Researchers at the University of Tehran have developed indigenous software for providing real-time corrections for networks, precise positioning service and online processing of GNSS observations.
According to variousnews reports, the software is a modern, secure, and intelligent platform for processing observations from global positioning satellites, including GPS, Galileo, BeiDou and GLONASS.
Developed as a practical tool for surveyors, engineers, researchers and organizations in the field of satellite data monitoring, the software is intended to replace imported software and reduce dependence on foreign technologies. It has been tested by the network of permanent stations of the National Iranian South Oil Company.
The system processes observations using static, PPK, PPP and SPP methods, as well as observation quality control and enables the implementation of various positioning methods and real-time monitoring of ionospheric and tropospheric effects.
It supports all GNSS data types and can connect to reference stations in both client and server modes. It supports all existing and future GNSS signals and can handle at least 50 permanent stations and 200 users simultaneously. It also provides phase ambiguity resolution for baselines up to 70 kilometers.
Other technical features include providing a relative planimetric accuracy of 2 cm and a height accuracy of 3 cm using the static method with a maximum setup time of 15 minutes, a relative planimetric accuracy of 4 cm and a height accuracy of 5 cm using PPK and NRTK methods, and delivering corrections with a maximum permissible latency of 0.5 seconds.
The software has the capability to connect to reference stations through serial, TCP, and UDP ports, supports NTRIP protocol versions 1 and 2, displays an online map with a Google Map-like background, allows for viewing the location, status and information of CORS stations and active users, and enables generation of KML outputs.
Mobile mapping is helping accelerate the progression of some of the most difficult engineering challenges on the planet, including those around autonomous driving and advanced surveying techniques, such as lidar.
The complexity of those challenges means that the outputs from a mobile mapping inertial navigation system (INS) must be as accurate as possible. A high-performing INS will make the most of any available GNSS signals, with the aim of providing centimeter-level accuracy even in areas where GNSS performs poorly, for instance in urban canyons. It also offers important data on pitch, roll and heading, which maintains the integrity of survey data even as the vehicle moves across large areas.
With such a wide variety of INS devices on the market, it can be difficult to narrow down the best option. It is important to establish criteria that will aid in evaluating the different INS propositions out there for mobile mapping projects.
Image: OxTS
1) How tightly integrated are the inertial measurement unit (IMU) and GNSS data?
INS is an essential element in providing accurate location data in as many environments as possible. Therefore, it is important to know how effectively the data from the IMU supports the GNSS data. In technical terms, this means evaluating whether the sensors are tightly integrated at all, and if so, how well.
The reason GNSS struggles in urban canyons and under tree canopies is that it is unable to get the six satellite signals necessary for a real-time kinematic (RTK) lock. In this situation, the GNSS will give readings that may be incorrect, as it is essentially trying to solve an equation without having all the numbers.
A tightly integrated GNSS and INS data stream will select the most reliable signals and use those to determine the position of the vehicle. If the data streams are not tightly integrated, then the INS’ ability to counteract GNSS issues is limited. Without accurate positioning, data scans will lose accuracy and even become completely incoherent the longer the user scans — making them unreliable at best, and unusable at worst.
2) Trading off accuracy and cost
Although accuracy is vital in mobile mapping, some INS devices will provide data that is far more accurate than the given job requires. Because greater accuracy equals greater cost, users may be paying more than necessary.
With that being said, the scale of accuracy and cost is not linear. An INS half the price of the most expensive one on the market will not be half as accurate. Look at each offering carefully to see what it includes and decide what level of accuracy and features are vital to the task. Eliminating unnecessary levels of precision or additional software features that are not needed is an effective way to make some savings.
3) How rugged is the device?
Mobile mapping vehicles will likely be out in the dry, wet, hot, cold, mud and snow. These vehicles will almost certainly be used consistently for long periods of time. Thus, it is essential to know that none of these conditions will stop the INS from working at peak effectiveness. Look for the IP rating (IP65 is essential for being weatherproof and protecting against shocks and dust) and ask what the average lifespan of the product is.
Image: OxTS
4) Can the device be properly calibrated?
Any INS is only as good as its calibration. Without calibration, the sensors in any INS can become misaligned and therefore provide inaccurate readings. Talk to vendors about their calibration processes — do they work to a nationally recognized standard of calibration like ISO 17025? Do their calibrations account for variations in temperature or humidity?
It is also worth considering how often sensors need recalibration. Recalibration is a chargeable service from most vendors, meaning the more the device needs recalibrating, the more the user will have to pay. This could also lead to delays if the user must send units abroad to have them recalibrated.
Rokubun has launched JASON, a satellite navigation service for accurate geolocation. With JASON, users can achieve highly accurate geolocation without a base station, Rokubun said.
JASON works under a “freemium” pricing model, making it possible to use it for free or to subscribe to monthly professional or premium plans.
JASON is a post-processed kinematic (PPK) satellite positioning service in the cloud that allows users to achieve highly accurate geolocation by uploading GPS/GNSS campaign data. JASON will try to obtain the best possible positioning solution on a best-effort basis. It will use PPK with the nearest GNSS continuously operating reference station (CORS) in the service’s database or with he user’s own provided station if no close CORS are available, or precise point positioning. The data can be processed interactively by using the Rokubun website or automating the workflow via the Rokubun API.
JASON also features a free data-conversion service for GNSS raw measurements.The service is compatible with Argonaut, u-blox, Septentrio, Android GnssLogger and any receiver able to export industry standard RINEX v2 or v3 file formats.
According to Rokubun’s CEO Xavier Banqué-Casanovas, JASON cloud service allows users to get the best possible performance out of their GNSS equipment using an internet browser, without the need for special installation or updates requirements.
In June, Alstom became the first railway manufacturer to integrate certified data-fusion algorithms for fail-safe train localization, using position and speed of trains based on GNSS data coming from multiple constellations, including Galileo.
The added value of Galileo and EGNOS in the European railway sector is widely known, especially when it comes to non-safety applications, such asset management and passenger information services.
In recent years, however, with multi-constellation becoming the norm and multifrequency receivers being adopted rapidly, rail stakeholders view GNSS-based solutions as game-changers for the future of European Train Control System (ETCS).
A recent example of EGNSS adoption in rail operations is the innovative odometry solution deployed by Alstom to measure the location and speed of its trains. The French rolling-stock manufacturer introduced a new sensor type, with a hybridisation of satellite information and inertial sensors. The solution is primarily using GNSS Doppler information, derived from Galileo, GPS and GLONASS constellations (configurable).
Such use allows to improve the overall confidence in the resulting speed, along with specific algorithms to master the resulting location accuracy. The GNSS receiver is an automotive grade receiver manufactured by u-blox. The inertial measurement unit (IMU) used to supplement information in case of GNSS loss is based on enhanced micro-electromechanical systems (MEMS) technology, with temperature compensation.
The new odometry system based on data fusion, which Alstom is currently implementing in Norway, is applicable to all types of trains and all environments, including the harshest weather conditions. It is estimated that by 2026, 450 trains will be equipped with this new feature across Norway.
Increased safety, lower costs for rail companies
Wheel slipping and sliding especially during demanding weather conditions can affect the odometer accuracy and the proper functioning of the different sensors involved. By incorporating Galileo signals as an extra layer of accuracy, Alstom managed to create a system that is capable of providing a more robust speed and location estimate. This space data fusion approach —certified by Belgorail — minimizes the need for the costly external radar components for localisation and speed measurement currently used.
“Industry embedding Galileo in their solutions is the proof that we are on the right path to ensure the market uptake of the EU Space Programme technology,” said Rodrigo da Costa, GSA executive director. “This is a recognition of the capability of EGNSS to reduce the need for infrastructure and related cost, while maintaining the operational safety of ETCS.”
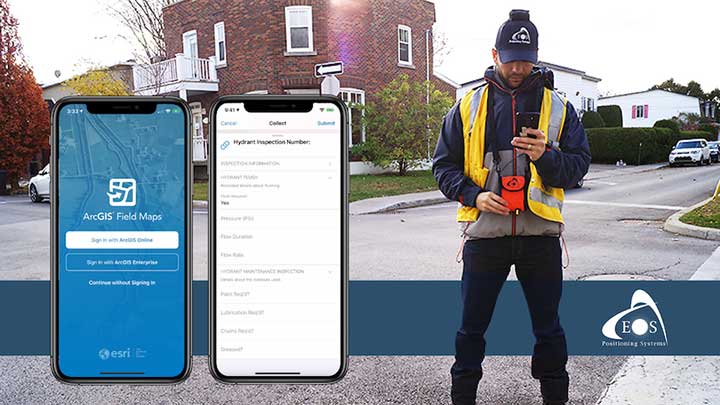
A new Esri mobile app, ArcGIS Field Maps, will be released in its first beta in July, with the final version expected to be released in September.
According to Esri, Field Maps will combine the following capabilities into a single app:
Simple map viewing and markup
High-accuracy field data collection and inspection
Battery-optimized location tracking
Work planning and task management
Turn-by-turn navigation
Field Maps also will include a new web app, integrated with ArcGIS, that can be used to configure and deploy maps optimized for your mobile workforce needs, create and assign tasks to mobile workers, and create and share views of worker locations.
Arrow support included
The inaugural beta includes support for Arrow GNSS receivers’ high-accuracy locations, elevations and metadata, according to Eos Positioning.
ArcGIS Field Maps will provide the combined functionality of five Esri mobile apps: ArcGIS Collector, ArcGIS Explorer, ArcGIS Tracker, ArcGIS Workforce and ArcGIS Navigator.
In the first beta version, users will be able to perform markups, work with read-only maps, and work with MMPKs, including high-accuracy GPS locations and metadata from Arrow GNSS receivers.
Photo: Eos Positioning
Customers who have been wanting to take advantage of high-accuracy GNSS data in apps such as Explorer and Tracker will now be able to with the beta release. Customers who would like to have field crews able to access read-only maps with high-accuracy, for instance (such as during utility locates), this is now a possibility. In addition, crews can take advantage of high-accuracy GPS tracks while tracking.
ArcGIS Field Maps will also support the two formerly Collector-exclusive Eos solutions Eos Locate and Eos Laser Mapping.
Eos Locate. This high-accuracy underground mapping solution will be available in ArcGIS Field Maps right away in the first beta release. A single fieldworker will be able to perform real-time, high-accuracy mapping of underground assets using the same workflow he or she had previously used with Collector and Arrow GNSS.
Eos Laser Mapping. Similarly, laser offsets with Arrow GNSS receivers and LTI laser rangefinders will be available in the first beta of ArcGIS Field Maps. Learn more about laser offsets, including the three workflows for using them, here:
“We are incredibly excited for the new opportunities ArcGIS Field Maps brings to expand our partnership with Esri,” Eos CTO Jean-Yves Lauture said. “Now our joint customers will be able to use the Arrow GNSS receivers with Field Maps to access high-accuracy location when simply viewing and marking up maps and when logging location tracks.”
Eos Positioning told its customers, “We encourage all Eos customers currently using Collector, Tracker and/or Explorer to join the beta. Meanwhile, Collector, Tracker and Explorer are planned to continue working as usual, according to the roadmap Esri has outlined.”
MGISS, a U.K. geospatial specialist, has released a new version of its web app TopoGrafi that allows for the display of 3D data in real-world models. With enhanced 3D data processing capabilities, TopoGrafi is an end-to-end platform for capturing buried asset data and processing it for augmented reality visualizations.
Aimed at the utility and infrastructure sectors, TopoGrafi is helping organizations in water and highway sectors enhance asset location data, improve on-site safety and reduce construction and maintenance costs.
Designed to be used alongside apps such as Esri Collector for ArcGIS, the TopoGrafi platform uses GNSS data.
It applies near-real-time conversions, transforming the recorded positions to local reference systems and aligning it with high-accuracy mapping including Ordnance Survey MasterMap.
The TopoGrafi toolkit also includes functionality to “snap” 3D features to each other and to other spatially referenced data, in order to create a true 3D model that can then be used to create Augmented Reality visualizations accessible from the desktop or in the field.
Small towns and cities face tight budgets for operating and maintaining public utilities. By sharing resources for common activities, a city can improve cost efficiency in its gas, electric, water and sewer services. In southern Minnesota, the city of New Ulm has modernized its approach to utility asset location and identification management. The effort is reducing costs and improving service for its 13,000 residents.
For more than a decade, the New Ulm Public Utilities group used a computer-aided design (CAD)-based system to track assets for six different utilities. After evaluating its approach for asset mapping, the city transitioned to a geospatial information system (GIS) which provided an opportunity to streamline data collection and management across all of the city-owned utilities.
The city turned to the Trimble Positions Desktop add-in software for Esri ArcGIS Desktop. The approach enables New Ulm field technicians to use Trimble TerraSync field software and Trimble Geo 7X GNSS handhelds for data collection for utility assets and then process the GNSS data in Trimble Positions Desktop. Using this method, the city can provide customized field workflows needed by the different utilities while delivering completed information to a single, centralized GIS database.
In addition to recording the locations and attributes of utility assets, the Trimble solution helps New Ulm technicians return to specific assets when needed. Using real-time GNSS positioning, field crews can navigate directly to specific assets. “Looking for a shutoff valve during a snowstorm isn’t easy,” said New Ulm GIS technician John Bendix. “The Trimble handhelds help them find an asset quickly.”
Bendix uses the Trimble solution to manage connectivity and geographic relationships for new assets. Assets connected to a feature (such as pipes connecting to a manhole) can be automatically adjusted as needed when new field data is checked into the database.
A new map method opens up parking continuous-environment mapping for enhanced low-cost urban navigation. Collectively recorded context data by many identical platforms gather similar sensor readings when operating in a given area. Further processing integrates the data with a map and feeds the summarized results to a user.
ByIvan Smolyakov, Evgeny Klochikhin and Richard B. Langley
Complex, dynamic urban environments comprise millions of devices with localization capabilities. While GNSS remains a primary positioning tool, its performance is subject to significant degradation from blocked signals, multipath and non-line-of-sight (NLOS) signal reception. In aided navigation, a positioning filter with GNSS measurements integrates data from various sensors and correction streams to compensate for these disadvantages.
Low-cost platforms are limited with the variety and quality of sensors on board, as well as by processor performance and battery capacity. Positioning routines must be computationally light, energy efficient and make the most productive use of available data.
One new research area covers use of crowd-sourced GNSS data. Many vehicles now include some type of native wireless connection capability, which could be complemented by a designated third-party device.
The growth in connectivity brings an opportunity to access a stream of sensor data produced by a high number of devices operating in a localized urban area. Here, we explore the idea of creating a GNSS signal-strength map using the connected vehicle GNSS data stream and then use the map as statistical information for Kalman filter parameters tuning. This approach improves filter reaction to the environment and produces a positioning accuracy improvement.
SYSTEM ARCHITECTURE
C/N0 levels of reflected and diffracted signals are more likely to be lower than that of the LOS signals. We propose that the C/N0 level averaged during a given period among all satellites tracked in a given area would correlate with a higher probability of multipath-contaminated and NLOS signal reception.
A sufficient number of C/N0 readings associated with a given space-time cube should be collected to compute the statistics populating the signal-strength map. However, the city environment does not remain static: new construction occurs, traffic congestion shifts, and so on. Therefore, the C/N0 space-time statistics must be continuously updated in real time to reflect these changes. Additionally, the solution must be highly scalable as the market of connected vehicles is growing and so is the volume of the streamed data.
A recent advance in cloud-based data-stream processing, a data flow model treats an input data stream as something that will never become complete. A derivative of that model is Flink, an open-source framework capable of both unbounded data (stream) and bounded data (batch) processing, while treating bounded data as a special case of the streaming applications.
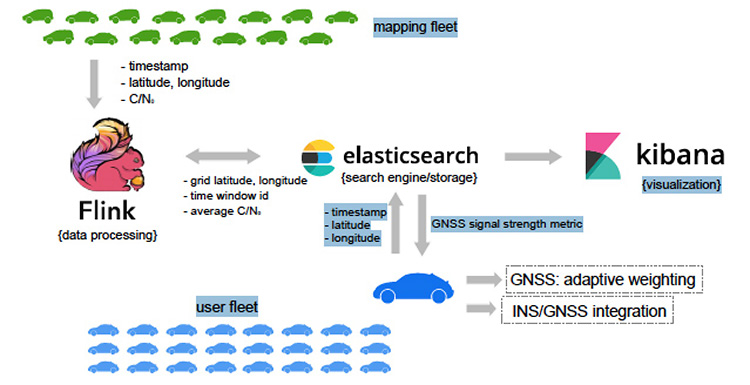
We use Flink as a core library for the environment mapping architecture as it fits the needs of event-time processing while being a highly scalable solution. The processing enables calculating necessary statistics based on a moment of time a reading occurred rather than based on a moment of time the reading arrived at the cluster. The proposed system architecture is presented in Figure 1.
The connected vehicle mapping fleet transmits packets of the GNSS receiver readings via cellular Internet connection to the server at 1 Hz. Each packet contains a timestamp in the UTC time system, the geographic coordinates determined by the proprietary positioning algorithms of a connected vehicle, and the C/N0 measurements per each tracked satellite.
The geospatial processing block calculates the average C/N0 metric among the readings of a given space-time cube. Computed statistics are sent to Elasticsearch, updating the map in real-time. Elasticsearch is an open-source, distributed search and analytics engine integrated with Kibana, an open-source data visualization tool. User platforms request the average C/N0 metric from the search engine with their UTC timestamp and coordinates and apply it in the processing filter.
PILOT PROJECT
The system is currently in prototype. Collection of the data populating the map was performed with two positioning boards designed by Parkofon Inc. and installed on the dashboard of a vehicle (Figure 2).
Figure 2. Mapping setup: Parkofon board is installed on the dashboard of a vehicle. (Image: Authors)
Lack of a high number of vehicles for the data collection campaign was compensated with an extensive piloting time (17 hours, 43 minutes) in a limited area, driving the same roads repeatedly. Two areas of New York City were the subject of extensive mapping.
Tests concentrated on two sectors with different GNSS signal strengths: sector A, a relatively open-sky area; and sector B exhibiting deep urban canyon conditions. The mapped average C/N0 is denoted as .
The of the less obstructed sector A = 39.3 dB-Hz, while that of the more obstructed sector B is lower: 18.1 dB-Hz. This tendency is repeatable throughout the surveyed area and allows for further GNSS signal-strength map integration into the algorithms at the user side.
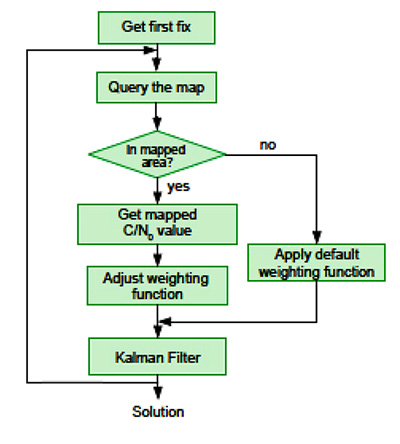
It is a challenge to find an optimal set of urban navigation filter parameters, as the signal obstruction environment changes significantly with the moving positioning platform. Our approach adjusts parameters of the GNSS observation weighting function with respect to the retrieved from the map. The algorithm scheme appears in Figure 3.
When the first position fix is obtained, the algorithm sends a request to the server with the timestamp and the coordinates determined at the previous epoch. If one is available in the current user area, the server response includes the metric retrieved from the GNSS signal-strength map. Next, the GNSS observation weighting function is adjusted according to equations given in the full technical paper (see Acknowledgment section).
PRACTICAL RESULTS
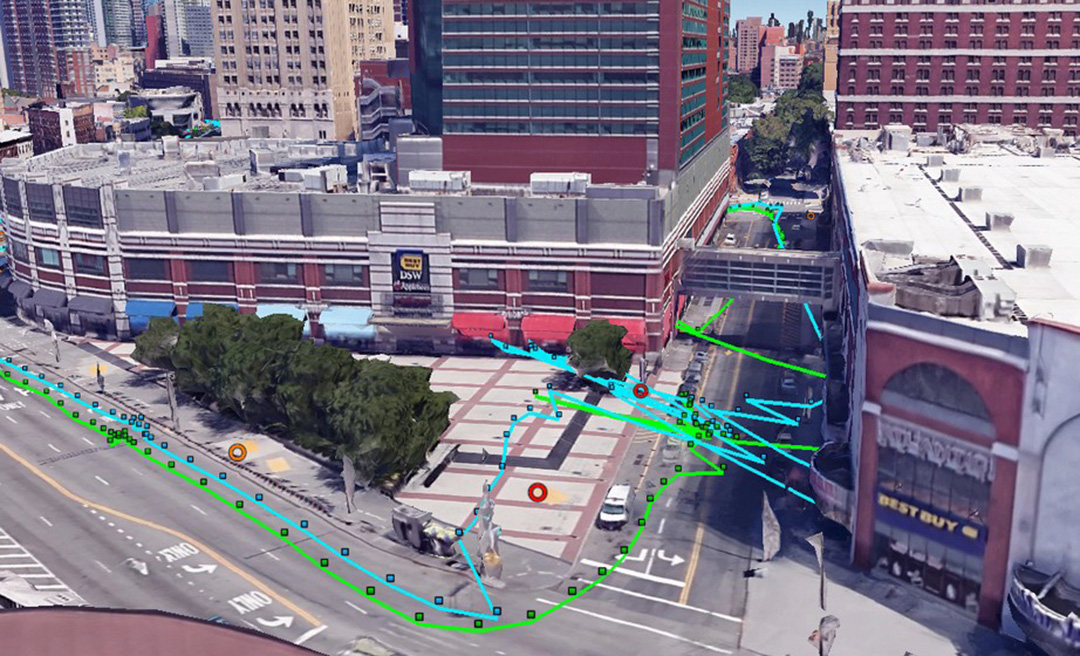
Algorithm performance was evaluated by analysis of the distances between the coordinates calculated with our engine and the centerline of the road in two downtown and two residential areas. For an estimated 86 percent of the track, our proposed map-aided weighting performed better than when the default weighting function was applied during the whole track.
The map-aided weighting of the observations brings approximately 25 percent and 35 percent accuracy improvement in the dense urban area and in the intermediate residential environment respectively. Additionally, there were instances of faster solution re-convergence when fix was lost due to insufficient number of the satellites tracked in narrow streets or under obstructions (see Figure 4).
Figure 4. Example of faster map-aided solution re-convergence. (Image: Authors)
FUTURE WORK
For the mapped average C/N0 levels to be unbiased, normalization procedures must be implemented. This would soften or eliminate hardware constraints on the mapping fleet and facilitate its growth. With more data available, the temporal discretization of the map needs to be implemented as satellite geometry and multipath environment change throughout the day.
Optimal dimensions of the mapped space-time cube remain an open question: more real-world data needs to be collected to provide better mathematically-derived estimations. We plan to investigate the benefits of a variable-dimension space-time cube with respect to the area and the mapping fleet density. We also plan to extend the environment map-aided filter tuning to a multi-constellation GNSS approach integrated with inertial navigation systems and other sensors.
The technique is commercially implemented in Parkofon, a fully automated parking payment and guidance system that helps people find cheaper, safer and easier parking. The platform includes a mobile app and device placed in the car to guide drivers to open parking spaces in real time and charge them only for actual time parked in designated garages. Parkofon also offers real-time on-street space availability.
Acknowledgments
This article draws on a paper presented at ION GNSS+ 2018. For the full paper, see www.ion.org/publications/browse.cfm. Research is supported by the Natural Sciences and Engineering Research Council of Canada.
MANUFACTURERS
Experimental datasets were collected with a Septentrio AsteRx-m2 receiver and Maxtena M1227HCT-A2-SMA antenna. Parkofon boards carry a u-blox M8N receiver module and a Taoglas CGGBP.25.4.A.02 patch antenna.
IVAN SMOLYAKOV is a Ph.D. student in the Department of Geodesy and Geomatics Engineering at the University of New Brunswick (UNB).
EVGENY KLOCHIKHIN is CEO of Parkofon Inc., a smart mobility company utilizing the Internet of Things to guide drivers to open parking. He holds a Ph.D. in Public Policy and Management from the Manchester Business School, UK.
RICHARD B. LANGLEY is a professor in the Department of Geodesy and Geomatics Engineering at UNB.
The first global GNSS-reflectometry ocean-wind data service has been launched by Surrey Satellite Technology Ltd. (SSTL) with the National Oceanography Centre (NOC), and with support from the European Space Agency.
The online data service, dubbed MERRBYS (Measurement of Earth Reflected Radio-navigation signals By Satellite), is free.
Users can access measurements of wind taken by a specially designed GNSS receiver hosted on SSTL’s TechDemoSat-1 satellite, which collects signals reflected off the surface of the ocean. The service offers monthly maps of wind speed over the oceans.
TechDemoSat-1 is also collecting GNSS reflections off land and polar regions, opening the door for new applications of this technology, such as soil moisture and ice measurements.
TechDemoSat-1 was launched in 2014 and carried eight payloads from different U.K. organizations. On successful completion of the satellite’s original mission, a life extension now allows the GNSS reflectometry payload to be operated continuously.
Onboard processed GNSS-R data is relayed to SSTL’s ground station in the U.K. and inverted for geophysical parameters using NOC retrieval algorithms for the estimation of near-surface ocean wind speed.
Users have access to data from the past three years, and new data is added daily with a latency of 30 days. Users can also register for a fast service allowing retrieval of data with a shorter delay — currently 48 hours, but with a target of less than 24 hours as the service matures.
Pilot demonstration
The current service is a pilot demonstration showing the potential for a new source of wind and wave measurements from in orbit using a small satellite. In the future, a constellation of low-cost small satellites carrying enhanced instruments could provide measurements in near-real time to support weather and wave forecasting.
The TechDemoSat-1 satellite and payload were supported by U.K. Centre for Earth Observation Instrumentation and the U.K. Space Agency, and sponsorship from European Space Agency has allowed the release of data.
More than 50 international journal papers have been published based on the use of the TechDemoSat-1 GNSS-R data. GPS World first discussed the technology in a 1999 Innovation column by GPS World Leadership Award Winner Attila Komjathy, “GPS, a new tool for ocean science.”
SSTL also provided the same GNSS reflectometry instrument to the NASA CYGNSS mission, where eight small satellites are using this technique to probe and analyze hurricanes.
Japan-based Aerosense Inc. has commercialized its AEROBO marker solution for drone surveying using the u‑blox NEO‑M8T timing module.
Photo: Aerosense
Conceived to compute absolute time to within 20 nanoseconds using incoming GNSS signals, the NEO-M8T lets users access raw GNSS data output, making it attractive for positioning applications that rely on post-processing GNSS data to enhance location accuracy.
Aerosense’s surveying solution is designed to reduce the time spent surveying construction sites. By combining ground markers equipped with a GNSS receiver with surveying drones and cloud-based data processing, Aerosense has converted huge workloads into a user-friendly application.
The surveying operation on the site involves setting up ground markers fitted with u‑blox NEO‑M8T high-performance GNSS receivers. The smart ground markers send the GNSS data they receive to the cloud, where it is post-processed using a static surveying algorithm to achieve high accuracy.
The AEROBO solution can transform high-resolution drone images into a survey-accurate map by using the absolute geographic coordinates of specific points on the surveyed terrain. Images gathered by overflying the terrain with the drones are combined to create centimeter-precise outputs, including orthomap views, 3D models and point clouds.
The challenge that engineers at Aerosense faced while developing their solution was achieving sufficiently high position accuracy. “We found a robust solution to the accuracy challenge by using the u‑blox NEO‑M8T high-performance positioning module,” said Satoru Shimizu, project leader of AEROBO technology development at Aerosense.
SBG Systems will demonstrate Qinertia, its in-house next-generation INS/GNSS post-processing software, at the Intergeo trade show, which takes place Sept. 26-28 in Berlin.
SBG Systems can be found is in Hall 1.1, stand C1.007.
For more than 10 years, SBG Systems has been designing inertial navigation systems from the internal inertial measurement unit (IMU) to filtering with GNSS data.
Designed for the surveying market, Qinertia is a fully in-house INS/GNSS post-processing kinematic (PPK) software. Whether the survey is made from a car, a UAV, a plane or a vessel, Qinertia will secure and enhance a surveyor’s acquisition, the company said.
The company will hold four live demonstration at its stand during Intergeo. The demonstrations will take place at 11 a.m. and 15 p.m. on both Tuesday, Sept. 26, and Wednesday, Sept. 27. There is no need to book to attend a demonstration, but please note that seats are limited.