Read a roundup of recent products in the GNSS and inertial positioning industry from the April 2025 issue of GPS World magazine.
OEM
INS
With three additional GNSS receiver variants

SBG Systems has upgraded its inertial navigation systems — Ekinox, Apogee and Navsight — with new GNSS receiver options. The latest update introduces three additional GNSS receiver variants.
These include:
- Marinestar, which supports Fugro Marinestar, delivering precise point positioning (PPP) with centimeter-level accuracy via L-band corrections without requiring a base station. It is optimized for marine applications.
- HAS Ready / NavIC, which includes Galileo E6 support for the upcoming Galileo High Accuracy Service (HAS), offering free decimeter-level PPP corrections globally. Additionally, it supports the Indian NavIC system.
- Centimeter-Level Augmentation Service, which is tailored for users in Japan; this variant utilizes QZSS L6 signals to provide free PPP corrections without external services.
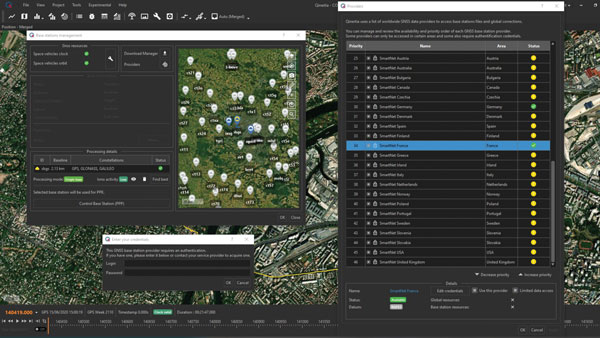
All GNSS variants integrate seamlessly with SBG Systems’ antenna portfolio and Qinertia post-processing software. Users select the appropriate GNSS variant at purchase to match their operational requirements. These enhancements aim to provide versatile solutions across diverse industries while ensuring reliable performance.
Receivers
Can achieve centimeter-level accuracy

The GNSS receivers in the Teseo VI family use multi-constellation and quad-band signal processing on a single chip, achieving centimeter-level accuracy for various applications. The Teseo VI family includes the STA8600A and STA8610A models. These receivers are designed for automotive applications such as advanced driver assistance systems and autonomous driving, as well as industrial uses, including asset tracking, mobile robots and precision agriculture.
The Teseo VI+ variant can host enhanced positioning engines developed by third-party companies, providing real-time kinematics for centimeter position accuracy.
GNSS Module
Operates in challenging environments
The LG680P is a multi-constellation, quad-band GNSS module designed for high-precision positioning and to enhance signal quality and precision through concurrent reception of L1, L2 and L5 frequency bands. It supports Galileo E6, QZSS L6 and BDS B2b signals for precise point positioning, ensuring horizontal accuracy of up to 0.8 cm + 1 ppm without requiring local or broadband connectivity.
To ensure signal integrity in environments with electromagnetic interference, the module features professional-grade anti-jamming technology, including built-in NIC algorithms that suppress narrow-band interference. It supports external active antennas for enhanced signal reception and positioning accuracy. It is ideal for applications such as autonomous lawnmowers, delivery robots, surveying equipment and precision agriculture. Quectel complements it with two external GNSS antennas: the YEGR001W8AH geodetic antenna and the YEGD006U1A compact patch antenna.
Firmware Upgrade
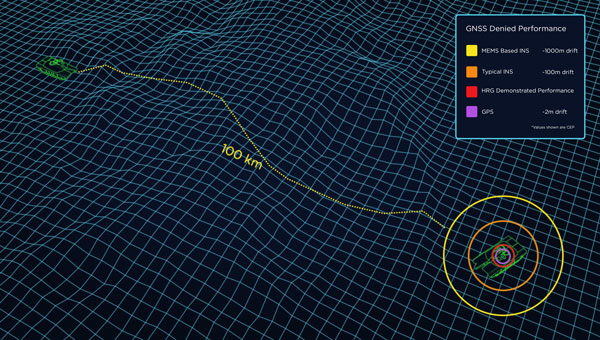
For SBG Systems’ MEMS-based INS

The New Ellipse firmware upgrade for the Ellipse product line allows the system to now be used as an attitude and heading reference system or inertial navigation system. It is designed to enhance navigation, attitude and heave performance for stable and accurate positioning, even in challenging conditions.
It introduces advanced GNSS-denied capabilities, featuring newly integrated flags that trigger when GNSS jamming or spoofing threats are detected. This allows users to reject or re-enable external sensors — such as GNSS — without resetting the filter. The user-friendly interface allows for fast and flexible configuration using simple command lines, enabling users to tailor the Ellipse to their specific needs and applications.
Localization Solution
Operates in GNSS-denied environments

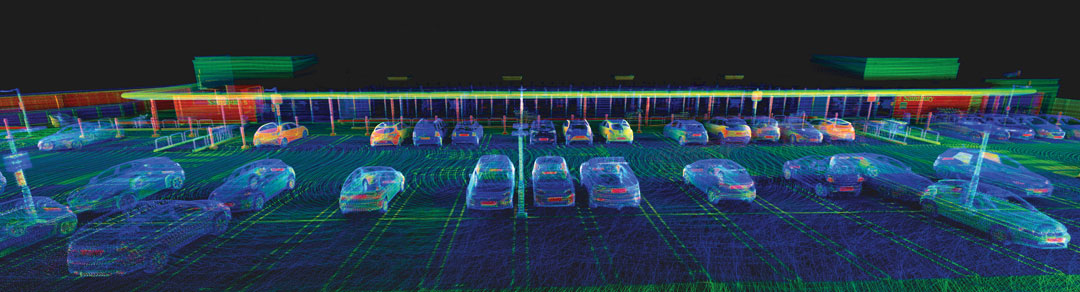
WayFinder is a localization solution designed for GNSS-denied environments. It integrates a GNSS/INS system, onboard processor, lidar scanner and two cameras, enabling precise navigation in areas with limited satellite coverage. The system features Lidar Boost, a software technology that enhances GNSS/INS performance by processing lidar data to compensate for missing or inaccurate GNSS updates in real time. This ensures high-accuracy localization and seamless transitions between GNSS-supported and GNSS-denied environments.
WayFinder enables precise navigation for autonomous vehicles in ports, mining and indoor automotive testing without fixed infrastructure. It also provides reliable positioning for surveyors in areas with limited GNSS coverage.
Survey
Smart Surveying
Introduces topographic design tools
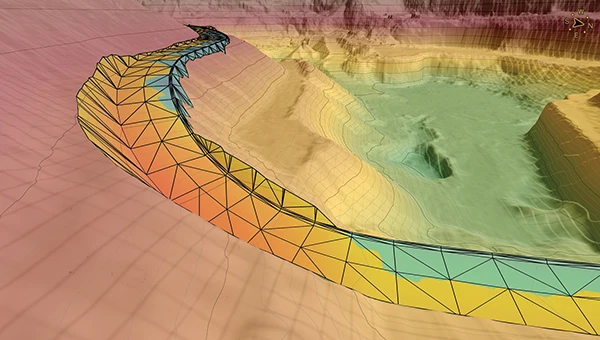
Virtual Surveyor Version 10 introduces Basic Topographic Design tools, allowing users to document terrain changes such as graded roads, water ponds and building surfaces. The software now features four subscription plans — Valley, Ridge, Mountain and Peak.
- Ridge plan: Focuses on surveying a single moment in time using one drone data set.
- Mountain plan: Adds Timelines to compare surveys across different times, visualizing changes through Time Steps.
- Peak plan: Includes advanced Topographic Design tools for planning future structures by creating new Time Steps. These tools allow users to design features such as roads or ponds directly on UAV-derived models, with automated alignment and volume calculations for cut-and-fill operations.
Version 10 introduces drawing guides, available in the Ridge plan and above, enabling precise drawing of points at specific intervals or angles. Walk Mode, included in all plans, allows users to explore 3D terrain at ground level for better visualization. Timelines, featured in the Mountain and Peak plans, facilitate the comparison of multiple surveys conducted at different times and the integration of future designs. These improvements seek to streamline processes for engineering surveyors, supporting applications in construction, mining and water management.
Laser RTK
With a laser range of up to 50 m

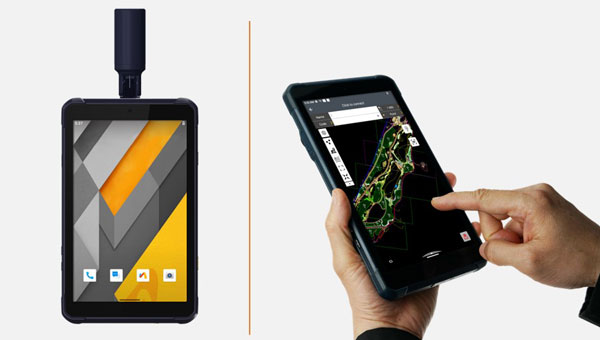
The Jupiter Laser RTK integrates GNSS, auto-IMU, laser and dual camera systems into a single unit. It incorporates a precise green laser that remains visible even in bright daylight. This feature allows for precise measurements of points in hard-to-reach, signal-blocked or potentially hazardous locations. It also features a night vision camera, allowing users to see feature points even in low-light conditions. The RTK system’s laser range is up to 50 m, making it suitable for challenging surveying environments. It incorporates visual technology to offer surveyors an immersive experience during surveying and stakeout operations, improving working efficiency and productivity.
UAV
UAV Software
With new mapping capabilities

Version 2.1.0 of AgEagle Aerial Systems’ eBee VISION application software introduces circular and grid mapping features, allowing users to generate 2D or 3D maps using external post-processing software for more comprehensive geospatial data.
The eBee VISION 2.1.0 can continue missions in GNSS-denied environments and allows manual deactivation of GNSS to prevent jamming or spoofing. It implements the STANAG 4609 standard, the official format for motion imagery exchange within the NATO nations. This involves embedding UAV position and camera information into the videos recorded by the UAV and those broadcasted by the Ground Control Station. Its inclusion in the system seeks to enhance interoperability with third-party applications, which is key for military-grade UAVs.
It offers enhanced control over the Silent Tactical Landing feature. Users can now manually adjust the landing position on the map, with the system providing range estimates to inform operators of the UAV’s reach. This functionality offers greater flexibility in mission planning and execution, particularly in tactical scenarios requiring precise landing control. The system is ideal for defense, public safety and utilities applications.
‘Drone-in-a-Box’ Solution
Designed for vehicle-mounted deployments

The DJI Dock 3 “drone-in-a-box” solution is designed for vehicle-mounted deployments and 24/7 remote operations in various environments. This system is compatible with the Matrice 4D and Matrice 4TD UAVs, which feature advanced cameras and IP-rated protection for challenging conditions. The UAVs are ideal for public safety, emergency response and infrastructure inspection.
This system supports flexible deployment options, including vehicle-mounted setups optimized for emergency operations and long-distance inspections. It enables horizontal calibration and cloud-based dock location adjustments. Two docks can be mounted on a single vehicle to facilitate dual-UAV rotations for enhanced efficiency. In fixed deployments, the D-RTK 3 Relay Fixed Deployment Version can be added to improve video transmission and satellite connectivity.
The Matrice 4D and 4TD UAVs have a wide-angle camera, medium tele camera, tele camera and laser range finder. The Matrice 4D features an advanced camera suite designed for high-precision mapping. The Matrice 4TD includes an infrared thermal camera for public safety and emergency response applications. The system includes a Flight Termination System to support regulatory compliance in strictly controlled airspace. This system can manually or automatically stop drone operations if necessary.
Software Upgrade
Enables 24/7 BVLOS operations

Casia G Release 4.0 is a software update that enables nighttime detection of aircraft, allowing 24/7 beyond visual line of sight (BVLOS) UAS operations. The update supports BVLOS flights up to 400 ft at night without requiring hardware modifications, offering detection of both cooperative and non-cooperative aircraft. The system detects aircraft at distances of up to 16.7 km with 360° coverage, ensuring safe nighttime operations. When multiple units are used, triangulation technology provides accurate range, altitude and satellite data for intruding aircraft. The update leverages existing hardware to detect navigation and anti-collision lights at night.
Marine Radar
With W-band radar technology

The MAS10 is a 77 GHz FMCW marine radar system designed to enhance navigation safety in congested environments under all weather conditions. The ultra-high-definition W-band radar provides centimeter-level resolution, enabling vessels to detect and identify small hazards in heavily trafficked waterways.
Unlike optical and infrared sensors, W-band radar technology penetrates fog, heavy rain and snow, ensuring reliable detection. It operates effectively in low-visibility scenarios, including complete darkness, intense sunlight and shadowed areas where cameras and lidar may struggle.
Mapping
New 3D Scanners
Available in two versions
The Eagle Series line of spatial 3D scanners feature lidar and imaging sensors and are designed for various applications, including reverse engineering, digital twinning, asset management, extended reality, precision mapping and 3D printing.
The series offers scanning capabilities with a range of up to 140 m and precision within 2 cm at 10 m. The lightweight scanner is designed for portability, with a built-in battery providing up to one hour of continuous use.
The scanners are available in Standard and Max versions. The Max model features four 48 MP cameras, enhancing scanning efficiency and producing vivid 8 K panoramic photos. With a point cloud frequency of 200,000 points per second, the Eagle Series is designed for applications requiring highly detailed spatial data.
Upgraded Mapping Package
With Google Maps downloads
Golden Software has upgraded its Surfer mapping and 3D visualization software. Users can now directly download georeferenced aerial and satellite imagery from Google Maps into projects. The latest version also improves 3D visualization tools, focusing on faster and more intuitive creation of visual models. Users can now colorize 3D drill hole intervals based on text keywords, making it easier to interpret subsurface data. Additionally, contour slices can now be added to the 3D view, offering a clearer representation of data layers.
Golden Software has released a beta version (30.0.135) that introduces multiple light sources for improved 3D viewing and customizable legends for better map presentation. These updates are designed to streamline workflows for professionals in industries such as environmental consulting, resource exploration and geospatial analysis, simplifying the creation of professional-grade maps and models efficiently.