New 95G and 250G accelerometers and 4000°/sec gyroscope ranges deliver navigation solution integrity in high-dynamic environments, supporting interceptors, missiles and hypersonic platforms.
VectorNav Technologies has announced 95G and 250G accelerometer and 4000°/sec gyroscope ranges across its Tactical Series inertial measurement unit (IMU) and inertial navigation system (INS) product line.
The enhancement directly addresses urgent requirements from defense contractors and platform developers operating in high-G mission profiles.
Defense modernization priorities are accelerating procurements of interceptors, missiles, and hypersonic platforms that must operate through launch, interception, and aggressive maneuvering — often in environments where GPS is denied or degraded. In these conditions, navigation performance depends on the IMU’s ability to maintain solution integrity without saturating.
The extended-range Tactical Series is designed to meet that requirement, providing the core inertial measurements that enable resilient position, navigation, and timing (PNT) solutions to operate through mission-critical flight phases where conventional sensors fail.
“The demand signal from our customers has been unmistakable,” said Jakub Maslikowski, VP of Business Development. “As platforms become faster, more maneuverable, and face increasingly sophisticated threats, high-performance inertial navigation solutions are needed at scale to meet the evolving demand. With nearly 20 years supporting these mission profiles, we know these applications—and the extended-range gyro and accelerometer will enable faster integration and more rapid fielding of reliable systems.”
The extended-range accelerometer and gyroscope are available across the full VN-110 IMU and VN-210 / VN-310 INS product family, supporting applications including:
high-speed interceptor platforms
rapid-response strike systems
hypersonic and advanced maneuvering vehicles
counter-UAS and air defense systems
next-generation precision guidance
The extended-range configurations are drop-in compatible with existing platforms — no changes to form, fit or function — enabling immediate upgrades without redesign.
GNSS receivers combined with inertial navigation systems (INS) have been widely applied to various mobile platforms.
However, in Arctic regions, GNSS positioning accuracy is severely degraded from low satellite elevation angles, frequent ionospheric disturbances, and insufficient visible satellites.
Moreover, the limited validation of existing onboard navigation systems further exacerbates the challenges of Arctic navigation.
To address these issues, a new research paper describes a hybrid neural network model based on temporal convolutional networks (TCN) and long short-term memory (LSTM) networks. The hybrid solution has been tested in the Artic with successful results.
The paper, “Robust GNSS/INS Integrated Navigation in Arctic GNSS-Challenged Environments Based on TCN-LSTM and MDAREKF,” is authored by Wei Liu, Tengfei Qi, Yuan Hu, Kaiwei Zhu, Tsung-Hsuan Hsieh and Shengzheng Wang of Shanghai Maritime University (DOI 10.1088/1361-6501/ae5279).
The proposal combines the pseudo-measurement information of GNSS predicted by the model with INS for integrated navigation to compensate for the interruption of GNSS and correct the error of INS.
Considering the potential bias in predicted pseudomeasurements, an adaptive robust extended Kalman filter (AREKF) algorithm based on Mahalanobis distance is further developed to dynamically adjust the innovation covariance matrix, thereby enhancing filter robustness.
Field experiments conducted on an Arctic survey vessel demonstrate that the proposed TCN-LSTM combined with AREKF significantly improves both the robustness and accuracy of integrated navigation under GNSS-constrained environments. In particular, during GNSS outages of 50 seconds, 140 seconds and 400 seconds, the proposed method reduces the horizontal root mean square error (RMSE) by 47%, 38% and 76% respectively.
OxTS has released WayFinder, a new localization solution designed for use in GNSS-denied environments. The system combines a GNSS/INS system, onboard processor, lidar scanner and two cameras to enable accurate positioning in areas with limited satellite coverage, such as urban canyons and underground tunnels.
Precise localization data is crucial for various industries, including autonomous navigation, automotive testing and sensor data georeferencing. However, obtaining accurate positioning information in areas with weak or unavailable GNSS signals has been a persistent challenge. WayFinder is designed to operate with minimal setup, requiring only basic configuration before use. The system’s key feature is Lidar Boost, a new software technology that enhances GNSS/INS performance in environments with unreliable satellite signals.
Lidar Boost employs advanced algorithms to process data from the integrated Lidar scanner, compensating for missing or erroneous GNSS updates in real time. This allows WayFinder to maintain high-accuracy localization in areas with limited satellite coverage and ensure smooth transitions between GNSS-supported and GNSS-denied environments.
The system can be used across multiple sectors. In ports, it can provide precise localization for autonomous vehicles operating among stacked shipping containers. In mining, it can support navigation for both underground and surface vehicles. WayFinder also offers a solution for indoor automotive testing without the need for fixed infrastructure. Surveyors working in areas with intermittent GNSS coverage can also benefit from its positioning capabilities.
Airbus Helicopters has selected Safran Electronics & Defense to supply its SkyNaute navigation systems to equip future H160M helicopters, developed as part of the France’s joint light helicopter program. The contract follows a December 2021 order from the French Ministry of the Armed Forces for 169 Guépard helicopters.
SkyNaute is an ultra-compact hybrid GNSS/inertial navigation system based on Safran’s patented technology — the hemispherical resonator gyroscope crystal. It offers virtually unlimited service life, a robust design for severe environments and ultra-high reliability, Safran said.
With its combination of high integrity and precision, the SkyNaute navigation system guarantees a high level of performance, even when GNSS signals are absent or jammed. It will enable H160M crews to perform their missions in challenging theaters of operations, the company said.
Tall buildings block GNSS signals, making satellite navigation in urban canyons very challenging. (Photo: RoschetzkyIstockPhoto/iStock/Getty Images Plus/Getty Images)
GPS positioning for navigation and mapping is challenging in urban environments, where GPS signals often are blocked by tall buildings. The following three papers — to be presented at the Institute of Navigation (ION) GNSS+ conference Sept. 19–23, 2022 — explore ways to solve that problem. The full papers will be available at www.ion.org/publications/browse.cfm following the conference.
ALGORITHMS FOR URBAN MAPPING
In this work, the authors use an urban environment model incorporating visibility predictions and remote-sensing techniques, which they tested in a sensor-equipped vehicle in Denver. They use an interacting multiple model (IMM) filter that uses extended Kalman filters to build and verify a map of the signal environment in an urban-canyon setting. The techniques will give ground-vehicle operations the ability to plan for blocked and delayed signals for global path planning.
Zeller, Emma; Strandjord, Kirsten, University of Minnesota; and Wang, Pai, Shanghai Jiao Tong University; “Algorithms for Mapping the Urban Signal Environment for Navigation of Ground Vehicle Operations.”
ADDING VISUAL TO GNSS/INS
GNSS real-time kinematic (GNSS-RTK) positioning is a key technology for surveying and mapping applications. To extend the capability of GNSS in difficult environments, a tight coupling between GNSS-RTK and an inertial navigation system (INS) can greatly improve the results. If the time spent in a GNSS outage is too long or if the kinematic of the survey is too weak, the GNSS/INS solution can be compromised with high navigation errors, ultimately making it impossible to align the heading angle at initialization.
This paper presents an innovative solution to overcome GNSS/INS limitations, minimizing system complexity by using a tightly coupled GNSS/INS solution with a monocular visual inertial SLAM system. This solution is capable of initialization in a few seconds and is very reliable in the long term. This vision/INS/GNSS coupling increases the overall RTK fix rate and broadens the availability of high-precision navigation solutions under challenging conditions.
Bénet, Pierre; Saussay, Brice; Saidani, Mourad; and Guinamard, Alexis; SBG Systems; “Tightly Coupled Inertial Visual GNSS Solution: Application to LIDAR Mapping in Harsh and Denied GNSS Conditions.”
USING 3D BUILDING MODELS
To solve the urban-navigation challenge, the authors propose using a 3D building model to assist GNSS positioning. This type of algorithm is named the 3D building model aided GNSS (3DMA GNSS). It can predict measurement errors and the visibility of the satellites, as line-of-sight or non-line-of-sight. The solution is then derived from the likelihood of the observed and predicted measurements over candidate locations.
The authors propose an innovative method for evaluating the reliability of building models based on the awareness of sky visibility in a specific geographic context. Sky visibility estimation is improved with use of a support vector machine regression and considering low-Earth-orbit (LEO) constellations. The real-time sky visibility could present the update of the surrounding buildings, whereas the predicted sky visibility based on the existing building models remains unchanged. Making use of this inconsistency, the authors could identify areas with the updated building. Additionally, the impacts of the building update monitoring on the 3DMA GNSS are evaluated in an urban canyon.
Xu, Hao-Sheng and Hsu, Li-Ta; Department of Aeronautical and Aviation Engineering, The Hong Kong Polytechnic University; “Urban Buildings Update Monitoring Based on Sky Visibility Estimation using GNSS and LEO.”
The company is engaged in trials with customers in mapping, surveying, robotics, construction, trucking, defense, aerospace and autonomous vehicle applications
Anello Photonics has made available an optical gyroscope and GNSS/inertial navigation system (INS) evaluation kit (EVK) for autonomous applications.
Powered by Anello’s optical gyroscope solution and sensor-fusion engine, the Anello EVK can maintain centimeter accuracy in conditions where far more expensive ground-truth positioning and localization systems degrade.
The Anello EVK is accurate in extended full GNSS-denied operation and is stable over wide temperature ranges and under extreme vibration.
“We are actively engaged with many customers to drive new technology adoption and explore how by providing high precision, highly scalable, optical gyro-based solutions we can accelerate and improve position accuracy for a wide range of autonomous use cases,” said Mario Paniccia, CEO of Anello Photonics. “We see a lot of interest around our unique and innovative integrated silicon photonics technology and our product roadmap, and are excited to be working with many industry leaders looking for cutting-edge innovation.”
The Anello EVK is designed to be easy to use while enabling seamless navigation and positioning in challenging GNSS-denied environments where accuracy is paramount.
“Anello’s optical gyroscope solution is perfect for our offerings due to its performance compared to other MEMS solutions currently available and used by the industry. The Anello solution provides ease of installation together with high accuracy and reliability,” said Sean Kish, CEO of Psionic. “Through our work with Anello, we’re seeing significant improvements in the performance of our SurePath product for long-range precision navigation in GNSS-denied environments.”
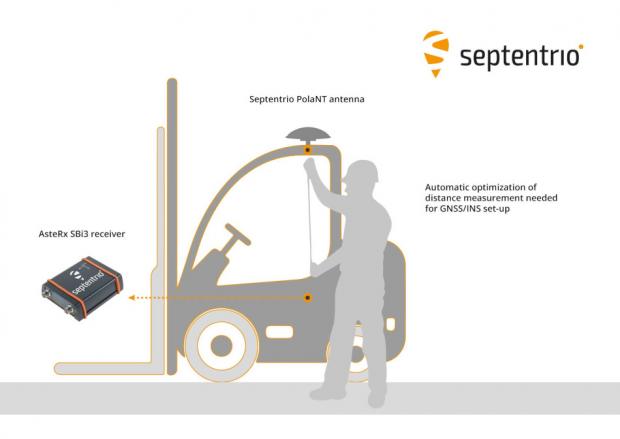
Septentrio has taken a step toward simplifying the integration process of its GNSS receivers that include inertial navigation systems (GNSS/INS). Its new RxLeverArm software tool aids GNSS/INS installation and improves accuracy, with automatic optimization of lever-arm settings.
RxLeverArm is now part of Septentrio’s RxTools software package included with every Septentrio GNSS/INS receiver. This new tool visualizes, validates and automatically calibrates the exact distance between the INS sensor and the antenna, removing the need for accurate distance measurements with complex instruments.
GNSS/INS receiver setup is significantly simplified with RxLeverArm functionality, which enables users to start testing minutes after receiver installation. (Image: Septentrio)
“We are focusing our design around easy, efficient and effective INS installations ensuring short time-to-market and accurate deployment for our customers,” said Danilo Sabbatini, product manager at Septentrio.
“The RxLeverArm tool in combination with the intuitive web user interface, as well as the support material available in our knowledge base, enables customers to start testing within minutes after the physical installation of their receiver,” Sabbatini said.
For lever-arm compensation, users now only need to measure the rough distance between the inertial measurement unit (IMU) and the main GNSS antenna reference points on the vehicle. Data is then logged under open-sky conditions, which allows the RxLeverArm tool to optimize the initial rough distance measurement and prevent common errors such as sign inversion.
The result is simplification of the installation process and better accuracy of the lever-arm measurement.
For navigation and control of any robotic or autonomous outdoor system, GNSS and inertial navigation systems (INS) are key components. Inevitably, the question arises: Should you build your own custom solution or integrate an available GNSS/INS combined solution? What would give you the best performance, while keeping the total cost of ownership (TCO) to a minimum? The TCO is also known as the “long-term price” and is defined as the purchase price plus the costs of operation over time.
Xenomatix is a company offering automotive solutions based on lidar technology. With eight years of innovative experience, Xenomatix has installed a pre-integrated GNSS/INS receiver on its latest lidar product, achieving high GNSS/INS performance with minimal TCO.
In an integrated INS/GNSS receiver, the GNSS receiver provides positioning with centimeter-level accuracy. The other component is a micro-electromechanical inertial measurement unit (MEMS IMU), which measures 3D orientation in terms of heading, pitch and roll angles with sub-degree precision. For its latest product XenoTrack, Xenomatix chose an INS called XenoAsterx based on the AsteRx SBi3 from Septentrio, which it integrated alongside its lidar to collect road-quality data to the smallest detail.
From an in-house solution to a pre-integrated system
Three years ago, when Xenomatix started developing its new lidar road-inspection system, the company had a GPS receiver, an IMU and an odometer as accompanying sensors. The company wanted to expand into new markets of road inspection in accordance with international standards, and so it needed to improve its components to take the overall performance of its system to the next level with RTK high-accuracy positioning.
To achieve this, while saving time and costs, Xenomatix acquired an AsteRx SBi3 INS/GNSS receiver, which allowed it to focus on its core lidar technology and sensor-fusion algorithms.
This off-the-shelf INS/GNSS solution provided all the high-accuracy positioning and orientation information Xenomatix needed, while eliminating most costs of development, maintenance and support. The new receiver allowed them to drive for miles, without any offset in positioning, something impossible with the previous GPS receiver.
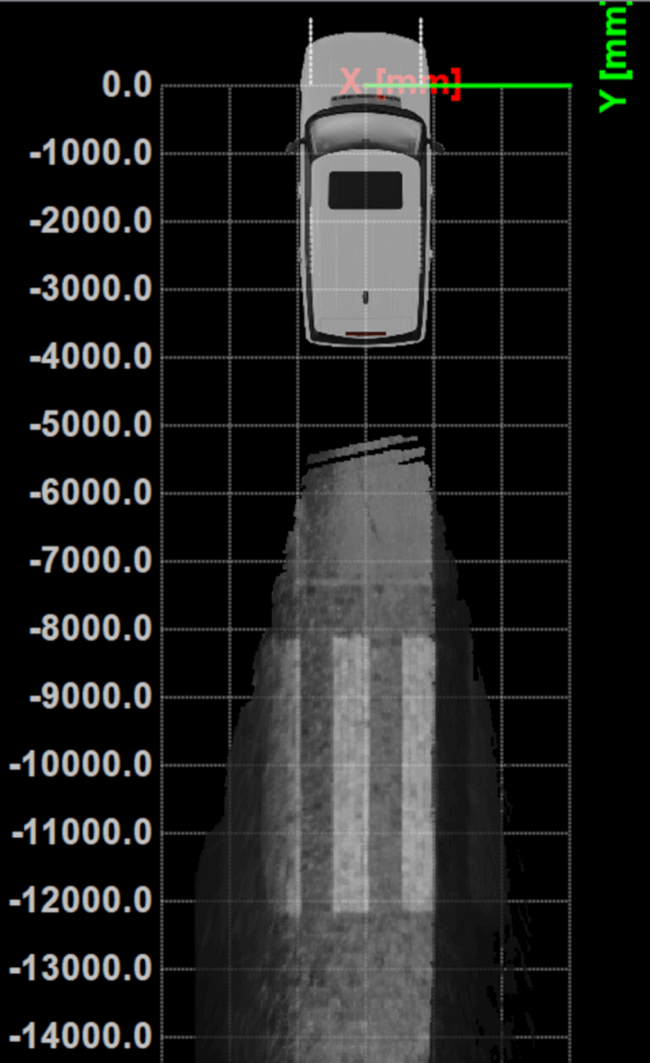
The unique technology from Xenomatix stitches images by using lidar point-cloud overlays. However, when the car is moving fast, this overlay is smaller. The pre-calibrated GNSS/INS extends system performance by allowing stitching even when driving at higher speeds.
“If we start driving and we stitch the road for tens of kilometers and we come back to the same starting point, then we see an offset of only a few millimeters,” said Filip Geuens, CEO, Xenomatix. “This is for us the strongest proof of accuracy and reliability of the GNSS sensor.“
Why pre-integrated GNSS/INS offers better value
The pre-integrated GNSS/INS allows XenoTrack to collect road data even at higher speeds. (Credit: Septentrio)
A pre-integrated GNSS/INS solution — versatile enough to fit into virtually any autonomous or mapping system — offers the best value in the long run for the following reasons.
Better performance. The manufacturer of a GNSS/INS solution specializes in fusing the GNSS receiver and the INS in an optimal way. To accomplish this, the sensors are synchronized and their output run through a sophisticated Kalman filter algorithm. The fused device is then fine-tuned for optimal operation under various conditions. Finally, it is extensively tested and validated.
While being used by numerous customers and in varying applications, the GNSS/INS solution proves itself on various levels such as accuracy and robustness. This results in superior performance, even in the most demanding environments.
After installing the AsteRx SBi3 GNSS/INS system, XenoTrack was able to extend its functionality to inspect longer distances of roads at higher speeds. The AsteRx SBi3 operates reliably, even in challenging environments, such as when driving near high cliffs or under bridges.
Less development time and lower costs. When building a system, the development time is usually about one year employing two full-time GNSS/INS specialists. Hardware components need to be integrated and synchronized, while various interfaces and the Kalman filter need to be implemented. Additional features may be developed, such as velocity input as well as tools for validation, before the intricate step of performance fine-tuning. Finally, additional testing efforts are needed for verification and validation of the device.
On the other hand, a pre-integrated GNSS/INS system with easily accessible interfaces and flexible configuration ensures quick installation, meaning the product is ready within weeks.
Lower maintenance costs and support. Certain high quality pre-integrated GNSS/INS receivers are future-proof — ready to use new GNSS satellite signals and services as soon as they become available. An example of such upcoming service is the Galileo OSNMA anti-spoofing authentication.
Some receiver manufacturers such as Septentrio also offer continuous product improvement in the form of free firmware updates. A system developed in-house, on the other hand, needs continuous investment to maintain its competitive edge.
When issues occur, Septentrio also offers local worldwide support, with experienced application engineers ready to solve GNSS, INS or coupling issues that could halt the production process. For example, when Xenomatix discovered that its GNSS/INS was not working optimally in a certain environment, the company called Septentrio. Within days application engineering experts who analyzed the logged data found the source of the issue and proposed a solution.
Focus on core technology. When the budget is limited, choices need to be made about where to focus the efforts. When a company saves on GNSS/INS development, more can be invested in core technology. This means avoiding any lost-opportunity costs and optimizing margins.
Building your own is not always the best option
Acquiring a pre-integrated GNSS/INS receiver allowed Xenomatix to have a superior and affordable product with a competitive edge. AsteRx SBi3 increased the performance of the XenoTrack mapping system, while a short integration period allowed a faster time-to-market.
Xenomatix also benefited from low maintenance costs, keeping overall TCO to a minimum. Since the company was not spending time developing a custom GNSS/INS system, it could focus fully on its core technology. This allowed Xenomatix to take its business to the next level at a high pace.
Award-winning technology
In November 2021, the XenoTrack road scanner, with AsteRx SBi3 inside, was announced a winner of the IRF Global Road Achievement Award for its innovative road scanning and surveying solutions.
Septentrio now offers Qinertia post-processing software from SBG Systems on AsteRx-i3 D Pro+, AsteRx-i3 S Pro+ and AsteRx SBi3 Pro+ receivers
Septentrio will now offer post-processing solutions for its GNSS/INS (inertial navigation system) receivers, using SBG Systems’ Qinertia software.
The AsteRx-i3 Pro+ receivers are fully compatible with Qinertia post-processing software, so no data manipulation is required before the post-processing step.
Land or aerial mapping applications, which do not have access to real-time GNSS corrections, benefit from post-processing software for higher positioning and orientation (heading, pitch and roll) accuracy. With the addition of post-processing, Septentrio GNSS/INS products cover the full mapping workflow.
“As a result of our cooperation with SBG Systems, Septentrio’s mapping customers who use GNSS/INS are benefiting from a quicker and more reliable workflow,” said Danilo Sabbatini, product manager at Septentrio. “The intuitive user interface of Qinertia software makes it easy for users to further improve their positioning and orientation accuracy in the post-processing step.”
In case of GNSS outage or correction link failure, post-processing recovers accuracy for recorded positioning and inertial data.
After the mission, Qinertia gives access to real-time kinematic (RTK) corrections from more than 8,000 base stations to deliver centimeter level accuracy. Trajectory and orientation are greatly improved by post processing GNSS and IMU data forward and backward. The Qinertia GNSS/INS post-processed kinematic (PPK) solution provides accuracy, reliability, advanced quality-control indicators, and a modern application programming interface (API).
Qinertia recently added an image geotagging feature, and specific outputs dedicated to photogrammetry.
Qinertia post-processing software will be used on Septentrio receivers. (Photo: SBG Systems)
A roundup of recent products in the GNSS and inertial positioning industry from the July 2021 issue of GPS World magazine.
OEM
GNSS/INS Sensors
Photo: Septentrio
Five receivers in new product line
The AsteRx-i3 product family provides an array of next-generation receivers, from plug-and-play navigation solutions to feature-rich receivers with raw measurement access. Included are OEM boards and ruggedized receivers enclosed in a waterproof IP68 housing. The Pro receivers offer high accuracy positioning with 3D orientation and dead-reckoning for plug-and-play integrations. Pro+ receivers provide integrated positioning and orientation along with raw measurements, in single- or dual-antenna configurations, suitable for applications with sensor fusion. One of the receivers offers an off-board inertial measurement unit (IMU), which can be mounted exactly at the alignment point of interest.
The RES 720 GNSS dual-frequency embedded timing module provides next-generation networks with 5-nanosecond accuracy. It uses L1 and L5 GNSS signals to provide superior protection to jamming and spoofing, mitigates multipath in harsh environments, and adds security features to make it suitable for resilient networks. At 19 x 19 millimeters, the RES 720 is suitable for 5G Open Radio Access Networks (RAN)/XHaul, smart grids, data centers, industrial automation and satellite communication networks, as well as calibration services and perimeter monitoring applications.
The new HG1125 and HG1126 IMUs are low-cost inertial measurement units that serve both commercial and military applications. They use sensors based on micro-electromechanical systems (MEMS) technology to precisely measure motion. They can survive shocks up to 40,000 G-force. The HG1125 and HG1126 can be used for a variety of defense and commercial applications, such as tactical military needs, drilling, unmanned aerial vehicles or navigation systems for general aviation aircraft.
The SDI170 quartz MEMS tactical-grade IMU is designed as a form-, fit- and function-compatible replacement for the HG1700-AG58 ring-laser gyroscope (RLG) IMU, but with superior overall performance, versatility and a significantly higher mean time between failures (MTBF) rating over ruggedized environments. The SDI170 IMU delivers highly linear accelerometer performance and longer life compared to the HG1700 IMU.
The OSA 5405-MB is a compact outdoor precision time protocol (PTP) grandmaster clock with a multi-band GNSS receiver and an integrated antenna. It ensures timing accuracy by eliminating the impact of ionospheric delay variation, enabling communication service providers and enterprises to deliver the nanosecond precision needed for 5G fronthaul and other time-sensitive applications. A multi-constellation GNSS receiver and antenna enable the OSA 5405-MB to meet PRTC-B accuracy requirements (+/–40 nanoseconds) even in challenging conditions. It receives GNSS signals in two frequency bands, using the differences between them to calculate and compensate for ionospheric delay variation. The OSA 5405-MB is resilient against jamming and spoofing, considered critical for 5G synchronization. It can work with up to four GNSS constellations concurrently (GPS, Galileo, GLONASS and BeiDou).
The Toughbook S1 is a fully rugged 7-inch Android tablet for capturing and accessing critical information in the field. GPS and LTE come optionally. The tablet is supported by Productivity+, a comprehensive Android ecosystem that enables customers to develop, deploy and sustain the Android OS environment in the enterprise. The Toughbook S1 tablet’s compact, rugged and lightweight body is made for portability and reliability for field workers. It has a 14-hour battery life and warm swap battery. Features include a sleek outdoor-readable anti-reflection screen, patented rain mode and multi-touch performance whether using a stylus, finger or glove.
The AGS-2 and AGM-1 are manual guidance and autosteering receivers. Location data enable crop optimization, including soil preparation, seeding, crop care and harvesting. Designed to suit virtually any agricultural machine type, make and model, the AGS-2 receiver and steering controller combines steering with network reception and tracking. It comes standard with DGNSS correction services and is upgradeable using NTRIP and an optional RTK radio in the Topcon CL-55 cloud connectivity device. The AGM-1 is offered as an economical entry-level manual-guidance receiver.
Provides fast data processing for construction and surveying
The Trimble T100 high-performance tablet is suitable for both experienced and novice users. It is optimized for Trimble Siteworks Software and supporting office applications such as Trimble Business Center. Its accessories are designed to complement user workflows, enabling users to complete quality assurance and quality control before leaving the field. The tablet is designed to be flexible and usable in a variety of configurations and job sites. It is engineered to be ergonomic and portable on and off the pole. Features include a 10-inch (25.4 cm) sunlight-readable touchscreen display, a directional keypad with programmable function keys and a 92-Wh internal battery.
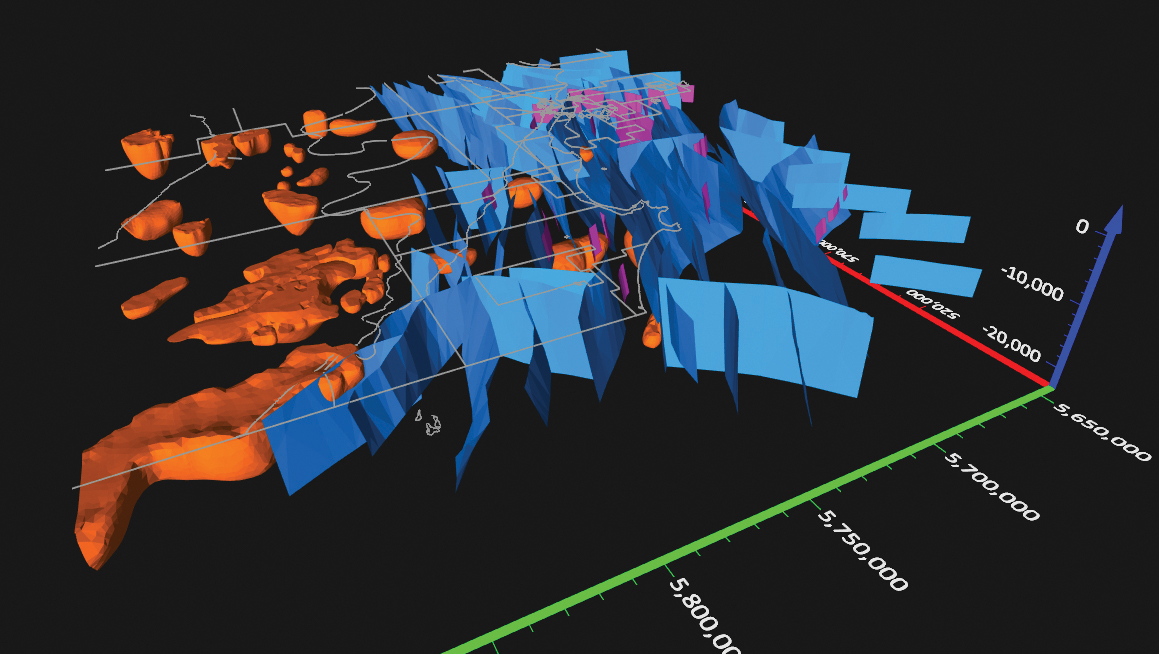
Surfer has new gridding, contouring and surface mapping software to make it easier for users to visualize, display and analyze complex 3D data. Surfer enables users to model data sets, apply an array of advanced analytics tools, and graphically communicate the results. The scientific modeling package is used in oil and gas exploration, environmental consulting, mining, engineering and geospatial projects. Enhancements have been made to 3D Base Maps, Contour Volume/Area Calculation, 3D PDF Exporting Options and automated features for creation of scripts and workflows.
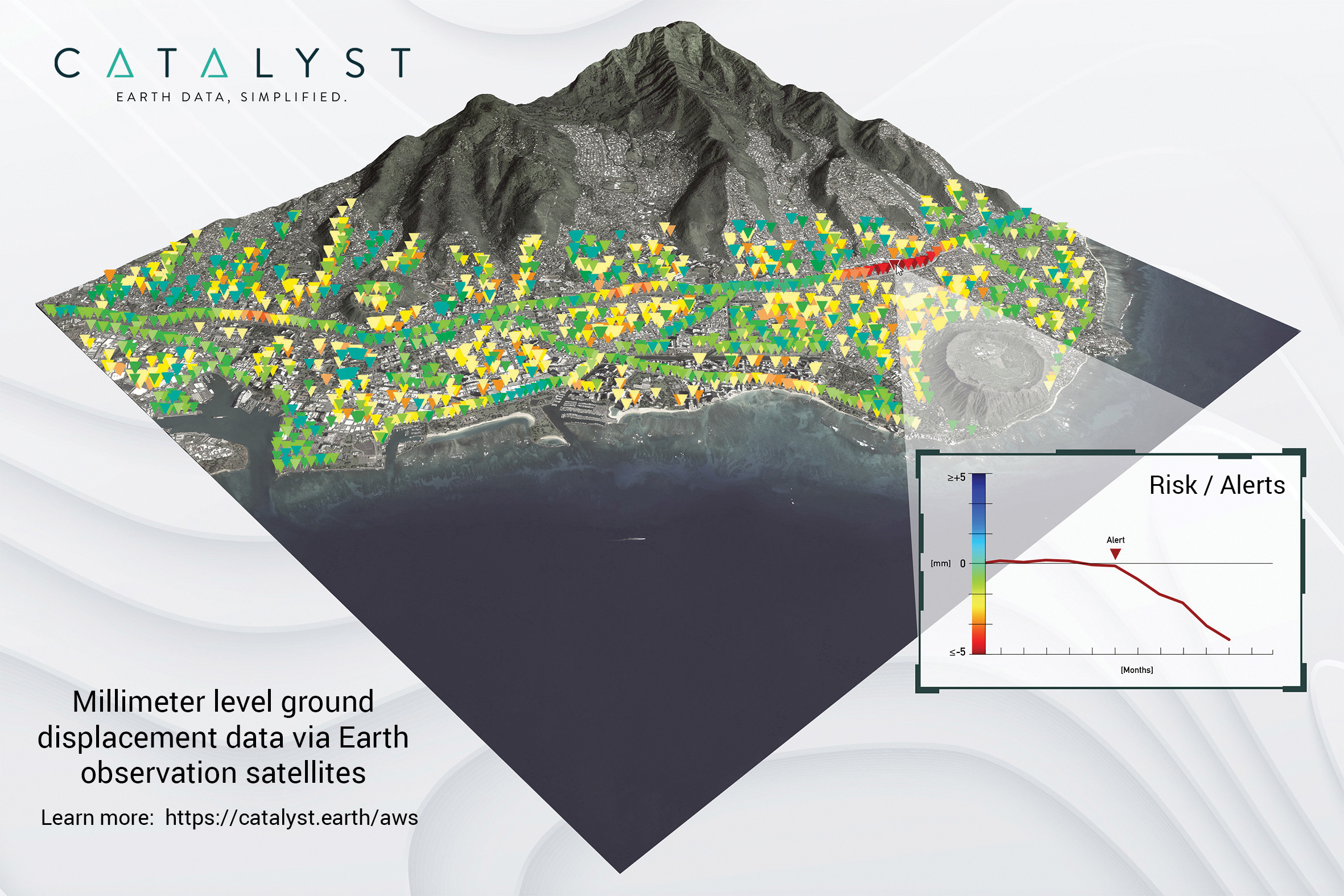
A Catalyst-AWS collaboration delivers actionable geoscience analytics to users, providing satellite-based Earth observation intelligence. The data and analytics are delivered via Amazon Web Services (AWS) Cloud. Catalyst is a PCI Geomatics brand. The initial solution, available through AWS Data Exchange, is an infrastructure risk-assessment service that uses satellite data to continuously monitor millimeter-level ground displacement over a subscriber’s area of interest anywhere on Earth. Catalyst is exploring additional risk mitigation solutions and monitoring services using AWS. Having image processing science and imagery on the cloud reduces latency and costly data transfers.
The GPS-aided INS-U is a fully integrated attitude and heading reference system (AHRS), IMU and air-data computer high-performance strapdown system that determines position, navigation and timing information for any device on which it is mounted. The INS-U uses a single antenna, multi-constellation u-blox GNSS receiver. With access to GPS, GLONASS, Galileo, QZSS and BeiDou, the INS-U can be used in a variety of GPS-enabled environments and is protected against spoofing and jamming. The INS-U has two barometers, a miniature gyro-compensated fluxgate compass, and tri-axis temperature-calibrated advanced MEMS accelerometers and gyroscopes. These high-performance sensors, along with Inertial Labs’ new on-board sensor-fusion filter, and state-of-the-art guidance and navigation algorithms, provide accurate position, velocity and orientation of the device under measurement.
The Reach M+ and Reach M2 positioning modules for UAV mapping provide centimeter-level accuracy in real-time kinematic (RTK) and post-processed kinematic (PPK) modes, enabling precise UAV mapping with fewer ground control points. The Reach M+ single-band receiver has a baseline up to 20 kilometers in PPK. The Reach M2 is a multi-band receiver with a baseline up to 100 kilometers in PPK. Reach connects directly to a camera’s hot-shoe port and is synced with the shutter. Time and coordinates of each photo are logged with a resolution of less than a microsecond. Reach captures flash sync pulses with sub-microsecond resolution and stores them in a raw data RINEX log in the internal memory. This method allows ground control points to be used only to check accuracy.
System simplifies drone inspection missions, deliveries
The Dronehub is an automated solution that can provide undisturbed drone service 24/7 in nearly any weather condition. With the integration of IBM artificial intelligence technology, Dronehub solutions can operate and automatically provide information with little human interaction. The system includes the drone and a docking station with automatic battery replacement. It can fly for 45 minutes in +/–45° C weather, up to 35 km in winds up to 15 m/s. It can carry a payload up to 5 kg as far as 15 km. It can be used for monitoring, inspection and measurement; cargo transport and parcel deliveries; and mobile ground infrastructure; and security.
The Propeller Platform and WingtraOne drone package enable construction professionals to collect survey-grade data across the worksite consistently and accurately. To operate, surveyors place Propeller AeroPoints (smart ground-control points) on their worksite, and then fly the WingtraOne drone to collect worksite survey data. Survey images are uploaded to Propeller’s cloud-based platform, where the fully automated geotagging and photogrammetry processing is completed within 24 hours of submission on the platform. Uses include mines, road and railway projects, highways and industrial complexes. Data collection with AeroPoints and Propeller PPK can serve as a reliable, single source for survey data and progress. Teams across the entire worksite can view geographically accurate and realistic 3D site models and track, inspect and report on job progress and productivity safely and accurately.
Stamp-sized module provides RTK positioning and heading
The PX1122R is a high-performance multi-band quad-GNSS real-time kinematic (RTK) receiver featuring 1 cm + 1 ppm position accuracy and under 10-second RTK convergence. It has a 12 x 16 millimeter form factor, about the size of a postage stamp. It can be configured for a base or a rover, and supports a moving base RTK for precision heading applications. The PX1122R has a maximum quad-GNSS RTK update rate of 10 Hz, providing a quick response time and more stable performance for fast-moving precision guidance applications.
Utilizing both L1 and L5 GPS frequencies, along with multi-constellation support (GPS, Galileo, GLONASS and BeiDou), the MSC 10 marine satellite compass provides precise positioning and heading accuracy within 2 degrees. Its 10-Hz position update rate delivers detailed tracking information. It eliminates magnetic interference, which can degrade heading accuracy. The MSC 10 is easy to install and can be used as the primary position and heading sensor across multiple systems, including autopilots. If the satellite signal is lost, it will transition from GPS-based to a backup magnetometer-based heading.
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following four focused on autonomous vehicle positioning for automobiles on city streets. The papers are available at www.ion.org/publications/browse.cfm.
Digital Maps with Tethered Positioning
The authors propose a new method for tight integration of digital map and dead-reckoning (DR) system (inertial measurement unit plus wheel odometer) to provide reliable navigation solutions in challenging GNSS environments for extended periods. Integrated DR and GNSS have been widely used as the backbone of any navigation system for the internet of things (IoT) and vehicle navigation applications. Dollar-level micro-electro-mechanical system (MEMS) inertial measurement units (IMUs) aided by vehicle-wheel odometers have been recently used as low-cost DR systems to bridge GNSS gaps in harsh environments, such as urban canyons, tunnels and under bridges.
However, DR drift errors rapidly increase over time and cannot satisfy most IoT and land-vehicle navigation requirements. Plus, the GNSS receiver may fail to provide accurate position or even experience a complete outage for more than 15 minutes, causing the tethered positioning error to reach several hundred meters. Because land vehicles are supposed to travel on roads, feedback from a digital map can be used to constrain their position.
The authors used a fuzzy-logic map-matching algorithm to identify the correct road segment on which the vehicle moves. A feedback filter senses a correct map-matched position as well as the road segment as measurement updates to the Kalman filter (KF) of the tethered positioning system. The proposed tight integration of digital maps and a DR system is evaluated using datasets collected by Profound Positioning Inc. in Calgary, Alberta, Canada. Results show the proposed method has an average of 0.15% of relative horizontal position error for Calgary datasets — a considerable improvement over the tethered-solution-only with 3.3% of relative horizontal position error. The average azimuth error of the proposed system is 1.3 degrees, while the tethered positioning system shows an average azimuth error of 9.7 degrees.
Citation. Yashar Balazadegan Sarvrood, Haiyu Lan, Aboelmagd Noureldin, Naser El-Sheimy and Profound Positioning Inc., Calgary, Alberta, Canada. “Tight Integration of Digital Map and Tethered Positioning and Navigation Solution for IoT applications and Land Vehicles.”
5G Signals for Opportunistic Navigation
This paper presents a navigation framework in which 5G signals are used for navigation purposes in an opportunistic fashion. A carrier-aided code-based software-defined receiver (SDR) produces navigation observables from received downlink 5G signals. The SDR produces navigation observables from 5G signals and a navigation filter in which the observables are processed to estimate the user equipment’s position and velocity.
An experiment was conducted on a ground vehicle to assess the navigation performance of 5G signals. In the experiment, the vehicle-mounted receiver navigated using 5G signals from two 5G base stations (also known as gNodeBs, or gNBs) for 1.02 km in 100 seconds. The proposed 5G navigation framework demonstrated a position root-mean-squared error of 14.93 m, while listening to signals from only two gNBs.
Citation. Ali A. Abdallah, Kimia Shamaei and Zaher M. Kassas, “Assessing Real 5G Signals for Opportunistic Navigation.”
Using Low-Cost Onboard Sensors
For autonomous vehicles, accurate positioning must be ubiquitous — reliably available at all times and in all places in which the vehicle is expected to operate. While GNSS commonly provides the basis for absolute positioning, it suffers from the problem of availability whenever a direct view of enough satellites is not possible. To address this failure mode, additional complementary sensors can be added to the overall navigation solution through a technique known as sensor fusion. Sensors such as inertial measurement units (IMUs), cameras, lidars, radar and more can be selected in such a way that the individual shortcomings of each sensor are mitigated, and the overall robustness and reliability are improved.
Although current autonomous-vehicle applications employ sensor-fusion techniques, they tend to rely on high-performance sensors to meet the accuracy requirements. These high-performance sensors tend to induce a much higher cost burden than would be acceptable for commercial production, and therefore make mass autonomy too expensive.
This paper focuses on using the lower cost sensors already available on most modern vehicles. These include low-resolution odometry and consumer-grade IMUs currently used for dynamic stability control and wheel-slip detection. A novel approach for combining vehicle speed, steering angles, transmission settings and multiple odometry inputs is presented along with achievable results while operating under a GNSS-denied environment. The test trajectory mimics a typical parking structure with many corners and short, straight segments. The only a priori information required for the filter is the wheel track and wheelbase (separation distance of the wheels).
A 90% performance improvement compared to the stand-alone GNSS/INS solution was observed during GNSS outages of up to 30 minutes. Furthermore, up to a 50% improvement was observed when comparing the multi-odometry to the single-odometry outages during the same 30-minute outage condition. Beyond GNSS outage performance, this paper shows how the use of the extra input to the filter can improve the positioning system’s protection levels to allow for more frequent engagement of the autonomous navigation system.
Citation. Ryan Dixon, Michael Bobye, Brett Kruger and Jonathan Jacox, “GNSS/INS Sensor Fusion with On-Board Vehicle Sensors.”
Radar and INS/GNSS
An autonomous vehicle requires a ubiquitous, accurate, precise and reliable localization system. Many sensors can be used for positioning and navigation, each with its strengths and weaknesses. Inertial measurement units (IMU) are usually used to build inertial navigation systems (INS). INS can be accurate for short durations; however, an INS accumulates errors and loses its accuracy quickly, especially when using low-cost MEMS-based sensors. GNSS can provide an absolute position and velocity to update the INS over time. A barometer provides absolute elevation information, and an odometer provides a speed update.
An integrated navigation solution consisting of an IMU, a GNSS-RTK receiver and odometer can perform well in open-sky areas and on highways. This system can achieve lane-level accuracy most of the time based on the condition of the sensors and the quality of the measurements. However, in downtown and urban environments, the degradation, multipath and blockage of the GNSS signal leads to poor performance for such an integrated navigation system, which is challenged to maintain lane-level positioning.
This paper presents a version of AUTO (formerly known as Coursa Drive), a real-time integrated navigation system that provides an accurate, reliable, high-rate and continuous navigation solution for autonomous vehicles by integrating INS, RTK GNSS, odometer and radar sensors with TomTom’s HD Maps. AUTO performs a tight nonlinear integration of the radar data and maps with the INS/GNSS/odometer system.
Results demonstrate that radar measurements and HD Maps can be tightly integrated with INS/GNSS in an effective manner, such that the integrated system can provide a high-rate, accurate, reliable and robust navigation solution. This is a crucial requirement for realizing a fully autonomous vehicle that can operate in urban environments under a wide range of conditions, including adverse weather and lighting conditions, even in downtown areas with degraded or denied GNSS signals.
Citation. Abdelrahman Ali, Billy Chan, Amr Shebl Ahmed, Medhat Omr, Dylan Krupity, Qingli Wang, Amr Al-Hamad, Jacques Georgy and Christopher Goodall, “Tight Coupling Between Radar and INS/GNSS with AUTO Software for Accurate and Reliable Positioning for Autonomous Vehicles.”
The Trimble GuidEx machine guidance system is an advanced navigation solution to guide machines along route corridors or to specific target areas.
Photo: Trimble
Trimble has introduced the Trimble GuidEx Machine Guidance System, an advanced machine navigation solution intended to quickly and efficiently guide machines along route corridors or to specific target areas, while providing local awareness using customer-provided mapping or engineering data to create exclusion and inclusion zones.
Trimble GuidEx uses an integrated GNSS and inertial navigation system (INS) to compute a virtual reference point and precise heading, pitch and roll.
Users can install the Trimble GuidEx system on anything from utility terrain vehicles (UTVs) to heavy equipment, on- or off-road.
Trimble GuidEx provides streamlined design-stakeout navigation that eliminates the need for advance survey stakeout operations. This enables machine operators to navigate to an exact point without stakes or surveyors, such as for core-sampling operations.
Corridor navigation allows users to efficiently complete a range of tasks including clearing paths for access routes and plowing snow. With comprehensive local machine data-logging, contractors can capture a range of data including position, time and speed.
“Trimble GuidEx was built to meet the needs of natural resource exploration activities, but can be used for many other applications,” said Scott Crozier, vice president of Trimble Civil Construction. “This system improves productivity and awareness with easy, efficient, task-specific navigation.”
To ensure work is done exactly where it should be, proximity and zone breach alarms can be set based on custom exclusion and inclusion zones.
Regardless of the equipment or the application, Trimble GuidEx uses customer-provided data to keep operators aware of prohibited or dangerous areas and decrease time and money wasted on unnecessary work.
Trimble GuidEx provides crossline navigation along predefined routes via an integrated software-based lightbar viewed on the display, including visual and audible alarms when operators breach user-defined distances from a centerline. The system also provides point and pad navigation information with intuitive navigational arrows, supported by a wide variety of data recording settings.
Compatible with virtually any machine type, Trimble GuidEx connects equipment to the office to keep everyone aligned. Operators and supervisors can send mapping data to and from the machine and office to avoid rework.
Reliable guidance data allows contractors to track machines by time or user-defined event triggers for a more accurate representation of the machine utilization cost of a project. Trimble GuidEx can leverage real-time kinematic (RTK) and CenterPoint RTX correction services for enhanced high-accuracy positioning.