and 2492.028 megahertz respectively.
Lag in Recent GPS IIF’s Health Status
By Richard Langley
The GPS Block IIF satellite, IIF-5 or SVN64 (PRN30), launched on February 21, had not as of press time been set healthy. Typically, GPS satellites are checked out and made operational within about a month after launch.
The delay is due to an extended navigation test being performed by the GPS master control station. A navigation upload for SVN64 was performed in March with ephemeris and clock data as usual streching weeks in advance. However, unlike with operational satellites, no further updated uploads have been performed. The aging ephermis and clock data gradually becomes less and less accurate as time goes by, but should degrade gracefully.
Some observers will have noticed that the received navigation data from SNV64 changes infrequently. Currently, the navigation data changes once per day with an epoch of 13:00 GPS Time, unlike every two hours with operational satellites. And the data fit interval is 26 hours, compared to four hours.
The North Sea fairly boils with GNSS activity recently. Trials of the eLoran back-up for GNSS, Galileo maritime trials, Brad Parkinson’s Protect, Toughen, and Augment sermon at the European Navigation Conference in Rotterdam, and also at that conference, the dramatic release of news concerning an even newer Loran system, enhanced differential Loran, that not only backs up GNSS in the event of disruption or jamming, but delivers 5-meter accuracy in the process. Imagine that — the back-up matching the first team in performance!
Durk van Willigen, René Kellenbach, and Cees Dekker of the Dutch consulting firm Reelektronika, and Wim van Buuren of the Dutch Pilots’ Corporation authored the ENC presentation about enhanced differential Loran, with results that greatly — and pleasantly — surprised many in the audience. A full technical article by these authors, describing the equipment, methodology, and test results of eDLoran, will appear in the July issue of GPS World. This column delivers a brief summary of the highlights.
The new Loran project arose from the need of harbor pilots responsible for bringing large and super-large freight ships into dock. These pilots require GNSS-level accuracies of 5 meters for such work, and all parties concerned — pilots, captains, ship owners, harbor management — need some form of robustness, that is, back-up for the GNSS systems in case of jamming, unintentional interference, system failure, or other disruption.
As extensive research had established that 5-meter accuracy cannot be met by the currently tested DLoran system, which cannot get better than 10-meter accuracy. Reelektronika developed a new differential Loran system called enhanced differential Loran, or eDLoran. A full prototype eDLoran system was built and extensively tested in the Europort (Rotterdam) area. The tests achieved accuracies of 5 meters.
For maritime applications, eLoran is considered as the most promising backup for GNSS in case the use of satellite-based navigation signals is denied. The Dutch Pilots’ Corporation askedReelektronika to investigate whether differential Loran could meet the pilots’ 5-meter accuracy requirement for a harbor navigation. This proved to be an enormous challenge as preliminary tests showed that even 10 meters was difficult to achieve with differential Loran (DLoran) as promoted by the UK’s Trinity House/General Lighthouse Authority (see item below about Harwich UK tests by GLA and ACCESS). The challenge had led to a thorough investigation of all possible error sources of a complete differential Loran system.
Differential techniques developed and implemented for Loran are comparable with differential GPS. Although the error sources of GPS and Loran are quite different, the major common error source in both systems is the lack of accurate propagation models.
This led to a new research project to find a more accurate differential Loran technique. All possible error sources have been investigated again where possible, which resulted in some unexpected results regarding accuracies and costs.
Enhanced Differential Loran: eDLoran
The new concept of differential Loran had to fulfill two important primary improvements. The first is a significant reduction in the latency of the data in the data channel; the second is that a large number of reference stations should be capable of receiving the data channel, without saturating the data channel. The simple conclusion was that Eurofix could not meet these two improvements. However, Eurofix is still the prime GNSS backup candidate for distributing accurate UTC over very large parts of Europe. Further, Eurofix has the capability to send short messages that might be encrypted for secure communication purposes which might then form a terrestrial backup, for example, Galileo PRS.
Instead of using the Eurofix channel, eDLoran uses the public mobile GSM (Global System for Mobile) network to send the differential corrections to users. eDLoran receivers therefore contain a simple modem for connection to the GSM network. The eDLoran reference stations are also connected to the Internet which may be implemented via a cabled access or also via a GSM modem.Fortunately, today many GSM networks are robust in respect of GPS outages.
The eDLoran infrastructure is not connected with any eLoran transmitter station and operates completely autonomously. An eDLoran reference station is connected to a central eDLoran server by its connection to the network.
eDLoran Results
Both static and dynamic tests have been carried out. Here, only the final result of the dynamic test is presented. For full details on both sets of tests, see the upcoming full-length technical article in the July issue of GPS World magazine.
The results have been demonstrated to the harbor authorities in real-time on the laptop of the pilots on which the GPS-RTK and the eDLoran position were simultaneously shown. The logged GPS-RTK data is plotted on a Google Earth map shown in the accompanying figure. The track was widened to 10 metres as the accuracy requirements are 5 metres on either side of the track. The raw eLoran track is also shown, as well as the final white eDLoran track.
The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 metres giving the required ± 5 metre limits of eDLoran. The white line is output from the eDLoran receiver which stays within the borders of the 10-meter-wide transparent blue line.
Conclusions
The outcome of the research opens some new and quite surprising possibilities for multiple applications. Only a few of the authors’ conclusions appear here:
eDLoran offers the best possible eLoran accuracy as it does not suffer from swaying wire antennas, sub-optimal timing control of the transmitter station and differential data latency.
There is no need to replace older Loran-C stations with eLoran transmitters saving large amounts of money. The existing Loran stations have a proven reliability track record. Further savings may be obtained by containerising the transmitter and operating the stations unmanned.
Installing eDLoran reference stations is fast, simple and very cost effective.
As there is no data channel bandwidth limitation, multiple reference stations can be installed which offers increased reliability and makes the system more robust against terrorism and lightning damage.
A single or multiple eDLoran servers can be installed in a protected area. There is hardly a practical limit in the number of differential reference stations to serve.
To round out our North Sea reporting, here is other recent news:
Enhanced Loran
In March, the UK General Lighthouse Authority (GLA) and Accessibility for Shipping, Efficiency Advantages and Sustainability (ACCSEA) announced that on several excursions aboard the THV Galatea out of Harwich, UK, they successfully demonstrated a prototype resilient positioning, navigation and timing (PNT) system using enhanced Loran (eLoran) technology to automatically and seamlessly step in to transmit mission-critical data in the event of GPS loss or failure. (Note that in the preceding Reelektronika section of this column, the GLA enhanced Loran is referred to as differential Loran, while the Dutch system is called enhanced differential Loran.)
Building on two previous trials conducted by the GLA in 2008 and 2010 which investigated the impact of GPS service denial, this latest demonstration is the first time that an automatic and seamless solution has been demonstrated in a real-world scenario. The prototype system was integrated into the bridge of the vessel and monitored the performance of independent PNT sources in order to provide the ‘best’ available. As such, when GPS was deliberately jammed, the system switched automatically to eLoran and provided eLoran-derived PNT information to the connected bridge systems, allowing them to maintain operation and enabling the mariner to continue to navigate safely and efficiently.
ACCSEAS is taking advantage of the availability of the prototype eLoran transmitter at Anthorn and eight other Loran stations around the North Sea Region, but few vessels currently have receivers. Most recently, in January 2013, a differential Loran station was installed at Dover, UK, one of the busiest shipping lanes in the world, enabling mariners to obtain port approach level accuracies using eLoran within this area; and a receiver was fitted on a P&O Ferries vessel. The successful demonstration of the prototype resilient PNT system is a significant step towards gaining traction for the technology in the shipping industry worldwide.
By 2014, eLoran Initial Operational Capability is expected in seven major ports along the East Coast of the UK, with full operational capability covering all major ports expected by 2019.
Galileo Maritime Trials
Results are being processed from the first Galileo maritime trials outside of mainland Europe. The long-range, high-latitude testing spanned the North Sea aboard Belgian frigate Leopold I-F930, carrying multiple Galileo receivers for both Galileo’s public Open Service (OS) and secure Public Regulated Service (PRS).
Protect, Toughen, Augment GNSS
“What can we do to reduce the vulnerability [of GPS] and ensure that the expectations of the public are going to be met?” asked Dr. Bradford Parkinson as he opened his keynote presentation at the European Navigation Conference, ENC-GNSS 2014 in Rotterdam, The Netherlands.
Parkinson went through his 61-slide, 50-minute briefing on what he called “PTA” — Protect, Toughen, and Augment — a proposal concerning not only GPS but PNT systems globally. An article by Parkinson based on this talk will highlight the special 25th Anniversary edition of GPS World, to appear in conjunction with this year’s July issue. A brief outline appears here.