CHC Navigation (CHCNAV) has released the AlphaAir 6, a flagship airborne lidar system designed for UAV-based laser scanning, drone lidar mapping, and aerial surveying in high-relief and complex terrain.
Combining prism scanning technology with a high-grade inertial navigation system (INS), the AlphaAir 6 delivers a maximum ranging capability of up to 2,100 meters and supports efficient data capture at typical flight altitudes of 400 to 600 meters above ground level.
The AlphaAir 6 integrates an upgraded laser engine and a high-grade IMU with 0.3°/h bias stability to improve trajectory accuracy and point cloud quality. This design removes the need for pre-mission IMU calibration and supports stable, efficient data collection for topographic mapping, corridor mapping, and wide-area aerial survey workflows.
The AlphaAir 6 combines fifth-generation real-time waveform processing with advanced multi-period technology to capture richer, denser, and more precise lidar data across complex terrain, vegetation, and built environments. According to CHCNAV, even at an ultra-high pulse repetition rate of 2,000,000 pulses per second, it continues to support real-time point cloud output, giving operators immediate in-flight visibility and a faster path to survey-grade 3D results.
To meet different project requirements, the AlphaAir 6 is available in single-camera and dual-camera configurations. Both options use large-format CMOS sensors to deliver high-resolution imagery, while the dual-camera version adds an ultra-wide field of view to improve image coverage and increase mapping efficiency.
With an integrated design and a weight of 1.35 kg, the AlphaAir 6 reduces payload burden on UAV platforms and helps extend flight endurance. Open interface protocols support integration with mainstream multirotor and fixed-wing UAVs, giving surveying and mapping professionals more flexibility across different mission types.
Honeywell has launched the HGuide i700, an inertial measurement unit (IMU) that delivers high-accuracy performance for unmanned air, land and sea vehicles. By pairing near navigation-grade capability with a no-license-required (NLR) classification, the HGuide i700 provides integrators worldwide with a powerful new option for critical sensing and navigation.
The HGuide i700 uses high reliability sensors and electronic architecture found in Honeywell’s HG3900 inertial measurement unit (IMU). Compact and low power, the HGuide i700 delivers near-navigation-grade accuracy and reliability while being optimized to support longer range navigation in GNSS-denied environments
“As customers explore new autonomous, robotic and precision-guided solutions, they want the accuracy and reliability of inertial systems that can be tailored to their program requirements,” said Matt Picchetti, vice president and general manager, Navigation and Sensors, Honeywell Aerospace. “The HGuide i700 offers strong GNSS-denied performance for by limiting maximum acceleration and spin rates in a license-free package that simplifies the complexity of system development while preserving reliability.”
The latest in Honeywell’s HGuide suite of no-license inertial solutions, the HGuide i700 allows customers to streamline development cycles, simplify system architecture and transition to field deployment more quickly than existing technology.
The HGuide i700’s rugged design, compact size and low-power profile make it suitable for diverse commercial, industrial and defense applications, such as:
Unmanned aerial, land or sea vehicles
Mobile mapping and surveying systems
Long duration unmanned ground or surface platforms
Robotics and industrial automation
Stabilized payloads and pointing systems
Honeywell has been a top innovator in IMU technology for more than three decades and pioneered the use of MEMS technologies in navigation. For more information about the Honeywell HGuide i700 and Honeywell’s navigation solutions, visit Honeywell Aerospace.
Firmware upgrade available for Xsens Sirius and Xsens Avior motion sensors delivers centimeter-level vertical displacement measurement for marine stabilization and control systems
Xsens has announced a major capability upgrade for its industrial-grade Xsens Sirius and Xsens Avior inertial measurement units (IMUs). The new Heave feature delivers centimeter-level vertical displacement measurement, enabling real-time stabilization and wave compensation in a wide range of marine applications.
Marine engineers can now access comprehensive motion data — roll, pitch, yaw and Heave — from a single compact sensor. This eliminates the need for external processing or for oversized tactical-grade systems while maintaining the precision required for offshore platforms, vessels, docking systems, marine robots, buoys and surveying equipment.
The Heave output operates at up to 100Hz, providing the real-time response needed in active stabilization and wave compensation systems. All processing happens on-device, simplifying system integration and reducing latency.
Xsens motion reference units (MRUs) — IMUs with Heave capability — deliver real-time Heave accuracy better than 5 cm for wave periods up to 29 s. This covers most marine applications. For longer wave periods up to 40 s, accuracy is approximately 6cm, twice the range supported by comparable industrial-grade MRUs.
“Engineers now get vertical displacement data directly onboard, alongside roll, pitch and yaw,” said Ayush Sharma, Algorithms Engineer at Movella. “This gives marine customers the complete motion reference they need for stabilization and compensation systems, without the size or certification overhead of tactical MRUs.”
The algorithm uses proprietary phase correction and bias estimation to mitigate the effect of drift over extended operating periods. Users can also define offset points — center of rotation (COR) and point of interest (POI) — ensuring that Heave values reflect the true motion of the vessel or payload, even when the MRU is installed away from the POI.
The Heave algorithm is available for download immediately as a firmware update for existing Xsens Sirius and Xsens Avior units in the field, with no hardware modifications required. All new units ship with the feature integrated. Heave output is enabled with a single setting in the MT Manager software or the Xsens software development kit (SDK).
Designed for straightforward integration
Xsens Avior is a compact OEM module for embedded system designs.
Xsens Sirius is a standalone MRU in a rugged IP68 housing for harsh environments. It meets MIL-STD-202 requirements.
Both products support RS-422, CAN, and UART interfaces. Development kits are available for prototyping, with free SDKs for C/C++, Python, ROS1, ROS2, and MATLAB. All units meet CE, FCC, and RoHS regulatory requirements, and are ITAR-free.
Xsens Avior and Xsens Sirius MRUs are available globally from Movella and authorized partners. For specifications, datasheets, and ordering information, visit www.movella.com/products/sensor-modules or contact a Movella sales representative.
SatLab Geosolutions has launched a new GNSS receiver, the SL8. The SatLab SL8 Laser RTK combines dual cameras, GNSS, an inertial measurement unit (IMU) and visible laser technology to make surveying faster and easier.
With non-contact measurement, image-assisted targeting, CAD live-view stakeout, and a built-in LoRa radio. It ensures smooth, reliable work even in complex or GNSS-limited environments, SatLab said.
Photo: SatLab
The SL8 achieves 2 cm accuracy within 10 meters and enables efficient data collection across bridges, tunnels, riverbanks, and other sites where traditional GNSS methods are restricted.
It features image-assisted targeting through SatSurv software, displaying laser points directly on real-time images for quick and precise aiming. Its automotive-grade IMU requires no manual calibration or initialization and enhances measurement accuracy by up to 40% in GNSS-challenged areas.
A built-in multi-protocol LoRa transceiver provides stable transmission beyond 15 km and compatibility with multiple RTK brands. The integrated CAD and visual stakeout functions combine live imagery with CAD data, allowing users to visualize target points on site and increase layout efficiency by up to 50%.
Accurate localization underpins modern mobility, powering everything from precise rideshare pickups and efficient deliveries to augmented reality and autonomous systems. Yet achieving reliable sub-meter precision with commodity hardware remains one of the field’s central challenges.
A range of technologies are being explored to improve positioning, such as real-time kinematic (RTK) and Precise Point Positioning (PPP) corrections, 5G methods standardized under the 3rd Generation Partnership Project (3GPP), simultaneous localization and mapping (SLAM), light detection and ranging (lidar), inertial measurement units (IMUs), and ultra-wideband (UWB). Each plays a role in specific contexts, but for everyday, mass-market deployment, two paradigms dominate the conversation: visual positioning systems (VPS), which rely on cameras and computer vision to match images against reference databases, and GNSS plus inertial measurement unit (GNSS+IMU) sensor fusion, which integrates satellite positioning with inertial data already present in billions of devices.
These two approaches are not mutually exclusive. VPS works best in dense urban areas where GNSS can struggle, while GNSS+IMU excels in the open environments where VPS has fewer features to recognize. In practice, VPS even depends on GNSS to help narrow the search space in its visual database. That makes the two technologies natural complements, and together they provide the building blocks for the next generation of spatial intelligence.
The Role of VPS
VPS use computer vision to determine position relative to known landmarks. In favorable environments – especially dense, feature-rich urban settings — they can deliver impressive accuracy. VPS has been successfully applied in AR anchoring, pedestrian navigation, and even some indoor mapping, offering a level of precision that is difficult to match with GNSS alone.
At the same time, VPS faces challenges that limit its ability to scale as a standalone universal solution. Maintaining vast libraries of reference imagery requires constant collection and refreshing, even for companies with resources such as Google’s Street View. Keeping cameras active and running neural network matching consumes power and compute, with AR and navigation apps often showing rapid battery drain when vision pipelines are engaged.
Performance can also be fragile, with accuracy dropping in low light, bad weather, or environments with limited features such as open fields or glass-heavy corridors where reflections distort recognition. Because VPS requires continuous camera use, it also raises privacy concerns under regulations like GDPR.
But VPS still fills an important feature set: it works best in exactly the environments where GNSS struggles most. In dense urban areas with abundant visual features but heavy multi-path interference, VPS provides a complementary capability that enhances overall localization performance when paired with GNSS+IMU.
GNSS+IMU Fusion
GNSS provides global reach, but smartphone accuracy typically ranges from 3m to 5 m. This may be adequate for turn-by-turn navigation, but it does not meet the precision required for lane-level guidance, pedestrian navigation or building entrances. Pairing GNSS with IMU data changes that equation by adding orientation and motion context.
Sensor fusion combines GNSS position (x, y, z) with IMU-derived orientation (α, β, γ) to deliver six degrees of freedom (6DoF). In practice, this allows devices to determine not only where they are, but also which way they are facing, which is critical for navigation and AR anchoring.
Another key advantage is that fusion also runs efficiently on-device, using low-power sensors already embedded in nearly every phone. It avoids the battery drain and compute overhead of vision-based methods, remains resilient in poor visibility, and largely sidesteps the privacy concerns associated with continuous camera use.
Together, GNSS+IMU and VPS offer complementary strengths: GNSS+IMU provides scalable global coverage, while VPS adds value in dense urban or visually rich environments. Used in tandem, they extend reliable sub-meter localization across a far wider range of real-world scenarios.
Performance in Field Tests
Independent field testing has underscored the impact of GNSS+IMU fusion in real-world conditions. In trials conducted in Louisville, Colorado, standard smartphones relying solely on GNSS averaged ~1.9 meters of error. When collaborative corrections and IMU fusion were added, mean error dropped to ~0.55 meters – a more than threefold improvement.
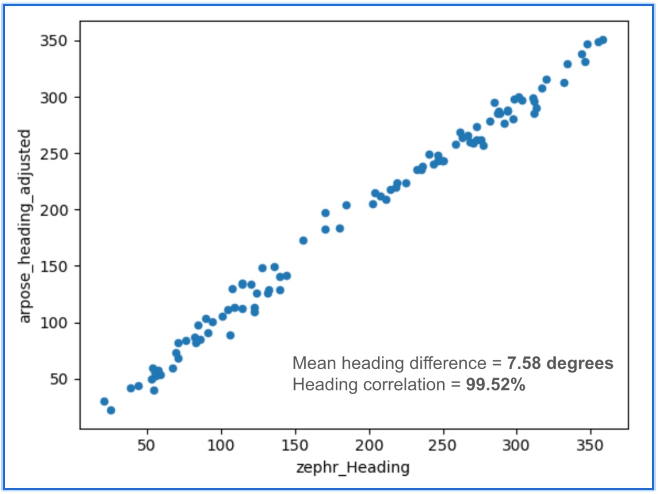
To benchmark localization performance against visual methods, we compared heading determination from Zephr’s sensor-based approach with Google’s VPS, widely considered an industry leader in vision-based localization. Using the same device and location, headings generated from ArPose and Zephr were plotted against VPS outputs.
Figure 1: The figure shows a strong correlation, with a mean heading difference of just 7.58° and a heading correlation of 99.52%.
The results in Figure 1 show a strong correlation, with a mean heading difference of just 7.58 degrees and a heading correlation of 99.52%. This provides a useful benchmark, illustrating that sensor-based approaches can achieve heading accuracy on par with vision-based systems while avoiding the data, compute, and privacy burdens tied to continuous camera use.
Head-to-Head Comparison
When considered side by side, VPS and GNSS+IMU reveal distinct strengths. VPS delivers high accuracy in dense urban environments, where GNSS can be degraded by multipath or blockage. GNSS+IMU, meanwhile, provides consistent global coverage and efficient performance in open environments where VPS has fewer features to recognize. Taken together, they form a complementary toolset, with each addressing the other’s gaps.
Cost & Infrastructure: VPS offers detailed visual positioning but requires continuous investment in capturing and updating reference imagery, which can run into petabytes of data and demand large-scale cloud storage. GNSS+IMU leverages existing satellite constellations and commodity sensors already embedded in smartphones, scaling naturally without additional infrastructure.
Battery & Compute: VPS enables precise landmark recognition but must keep cameras active and process high-resolution frames, a pipeline that consumes energy and compute. GNSS+IMU fuses lightweight sensor readings on-device, sustaining real-time performance with minimal power. Hybrid systems can use VPS selectively for visual anchors when power budgets allow.
Environmental Robustness: VPS excels in dense urban cores where landmarks are abundant, but its performance can degrade in low light, heavy weather, or feature-poor settings such as highways or open fields. GNSS+IMU continues to perform in most outdoor environments, with IMUs bridging short GNSS gaps in tunnels or urban canyons. Together, they extend reliable coverage across diverse conditions.
Privacy: VPS provides visual context but depends on continuous camera feeds, which can raise concerns under regulations like GDPR and CCPA. GNSS+IMU relies solely on inertial and satellite data, which can be anonymized and processed on-device. Privacy-conscious applications may favor GNSS+IMU as the default, while invoking VPS in controlled contexts.
Scalability: VPS delivers strong results in mapped geographies but is constrained by the cost of collecting and maintaining visual data globally. GNSS+IMU scales as more devices ship with standard GNSS receivers and inertial sensors, with accuracy improving further when devices contribute corrections to a shared network. In combination, VPS can add value in high-density urban corridors where visual richness offsets its infrastructure demands.
Beyond Accuracy: Spatial Intelligence Without Cameras
GNSS+IMU fusion not only narrows positioning error but also provides contextual awareness. By combining positional vectors with device orientation, systems can determine not just where a device is, but what lies within its field of view.
This contextual layer enables landmark-aware navigation and natural AI interactions. Instead of vague coordinates, users could be guided to “meet at the blue mailbox next to the coffee shop entrance.” In AR, digital content can be anchored to the physical world without the overhead of vision-based methods. And for AI interfaces, assistants could answer spatial queries (“Is the restaurant to my right or left?”) with precision that feels intuitive.
While GNSS+IMU avoids reliance on cameras, VPS can still add complementary value by providing visual anchors in feature-rich spaces. Used together, the two methods create a more resilient and adaptive localization system, able to support a wider range of real-world scenarios than either could alone.
A Clearer Path Forward
VPS has proven valuable in research, robotics, and AR demonstrations, particularly in dense urban environments. But its reliance on imagery, heavy compute, and continuous camera use makes it difficult to scale as a universal solution for sub-meter accuracy.
To unlock the next generation of spatially intelligent applications, from context-aware assistants to immersive AR, localization must be both practical and massively scalable. This foundation will come from GNSS+IMU sensor fusion, complemented by vision-based methods where they add value. GNSS+IMU builds on infrastructure and sensors already present in billions of devices, delivers efficient on-device performance, and avoids the privacy tradeoffs of camera-based systems.
As positioning becomes the backbone of spatial AI, the evidence points to a decisive outcome: the future will be multimodal, but the scalable backbone will be GNSS+IMU fusion since it empowers devices to understand and interact with the world reliably, with or without cameras.
Honeywell has been selected by the U.S. Department of Defense’s (DOD) Defense Innovation Unit (DIU) to participate in the Transition of Quantum Sensing (TQS) program. The program aims to accelerate adoption of quantum sensors to address near-term alternative position, navigation and timing (PNT) and intelligence, surveillance and reconnaissance (ISR) applications for the U.S. Joint Forces Command.
Honeywell has been chosen to support the TQS program under two DOD contracts: CRUISE (Compact Rubidium Unit for Inertial Sensing and Estimation) and QUEST (Quantum Enabled Sensor Technologies for MagNav).
“With the growing threat of jamming and spoofing, aircraft and naval vessels on critical missions can no longer rely solely on GPS,” said Matt Picchetti, vice president and general manager, Navigation and Sensors, Honeywell Aerospace Technologies. “Quantum sensors have the potential to augment existing navigation solutions, helping pilots operate with greater confidence. Honeywell’s pedigree in fielded sensors and navigation solutions provide us with a unique perspective to ensure the technology is viable beyond the laboratory.”
The CRUISE program, established by the DOD in partnership with Vector Atomic, will focus on developing quantum sensor-based inertial measurement units (IMUs) to provide a standalone navigation solution without relying on traditional GNSS susceptible to jamming and spoofing. Honeywell will support the development of this quantum-sensor-based technology, which will enable the measurement of acceleration and orientation from an IMU mounted to a vehicle to calculate changes in position and velocity. As a result, it will meet next-generation performance requirements at a lower size, weight and power than existing products.
The QUEST program aims to advance the performance of magnetic anomaly aided navigation (MagNav), which is a GNSS-independent navigation technique that uses quantum magnetometers to leverage measurements of the magnetic field of the Earth as a navigation signal. Through the program, the DOD aims to improve these quantum magnetometers and demonstrate their utility in GNSS-denied flight. Building on its deep expertise in innovative navigation solutions, Honeywell’s main contribution will be to generate novel algorithms that utilize these sensors and improve navigation accuracy.
“As quantum sensor-based navigation technology matures, we believe it not only has the potential to displace existing technologies but will also be a serious disruptor to the inertial and magnetic sensor industries,” Picchetti said. “Most importantly, it could improve navigation in high-stakes environments – enhancing safety, efficiency and overall mission success for the DOD.”
Xsens has launched Xsens Avior, a lightweight, OEM form factor inertial measurement unit (IMU) with a compact 36.8mm x 40mm footprint that offers enhanced performance in a wide variety of industrial and commercial applications.
The Xsens Avior is suitable for products manufactured in high volume thanks to its vertical 10×2-pin socket connector for simple board mounting, and its tolerance of any mounting orientation in all three axes. The product also eases design integration, with UART, CAN, SPI and I2C interfaces on-board and support for RS232 and RS422 via the product’s development kit or an external transceiver.
Xsens has integrated a new generation of sensing components in the Avior, as well as advanced analog filtering for higher stability and noise reduction, resulting in substantially better performance compared to the previous generation product. Heading accuracy is 1° RMS and roll and pitch accuracy is 0.2° RMS. Stability is also enhanced in the Xsens Avior: in-run bias stability in the gyroscope is 8°/hr, and accelerometer in-run bias stability is 15μg.
Weighing 35.2g, the Xsens Avior is enclosed in a robust aluminum housing and has a rating of IP51 and an operating temperature range of –40°C to 85°C. The sensor’s small size, light weight, high performance and robust construction provide value in applications such as drones, 3D mapping, and marine remotely operated vehicles (ROVs).
Flexible product options
The new sensor is available in three versions:
IMU providing calibrated inertial sensor data
Vertical Reference Unit (VRU) providing accurate, calibrated values for roll and pitch, and unreferenced yaw data
Attitude and Heading Reference System (AHRS), providing accurate, calibrated roll and pitch values, and heading data referenced to true North
The Xsens Avior is available in a ready-to-use hardware development kit, and is supplied with free software development kits supporting the C#/C++, Python, ROS 1 and ROS 2 and Matlab environments, as well as full documentation and step-by-step guides to design integration.
Key product specifications:
Typical power consumption: <0.5W
Maximum output data rate: 400Hz
Gyroscope full range: ±300°/s
Accelerometer full range: ±8 g
Magnetometer full range: ±8 G
Fully supported in the MT Software Suite development environment
Trimble and InvenSense, a TDK group company, will work together to deliver an advanced navigation solution that combines the Trimble ProPoint Go engine and Trimble RTX correction service with TDK’s SmartAutomotiveinertial measurement units (IMUs) module from InvenSense.
The solution is expected to provide greater accuracy and reliability in positioning and navigation across various automotive and IoT applications.
The Trimble ProPoint Go positioning engine is designed to deliver high-accuracy position and orientation data by utilizing internationally accessible Trimble correction services. With quad-frequency GNSS signal support and Trimble ProPoint Go’s first-in-market Automotive Safety Integrity Level-C (ASIL-C) certified correction data, this positioning ecosystem helps companies enhance their automated driving capabilities with a focus on safety. It also helps drive accuracy for IoT applications such as field robotics.
TDK IMUs integrate a triaxal accelerometer and a triaxal gyroscope in a compact six-axis motion sensor to detect the linear acceleration and angular velocity of vehicles and objects with superior level of accuracy. With its proprietary six-axis and MEMS fabrication platform, TDK inertial sensors enhance applications possibilities thanks to their high-performance, small-size and low-power features.
“Together with TDK we are bringing the power of high-accuracy and precise positioning along with state-of-the art ASIL-certified sensors to help our customers build innovative solutions for automotive and IoT markets,” said Olivier Casabianca, vice president, advanced positioning at Trimble. “As we continue to expand our positioning services with TDK and other tier one companies, we are powering the connected world while ensuring the safety and accuracy of connected systems.”
Positioning Solutions Built for the Connected World Key benefits of the ProPoint Go positioning engine and RTX correction with TDK’s modules include:
Accuracy. The synergy between the two solutions delivers superior positioning accuracy under all conditions: open sky, urban canyons and indoor, even in harsh environments and among wide temperature variations.
Reliability. Customers can rely on consistent and dependable orientation and navigation data, crucial for applications such as autonomous vehicles, drones and industrial machinery.
Versatility. The integrated solution is adaptable to a wide range of applications, such as automotive positioning, advanced driver-assistance systems (ADAS), cellular vehicle-to-everything (C-V2X), field robotics and unmanned aerial vehicles (UAVs).
“Inertial and positioning data have become critical in enabling automation, improving efficiency and monitoring conditions,” said Stefano Zanella, automotive motion VP and general manager, TDK. “Building on almost a decade of collaboration with Trimble, we are delighted to take our efforts to the next level: by offering an integrated solution, we empower customers to accelerate deployment, streamline integration and maximize the value of this transformative technology.”
The TDK automotive safety IMU components, developed as SEooC according to ISO 26262, are suitable for applications with requirements up to ASIL-D. In addition to its six-axis solution, TDK provides quality-managed solutions that also include a three-axis magnetometer in a nine-axis solution.
PEAK System has introduced the PCAN-GPS Pro FD, a configurable sensor module for measuring the position, attitude and acceleration of objects. It has a robust aluminum housing suited for measurement in harsh environments.
The device is equipped with a powerful microcontroller (M7/M4 dual-core), a magnetic field sensor, a three-axis gyroscope, a three-axis accelerometer, and the u-blox NEO-M9N satellite receiver for GPS, Galileo, BeiDou, GLONASS, SBAS and QZSS. It delivers satellite navigation measurement data with update rates of up to 25 Hz.
The module transmits the sensor data via two parallel LEMO circular connectors via CAN 2.0 A/B (40 kbit/s to 1 Mbps) or CAN FD (40 kbit/s to 10 Mbps). The PCAN-GPS Pro FD is configured via USB-C using Windows software (included in delivery), after which the module operates as a standalone CAN node. The aluminum profile housing (IP50/IP54 with sealing connectors) ensures high protection and easy integration.
Honeywell has expanded its navigation portfolio with the HG3900 inertial measurement unit (IMU), a lightweight and low-power tactical-grade device with accuracy and reliability comparable to larger near-navigation-grade IMUs.
Honeywell will showcase the HG3900 IMU, along with the rest of its navigation products, at the Joint Navigation Conference in Cincinnati June 2-5, including a feature session on June 4.
The HG3900 is comprised of all-silicon microelectromechanical system (MEMS) gyroscopes and accelerometers, which enables a significant reduction in size, weight and power from comparable IMUs using traditional technologies. Its advanced sensors significantly boost its performance by offering a 20-time improvement over other Honeywell MEMs.
The HG3900 is designed for backward compatibility. As the highly successful Honeywell HG1900 IMU nears its end of life, the HG3900 will be offered in a nearly identical package to enable an easy transition for existing HG1900 customers.
The HG3900 IMU has successfully completed full environmental testing by the U.S. Army and Navigation Technology Associates (NTA), meeting requirements while under demanding environmental conditions including high vibration and dynamic temperature changes.
“Our HG3900 IMU is an ideal solution for customer applications requiring tactical or near-nav grade performance in a small, lightweight package,” said Matt Picchetti, vice president and general manager, Navigation and Sensors, Honeywell Aerospace Technologies. “Extensive Honeywell and customer testing demonstrates that our new IMU offers superior real-world performance in a smaller package.”
IMUs are widely used on aircraft, ships, spacecraft and other applications where precision positioning and navigation are critical. The importance of these devices has intensified considerably over the past decade with the significant growth in autonomous vehicles and other autonomy use cases. IMUs utilize gyroscopes, accelerometers and electronics to determine where a vehicle is, what direction it is going, at what speed and how far it has travelled.
Advanced MEMS IMUs such as the HG3900 are highly resilient and can provide accurate navigation and orientation data with or without GNSS inputs. They can function independently for extended periods when GNSS signals are jammed, spoofed or unavailable.
The design verification process will continue into 2026 with initial production and deliveries to begin in late 2026 or early 2027. Honeywell is accepting orders for pre-production units for delivery in 2026.
On Dec. 20, ComNav Technology launched its Venus Laser RTK, a GNSS receiver with a millimeter-level laser that enables rod-less surveying. This product is a part of ComNav’s Universe Series of GNSS receivers.
Venus Laser RTK comes with an inertial measurement unit (IMU), which can be used in its traditional mode, with a range pole or in laser mode, which does not require a range pole, enabling GNSS surveying beyond typical limitations. In traditional mode, it has tilt compensation up to 60 degrees with an accuracy of 2.5 cm; in laser mode, it has the same tilt compensation but an accuracy of 5.5 cm.
This GNSS receiver is powered by a SinoGNSS K8 high-precision module, capable of up to 1,590 channels. It can survey using GPS, BDS-2, BDS-3, GLONASS, Galileo, QZSS, and SBAS constellations.
Other features include Bluetooth connectivity, more than 20 hours of battery life, and the fact that it is dust and waterproof. Venus Laser RTK can also withstand harsh environments and is designed to survive more than a two-meter drop.
On Jan. 4, TDK Corporation announced the addition of the IIM-42653 and IIM-42652-I platforms to its InvenSense SmartIndustrial family of compact and low-power sensor platforms. IIM-42653 and IIM-42652-I consist of 6-axis IMUs, which target industrial and navigation applications requiring high force sensitive resistor (FSR) performance or inertial navigation software.
The IIM-42653 platform—a robust, low-noise, low-power, 6-axis IMU—is capable of a gyro-programmable output of 4,000 dps and an accelerometer-programmable output of 32 g. These features make IIM-42653 ideal for applications including industrial-grade or high-end automated guided vehicles, automated mobile robots and unmanned aerial vehicles.
The IIM-42652-I platform, a compact 6-axis IMU, offers hardware authentication and can be integrated with TRACK dead reckoning software from Trusted Positioning, a TDK Group company. The TRACK software, which is available for purchase through a licensing agreement, filters GNSS multi-path errors and provides a continuous navigation solution when GNSS signals are unavailable.
IIM-42653 is available now for select partners and customers only and will be available at TDK distribution partners in April. IIM-42652-I is available now at InvenSense-authorized distributors.