The U.S. Coast Guard Navigation Center has issued a notice that GPS satellite SVN-77 (PRN-14) was set healthy for initial use on Dec. 2 at 0131Z. This follows the U.S. Space Force announcement that the satellite, the fourth GPS III (SV04), received Operational Acceptance approval on Dec. 1.
SVN-77 is the 23rd satellite to broadcast L2C, the second civil GPS signal at 1227.6 MHz. L2C is not yet designated as “operational” by the U.S. Space Force.
However, the L2C signal is set to healthy, and users can utilize this signal at their own risk.
The U.S. Air Force’s Lockheed Martin-built next generation GPS III satellite on orbit. Rendering portrays GPS III Space Vehicles (SVs) 01-10. (Artist’s Rendering: Lockheed Martin)
SVN-77 is the 16th satellite to begin broadcasting the third civil GPS signal, L5, specifically designed for aviation use in an internationally protected band of spectrum designated for aeronautical navigation at 1176.45 MHz. L5 continues to broadcast an unhealthy designation.
SVN-77 is the fourth satellite broadcasting the new L1C signal at 1575.42 MHz.
The next GPS III satellite, SVN-78, initially scheduled to launch in January, will launch no earlier than July 1, 2021.
Garmin has debuted the GPSMAP 65, 65s and 66sr, three new portable devices with improved technology, precision and connectivity. GPSMAP is the company’s line of premium outdoor navigation units.
The GPSMAP 65, 65s and 66sr offer multiband technology for positioning and tracking anywhere. They are the first Garmin portable devices to receive and use multiple satellite navigation frequencies.
The multi-band technology and expanded GNSS support with addition of the L5 frequency (GPS, GLONASS, Galileo, QZSS and IRNSS) allows for reduced estimated position error, giving users improved accuracy and awareness of their surroundings.
The new models include TopoActive maps of Europe, smartphone notifications, color screens, battery improvement, compatibility with the Garmin Explore app and more. All three are rugged, dust, shock and water resistant (IPX71 rated).
“We are excited to grow our popular lineup of GPSMAP handhelds and introduce multiple GPS frequencies into the series,” said Dan Bartel, Garmin vice president of global consumer sales. “We’ve expanded our satellite support so you can explore with confidence, no matter where you go or what the conditions are.”
GPSMAP 66sr
The premium version, GPSMAP 66sr, has a 3-inch color screen readable in all lighting conditions and is compatible with night-vision goggles. In addition, it has been designed to military standards for thermal performance and resistance to shock and water (MIL-STD-810G), and includes a built-in S.O.S. LED flashlight for assistance. To give the user even more confidence, incorporates ABC sensors (3-axis electronic compass), accelerometer and barometric altimeter), allowing users to obtain the most accurate data available at all times.
GPSMAP 66sr also provides global forecasts and weather through the Active Weather feature, updated through wireless connectivity via Bluetooth and ANT +. Via the Wi-Fi connection, users can download satellite maps.
According to Quectel, this paper details the challenges eMobility providers face in enabling vehicles such as eScooters and eBikes to be located in deep urban canyons. The white paper also examines why accurate location data will be vital in enabling the ride-sharing industry to comply with regulation to restrict eMobility usage on sidewalks and other areas, Quectel said.
The report also details drive test data conducted on an eScooter in San Francisco. The data demonstrates the enhanced accuracy offered by L1 and L5 plus dead reckoning capability.
Finally, the white paper discusses how the Quectel LC79D is enabling the eMobility industry to harness the fusion of different sensors in a very small footprint at low incremental cost with unparalleled accuracy, the company added.
“eMobility providers face substantial challenges when dealing with location in deep urban environments,” said Mark Murray, vice president of sales for GNSS and automotive at Quectel. “First and foremost, customers need to be able to find the vehicle and cities need to have the assurances that these eBikes and eScooters are operated in mutually agreed locations.”
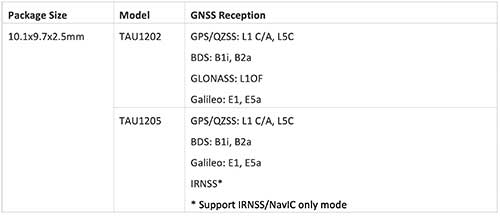
Allystar Technology Co. Ltd. has launched the dual-band multi-GNSS modules TAU1202/TAU1205, which support both the L1 and L5 bands to enhance sub-meter positioning accuracy. Constellations received include GPS, Galileo, GLONASS, BeiDou, QZSS and IRNSS.
Besides the L1 band, TAU1202 and TAU1205 also support L5/B2a/E5a, which are expected to have lower noise and significantly reduced multipath mitigation because of the higher chipping rate of L5 signals relative to L1 C/A code.
Chart: Allystar
TAU1205 supports IRNSS (NavIC) which makes it suitable for navigation in the urban areas of India and the Middle East, as there are seven NavIC satellites with a higher elevation than both GPS and Galileo satellites.
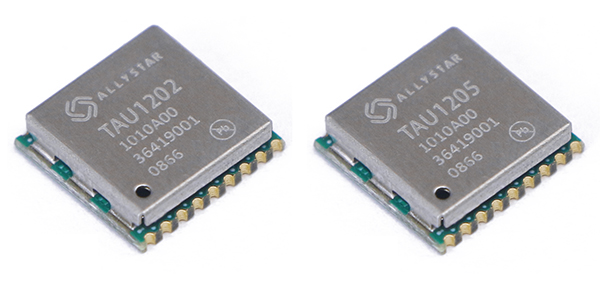
Photo: Allystar
Powered by Allystar Cynosure III GNSS chipset and with built-in low-noise amplifier and surface acoustic wave (SAW) filter, TAU1202 and TAU1205 provide higher sensitivity, ensuring exceptional acquisition and tracking performance even in weak signal areas.
Based on 40-nm manufacturing processes of the Cynosure III GNSS chipset and state-of-the art internal PMU, TAU1202/TAU1205 comes with very low power consumption at less than 40 mA.
Multiple communication interfaces including UART and I2C simplify customer designs and provide a better time-to-market for customers’ products.
“Due to its excellent performance in urban area, compact design and concurrent multi-GNSS reception, TAU1202/TAU1205 has become a popular selection for vehicle and asset tracking in worldwide,” said Zhang Yanping, Allystar product line manager. “The launch of TAU1202/TAU1205 shows Allystar continues to drive GNSS evolution in thte navigation mass market.”
Allystar started TAU1202/TAU1205 mass production in the second half of 2019.
BCM4776 chip utilizes 30 new L5 signals to deliver higher navigational accuracy and yield
Photo: Broadcom
Broadcom introduced in 2017 the first mass-market implementation of dual frequency: BCM4775. This chip makes use not only of the classic L1 frequency broadcast by every satellite, but also of the more advanced L5 signal broadcast by a subset of the satellites.
The use of this enhanced L5 signal improves the accuracy of GNSS in an urban scenario, as it mitigates the main source of error: the reflections in the nearby buildings, also known as multipath. It also improves GNSS in an open-sky scenario, allowing submeter accuracy, a previously unmet performance bar in smartphones until now. Ever since, the BCM4775 has been adopted in flagship smartphones, smartwatches and fitness devices.
Given the unabated need for better precision and accuracy, Broadcom has introduced its second-generation dual-frequency GNSS solution — the BCM4776.
The new chip is capable of using the new BeiDou-3 constellation’s B2a signals (the Chinese indicator for L5). It will be able to track 30 new L5 signals (60 percent more) with a significant impact on accuracy. End users will experience much higher reliability of the submeter accuracy inherent to dual-frequency L1-L5.
Image: Broadcom
Second generation dual-frequency GNSS will be used for innovative lane-level driving navigation instructions, allowing driving applications to know which highway lane the vehicle is in. Expect instructions like “move one lane to the right so you don’t miss your next highway exit” or “move one lane to the left to take the pool lane and save 10 minutes.”
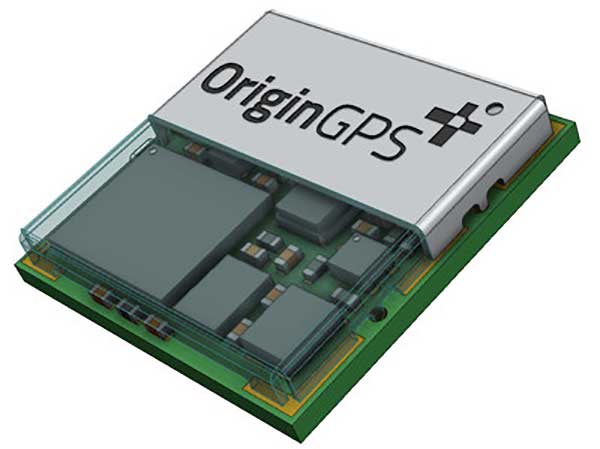
OriginGPS has collaborated with Broadcom to create a new miniature module with L1 + L5 support provided by the BCM47758 chip, enabling ultra-accurate GNSS positioning. The module was developed for solutions requiring super-precision GNSS and a dual-frequency combination.
Photo: OriginGPS
The ORG4600-B01 is OriginGPS’ first dual-frequency GNSS module. The module enables customers to build solutions with sub-1-meter accuracy without implementing external components.
Measuring 10 x 10 mm, the ORG4600-B01 module supports L1 + L5 GNSS reception with one RF port, enabling the use of a low-cost, dual-band antenna delivering sub-1-meter accuracy performance in real-world operating conditions.
Alternate Build. An alternate build option allows for separate L1/L5 RF outputs when dual antennas are required. The ORG4600-B01 is suitable for solutions requiring ultra-accurate positioning, such as telematics, the Internet of Things (IoT) and auto OBD applications.
“This year has seen several satellites launched into orbit every month, most of them fitted with L5/E5 capabilities, and the Chinese and European Union governments plan to have their satellite constellations fully operational by 2020.” said Haim Goldberger, CEO of OriginGPS.
Developing the ORG4600-B01 module with the BCM47758 GNSS receiver chip by Broadcom Inc. was the fastest and surest way to add a high-quality dual-frequency module to our portfolio and meet our customers’ increasing requirements for ultra-accurate GNSS modules,” Goldberger said.
“Size is a crucial parameter in GNSS dual-frequency solutions,” said Prasan Pai, product marketing director for the Wireless Communications and Connectivity Division at Broadcom. “The collaboration with OriginGPS has created the industry’s smallest dual-frequency module with ‘no compromise’ quality. For our customers seeking an ultra-accurate GNSS solution in a compact form factor, the ORG4600-B01 fits the bill. The collaboration enables Broadcom to reach new markets, such as precision agriculture, security, children tracking and fleet management.”
“OriginGPS is interested in additional partnerships to enable bringing advanced solutions to market quickly,” said Haim Goldberger, CEO of OriginGPS.
OriginGPS is presenting its products with real-life demonstrations at MWC 2019, Los Angeles, Oct 22-24, Booth S2938.
The NavIC Indian constellation is now supported in NovAtel’s latest firmware release for its OEM7 series of GNSS receivers.
The 7.05.04 firmware release for OEM7 provides the following benefits:
Users can achieve a single point position accuracy of 2.5 m (rms) using NavIC L5 signals (from the Indian Regional Navigation Satellite System) with GPS L1 on the newly available JSN model.
Access to the L5 frequencies on the OEM7600 and OEM7720 provides triple-frequency capabilities to unlock the potential of GPS L5, Galileo E5a and AltBOC, Beidou B2a and NavIC L5.
A full listing of all changes in this release are included in the “What’s New” document included in the firmware download package. Visit this page to download the latest firmware for a specific platform. Visit NovAtel’s documentation portal for the OEM7 reference manual.
After extensive ground and space testing, the SES-5 GEO satellite has entered into the European Geostationary Navigation Overlay Service (EGNOS) operational platform, broadcasting EGNOS Signal-In-Space (SIS), according to the European GNSS Agency (GSA).
SES-5 — which replaces Inmarsat-4F2 — will ensure reliable EGNOS services until 2026. It has been introduced through EGNOS System Release V241M, which will enable a range of performance improvements. In particular, EGNOS will offer even greater stability during periods of high ionospheric activity.
“SES-5 is the first step of the complete renewal of the EGNOS Space Segment, securing the EGNOS services for the next decade and the future transition to the dual-frequency multi-constellation services,” said Carlo des Dorides, GSA Executive Director. “It will be completed by the introduction of the ASTRA-5B signals and the procurement of a new EGNOS payload which are both planned for 2016.”
SES-5, carrying EGNOS L1 and L5 band payloads, was launched in July 2012. The integration of a second EGNOS SBAS L1/L5 band payload on SES ASTRA-5B GEO satellite is currently ongoing. The introduction of this second SES GEO satellite for EGNOS is planned at the end of 2016. SES won the contract following an open-tender procedure.
“SES is looking forward to many years of successful operation in delivering EGNOS services to the European citizens and beyond,” said Ferdinand Kayser, chief commercial officer at SES.
EGNOS is operated by the European Satellite Services Provider (ESSP), under contract by the GSA on behalf of the European Commission.
Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and multipath in their performance to GPS L1 and L5. Raw noise and multipath level of the Galileo signals is shown to be smaller than those of GPS. Even after smoothing, Galileo signals perform somewhat better than GPS and are less sensitive to the smoothing time constant.
By Mihaela-Simona Circiu, Michael Felux, German Aerospace Center (DLR), and Sam Pullen, Stanford University
Several ground-based augmentation system (GBAS) stations have become operational in recent years and are used on a regular basis for approach guidance. These include airports at Sydney, Malaga, Frankfurt and Zurich. These stations are so-called GBAS Approach Service Type C (GAST C) stations and support approaches only under CAT-I weather conditions; that is, with a certain minimum visibility. Standards for stations supporting CAT-II/III operations (low visibility or automatic landing, called GAST D), are expected to be agreed upon by the International Civil Aviation Organization (ICAO) later this year. Stations could be commercially available as soon as 2018.
However, for both GAST C and D, the availability of the GBAS approach service can be significantly reduced under active ionospheric conditions. One potential solution is the use of two frequencies and multiple constellations in order to be able to correct for ionospheric impacts, detect and remove any compromised satellites, and improve the overall satellite geometry (and thus the availability) of the system.
A new multi-frequency and multi-constellation (MFMC) GBAS will have different potential error sources and failure modes that have to be considered and bounded. Thus, all performance and integrity assumptions of the existing single-frequency GBAS must be carefully reviewed before they can be applied to an MFMC system. A central element for ensuring the integrity of the estimated position solution is the calculation of protection levels. This is done by modeling all disturbances to the navigation signals in a conservative way and then estimating a bound on the resulting positioning errors that is valid at an allocated integrity risk probability.
One of the parameters that is different for the new signals and must be recharacterized is the residual uncertainty attributed to the corrections from the ground system (σpr_gnd). A method to assess the contribution of residual noise and multipath is by evaluating the B-values in GBAS, which give an estimate of the error contribution from a single reference receiver to a broadcast correction. Independent data samples over at least one day (for GPS) are collected and sorted by elevation angle. Then the mean and standard deviations for each elevation bin are determined.
Here, we evaluate the E1 and E5a signals broadcast by the operational Galileo satellites now in orbit. In the same manner as we did for GPS L5 in earlier research, we determine the σpr_gnd values for these Galileo signals. As for GPS L5, results show a lower level of noise and multipath in unsmoothed pseudorange measurements compared to GPS L1 C/A code.
DLR GBAS Facility
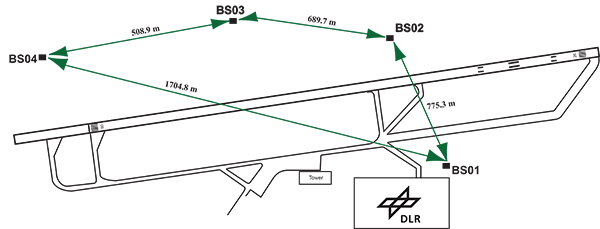
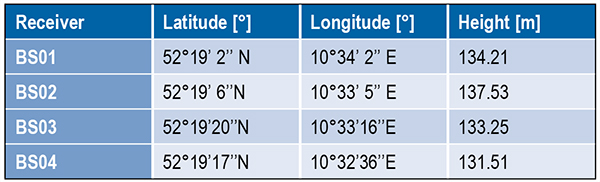
DLR has set up a GBAS prototype at the research airport in Braunschweig (ICAO identifier EDVE) near the DLR research facility there. This ground station has recently been updated and now consists of four GNSS receivers connected to choke ring antennas, which are mounted at heights between 2.5 meters and 7.5 meters above equipment shelters. All four receivers are capable of tracking GPS L5 (in addition to GPS L1 and L2 semi-codeless) and Galileo E1 and E5a signals. Figure 1 gives an overview of the current ground station layout, and Table 1 gives the coordinates of the antennas.
Figure 1. DLR ground facility near Braunschweig Airport, also shown in opening photo at left.Table 1. Ground receiver antenna coordinates.
Smoothing Techniques
The GBAS system corrects for the combined effects of multiple sources of measurement errors that are highly correlated between reference receivers and users, such as satellite clock, ephemeris error, ionospheric delay error, and tropospheric delay error, through the differential corrections broadcast by the GBAS ground subsystem. However, uncorrelated errors such as multipath and receiver noise can make a significant contribution to the remaining differential error. Multipath errors are introduced by the satellite signal reaching the antenna via both the direct path from the satellites and from other paths due to reflection. These errors affect both the ground and the airborne receivers, but are different at each and do not cancel out when differential corrections are applied.
To reduce these errors, GBAS performs carrier smoothing. Smoothing makes use of the less noisy but ambiguous carrier-phase measurements to suppress the noise and multipath from the noisy but unambiguous code measurements.
The current GBAS architecture is based on single-frequency GPS L1 C/A code measurements only. Single-frequency carrier smoothing reduces noise and multipath, but ionospheric disturbances can cause significant differential errors when the ground station and the airborne user are affected by different conditions. With the new available satellites (GPS Block IIF and Galileo) broadcasting in an additional aeronautical band (L5 / E5), this second frequency could be used in GBAS to overcome many current limitations of the single-frequency system.
Dual-frequency techniques have been investigated in previous work. Two dual-frequency smoothing algorithms, Divergence Free (Dfree) and Ionosphere Free (Ifree), have been proposed to mitigate the effect of ionosphere gradients.
The Dfree output removes the temporal ionospheric gradient that affects the single-frequency filter but is still affected by the absolute difference in delay created by spatial gradients. The main advantage of Dfree is that the output noise is similar to that of single-frequency smoothing, since only one single-frequency code measurement is used as the code input (recall that carrier phase noise on both frequencies is small and can be neglected).
Ifree smoothing completely removes the (first-order) effects of ionospheric delay by using ionosphere-free combinations of code and phase measurements from two frequencies as inputs to the smoothing filter. Unlike the Dfree, the Ifree outputs contain the combination of errors from two code measurements. This increases the standard deviation of the differential pseudorange error and thus also of the position solution.
Noise and Multipath in New GNSS Signals
GBAS users compute nominal protection levels (H0) under a fault-free assumption. These protection levels are conservative overbounds of the maximum position error after application of the differential corrections broadcast by the ground system, assuming that no faults or anomalies affect the position solution. In order to compute these error bounds, the total standard deviation of each differentially corrected pseudorange measurements has to be modeled. The standard deviation of the residual uncertainty (σn, for the nth satellite) consists of the root-sum-square of uncertainties introduced by atmospheric effects (ionosphere, troposphere) as well as of the contribution of the ground multipath and noise. In other words, these error components are combined to estimate σn2 as described in the following equation:
(1)
The ground broadcasts a value for σpr_gnd (described later in the section) associated with the pseudorange correction for each satellite. These broadcast values are based on combinations of theoretical models and actual measurements collected from the ground receivers that represent actual system characteristics. Unlike the ground, σpr_air is computed based entirely on a standardized error model. This is mainly to avoid the evaluation of multipath for each receiver and each aircraft during equipment approval.
In addition to the characteristics of nearby signal reflectors, multipath errors are mainly dependent on signal modulation and other signal characteristics (for example, power, chip rate). In earlier research, we showed that the newly available L5 signals broadcast by the GPS Block IIF satellites show better performance in terms of lower noise and multipath. This mainly results from an increased transmitted power and a 10 times higher chip rate on L5 compared to the L1 C/A code signal.
In this work, we extend this evaluation to the new Galileo signals and investigate their impact on a future multi-frequency, multi-constellation GBAS. Characterization of these new signals is based on ground subsystem measurements, since no flight data with GPS L5 or Galileo measurements are available at the moment. We assume that the improvements observed by ground receivers are also applicable to airborne measurements. This assumption will be validated as soon as flight data are available.
The measurements used were collected from the DLR GBAS test bed over 10 days (note that Galileo satellite ground track repeatability is 10 sidereal days) between the December 14 and 23, 2013. In that period, four Galileo and four Block IIF GPS satellites were operational and broadcast signals on both aeronautical bands E1 / L1 and E5a / L5.
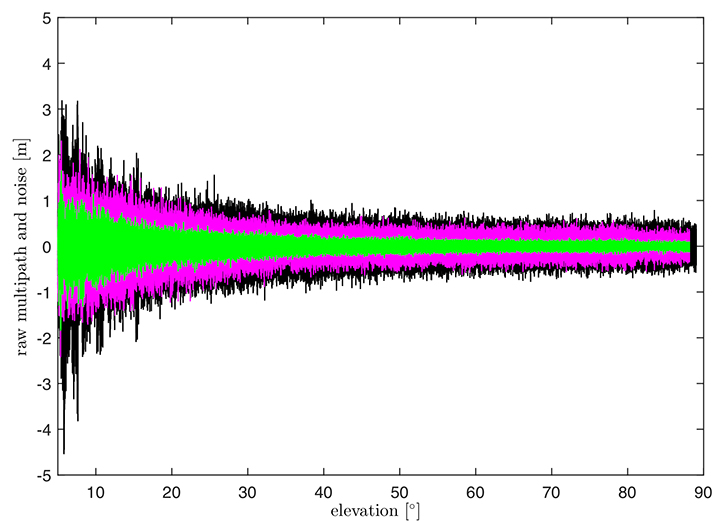
In Figure 2, the suppression of multipath and noise on the Galileo signals can be observed, where the code multipath and noise versus elevation for GPS L1 C/A BSPK(1), Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals are shown. The code multipath and noise was estimated using the linear dual-frequency combination described in equation (2), where MPi represents the code multipath and noise on frequency i, ρi the code measurement, and ϕi,and ϕj represent the carrier-phase measurements on frequencies i and j, respectively. Carrier phase noises are small and can be neglected.
(2)
Figure 2. Raw multipath function of elevation for GPS L1, Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals.
The multipath on the Galileo E1 (BOC(1,1)) signal (the magenta curve) is lower than the GPS L1 C/A (BPSK(1))(black curve), especially for low elevation, where the advantage of the E1 BOC(1,1) is more pronounced. The lower values can be explained by the wider transmission bandwidth on E1 and the structure of the BOC signal. Galileo E5a (green data in Figure 2) again shows a better performance than Galileo E1. This was expected due to the higher chip rate and higher signal power. A comparison of the raw multipath and noise standard deviations for GPS L1, L5 and Galileo E1, E5a signals is presented in Figure 3.
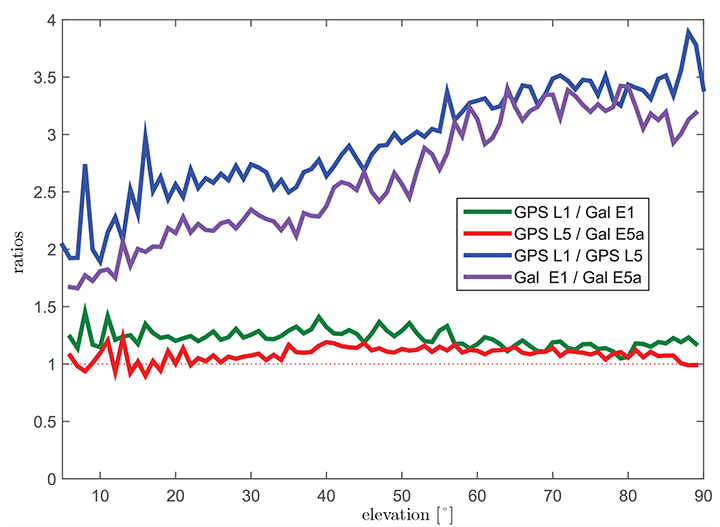
Figure 3. Ratios of the multipath and noise standard deviation function of elevation.
The curves there show the ratios of the standard deviations for each elevation bin. The values for GPS L1 are almost 1.5 times larger than those for Galileo E1 BOC(1,1) (green curve) for elevations below 20°. For high elevations, the ratio approaches 1.0. This corresponds to the observations in the raw multipath plot ( Figure 2). With the same signal modulation and the same chip rate, E5a and L5 have very similar results (red curve), and the ratio stays close to 1.0 for all elevations.
The blue and the purple curves in Figure 3 show the ratio of GPS L1 C/A (BPSK(1)) and GPS L5 (BPSK(10)), and Galileo E1 (BOC(1,1)) and Galileo E5a (BPSK(10)), respectively. The ratio of GPS L1 to GPS L5 (blue curve) increases with elevation from values around 2.5 for low elevations, reaching values above 3.5 for elevations higher than 60°. As Galileo E1 performs better, the ratio between Galileo E1 and Galileo E5a (purple curve) is smaller, from a value of 1.5 for elevations below 10 degrees to a value of 3.0 for high elevations.
Until now, we have presented the evaluation of raw code noise and multipath. However, in GBAS, carrier smoothing is performed to minimize the effect of code noise and multipath. The value that describes the noise introduced by the ground station is represented by a standard deviation called σpr_gnd and is computed based on the smoothed pseudoranges from the reference receivers. In the following section, we focus on the evaluation of σpr_gnd using different signals and different smoothing time constants. Note that, in this study, σpr_gnd contains only smoothed multipath and noise; no other contributions (for example, inflation due to signal deformation or geometry screening) are considered.
B-values and σpr_gnd
B-values represent estimates of the associated noise and multipath with the pseudorange corrections provided from each receiver for each satellite, as described in Eurocae ED-114A and RTCA DO-253C. They are used to detect faulty measurements in the ground system. For each satellite-receiver pair B(i,j), they are computed as:
(3)
where PRCTX represents the candidate transmitted pseudorange correction for satellite i (computed as an average over all M(i) receivers), and PRCSCA(i,k) represents the correction for satellite i from receiver k after smoothed clock adjustment, which is the process of removing the individual receiver clock bias from each reference receiver and all other common errors from the corrections. The summation computes the average correction over all M(k) receivers except receiver j. This allows detection and exclusion of receiver j if it is faulty. If all B-values are below their thresholds, the candidate pseudorange correction PRCTX is approved and transmitted. If not, a series of measurement exclusions and PRC and B-value recalculations takes place until all revised B-values are below threshold. Note that, under nominal conditions using only single-frequency measurements, the B-values are mainly affected by code multipath and noise.
Under the assumption that multipath errors are uncorrelated across reference receivers, nominal B-values can be used to assess the accuracy of the ground system. The standard deviation of the uncertainty associated with the contribution of the corrections (σpr_gnd) for each receiver m is related to the standard deviation of the B-values by:
(4)
where M represents the number of the receivers and N represents the number of satellites used. The final sigma takes into account the contribution from all receivers and is computed as the root mean square of the standard deviation of the uncertainties associated with each receiver (Equation 4).
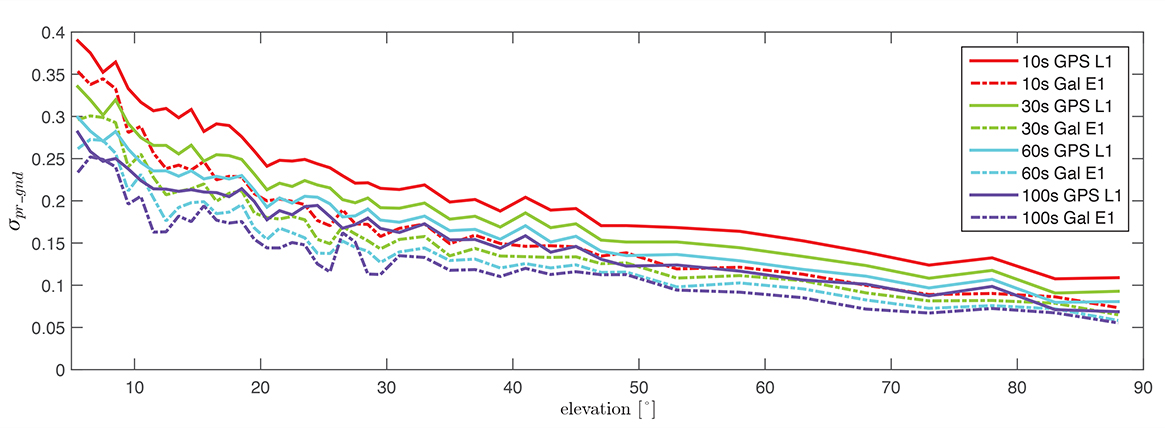
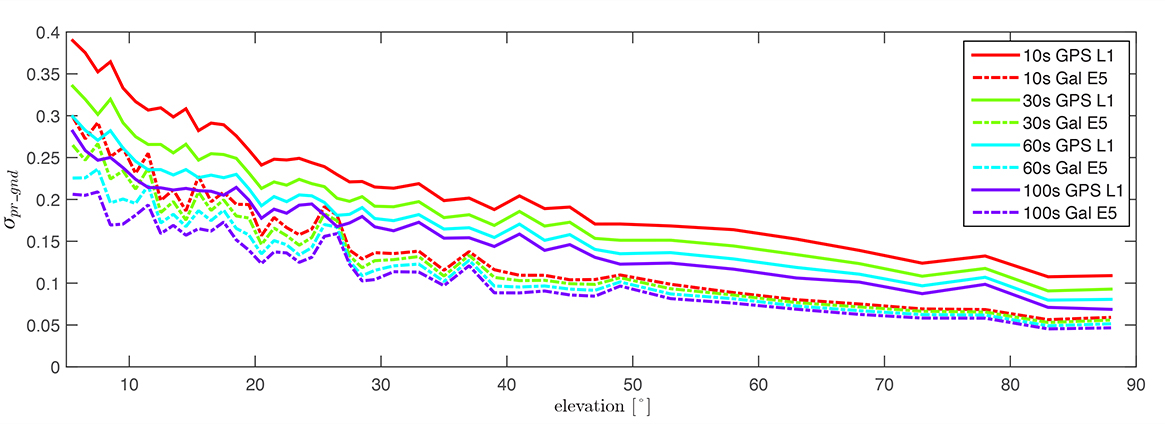
Figure 4 shows the evaluation of (σpr_gnd) for the Galileo E1, BOC(1,1) signal and the GPS L1 C/A signal for increasing smoothing time constants (10, 30, 60, and 100 seconds). Starting with a 10-second smoothing constant, Galileo E1 shows much better performance than GPS L1. The difference shrinks as the smoothing constant increases due to the effectiveness of smoothing in reducing noise and short-delay multipath. However, even with 100-second smoothing (the purple curves), Galileo E1 BOC(1,1) shows lower values of (σpr_gnd).
Figure 4. σ(pr_gnd) versus elevation for Galileo E1 (dotted lines) and GPS L1 (solid lines for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
A similar comparison is presented in Figure 5, of the performance of GPS L1 and Galileo E5a. The Galileo E5a signal is significantly less affected by multipath, and the difference stays more pronounced than in the Galileo E1 – GPS L1, even with 100-second smoothing. It can be also observed that the Galileo signals have a lower sensitivity to the smoothing constant. The Galileo E1 signal shows an increase of sensitivity for low elevations (below 40°), while on E5a, a smoothing constant larger than 10 seconds has almost no impact on the residual error. Thus, a shorter smoothing constant on Galileo E5a generates approximately the same residual noise and multipath a 100-second smoothing constant on GPS L1.
Figure 5. σ(pr_gnd) versus elevation for Galileo E5a (dotted lines) and GPS L1 (solid lines) for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
The values for (σpr_gnd) are, however, impacted by the number of satellites which are used to determine a correction. Since only a very limited number of satellites broadcasting L5 and Galileo signals are currently available, these results should be considered preliminary. The first evaluations strongly indicate that with the new signals, we get better ranging performance. Based on the performance advantage of the new signals, a decrease of the smoothing constant is one option for future application. This would reduce the time required (for smoothing to converge) before including a new satellite or re-including a satellite after it was lost.
In the current GAST-D implementation, based on GPS L1 only, guidance is developed based on a 30-second smoothing time constant. A second solution, one with 100 seconds of smoothing, is used for deriving the Dv and Dl parameters from the DSIGMA monitor and thus for protection level bounding (it is also used for guidance in GAST-C). During the flight, different flight maneuvers or the blockage by the airframe can lead to the loss of the satellite signal.
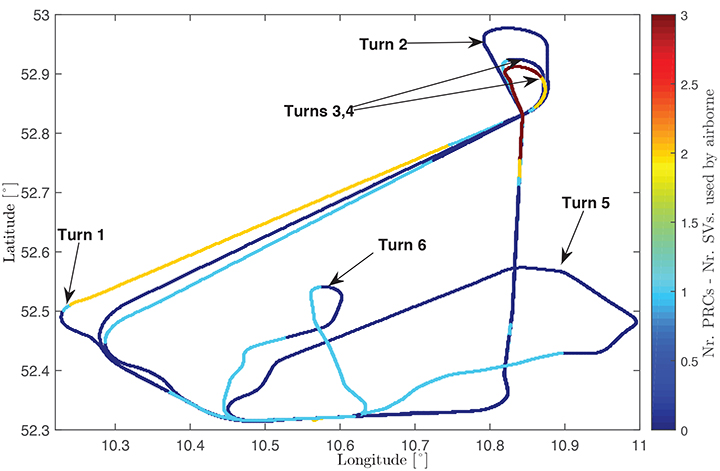
Figure 6 shows the ground track of a recent flight trial conducted by DLR in November 2014. The colors represent the difference between the number of satellites used by the ground subsystem (with available corrections) and the number of satellites used by the airborne subsystem in the GAST-D position solution. One of the purposes of the flight was to characterize the loss of satellite signals in turns. In turns with a steeper bank angle, up to 3 satellites are lost (Turns 1, 3, and 4), while on a wide turn with a small bank angle (Turn 2), no loss of satellite lock occurred. It is also possible for airframe to block satellite signals, leading to a different number of satellites between ground and airborne even without turns.
Figure 6. Ground track of a flight trial conducted by DLR. The colors represent difference between number of SVs used by the ground system and number of SVs used by the airborne.
With this in mind, a shorter smoothing constant would allow the satellites lost to turns or to airframe blockage to be re-included more rapidly in the position solution. However, a new smoothing constant would have to be validated with a larger amount of data. Data from flights trials has to be evaluated as well to confirm that similar levels of performance are reresentative of the air multipath and noise.
In a future dual-frequency GBAS implementation, an important advantage of lower multipath and noise is to improve the Ifree position solution. In earlier research, we demonstrated that the error level of the Dfree solution is almost the same as for single-frequency, but an increase in error by a factor of 2.33 was computed for the Ifree standard deviation based on L1 C/A code and L2 semi-codeless measurements.
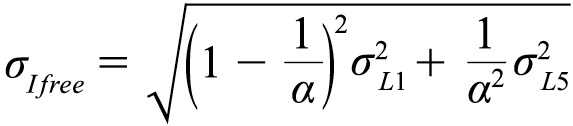
If the errors on L1 (E1) and L5 (E5a) code and carrier phase measurements are statistically independent the standard deviation of the σIfree can be written as,
(5)
where α=1−f 21 ∕ f 25, and σL1,σL5 represent the standard deviations of the smoothed noise and multipath for L1 (E1) and L5 (E5a), respectively. Considering σpr_gnd,L1(E1)) = σpr_gnd,L5(E5a)) in equation (5), the noise and multipath error on Ifree (σIfree) increases by a factor of 2.59.
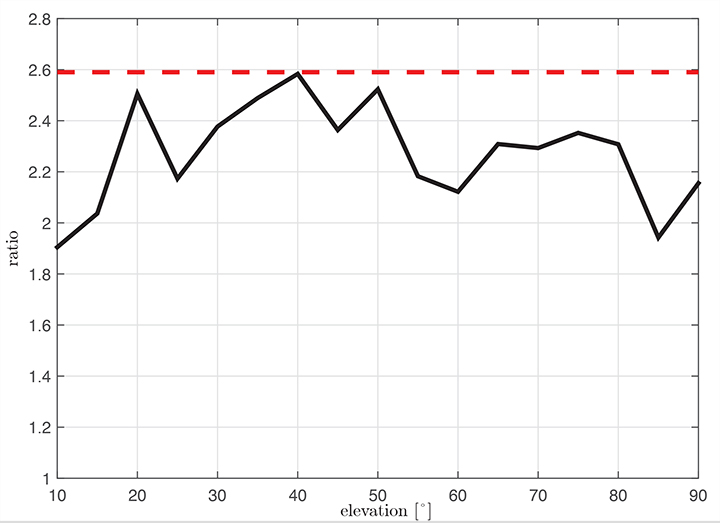
Figure 7 shows the ratio σIfree/σL1 using measured data. We observe that the measured ratio (the black curve) is below the theoretical ratio computed based on the assumption of statistically independent samples (the constant value of 2.59). This is explained by the fact that the multipath errors in the measurements are not independent but have some degree of statistical correlation. The standard deviations are computed based on the same data set used in the raw multipath and noise assessment using 100-second smoothed measurements sorted into elevation bins of 10° spacing.
Figure 7. Measured ratio σIfree/σL1 function of elevation.
Conclusion
We have shown how GBAS can benefit from the new signals provided by the latest generation of GPS and Galileo satellites. We have demonstrated improved performance in terms of lower noise and multipath in data collected in our GBAS test bed. When GBAS is extended to a multi-frequency and multi-constellation system, these improvements can be leveraged for improved availability and better robustness of GBAS against ionospheric and other disturbances.
Acknowledgment
Large portions of this work were conducted in the framework of the DLR internal project, GRETA.
Manufacturers
The ground facility consists of four JAVAD GNSS Delta receivers, all connected to Leica AR 25choke ring antennas.
Mihaela-Simona Circiu is is a research associate at the German Aerospace Center (DLR). Her research focuses on multi-frequency multi-constellation Ground Based Augmentation System. She obtained a 2nd level Specialized Master in Navigation and Related Applications from Politecnico di Torino.
MIchael Felux is is a research associate at the German Aerospace Center (DLR). He is coordinating research in the field of ground-based augmentation systems and pursuing a Ph.D. in Aerospace Engineering at the Technische Universität München.
Sam Pullen is a senior research engineer at Stanford University, where he is the director of the Local Area Augmentation System (LAAS) research effort. He has supported the FAA and others in developing GNSS system concepts, requirements, integrity algorithms, and performance models since obtaining his Ph.D. from Stanford in Aeronautics and Astronautics.
U.S. Air Force Space Command will be implementing CNAV messages on the GPS L2C and L5 signals beginning April 28 at 14:30 UTC, to facilitate user familiarization and development of compatible user equipment. No GPS satellite outages or degradations are planned. The L2C and L5 CNAV messages should be transparent to users.
A 30-day public comment period on the pre-operational CNAV message ended April 4, apparently without enough concern to halt or delay the implementation.
These pre-operational signals may not comply with all requirements, and so shouldn’t be used for safety-of-life or other critical purposes, Air Force Space Command said.
Full text of the NANU appears below:
Subject: New NANU 2014038
NOTICE ADVISORY TO NAVSTAR USERS (NANU) 2014038 NANU TYPE: GENERAL
*** GENERAL MESSAGE TO ALL GPS USERS *** The purpose of this notification is to inform users of an upcoming event related to the GPS satellite constellation. Air Force Space Command will be implementing CNAV messages on the GPS L2C and L5 signals beginning J118/1430z with updates from the control segment approximately twice per week. The message populated signal content will include Broadcast Message Types (MT) 10, 11, 12, 30, and 33. There are no planned GPS satellite outages or degradations for this activity. L2C and L5 CNAV messages should be transparent to GPS receivers that do not process L2C or L5 CNAV messages. These populated signals are intended to facilitate user familiarization and development of compatible user equipment.
NOTE: Until further notice, the L2C and L5 signals are considered pre-operational. A pre-operational signal means the availability and other characteristics of the broadcast signal may not comply with all requirements of the relevant Interface Specifications and should be employed at the users’ own risk. Therefore these signals should not be used for safety-of-life or other critical purposes. Any military or civil users who encounter user equipment problems following message population of the L2C and L5 signals should contact the applicable POCs identified below as soon as possible. Aviation users should file reports consistent with FAA-approved procedures.
*** GENERAL MESSAGE TO ALL GPS USERS ***
POC: CIVILIAN – NAVCEN AT 703-313-5900, HTTP://WWW.NAVCEN.USCG.GOV
MILITARY – GPS OPERATIONS CENTER at HTTPS://GPS.AFSPC.AF.MIL/GPSOC, DSN 560-2541,
COMM 719-567-2541, [email protected], HTTPS://GPS.AFSPC.AF.MIL
MILITARY ALTERNATE – JOINT SPACE OPERATIONS CENTER, DSN 276-3514,
COMM 805-606-3514, [email protected]
The U.S. National Space-Based Positioning, Navigation, and Timing (PNT) Advisory Board has published the minutes of its December 4–5, 2013, meeting, opening with a quote from Albert Einstein, “We cannot solve our problems with the same thinking we used when we created them,” courtesy of Board Chair Dr. James Schlesinger. Among many other topics addressed, the Board heard a report from Major General Martin Whelan, Director of Requirements, Air Force Space Command, on the road ahead for implementation of the GPS Civil Navigation (CNAV) message on L2C and L5. The subject has stirred some controversy of late, particularly between the U.S. Departments of Transportation (DoT) and Defense (DoD), and DoT is currently seeking public comments on the plan.
The meeting minutes relay the gist of General Whelan’s CNAV remarks as follows:
“While sequestration is having various impacts on DoD budgets, thus far GPS quality, service and refresher plans are unaffected. The FY15 budget is under development.
“CNAV has been under discussion for a considerable time. Currently, L2C and L5 signals are being transmitted, but without a navigation message. AFSPC is working hard to activate these messages as soon as possible. One of the reasons for the delay is that additional time was needed to complete testing prior to activation. Testing began in late summer 2013 and, based on initial test results, a “way ahead” has been plotted. Gen William Shelton, AFSPC commander, wished to assure the Advisory Board of his unwavering commitment to providing full-time broadcast CNAV messaging capability on L2C and L5 as soon as possible.
“The CNAV capability will add diversity and robustness for dual frequency users. Gen Shelton intends to provide details plans to the NCO and a report to the next EXCOM meeting. Current plans are to begin initial broadcasting in the spring of 2014. CNAV uploads will occur twice weekly. The signal will meet GPS Standard Positioning System (SPS) standards, but may not achieve current accuracy levels until full implementation in late 2014.
“CNAV live sky testing occurred in June and was conducted in cooperation with civil, industry, and international partners. The two-week test series included independent assessment and verification. The tests identified four errors that required action. The first, which was addressed in real time, related to implementation of the test series. The second required improvement to the tools suite, which should be totally integrated into the ground segment by December 2014. The third and fourth errors required patches to satellite software. All four issues are now regarded as closed.”
The meeting minutes report this further discussion of CNAV.
“Dr. Schlesinger raised the topic of sequestration and how, based on his early career in budgeting, no budget item is sacrosanct. GPS has enjoyed protection from Deputy Secretary of Defense Ashton Carter, but he is now stepping down and his replacement not yet known. This could provide an opportunity for “the men with the green eyeshades” to come forward to eliminate things.
“Gen Whelan said he agreed that with sequestration, everything – including GPS – is on the table. However, AFSPC continues to strive to avoid any degradation in service. He also welcomed the continued support of the Advisory Board.
“Dr. Schlesinger quoted from a 2006 document: “Our position is to continue to provide the best space-based positioning, navigation and timing service in the world.” The Chinese are now “moving up” on GPS. How is GPS going to stay ahead?
“Gen Whelan said AFSPC is aware of China’s steps in capacity and signal diversity. This, however, does not alter his confidence that GPS remains the “Gold Standard” of world GNSS systems. AFSPC is committed to maintain GPS leadership. However, because of sequestration and budget cuts, this position could not be the position of some people outside of the Air Force.”
A subsequent presentation from the Department of Transportation given by Karen Van Dyke, Director for PNT, DOT Research & Innovative Technology Administration (RITA), did not directly mention CNAV, according to the meeting minutes, but did include this update on civil signal monitoring, taken from the meeting minutes.
“DOT is responsible for performance monitoring of GPS civil signals. She called attention to the International Committee on GNSS’s (ICG’s) transparency principle that “Every GNSS provider should publish documentation that describes the signal and system information, the policies of provision, and the minimum levels of performance offered for its open service.” Currently, this is only done on GPS L1 C/A signals. Performance standards for L2C and L5 have not yet been established. The crucial function of signal/service monitoring is to verify that commitments to GNSS performance are being met. Additionally, monitoring improves the situational awareness for GNSS operators, and provides assurance that any civil service failure is detected and resolved promptly. All these factors support the GPS performance history that has made it the world’s Gold Standard.
“The DOT “GPS Civil Monitoring Performance Specifications” (CMPS) document defines the measurements required to show if performance standards for monitoring GPS’ signals/service are met. The document’s first version was developed in 2005 and listed 193 requirements, covering performance monitoring, signal monitoring, non-broadcast data requirements, and reporting and archiving requirements. The document was later updated to align with the 2008 GPS SPS Performance Standard. The most current CMPS was completed in April 2009 and is available at GPS.gov. Since 1999, DOT has published quarterly reports providing analysis of SPS performance for the Federal Aviation Administration (FAA).”
Further Topics
Other reports delivered to the Advisory Board, and available in the the full meeting minutes, available here, include the following. In addition, many PDFs of the individual reports are available through the meetings Agenda page.
Global Differential GPS System as a Civil Monitoring Utility
Dr. Yoaz Bar-Sever, Manager, Global Differential GPS System, NASA Net Propulsion Laboratory
Automated Driving & Safety Considerations (collision avoidance warning, vehicle-to-vehicle communications, and driverless automobiles)
Russell Shields, PNT Board Member, founder of Ygomi LLC
GPS Disruptions: Efforts to Assess Risks to Critical Infrastructure
The Government Accountability Office’s (GAO) Report on Enhancing Interagency Actions
Eli Albagli, senior analyst, GAO
2013 National Infrastructure Protection Plan (NIPP)
Department of Homeland Security Implementation
Robert Kolasky, Director Strategy and Policy, DHS Office of Infrastructure Protection
Economic Impacts of GPS on Key Sectors in the U. S. Economy
Dr. Nam D. Pham, economist/managing partner, NDP Consulting Group
GNSS Signal Capability – Multi-Constellation Management
Cross-Correlation of Existing & Evolving C/A System Signals
Dr. A. J. Van Dierendonck, AJ Systems
How Far to Take GNSS Interoperability/Interchangeability?
Ken Hodgkins, Office of Space & Advanced Technology, Department of State.
A Federal Register Notice has been published allowing for a 30-day comment period on the proposed CNAV message on L2C and L5. The notice seeks comment from the public and industry regarding plans by the U.S. Air Force to broadcast pre-operational L2C and L5 civil navigation (CNAV) messages from certain GPS satellites beginning in April.
The Department of Transportation is the agency seeking comments. Its concerns about the plan drew ire in January.
“These messages will be formatted in accordance with Interface Specifications IS–GPS–200G and IS–GPS–705C, each dated January 31, 2013. However, a pre- operational signal means the availability and other characteristics of the broadcast signal may not comply with all requirements of the relevant Interface Specifications and should be employed at the users’ own risk,” the notice says.
According to the notice, the Department of Transportation seeks comments on the benefits, risks, or issues to users from the plan, including comments on the appropriate timeline for broadcasting pre-operational CNAV messages. Comments are requested from industry on:
the receiver development benefits and other intended uses of pre-operational signals, and
the benefits and potential impacts to users of continuous pre-operational CNAV messages with L2C and L5 signals set healthy.
The deadline to submit comments is April 4, 2014.
Comments should include the docket number [DOT– OST–2014–0028] and be submitted using one of the following methods:
(3) Mail: Docket Management Facility (M–30), U.S. Department of Transportation, West Building Ground Floor, Room W12–140, 1200 New Jersey Avenue SE., Washington, DC 20590–0001.
(4) Hand delivery: Same as mail address above, between 9 a.m. and 5 p.m., Monday through Friday, except Federal holidays. The telephone number is 202–366–9329.