Tactical-grade IMUs enable UAVs to achieve the same locational accuracy as ground-based systems. (Photo: CHC Navigation)
We often hear the anecdote about an early lidar scanner that could take a shot every few seconds, yet it held a value proposition for certain applications. As the capabilities of successive mapping and surveying systems change rapidly, so does the conventional wisdom about which are best for various applications. Transportation corridor mapping — be it for improvements design, as-built surveys, asset management or digital twinning — has always been a balancing act between precision and efficient large-scale data capture.
“I remember 15 years ago, during my university time, the scanner was the size of a dining table,” said Andrei Gorb, segment manager for mobile mapping and unmanned aerial vehicle (UAV) systems, CHCNAV. At the top end of the mapping food chain were terrestrial scanners, targets, bore sighting, and registering point clouds mostly manually. As cumbersome and time-consuming as the legacy tools and methods were, these options still offered efficiency gains compared to conventional surveying with total stations. Then a decade ago, mobile-mapping systems began to change that paradigm. Departments of transportation found that mobile-mapping systems could meet their requirements for many design projects, and certainly for asset inventory and management. Unmanned aircraft systems (UAS) were not quite there yet.
The tech used depended on the application. “First, there was road maintenance, to understand the road condition,” Gorb said. “Previously, UAS did not meet the high requirements: centimeter in absolute and millimeter in relative. We now have mobile-mapping solutions, from us and other suppliers, that can be in the 8-9 mm absolute accuracy range on short road surfaces.” Yet for many transportation applications, the absolute accuracy may not be as important as the relative precision. This is where years of development in UAS has made the difference.
CHCNAV was not alone in recognizing that the gap was closing, and the company planned ahead. “Previously, UAS would fly for under an hour, and were mostly carrying cameras or early lidar, which was not suitable for highways,” Gorb said. “A few years of development, and we see it is practical to meet requirements with UAS flying between 50 and 100 meters — in Europe, many local regulations forbid flying above 120 meters anyhow.” Gorb attributes the advances to lidar sensors that UAS can carry. These sensors have become much better and less expensive. Plus, platforms like vertical-take-off-and-landing (VTOL) systems can stay in the air much longer.
The UAS boom of the past 10 years saw the dominance of consumer-prosumer market UAV platforms becoming quite commoditized, with certain vendors gaining majority market share. CHCNAV, instead, sought to develop enterprise solutions, for both mobile and UAS systems — large-platform rotor, fixed-wing and VTOL platforms. The company offers an amalgam of hardware and software, from Riegl scanner heads on some of their mobile-mapping systems to Honeywell inertial navigation systems (INS) for some of their UAS solutions.
Gorb echoes what we hear from many mapping practitioners, saying ground-control points are not as necessary in the densities required for legacy mobile and UAS mapping. He explained that everything from strip adjustments to processing of GNNS/IMU data has tightened both precision and accuracy. “We have a tactical-grade IMU in both our mobile mapping and UAS solutions, for a high-end trajectory,” Gorb said. “So, it means that we can get the same high-accuracy point cloud for highways from the ground and the air perspectives.”
Experts at u-blox discuss how they’re creating a hybrid positioning system for automated vehicles using GNSS and terrestrial radio ranging
By David Bartlett, senior principal engineer, Product Center Positioning, and Stefania Sesia, head of Application Marketing, Automotive, u-blox
There’s so much discussion around automated vehicles in the mainstream press these days, that it’s easy to forget some of the critical enabling technology needs to mature significantly before large numbers of people are being whisked from A to B by completely driverless cars.
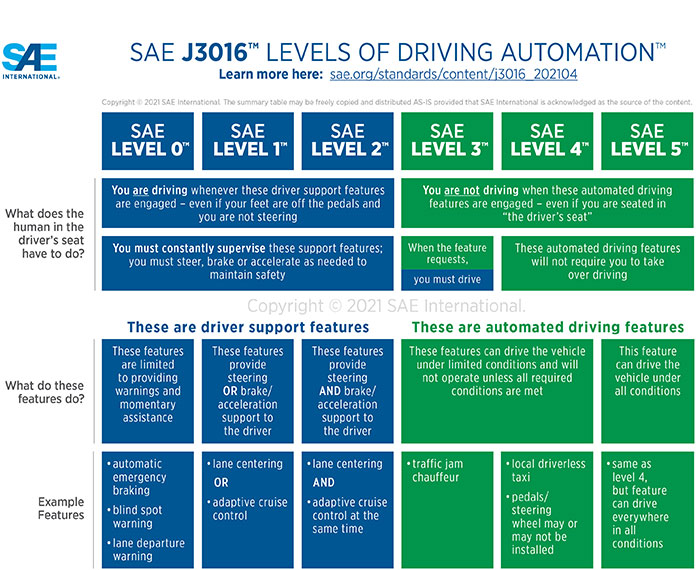
An area demanding particular attention is high-precision positioning. The Society of Automotive Engineers published a six-level automation scale. For vehicles at the higher end of the scale to become reality, they need to be able to reliably pinpoint their location to within centimeters, at all times.
Society of Automotive Engineers’ six-level automation scale. (Image: SAE International)
The positioning systems in most modern cars — which typically use GNSS receivers coupled with an inertial measurement unit (IMU) and the odometer — can’t get close to this level of accuracy. Even in the most favorable conditions for GNSS satellite signal reception, accuracy is between 2 and 5 meters horizontal circular error probable (CEP) without a correction service. In more challenging environments, such as urban areas or indoors, this is significantly reduced.
Using UWB and V2X to complement GNSS
Various solutions are being developed to address this GNSS shortcoming, but all currently have their limitations or don’t offer a solution that’s workable in all environments. Future autonomous vehicles will therefore invariably need to rely on hybrid solutions that blend multiple technologies.
One area where relatively little research has been done to date is in combining GNSS with terrestrial radio signals to enhance automotive positioning accuracy. Cellular vehicle-to-everything (C-V2X), IEEE 802.11p V2X, its successor 802.11bd and ultra-wideband (UWB) can all be used for short-range distance measurements. V2X ITS communications technology is listed as a potential positioning solution in EN 302890 (Intelligent Transport Systems), while UWB technology is gaining momentum for indoor applications, as well as by vehicle manufacturers for keyless entry.
These technologies are all ripe for further investigation as complements to GNSS and IMUs, to ultimately support higher levels of vehicle autonomy. U-blox recently ran a study to evaluate the terrestrial-ranging strengths and weaknesses of IEEE 802.11p V2X and UWB as part of a hybrid solution with GNSS for automotive navigation. Our aim was to establish their feasibility for this application, and identify where further research needs to happen for this type of hybrid navigation solution to become part of future autonomous vehicles.
A terrestrial-ranging system requires a network of fixed ground stations (typically referred to as roadside units, or RSUs, in V2X systems) at known locations. V2X or UWB signals sent out by the vehicle are returned by the RSUs, enabling the vehicle to measure the roundtrip time, and consequently calculate the distance between itself and the anchor point. Do this for three or more RSUs that are geometrically dispersed relative to the vehicle, and you can determine its position.
The need to simulate
Mass deployment of the RSUs required for this type of solution has not yet happened. Installing a suitable network of ground stations in an urban setting on public land wasn’t feasible for our research, in part because the regulatory landscape around UWB in this context is still evolving.
Instead, we set up anchor points around various private estates, from open fields to areas representative of urban environments, such as a business park. We took extensive measurements of the UWB and V2X signals’ behavior in these environments, which enabled us to extract performance statistics such as noise, and subsequently create a behavioral simulation model for the ranging performance.
Our test methodology
Having established our behavioral simulation model for different types of environments, rural, urban and indoor settings, we did a number of real-world test drives. These covered a wide range of driving conditions. We took in high-speed sections of open road, dense urban areas, start-stop congested traffic, numerous corners, and places with limited or no GNSS reception such as tunnels.
During these drives, we collected both GNSS measurements and ground truth. For the former, we used a u-blox NEO-M8L module with built-in IMU. To establish the ground truth, we used a high-grade real-time kinematic (RTK) receiver, GNSS augmentation data service and a high-spec IMU.
We classified each section of the test drives based on the environment — dense urban, tunnel, open countryside and so on — to enable us to apply the appropriate noise models in our simulation.
Next, we allocated RSU positions based on chosen density and placement rules, and added 2 m of random height variation, to ensure we avoided a fully planar deployment. We tested with various numbers of RSUs, to help understand how many would be required to achieve the necessary levels of location precision.
We then set additional simulator variables, such as the accuracy of the timestamp on the ranging measurements.
Having done all of this, we generated simulated ranging measurements between the RSUs and the truth position for every ranging epoch. To these, we added noise on a sample-by-sample basis, and merged the resulting noisy simulator measurements with the GNSS measurements we recorded en route.
Key findings
The output of the simulator enabled us to generate performance statistics that facilitated a comparison between the hybrid GNSS + V2X and GNSS + UWB solutions and a conventional GNSS + IMU solution, similar to those found in mainstream vehicles today.
The table below shows performance of the three solutions.
UWB
V2X (IEEE 802.11p)
GNSS+IMU
Ranging update rate
0.67 Hz
(1.5 s interval)
10 Hz (0.1 s interval)
n/a
Horizontal accuracy
0.1 – 2.5 m (Hybrid)
1.1 – 4.2 m (Hybrid)
1.2 – 5.5 m
Height accuracy
0.4 – 5 m (Hybrid)
5 – 10 m (Hybrid)
2 – 7 m
Frequency of operation
6.5 GHz
5.9 GHz
n/a
Signal bandwidth
500 MHz
10 MHz
n/a
Performance of the three navigation solutions on test.
At a very high level, we found that the GNSS+V2X (IEEE 802.11p) system achieved performance similar to a conventional GNSS+IMU(DR) solution using standard positioning. In situations where there is no GNSS reception, or where this is seriously degraded, an IMU also loses its value, given its reliance on continual GNSS reception to remain aligned. Here, a V2X-based positioning solution would be of value for navigation guidance.
However, more work will need to be done, including into the role of the IMU in high-integrity, high-accuracy positioning, to achieve the levels of accuracy and integrity that autonomous applications require.
The GNSS + UWB hybrid system delivered significantly better performance, approaching the levels that can be achieved using an RTK-based GNSS augmentation service. Our test system ran at 0.67 Hz, and was able to deliver precision close to 10 cm, though we would expect future production systems to align with the more common 10-Hz refresh rate broadly used in V2X.
By pairing a 10-Hz UWB ranging system with a high-accuracy GNSS system using correction data, it should be possible to achieve 10 cm-level accuracy in most situations. GNSS with correction data is already proven to be capable of delivering this level of precision in open areas and motorways. A network of RSUs deployed in urban environments would enable UWB to complement high-accuracy GNSS in situations where satellite reception is challenging.
However, the limited range of UWB, coupled with current regulatory restrictions around outdoor use, limit its usefulness at the present time. That said, micro-navigation in indoor areas, such as parking garages, could be a good fit for this technology.
Other lessons learned
The research brought to light a number of other important findings. First, having even just two RSUs visible, in addition to GNSS, provided significant benefit in the hybrid solution.
Second, height variation in the RSUs is essential if the navigation system is to determine the vehicle’s height accurately, particularly with V2X technology. This will be particularly important when it comes to enabling vehicles to safely operate where there are different levels of road one above the other, such as at multi-level junctions.
Third, we were successfully able to build a hybrid filter to process the signals from the V2X, UWB and GNSS systems, and seamlessly handle the transition between areas with GNSS only (where there were no RSUs deployed) and terrestrial ranging only (such as tunnels).
Fourth, despite the promise it showed for this application, terrestrial ranging is far from immune to environmental effects and multipath. Even UWB would sometimes suffer from non-line-of-sight signal propagation.
Finally, accurate time alignment between the GNSS and terrestrial ranging measurements also emerged as a critical factor. Where we had initially anticipated that alignment to within a few milliseconds would be sufficient, in reality we found we needed to be below 100 microseconds.
What next?
This research has shown the potential of using terrestrial-radio ranging to complement the existing positioning technologies and services being deployed in vehicles today. That said, more needs to happen, not least on the regulatory front, for this technology to genuinely become one of the enablers of future autonomous vehicles.
Outdoor UWB use needs to be permitted for this application, for example, and there needs to be widespread deployment of UWB-capable RSUs. Moreover, when RSUs of any kind are being deployed, thought needs to be given to their possible use as positioning anchors, rather than simply as communication devices.
In addition, more spectrum and wider channels need to be allocated to V2X. And we need to see positioning primitives and signals incorporated into the V2X standards. (Positioning primitives allow a car to know in what direction it is headed — up/down/left/right — relative to a point of reference. It uses signals from the sensors to calculate these values.)
A related area that merits further investigation is the use of UWB ranging to protect vulnerable road users such as people walking, wheeling and cycling. With modern smartphones and cars both now including UWB technology, there are opportunities to use this to make autonomous vehicles more aware of the position of people in their surroundings.
If you’d like to find out more about the research, our methodology, or the results, we’d be delighted to discuss these with you. Please email [email protected] to get in touch.
Other sources, such as lidar, can be used to aid navigation in the absence of GNSS signals. (Photo: OxTS)
We discussed complementary PNT with Peter Rylands, senior product manager at OxTS.
What are some of the most promising approaches to complementary PNT and how does simulation technology help?
There are two approaches of particular interest. The first is looking at LEO satellite systems that can provide supplementary and potentially more secure methods of navigation, with global coverage from a single system. But these will still suffer from some of the issues GNSS systems experience, namely, what happens when you can’t obtain a signal?
The second is the use of visual aiding through sensor fusion, such as lidar and cameras, that can provide relative positioning (or absolute positioning once you have a space mapped) using SLAM algorithms. While this may increase onboard hardware dependencies, it creates a localized navigation system that can be better protected from malicious actors.
In contrast, closed-loop systems can look to an infrastructure-based system, allowing free movement within the specific area in which the infrastructure is located and a potentially more reliable source of PNT, especially indoors, where GNSS is not available. Ultra-wideband is definitely the up-and-coming technology here, but systems using Wi-Fi, cameras, Bluetooth and others also are being used.
Simulation, as within many domains, allows users to test on a large scale with fewer barriers to entry than real-world testing and an ease in making iterative changes to find an optimal solution. Whether that is to benchmark performance in locations of interest or to change configuration settings to improve visibility or positioning, simulation allows you to do this without the expense of going straight into the environment itself or configuring the actual vehicle under test.
How does OxTS fit in that mix?
OxTS provides customers with the ability to navigate anywhere; whether for reference data in R&D, georeferencing for survey and mapping, or active navigation of autonomous solutions. To do this we provide an IMU-first offering that we then complement with other technologies. Traditionally, this is with GNSS, to form an INS that can provide centimeter-level accuracy. However, we are also aware of the vulnerabilities of GNSS. For us, this is when it becomes an unreliable source of PNT in denied areas, such as indoors, in urban canyons or under tree canopies.
Because of this, we are also investigating and developing complementary solutions that can enhance our offering for users who need confidence in their position even when GNSS is not available. Whether that is through sensor fusion, our Pozyx UWB solution for indoor navigation or other proprietary software and firmware capabilities.
What kinds of complementary PNT are most useful in addressing specifically the challenges posed by jamming and spoofing and how does simulation help?
We need to look at systems that cannot be impacted by, or have mitigations from, the impact of jamming and spoofing. Solutions that are independent of radio communications or satellite use are then valuable in providing this layer of protection. This is where we could look toward OxTS’s use of IMU technology and visual aiding systems. Simulation technologies would then allow you to run hardware-in-the-loop testing, where the primary GNSS solution can have simulated jamming and spoofing to understand the performance of your complementary and protected systems when GNSS cannot be trusted.
Hi-Target has launched a real-time-kinematic (RTK) GNSS receiver that has an eye for visual positioning.
The pocket-sized vRTK GNSS RTK System is equipped with professional dual cameras to enable non-contact image surveying. It also has an advanced inertial measurement unit (IMU).
vRTK is suitable for non-contact measurements in a variety of hazardous and complex environments. High-quality sensors ensure the stability of the receiver’s accuracy in working status. By combining imagery with high-precision positioning equipment, users benefit from the convenience of visual positioning technology, which allows them to obtain the location of the target with a touch of a finger from a distance.
The lightweight, innovative visual RTK receiver improves the speed of stakeout with its Live View Stakeout function. Non-contact measurement greatly improves the usable range of GNSS and efficient, safe operation, the company said, greatly improving the efficiency of surveyors and engineers.
vRTK Features
The vRTK receives 1,408 channels, including GPS, GLONASS, BeiDou, Galileo, QZSS, IRNSS and SBAS. A new generation of GNSS engine supports the new frequency points B1C, B2a and B2b RTK decoding of the Beidou-3 satellite. The introduction of multi-frequency anti-jamming technology and multi-step adaptive filtering technology features strong signal, high-quality data, fast fix and high accuracy.
The vRTK has a nine-axis IMU module with auto installation for tilt surveying. Users can easily pick it up and arrive at the target point to carry out the tilt survey with an error of less than 2.5 cm within a 60° inclination.
It is compatible with popular modeling software programs and can be used to collect point cloud and 3D modeling data in one step.
A case study describing development and use of the vRTK is available.
Inertial Labs has announced new versions of its Kernel inertial measurement units (IMUs).
The Kernel 110, 120, 210 and 220 are a set of compact, self-contained, strapdown industrial-grade (100 series) and tactical-grade (200 series) IMUs that measure linear acceleration and angular rates with three-axis micro-electromechanical (MEMS) accelerometers and three-axis MEMS gyroscopes.
Fully calibrated, temperature compensated, mathematically aligned to an orthogonal coordinate system, the Kernel 210 and 220 contain 1 deg/hr bias in-run stability gyroscopes and 0.005 mg bias in-run stability accelerometers.
The new Kernel 110 and 120 IMUs will be superseding the existing Kernel 100 IMU. The Kernel 210 and 220 are miniaturized versions of the company’s IMU-P (Professional) tactical unit.
The Kernel series of inertial measurement units are a fully integrated inertial solution that combines the newest MEMS sensors technology. This seamless integration allows Inertial Labs to provide an inertial system with high performance while maintaining a high-value price point. With its compact design and low power consumption, the Kernel IMUs easily integrate in a wide range of higher order systems while consuming very little space and power.
With continuous Built-in Test (BIT), configurable communications protocols, electromagnetic interference (EMI) protection, and flexible input power requirements, the Kernel 110, 120, 210 and 220 are built to be used in a wide variety of environments and integrated system applications. Units have been thoroughly tested to perform in large variations in temperature, high vibration, and shock.
Designed to be used in air, marine and land environments, the Kernel series can be integrated into motion reference units (MRU), attitude and heading reference systems (AHRS) and GPS-aided inertial navigation systems (INS). As a result, Kernel IMUs are suitable for a wide variety of applications such as autonomous vehicles, antenna and line-of-sight stabilizations systems, as well as buoy or boat motion monitoring.
“The new Kernel IMUs represent the innovative approach at Inertial Labs,” said Jamie Marraccini, president and CEO of Inertial Labs. “The high performance and the flexibility to integrate into different systems and applications is what we have striven to provide to our clients with the new Kernel IMU release.”
Collins Aerospace has introduced NavHub-200M, a vehicle navigation system for the international market compatible with military code (M-code) receiver technology. The NavHub-200M is not controlled by the International Traffic in Arms Regulations (ITAR).
Collins Aerospace made the announcement at Eursatory 2022, taking place June 13-17 in Parsis.
NavHub-200M’s message formats and signal modulation techniques ensure faster and more accurate performance for ground vehicles on the connected battlespace, the company said.
NavHub-200M provides assured positioning, navigation and timing (APNT) capabilities while improving overall resistance to existing and emerging threats to GPS, such as jamming and spoofing.
“With GPS-based Selective Availability Anti-Spoofing Module (SAASM) receivers set to become obsolete, it is critical that M-Code receiver technology is made available to ground forces around the world as quickly as possible so they can trust that the signals they receive in a fast-moving, hostile environment are accurate and actionable,” said Ryan Bunge, vice president and general manager, Communication, Navigation and Guidance Solutions for Collins Aerospace. “Our NavHub-200M provides an improved resistance to jamming and interference, as well as advanced security features to prevent unauthorized access or exploitation.”
NavHub-200M also includes the open interface standards and sensor-fusion capabilities required for a GNSS upgrade path, such as that for Europe’s Galileo constellation, as well as the ability to interface with key vehicle sensors such as the inertial measurement unit (IMU) and odometer, among others.
Collins, a leader in APNT solutions for ground platforms, has delivered more than 10,000 navigation systems to military armed forced around the world.
Attendees at Eurosatory can learn more by visiting Collins Aerospace at booth number C523.
Initial value of the contracts is expected to be more than $12 million
Emcore Corporation has been awarded new contracts for the Booster Rate Gyro (BoRG) and Tri-Axial Inertial Measurement Unit (TAIMU) programs for space launch vehicles resulting from its acquisition of the L3Harris Space and Navigation business.
The BoRG program award is a contract valued at more than $12 million for the production of IMUs used for flight stabilization of the booster stage of a multistage launch system. The TAIMU program award is a development contract for the design and qualification of IMUs deployed for navigation and flight control of the upper stage of a multistage launch system.
Pending successful demonstration of required capability and quality, Emcore expects to be awarded follow-on production contracts for TAIMU within the next 12 months.
“We are honored to supply our highest grade inertial navigation equipment for these critical space launch vehicle programs,” said Albert Lu, senior vice president and general manager, Aerospace and Defense for Emcore. ”We look to further our close partnership with L3Harris through successful on-time deliveries for both the BoRG and TAIMU programs,” Lu added.
The acquisition expands Emcore’s inertial navigation product portfolio with the addition of navigation-and strategic-grade gyro and inertial measurement unit products.
Emcore acquired all outstanding assets and liabilities of the L3Harris Space and Navigation business, including all L3Harris intellectual property rights primarily used in the Space and Navigation business, a 110,000-square-foot leased production facility in Budd Lake, New Jersey, and associated production equipment.
CHC Navigation (CHCNAV) has announced the availability of the i83 GNSS receiver, an addition to its premium GNSS receiver series for surveying, mapping and construction professionals. The i83 GNSS is powered by a 1408-channel multi-band GNSS receiver, the latest iStar technology, and a calibration-free, high-end inertial measurement unit (IMU) for faster and reliable field GNSS surveying.
“The i83 receiver combines GNSS and IMU into one single receiver to provide optimal automatic pole-tilt compensation that requires no calibration and is fully immune to magnetic interference. Operators just need to focus on their tasks and no longer need to level their pole vertically,” said Rachel Wang, product manager of CHC Navigation’s Surveying and Engineering Division. “In addition, we designed a high-resolution color display where users can clearly and intuitively get the GNSS receiver status to take full control of their survey operation.”
The third-generation high-gain antenna with the latest advanced CHCNAV iStar algorithm improves GNSS satellite signal tracking efficiency by more than 30%. The i83 GNSS receiver features 1,408 GNSS channels for high performance across GPS, GLONASS, BeiDou, Galileo and QZSS constellations. Its onboard GNSS technology delivers centimeter-level positioning, maintains reliable fixed real-time kinematic (RTK) accuracy, and collects points faster than previous models, even in demanding conditions.
Automatic compensation for pole tilt
The i83 receiver’s built-in IMU automatically compensates for pole tilt, increasing surveying, engineering and mapping efficiency by 30% over conventional GNSS RTK surveying methods. In less than 5 seconds, the 200-Hz inertial module is initialized to ensure survey-grade accuracy over a pole tilt range of up to 30 degrees. Productivity is dramatically increased, RTK usability greatly improved, and potential human error reduced, whether you are an engineer, site foreman or surveyor.
Integrated Wi-Fi, Bluetooth and near-field communication (NFC) modules provide seamless connection to field data controllers or tablets. Integrated 4G and UHF modems enable any GNSS survey mode, from RTK network NTRIP connections to UHF base-rover configurations. GNSS RTK corrections can be accessed or broadcast continuously for accurate positioning in all circumstances.
Users do not need to carry backup or external batteries in the field because of the i83 GNSS’ ultra-low-power system-on-chip (SoC) electronic design and smart power management. The i83 GNSS can operate for up to 18 hours as a GNSS RTK network rover or more than 8 hours as an RTK base station.
The i83 GNSS receiver is available worldwide through the CHCNAV distribution network.
The Mayflower Autonomous Ship (MAS) is set to re-embark on its three-week trans-Atlantic journey in April 2022 equipped with two of Silicon Sensing’s AMU30 inertial measurement units (IMUs). These devices send highly precise motion data to the new ‘AI captain’ that guides the vessel. They also assist in measuring sea surface height as part of detailed scientific analysis of ocean topography.
AMU30 is a micro electro-mechanical system (MEMS) unit with excellent inertial performance, including very good bias stability and low noise characteristics, plus an embedded Kalman Filter-based AHRS (attitude and heading reference system) algorithm. It delivers precise 3-axis outputs of angular rate and acceleration, plus roll, pitch and heading angles, altitude and pressure, and temperature, at 200 Hz — all critical to precise maritime navigation.
“The two AMU30 are used to make real-time, precision measurements of the movement of the Mayflower Autonomous Ship in 6 degrees of freedom (DOF) so that the AI Captain may make minute manoeuvring adjustments to optimise vessel performance in a complex wavefield, while also providing redundant general navigation capability at sea,” said Brett Phaneuf, co-director of the project. “Furthermore, when coupled with optical and RTK (real time kinematics) GPS data, the AMU30 assists the ship in making highly accurate measurements of sea surface height, which are important for studying ocean tides, circulation and the amount of heat the ocean holds.”
The MAS journey across the Atlantic will celebrate the voyage of the original Mayflower some 400 years ago. It is just one element of an extensive scientific data gathering and research programme the vessel will complete in the coming years. The ship is guided by its new AI Captain, built using IBM cloud, artificial intelligence (AI) and edge computing technologies, and uses a hybrid engine that draws on solar power. Working with scientists and other autonomous vessels it provides a flexible platform for deepening understanding of issues such as climate change, ocean plastic pollution and marine mammal conservation. In parallel, the development of marine autonomous systems such as this will transform ocean-related industries such as shipping, oil & gas, telecommunications, security & defence, fishing & aquaculture.
Surveyors used ComNav equipment to construct a hospital in Burkina Faso. (Photo: ComNav)
Line of sight to GNSS satellites is sometimes obscured by buildings and trees, which also cause multipath, as does nearby water. These conditions require an RTK receiver with multipath mitigation. Often, surveying must occur on property corners or on uneven ground, where it is hard to place surveying equipment. For these reasons, reliability and accuracy are essential, especially in harsh environments. Ground control points require 1-2mm accuracy and topo surveys 1-2cm accuracy. Surveying for AEC also requires software that processes digital files.
ComNav has focused on GNSS core technology innovation and applications for 10 years. The Quantum III technology includes algorithms to suppress multipath and supports all GNSS constellations, allowing the users to acquire and keep RTK centimeter accuracy even in harsh environments. The built-in tilt IMU will help where the exact location to be surveyed is hard to reach. For example, the T300 Plus and N Series GNSS receivers support a maximum pole tilt of 60° and keep the compensation accuracy within 2.5cm, making the field work more efficient, convenient and reliable.
With the Survey Master software’s stake-out points, users can import DXF or DWG files directly and the software can stake out the point, line and surface in CAD.
In April 2021, the government of Burkina Faso used ComNav GNSS T300Plus to provide ground control points survey for the construction of a hospital.
The land security and topographic surveying were completed within only six days, less than half the time that had been scheduled for those tasks. This greatly expedited the construction of the hospital and helped with the fight against infectious diseases, including COVID-19.
SBG Systems is introducing the Pulse-40 inertial measurement unit (IMU), a tactical-grade IMU designed for high performance in harsh conditions, but miniaturized for applications where precision and robustness matter in all conditions.
Use cases include warfare systems, satellite communications, robotics, lidar devices, gimbals, cameras and inertial navigation systems (INS).
The Pulse-40 IMU provides six-degrees-of-freedom. It integrates micro-electromechanical (MEMS) three-axes accelerometers and gyroscopes in a unique redundant design that allows the device size to shrink while pushing performance to its maximum.
The Pulse-40 on a development board. (Photo: SBG Systems)
Among the performance specifications, the Pulse-40 features excellent gyro and accelerometer bias instability of 0.8°/h and 6 µg respectively, enabling long dead-reckoning and maintaining excellent heading performance. With sensors featuring extremely low vibration rectification error (VRE), the Pulse-40 is able to sustain high vibration environments, up to 10 g root-mean-squared.
An embedded continuous built-in-test ensures data reliability during operation, a key parameter for critical applications. The Pulse-40 requires no periodic maintenance. An intensive qualification process — including accelerated aging — guarantees that the sensor behavior is stable over time.
Photo: SBG Systems
Main Features
Size, weight and power (SWaP) design: 12 grams, 0.3W Power consumption
Ultra-low noise gyro (0.08°/√h) and excellent gyro bias instability (0.8°/h)
High-precision accelerometers (6 µg)
Low vibration rectification error: shocks and vibrations MIL-STD 810 qualified
High bandwidth (480Hz) and high data rate (2KHz)
Highly tested and calibrated from –40° C to 85° C
No export restrictions
Research Result
SBG Systems’ sensor calibration and validation tools, initially based on a single axis motion simulator with a temperature chamber, have evolved over the years and are now based on 100% automated, multi-axis motion simulators with temperature chambers. The high level of automation mitigates human-error risk and ensures that all the delivered products meet their specifications. Its INS are the result of extensive research in signal processing, micro-electronics, calibration algorithms and sensor qualification, the company said.
With very low gyro noise and bias instability, the navigation performance is maximized in GNSS-disturbed or -denied environments. The Pulse-40 is export license free and ITAR free.
Inertial Labs has launched a new GNSS-aided inertial navigation system. INS-DM is an IP68-rated version of the company’s new generation of super ruggedized units, shielded from electromagnetic interference. The fully integrated device combines the inertial navigation system (INS) with an attitude and heading reference system (AHRS) and air data computer (ADC).
The high-performance strapdown system determines position, velocity and absolute orientation (heading, pitch and roll) for any device on which it is mounted. Horizontal and vertical position, velocity and orientation are determined with high accuracy for both motionless and dynamic applications.
The INS-DM can support multiple types of micro-electromechanical (MEMS) inertial measurement units (IMU) developed by Inertial Labs. The INS-DM also supports other IMUs like the Honeywell HG4930.
The INS-DM uses different multi-constellation (GPS, GLONASS, Galileo, BeiDou and QZSS) GNSS receivers such as the NovAtel OEM7 series or the u-blox F9 series.
The optional ADC is supported by two Honeywell barometric sensors and the ability to support an internal fluxgate or external stand-alone magnetic compass. The INS-DM contains Inertial Labs’ new onboard sensor-fusion filter, state-of-the-art navigation and guidance algorithms, and calibration software.
Key Features
Commercially exportable GNSS-aided INS
3-in-1 strapdown system: INS + AHRS + ADC
Embedded industrial, tactical or navigation-grade Honeywell or Inertial Labs MEMS IMU
Novatel OEM7 or u-blox ZED-F9P high-precision GNSS receiver
GPS, GLONASS, Galileo, BeiDou, QZSS and real-time kinematic signals supported
Total and static pressure sensors for calculating indicated airspeed
SBAS, DGPS, RTK and PPP corrections supported for precise real-time operation
GNSS measurements and IMU raw data for post processing
Advanced, extendable (based on application) embedded Kalman-filter-based sensor fusion algorithms
State-of-the-art algorithms for different dynamic motions of helicopters, UAVs, marine vessels and ground vehicles
Full temperature calibration of all sensing elements
EMC, EMI and ERD protection (MIL-STD-1275)
Environmentally sealed (IP68)
Aiding data: wind sensor, air-speed sensor, Doppler shift from locator (for long-term GPS-denied environments), external position and external heading.
The INS-DM is the result of more than 20 years of Inertial Labs’ experience developing and supplying INS solutions to land, marine and aerial platforms around the world.