The GPS World team participated in ION GNSS+ 2024, held at the Hilton Baltimore Inner Harbor, Baltimore, from Sept. 16-20.
The event showcased more than 400 technical presentations spanning six sectors, addressing commercial and policy dimensions and research advancements. GPS World had the opportunity to engage in a series of discussions and panels, including a plenary session full of stories of space, and of circumnavigating the globe in a sailboat using only paper charts, a compass, and a sextant to navigate.
(Photo courtesy of ION)
Bob Addiss, senior software engineer at CAST Navigation, demonstrated CAST’s latest GNSS simulation systems. CAST GNSS systems can be configured to simultaneously provide multiple constellation types on each antenna element, such as GPS (including Y-Code, SAASM, M-Code AES and MNSA), BeiDou and GLONASS.
(Photo courtesy of ION)
Joshua Morales, StarNav CEO, led a demonstration of cold start positioning and timing using a StarNav receiver and simulated Xona PULSAR signals. The receiver tracked up to 13 PULSAR satellites simultaneously, producing real-time signal tracking and PNT data with a Safran GSG-8 simulator. This demonstration showcased StarNav’s receiver capabilities for LEO satellite-based PNT.
(Photo courtesy of ION)
More than 1,000 in-person attendees explored the show floor, visiting 44 exhibits. They had the opportunity to network, engage with exhibitors and dive deeper into the latest products and trends in the industry.
Abstracts for the ION GNSS+ 2023 show, “GNSS + Other Sensors in Today’s Marketplace,” are due March 3.
ION GNSS+ will take place Sept. 11-15 at the Hyatt Regency Denver at Colorado Convention Center in Denver.
ION GNSS+ 2023 is the world’s largest international technical meeting and showcase of GNSS technology, products and services. The show aims to bring together leaders in GNSS and related positioning, navigation and timing to present advances, introduce new technologies, update current policy, demonstrate products and exchange ideas.
The two tracks covered during the show will be commercial and policy tracks and research tracks.
The commercial and policy tracks will include navigation for mass market, autonomous and safety critical applications and future trends in navigation. The research track will cover multisensor and autonomous navigation, algorithms and methods and advanced GNSS technologies.
Interested parties may submit their abstracts on the ION GNSS+ 2023 website.
Photo: William Barton/iStock/Getty Images Plus/Getty Images
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following five focused on advanced technologies in high-precision GNSS. Papers are available at www.ion.org/publications/browse.cfm.
Railway health with GPS + Galileo
Railway infrastructure and vehicle maintenance expenditures are estimated to cost more than €20 billion per year at the European level. This indicates the demand for developing a low-cost system capable of providing prognostic information about the health status of the railway at the points of the interaction between the vehicle and the infrastructure (wheelset, pantograph, rail and catenary). To achieve these capabilities, SIA (System for vehicle-infrastructure Interaction Assets health status monitoring) is being developed by a consortium from five different European countries. Within the SIA, events are captured by a network of sensors, which are time stamped and then accurately geo-referenced by the positioning sub-system of SIA. The positioning sub-system is based on European GNSS (EGNSS) positioning algorithms tailored for the railway environment and comprises onboard as well as back-office processing.
GNSS-based positioning in the railway environment is very challenging. Hence, Galileo with its advanced signal structure is utilized in SIA (in addition to GPS) to improve availability as well as accuracy.
The onboard positioning algorithm has been developed based on a novel GNSS-inertial measurement unit (IMU) hybridized approach. The new approach can overcome frequent measurement gaps within the GNSS observations and maintain the accuracy level required by the SIA. An overview of the back-office positioning in SIA complements the presentation of the onboard processing.
Citation. Moradi, Ramin, Zheng, Yuheng, Hutchinson, Michael, Roth, Michael, Jahan, Kanwal, Goya, Jon, Alvarado, Unai, “Positioning for Train-infrastructure Asset Health Status Monitoring within the SIA-project,” Proceedings of ION GNSS+ 2020, pp. 2948–2959. https://doi.org/10.33012/2020.17636
Snapshot positioning
Snapshot positioning — from a very brief interval of the received satellite signal — is becoming popular for various applications. This paper studies the feasibility of achieving real-time kinematic (RTK) positioning using snapshot data, a method termed Snapshot RTK (SRTK). A major difference of this positioning method is the generation of code and carrier-phase GNSS observables, a procedure the authors explain. To explore the feasibility of achieving RTK under different scenarios, the rate of integer ambiguity resolution (IAR) is assessed by using snapshot measurements generated with different integration times and signal bandwidths under zero-baseline configuration. Under these assumptions, the key factor that influences the RTK fix rate is the code measurement noise. Double difference code measurement errors are evaluated and plotted with the resulting IAR fix rates to find the relationship between them. The performance of using multi-constellation and multi-frequency signals is tested as well. The fix rate can reach 100% when multiple constellations are used. The achieved positioning accuracy is shown to be less than 5 mm in horizontal domain when IAR is achieved successfully.
Citation. Liu, Xiao, Ribot, Miguel Ángel, Gusi-Amigó, Adrià, Closas, Pau, Garcia, Adrià Rovira, Subirana, Jaume Sanz, “RTK Feasibility Analysis for GNSS Snapshot Positioning,” Proceedings of ION GNSS+ 2020, September 2020, pp. 2911–2921. https://doi.org/10.33012/2020.17768
Cooperative positioning
Advances in low-latency communications networks combined with the paradigm of Intelligent Transportation Systems (ITS) have opened opportunities to develop network-based collaborative positioning and navigation. Recent research has fostered the concept of networked GNSS receivers supporting the sharing of raw measurements with other receivers connected to the network. Such measurements (for instance, pseudorange and Doppler) can be processed through Differential GNSS techniques to retrieve inter-receiver distances that can be integrated to improve positioning performance.
This paper investigates an improved Bayesian estimation for a sensorless, tight integration of Differential GNSS-based collaborative measurements through a modified particle filter. A particle filter natively supports the non-Gaussian noise distribution characterizing GNSS-based inter-receiver distances, so the proposed particle filter was designed, implemented and optimized according to the architecture of a proprietary INS-free GNSS software receiver and tested with realistic RF signals, thus showing remarkable improvement in positioning accuracy.
Citation. Minetto, Alex, Gurrieri, Alessandro, Dovis, Fabio, “DGNSS-based Cooperative Positioning using Statistics-Adaptive Particle Filter,” Proceedings of ION GNSS+ 2020, pp. 2652–2666. https://doi.org/10.33012/2020.17530
Virtual base station
RTK (Real Time Kinematic) is a positioning approach that provides centimeter level accuracy by using a reference station. When the rover and the base station are in proximity (short baseline), all common mode errors are eliminated by the double difference, allowing carrier phase ambiguity resolution. But in medium and long baseline cases, ionospheric and tropospheric delays are not completely eliminated, which affects positioning accuracy. This has limited the application of RTK, especially in certain regions where the closest base station is more than 50 km away.
Algorithms like RTK long baseline and VBS (virtual base station) have emerged as an alternative. The virtual base station (VBS) algorithm processes surrounding bases to generate a virtual one within a short distance of the moving rover. By doing so, atmospheric errors will continue to be eliminated in the double-difference model, and, presumably, RTK processing will be assured all across continents.
In this paper, a performance assessment of the algorithm is conducted under various conditions, including high ionospheric activity, high baseline, harsh multipath environments and, finally, in a long trajectory. The results show that the developed VBS algorithm ensures centimeter-level accuracy even under the harshest conditions.
Citation. Saidani, M., Sarri, P., Guinamard, A., Maya, D. Gallego, “Virtual Base Station Algorithm and Performance Assessment,” Proceedings of ION GNSS+ 2020, pp. 2696–2709. https://doi.org/10.33012/2020.17533
Open-world virtual reality
The Open-World Virtual Reality (OWVR) concept combines precise GNSS positioning and a smartphone-grade inertial sensor to provide globally-referenced centimeter-and-degree accurate tracking of a virtual reality headset. Unlike existing augmented and virtual reality systems, which perform camera-based inside-out headset tracking relative to a local reference frame (for instance, an ad-hoc frame fixed to a living room), OWVR’s globally referenced tracking enables a VR experience in which the user’s outdoor exploration is robust to extremes in lighting conditions and local visual texture. This paper introduces the OWVR concept and presents a prototype system with two candidate sensor-fusion architectures, one loosely and one tightly coupled. Comparative performance is evaluated in terms of tracking accuracy and availability of an integer-aperture-test-validated fixed tracking solution. For scenarios with degraded GNSS availability, which will be typical for outdoor VR, the tightly coupled architecture is shown to offer a critical tracking robustness advantage.
Citation. Humphreys, Todd E., Kor, Ronnie Xian Thong, Iannucci, Peter A., Yoder, James E., “Open-World Virtual Reality Headset Tracking,” Proceedings of ION GNSS+, pp. 2931–2947. https://doi.org/10.33012/2020.17635
By Rick Hamilton, CGSIC Executive Secretariat, U.S. Coast Guard Navigation Center
The 59th meeting of the U.S. Civil GPS Service Interface Committee was held Sept. 16-17 at the Hyatt Regency Miami hotel in Miami, Florida, in conjunction with the Institute of Navigation’s GNSS+ (ION-GNSS+) conference.
For readers who were unable to attend, a synopsis of the meeting is provided below. The full agenda and presentations are available for download from the GPS.gov website.
The meeting of the CGSIC is an annual event, free and open to the public, conducted to provide updates from U.S. GPS program officials and ensure effective information exchange between the U.S. government and civil GPS users.
The two-day meeting is hosted by the U.S. Department of Transportation (DOT) and the Coast Guard Navigation Center (NAVCEN). DOT serves as the civil lead for GPS and chairs the CGSIC in this capacity. NAVCEN is assigned duties as Deputy Chair and Executive Secretariat for the CGSIC.
Engaging sessions were conducted throughout the day of Sept. 16 for the CGSIC Timing, Surveying Mapping and Geo-Sciences, and International Information Subcommittees. The plenary session of the full committee was held on Sept. 17.
Keynote. Diana Furchtgott-Roth, deputy assistant secretary, Office of the Assistant Secretary for Research and Technology, U.S. Department of Transportation provided the keynote for this year’s plenary session.
She conveyed to the audience the importance of the U.S. GPS for transportation safety and numerous other civil applications and that its spectrum must be protected from harmful interference.
However, given threats from jamming and spoofing, the U.S. is committed to leading the world in positioning, navigation and timing (PNT) and to building and using the best possible PNT solutions to maintain resiliency.
James Platt, director at the PNT Program Management Office of the U.S. Department of Homeland Security, highlighted the need to understand cyber vulnerabilities in critical infrastructure supply-chain management.
The meeting included many other interesting briefings related to the status of the U.S. GPS program and the use of GPS around the world, including presentations from the National Space-Based PNT Coordination Office, U.S. Air Force, State Dept., FAA, DOC and NASA.
Presentations during the plenary session focused on the operational status of the GPS constellation and ground control system modernization, U.S. Space-Based PNT policy, GPS augmentation systems, U.S. engagement with other international GNSS providers, as well as a variety of topics related to the status and progress of ongoing GPS programs in the U.S. government.
If you have suggestions for topics to include in upcoming CGSIC meetings, would like to present a topic, or if you found information from past meetings useful and would like to hear more, contact Hamilton via the Navigation Center “contact us” form. Be sure to select “Civil GPS Service Interface Committee (CGSIC)” from the pull-down menu.
From a GPS operational perspective, civilian non-aviation users can submit GPS-related inquiries or report signal interference or degradation to the U.S. Coast Guard Navigation Center online or to the 24 hour watch desk at 703-313-5900.
Civil aviation users within the United States should contact the Federal Aviation Administration for GPS user support. The GPS Operations Center at Schriever Air Force Base, Colorado, is the lead in the Department of Defense for operational issues and questions from military users of GPS.
The GPS World staff is reporting live from ION GNSS+ Sept. 16-20 in Miami, providing news, photos, videos and more. According to show organizers, this year’s conference brings together international leaders in GNSS and related positioning, navigation and timing fields to present new research, introduce new technologies, discuss current policy, demonstrate products and exchange ideas.
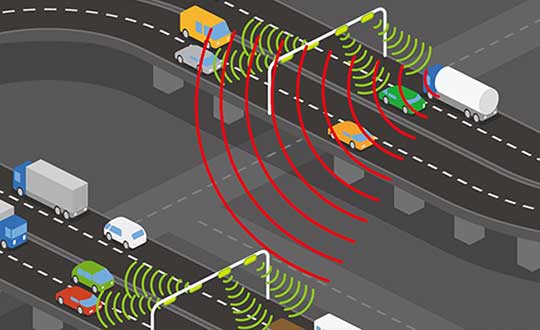
Recent years have seen an increase in drivers turning to cheap GNSS jamming devices in order to move around undetected or to thwart built-in anti-theft systems or road tolling systems. These jammers not only knock out their own GNSS receiver, they also block GNSS signal reception in a radius of several hundred of meters.There is a growing demand for automatic detection of these illegal jammers to help catching the offending driver.
Septentrio GNSS antenna placement on highway gantry. (Photo: Septentrio)
An ION GNSS+ 2018 presentation by Wim de Wilde and Jean-Marie Sleewaegen presentation showed how a multi-antenna GNSS receiver with built-in RF spectrum monitor and adequate processing tool can efficiently detect and classify jamming events and identify the offending car or truck. They conducted a five-day test with two Septentrio AsteRx-U dual-antenna receivers installed on an overhead structure above a busy highway.
In parallel to the GNSS tracking and built-in anti-jam functionality, the AsteRx-U can simultaneously sample the RF signal from its two antennas. One of the objectives of the test was to evaluate the possibility to perform lane detection by cross-correlating the jamming signal received by the two antennas. In addition, the antennas were mounted with a significant inclination angle to create an asymmetrical reception pattern.
The goal was to assess the feasibility of detecting the driving direction from the time series of the received jammer power. Such lane or direction detection would greatly help identifying the offending driver in heavy traffic conditions when more than one vehicle crosses the overhead structure at the time of the jamming.
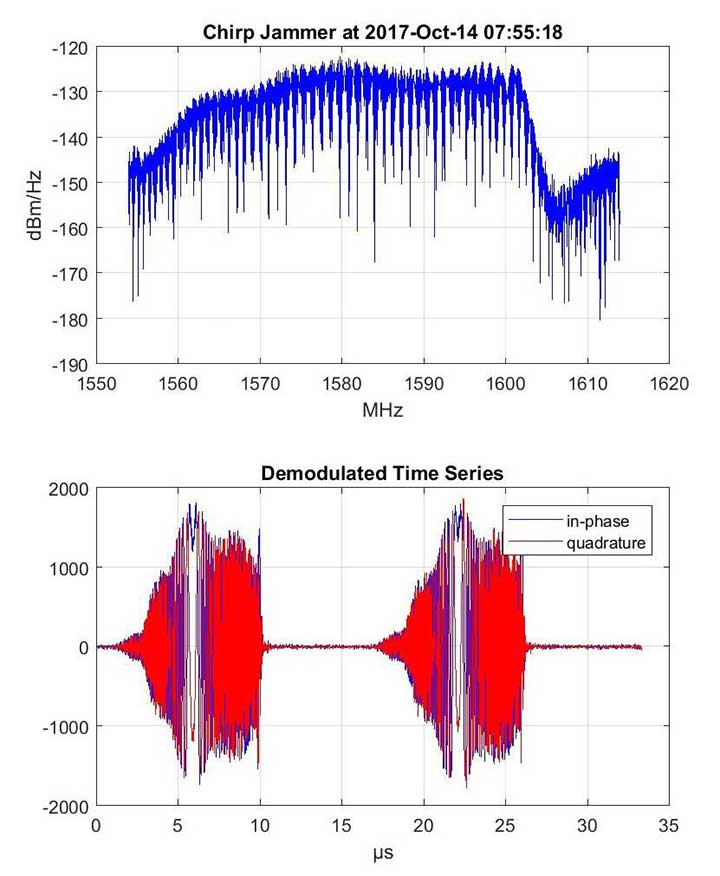
Over the five days of the experiment, 45 jamming events were recorded and analyzed, most of them intentional: continuous wave, chirp or even less-known pulse jammers.
Chirp jammer example. (Charts: Septentrio)
The researchers explained how the jamming events are automatically detected and classified by the processing tool, using pattern recognition to distinguish between intentional harmful events and unintentional interferences. They presented selected cases illustrating the RF signature of the most prevailing types of jammer.
They then addressed the direction and lane sensing algorithm and discussed the effect of multipath propagation of the jammer signal. All algorithms are illustrated with real-life examples.
A year-long project aboard a commercial cargo ship collected tens of thousands of snapshots of radio-frequency interference in the GNSS band on a passage from Spain to Korea and back. Most interference was detected in busy port areas, less interference while transiting along coasts, and while least frequent, interference was still found in the open ocean.
Researchers at the German Aerospace Center (DLR) are still analyzing the vast amount of GNSS disruption data collected during the year-long project. Two papers have already been published about this project, and more are on the way, according to principle researcher Emilio Pérez Marcos.
In a paper presented at the Institute of Navigation last year, Marcos and his co-authors outlined the results of the last five months of this unique sampling experiment. Detection equipment was mounted on a large Hapag-Lloyd container ship. The antenna was mounted about 50 meters above the water line and provided a line-of-sight of 25km or more. The L1/E1 and L5/E5a frequency bands were continuously monitored. In addition to a “Snapshot” recording device used to save raw data samples (time snapshots), a more resilient DLR multi-antenna receiver was used to assess the impact of interferences in beamforming array GNSS receivers (semi-resilient).
As might be expected, the most interference was detected in busy port areas. Less interference was experienced while transiting along coasts. While it was the least frequent, interference was still detected during open ocean transits.
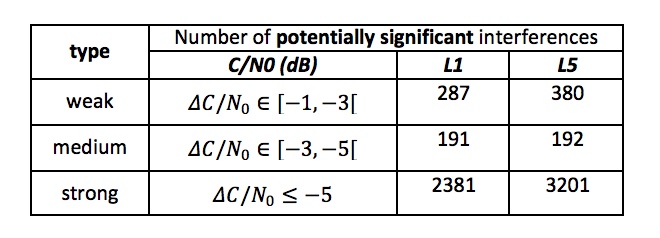
Table: Emilio Pérez Marcos and co-authors
Of the 39,045 snapshots recorded, 6,632 contained radio frequency interference at 1dB or higher. Separate tests have shown that many single antenna GNSS receivers begin to perform poorly with interference signals greater than 1dB. The other 32,413 snapshots could represent interference signals that may have come from weaker transmitters, sources more distant from the ship, been the result of adjacent band transmissions, or other phenomena.
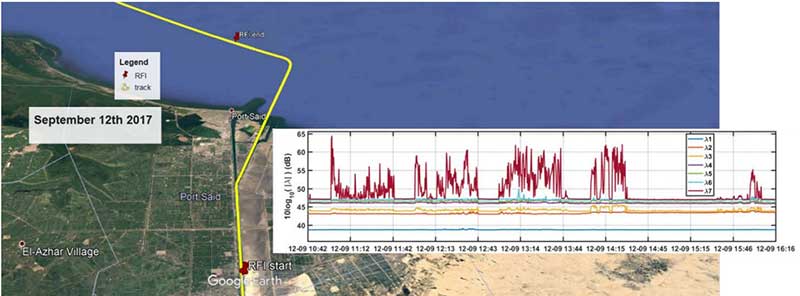
Three particularly strong and persistent interference incidents were noted in the paper.
The first was detected when the vessel was transiting the Suez Canal northbound. The interference lasted around five hours and 60km. At several points the interference prevented the DLR semi-resilient GNSS receiver from working properly, which would mean that any single antenna GNSS receiver would cease to function completely.
Vessel going north in Suez Canal. RFI detectable during approx. 60 km. Inset: Eigenvalues during the 5 hours that the RFI was detectable. (Graphic: Emilio Pérez Marcos)
The second caused the DLR receiver to fail when the vessel was entering Jebel Ali, the port of Dubai in the United Arab Emirates. The DLR receiver provided some resilience thanks to its beamforming capabilities; again any other receiver would have suffered the interference effects earlier being unable to provide any PVT. The receiver did not return to proper operation for 11 days and 5,000km. The reason for this is uncertain and under investigation.
Particularly strong interference (45dB) caused the third incident and resulted in the DLR receiver failing for three days. It began when the ship was entered the highly trafficked Malacca Straits.
The equipment used also allowed researchers to determine direction of arrival for the interfering signals and to evaluate whether the interference was a spoofing signal.
For the reported strong interference events, DLR consulted the captain of the ship, who attested and confirmed the loss of PVT in the ship’s own GNSS receiver, with all the consequences that this implies for the systems that rely on it.
The paper, “Interference and Spoofing Detection for GNSS Maritime Applications,” was presented at the ION GNSS+ conference in Miami in September of 2018. It described the last phase of a yearlong measurement effort aboard the ship by DLR. An earlier phase of the campaign has also been published in E. P. Marcos et al., “Interference awareness and characterization for GNSS maritime applications,” 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, 2018.
The authors are preparing additional papers to describe more of the results from the larger project.
Due to the extended impasse between U.S. Congressional leaders and the White House that has created a partial U.S. government shutdown, the Institute of Navigation (ION) has decided to postpone the Cognizant Autonomous Systems for Safety Critical Applications (CASSCA) Conference, originally scheduled to take place Jan. 28-29 at the Hyatt Regency Reston in Reston, Virginia.
The government shutdown has impacted CASSCA speakers and attendees and brought uncertainty about the number of government officials working in autonomous systems who are currently furloughed, making this decision inevitable.
The CASSCA Conference has been rescheduled for Sept. 16-17 in Miami, in parallel with ION GNSS+.
“The ION is committed to this strong and dynamic technical program and is confident this venue will provide maximum exposure and networking opportunities for the highly esteemed invited speakers and conference attendees,” the institute said in a press release. A revised program is available.
The ION’s International Technical Meeting (ITM) and Precise Time and Time Interval (PTTI) Systems and Applications meeting will proceed as scheduled, Jan.28-31, at the Hyatt Regency Reston, Reston, Virginia. ITM/PTTI 2019 is heavily supported by academia, industry and the U.S. Department of Defense; ITM/PTTI pre-registration levels are currently trending ahead of 2018 and the technical program is strong.
ION GNSS+ 2019 organizers are accepting abstracts for the conference, which is set to take place Sept. 16-20 in Miami.
The conference, themed, “GNSS + Other Sensors in Today’s Marketplace,” will feature two tracks: the commercial and policy tracks and research track.
The commercial and policy tracks cover mass market and commercial applications, current status and future trends in GNSS, and high performance and safety critical applications. The research track will cover autonomous systems technology, robust multi-sensor navigation and advanced GNSS.
According to show organizers, authors whose abstracts are accepted in these sessions (either as a primary or as an alternate presenter) will have the option to have their paper peer-reviewed.
ION GNSS+ is a technical meeting and showcase of GNSS technology, products and services. The show gathers international leaders in GNSS and related positioning, navigation and timing fields to present new research, introduce new technologies, update current policy, demonstrate products and exchange ideas.
Averna’s David Brace offers a rundown on the company’s RP-6500 RF Record and Playback platform at ION GNSS+ 2018, which took place Sept. 24-28 in Miami. According to the company, real-time GNSS simulation and SATCOM signal generator toolkits will now be available for its RP-6500 RF Record and Playback platform, making it an all-in-one solution to support advanced satellite navigation applications.
The Institute of Navigation presents Dr. Oliver Montenbruck with prestigious Johannes Kepler Award at the ION GNSS+ 2018 Conference. (Photo: ION)
The Institute of Navigation’s (ION) Satellite Division presented Oliver Montenbruck with its Johannes Kepler Award on Sept. 28 at the ION GNSS+ Conference in Miami. The Kepler Award recognizes and honors an individual for sustained and significant contributions to the development of satellite navigation. It is the highest honor bestowed by the ION’s Satellite Division.
Montenbruck was honored for his pioneering contributions to GPS for navigation of space vehicles, the advancement of multi-GNSS understanding, and tracking networks to support scientific and societal benefit.
He is head of the GNSS Technology and Navigation Group at DLR’s German Space Operations Center and an affiliated professor for GNSS at the Technical University of Munich. His research activities have been devoted to spaceborne GNSS applications, where he made contributions in the fields of receiver technology, autonomous navigation systems, spacecraft formation flying and precise orbit determination.
These range from development of the first meter-level autonomous navigation system for micro-satellites based on Kalman-filtered GPS observations, to detailed modeling of user spacecraft antenna phase-center variations, non-gravitational forces and ambiguity fixing techniques that support GNSS-based POD precision to the 1-centimeter level in support of space geodesy.
His unique expertise in the field has resulted in numerous consultancy tasks for national and European space industry and agencies. Focusing on the new satellite navigation systems, he has pioneered the advancement of monitoring networks, characterization of new navigation signals, GNSS performance assessment and multi-GNSS processing.
A GPS World Leader
In 2014, Montenbruck was honored with the GPS World Leadership Award, Products Category, for “Bringing SatNav Future into View: A Platform for Early Familiarization with New Constellations” (see his remarks here.) He also has authored several articles for the magazine, including:
He pioneered the expansion of global monitoring networks for new and modernized GNSS, initiating the Cooperative Network for GNSS Observation (CONGO), which has been a primary source of information for early assessment of Galileo, BeiDou, GPS L2C and L5 signals. His leadership and research have contributed to a thorough understanding of new GNSS constellations, enabled the full exploitation of new signals, advanced satellite technology and made multi-GNSS available to a wider community.
Montenbruck is an active member ION and past member of council. He serves on the IGS Governing Board and key working groups. Within the International GNSS Service (IGS), Montenbruck chairs the Multi-GNSS Working Group and coordinates the performance of the Multi-GNSS Project (MGEX).
Montenbruck is widely recognized for his frequently cited textbooks, ~100 publications in peer-reviewed journals, more than 250 conference papers and the Springer Handbook of Global Navigation Satellite Systems, which he co-edited and authored/co-authored. He is a recipient of the ION’s Tycho Brahe Award and the DLR Senior Scientist Award as well as the GPS World Leadership Award.
Montenbruck received his Ph.D. in 1991 and Habilitation in 2006 from the Technical University of Munich. He has supervised more than 25 master and a dozen Ph.D. theses, and served on defense committees at several international universities. As a visiting scientist, he conducted joint research projects at various international institutions, including the University of Texas at Austin, the European Space Agency, and the University of Bern.
Spirent Federal Systems’ Tyson Gurney discusses the company’s upcoming release of SimMNSA at ION GNSS+ 2018 in Miami. According to the company, SimMNSA implements the Modernized Navstar Security Architecture, taking the next step in GPS signal modernization.