NTLab, a fabless microelectronic company based in Belarus, is offering the NT1051 dual-channel multi-frequency (L1/L2/L3/L5) mutli-system (GPS/GLONASS/Galileo/BeiDou) RF front end.
Manufactured in 0.18 um TSMC BiCMOS technology, it provides operability of the GNSS receiver even if interference power is 120-dB higher than the satellite signal.
The chip was designed to bring benefits of high-grade GNSS receivers to portable devices. To allow reliable navigation in the presence of interference, NT1051 has a 1-dB compression point (on RF input) of -40 dBm. This allows stable tracking, even if the interfering signal is 120-dB higher (compared to -160 dB of typical tracking sensitivity) than the satellite signal.
Simultaneously, portable devices require reduced power consumption. There is always a tradeoff between receiver linearity and consumed current, so the task of combining high dynamic range with low consumption was successfully solved in NT1051 architecture, NTLab said. The resulting power consumption is below 60 mW.
To allow dual-antenna receiver configurations, NT1051 has two separate channels with a common fractional frequency synthesizer.
In May 2011, Dinesh Manandhar and Hideyuki Torimoto of GNSS Technologies, Inc., Japan, penned a very interesting article in GPS World titled – Opening Up Indoors: Japan’s Indoor Messaging System, IMES. The opening paragraph of their lengthy article seemingly describes the Holy Grail for the indoor positioning lobby:
“An indoor messaging system (IMES) has been developed to meet the challenges of indoor and deep indoor positioning, as a system that can be implemented in any device that has a GPS/GNSS receiver without hardware modification. IMES can provide reliable 3D position data with a single transmitter device without performing range calculation[s].”
They go on to describe the IMES concept thusly:
“The main concept of IMES is to transmit position and floor ID of the transmitter with the same RF signal as GPS. IMES transmits latitude, longitude, height, and floor ID by replacing the ephemeris and clock data in the navigation message of GPS. A single unit of IMES is enough to get the position data, since the position itself is directly transmitted.”
Now, you don’t have to be a rocket scientist to start thinking about interference and spoofing issues or risks, especially when you read that the navigation message ephemeris and clock data are being replaced by data broadcast by IMES. To be fair, the authors address these issues briefly:
“Since IMES shares the same frequency as [the] GPS L1 band (1575.42 MHz), there is an interference level that IMES may have on GPS signals. This interference has been studied in detail by conducting experiments and simulations. Based on these studies and analysis, various methods have been considered to avoid harmful interference to GPS signal. To avoid such interference, IMES center frequency is shifted by +/– 8.2 KHz from GPS L1 band. This will have the least impact on the GPS L1 band signal. For example, if the IMES signal is –110 dBm (very strong) and the GPS signal is –142 dBm (very weak), the loss of GPS signal (C/N0) due to IMES is less than 2 db. If the IMES signal is –120 dBm and the GPS signal is –142 dBm, there is no loss of GPS signal (C/N0). Based on this analysis, the IMES transmitter power must be controlled such that the maximum power to the receiver does not exceed –110 dBm at a distance of 3 meters from the transmitter. [There are] guideline[s] specified in the QZSS IS document for setting the transmitter effective isotropic radiated power (EIRP) based on location.”
Let’s put these concerns in perspective. I thoroughly enjoyed the article and firmly believe that we desperately need to solve the indoor positioning and navigation problems, especially for our warfighters and first responders. While many of today’s excellent commercial receivers work well indoors near windows and doors, they are absolutely abysmal underground and deep inside large buildings with lots of metal, or in the middle of dense urban canyons such as Tokyo, Japan. Without a doubt, there is a dire need for a system like IMES — or maybe exactly like IMES — but there must be some caveats and stipulations as to how the IMES system is implemented.
Not Alone
Fortunately, I am far from being a lone wolf in voicing my concerns and my position, for once again the conspiracy theorists as well as renowned scientist and policy makers are concerned about IMES and the operating systems they supposedly desire to replace or augment. Chief among them is the Father of GPS, Dr. Bradford Parkinson, who has frequently described improperly operated in-band pseudolites as “…just another name for a legal jammer or spoofer.” Having known Brad for almost 40 years, I am convinced few GPS experts in the world today have as much experience with pseudolites as Dr. Parkinson. Consequently, the very reason that an indoor navigation system such as IMES is needed may well be a portent for why it may well fail, unless it is implemented properly.
It would be easy but extremely tedious to write about the numerous issues facing IMES in a complicated and technical manner. Certainly previous articles have become bogged down in minutia, and I want to avoid that. It is actually very simple. The issues are fairly straightforward and should be faced head on and not hidden in the midst of tech-speak lingo, legal jargon, policy minutia or politics. So lets dive straight in, shall w,e and make sure these issues see the light of day?
Interference
There can be no doubt that IMES has the potential to significantly interfere with GPS and QZSS signals. The authors of the IMES article are quite clear concerning the potential for interference, and in their own way attempt to mitigate it with signal power restrictions. Their example of a small three- to four-story building with IMES transmitters may indeed be adequate for signal power mitigations, but what happens in Tokyo where tall buildings — skyscrapers if you will — abound? When the Tokyo Skytree skyscraper opened to the public in 2012, it was then listed as the world’s tallest tower and Japan’s biggest new landmark. At over 2,080 feet tall, this is definitely the type of building where one would need an IMES system. With an average of 20 IMES transmitters per floor and weighing in with over 200 floors, we can quickly see that there would be over 4,000 IMES transmitters in this one building alone, all broadcasting simultaneously on or near the center frequency for GPS. Absent stringent regulations and infinite care (the IMES article authors propose that the pseudolite network operator will have the responsibility to continuously monitor each pseudolite and the pseudolite network to prevent interference), and perhaps even with those caveats in place, the GPS L-band noise floor would be such that GPS signals would be incapable of being received.
Now, put 20 such buildings in a ten-block area and the noise floor would be almost incalculable and certainly not predictable. Dr. Parkinson’s fears are realized; your legalized IMES system becomes a distributed network of jammers and/or spoofers. However, technically IMES is currently far from being a legal jammer or spoofer as currently IMES transmitters are not legal to operate in the GPS band at 1559-1610 MHz under the International Telecommunications Union (ITU) Treaty per the International Table of Frequency Allocations of the ITU Radio Regulations. The ITU further states that IMES currently operates on an interfering basis with the co-primary allocations (ARNS/RNSS) in this band, and therefore are in violation of the ITU Treaty. However, Japan’s frequency regulatory agency can develop and implement regulations that allow IMES operations. When this occurs, if not operated within stringent guidelines, IMES could then be considered a legalized jammer or spoofer.
Even the Joint Research Centre of the European Commission, the JRC, states in its Executive Summary on pseudolites that in-band pseudolites pose a significant jamming risk to GNSS receivers. Specifically they state:
Pseudolites or pseudo-satellites are an emerging technology with the potential of enabling satellite navigation indoors. This technology found several applications that are not limited to indoor navigation. Precise landing, emergency services in difficult environments and precise positioning and machine control are few examples where pseudolite technology can be employed.
Despite the great potential of this technology, severe interference problems with existing GNSS services can arise. The problem can be particularly severe when considering non-participating receivers — legacy devices not designed for pseudolite signals. The design of pseudolite signals is thus a complex problem that has to account for market requirements (modifications of existing receivers for enabling the use of pseudolite signals, measurement accuracy, target application), regulatory aspects (frequency bands to be allocated for pseudolite services) and interference problems.
JRC investigates the main aspects to be considered for the design of a pseudolite signal standard minimizing the interference problem without compromising the location capabilities of the system. The focus is on the signal characteristics and topics relevant for the signal design.
Pseudolite or Communications System
The second technical portion of the interference issue revolves around how exactly you define IMES, for when you are dealing with radio regulation agencies semantics matter. Think back to the first paragraph of this article where the IMES authors defined IMES as a messaging system. That certainly sounds like a communications system to me, and others agree. Consequently, the question has been raised and rightfully so: Is IMES a navigation and positioning system, a pseudolite or a communications system? Honestly, to me it sounds like a bit of all three, but if you define it as a communications system, then Japan is seeking to authorize the integration of a communications system with known significant interference issues with GPS signals right in the middle — indeed, potentially on the center frequency of the protected navigation band using terrestrial PRN codes assigned by the U.S. government. If IMES is deemed an indoor pseudolite, then the interference issues are still there. But it is defined as a bonafide PNT system using authorized terrestrial PRN codes. Talk about a bucket of worms!
The issues here are numerous, and they need to be fully addressed to ensure that all those who are potentially affected clearly understand what is being proposed and the risk for the public at large, including who owns responsibility if something goes wrong. I could go on for several pages on this issue alone, but suffice it to say, we do not want to authorize a communications system that is a known and acknowledged GPS interferer right in the middle of the band — or anywhere in the band for that matter. Remember all the issues GPS had in the past several years with a communications system in adjacent bands. So, do we really want a known communications system — or communications system masquerading as a pseudolite, for that matter — with known GPS signal interference issues in the restricted GPS frequency spectrum? The blaringly obvious answer is absolutely not! Yet this is exactly what the IMES authors are proposing not only for Japan, but eventually, if they receive authorization, for other countries around the globe as well. Japan has twice petitioned the U.S. government to make the assigned IMES terrestrial PRN code allocations global in nature. Fortunately, to date those request have been denied.
Dichotomy
Certainly, other countries and companies have noticed this apparent frequency authorization dichotomy and are following suit. For instance the Conference of European Postal and Telecommunications agencies, or CEPT, which is Europe’s regional representative to the World Radiocommunication Conference (WRC), has proposed adding several troubling IMES-related agenda items for the quadrennial WRCs coming up in 2015 and 2019. Even more importantly, these critical issues could be aired in the next three weeks, as the agenda for the 2015 WRC will be largely set at a plenipotentiary conference happening October 20 through November 8 in Busan, South Korea.
There are what I consider to be dangerous proposals under consideration by the ITU (International Telecommunication Union), which should concern GNSS users worldwide. The ITU is the United Nations’ specialized agency for information and communication technologies — ICTs. This is the ITU, where every member state (currently 193) gets one vote, whether they fully understand the technical issues or not and regardless of whether they are a space-faring nation or have a dog in the fight, so to speak. This means that the vote of tiny Saint Lucia counts the same as the United States or Canada or Australia. The ITU charter is to “…allocate global radio spectrum and satellite orbits, develop the technical standards that ensure networks and technologies seamlessly interconnect, and strive to improve access to ICTs to underserved communities worldwide.” Fortunately, the ITU regulations, unlike the CEPT or IMES proposals, wisely require new transmitters proposing to operate in the radio navigation spectrum to operate without causing interference to primary users. Meanwhile, there are member states, countries and companies that want to capitalize on this seeming dichotomy within the global safety-of-life, historically protected, radio bands. Those nefarious efforts, for the future of GPS and GNSS worldwide, need to be stopped in their tracks.
Spectrum is a limited and valuable resource, to say the least, and here fortunately the ITU regulations have it right and do not risk human life, by intruding and potentially interfering with the frequencies used globally by airliners to control, route and land aircraft. I am convinced there are solutions available to us through cooperative efforts with the ITU and other national organizations that will produce pseudolites without causing interference in the protected safety-of-life frequency bands.
When Is a PRN Code Not a PRN Code?
Some of you who are a bit more savvy or have been following this fiasco for some time may now be thinking, what’s the problem, the IMES authors are merely using and proposing further use of U.S. government-authorized terrestrial PRN codes for IMES. This indeed touches on the third thorny issue, which is not only technical but political as well — the use of and authorization to use PRN codes for what is ostensibly a communications system, if you believe the authors of the IMES article, who go to great lengths to differentiate IMES from pseudolites. They continually make the argument that IMES is not a pseudolite, but as we shall soon see, when the U.S. government authorized these specific PRN codes (173-182) for Japan, they were to be used solely for a low-power terrestrial pseudolite program, not an in-band communications system.
Technically, these specific PRN codes assigned to the Japanese for IMES expire in 2017. The authorization of these PRN codes come with numerous restrictions that legally make the codes useful only for the Japanese landmass. This is where the technical, political and operational issues come to a head. We are in for some tough sledding here. However, I will endeavor to make it as simple as possible.
History
In 2007, ten PRN codes were specifically assigned to the Japan Aerospace Exploration Agency or JAXA “for the Indoor Messaging System (IMES) terrestrial pseudolites of the Quasi-Zenith Satellite System (QZSS).” The Memorandum of Agreement from the GPS Wing at SMC (Space and Missile Systems Center) in Los Angeles at Los Angeles Air Force Base (LAAFB) clearly states that the codes are valid for ten years and expire on 19 November 2017, unless a renewal application is filed and approved. Hence, PRN codes 173-182 for IMES were assigned with several crucial caveats and restrictions by the U.S. government that are definitely pertinent to our discussion:
The codes are designated for low-power terrestrial regional applications limited to Japan only.
Although the GPS Wing conducts an initial check on PRN number requests with respect to potential interference issues, the issuance of a PRN number does not convey authority to radiate in the [GPS] band. In order to radiate in the GPS L1 band, the applicant [Japan] shall obtain a frequency assignment from the [Japanese] national authority.
The GPS Wing assumes no responsibility for ensuring systems using these spreading codes follow domestic radio frequency regulations or other applicable laws or regulations, or for ensuring that systems using GPS PRN codes do not cause radio frequency interference.
GPS PRN codes were developed for signals transmitted from satellites, and are not necessarily optimized for use by terrestrial transmitters.
The maximum effective isotropic power for each terrestrial transmitter will be less than -94 dBW.
The QZSS [organization] is responsible for the redistribution of these spreading codes throughout Japan and will limit their use to Japan only.
With all these restrictions, it is difficult to see how the IMES authors could legally use, distribute or promote authorization of IMES and the use of the PRN codes outside of Japan and at the power levels related in the GPS World IMES article. Regardless of the IMES author’s interpretation of the PRN code assignment, the GPS Wing 2007 Memorandum restrictions and caveats are clear, and it cannot be disputed that the codes expire in 2017 unless renewed by the USAF. The PRN codes are restricted to the landmass of Japan even if they are renewed, and if IMES wishes to broadcast anywhere in the GPS band, they need to have permission from their national frequency allocation authority (the Ministry of Internal Affairs and Communications, which is equivalent to the U.S. FCC –Federal Communications Commission) to do so.
The Way Ahead
This is the easy part from my perspective. See if you don’t agree. If the U.S. government is concerned about IMES and what Japan is planning to do with the assigned PRN codes for terrestrial use, the U.S. government through the USAF has the options to:
Rescind the PRN codes immediately.
Insure the Japanese adhere to the caveats and restrictions in the original Memorandum.
Simply refuse to renew or recertify the codes for future use and/or recommend for IMES frequencies that are outside the protected GPS band.
Update and clarify the footnote on the GPS Wing PRN Codes website pertaining to the Japanese IMES PRN Codes with all the restrictions listed in the GPS Wing Memorandum so other countries will realize this is not a global IMES PRN assignment.
Japan is a valuable ally and we need to work together cooperatively, but frankly, the plans laid out for IMES by the authors in the GPS World article must be troubling to those whose job it is protect the GPS spectrum and enforce mutual agreements with our allies. If we were just concerned about a Japanese IMES system, this whole discussion might be moot. However, other countries and commercial companies around the world are watching closely and laying the groundwork for similar IMES and pseudolite incursions into the GPS L-band spectrum — if the Japanese are allowed to proceed and the limited use of PRN codes for IMES is not clarified for all. No one, and I include the Japanese, wants to see this happen if it means interference with GPS, and QZSS for that matter.
Fortunately, where European countries are concerned, there are the ITU regulations. Specifically for GPS and pseudolites, the CEPT regulation has a license condition that requires the pseudolite network operator to submit to the European country regulator confirmation of the terrestrial PRN codes from the GNSS operator before operating pseudolites in the GPS band. So again, the U.S. government wields the hammer here.
Therefore, the U.S. government must act immediately and decisively to put an end to the threats against the protected GPS spectrum caused by the proposed in-band IMES system. At the same time, the Japanese government has an obligation and responsibility to adhere to the letter of the law where the original GPS Wing 2007 IMES Memorandum is concerned.
Finally, the U.S. government must urgently engage cooperatively with the European Union administration and Japan to prevent the authorization and proliferation of interfering devices in the GNSS frequency bands, and to work together to ensure the positive benefits to GNSS from commercializing pseudolite uses outside the GNSS radio frequency bands. GNSS manufacturers worldwide are successfully marketing commercial pseudolites that do not cause interference. In my opinion, this is the way to go both in terms of regulations and governance.
Until next time, happy navigating, and remember GPS is brought to you free of charge by the United States Air Force.
Loctronix Corporation, a provider of positioning, navigation, and timing (PNT) solutions for GNSS-challenged environments, has unveiled the HGX Interference Detection System (IDS) for identifying and monitoring intentional and unintentional interference sources. The IDS is being demonstrated September 10-11 at ION GNSS+ 2014, in Tampa, Florida.
“The IDS can detect sources of interference ranging between 5 dB and 60 dB GNSS jamming to signal (J/S) ratio. Featuring a novel profiling function, the IDS not only detects, but can identify the type of interference given a database of known/previously recorded profiles,” stated Michael Mathews, Loctronix’ CEO and founder.
According to Mathews, “The greater dependence of GNSS within critical infrastructure — including, transportation, communications, finance and the growing availability of jammers — requires new tools to respond to potential threats. The IDS is the first tool to combine the powerful capabilities of Loctronix Spectral Compression Positioning (SCP) technology for identification and characterization of signals with traditional GNSS signal processing to provide full situational awareness of GPS/GNSS operations. The IDS system will benefit government, military, and commercial/industrial applications wherever there is a critical dependence upon quality GNSS data.”
The IDS was developed using the Loctronix HGX hybrid sensor toolkit along with the company’s ASR-2300 ASR Workbench software defined radio platform. The standard implementation supports L1 GNSS bands and measurement rates of 10 measurements per second. Partner-licensed custom/solutions can support multiple bands (such as L2, L5) with greater bandwidths and measurement rates. Multiple sensitivity modes enable monitoring of sub-thermal and high-power interference.
The HGX toolkit API will be available for specialization of the system for custom/embedded applications and adaptation to other hardware platforms. Visit Loctronix in Booth 422.
Calling it an “unprecedented and deeply worrying total disruption . . . [that] shook the industry,” Locata Corporation reiterated its call for redundant terrestrial systems to back up GNSS in the wake of the April 1 11-hour GLONASS system outage.
Nunzio Gambale, Locata CEO, said “We have been telling the industry for years that you cannot have a critically important capability like GPS without also having a backup! What is Plan B if the satellite systems fail? What replaces the space signal when there is a problem? If anyone needed a sign to understand why Locata has spent years inventing and developing the world’s first local terrestrial equivalent of the GPS system, then last week’s meltdown of a complete global satellite navigation system is it. This event should terrify every nation, government, and company that depends on navigation satellites for their business or, in some cases, their very lives.”
The navigation and timing functions of the global positioning systems underpin the world’s banking systems, stock exchanges, digital TV and Internet, cell phone networks, and, in some cases, the national electricity supply, Locata pointed out. GPS, in particular, plays a crucial role in transportation, shipping, and logistics, serving as the enabling technology for critical functions like air traffic control. Reliability is therefore not just important; it is essential across all applications. Locata, the Resilient Navigation and Timing Foundation (RNTF) in Washington, D.C., and others have persistently called attention to the need for redundant terrestrial systems that will back up expensive, vulnerable, and aging global satellite navigation constellations while simultaneously providing the local control and resiliency that satellite-based systems cannot deliver.
Professor Chris Rizos of the School of Civil and Environmental Engineering at the University of New South Wales stated that “This catastrophic failure of one of the world’s two global satellite navigation constellations is a wakeup call for all of us. We ignore the possibility of these ‘Black Swan’ events at our own peril.”
The GLONASS disruption was felt around the world, immediately upon its origination, especially in professional applications, such as tractor automation for farming, machine control and robotics in mining and heavy industry, and in the national infrastructure used by surveyors and industry across many countries.
“This shows just how interlinked the physical and cyber worlds have now become,” added Professor Brett Biddington, a space and cybersecurity expert from the School of Computer and Security Science at Edith Cowan University, Australia. “The prospect of a software glitch, whether unintentional or intentional, seems highly likely [as a cause for the failure]. If it was a deliberate attack, however, it points to a changing face of warfare where the real enemy may be impossible to detect and deter until very damaging strikes, such as an attack on the GPS system, have already taken place.
“The vital point here is that this is no longer just a question for scientists and technologists. A locally controlled backup system for this essential signal is a national policy question of the highest order.”
Locata Corporation and other industry authorities have long testified on global satellite navigation vulnerabilities and the need for diverse technology options to strengthen and back up GPS, GLONASS, and other systems. Locata developed a robust solution and has been awarded a sole-source contract by the U.S. Air Force (USAF) to provide its terrestrially based alternative positioning for military applications where GPS has been completely jammed. The first wide-area Locata system is being deployed now at the White Sands Missile Range in New Mexico. The USAF demonstrated that the White Sands Locata network delivers what has been extremely high accuracy over a 2,500-square mile area, positioning aircraft flying up to 35 miles away to an accuracy of better than six inches.
A pair of LocataLite transmit antennas overlook a section of the White Sands Missile Range blanketed by the Locata high-precision ground-based positioning system.
“There is no other technology that can do this, and it’s delivered in the complete absence of GPS,” continued Gambale. “What is being demonstrated at White Sands is that Locata supplies precisely the same function as GPS, even when there is no GPS available. That’s exactly what you need if the satellites fail.
“If this event had been a GPS failure instead of a GLONASS failure – and it could very easily have been – then the entire world would have plunged into a catastrophe. This event is the navigation equivalent of a ‘close call moment,’ and from here on out no one can even question that this is a really serious problem that must be addressed. Another industry expert recently told me, ‘If there was a sustained GPS outage, it would cause a global financial nuclear winter from which it would take us decades to recover.’”
Gambale concluded, “We need action to develop local backups like Locata around places like airports and other strategically important areas – now! We must not wait until we are faced with another seemingly impossible event like a complete satellite constellation failure. We may not dodge this bullet a second time.”
Locata terrestrial positioning technologies complement GPS by setting up ground-based transmitters, called LocataLites, to create a local constellation called a LocataNet. Once properly deployed, Locata’s unique nanosecond-accurate TimeLoc system synchronizes the network, which allows it to replicate the positioning capabilities of GPS, locally. LocataNets operate today in environments ranging from small warehouses to open-cut mines, wide-area aircraft approach-and-landing systems, and wider areas for aircraft and unmanned aerial vehicle (UAV) uses.
Galileo Growth, Constellation Updates, and Jamming
I used to spend quite a lot of time in Munich working on a multi-national, multi-role fighter aircraft program, so returning for this year’s Munich Satellite Navigation Summit stirred some good memories for me.
Held in the opulent Residenz Muenchen March 25-27, the conference always has a special atmosphere that these historic 1385 surroundings convey to the attendees. The former royal palace of Bavarian monarchs, the whole complex has ten courtyards and 130 rooms. The summit was held in the Max-Joseph Hall, which took a little bit of work to find at first, wandering around the huge complex. One wing of the building hosts a theater, and the mainhall is the primary concert venue for the Bavarian Radio Symphony Orchestra. Overall, this is a delightful setting.
Munich is in the Southern German state of Bavaria, and Bavaria has taken a real interest in the promotion and success of Galileo; witness the extensive Bavarian booth at recent European and North American GNSS conferences. Germany has, of course, been one of the principle nations providing significant funding for Galileo from its inception.
Ilse Aigner
So with this backdrop, the summit brings together people involved with GNSS from around the world to report on the current status of GNSS and to relate how their participation in satellite navigation has progressed. And, of course, Europe, Germany, Bavaria and the European GNSS industry, which is now recognized around the world, all take the opportunity to present their capabilities and successes.
The plenary session on the first evening covered GNSS, Earth Observation (EO) and Telecommunications — with the panel headed by Ilse Aigner, Bavarian State Minister of Economic Affairs and Media, Energy and Technology — an extensive mandate, even for a state-certified engineer who used to work for Eurocopter.
Dr. Merith Niehuss, speaking at the opening of the summit. (copyright: Munich Satellite Navigation Summit).
The host of the summit is actually the University of the German Army in Munich, and we received a warm welcome from two leading professors: Dr. Bernd Eissfeller and Dr. Merith Niehuss, the president. The theme of the summit was to move from implementation to utilization, and in typical European form, all parties were looking to shower potential users with funded solutions to problems of which users are not yet aware — so users clearly need government-provided education, pilot projects and funding. Not exactly a North American concept, where we tend to encourage users to buy our innovative stuff by demonstrating how it can save them money or earn them more revenue.
The European Commission, ESA, DLR, European GNSS Agency (GSA), Airbus, OHB, and Telespazio were also represented. The minister did indeed associate with and praise the local area, claimed 1,000 jobs created related to Galileo through an incubation center at Oberpfaffenhofen, and declared Bavarian support for satellite navigation.
Other important things mentioned by the panel at the plenary included an €11B budget for Galileo/EGNOS and Copernicus (EO project) under the Horizon 2020 program, and an intent to declare Early Service for Galileo before the end of this year with two or three dual Galileo satellite launches — the first two FOC (production) SVs should go to the European launch center in Kourou in April in preparation for launch around June. I heard in a corridor that launches may be planned for June, October and December, but an EU spokesman later said that there would only be two launches this year. OHB now has the contract to build 22 FOC Galileo SVs, each with a design life of 14 years, and they are bullish on their ability to deliver on time and budget.
The program continued the following day with constellation updates from GPS, Galileo, Beidou and the UN International Committee on GNSS (ICG) — GLONASS delegates were notably absent. There was much speculation that they declined to attend due to the Crimean situation, and one U.S. delegate even inferred that they were “uninvited.”
Constellation Updates
GPS: It’s estimated that there are ~2B GPS receivers in use, and there may be ~10B by 2020. A return on investment (ROI) analysis is currently underway, but a rough guess is that costs are in the tens of billions, while annual returns are of the order of $60-100B/year. Another IIF satellite (SV) launched last month, bringing the total to five SVs transmitting L1, L2C and L5, with seven more to come, and multiple launches are expected this year. There are 30 operational SVs on orbit, signal performance significantly exceeds the specs, and consistent, dependable performance has been provided for more than 20 years.
Galileo: First fix was achieved March 12, 2013, with four SVs, two (maybe three?) launches of two SVs each planned for 2014, and early operational capability to be declared by end of this year. €7B in funding is provisioned for 2014-2020, with 16-24 operational ground stations, Commercial Service (CS) planned by 2016 (more on this later), and a long-term evolution plan being worked up during this year.
BeiDou: Fourteen SVs are on orbit — five GEO, four MEO and five Inclined Geosynchronous Orbit (IGOS) satellites, providing dual-frequency services. Thirty total SVs are planned, and the intent is to provide open, compatible, interoperable signals with other GNSS free of charge. There was not much other news to report, other than that China intends to invest significantly in BeiDou to keep improving services.
United Nations ICG: Nine nations and European Union = International Committee on GNSS (ICG), with 20 other associate and observer States. Activities include GNSS compatibility/interoperability, GNSS enhancements, information sharing, and reference frames, timing and applications — lots of upcoming meetings and activities.
Regional and Augmentation Updates
WAAS: Phase IV is underway with GEO replenishment begun, introduction of L5 to replace L2, and replacement of obsolete component parts. One hundred GIII receivers were ordered with L1/L2C and L5 capability for delivery by September this year — and have capacity to also add Galileo. GIII receivers have already been fielded in six locations as part of initial integration testing. The Safety computer will also be upgraded starting this year. 3,912 LP/LPV approaches have been approved, of which 3,379 LPVs serve 1,667 airports. GBAS CAT I is progressing with four U.S. airport installations. System design approval began in January this year, and United Airlines has begun equipping over 90 B737/B787 for GPS approach and landing. Alternative Positioning, Navigation and Timing (APNT) investigations are underway (as a backup to GPS) with a hybrid DME-pseudolite configuration currently favored. Stanford University subsequently presented this and other concepts.
EGNOS: A €1.58B budget has been approved, and EGNOS V3 evolution is underway, with L1/L5 and GEO (SES 5 and Astra 5B) replenishment, a requirement to expand East and West and to the North to provide full coverage to all EU States.
About 100 EGNOS LPV approaches are approved — this year, it’s hoped to add 150 more.
QZSS: The operational concept has been proven with the first IGOS SV (Michibiki), so Japan is moving forward quickly to add another three SVs (3xIGOS and 1xGEO) and ultimately would like to have a total of seven SVs in orbit providing QZSS services. L1/L1C/L2C/L5 signals are identical to GPS, and L1s/L5s are augmentation signals, while L6 is proposed to be similar to Galileo E6, providing centimeter-level PPP-type service. QZSS essentially is intended to provide higher elevation satellites to improve urban navigation in dense cities.
IRNSS: Coverage extends 1500 km beyond India. The target is <20-meter accuracy, and signals are in L5 and S band and can be used independently or in dual-frequency combinations. A second IRNSS-1B GEO satellite is scheduled to launch on April 4.
GAGAN: The Indian SBAS was commissioned and certified in February this year with a number of ground stations, redundant uplinks and two on-orbit GSAT 8 and 10 GEOs. Gagan is now qualified to provide RNP0.1 (navigation accuracy to 0.1 miles).
QZSS and Japan’s Space Policy
This session provided some detail on how changes in Japan’s Basic Space Law has lead to efforts to expand the use of space and derive further economic benefits that this provides.
Munich Highlights
A collection of examples of Bavarian GNSS innovations followed in a very interesting session led off by an overview of Business Incubation Centers and their collaboration with government agencies and research centers. Small business start-ups are apparently encouraged to apply during four annual time-slots, and receive two years’ incubation support and cash incentives. This has lead to 81 new ventures and has apparently been the source of the 1,000 new jobs mentioned by the Minister of Economic Affairs. The annual European Satellite Navigation Competition and Galileo Masters competition have also generated a whole bunch of ideas and concepts (8,000), some of which have found support through this incubation process.
Airbus Defence gave a short overview of the testing work it accomplished in supporting the first Galileo fix and has prepared several vehicle test platforms, ready to take the next phase of Galileo testing to the streets in realistic, real-world environments.
DLR provided insights into a number of its activities, namely:
Iono mapping
Signal distortion
Multipath
Jammer mitigation – adaptive antenna and processing
GNSS repeaters – how they can become unintentional jammers
Spoofer and Multipath inbvestigations
Antenna designs
GNSS evolution – Maser and clock combination benefits
Army University of Munich discussed radio science experiments in the Solar System and experiments using Mars Express (above) in polar orbit around Mars and resulting measurements of the moon Phobos. Internal and external outreach efforts with numerous organizations were also mentioned.
IFEN provided more down-to-Earth information on the on-going activities at the GATE ground-based pseudolite range, which has enabled realistic outdoors testing of Galileo receivers, well in advance of signals from orbiting satellites. Recent testing has now been able to include the four operating Galileo SVs on orbit with GATE pseudolite signals. GATE will continue to evolve over the next few years to keep up as more Galileo orbital signals come on-line.
Fraunhofer presented information on its 40-channel GPS/Galileo/GLONASS chip-receiver (above) – claiming 1-meter accuracy, low-cost, robust reliable position solution, small form-factor and low-power. Following PRS test-bed development efforts, Fraunhofer has now received a contract to also deliver 20 pre-operational Galileo PRS receivers for use in initial pilot projects.
GNSS Interference
Vidal Ashkenazi, in his inimitable form, lead a panel discussion on interference, jamming (in particular Personal Privacy Devices, or PPD) and spoofing, and coaxed his panel members to provide a whole bunch of information on what’s being done, mitigation capabilities and potential enforcement. Unlike all the other sessions, Vidal’s panel members didn’t use presentations, but rather responded to wide-ranging questions on the subject from the session chair.
David Turner, representing the U.S. State Department, indicated that the ICG will meet shortly in Geneva hosted by the International Telecommunication Union (ITU) to focus on interference, jamming and mitigation. The recourse that nations have for use of PPDs by their people is the law — jammers are illegal, sale and purchase of them is illegal — however, Internet sales are very difficult to police. So detection and mitigation are required to find and shut them down. Dave’s presentation on the GPS.gov website indicates that the ICG is working on an education program for states to inform about GNSS sensitivity to interference and the threat to critical infrastructure if they are allowed to operate. The ICG also has a task force on detection, reporting and systems development.
ISRO indicated that PPD jammers in India are restricted, but permitted for gatherings such as at churches where personal safety may be an issue. Ground-based detection is needed, as well as stronger legal protection that may well prohibit use of PPDs altogether.
Japan Aerospace Exploration Agency (JAXA) indicated that it is working on “signal proofing” for QZSS.
BeiDou said it is building a monitor network in China that will detect jamming.
There was a general discussion on whether receiver manufacturers should be mandated to make receivers that are resilient to jamming – many thought that there have already been significant advances in that direction by manufacturers. The normal approach would be to develop requirements with industry, agency and user inputs, publish them, and call up the requirements in equipment specifications. In the U.S., the Department of Homeland Security is seeking an approach to detection and location.
Legal Impacts of Personal Privacy Devices (PPDs)
While the audience may have had high hopes that the legal eagles could come up with some magic prevention and prosecution solution, the next session was more of a legal background briefing without any concrete conclusions (quite similar to other discussions I’ve had with some lawyers in the past, actually).
The first briefing was from the European Commission/European Union, who indicated that the EU doesn’t own the frequency rights to Galileo (Oh Oh…). They have to operate through a member state, which gets the rights through the International Telecommunication Union (ITU) and then licenses use to the EU — the bottom line being that EU enforcement of jamming protection laws maybe be difficult, as the legal framework only exists at the national level for each state. The EU is trying to get recognition under another class of ITU membership.
EU regulations were presented that state that GNSS re-transmitters can only be operated legally by governments or government contractors. Or can be used indoors for indoor navigation, but only for emergency services at fixed sites which are pre-approved. Pseudolites can only be operated indoors, and there should be no interference to other systems. Jammers are forbidden and cannot be placed on the market for sale.
Eurocontrol had a lot to say about the impact on aviation navigation infrastructure and receivers on aircraft. Existing ground nav aids have limitations, the worldwide equipment infrastructure is becoming quite old — aviation has generally moved away to GNSS and inertial based navigation and uses ground navaids as backup. There is a conflict between regulating GNSS heavily for aviation and how people want to use it in the commercial world. We may have to consider a trade-off between heavily restricted GNSS operations, and wide open commercial GNSS applications.
David Sobel, from Electronic Frontier Foundation in the U.S., presented the contrary case for individual privacy. His argument is that sale of tracking devices is unregulated and can readily be purchased, so people may presumably use them to track others, thereby infringing their privacy. So why shouldn’t people be able to “defend their privacy” by use of PPDs?
Say an employer insists that a vehicle you are driving have a tracking device so he knows where you are. Isn’t the driver also justified in trying to protect his privacy? Since the police in the U.S. can no longer place tracking equipment on suspect vehicles without a warrant, tracking appears to be down to private individuals or companies, who it would appear, have the legal ability to attach tracking devices under most circumstances. So the argument goes that if people have a legitimate concern about privacy, there should be acceptable provisions to allow them to disrupt tracking.
If there is a service such as road tolling, there is an incentive for people to avoid these costs. So systems should be robust enough to avoid disruption. Enforcement is a problem — should police chase people they suspect have jammers, or should they rather chase criminals or help and protect citizens? Mitigation systems need testing, so to test these systems there has to be jamming transmission — which needs to be controlled and regulated. Restricting the import of bad devices into a country might be desired, but the manufacturing countries don’t tend to want to restrict exports as exports help their economy. Again, the argument seems to be that of personal privacy over potential risks and damages to society.
No solutions, but a healthy discussion of views from a legal perspective.
Precise Point Positioning (PPP)
The group discussing PPP options consisted of the GSA (charged with exploitation of Galileo services), several principle industry service providers of PPP, and the federal agency, which provides PPP-like services in Germany.
The GSA presented its ideas concerning the provision of high-accuracy PPP corrections over the Galileo E6 signal – the so-called Commercial Service (CS). The intent, however, would not be to disrupt the commercial marketplace. Nevertheless, GSA is proposing a public-funded service to be sold to users within a market that is already well served by commercial worldwide service providers who charge users for cm-level PPP service.
And while Trimble made a polite presentation on the many levels of capabilities of its TerraSat services, as did Veripos and to some extent Fugro, it was clear that the commercial providers are not eager to find competition in their market from a government entity. NovAtel also chimed in on this conflict as it will be involved in Veripos/TerraStar, following its acquisition by Hexagon. Fugro appeared to be interested in acquiring rights to distribute CS on behalf of GSA.
The German Federal agency promoted open data, source and standards from the IGS network to which it contributes: IGS is supported by numerous national agencies around the world. Orbit and clock PPP service is available 24/7 from multiple sources. However, the service is offered on a best efforts basis without a service guarantee, and cannot achieve the accuracies or convergence times of commercial services.
I talked subsequently with Michael Ritter, CEO of NovAtel, to learn the background to the Veripos/TerraStar acquisition. It’s clear that providing PPP services means added value to NovAtel when they sell receivers with PPP capability, so they will quickly discontinue offering Omnistar subscriptions and will shortly launch NovAtel Correct, offering Veripos (marine) and TerraStar (land) PPP subscription services. NovAtel is making significant inroads in the agriculture segment, and they see PPP service as an essential element of this and other businesses. The acquisition was worth something on the order of $200 million, so there is a vested interest in making these services pay and discouraging GSA entry into this market. Veripos will continue supplying other GNSS OEM receiver manufacturers — notably Septentrio, who use TerraStar services, now also NovAtel, and potentially another major GNSS manufacturer.
Future of GNSS in User Segment
Chaired by Greg Turetzky of Intel, this session opened the third day of the Summit. The presenters offered their concepts for current and future GNSS equipment and systems.
Stanford University outlined its work with FAA on an alternate PNT system to be used as a back-up to GNSS. It used to be that GNSS systems were designed to overcome space-weather effects and faults in equipment design or manufacture — nowadays, there are “bad guys” out there and we need to “protect, toughen and augment” these systems. Antennas can be built that impart a specific signature to the signals they transmit, and this may aid in finding and prosecuting the bad guys, but the main focus of work is development of a hybrid system using Distance Measuring Equipment (DME) and a pseudolite.
Tests have demonstrated good performance, and these prototype efforts could lead to aviation requirements (MOPS) development by 2018 and deployment by 2020.
Septentrio has been involved in Galileo since it began and was the first company with Galileo receivers. Nowadays, they have receivers fielded in multiple commercial applications, including machine control, maritime, aviation, automation, and measurement, delivering accuracies from a meter down to a centimeter. They will add E6 to their AsteRx family of multiple-channel, multi-frequency, multi-constellation receivers, and have developed a number of hardware and software mitigation techniques to combat jamming, interference and multipath, and to integrate receivers with inertial units for aiding.
Furuno is interested in resilient PNT for marine applications, and has examined the use of eLoran as an alternative to GPS, but has moved towards a system of radar beacons that detect radar pulses from passing ships and transmit their positions, enabling position determination. In tests, accuracies of around 2 meters have been obtained with two beacons.
Quascom’s approach is to add firewalls inside receivers, which toughen the processing and prevent distortion of position information. Quascom believes this will be necessary until authentication can be added into the GNSS system itself, so that any data received is validated and is known to be good.
Chris Rizos from the University of New South Wales, Australia, drew attention to the “holes” that exist in GNSS, and reviewed a number of possible “Band-Aid” fixes, such as Wi-Fi especially for indoor location. However, his solution seems to be to establish terrestrial networks transmitting GNSS-like signals.
Eurocontrol indicated that aircraft currently use inertial and DME extensively as a back-up to GNSS navigation. By 2030, there will be multiple constellations, and dual-frequency use should become commonplace in aviation, so GNSS navigation should be much more robust. Aircraft approaches are required to be in conformance with Required Navigation Performance (RNP), so would it be possible to develop RNP procedures for DME and inertial to be used as back-up during approaches in the event GNSS is disrupted?
To conclude the session, Airbus provided a “starter course” overview on inertial systems – how they work, the range of different types available, what they can achieve, costs, strengths and weaknesses and integration with GNSS.
The summit continued with subsequent sessions on:
Space technologies and users
GNSS monitoring of Earth and disaster management
Copernicus – Earth Observation
GNSS Education
Unfortunately, my deadline didn’t allow me to attend these equally interesting presentations.
There is also a manufacturers’ exhibit area at the summit that just fits into a couple of corridors near the main hall – around 20 booths. I talked with several of the manufacturers, including Spirent who has launched its latest GSS9000 multi-frequency-constellation simulator, with a four-fold increase in system iteration rate over the previous model. Exhibitors appeared to be pleased to be at the summit and by the level of interest shown by the attendees.
So, as this year’s Munich Summit concludes, where does this leave us? We’ve learned some new things about several GNSS topics and heard some interesting new concepts. Europe appears to be now focused on users and applications, to ensure there is market growth and use of Galileo. What stands out for me is the contrast between how European governments go about GNSS and how North America and the commercial world does the same thing without as much direct influence. This is nothing new, of course, it’s just the European way…
Nucleus of Four Now Operational: It “Works, and Works Well”
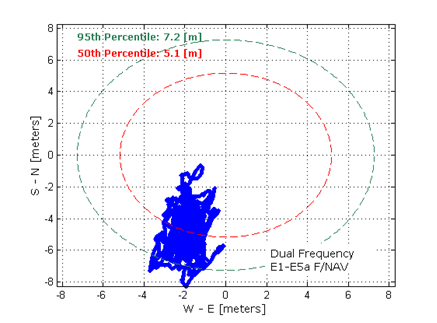
Dual-frequency Galileo positioning performance during the In-Orbit Validation phase: positioning accuracy is an average 8 m horizontal and 9 m vertical (95% of the time). Its average timing accuracy is 10 nanoseconds on average. Plot courtesy of ESA.
“IOV was required to demonstrate that the future performance that we want to meet when the system is deployed is effectively reachable,” said Sylvain Loddo, ESA’s Galileo Ground Segment manager. “It was an intermediate step with a reduced part of the system to effectively give evidence that we are on track.”
Following a March 2013 first determination of a ground location, jointly by Galileo’s space and ground segments, program managers undertook a wide variety of tests all across Europe.
“More than 10,000 kilometers were driven by test vehicles in the process of picking up signals, along with pedestrian and fixed receiver testing. Many terabytes of IOV data were gathered in all,” said Marco Falcone, ESA’s Galileo System manager.
According to ESA’s elaboration on the test results, the system has proved itself capable of solely performing positioning fixes across the planet.
Galileo’s observed dual-frequency positioning accuracy is an average of 8 meters horizontal and 9 meters vertical, 95 percent of the time. Its average timing accuracy is 10 billionths of a second. Its performance is expected to improve as more satellites are launched and ground stations come on line.
For Galileo’s search-and-rescue function — operating as part of the existing international Cospas–Sarsat programme — 77 percent of simulated distress locations can be pinpointed within 2 kilometers, and 95 percent within 5 kilometers. All alerts are detected and forwarded to the Mission Control Centre within a minute and a half, compared to a design requirement of 10 minutes.
“Europe has proven with IOV that in terms of performance we are at a par with the best international systems of navigation in the world,” said Didier Faivre, ESA director of Galileo and Navigation-related Activities.
Historically Speaking. In a February 2013 GPS World article, Peter Steigenberger, Urs Hugentobler, and Oliver Montenbruck discussed Galileo-only positioning. “Using an ionosphere-free dual-frequency linear combination of pseudorange measurements on the Galileo E1 and E5a frequencies, the position of the TUME reference station [at the Technische Universität München (TUM) in Munich, Germany] could be determined with a 3D position error of less than 1.5 meters,’” the authors said.
Crystal Ball Gazing. The next two Galileo satellites, of the full operational capability (FOC) class, currently complete their testing for flight clearance at ESA’s ESTEC facility.
Six such satellites are destined to rise into space in 2014, according to ESA’s master plan. Should all those launches occur as scheduled, Galileo’s initial services could start by the end of the year.
GNSS Vulnerable: What to Do?
Too Much Sensitivity, Not Enough Robustness, Says Parkinson
Brad Parkinson, the founding architect of GPS, told a UK conference that the system needs to be made more robust to ensure worldwide availability of services to users. His concerns over GPS availability relate to threats such as the loss of authorized frequency spectrum (implicitly creating licensed jammers), space weather due to hyperactive ionospheric conditions, and deliberate or inadvertent jamming of GPS signals.
He warned that GPS is more vulnerable to sabotage or disruption than ever before, and charged that politicians and security chiefs are ignoring the risk. Western governments are “in their infancy in recognizing the problem,” he remarked further in an interview with London’s Financial Times. “[In the United States] I don’t know anyone that is really in charge of it. The Department of Homeland Security should be [but] … they don’t have any people that understand it very well. They’ve got one person without any budget to speak of.”
He also warned that Europe’s €5 billion Galileo system is equally at risk.
Parkinson proposed a three-stage program to:
Protect (legally) the signal and physically eliminate jamming sources;
Toughen the GPS/Galileo receiver’s resistance to interference;
Augment the GPS signals with other satellites or with ground-based transmitters such as eLoran.
To support his proposal, Parkinson stated, “The number one need for all GPS or Galileo users is availability. Over the years, manufacturers of signal receiver technologies have focused too much on sensitivity and not enough on resilience or robustness. The maritime industry is a particular concern where users have taken GPS for granted. They must increase preparedness and backups as they do in aviation or other GNSS-using industries.
“Even today, most ships have only GPS and the vision of their crew to guide them when approaching harbors. As you can see from today’s conference, there are a wealth of solutions to toughen and back up GPS, many of which are not technologically difficult nor expensive, but still their adoption in sectors such as global shipping is certainly not adequate.”
As part of his protection program, Parkinson urged that penalties for jamming GPS networks be coordinated worldwide. “In Australia, if you cause interference likely to cause prejudice to the safe conduct of a vessel, it’s five years in the jug [jail] and $850,000.” Contrasting this with a U.S. case that may simply impose a forfeiture of the culprit’s jamming device, Parkinson added, “I’m calling for the community of nations to move to the Aussie-type penalties.”
In the toughening regard, Parkinson alluded to integration of GPS data with information derived from an inertial positioning system. “If you combine all of these things, a good set should be able to fly within 1 kilometer of a jammer with a 10-kilometer range,” said Parkinson. “That’s what I call toughening.”
Parkinson made his remarks as the keynote speech at GNSS Vulnerabilities and Resilient PNT 2014, hosted by the Royal Institute of Navigation. He will also deliver the keynote address, “Assured PNT: Assured World Economic Benefits,” for the European Navigation Conference on April 15 in The Netherlands.
Russia will deploy as many as seven ground monitoring and augmentation stations for GLONASS outside its national boundaries. GLONASS/GNSS Forum Association Executive Director Vladimir Klimov stated that “It is planned to deploy about six or seven stations on foreign territories this year.” Negotiations for the stations are now taking place with foreign nations.
Currently, there are 46 GLONASS ground stations on Russian territory, eight in neighboring countries, three in Antarctica, and one in Brazil. The United States recently spurned, with some Congressional trumpeting, a Russian tender to site one of the ground stations on U.S. soil.
New Instrument in Space. In mid-February, the most recent GLONASS-M satellite traveled to the Plesetsk cosmodrome for a probable mid-March launch. GLONASS-M 54 will carry a high-accuracy thermal stabilization unit, installed on the spacecraft for testing and flight qualification. The next-generation K-class of GLONASS spacecraft will loft this device to provide increased positioning accuracy.
Five GLONASS-M craft are planned for launch in 2014, in one triple and two single launches.
ITT Exelis is offering the Signal Sentry 1000, a proprietary product that detects, geolocates, and characterizes sources of intentional and unintentional interference to the U.S. GPS signals, and provides actionable intelligence to the user.
The system leverages GNSS signal domain knowledge, and is based upon patented technology developed through the company’s history of designing and fielding electronic intelligence systems, ITT Exelis said.
Leveraging Exelis GNSS signal domain knowledge, the system is implemented using commercially available GPS receiver and computer server/data technology. Actionable intelligence is available in the form of pin mapping of interference sources in addition to longitude/latitude/altitude data, all available through a web-enabled graphical user interface.
Signal Sentry 1000 can assist efforts to ensure GPS spectrum integrity and aid in law enforcement operations that require GPS availability. Benefits for users include:
Instantaneous identification and geolocation of jamming sources, improving situational awareness.
Threat Development Parallels Information/Communication Technology
Headshot: Oscar Pozzobon
By Oscar Pozzobon
The GNSS interference session this year at the ION-GNSS conference in Nashville was one of the most crowded, confirming the need of all sectors of the community to understand the threats in GNSS and how they can be mitigated. In that context I received one of the most challenging questions of my career: “Can we predict the future of GNSS security?” What is the status of civil and commercial GNSS security today? Which are the threats and risks and how they are mitigated? Where are we going and what shall we expect from the future?
I decided to tackle this topic carefully, using as a basis and inspiration the history of information and communication technology (ICT) security: from the first threats and attacks of the 1980s to a glance at what technology offers today.
Secondly, to obtain different perspectives — and shift the blame to someone else if one day these predictions should prove to be wrong — I solicited the opinions of three other experts and colleagues in the domain of GNSS and security: Logan Scott, Todd Humphreys, and David Last.
Snapshots from History
The Internet was officially born in 1969 when the U.S. Defense Advanced Research Projects Agency (DARPA) crated the Advanced Research Projects Agency Network (ARPANET). A short 11 years later, the 414 Gang, a computer-hacking organization (the term hacking was coined at the Massachusetts Institute of Technology as early as the 1960s) performed one of the first attacks and frauds upon computer systems. In 1983 the first computer virus was discovered. In 1988 the Computer Emergency Response Team (CERT) was created to report and disseminate information on the threats, and AT&T Bell Labs created the first concept of firewalls. Some readers may recall the 1983 movie War Games, which found Hollywood hard at work on cyber-attacks, denial, and deception to computer systems at a time when we had only six GPS satellites in orbit. One year later, Steven M. Bellovin published a paper on the possibility of performing a transmission control protocol/internet protocol (TCP/IP) Spoofing attack.
Six years after that paper, in 1995, the Computer Incident Advisory Committee (CIAC) reported the first TCP/IP spoofing attack to a system. In another four years, the first denial of service (DoS) attack to computer networks was reported by the CERT. A DoS attack consists of several computer systems sending unsolicited requests to the target, causing a saturation of network and computer resources. In terms of objectives, it could be compared to what jamming causes in GNSS systems.
Between 1984 and 1986, Dorothy Denning and Peter Neumann researched and developed the first model of a real-time intrusion detection system (IDS). This prototype was initially a rule-based expert system trained to detect known malicious activity. I like to think that this could be compared to today’s jamming detection and localization systems.
In the 1990s, the need for guidelines to provide general outlines as well as specific techniques for implementing security became a pressing one for all organizations. The first standard, originally published by the British Standards Institution (BSI) in 1995 was the BS 7799, was later adopted by the International Organization for Standardization (ISO) as the ISO/International Electrotechnical Commission (IEC) 27000 series.
Information technology today can be security-evaluated via the Common Criteria (CC) standard (ISO/IEC 15408), which allows computer-systems certification. CC is a framework in which computer system users can specify their security functional and assurance requirements. The Federal Information Processing Standard (FIPS) 140 is an alternative standard for cryptographic modules, developed by the U.S. Federal Information Processing Standards.
The Nessus Project, started by Renaud Deraison in 1998, set as its objective the provision of an open-source vulnerability-assessment tool. Since 2000, Nessus has become one of most popular tools for computer-network security and vulnerability assessment, used by more than 75,000 organizations worldwide.
ICT security today is assured in a lifecycle composed by CERT managing the threats notifications, ISO/IEC 27000 managing the processes, and CC/FIPS 140 defining the security requirements for the system and vulnerability assessment tools to certify the robustness.
Now, Where Are We in GNSS?
Radio-frequency interferences (RFI) or jamming cases can hardly be tracked, as they are difficult to detect and have a long history in the military domain. Recent incidents such the one at Newark International Airport show that the threat is increasing and demonstrate the need for mitigation strategies. GNSS signal falsification frauds, or spoofing, seems to as yet have no evident cases in the civil domain.
The Volpe Report of September 10, 2001 is one of the first government public announcements of GNSS threats, including jamming and spoofing. More than 10 years, later the unmanned aerial vehicle (UAV) experiment coordinated by Todd Humphreys at the University of Texas proved that such attacks are feasible.
In GNSS, jamming detection (and sometime mitigation) are nowadays commercial options for some professional and mass-market GNSS receivers. Spoofing detection has been available in commercial prototype receivers since 2008 (among others, the Trusted GNSS Receiver (TIGER) funded by the European GNSS Agency. In 2012 we have seen the presentation of the first civil GNSS security testbed. For examples of the latter, see the University of Texas TEXBAT initiative, mentioned on page 37, and the GNSS Authentication and User Protection System Simulator (GAUPSS) project, which involved the development of software and algorithms that were integrated and tested in the radio navigation laboratory of the European Space Agency/ European Space Research and Technology Centre (ESA/ESTEC) in Noordwijk, the Netherlands.
I will make the assertion that compared to ICT security, civil GNSS security seems to be reliving the early days of the 1980s: first publication of attack concepts, first publicly known attacks, no standards, and only prototype mitigation strategies. With a gap of almost 30 years, at least four mid-Earth orbit GNSS systems becoming operational in the next few years, and an annual 10 percent growth rate of GNSS applications, the era of civil GNSS security begins now.
The Question Why
Logan Scott is a consultant specializing in radio-frequency signal processing and waveform design for communications, navigation, radar, and emitter location. His opinion on the future threat leaves no doubts:
“In assessing security threats, an important starting question is ‘Why would someone do that?’ If there is no motivation, chances are, there won’t be an attack. Over the last five years or so, the combination of ubiquitous, low-cost communications systems and satellite navigation has moved civil GNSS positioning and timing into use domains where there are stronger motivations for an attack. Specifically, widespread use in asset monitoring and tracking encourages jamming attacks and so, we are seeing more such attack. As GNSS becomes more deeply embedded into societal infrastructure, we can expect to see more attacks of increasing sophistication. Motivation will be there.”
David Last is a consultant engineer and expert witness specializing in radio-navigation and communications systems. He operates in the domain of covert tracking and law enforcement,, an area where interference can be tempting. As expert in the field, and to the best of his knowledge, he believes that “although there are some cases of jamming, we have seen no events of spoofing — so far. To date, all we have seen from criminals are crude jamming attacks. Attacks by technically sophisticated aggressors who understand GNSS vulnerability have yet to start. They will be much more serious.
“Furthermore, when the receiver stops receiving data in a court case, we can’t say it’s jamming: we can mention that is one of the things that stops the signal. Law enforcement is now beginning to use receivers that can perform jamming detection.”
David Last’s opinion on the issue of potential low-cost spoofers appearing in the near future was also provocative: “Criminals don’t buy things, they steal them.”
The Time is Right, Now
An ICT security standard arrived about 10 years after the first publication and case reports of attacks. Are we at the right time, now, to consider security certification of GNSS receivers?
Logan Scott’s opinion is that receivers should be certified in order to provide awareness of the attacks:
“Today, essentially all houses and buildings have smoke alarms. Smoke alarms don’t put out fires but they do alert the occupants to the probability that there is a problem. Similarly, GNSS receiver situation awareness regarding jamming and spoofing is a first step towards militating against attacks on GNSS components. As civil receivers stand today, many don’t discriminate between loss of lock due to signal attenuation and loss of lock due to jamming. This needs to change.
“Fairly simple algorithms can detect most types of jamming and spoofing. Jammers and simple spoofers almost invariably affect automatic gain control gain settings. They are easy to detect. More sophisticated spoofers have difficulty covering apparent direction of arrival and can be detected using some simple antenna techniques.
“The problem for the user community at large is in knowing whether or not a receiver maintains adequate situational awareness. This is where test-based receiver certification can play a role.”
Awareness is indeed needed to notify to the application the security and authentication state. GNSS authentication integrated in the system still lies far off.
Not only is implementing authentication without compromising user cost and simplicity challenging, but the impact on the ground and space segment in GNSS to maintain legacy signals compatibility is also considerable.
We believe that user-based authentication will be the Plan B for the next 5–10 years. This requires the development of receiver techniques and the use of security testbeds as the baseline for vulnerability assessment, in the same way the Nessus tool was used in the 1990s for computer network assessment.
On the test approach, Logan Scott stresses that “Using a series of canned scenarios, GNSS receivers can be tested to determine how well they maintain situational awareness. Do well enough, and the receiver can be stamped as certified, much like an Underwriters Laboratory (UL) label. The test process can be automated and conducted by an independent third party, similar to the way cellular equipment is certified.
“Additional certifications might include cyber security aspects such as accepting only digitally-signed software updates and maps, providing attestation capabilities, and use of authenticatable GNSS signals.
“The benefit for the non-expert user community is that they have a basis for selecting GNSS receivers, secure in the knowledge that they meet minimum performance standards.”
Testing, Testing
Ringing in my third fellow expert, I asked Todd Humphreys, assistant professor in the Department of Aerospace Engineering at the University of Texas at Austin, for his opinion regarding the future of GNSS security testing.
“A testbed capable of simulating realistic spoofing attacks is needed so that the efficacy of proposed civil GPS signal authentication techniques can be experimentally evaluated. A generic testbed capable of evaluating all known authentication techniques would be prohibitively expensive; for example, it would require a large anechoic chamber for evaluating receiver-autonomous antenna-oriented techniques. But if the scope of evaluation is limited to receiver-autonomous signal-processing-oriented techniques and networked techniques, then it is possible not only to develop an inexpensive testbed but to share the testbed’s data component so that the tests can be replicated in laboratories across the globe.
“In October, we released the Texas Spoofing Test Battery (TEXBAT), a set of six high-fidelity digital recordings of live static and dynamic GPS L1 C/A spoofing tests conducted by the Radionavigation Laboratory of the University of Texas at Austin. National Instruments is hosting TEXBAT on cloud servers so that anyone can download it.
“The battery can be considered the data component of an evolving standard meant to define the notion of spoof resistance for civil GPS receivers. According to this standard, successful detection of or imperviousness to all spoofing attacks in TEXBAT, or a future version thereof, could be considered sufficient to certify a civil GPS receiver as spoof-resistant.
“This is a spoofing-specific version of the ‘not stupid’ certification that Logan Scott has suggested for GNSS receivers. In my July congressional testimony, I advocated requiring a ‘spoof resistance’ certification for GNSS devices that are used in critical infrastructure.”
Looking into the Future
Now I turn and attempt to answer the final question: Can we predict the future of civil GNSS security?
I believe that we can predict that, unfortunately, attacks will increase, and new attacks will be discovered. For example, we have been talking about deception jammers (also known as intelligent, PRN, or gold code jammers) only in the last few years, as an emerging threat. We will see certification and standards for security in GNSS, and we expect them to come in the next five years. Tools for GNSS security testing are already available commercially, for example the Qascom GNSS Security testbed (GST). As ICT has CERT for notification of threat, we will also see the raising of a GNSS emergency response team — possibly called a GERT.
In conclusion, whether my predictions turn out to be correct or not, the good news is that GNSS security also has a history in Hollywood’s annals: the 1997 James Bond movie Tomorrow Never Dies narrates a spoofing attack on the GPS navigation system of a submarine, performed via a GPS encoder that modifies the time.
Again, 007 anticipated the future, and he did it 15 years before a handful of world renowned GNSS security experts.
I have not yet seen the 2012 James Bond film Skyfall. I wonder what it portends?
Oscar Pozzobon is the director and co-founder of Qascom S.r.l., based in Bassano del Grappa, Italy. He received a Masters degree in telecommunication engineering from the University of Queensland, Australia, and is the Italian contact for the Civil Global Positioning System Service Interface Committee (CGSIC).
A Proactive Approach for More Efficient Spectrum Use
In my vision of the future of GNSS, I see a pressing need to manage radio-frequency spectrum more efficiently. This will drive the creation of official standards for GNSS receivers, and better design of those receivers with better filters at lower cost, to protect against out-of-band and near-band interference. This in turn will enable user to undertake widespread monitoring and reporting of in-band interference, and create the freedom for many technologies to explore wider and more productive use of all bands of the radio-frequency spectrum.
Spectrum Management
As a consequence of unprecedented technological development on all fronts and in many fields, the radio-frequency spectrum is very congested. All countries, and the United States in particular, must find ways to use this spectrum more efficiently. Licenses for spectrum bands are very expensive, and special interest groups do all they can to secure ownership of any part of the spectrum and to prevent others from competing with them. There is an intense struggle going on, both behind the scenes and in the public arena; it has been called “the spectrum wars.” These involve big companies, very high stakes, politicians, and special interest groups. The Federal Communications Commission (FCC) seems caught, powerless, in the crossfire between these powerhouses.
GNSS Interference
GNSS interference exists everywhere and comes from many different sources, identified and unidentified, intentional or unintentional. The 1-dB effect on GNSS of the proposed LightSquared signal is negligible compared to what already exists. The reason that the LightSquared plan encountered so much opposition was not because of its effect on GNSS. It was because of its effect on the competing business models of large companies and special interest groups.
With the tools that we have created and embedded in our receivers, everyone can easily see that widespread interference already exists in most places, especially in cities, and that interferences can easily be monitored and automatically reported. It seems no organization has ownership of regularly monitoring interferences on these bands and taking corrective actions. This is partly because the tools to easily monitor and report interferences did not exist earlier.
GNSS Receivers
Current GNSS receivers on the market and in use around the world rely on inadequate designs. The technology does in fact exist to overcome out-of-band interference problems such as LightSquared and many others commonly encountered in today’s congested radio-frequency environment. There is no reason to prohibit others from using bands near GNSS; this just makes spectrum use inefficient. Continued shipping of inadequate, inefficient receivers by current manufacturers only increases and compounds the problems encountered by users.
There are standards for manufacturing countless industrial goods — for example, something as ordinary as car tires or — but there is no standard for building GNSS receivers that will be used in critical applications.
So far, the FCC has been silent on this topic, and has not established guidelines for GNSS receivers that are used in critical applications. The civilian users of GNSS, such as the U.S. National Geodetic Survey, the U.S. Geological Survey, the Federal Aviation Administration, and so on, have criteria for all sorts of little equipment, but there is no criteria for GNSS receivers that they claim are so important for their job.
Instead of taking the proactive and productive approach of putting filters into the receivers that they use, these organizations advocate keeping spectrum bands adjacent to GNSS off-limits to other users. Manufacturers do not see any reason to make better receivers while such a powerful lobby protects them.
Interference monitoring and reporting is strongly desirable for places such as GNSS reference stations, or for users to see the interferences before they start a jog that they are tracking on their GPS-enabled personal training device — just as pilots check the weather before they take off.
Special Interest Groups, Politics, and Blind Followers
The problem that LightSquared encountered was that its proposal impacted the business models of special interest groups. Although we — that is, JAVAD GNSS in presentations before the FCC in Washington DC — showed that other interferences exist in cities, the FCC did not care, and GNSS magazine editors did not care. They just blindly followed what the special interest groups had planned for them.
Brad Parkinson, in his article “PNT for the Nation: Three Key Attributes and Nine Druthers” in the October issue of GPS World, did not even hint at guidelines for building GNSS receivers. This is similar to formulating guideline on how to build and clean the roads while having no guidelines on how to build tires that are going to ride on the roads.
In Parkinson’s long list of recommendations, there was no mention at all that we need to build better GNSS receivers and be able to monitor interferences. There are guidelines and standards for how build every little item, but none for GNSS receivers that are claimed to be so essential for our security and prosperity.
Military GPS receivers do not have protection against even one particular type of interference such as that posed by LightSquared — and the suggested approach was to bomb such interferences, which most admit that of course cannot be done. This is a bad attitude. The cost of a filter in a receiver is almost nothing. A precision bomb costs millions if you factor in development costs, and deployment and delivery puts the full cost even higher.
The case is similar for GNSS receivers used in commercial airplanes. Instead of pushing for a better GNSS receiver design, the FAA simply hopes that interference does not happen.
Conclusion
These are my predictions — and my strongest possible recommendations — for the future of GNSS.
The FCC will create standards for GNSS receivers.
GNSS manufacturers will be forced to build better receivers.
GNSS users will benefit from better receivers at a lower cost.
Interference monitoring and reporting will become a desirable feature of GNSS receivers.
Bands near the GNSS spectrum will be freed for more efficient use by all types of productive technology.
I am proud to be a part of the efforts to make these happen, against all odds.
Javad Ashjaee received his Ph.D. in electrical engineering from the University of Iowa. He was chairman of the Computer Engineering Department, Tehran University of Technology, 1976-1981. He began his GPS engineering career at Trimble Navigation, 1981–1986. Founder and president of Ashtech Inc., 1986–1995, the company that produced the first integrated GPS-GLONASS receivers; founder and CEO of Javad Positioning Systems, 1996–2000, which he sold to Topcon Corporation. He founded JAVAD GNSS in 2007, and is currently president and CEO. In 2010, the company introduced the integrated geodetic receiver TRIUMPH-VS, with a GNSS Interference Analyzer, capable of tracking current and next-generation signals of GPS, GLONASS, QZSS, and Galileo signals. In 2011, the company introduced a LightSquared-compatible GNSS receiver.
Many maritime users today believe that GPS will always be available. This is simply not the case.
By Alan Grant, Paul Williams, George Shaw, Michelle De Voy, and Nick Ward, The General Lighthouse Authorities of the United Kingdom and Ireland
GNSS availability can be affected in many ways, through events or conditions that affect constellation health, the signal-in-space, or the reception of that signal. The primary means of positioning, navigation, and timing (PNT) employed in maritime applications, whether stand-alone or augmented, has well known vulnerabilities.
This article considers three specific threats and reports on how they may affect maritime safety: GNSS interference and jamming; constellation availability; and space weather events.
Interference and Jamming
There has been a marked increase in both the use and the availability of GPS jamming equipment in recent years. The implications are that jamming units may find their way onto ferries and around ports or harbors where they will interfere with the many systems utilizing GPS, thus affecting maritime safety.
GPS jamming units are widely available on the Internet, with current models already capable of jamming L1, L2, and L5 signals. While we report here on the jamming of GPS, all GNSS constellations would be affected in a similar manner.
To understand the effects of jamming and GPS service denial on maritime safety, the General Lighthouse Authorities of the United Kingdom and Ireland (GLAs) conducted two jamming trials, in collaboration with the UK Government’s Ministry of Defence (MOD), who provided and operated the GPS jamming units. For the safety of all GPS users, and in line with MOD regulations for the peacetime use of GPS jamming units, notice was given to all national bodies. In addition, the GLAs issued notices to mariners explaining that aids to navigation (AtoNs) using GPS in the vicinity of the trials location would be unreliable during the jamming periods.
Flamborough Head. The first jamming trial was conducted off the East coast of the United Kingdom near Flamborough Head. The aim of this trial was to understand the effect GPS jamming may have on ship-borne and shore-based equipment, GLA AtoNs, and also on the crew.
The Northern Lighthouse Board vessel Pole Star steamed between two known waypoints, through an area affected by the jamming signal. Data was recorded from two typical marine-grade GPS receivers installed on the vessel, along with an eLoran receiver that provided the true position throughout the trial.
The results identified three distinct states (Table 1) corresponding to the manner in which GPS-fed equipment responded to jamming conditions. When the jamming signal was sufficiently strong to prevent reception of GPS signals, a large number of alarms sounded on the bridge almost simultaneously, providing a potentially disconcerting and confusing environment for the mariner. However, the effect that represented the highest risk was the provision of erroneous data from some GPS receivers.
Table 1. Effects observed for the three states identified from Flamborough Head trials.
Figure 1 compares an erroneous position reported by a typical marine-grade GPS receiver with the vessel’s true location. In this figure, the light blue line shows the path taken between the two waypoints.
The colors of the plotted position points indicate vessel speed. The three states described in Table 1 can be seen.
State 1 is observed at either end of the passage where the solid blue line occurs; this is where the jamming signal strength is much lower than the GPS signal strength, and the GPS-fed systems are operating normally.
As the vessel approached the main lobe of the jamming signal, indicated by the red lines, it reached an area where the jamming signal was comparable with the received GPS signals, leading to State 2. During this state, erroneous data can be observed with the receiver reporting the vessel on land traveling at high speed.
As the vessel entered the main lobe of the jamming signal, State 3 was observed: the GPS signals were swamped by the jamming signal, and the receivers failed to provide an output. Then, as the vessel continued the passage out of the jamming area, one can observe the change in states as the ratios of jamming to GPS satellite signals decrease, and GPS is reacquired.
In the worst case, the GPS receiver reported a position some 22 kilometers away from the true location. The GPS receiver nevertheless declared the position valid. This position was made worse by the fact it was reported inland at a speed of more than 100 knots, while the trial vessel steamed steadily at 10 knots. Depending on how the resulting GPS positioning data is used, it could feasibly result in vessels changing course, through the use of an autopilot, and it could also affect the vessel’s reported position to the outside world. This would then not only affect the vessel’s situational awareness but also the situational awareness of vessels in the vicinity.
The errors observed in Figure 1 were also seen on the vessel equipment fed by the onboard GPS receivers. Erroneous positions were observed on the vessel’s electronic chart display and information system (ECDIS), on the automatic identification system (AIS) positions (where loss of position prevents the unit from calculating a range or bearing to nearby vessels, greatly affecting the crew’s situational awareness), and on the vessel’s radar (Figure 2).
The results observed during these trials gave an important example of what can happen to onboard equipment as well as the impact it can have on the mariner during periods of GPS jamming and service denial. It is clear that GPS denial caused by jamming can not only prevent PNT information from being calculated, it can also result in erroneous data being presented to the mariner.
Newcastle. A second series of demonstrations was conducted off Newcastle-upon-Tyne, on the North East coast of England, to communicate the importance of resilient PNT to a selected audience. The audience included a number of key decision-makers from European and UK governments, maritime industry, mariners, and other aids-to-navigation service providers. The demonstrations took place onboard the Trinity House vessel Galatea.
For this trial, the GPS jamming unit was installed onboard the Galatea and configured to jam GPS within a small
area around the vessel. As before, two typical marine-grade GPS receivers were installed along with an eLoran receiver; for this trial, a modified electronic chart display was also installed and altered to enable two position inputs to be displayed at the same time, to compare the reported GPS and eLoran positions in real-time.
Throughout the demonstrations differential Loran (dLoran) corrections were provided using a transportable reference station installed on the shore at South Shields, to mitigate the impact of temporal variations on the eLoran position. Differential-Loran corrections were generated by the reference station and sent to the GLAs’ eLoran transmitter in Cumbria for inclusion in the eLoran Loran Data Channel (LDC) broadcast. The eLoran receiver on the vessel received the broadcast and was able to extract and apply the corrections in order to obtain an eLoran position within 9 meters (95 percent).
One demonstration scenario showed the sudden effect of a strong jamming signal, designed to simulate a jamming unit being brought onto a ferry or other vessel. This took the vessel’s equipment directly to State 3: complete loss of GPS information with a large number of alarms sounding on the bridge. The loss of GPS data prevented the Galatea’s AIS and VHF units, among other systems, from operating correctly.
Before the second scenario was conducted, the jamming unit was stopped, and all of the GPS receivers integrated into the bridge equipment were allowed to reacquire satellites and fully recover. The second scenario was designed to reflect a vessel steaming towards a jamming source. The field strength of the jamming signal was slowly increased until State 2 was observed, with erroneous and often hazardously misleading information reported.
As with the Flamborough trials, erroneous GPS positions reporting unfeasibly high speeds were observed as shown in the OPENING Figure. However, significantly more subtle errors were seen: errors where the vessel’s reported position differed only very slightly from the true location and wandered around slowly. These subtle changes produce believable positions but hazardously misleading information (HMI). While the overall result of GPS jamming on Galatea was consistent with that observed on Pole Star, there were a few marked exceptions.
The effect of GPS jamming can be seen (Figure 3) on the erroneous positions reported by the trial vessel NLB Pole Star (center right) and also on the vessel DutchProgress (top left).
The ECDIS onboard the Pole Star reported erroneous positions and ultimately failed with the complete denial of GPS. However the ECDIS on the Galatea continued to track the vessel’s position due to an additional position feed from the vessel’s gyro, making it more resilient to jamming, but only in the short term until the gyro requires re-calibration. This is carried out with its built-in GPS receiver! In addition, the AIS transceiver on the Pole Star reported the vessel’s position erroneously due to jamming, and this was observed at shore-based traffic monitoring stations.
During the demonstrations on the Galatea, the AIS transceiver did not provide any erroneous position information, as can be seen in Figure 4. These differences show that the impact of GPS jamming will be different for each vessel and depends on the model, installation, and configuration of the onboard systems.
Effect of Jamming on Safe Navigation
To navigate safely, the mariner needs reliable, clear and trusted information about where the ship is and what is going on around it, so that any threat can be located and identified. While consideration is often given to threats such as areas of shallow water, obstacles, or other vessels; consideration is not generally given to the loss of positional information, timing, or situational awareness.
Loss of GPS-derived PNT information at sea results in the loss of the vessel’s ECDIS, AIS, GPS, and DGPS receivers, preventing the mariner from being able to position the ship and others around it through what are nowadays regarded as the normal means. In addition, the systems one would normally expect to be independent from GPS, and as such available for use in GPS-denied conditions, are also affected; namely the vessel’s radar and gyro-compass.
The radar takes a GPS input to provide a “North-up” setting and the gyro-compass uses GPS to stabilize drift error. Under GPS-denial conditions these units also enter an alarm state and should not therefore be used in that condition.
Clearly GPS jamming can significantly affect the safety of mariners. From these trials it can be seen that the extent of the impact varies from vessel to vessel depending on the equipment installed and the configuration selected.
Satellite Constellation. From the users’ perspective, GNSS availability is the percentage of time they can receive usable data from sufficient satellites in order to calculate their position. The reduction in the number of available satellites in the constellation will have a direct impact on the system’s availability.
A report from the U.S. Government Accountability Office (GAO) in 2009 predicted “significant challenges in sustaining and upgrading widely used [GPS] capabilities” due to delays in launching modernized GPS satellites. The GAO reported the probability of maintaining a constellation of at least 24 usable GPS satellites could reduce to 80 percent or less by 2011, and not return to 95 percent probability consistently until 2015. This could lead to reduced satellite numbers causing coverage “windows” where less than four satellites could be observed and as such reduced GPS availability.
A later report by the GAO indicates that the probability of maintaining a constellation of at least 24 operational GPS satellites is now expected to be 95 percent for the foreseeable future. This figure is based on the current launch schedule, and although the U.S. Air Force Space Command (AFSPC) has provided reassurances, the satellite launch program has in recent years experienced delays, and therefore the risk of reduced satellite availability still remains.
Following the 2009 report, the GLAs commissioned a study to investigate the impact a reduced GPS constellation would have on users in their waters. This study was conducted by the GNSS Research and Applications Centre of Excellence (GRACE) and was split into two parts. The first part was to analyze the impact theoretically and found that with a 21-satellite constellation, GPS coverage “windows” (for example, fewer than four satellites) could last for several minutes and cover a large proportion of the UK and Ireland (Figure 5). This can cause reduced GPS availability and therefore increased likelihood of position errors affecting maritime safety.
The second part of the study investigated the effects further through a dynamic simulation, investigating the effects should a vessel be position
ed off the coast of Belfast during one of the coverage windows. For this a marine-grade GPS receiver and a simulator were used to observe the effects. The study found that the number of available satellites fell below four for several minutes and the reported position data from the receiver appeared to freeze for up to 10 minutes.
If a mariner was traveling at a speed of 35 knots when the position input froze, his reported position would be in error by 10 kilometers from an outage lasting 10 minutes. These outages are significant, and mariners need to be informed of such risks to GPS (and GNSS in the future) before they occur, so they are prepared for any disruptions.
Space Weather. Space-weather events are a particular concern to GNSS availability due to their random nature. It is known that GNSS signals are delayed proportionally to the number of free ions as they propagate through the Earth’s atmosphere enroute to the receiver. The amount of ions in the ionosphere, the total electron count (TEC), is dependant on time of day, latitude, and solar activity, among other factors. During high solar activity, the number of ions in the atmosphere is much higher than at any other time. The greater the signal delay, the larger the errors are in the satellite’s pseudo range and hence the position error can be significant.
Variation in electron density along the GNSS signal path causes signal refraction that produces phase scintillation, introducing group delay that may cause large errors in the pseudorange measurement. Diffraction of the signal wave front induces amplitude scintillation — variations in signal amplitude — with strong fades possible, leading to a GNSS receiver losing signal tracking, and at worst the GNSS navigation solution may be lost.
Solar activity is cyclical, peaking at a maximum approximately every 11 years, during which periods GNSS performance can be severely degraded, especially at equatorial, auroral and polar latitudes. The next solar maximum is predicted to occur during 2013.
During quiescent periods of solar activity, ionospheric effects on GNSS can be managed such that the residual errors caused by the ionosphere do not generally pose a problem to maritime navigation performance.
The GLAs’ DGPS corrections significantly reduce common mode errors, including the effects of the ionosphere. However, at the peak of the solar cycle with high levels of sunspot activity, solar storms and flares, the application of ionospheric models and differential corrections may be less effective, and this could increase position errors and introduce an integrity risk to maritime navigation.
Maritime navigation systems and services that rely on GNSS are at greatest risk of disruption from the ionosphere during the period from 2011 to 2015. Even during a quiet solar maximum, the occurrence of individual sun spots could produce significant effects for discrete events. The effects vary with latitude, season, and time of day (the hours soon after sunset being most affected).
Space weather events have the potential to affect GNSS availability, either by affecting the performance of the satellites themselves or by preventing signal reception.
Mitigation. In general, a number of steps can be taken to help reduce the impact of these threats:
Increase awareness of GNSS vulnerabilities.
Detect incidents and warn the mariner when they occur.
Prevent incidents from occurring, where possible, through legislation and enforcement.
Reduce as much as possible the effects of incidents when they occur, through the hardening of GNSS technology.
Have alternative means of PNT, independent of GNSS.
Understanding that these threats exist and knowing what disruption they may cause is the first step to mitigating their effects, but this does not stop them happening. Being able to identify that an event is occurring and that the data being received from the receiver may not be true is an important part of mitigating the effects.
For jamming issues specifically, the use of GPS jamming units is illegal in the UK and Ireland; however, preventing them from being used is very difficult to achieve. Jamming units are small and easily hidden; however, port-side security and vessel security procedures should prevent jamming units from being used in these locations.
It is a different case, however, to prevent a jamming unit from being used at a coastal location or headland due to the remote nature of these areas.
Mitigating the effect of jamming can be achieved in a number of ways: by limiting the effect within the receiver by using anti-jamming techniques, or by hardening GNSS receivers. Ultimately the best mitigating activity is to not rely on GNSS PNT once the integrity of the data has been compromised.
For space weather events or cases of reduced satellite numbers, there is very little action the mariner can take to remedy the problem or stop it happening. The mitigating action here is one of awareness — information forewarning the mariner that such a condition is imminent, for example.
Monitoring and detection networks can assist in providing such notifications and real-time information on GNSS problems. The need for such a network across the UK and Ireland is the subject of a different GLA publication, but the GLAs support the discussion on a body to monitor GNSS performance and to take the lead in the dissemination of key information.
For periods where GNSS availability has been affected by mutual interference, jamming, space weather events or constellation issues, the best mitigating action is to use PNT information from a second source, one with dissimilar failure modes.
Mariners need to be prepared for GNSS failures and have access to PNT information through dissimilar systems. In addition, procedures covering what to do in the case of GNSS unavailability should also be provided and rehearsed. It is with this view that the GLAs firmly promote the use of all available means of navigation.
Conclusions
All three threats to GNSS availability reviewed here could affect maritime safety. The two trials observed presentation to the mariner of erroneous data, some of which could be considered hazardously misleading, along with the degradation of crews’ situational awareness. The main effects observed were:
The presentation of random errors leading to hazardously misleading information that could, depending on installation, cause a vessel to move off course.
The presentation of erroneous and potentially misleading data to other vessels and shore-based infrastructure.
The sheer number of alarms on the bridge of the vessel could be disconcerting and distracting for the mariner.
The loss of GPS-fed systems, which can create an unfamiliar bridge situation and remove safety-critical systems from operation.
A large number of bridge systems are integrated with GPS and enter an alarm state during periods of GPS outage.
The loss of GPS or a lack of integrity in the reported information leads to an unfamiliar situation on the bridge.
The crews of the Pole Star and the Galatea were expecting to lose GPS, were well-trained, and had primed other systems so they could navigate safely. In real life, there would be no advance notice, and the impact on the crew would be more severe.
The impact of low satellite numbers, as predicted in the 2008 GAO report, could produce poor constellation availability and a loss of PNT information for a considerable period of time. This could result in the same outcome as observed in the GPS jamming trials when entering State 3, where many systems on the bridge failed and entered an alarm condition.
Space weather events are difficult to predict both in terms of when they may occur and their severity. Events could affe
ct satellite positions, their operation, and the reception of their signals by the user, and are clearly a threat.
The GLAs strongly support the need for a resilient PNT solution, one that could continue to provide reliable information during such threats for the safety and benefit of all mariners.
Acknowledgment
This article is based on a paper given at the Institute of Navigation’s 2011 International Technical Meeting.
Alan Grant is a principal engineer for the Research and Radionavigation Directorate of the GLAs of the UK and Ireland, technical lead and project manager for all GNSS projects there. He has a Ph.D. from the University of Wales.
Paul Williams is a principal development engineer with the Directorate and currently technical lead of the GLAs’ eLoran Work Programme. He has a Ph.D. in electronic engineering from the University of Wales.
George Shaw is an engineer at the Directorate and holds a master’s degree in mathematics from the University of Cambridge.
Michelle De Voy is a development engineer for the Directorate, with an MSc in oceanography from the University of Southampton and an MSc in satellite positioning from the University of Nottingham.
Nick Ward is research director of the General Lighthouse Authorities of the UK and Ireland, with responsibility for strategy and planning of research and development.
By Jenna R. Tong, Robert J. Watson, and Cathryn N. Mitchell, University of Bath
Using signal-to-noise measurements from a single commercial-grade L1 GPS receiver, it is possible to detect interference or jamming that is above the thermal noise floor and below a power that causes loss of position.
Interference, intentional or unintentional, is an acknowledged vulnerability of GPS systems. Many of the potential sources of interference are unintentional: interference can caused by harmonics of out-of-band signals, electronic noise, or malfunctioning equipment. The effect, however, is the same independent of intent.
The presence of high-power interference which causes continual denial of service is fairly easy to detect, but lower power interference may still degrade performance, for example by causing loss of lock on some satellites, thus increasing position dilution of precision, although the receiver continues to output a position. Short periods of denial of service caused by intermittent high-power interference may not be immediately detected depending on the timing and ability of the system in use to deal with temporary loss of signal.
Therefore, to fully characterize an antenna environment requires a 24/7 system, whether the purpose is to determine whether a location is suitable prior to installation, to identify whether problems at an existing site are due to interference, or to provide warnings of the presence of interference on a continuous basis. In particular, information on timing — for example finding a time of day or day of the week when interference is regularly seen — may assist in determining the source of the interference.
This research forms part of the GNSS Availability Accuracy Reliability anD Integrity Assessment for timing and Navigation (GAARDIAN) project, which provides a mesh of sensors to monitor the integrity, reliability, continuity, and accuracy of the locally received GPS (or other GNSS) and eLoran signals continuously and to detect anomalous conditions such as local interference, differentiating between possible sources of errors such as interference, multipath, satellite errors, or space weather.
Here we look at using the signal-to-noise ratio (SNR) values from a single-frequency GPS receiver to detect interference. There are two stages to the algorithm: determining the local environment of the antenna in terms of multipath and interference, and identifying and recording potential interference events.
Since this method uses values output from a GPS receiver, characterizing the response to interference of the receiver used in the probe is necessary, to indicate what level interference can be detected with the system, as well as ensuring that false positives are not produced, and the effects of interference can be separated from those of multipath and scintillation, which can also cause decreases in SNR.
We used a commercial, single-frequency receiver, recording this data from NMEA messags for analysis:
SNR, in dB, reported as an integer
elevation, in degrees, reported as an integer
azimuth, in degrees, reported as an integer
carrier lock time, in seconds.
Algorithm. To determine the presence of interference, the normal state of the receiver must first be calculated. Initially it is assumed the receiver is fixed with an unchanging multipath environment. SNR and elevation values from all satellites are accumulated for several hours. To reduce influence of the unknown multipath environment, values from satellites below 10 degrees elevation and from those where the carrier lock time is less than four minutes are removed from the data set.
A polynomial fit between elevation and SNR is then calculated from the remaining data. A second- or third-degree polynomial generally fits the high-elevation data with deviations from the profile at low elevations being primarily due to multipath where interference is not present.
The standard deviation of SNR at each elevation is then calculated. The combination of the polynomial and these values of standard deviation characterize the normal environment of the receiver, for the case where interference is not present in the data gathered (Figure 1).
Figure 1. Raw SNR data against elevation, for all satellites in view over a period of 12 hours (blue), and a polynomial fitting to the same data (green).
To confirm that the threshold values returned by the first stage of the algorithm are valid, a value is calculated for the elevation where the SNR value drops below the polynomial curve by the greatest amount.
If interference is not present, this is normally found at the point where multipath begins to influence the incoming signal and can be considered as a rough multipath cutoff, used to remove signals that may be influenced by multipath from later stages of the analysis.
Assuming a well-sited antenna, a value greater than 25 degrees for this value indicates the possible presence of interference in the data used to calculate the polynomial. In cases where this value is high, the data in question would be rejected, and optionally a user may be warned that there may be pre-existing interference. If the antenna-receiver combination has been previously calibrated in a known good environment, it would be also possible to identify interference based on the difference in polynomial and standard deviation values between that environment and the location being tested.
Figure 2 shows the value of this multipath cutoff (in degrees) for a set of data where interference was known to be present initially, against the start time for the data used to calculate the polynomial and multipath cutoff values, by number of hours from the start of the file.
Once the mask is developed, a threshold value can be set to be n standard deviations below the polynomial, and events are detected by the combination of:
At least four satellites with elevations above the multipath cutoff which are below the threshold value or which were above the multipath cutoff previous to losing lock.
This status is continuous for more than a set time t.
Requiring multiple satellites limits the effects of other influences on SNR such as multipath; requiring an extended time period removes very short-term fluctuations.
The number of false positives and the power of interference required to cause an alarm then depends primarily on the value of the threshold factor n, and on the time period t, which here we kept at a constant of 30 seconds.
Testing
To avoid radiating interference, we constructed an RF network to facilitate injection of jamming signals into the GPS signal path. The GPS signal from a roof-mounted choke-ring antenna was passed through an amplifier and attenuator chain to provide 0 dB forward gain, but around 40 dB reverse isolation. An additional stepped attenuator (0–40 dB in 1 dB steps) was also included. The buffered signal from the antenna was then combined with the output of a vector signal generator used to provide the jamming signal.
The combined signal was then fed into the GPS receiver via a DC-block to remove the antenna bias voltage. The signal generator is capable of producing a wide variety of jamming including matched spectrum wideband noise, CW, and pulsed signals. The adjustment of both the signal generator output power and the signal attenuator a
llow the replication of a variety of signal-to-noise and jammer-to-noise scenarios.
With the receiver locked onto a stable position, CW signals at L1 frequency were introduced into the receiver at levels from –125 dBm to –90 dBm in steps of 5 dBm, with at least 15 minutes of buffer time for the receiver to recover between each step (Table 1). Data was logged at 1 Hz throughout. We collected 20 hours of data, to calculate threshold values from data with no known interference.
Table 1.
Results
Twelve hours of data from a period where no known interference was present was used to form the SNR mask, and events longer than 30 seconds were looked for using various values of n for the threshold across all 20 hours of data. A false alarm was considered to be any event where interference was detected while the signal generator was off. Table 2 summarizes the response for different threshold levels.
Table 2.
In this test, CW interference of –100 dBm was required before the number of satellites with carrier lock dropped below four even for a single epoch, and –90 dBm was required to cause a sustained loss of lock, but jamming of –105 dBm was still detectable by this system with no false positives returned.
Decreasing the threshold began to produce false positives without detecting the smaller interference signals. This is not surprising as the thermal noise floor, assuming 2 MHz bandwidth, is about –110 dBm.
In the raw data from the detected events, a sharp dip in SNR is often seen at the beginning of an event, followed by recovery as the receiver compensates. In this particular case, where the aim is to detect the interference, this could lead to interference going undetected if the initial sharp dip was underneath the time threshold (30 seconds) and the recovery took the SNR of some of the satellites above the SNR threshold (Figure 3).
Figure 3. Value of polynomial mask (blue) and actual SNR (red) as recorded for four satellites during the period around the injection of the -100 dBm CW signal, showing initial dip and partial recovery.
Conclusion
Using only SNR values from a low-cost L1 GPS receiver, it is possible to detect CW interference which is above the thermal noise floor and below a power that causes loss of position. Different types of interference are expected to produce a different response, and unintentional interference is likely to be broadband or not directly centered on L1. The antenna used may also have a strong effect. These factors have not been examined here, although in practice the algorithm has run in multiple locations with different antennas, both direct and via splitters.
Regardless of the precise type of interference, the system would be expected to detect any interfering signal which impacts the SNR of the receiver, and to do so even if the signal strength was below a level which caused denial of service in that area.
The results are specific to the receiver used and its response to interference, although the algorithm would be capable of using data from any receiver that provided SNR values. Ideally the system used for measurement would have little or no built-in interference rejection.
Although this data was collected and then examined after the fact for signs of interference, the system works in precisely the same way in real time. Further trials will test the algorithm’s performance in real time and with different jamming scenarios, and compare results from multiple receivers in a single location and the performance of the algorithm with different antennas.
Acknowledgments
This work was funded by the Engineering and Physical Sciences Research Council and the Technology Strategy Board.
Jenna R. Tong is a postdoctoral researcher in electronic and electrical engineering at the University of Bath. Her Ph.D. in electron tomography is from the University of Cambridge.
Robert J. Watson received a Ph.D. degree in electronic engineering from the University of Essex, and is senior lecturer in electronic and electrical engineering at the University of Bath.
Cathryn N. Mitchell is a professor of engineering at the University of Bath and the Director of Invert Centre for Imaging Science. She received a Ph.D. from the University of Wales Aberystwyth.
First Overload Interference/Desensitization to GPS Receivers, Systems, and Networks Report to FCC
The joint working group co-led by the U.S. GPS Industry Council and Lightsquared, investigating potential problems of LightSquared/GPS interference, delivered its first monthly report on March 15 as directed by the FCC. The report (PDF) lays out a schedule for receiver selection and testing and names 34 members, two working group co-chairs, and four information facilitators of a technical working group (TWG) supervising and analyzing the assessment of GNSS receivers operating under conditions of a dense national network of high-powered cell-phone transmitters. “TWG members represent a diverse group of interested parties including equipment and chipset manufacturers, aerospace/aviation companies, wireless providers, engineering firms, public safety, and various federal agencies. Additionally, several individuals have volunteered to be advisors to the TWG,” said the report.
The TWG held its first meeting on March 3 in Arlington, Virginia, and via a conference bridge for members around the globe who were unable to attend in person. In that and subsequent teleconferences, the TWG focused on the first seven items from the Work Plan:
Establish pertinent analytical and test methodologies and assumptions underlying the test regime: definition of harmful interference, relevant information regarding terrestrial broadband network, interference analysis assumptions, and evaluation of potential test methodologies.
Select categories of receivers and receivers to be tested.
Develop operational scenarios.
Establish methodology for analyzing test results.
Derive test conditions based on the established operational scenarios.
Write test plan and procedures.
Identify and engage appropriate test facilities.
LightSquared provided technical details to the TWG regarding the equipment planned for its terrestrial broadband deployment, including the channelization plan, output power, out-of-band emission (OOBE) characteristics, and emissions mask.
The GPS community is concerned that desensitization/overload due to strong signals outside of the GPS band may cause GPS receivers to operate in a non-linear mode with reduced gain (that is, gain compression) for the desired GPS signal. Other receiver impairments may also arise as a result of the nearby strong signals.
The TWG has agreed to move forward with a combination of laboratory-based and field-based testing programs. Field testing will be performed at outdoor test locations using transmitters, filters, and antennas similar to those that LightSquared plans to deploy in its commercial operations.
Other items of interest in the report:
Definition of Harmful interference at the GPS/GNSS/Augmentations/L-Band Receiver. “The TWG members have discussed a number of receiver parameters related to the definition of harmful interference. In the FCC Rules, harmful interference is defined as ‘interference which endangers the functioning of a radionavigation service or of other safety services or seriously degrades, obstructs, or repeatedly interrupts a radiocommunication service operating in accordance with [the ITU ] Radio Regulations.’
“Harmful interference affects different types of receivers in different ways. The key factors that pertain to the functioning of GPS receivers and/or whether service is degraded, obstructed, or interrupted are accuracy (position, velocity, time), availability (ability to perform a given function), coverage (within what space can a function be performed), integrity (what is the probability that the results are correct), and continuity (what is the probability that a given function can be completed). Metrics for harmful interference are developed from an understanding of the consequential relationship between negative impacts and receiver parameters, which include effective C/N0, PVT accuracy, time to first fix, loss of lock, cycle slips, etc. The signal conditions to be taken into account are defined in the GPS Standard Positioning Service (SPS) Performance Standard, 4th Edition, Interface Specifications (ISs), GPS policy, and both the present and planned future signal environments will be considered.Environmental and field conditions in which GPS receivers operate will also be considered.
“It should be possible to assess interference impact, up to that which includes harmful interference, using metrics in terms of receiver parameters that include measurable changes in effective C/N0 as well as position accuracy, time to first fix, loss of lock, cycle slips, etc. Related to this discussion is whether there is any margin that could be budgeted for terrestrial broadband operation, and if so, what that amount could be. When considering systems guaranteed for safety-of-life operations, there may be very little or no margin.
“There is general agreement within the TWG that the device testing protocols should include changes in effective C/N0 and degradation of other key performance measures so as not to exclude data that might be relevant for the post-testing analytical phase using operational scenarios.
Overload interference/desensitization at the GPS/GNSS/Augmentations/L-band Receiver. “Desensitization/overload due to strong signals outside of the GPS band may cause the GPS receiver to operate in a non-linear mode with reduced gain (i.e., gain compression) for the desired GPS signal; there may also be other receiver impairments caused by strong signals outside the GPS band. The TWG will consider these mechanisms further after testing is underway and sufficient samples are available to adequately assess such mechanisms.”
Evaluation of Potential Test Methodologies. “The TWG has agreed to move forward with a combination of laboratory-based and field-based testing programs. Laboratory tests are repeatable, allow for the creation of a fully controlled environment and the ability to test multiple scenarios and many devices in an efficient, repetitive manner. Field tests expose devices to a real-world environment where measurements can be performed at various distances and morphologies from terrestrial broadband network sites in order to gauge the effects of distance and physical environments on terrestrial broadband signal strength and potential interference. One advantage of field testing is that it captures a complete, live test environment comprehensively and helps develop keener testing or analysis insights that modeling cannot offer. The major disadvantage or concern is that field testing uses the present environment, not the environment that might exist at some future or past time. Interference testing analysis has to consider worse-case assumptions, and not only the current test reality.
“Laboratory testing will be performed either using conducted testing, where devices are connected directly to transmission sources via 50 ohm connectors, or through radiated testing in anechoic or other radiated emissions chambers. While conducted testing is the preferred laboratory methodology, anechoic chambers will be used where conducted testing is not practical, is not recommended by the manufacturer, or where connectorized devices cannot be made available within the established test timeline.
“Field testing will be performed at outdoor test locations that will utilize transmitters, filters, and antennas similar to those that will be deployed by Lig
htSquared in its commercial operations.”
The TWG identified seven categories of receivers that it considers representative of non-military GPS user equipment operating in the United States: aviation, cellular, general location/navigation, high precison, timing, space-based receivers, and networks.
Seven sub-teams are focusing on these receiver categories. The sub-teams are responsible for determining device selection and prioritization criteria, defining operational scenarios, listing testing conditions and test plan procedures, and recommending appropriate test facilities.
Save Our GPS Coalition Forms
Representatives from a variety of industries and companies have formed the Coalition to Save Our GPS to resolve what it terms a serious threat to the national positioning, navigation, and timing service: the FCC conditional waiver to Lightsquared allowing expansion of terrestrial use of the satellite spectrum immediately neighboring that of GPS, potentially causing severe interference to millions of GPS receivers.
“GPS is essential to Americans every day — it’s in our cars, the airplanes in which we fly and the ambulances, police cars, and fire trucks that help keep us safe. It’s also used in many industrial applications and even synchronizes our wireless, computer, and utility networks,” the group stated. “LightSquared’s plans to build up to 40,000 ground stations transmitting radio signals one billion times more powerful than GPS signals as received on earth could mean 40,000 ‘dead spots’ — each miles in diameter — disrupting the vitally important services GPS provides.”
The Coalition (www.SaveOurGPS.org) includes representatives from aviation, agriculture, transportation, construction, engineering, surveying, and GPS-based equipment manufacturers and service providers.
Initial members of the coalition are the Aeronautical Repair Stations Association, Air Transport Association, Aircraft Owners and Pilots Association, American Association of State Highway and Transportation Officials, American Rental Association, Associated Equipment Distributors, Association of Equipment Manufacturers, Case New Holland, Caterpillar Inc., Edison Electric Institute, Esri, Garmin, General Aviation Manufacturers Association, Deere & Company, National Association of Manufacturers, OmniSTAR, and Trimble. More members are expected to join in the near future.
The following is from a statement issued by the coalition:
“[In] The unusual waiver granted in January to LightSquared by the FCC . . . the usual FCC process of conducting extensive testing followed by approvals was not followed. Instead, the process was approve first, then test. Additional safeguards are needed, so the coalition recommends:
“The FCC must make clear, and the NTIA must ensure, that LightSquared’s license modification is contingent on the outcome of the mandated study. The study must be comprehensive, objective, and based on correct assumptions about existing GPS uses rather than theoretical possibilities.
“The FCC should make clear that LightSquared and their investors should not proceed to make any investment in operating facilities prior to a final FCC decision (or at least make it explicit that they do so at their own risk). While this is the FCC’s established policy, it failed to make this explicit in its order.
“Further, the FCC’s, and NTIA’s, finding that ‘harmful interference concerns have been resolved’ must mean ‘resolved to the satisfaction of preexisting GPS providers and users.’ Resolution of interference has to be the obligation of LightSquared, not the extensive GPS user community of millions of citizens. LightSquared must bear the costs of preventing interference of any kind resulting from operations on LightSquared’s frequencies.
“This is a matter of critical national interest. There must be a reasonable opportunity for public comment of at least 45 days on the report produced by the working group.”
WAAS Official Again
The Federal Aviation Administration (FAA) announced on March 18 that WAAS PRN 135 has resumed normal operations. “The WAAS team recently received the final report from Lockheed Martin on the failure of Galaxy 15,” reported FAA GNSS program manager Leo Eldredge. “After a review of that report, the team determined that the satellite was ready to be returned to operations.”
The FAA said that PRN 135 is currently located at ~120°W and enroute to its final destination of 133.1°W, but is now broadcasting operational corrections that can be used by both aviation and ground users, including those in Northwest Alaska.
In April 2010, satellite operator Intelsat reported it had lost contact with PRN 135 (named Galaxy 15) and it was drifting uncontrolled. At that time, the FAA reported that it would drift out of WAAS service within a few weeks. Instead, PRN 135 remained within a usable condition/location, although drifting east, until December 2010, when it ceased operating. On December 23, Intelsat reported that the power from the Galaxy 15 battery completely drained during its loss of Earth lock and the baseband equipment command unit reset, as it was designed to do. Shortly thereafter Galaxy 15 began accepting commands, and Intelsat engineers began receiving telemetry in the operations center.
Intelsat determined that static electricity charge caused the initial failure, and has uploaded new software to prevent the event from occurring again. There are now three operational WAAS GEO satellites:
◾ PRN 133 located at 98°W.
◾ PRN 135 located at 133.1°W (currently at ~120°W); will arrive at 133.1°W on or about April 4, 2011.
◾ PRN 138 located at 107.3°W.
EGNOS SOL Operational
The European Geostationary Navigation Overlay Service (EGNOS) was declared operational for safety-of-life (SOL) services on March 2. The service consists of GPS corrected signals intended for transport applications, particularly aviation, where lives could be endangered if the performance of the navigation system is degraded.
The SOL coverage area, expected performances, and conditions of use are described in the EGNOS Safety-Of-Life Service Definition Document (SDD, see env-gpsworld-integration.kinsta.cloud/egnosSOL). The two operational EGNOS satellites — Inmarsat-3-F2/AOR-E at 15.5 degrees west longitude using PRN code 120, and Artemis at 21.5 degrees east longitude using PRN code 124 — now transmit Message Type 2, indicating that the signals are available for safety-critical purposes.
Air-navigation service providers can now publish SBAS precision approach procedures, localizer performance with vertical guidance (LPV), based on EGNOS. On March 22, EGNOS operator European Satellite Services Provider published the first EGNOS LPV approaches for use at Pau Airport, near the Pyrénées in southern France.
EGNOS improves accuracy and provides integrity to the GPS signal over most of Europe and parts of North Africa. The system uses a monitoring network of 40 ground stations to provide the corrections with 99.9 percent availability over the core service region. Accuracy is measured by GPS user equivalent range error typically about 4.2 meters after EGNOS corrections for GPS signals from satellites at a 5-degree elevation, and 2.4 meters for satellite signals arriving from a 90-degree elevation. If reliability falls below a minimum level, EGNOS users are alerted within six seconds.
Russian SBAS Satellite Passes Transponder Tests
The Luch-5A geostationary communication satellite under construction has successfully completed a cycle of transponder tests. The satellite includes a transponder for the System for Differential Correction and Monitoring (SDCM), the Russian satellite-based augmentation system. SDCM will provide integrity monitoring of
GPS and GLONASS satellites and differential corrections and analyses of GLONASS performance: real-time differential corrections with horizontal accuracy of 1–1.5 meters, vertical of 2–3 meters.