Locatalite transceiver installation in the White Sands Missile Range Ultra High-Accuracy Reference System, provided by the U.S. Air Force for testing equipment under conditions of GPS jamming.
Provides high-accuracy PNT even when GNSS jammed
A critical capability to predict for GNSS chips and receivers —and for devices using alternative or back-up PNT technologies — is how they will actually perform without GPS.
Filling this need, the U.S. Air Force 746th Test Squadron has declared Initial Operational Capability (IOC) for its new truth reference, the Ultra High-Accuracy Reference System (UHARS) at the White Sands Missile Range in New Mexico. Even when GPS — or any other GNSS system — is being completely jammed, UHARS provides extremely accurate positioning, navigation and time (PNT) over the large area that the system was designed to cover.
“Initial testing shows that UHARS delivers accurate independent PNT as good as, or better than, the Air Force’s current Central Inertial and GPS Test Facility Reference System, so it is perfectly able to support current customer requirements,” said Jim Brewer, chief scientist of the 746th Test Squadron. “However, more data are required to tune the UHARS filter and optimize its accuracy to meet even tighter PNT requirements, which is our objective. When this is achieved, UHARS will deliver truth accuracy for next-generation military capabilities, and we will declare UHARS Full Operational Capability.”
“UHARS is a rack-mounted, tightly integrated system of improved navigation sensors, a data acquisition system and a new post-mission Kalman filter, all of which need to work together,” said John Cao, technical director of the 746th. “It’s working very well, but once we completely measure and characterize the individual components and then tune and validate the filter, the complete system will provide a significantly more accurate reference solution for future airborne and land-based test vehicles in navigation warfare environments where modernized and legacy GPS signals are jammed from friendly or hostile systems.”
LocataLite Transceivers. To achieve these accurate reference solutions, UHARS requires a core Non-GPS Based Positioning System (NGBPS) component capable of operating and providing sub-meter position accuracy in a GPS-denied (jamming) environment.
The NGBPS subsystem of the UHARS program employs a network of ground-based LocataLite transceivers and test vehicle receivers manufactured by the Locata Corporation. The Locata network delivers centimeter-level positioning and navigation as well as nanosecond-level synchronization, which may be useful for military applications requiring precise time transfer in GPS-denied environments.
White Sands is a U.S. Army rocket range of almost 3,200 square miles in parts of five counties in southern New Mexico. It is the largest military installation in the U.S.
The LocataNet truth reference system can also provide a 2D solution to support ground-vehicle testing. Reportedly, the 2D solution, while also very good, has not yet been fully characterized. Once the filter has been fully tuned in this respect, White Sands could serve as a test facility for autonomous driving. It has many miles of paved highway, possibly in the hundreds of miles.
The importance and uniqueness of White Sands as GPS test facility springs from the fact that it is illegal to jam GPS elsewhere without a special permit, making it extremely difficult to create a real-world test scenario to see how GPS and other PNT devices perform under denied or restricted circumstances. This is of critical importance for flight testing (UAVs and other avionics) for which the UHARS was primarily designed and optimized.
Ligado study flawed, says NovAtel
Method shows lack of understanding of GPS uses
NovAtel Inc. has submitted comments to the Federal Communications Commission (FCC) regarding Ligado Networks LLC’s (formerly LightSquared) License Modification Applications.
NovAtel raises deep concerns about the testing methodology used and conclusions presented by Ligado regarding the impact of its proposed usage of L-band frequencies for a terrestrial wireless network.
In its filing, NovAtel identified serious flaws in the testing methodology used to evaluate high-precision receivers. Although high-precision receivers were used during the testing, the high-precision position modes that are used to achieve centimeter-level positioning accuracy required by many professional and safety-critical applications were not evaluated.
The study shows a lack of understanding of the uses of the GPS by assuming that all applications require the same positioning accuracy, NovAtel said.
The filing also raises a number of concerns about the potential harmful interference impact on GPS receiver performance. NovAtel is particularly concerned that Ligado has moved away from what it understood to be an agreed-upon standard that interference tolerance should be limited to a received interference signal power level that causes no more than 1-dB degradation in the received C/N0 level.
NovAtel disagrees with the conclusion in the RAA Study that there is no meaningful correlation between a 1-dB change and GPS performance. NovAtel submits any interference must not exceed 1-dB degradation in received C/N0 if robust, precise positioning is to be maintained. Ligado has not yet proven that its use of the spectrum will not be detrimental to high-precision GNSS users, which is what the 1-dB C/N0 degradation metric ensures.
“To date, Ligado has not proven that its use of the proposed spectrum can be made compatible with high-precision GNSS,” NovAtel said in a press release. “The interference impact on the other GNSS constellations such as Galileo, GLONASS and BeiDou has not been addressed. These constellations are increasingly used in combination with GPS for many high-precision applications. Proposed, unverified mitigation methods such as narrowband antennas are presented in the Ligado filing without explanation of who will be responsible for the cost of such design modifications and retrofit programs.”
Galileo reaches teendom
Europe’s 13th and 14th Galileo satellites lifted off at 08:48 GMT from Europe’s Spaceport in French Guiana atop a Soyuz launcher. (Photo: ESA)
The Galileo constellation system now has 14 satellites in orbit after a May 24 double launch. Birds 13 and 14 lifted off together at 08:48 GMT (10:48 CEST, 05:48 local time) atop a Soyuz rocket from French Guiana. The twin Galileos were deployed into orbit close to 23,522 km altitude, inclined 57.394 degrees to the equator, 3 hours and 48 minutes after liftoff. Following days saw a careful sequence of orbital fine-tuning to bring them to their final working orbit, followed by a testing phase so that they can join the working constellation later this year.
Marconi Prize awarded to Brad Parkinson
The Marconi Society awarded its 2016 Marconi Prize to Bradford Parkinson. The annual prize recognizes major advances in information and communication science that benefit humanity: in this case, the difficult yet ultimately successful development of GPS. See gpsworld.com/marconi for details and a brief history.
Locatalite transceiver installation in the White Sands Missile Range Ultra High-Accuracy Reference System, provided by the U.S. Air Force for testing equipment under conditions of GPS jamming.
A new dimension in real-world PNT testing has arrived. One of the most critical things to predict for chips, receivers and devices using alternative or back-up PNT technologies is how they will actually perform without GPS.
Filling this need, the U.S. Air Force 746th Test Squadron has declared Initial Operational Capability (IOC) for its new truth reference, the Ultra High-Accuracy Reference System (UHARS) at the White Sands Missile Range in New Mexico. Even when GPS — or any other GNSS system — is being completely jammed, UHARS provides extremely accurate positioning, navigation and time (PNT) over the large area that the system was designed to cover.
“Initial testing shows that UHARS delivers accurate independent PNT as good as, or better than, the Air Force’s current Central Inertial and GPS Test Facility (CIGTF) Reference System (CRS), so it is perfectly able to support current customer requirements,” said Dr. Jim Brewer, Chief Scientist of the 746th Test Squadron. “However, more data are required to tune the UHARS filter and optimize its accuracy to meet even tighter PNT requirements, which is our objective. When this is achieved, UHARS will deliver truth accuracy for next-generation military capabilities, and we will declare UHARS Full Operational Capability.”
“UHARS is a rack-mounted, tightly integrated system of improved navigation sensors, a data acquisition system (DAS) and a new post-mission Kalman filter, all of which need to work together,” explained John Cao, Technical Director of the 746th Test Squadron. “It’s working very well, but once we completely measure and characterize the individual components and then tune and validate the filter, the complete system will provide a significantly more accurate reference solution for future airborne and land-based test vehicles in navigation warfare environments where modernized and legacy GPS signals are jammed from friendly or hostile systems.”
To achieve these accurate reference solutions, UHARS requires a core Non-GPS Based Positioning System (NGBPS) component capable of operating and providing sub-meter position accuracy in a GPS-denied (jamming) environment. The NGBPS subsystem of the UHARS program employs a network of ground-based LocataLite transceivers and test vehicle receivers manufactured by the Locata Corporation. The Locata network deliver centimeter-level positioning and navigation as well as nanosecond-level synchronization, which may be useful for military applications requiring precise time transfer in GPS-denied environments.
White Sands Missile Range (WSMR) is a United States Army rocket range of almost 3,200 sq mi (8,300 sq km) in parts of five counties in southern New Mexico. It is the largest military installation in the United States.
The importance and uniqueness of the WSMR as GPS test facility spring from the fact that it is illegal to jam GPS elsewhere without a special permit. Thus it is extremely difficult to create a real-world test scenario for various GPS and other PNT devices, to see how they perform under denied or restricted circumstances. This is of critical importance for flight testing (UAVs and other avionics) for which the UHARS was primarily designed and optimized.
The LocataNet truth reference system can also provide a 2D solution to support ground vehicle testing. Reportedly, the 2D solution, while also very good, has not yet been fully characterized. Once the filter has been fully tuned in this respect, WSMR could serve as a test facility for autonomous driving. There are many miles of paved highway on the WSMR, possibly in the hundreds of miles.
History of UHARS Development. Based on successful results of the original technical demonstration at WSMR in a real-world end-to-end environment, the USAF proceeded to the NGBPS production and fielding phase in 2012. The Locata Corporation was contracted to provide production ground transceivers and receivers, navigation algorithms required for data analysis and subject matter expertise. The TMC Design Corporation, the integrating contractor for this program, was tasked to develop the production hardware to house the Locata hardware, develop the command and control hardware and software, and field the production hardware at WSMR. The Locata network was fielded in September 2014, and its NGBPS capability is now core to the UHARS that is replacing the CRS.
“Our team is thrilled to be part of this historic USAF capability,” said Nunzio Gambale, CEO and co-founder of Locata Corporation. “Locata products developed and fielded by important commercial partners like Hexagon and Perrone Robotics routinely prove our technology is a game-changer for positioning over industrial-sized areas. However, leveraging Locata technology as the core non-GPS-based PNT solution over a vast military area when GPS is jammed instantly elevates our achievements into a completely new league. Clearly, we are witnessing the arrival of one of the most important technology developments for the future of the entire PNT industry.”
Customers wishing to leverage UHARS into their test programs should contact the 746th Test Squadron at (575) 679-2123 or [email protected] for scheduling information.
The U.S. Air Force 746th Test Squadron has declared Initial Operational Capability (IOC) for its new truth reference, the Ultra High-Accuracy Reference System (UHARS), which employs LocataLite transceivers.
Even when GPS is being completely jammed, UHARS provides extremely accurate positioning, navigation and time (PNT) over the large area of White Sands Missile Range (WSMR) in New Mexico that the system was designed to cover.
To achieve these accurate reference solutions, UHARS requires a core Non-GPS Based Positioning System (NGBPS) component capable of operating and providing sub-meter position accuracy in a GPS-denied (jamming) environment. The NGBPS subsystem of the UHARS program employs a network of ground-based LocataLite transceivers and test vehicle receivers manufactured by the Locata Corporation.
An artist’s concept of a GPS IIR-M satellite in orbit (courtesy of Lockheed Martin).
For more than 41 years, many of us who were there in the beginning have been discussing the attributes, capabilities, enabling features and shortcomings of GPS and other space-based PNT (position, navigation and timing) systems. You have likely heard most of them; historically they go something like this:
The signal is weak.
The signal is easily jammed.
The signal can be spoofed.
The signal is subject to atmospheric perturbations.
The signal doesn’t penetrate buildings.
The signal doesn’t penetrate dense canopies (urban or natural).
I am sure you have heard most of these. Now, allow me to update the situation with some of the developments enabled by modern signals, new techniques, and multi-frequency, multi-GNSS (Global Navigation Satellite System) “all-in-view” receivers. All of the above bulleted statements are still true, but to a lesser extent, virtually each day. As some well-known pop musicians once sang, “It’s getting better all the time.”
Today, multi-GNSS signals in a fully modern multi-GNSS receiver can to some degree resist interference — intentional (jamming) or unintentional — and spoofing. It is extremely difficult for a jammer or spoofer to disrupt GPS, GLONASS, Galileo and BeiDou all at the same time. And more help is on the way.
Today, multi-GNSS signal corrections remove a large amount of error due to atmospheric perturbations and can sometimes deliver centimeter and millimeter accuracy in real time (in the case of short-baseline real-time kinematic (RTK) using only L1 carrier-phase as data, and/or in some other special situations.)
Today, multi-GNSS signals and augmentation signals show some improvement in penetrating dense canopies and canyons by virtue of their multiplied numbers and dispersed geometry.
Today, new ground-based technologies show promise at penetrating buildings to provide indoor location. When combined with GPS/GNSS, this is starting to get us closer to the Holy Grail, the ubiquitous PNT solution.
Debate
The future looks bright for PNT solutions, ground and space-based. I know it all sounds like a debating society, and you may have heard some of these arguments before. My point, my premise if you will, or bottom-line-upfront in military parlance, being: the GPS (space-based) limitations of the past are gradually giving way to the improved multi-GNSS capabilities of today and the combined ground-based and space-based PNT technologies of the present and rapidly arriving future.
Unfortunately, there are many uninformed so-called PNT pundits who love to posture for the press — and who are living in the past. The future is right in front of them, or in many cases in their hands, and they cannot or will not acknowledge its existence.
It’s all in the numbers
Current estimates are that more than 4 billion users depend on PNT daily for position, navigation and timing, or the multitude of services each of these resources enables. More than half of that number is attributable to smartphone users, which means, at a minimum, more than 2 million PNT users have a two-way communications device incorporated into their PNT receiver/sensor.
Let’s look at current high-end smartphones as examples of commercial multi-frequency, multi-GNSS “all signals available” devices. The user has a true multi-GNSS device incorporating:
GPS — Global Positioning System, United States government
GLONASS — Globalnaya Navigazionnaya Sputnikovaya Sistema, the Russian space-based PNT system
BeiDou — the Chinese BeiDou Navigation Satellite System, a regional system now, soon to be global (2020 the advertised date).
with augmentations such as
WAAS — U.S. Wide Area Augmentation System
EGNOS — European Geostationary Navigation Overlay Service
Other SBAS — additional Satellite-Based Augmentation System signals by region
Wi-Fi — Signals compatible with a set of broadband wireless networking standards.
The latest high-end smartphones incorporate an inertial system, a digital compass, a rate gyro, and a pressure sensor integrated with pedometer software that keep track of position, heading and velocity when external signals are lost. Add cellular tower and network-enabled positioning and timing technology, and you have a two-way communications and PNT-based multi-GNSS sensor that, as long as it has power, is never lost.
Atomic numbers
The rubidium-based (atomic-reference system) timing signals from GPS satellite vehicles (SV) are among the most stable timing frequencies ever broadcast from space. The true accuracy of the signal in space is classified, but approaches an accuracy 10 times better than what was once thought to be adequate for our warfighters.
The best clocks in any current GNSS system are the passive hydrogen masers of Galileo. Thus a PNT set-up that adds Galileo to GPS improves in more ways than one.
Ephemeris numbers
Twenty-five years ago, the U.S. military kept track of GPS satellite orbit locations (known as the ephemeris of the satellite) using actual GPS measurements at the control segment tracking stations. The GPS satellite ephemeris was known to a much lesser degree of accuracy than now. At the time, that accuracy was considered good enough.
Today, the ephemeris is known much more precisely, and this can be on the order of some centimeters. This has to do with not only the location of the satellite’s center of mass (c.o.m.), but the actual location from which the signal is broadcast. The position of the satellite’s broadcast antenna is known reasonably well most of the time, by very high-end users, after correcting for the arm lever between the c.o.m. and the antenna phase center. The c.o.m. itself can vary by some centimeters over time because of depletion of onboard expendables, but here we are getting into very high-order minutiae.
Suffice it to say that certain multi-GNSS scientific high-precision receivers today are used to measure tectonic movements on the order of centimeters over the course of a full year.
Number of signals
Just recently, with the addition of certain QZSS signals (the Japanese Quasi-Zenith Satellite System) along with the Indian (GAGAN) and Russian (SDCM) equivalents of WAAS and EGNOS, the number of multi-GNSS PNT signals available to a truly international multi-GNSS receiver exceeds 200. For example, one set of global commercial receivers routinely receive and process more than 190 PNT signals in a six-hour period. The receivers are both static and dynamic, and they are networked. The static receivers know their actual location to within millimeters, and use this location as a truth set from which all other signal data is compared.
Accuracy numbers
For our example (and all parameters are software-defined and user-programmable), the location parameter may be set at 10 centimeters, meaning that any position derived from PNT signals or augmentations that differ by more than 10 centimeters from the “truth set” are immediately rejected, and that data is broadcast on the systems network, which keeps the dynamic receivers in sync as well.
The individual receivers each contribute to their own and a networked website with metadata usable by Kalman filters to which other users may choose to subscribe. This makes the multi-GNSS receivers not only receivers, but system and PNT monitors and sensors that can detect jamming, interference and spoofing attempts, which are reported.
This monitoring and tracking system is constantly evolving and incorporating new technologies while becoming more secure everyday. This is not a totally new concept, as the core system is a mature enterprise system that has been in operation and commercially viable for more than seven years.
This should be comforting information for those of you who stay up at night worrying about the safety of autonomous vehicles on land, sea and in the air.
Don’t let me give you the impression that GPS is just waiting around for other GNSS to come to its aid. GPS is aggressively modernizing itself. In Air Force parlance, “GPS III space vehicles will introduce new capabilities to meet higher demands of both military and civilian users.” As stated by GPS III contractor Lockheed Martin, the modernized system will:
• Deliver signals three times more accurate than current GPS spacecraft.
• Provide military users up to eight times improved anti-jamming capabilities.
Augmentations and improvements
The bottom line is that a greatly increased number of space-based PNT platforms — along with quantum improvements in computing power, cheap non-volatile memory and software-defined capabilities — have produced a multi-GNSS PNT capability that increases availability via sheer numbers, with more security and reliability on the way.
A pair of LocataLite transmit antennas overlook a section of the White Sands Missile Range blanketed by the Locata high-precision ground-based positioning system.
We are rapidly developing a PNT system that goes far in countering the naysayers. It takes advantage of augmentations and complimentary systems such as newer versions of Loran, (Long-Range Navigation System) and local PNT implementations such as Locata, just to name a couple of examples.
These ground-based systems are critical to the future of PNT, and have very strong signals. For instance, eLoran is extremely difficult to jam, if not actually unjammable. If a monstrous sunspot were to temporarily knock out the majority of space-based systems, the ground-based systems would more than likely still be available, if — big if here — they are fully developed. At the moment, this is not a sure thing. It is a work in progress.
Ground-based augmentations and complimentary/backup systems can in the future add a level of security for GPS and other space-based PNT systems: Why bother trying to knock out these space-based systems when there is a suitable and readily available ground-based system as a backup?
The U.S. government maintains a number of monitor stations around the globe. However, it has not historically taken advantage of the incredible capabilities of multi-GNSS receivers and sensor technology. Although NASA and other U.S. non-military agencies have been involved with multi-GNSS — specifically the Russian GLONASS — for the past 20 years or so, the use has not been widespread. Fortunately, recent changes now permit multi-GNSS receivers for government users, including the military, in certain non-targeting activities, and the government would do well to take advantage of the changes. The good news is that the majority of the capability is in the receiver design, a capability on which the current director of the GPS Directorate at the Space and Missile Systems Center (SMC) “made his bones.”
To all those critics who take every opportunity to denigrate space-based PNT, both inside and outside the government, I say: Pay attention to multi-GNSS. Stop your diatribes, because the future is arriving. Secure space-based PNT systems are here to stay.
They continue to improve and become more secure as they incorporate space- and ground-based augmentations, new PNT technologies, software-defined capabilities, multi-GNSS signals, and enhanced computing. “It’s getting better all the time.”
Allow me to repeat myself all over again. Space-based PNT is here to stay.
Until next time, happy navigating, and remember: GPS is brought to you free of charge by the United States Air Force.
Wide-Area Wireless Network Synchronization with LocataNets
The United States Naval Observatory conducted several independent frequency synchronization experiments in Washington, D.C., using an alternative PNT technology in multiple network configurations. The results suggest that sub-nanosecond time transfer using this technology may be possible over wide urban areas, and that it could thus serve as a GPS augmentation or back-up solution over wide areas for critical applications that depend on precise time.
By Edward Powers and Arnold Colina
Because of the great responsibility of being the prime source of time for many critical national systems, the United States Naval Observatory’s (USNO’s) clock system must be at least one step ahead of the demands expected to be made on its accuracy. Therefore, innovative methods of transferring precise time and frequency must continually be anticipated, investigated and supported.
The USNO has developed one of the world’s most accurate and precise atomic clock systems, used by many systems requiring highly precise time. The USNO operates the U.S. Master Clock, which provides the precise time source for the GPS satellite constellation run by the Air Force; it is also the time standard for the U.S. Department of Defense. Along with its sister organization, the National Institute of Standards and Technology (NIST), it provides the official time for the entire nation.
To investigate new precise time transfer methods, the USNO desired to independently test Locata’s TimeLoc methodology as a possible technology for maintaining precise frequency synchronization across an urban or wide-area network — the foundation for supporting precise time transfer.
Internet of Everything Ups Timing Requirements
Many critical modern systems such as 4G mobile phone networks, banking, and electricity grids demand high-accuracy time and frequency stability across specified areas. Precise network synchronization is critical for nearly all digital networks, and more stringent network stability requirements are expected to emerge as the user base for these applications continues to grow. To date, the preferred method to achieve this performance is via synchronization from GPS. However, the vulnerability of GPS signals causes growing concern among industry experts. Many actively seek alternative means of precise time transfer and frequency stability across wide areas.
Alternative position, navigation, and timing (PNT) technologies such as chip scale atomic clocks (CSAC), precision time protocol (PTP), and enhanced long range radio navigation (eLoran) are proposed or operational today, with each serving different markets.
Meanwhile, timing needs for wireless protocols continue to increase with the proliferation of mobile phones and other wireless communication devices. To accommodate a booming user base, wireless spectrum must be carefully managed to improve bandwidth and channel efficiency. Wireless communication performance is fundamentally dependent upon precise time and frequency, so improvements in highly accurate timekeeping methods will permit better spectrum utilization, which in turn permits more users and more bandwidth per user.
Clearly, synchronization is a core enabling technology for modern digital systems, both for radiopositioning and the world’s telecommunications highways. But synchronization is taken for granted because, when it works well, it is effectively invisible. Without it, however, everything is likely to fall apart.
Synchronization will become even more crucial for the next generation of digital systems. A recent paper by the U.S. National Institute of Standards and Technology (NIST) states that we stand at the advent of a revolutionary new economy fueled by a global Internet of Everything (IoE), in which 37 billion new things will be connected to the Internet by 2020.
This NIST paper adds that “One fundamental enabler of this revolution will be the marriage of timing signals and data that breaks through the existing barriers. Timing is critical for future development and improvements.”
Improved wireless synchronization has proved very challenging to realize, as the timer in each network node is derived from an independent oscillator that is affected by long/short term frequency drifts and jitter. Many alternative timekeeping methods present serious limitations in terms of precision or network size.
Encouraged by earlier published results showing that Locata Corporation’s radio-based PNT technology enables network synchronization at the nanosecond level, and suggesting that it could perform comparably across large urban areas, the United States Naval Observatory (USNO) conducted its own synchronization experiments on Locata technology.
Real-World Challenges
The USNO campus is situated about 4 kilometers northwest of the White House in Washington, D.C. The grassy tree-lined campus is, unfortunately, a relatively small area for testing wide-area synchronization capabilities. It became apparent that realistic long-distance tests would necessitate extending the LocataNet outside USNO boundaries. This meant coordinating access to other facilities in theWashington, D.C., area to allow remote housing of LocataLites and their antennas. As many researchers will confirm: when real-world testing requires access to multiple external sites and their disparate administrations, the coordination required to keep everything on track can quickly become the most daunting challenge of the exercise. We needed to find cooperative facilities, preferably with line-of-sight (LOS) to the USNO and its Master Clock in order to establish the best TimeLoc link between facilities. As we also wanted to exercise TimeLoc’s ability to cascade its synchronization through multiple LocataLites, ever more D.C. facilities would need to be involved. Predictably, it transpired that not many facility managers in the Washington district were eager to help the USNO broadcast and receive new and unknown signals in or around their government buildings! And those who were amenable to support the demonstration either lacked a LOS, or were not willing to assist without considerable monetary compensation.
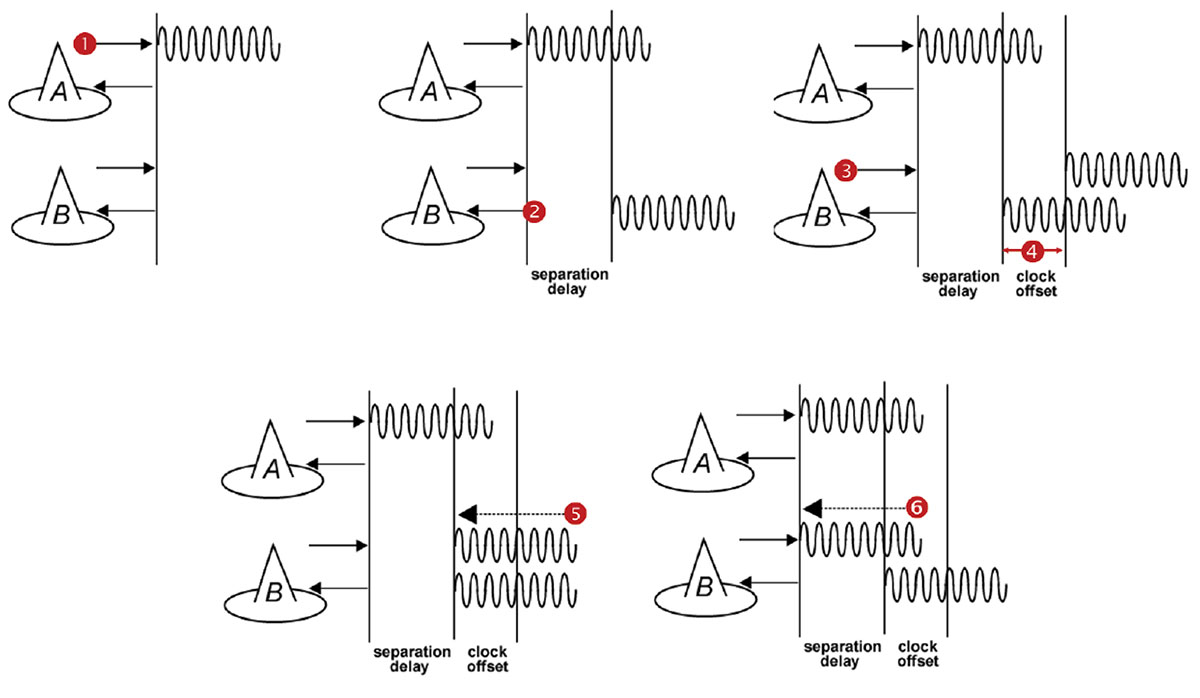
Step 1: LocataLite A transmits a unique signal (code and carrier). Step 2: LocataLite B acquires, tracks and measures the signal generated by A. Step 3: LocataLite B generates its own unique signal (code and carrier) which is transmitted in the normal manner. Importantly, the transmitted signal is received by the receiver section of LocataLite B as well. Step 4: LocataLite B calculates the difference between the signal received from LocataLite A and its own locally generated and received unique signal. Ignoring propagation errors, the differences between the two signals are due to the difference in the clocks between the two devices, and the geometric separation between them. Step 5: LocataLite B adjusts its local oscillator to bring the differences between its own signal and LocataLite A’s received signal to zero. The signal differences are continually monitored and adjusted so that they remain zero. In other words, the local oscillator of B follows precisely that of A. Step 6: The system corrects for the geometrical offset (range) between LocataLite A and B, using the known coordinates of the LocataLites’ antennas. When this step is accomplished, TimeLoc has been achieved.
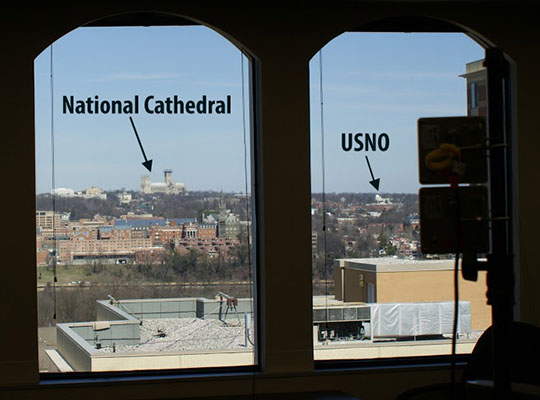
After months of attempts to secure appropriate partners for this demonstration, we finally found some supporters in the shape of the Federal Aviation Administration Building in Rosslyn, Va., and the National Cathedral in Washington, D.C. Regrettably, it turned out that these facilities were not going to be available at the same time! Logistic challenges never end. This scheduling reality necessitated spreading the TimeLoc demonstration over several months in three different blocks of trials. Nevertheless, we were eventually able to devise a plan which leveraged access to the USNO and still accommodated the timetables of the supporting external facilities.
A series of experiments were planned to measure and evaluate the stability between master and slave LocataLite 1-pulse per second (PPS) signals in several urban LocataNet configurations. Many of the trials were specifically designed to measure TimeLoc’s ability to cascade multiple times through multiple LocataLites, exercising the technology’s capabilities over increasing distances and hence correspondingly larger notional coverage areas.
Figure 2. LocataLites under test at USNO.
Locata signals were broadcast in the Industrial, Scientific and Medical (ISM) 2.4 GHz radio band, commonly known as the Wi-Fi band, with a total radiated power of 200–500 mW. LocataLites and their respective antennas were installed at locations that permitted LOS between units, according to whichever specific LocataNet configuration was being evaluated at the time. In each configuration, the master LocataLite, designated as LocataLite 1, was synchronized to the USNO Master Clock so that the Master Clock’s time would be propagated through the LocataNet. Both the master and slave LocataLite 1PPS signals were collected into a time interval counter and the time difference between their rising edges was measured.
When tracking radio frequency signals over a significant distance, tropospheric delay becomes an important error source for measurements used in timing solutions. The speed of light can only be assumed to be universally constant in a vacuum, so atmospheric temperature, pressure and humidity materially changes the speed of light when propagating through air. In fact, using standard atmospheric parameters, the unmodeled tropospheric delay is surprisingly large — approximately 280 parts per million (ppm), which equates to slowing down almost one nanosecond over each kilometer of radio transmission. Obviously, as transmission distances increase, tropospheric error becomes a substantial factor which must be accounted for in hyper-accurate timing systems. Devising methodologies that effectively mitigate large tropospheric errors becomes essential.
To help solve this problem, Locata developed new tropospheric models that use relatively inexpensive meteorological (MET) stations which measure temperature, pressure and relative humidity at the LocataLite sites. This modeling alone is able to mitigate the tropospheric effects to within just few parts per million. This proved to be an essential feature, as the weather during the course of the entire months-long testing campaign varied significantly among the separate trials.
The TimeLoc Process
LocataNets function as local ground-based replicas of the satellite-based GPS position and timing networks. A LocataNet can be designed and configured by the user to deliver a powerful, local, controllable, tailored signal as required by different applications.
The easiest LocataNet layout to describe is a hub-and-spoke model consisting of a single master LocataLite transceiver and one or more slave LocataLites. More complex network configurations have been deployed in many commercial systems in use today. The patented process by which slaves are synchronized to the master (or other slaves) is known as TimeLoc.
In 2013, a University of New South Wales team demonstrated that Locata’s radio-based TimeLoc technology provided accurate time transfer (~5 ns) and frequency stability (~1 ppb) across a large distance of 73 kilometers (45.4 miles). This significantly outperforms GPS for wireless time transfer. Given this demonstrated radius of transmission in a rudimentary configuration, Locata was shown as being able to supply nanosecond-accurate time to a 146 km diameter circle, which would cover 16,750 km2 — almost 200 times the size of Manhattan. Ranges greater than this can be deployed if required for safety-of-life, military or government-mandated systems.
As TimeLoc is accomplished without the use of atomic clocks, this represents a new level in precision network synchronization of this scale. It could conceivably serve as a GPS augmentation or back-up solution over wide areas for critical applications that depend on precise time.
Since Locata technology was originally developed as a high-accuracy non-GPS-based positioning and navigation solution, the time synchronization accuracy requirements for a LocataLite transceiver are very high. If sub-centimeter positioning precision is desired for a Locata receiver, every smallest fraction of a second is significant; for example, a 1-nanosecond error in time equates to an error of approximately 30 centimeters.
TimeLoc wireless synchronization enables LocataLites to achieve high levels of synchronization without atomic clocks, without external control cables, without differential corrections, and without a master reference receiver.
In theory, there is no limit to the number of LocataLites that can be synchronized together. TimeLoc allows a LocataNet to propagate into difficult environments or over wide areas. For example, if a third LocataLite C can only receive the signals from B (and not A) then it can use these signals from B for time synchronization instead. The only requirement for establishing a LocataNet using TimeLoc is that LocataLites must receive signals from one other LocataLite. This does not have to be the same central or master LocataLite, since this may not be possible in difficult environments with obstructions, or when propagating the LocataNet over wide areas.
This method of cascading TimeLoc through intermediate LocataLites has been proven in a growing number of real-world operational LocataNets, including a network in use today by the U.S. Air Force which is configured to cover up to 2,500 square miles (6,500 square kilometers) of the White Sands Missile Range in New Mexico.
In large networks where extremely high synchronization accuracies are required, it is useful to incorporate a meteorological sensor at each LocataLite to monitor the change in weather over considerable distances. This is certainly the case for long-range systems such as the USAF LocataNet installed at the huge White Sands Missile Range, where distances of over 50 km can be found between LocataLites. However, for the purposes of these USNO Washington experiments, where the longest point-to-point transmission distance was 2.9 km, it was assumed that weather parameters would be virtually identical at all LocataLite locations. Therefore only one MET station was employed within the entire network, which for these trials was collocated with the master LocataLite.
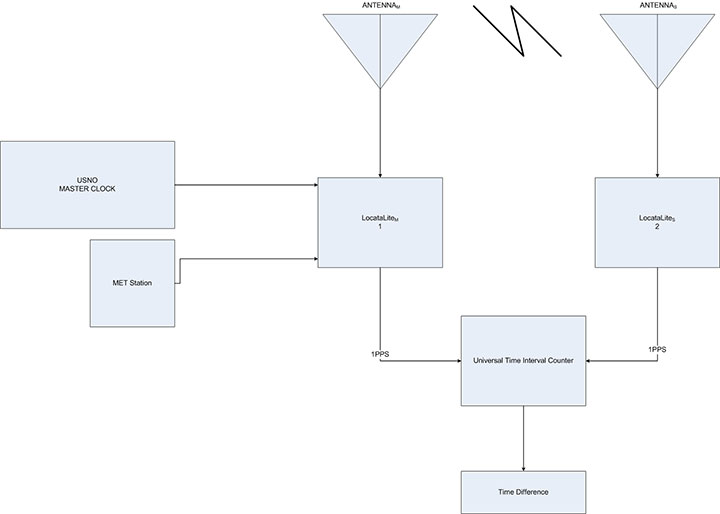
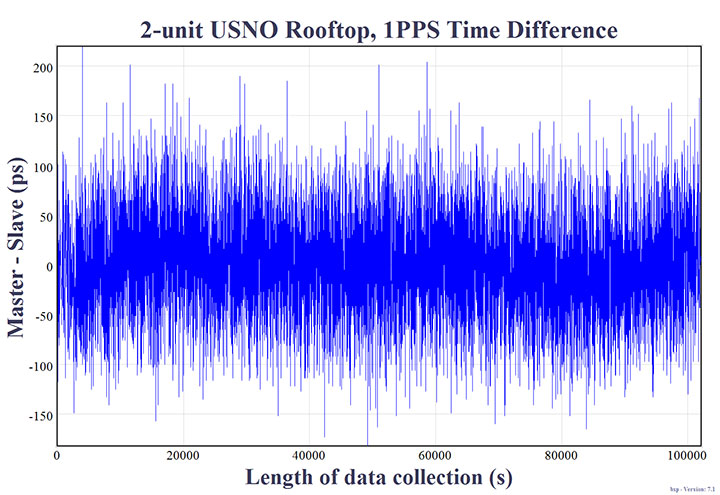
The very first experiment conducted by the USNO to gain some familiarization with TimeLoc was run entirely within the grounds of the USNO campus. It employed two LocataLites with their respective antennas on the roof of USNO Building 78. In this initial configuration the antennas were positioned 15.24 m apart. It was intended to use the measured result as a baseline against which TimeLoc synchronization over longer distance could be compared. This first arrangement is referred to as the two-node setup. A diagram of this configuration is shown in Figure 3.
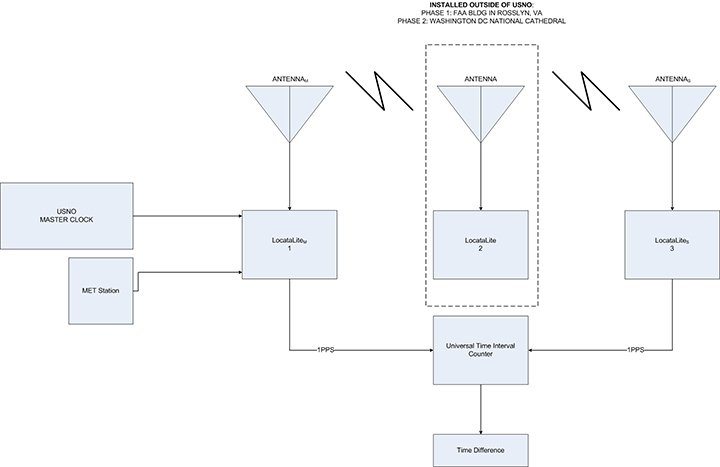
Second and third experiments demonstrated Locata’s ability to cascade the master 1PPS signal to an intermediary slave LocataLite, which in turn transmits a signal to which a third LocataLite can TimeLoc. This LocataNet configuration is referred to as the three-node setup (Figure 4).
Figure 4. Three-node setup (total range: 5.794 km/3.6 mi and 2.401 km/1.49 mi).
This experiment was conducted twice using two different intermediate LocataLite locations. The first intermediate location was indoors on the top floor of the FAA Building in Rosslyn, Va. (Figure 5). The distance between the master/slave antennas to the intermediate antenna in the FAA building was 2.897 km, but since the signal was propagated through a tinted window, the received signal strength inside the building was greatly attenuated, effectively simulating a much longer transmission distance. The second intermediate (LocataLite 2) location was from the balcony of the National Cathedral’s Ringing Chamber. In this case the distance between USNO LocataLite 1 master/slave to the intermediate antenna in the National Cathedral was approximately 1.183 km.
Figure 5. Intermediate LocataLite 2 antennas inside FAA building. In the distance, both the USNO and the National Cathedral are visible.
In both cases in Figure 4, the distance between master and terminal slave antennas was 3.048 m on the USNO building, but they were intentionally not TimeLoc’d to each other. The timing signal was therefore forced to route through the intermediate LocataLite 2 at either the FAA Building or the National Cathedral.
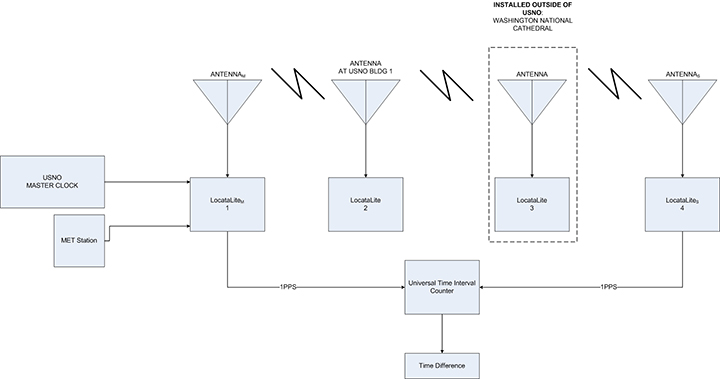
A fourth experiment included yet another intermediate cascade where the TimeLoc signal was transmitted from the second to a third LocataLite/antenna before arriving at the fourth LocataLite in the chain. This LocataNet configuration is referred to as the four-node setup. A diagram of the setup is shown in Figure 6, and it now added a LocataLite on USNO Building 1 to expand the set-up, along with the intermediate LocataLite installed at the National Cathedral (Figure 7).
Figure 6. Four-node setup (total range: 2.413 km/1.5 mi).Figure 7. LocataLite antennas outside the Ringing Chamber of the National Cathedral Spire.
Referring to Figure 6, the distance between the master LocataLite (antenna 1) at USNO Building 78 and the LocataLite (antenna 2) at USNO Building 1 was approximately 42.672 m. The distance between the USNO Building 1 (antenna 2) to the Washington National Cathedral (antenna 3), was approximately 1.144 km. The distance between the Washington National Cathedral (antenna 3) back to antenna 4 on USNO Building 78 was approximately 1.183 km. The total range in this four-node chain was 2.413 km. In this configuration, LocataLites 1 and 4 are intentionally not TimeLoc’d to each other, forcing the 1PPS signal to be routed through LocataLites 2 and 3.
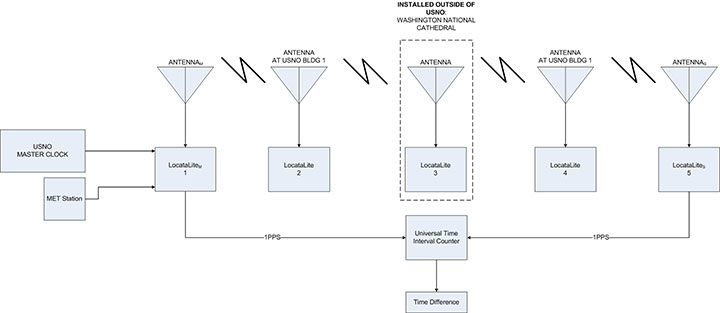
A fifth experiment included yet one more LocataLite and antenna at USNO Building 1 (Figure 9), totaling cascaded TimeLoc among five LocataLites and their respective antennas: the five-node setup, shown in Figure 8. In this configuration LocataLites 1 and 5 are intentionally not TimeLoc’d to each other, forcing the 1PPS signal to be routed through LocataLites 2, 3 and 4.
Figure 8. Five-node setup (total range: 2.427 km/1.51 mi).Figure 9. LocataLite antennas on USNO Building 1. National Cathedral in background.
Measurement Methodology
A measurement of time difference between master and slave LocataLite 1PPS readings was done using a Stanford SR620 universal time interval counter. The rising edge of the 1PPS signals were inspected at 1-Volt trigger level. A 10 MHz reference was provided to the counter from the USNO’s Master Clock. Channels A and B on the counter were designated to the master and slave 1PPS signals respectively. Data were collected from the counter through serial connection to a PC. The length of each experiment was time-limited in some way because of limited access to facilities, such as the FAA building or National Cathedral. However, a minimum of at least 30,000 seconds (8.33 hours) of data were collected for each test to characterize the overall stability of the 1PPS signals between master and terminal slave LocataLites.
Collected Data
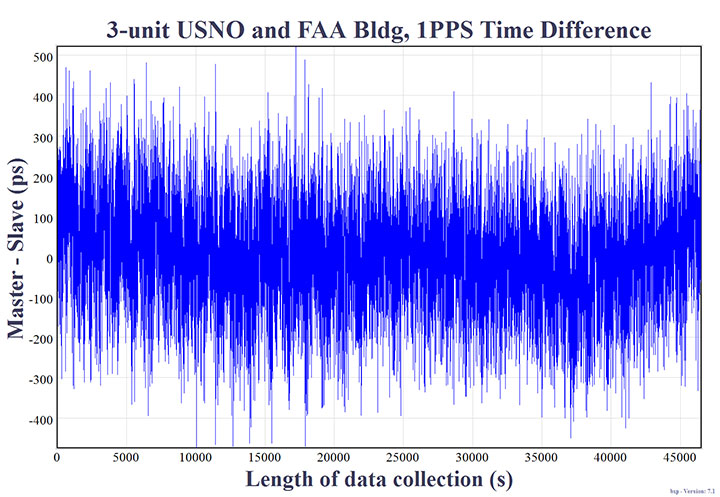
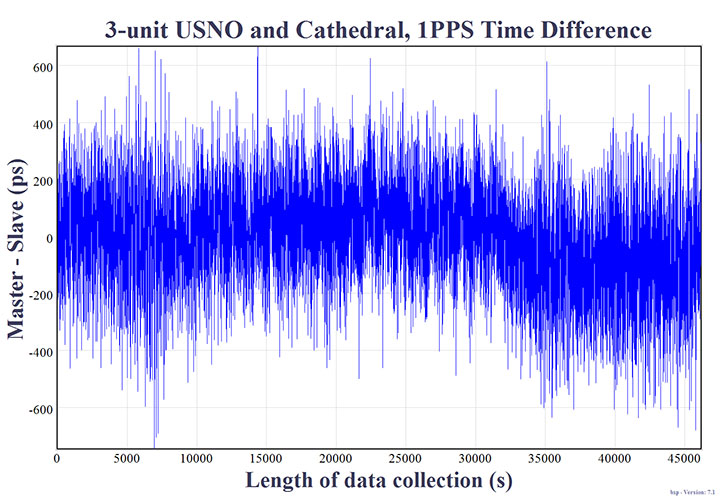
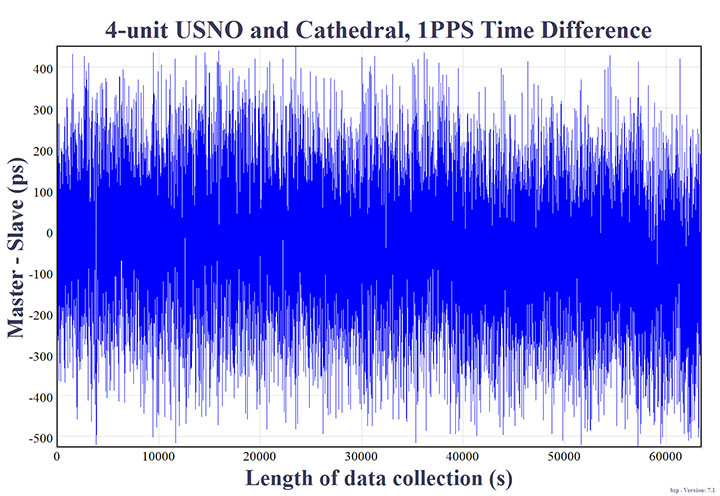
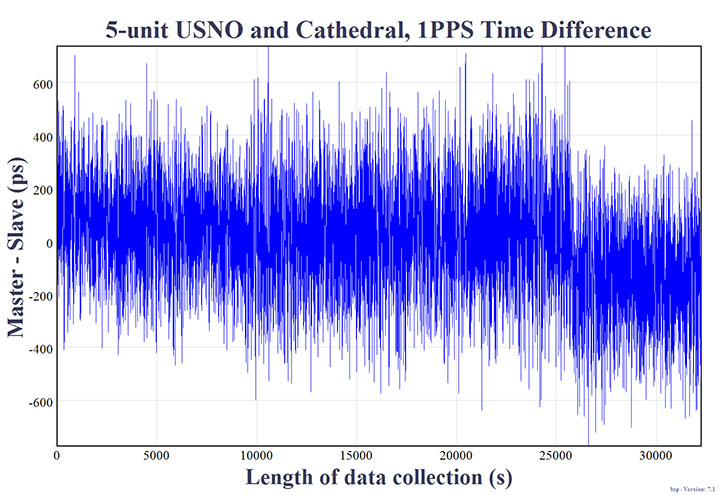
Figures 10 to 14 show the normalized 1PPS time difference between the master LocataLite and the terminal slave LocataLite. Normalization effectively removes errors due to unsurveyed antenna locations and uncorrected cable delays; hence it highlights the frequency coherence of the network.
Figure 10. Two-node setup on USNO rooftop, collected for slightly more than 1 day. Distance: 15.24 m/50 ft. Synchronization Standard Deviation (SSD) = 51.095 picoseconds.Figure 11. Three-node setup at USNO and FAA Building, collected for over 12 hours: 5.794 km/3.6 mi. SSD = 127.333 picoseconds.Figure 12. Three-node setup at USNO National Cathedral, collected for over 12-hours: 2.401 km/1.49 mi. SSD = 171.325 picoseconds.Figure 13. Four-node setup at USNO with cascades at National Cathedral and USNO building 1, collected for over 17-hours: 2.413 km/1.5 mi. SSD = 145.247 picoseconds.Figure 14. Five-node setup with cascades at National Cathedral and 2 hops at USNO building 1, collected for over 8-hours: 2.427 km/1.51 mi. SSD = 197.766 picoseconds.
Results
The results in Table 1 show the 1PPS signal variability for each LocataNet under evaluation. These values represent the frequency coherence between master and terminal slave LocataLite 1PPS signals for each experiment.
Table 1. LocataNet frequency stability.
The two-node setup used two LocataLite antennas located within 15.24m of each other. The measured precision standard deviation was 51.095 picoseconds. This value is a culmination of the total Locata noise budget, which is expected to consist of TimeLoc noise, residual tropospheric error, multipath change (signal scattering/diffusion), PPS generation, and PPS measurement. This two-node result can be used as a baseline for Table 1 measurement results over longer distances. The differences are shown in the last column of Table 1. For example, cascading TimeLoc over the 5.794 km three-node setup introduced an additional deviation of 76.238 picoseconds, compared to the two-node set-up.
The three-node setup tested the effect of adding a TimeLoc cascade wherein the Locata signal from the master is routed to an intermediate LocataLite, and then to the terminal slave. When the master LocataLite signal was cascaded through the intermediate LocataLite at the FAA Building, the configuration showed a standard deviation of 127.333 ps across a total signal path length of 5.794 km. Alternatively, when the master LocataLite signal was cascaded through the intermediate LocataLite at the National Cathedral, that three-node configuration showed a standard deviation of 171.325 ps across a total signal path length of 2.401 km.
Interestingly, it appears that in the two different three-node setups, the intermediate cascade to the FAA building (2.9 km from the master and terminal slave LocataLites) delivered slightly better time transfer performance than the configuration which leveraged the closer (1.183 km) National Cathedral intermediate cascade. We believe this is attributable to the fact that the line-of-sight between USNO Building 78 (the site of the master and terminal slave) and the National Cathedral (the intermediate cascade) was completely obscured by heavy foliage seen in Figure 9, and that this particular configuration required the signal to pass through the foliage twice when being transmitted back and forth. Not only does foliage introduce multipath, but the properties of this foliage also changed regularly according to wind and moisture — two weather attributes that varied significantly over the course of the week in which those particular experiments were set up and run. This theory seems reasonable, since the four-node setup only required the signal to pass through this foliage once, and the recorded performance was better than the three-node setup — despite the fact that an additional TimeLoc cascade point was introduced.
The four-node setup included TimeLoc cascades at USNO Building 1 and the Washington National Cathedral. In this configuration, the data from Table 1 shows a standard deviation of 145.247ps across a total signal path length of 2.413 km.
The five-node setup included yet another TimeLoc cascade between the National Cathedral and Building 1 at USNO before reaching the terminal LocataLite slave. In this configuration, the data from Table 1 shows a standard deviation of 197.766ps across a total signal path length of 2.427 km.
Frequency Stability
Frequency stability is best measured over long periods. Because all of the equipment in the two-node setup was located on USNO premises, it could be run undisturbed for a longer period of time than configurations which required access to external facilities outside of the USNO’s control. Data obtained from the two-node setup were used to calculate the frequency stability between the two TimeLoc’d LocataLites. The length of this data set was 28 hours, 22 minutes, and 40 seconds. During this period, the approximate one-day frequency stability was measured as 1×10-15 (1 part per quadrillion).
To put this measurement into a more practical context: Stratum 1 is defined as a source of frequency with an accuracy of at least 1×10- 11, hence Stratum 1 performance generally originates from an atomic standard. For example, Cesium beam atomic clocks typically provide better performance than this, with one day Allen deviation stabilities in the mid- Ex10-14 (usually stable to between 3×10-14 to 6×10-14). Rubidium clocks are typically never more stable than 1×10-13 and Maser clocks are typically stable to mid-to-low Ex10-15 over one day.
Locata’s link stability — achieved without the use of atomic clocks — is clearly capable of distributing Stratum 1 frequency and precise time without substantially degrading the reference clock stability. This measured performance is significant, because a stable network is an essential prerequisite for precise time and frequency transfer. Moreover, for many traditional timing applications and developing digital and IoE applications, stability is more important than accuracy; just as for most advanced technology applications, frequency is more important than time of day.
Conclusions
The five USNO experiments suggest that the variations of the measured frequency synchronization between master and terminal slave LocataLites were not inevitably attributable to the distance between LocataLites, but rather governed by the number of nodes or cascade points in the LocataNet configuration, and LocataLite signal quality. Each signal cascade through an intermediate LocataLite introduced ~25ps of jitter into the solution.
Additionally, it was noted that transmitting TimeLoc signals across an urban environment did not always allow for unobstructed line-of-sight or completely open-sky environments. For instance, some of the LocataNet configurations required the signal to travel through dense, leafy trees which appeared to slightly affect overall frequency stability. Additionally, one FAA configuration required the signal to travel indoors through a tinted window which ultimately affected received signal strength.
These USNO tests highlighted the capability of the LocataLite as a viable option for a stable 1PPS distribution setup within an urban environment in support of applications like cell tower synchronization in “GPS-challenged” environments. All tested configurations demonstrated frequency synchronization of less than 200 picoseconds. This is significantly better than any other known wireless network synchronization methodology, including GPS. Furthermore, if clear line-of-sight is available between a master and slave LocataLite, the 2-node precision has been shown to be on the order of 50ps, and has one-day stabilities to 1×10-15.
These results, reinforced by those previously reported in University of New South Wales tests over a very large area, suggest that distance between nodes is not a significant factor, provided that sufficient signal quality is maintained. Thus, there are no theoretical or technical problems with scaling LocataNets to very large areas. In fact, this has already been demonstrated at the White Sands Missile Range where the USAF has now deployed a fully-operational Locata network that covers up to 2,500 square miles (6,500 square km), about 80 times the size of Manhattan.
The USNO trials reported here have clearly demonstrated TimeLoc’s relative picosecond-level synchronization of independent Locata networks. If this highly-stable network capability were not in place, precise time transfer would not be possible. The next step is to demonstrate how well a LocataNet can deliver absolute time transfer of the USNO’s Master Clock time to any other network node across similar areas of Washington, D.C.
Acknowledgments
The authors would like to thank James Shepherd of the National Cathedral and Paul Worcester of the FAA for use of their respective buildings. The authors would also like to thank Locata personnel for the use of their equipment and technical assistance in setting up the LocataNets under evaluation.
This article is based on a paper presented at ION GNSS+ 2015.
Disclaimer
Though particular vendor products are mentioned, neither official USNO endorsement nor recommendation of any product is herein implied.
Edward Powers is the GNSS and Network Time Transfer Operations Division Chief at USNO. He also serves as an advisor to the USAF GPS Directorate supporting space atomic clock development, modernized GPS III navigation message design, GPS accuracy improvement studies, and GPS UE development.
Arnold Colina is an electronics engineer in USNO’s GNSS and Network Time Transfer division, tasked with providing accurate UTC reference through GPS and performing calibration tests on GNSS receivers.
Timing Versus Synchronization
“They say “timing is everything” but nowadays it’s probably more correct to say “synchronization is everything”. There is a significant difference, yet many are surprised to learn they are not the same thing.
“Time dependent” applications rely on their clocks being close to the “real time”, as defined by a consensus of super-accurate atomic clocks managed by national bodies like the USNO. Once agreed upon by the labs, this “real time” can be distributed to various “time dependent” networks as a reference time to drive their operations.
“Time synchronized” applications, on the other hand, employ a methodology in which a common network time can be transferred to each network node. In other words, often the real technology enabler is that all the clocks in a defined network are synchronized to each other, even if they all run to what is any arbitrarily defined time-base. The “real time” doesn’t matter as much as how closely the node times agree with each other. As Einstein famously taught us: “Everything is relative.”
For example, accurate synchronization enables GPS positioning to work because a user’s GPS receiver relies on time-of-arrival comparisons from four or more satellites transmitting their signals at the same instant. But — even in this GPS paradigm where atomic clocks are always touted to be the most fundamental of requirements — it is important to appreciate this: A GPS user’s receiver does not care how, or to what “time,” the satellites are made synchronous. The only things the user receiver needs to know is where the satellites are, and that the satellites are synchronized when they transmit their signal.
Unfortunately sustaining high-precision, reliable time synchronization of multiple network nodes is a mammoth engineering task. Just ask the US Air Force! All clocks, no matter how accurate they are, eventually drift, so they cannot remain synchronized without comparison and adjustment.
Given the world’s exploding, insatiable demand for more data transmitted via ever-faster wireless systems, synchronization will become even more important than it is today. More wireless users and more bandwidth per user means that nanosecond — or even picosecond — network synchronization is one of the emerging engineering challenges of the 21st century. There are few resource on earth which are as scarce, or more precious today, than spectrum. So there is no question that better or cheaper ways to greatly improve network frequency and synchronization will translate directly into better use of the world’s exceptionally valuable, extremely limited spectrum resource.
The Inertial+ by OxTS improves measurements from a GPS receiver.
OxTS has successfully integrated a Locata receiver with its Inertial+ to create the first Locata+INS device, according to both companies. The device is capable of achieving centimeter-level accuracy where GPS systems fail.
The Inertial+ series, first developed in 2008, was designed for users who had an external GNSS receiver already, but still wanted to gain the benefits of an inertial system. The company has been able to combine OxTS’ Kalman filter and expertise in GNSS/IMU integration with its existing systems, meaning the user doesn’t have to pay for survey-grade integrated receivers.
Over the years, a number of popular GNSS receivers have been integrated with the Inertial+ to keep up to date with the market and make sure customers with the latest models can take advantage of the benefits the Inertial+ brings, OxTS said. Now, the Inertial+ has expanded from GNSS receivers and become the first inertial navigation system to integrate a Locata receiver, combining the many benefits of both systems, the companies said.
Locata is an innovative positioning system designed to complement rather than replace GPS, by addressing the issues and shortfalls of GNSS. As always, the Inertial+ allows Locata users to take advantage of their existing technology while enjoying the extra layer of measurements an aided-inertial navigation system brings.
Locata enables positioning in environments where GPS is either marginal or unavailable. Instead of using signals from satellites, a network of ground-based Locata transmitters (known as a LocataNet) can be set up around any specified local area. The LocataNet transmits GPS-like signals that allow any Locata receiver in the network to accurately calculate its position and time. Unlike GPS, where signals are too weak to penetrate into buildings, Locata’s signals are very powerful — more than one million times more powerful than GPS.
Additionally, with a locally based system (rather than a global satellite system), a user gains the benefit of having total control over both the reliability and quality of positioning solutions within the LocataNet coverage area. Locata systems are being sold today in many markets where GPS is unusable or unreliable, such as inside warehouses, on dockyards, in open-pit mines, for UAVs in urban areas, and for military uses where GPS is being actively denied by an adversary.
By combining the technologies of an inertial navigation system and a local positioning system, users have access to an extremely reliable and robust navigation solution, the companies said. Locata positioning data is fused with the IMU data in the Inertial+ with OxTS’ custom Kalman filter, creating a full 3D navigation solution with precise position, orientation, heading, velocity and acceleration measurements.
NASA’s Ikhana is being used to test a system that will allow uncrewed aircraft to fly routine operations within the National Airspace System. (Credit: NASA)
NASA plans to install a Locata network (LocataNet) as the core positioning technology for safety-critical unmanned aerial systems (UAS) research at its Langley Research Center in Hampton, Va., according to an announcement by Locata.
NASA Langley is tasked with performing rigorous and repeatable scientific evaluation of new UAS safety and technology concepts under development. The LocataNet will provide high-precision non-GPS-based positioning, navigation and timing (PNT) that is essential for this work. Known for its long history of aeronautics research, NASA Langley is a key center for UAS research and development. In June, one of Langley’s unmanned hexacopters (a drone with six rotors) delivered medical supplies to a clinic, the first such delivery by an unmanned drone.
Locata’s centimeter-accurate positioning will now assist NASA to develop and improve flight-critical technology systems that support air transportation safety, efficiency and performance. Langley’s extensive state-of-the-art facilities will be further enhanced with the installation of the LocataNet.
The NASA LocataNet is scheduled to be installed and commissioned before the end of 2015. Locata will supply the LocataLite Transmitters and Locata receivers required by NASA for the installation. Aviation-quality Locata antennas, developed by Cooper Antennas (UK) and previously used by the U.S. Air Force in its own military LocataNets, will also be installed. Locata engineers will support the physical installation, ongoing training and the future technical support required by NASA Langley for this world-first UAS deployment.
Locata Corporation has invented new terrestrial positioning networks which function as local, ground-based replicas of GPS. These networks can be thought of as “GPS hotspots,” according to the company. Locata has amassed 146 granted patents to date protecting these innovations, with many more patents in the works.
Locata is currently shipping commercial systems to demanding and professional end users such as the USAF, NASA, Leica Geosystems, and many others. Locata enables their integration partners to extend GPS-like positioning coverage to modern industrial, commercial, consumer and government applications in areas where GPS is erratic, jammed or unavailable.
“Locata is proud and delighted to have received an order for NASA’s first LocataNet. Globally significant installations like this prove Locata’s new technology is delivering unprecedented levels of performance to many important new applications,” said Nunzio Gambale, Locata CEO. “As our technology roll-out begins to gain pace, the exceptional value Locata brings to next-gen mobile apps has attracted interest from players all over the world. In fact, our list of relationships is now looking like a roster of the world’s crème-de-la-crème. I honestly can’t think of a better or more prestigious name than NASA to add to our growing partner list.”
“Our team is savoring the opportunity to work alongside NASA engineers and we’re excited that Locata will help advance the safety-critical performance of Unmanned Aerial Systems,” he continued. “Almost all future mobile devices or machines, be they on the road, in the air, on a mine site, in a port, in a warehouse, in your mobile phone, or part of the inevitable Internet of Things — all of them are critically dependent on pervasive, reliable, high-accuracy positioning. Locata is being leveraged into these next-gen systems because it’s clear that satellite-based solutions alone can no longer deliver what’s required. Soon, as we bring miniaturized Locata transmitters and receivers to market, our innovations will enable even greater advances in cutting-edge consumer, commercial, and government applications.”
NASA Testing Program. As part of its UAS research, NASA is testing a system that would make it possible for unmanned aircraft to fly routine operations in United States airspace. Through the agency’s Unmanned Aircraft Systems Integration in the National Airspace System (UAS-NAS) project, NASA, General Atomics Aeronautical Systems, Inc. (GA-ASI) and Honeywell International, Inc., are flying a series of tests which began on June 17 and will run through July at NASA’s Armstrong Flight Research Center in California.
“We are excited to continue our partnership with GA-ASI and Honeywell to collect flight test data that will aid in the development of standards necessary to safely integrate these aircraft into the National Airspace System,” said Laurie Grindle, UAS-NAS project manager at Armstrong.
This is the third series of tests that builds upon the success of similar experiments conducted late last year that demonstrated a proof-of-concept sense-and-avoid system. The tests engage the core air traffic infrastructure and supporting software components through a live and virtual environment to demonstrate how a remotely piloted aircraft interacts with air traffic controllers and other air traffic.
“This is the first time that we are flight testing all of the technology developments from the project at the same time,” Grindle said.
This series of tests is made up of two phases. The first is focused on validation of sensor, trajectory and other simulation models using live data. Some of the tests will be flown with an Ikhana aircraft, based at Armstrong, that has been equipped with an updated sense-and-avoid system, as well as other advanced software from Honeywell.
Other tests will involve an S-3B plane from NASA’s Glenn Research Center in Cleveland, serving as a high-speed piloted surrogate aircraft. Both tests will use other aircraft following scripted flight paths to intrude on the flight path the remotely-piloted craft is flying, prompting it to either issue an alert or maneuver out of the other aircraft’s path. These flights will also conduct the first full test of the traffic alert and collision avoidance system (TCAS II) on a remotely piloted aircraft.
During the June 17 test, which lasted a little more than five hours, the team accomplished 14 encounters using the Ikhana aircraft and a Honeywell-owned Beech C90 King Air acting as the intruder. A second test was flown the following day, with a total of 23 encounters. The project team plans to fly more than 200 encounters throughout the first phase of the test series.
“Our researchers and project engineers will be gathering a substantial amount of data to validate their pilot maneuver guidance and alerting logic that has previously been evaluated in simulations,” said Heather Maliska, Armstrong’s UAS-NAS deputy project manager.
The second phase of the third test series will begin in August and will include a T-34 plane equipped with a proof-of-concept control and non-payload communications system. It will evaluate how well the systems work together so that the aircraft pilots itself, interacts with air traffic controllers and remains well clear of other aircraft while executing its operational mission. The aircraft, which will have an onboard safety pilot, will fly an operationally representative mission in a virtual airspace sector complete with air traffic control and live and virtual traffic.
Calling it an “unprecedented and deeply worrying total disruption . . . [that] shook the industry,” Locata Corporation reiterated its call for redundant terrestrial systems to back up GNSS in the wake of the April 1 11-hour GLONASS system outage.
Nunzio Gambale, Locata CEO, said “We have been telling the industry for years that you cannot have a critically important capability like GPS without also having a backup! What is Plan B if the satellite systems fail? What replaces the space signal when there is a problem? If anyone needed a sign to understand why Locata has spent years inventing and developing the world’s first local terrestrial equivalent of the GPS system, then last week’s meltdown of a complete global satellite navigation system is it. This event should terrify every nation, government, and company that depends on navigation satellites for their business or, in some cases, their very lives.”
The navigation and timing functions of the global positioning systems underpin the world’s banking systems, stock exchanges, digital TV and Internet, cell phone networks, and, in some cases, the national electricity supply, Locata pointed out. GPS, in particular, plays a crucial role in transportation, shipping, and logistics, serving as the enabling technology for critical functions like air traffic control. Reliability is therefore not just important; it is essential across all applications. Locata, the Resilient Navigation and Timing Foundation (RNTF) in Washington, D.C., and others have persistently called attention to the need for redundant terrestrial systems that will back up expensive, vulnerable, and aging global satellite navigation constellations while simultaneously providing the local control and resiliency that satellite-based systems cannot deliver.
Professor Chris Rizos of the School of Civil and Environmental Engineering at the University of New South Wales stated that “This catastrophic failure of one of the world’s two global satellite navigation constellations is a wakeup call for all of us. We ignore the possibility of these ‘Black Swan’ events at our own peril.”
The GLONASS disruption was felt around the world, immediately upon its origination, especially in professional applications, such as tractor automation for farming, machine control and robotics in mining and heavy industry, and in the national infrastructure used by surveyors and industry across many countries.
“This shows just how interlinked the physical and cyber worlds have now become,” added Professor Brett Biddington, a space and cybersecurity expert from the School of Computer and Security Science at Edith Cowan University, Australia. “The prospect of a software glitch, whether unintentional or intentional, seems highly likely [as a cause for the failure]. If it was a deliberate attack, however, it points to a changing face of warfare where the real enemy may be impossible to detect and deter until very damaging strikes, such as an attack on the GPS system, have already taken place.
“The vital point here is that this is no longer just a question for scientists and technologists. A locally controlled backup system for this essential signal is a national policy question of the highest order.”
Locata Corporation and other industry authorities have long testified on global satellite navigation vulnerabilities and the need for diverse technology options to strengthen and back up GPS, GLONASS, and other systems. Locata developed a robust solution and has been awarded a sole-source contract by the U.S. Air Force (USAF) to provide its terrestrially based alternative positioning for military applications where GPS has been completely jammed. The first wide-area Locata system is being deployed now at the White Sands Missile Range in New Mexico. The USAF demonstrated that the White Sands Locata network delivers what has been extremely high accuracy over a 2,500-square mile area, positioning aircraft flying up to 35 miles away to an accuracy of better than six inches.
A pair of LocataLite transmit antennas overlook a section of the White Sands Missile Range blanketed by the Locata high-precision ground-based positioning system.
“There is no other technology that can do this, and it’s delivered in the complete absence of GPS,” continued Gambale. “What is being demonstrated at White Sands is that Locata supplies precisely the same function as GPS, even when there is no GPS available. That’s exactly what you need if the satellites fail.
“If this event had been a GPS failure instead of a GLONASS failure – and it could very easily have been – then the entire world would have plunged into a catastrophe. This event is the navigation equivalent of a ‘close call moment,’ and from here on out no one can even question that this is a really serious problem that must be addressed. Another industry expert recently told me, ‘If there was a sustained GPS outage, it would cause a global financial nuclear winter from which it would take us decades to recover.’”
Gambale concluded, “We need action to develop local backups like Locata around places like airports and other strategically important areas – now! We must not wait until we are faced with another seemingly impossible event like a complete satellite constellation failure. We may not dodge this bullet a second time.”
Locata terrestrial positioning technologies complement GPS by setting up ground-based transmitters, called LocataLites, to create a local constellation called a LocataNet. Once properly deployed, Locata’s unique nanosecond-accurate TimeLoc system synchronizes the network, which allows it to replicate the positioning capabilities of GPS, locally. LocataNets operate today in environments ranging from small warehouses to open-cut mines, wide-area aircraft approach-and-landing systems, and wider areas for aircraft and unmanned aerial vehicle (UAV) uses.
Perspectives from a senior technical specialist and a production engineer at Newmont Boddington Gold Mine.
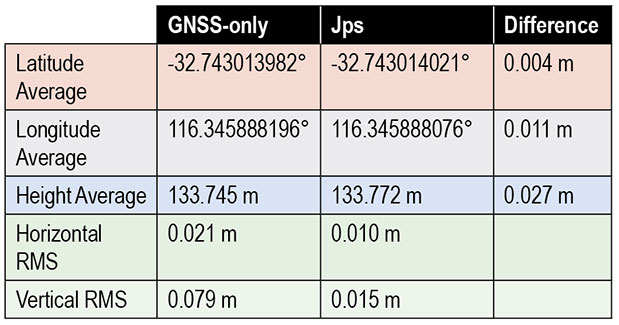
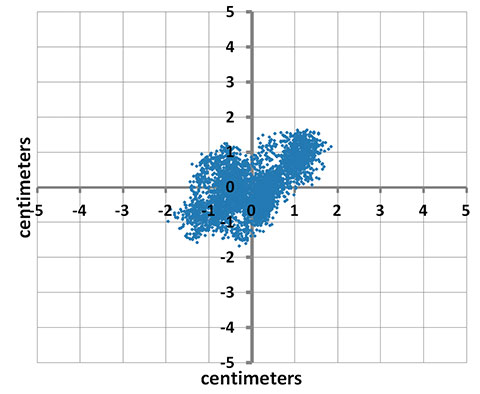
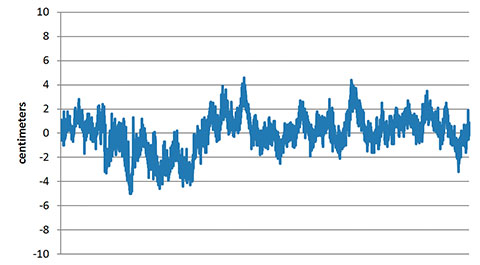
Newmont Fleet Management Services now continually monitors and plots the performance of JPS Locata alongside traditional GNSS in an effort to fine-tune the installed infrastructure. Learning to sculpt the perfect network continues as we move our JPS LocataLite transmitters to accommodate an ever-changing and expanding pit design.
Large twelve-meter benches and an aggressive mining plan have seen both North Pit and South Pit at NBG rapidly increase in depth, bringing the problems associated with GPS coverage in a deep-pit environment.
As mine sites develop and evolve, for the first time ever, we have the ability to dictate and control which areas we direct our own positioning coverage, and guarantee we can sustain accurate high-precision navigation wherever we need it. This level of control has just never been available before, and is literally impossible with satellite-based positioning signals. With GPS you just get what you get.
We are rapidly re-evaluating what may now be possible. We believe we are only at the very beginnings of where we can go with the LocataNet in the mining environment.
Staying One Step Ahead. Shape changes from week to week keep operations continuously relocating around the mine benches; this can, in some instances, make optimal positioning of the Jps LocataNet challenging. In the early stages of the project, we relied on producing computer-generated radio-coverage heat-map models of the pit to determine optimum positions for the individual LocataLite transmitters on the pit rim, and this is still a valid path if given the time.
However, with more Jps rovers becoming available, we now tend to make highly accurate predictions about network configuration on the fly. We can now install spare rovers as portable units in light vehicles (LVs) used by technicians onsite. This roaming functionality allows use of the Jps web browser in the rover to instantly validate, in the pit, any changes that may be required for the network before drilling and digging equipment is moved into place. Thus we can monitor real-world signal conditions in specific areas and adjust LocataLite positions to optimize positioning availability for machines that will soon arrive.
The typical network monitoring scenario nowadays is to quickly move a JPS-enabled LV onto a bench or area yet to be drilled or excavated, and review the signals from the individual LocataLite transmitters in real time. Technicians then make any necessary placement changes to the network in advance of any mining equipment arriving. Our ability to now ensure maximum possible positioning and navigation coverage at all times was undreamt of even 12 months ago.
Dual Rover. A modified HP Leica Drill JS System utilizing a Dual Jps Locata Rover has been installed into the drilling supervisors’ LV wagon. The drilling superintendent and supervisors had been exploring ways of moving towards a paperless system that could not only check the drill pattern itself, but also the areas being mined around the pattern. They identified a use-case example where having accurate positional information available in a vehicle enables supervisors to quickly review the construction and positioning of the protective windrows around the drill patterns. Access tracks and bench heights could also be checked without needing to call surveyors in to help. This degree of instantaneous clarity removes the guesswork associated with windrow construction, designed to provide a safety barrier between trucking and drilling operations. Incorrectly placed windrows can lead to potential flow restrictions in either operation, so getting it right the first time in active areas is important.
Mark-up by Night. Drilling supervisors can now accurately measure and monitor progress across the drill patterns using Locata technology to display virtual maps of all active drilling areas. Another spin-off benefit has been the introduction of a fixed point mounted to the front vehicle bullbar, to provide emergency mark-up of patterns during the nightshift when surveyors are not available on site. This helps particularly when a localized Wi-Fi outage prevents drills from downloading the blast pattern to commence drilling operations in an area of the mine. Before Jps, use of this high-precision GPS technology in vehicle had been considered ineffective and impractical because of the unreliable GPS coverage in the bottom of both pits. Plans are now under way to install a similar system into the shovel and auxiliary supervisors’ vehicles.
Forward! Recent group discussions found consensus that the best way to move forward with this technology now is continued integration into GPS, rather than stand-alone systems. Miners are generally a cautious lot: we could hedge our bets through a combined GPS+Locata solution package. Full-scale integration of Locata technology into future standard GPS products is perceived as a way companies such as NovAtel can provide the total package. We envisage a unified system available from all positioning receiver manufacturers that combines the benefits of GPS technology with the evident improvements and back-up that Locata has provided for environments where GPS is unable to function.
We have been in the enviable position of gaining a glimpse into the future, when the power of GPS-style positioning is improved to fill the GPS holes. The results we have obtained are, frankly, addictive. Having experienced this revolution first-hand, it would now be extremely painful to even contemplate going back to our previous GPS-only world.
Locata Fills Satellite Availability Holes in Obstructed Environments
By Chris Rizos, Nunzio Gambale, and Brendon Lilly
An integrated GNSS+Locata system installed on drills, shovels, and bulldozers — the full complement of high-precision machines on site — at Australia’s Newmont Boddington Gold Mine has increased positioning accuracy and availability, as well as mine operational efficiencies, demonstrating an improvement in availability over GNSS-only of 75.3 to 98.7 percent.
Many of the new paradigms in mining have at their core the requirement for reliable, continuous centimeter-level positioning accuracy to enable increased automation of mining operations. The deployment of precision systems for navigating, controlling, and monitoring machinery such as drills, bulldozers, draglines, and shovels with real-time position information increases operational efficiency, and the automation reduces the need for workers to be exposed to hazardous conditions.
GPS singly, and GNSS collectively, despite their accuracy and versatility, cannot satisfy the stringent requirements for many applications in mine surveying, and mine machine guidance and control. Increasingly, open-cut mines are getting deeper, reducing the sky-view angle necessary for GNSS to operate satisfactorily.
A new terrestrial high-accuracy positioning system can augment GNSS with additional terrestrial signals to enable centimeter-level accuracy, even when there are insufficient GNSS (GPS+GLONASS) satellite signals in view for reliable positioning and navigation. Locata relies on a network of synchronized ground-based transceivers that transmit positioning signals that can be tracked by suitably equipped user receivers.
In September 2012, Leica Geosystems launched the first commercial product integrating GNSS and Locata capabilities into a single high-accuracy and high-availability positioning device for open-cut mine machine automation applications: Leica Jigsaw Positioning System (Jps) – Powered by Locata. This article describes technical aspects of this technology and presents positioning results of actual mine operations.
In the near future — perhaps by 2020 — the number of GNSS and augmentation system satellites useful for high-accuracy positioning will increase to almost 150, with perhaps six times the number of broadcast signals on which carrier phase and pseudorange measurements can be made. However, the most severe limitation of GNSS performance will still remain: the accuracy of positioning deteriorates very rapidly when the user receiver loses direct view of the satellites. This typically occurs in deep open-cut mines as well as in skyscraper-dominated urban canyons.
Locata’s positioning technology solution provides an option either to augment GNSS with extra terrestrial signals, or to replace GNSS entirely. Locata relies on a network of synchronized ground-based transceivers (LocataLites) that transmit positioning signals that can be tracked by suitably equipped user receivers. These transceivers form a network (LocataNet) that can operate in combination with GNSS, or entirely independent of GNSS.
Pseudolites are ground-based transmitters of GPS-like signals. Most pseudolites developed to date transmit signals at the GPS frequency bands. Both pseudorange and carrier-phase measurements can be made on the pseudolite signals. The use of pseudolites can be traced back to the early stages of GPS development in the late 1970s, when they were used to validate the GPS concept before launch of the first GPS satellites.
In 1997, Locata Corporation began developing a technology to provide an alternate local GPS signal capability that would overcome many of the limitations of pseudolite-based positioning systems by using a time-synchronized transceiver. The LocataLite transmits GPS-like positioning signals but also can receive, track, and process signals from other LocataLites. A network of LocataLites forms a LocataNet, and the first-generation system transmitted signals using the same L1 frequency as GPS. Time-synchronized signals allow carrier-phase single-point positioning with centimeter-level accuracy for a mobile unit. In effect, the LocataNet is a new constellation of signals, with some unique features such as having no base station data requirement, requiring no wireless data link from reference station to mobile receiver, and no requirement for measurement double-differencing.
Improvements dating from 2005 use a proprietary signal transmission structure that operates in the license-free Industry Scientific and Medical (ISM) band (2.4–2.4835GHz), known globally as the Wi-Fi band. Within this ISM band, the LocataLite design allows for the transmission of two frequencies, each modulated with two spatially-diverse PRN codes. From the beginning the driver for the Locata technology was to develop a centimeter-level accuracy positioning system that could complement, or replace, conventional RTK-GNSS in environments such as open-cut mines, deep valleys, heavily forested areas, urban and even indoor locations, where obstruction of satellite-based signals occurs.
Leica Geosystems has been testing Locata in the Newmont Boddington Gold Mine (NBG) in Western Australia for several years. In 2006, NBG started installing Leica Geosystems high-precision GPS-based guidance systems for fleet management. The mine operators determined early on that as the pit grew deeper, they would need an alternative positioning system for these guidance systems to continue working for the life of the mine. In March 2012, Leica Geosystems deployed a world-first production version of its Jigsaw Positioning system, integrating GNSS+Locata, at the NBG mine.
Expected to become Australia’s largest gold producer, the mine consists of two pits (Figure 1). The North Pit at NBG is currently about 1 kilometer long, 600 meters wide, and now approaching 275 meters deep.
Figure 1. Location of 12 LocataLites at NBG Mine.Figure 2. The Newmont Boddington pit, 900 feet deep and going deeper all the time, creates difficulties for GNSS equipment positioning the mine’s heavy machinery.
A single LocataNet consisting of 12 LocataLites was deployed during April and May 2012 in an initial installation designed to cover both pits in the mine. The results presented here are taken from tests in the North Pit.
Leica’s version of the LocataLite is solar-powered and designed to be placed in the best locations to achieve the maximum benefit. As no special consideration for the location of a transmitter base station is required, the LocataLites can be placed in areas on the rim of the pit or just above the machines operating in the pit floor. The only set-up requirement is that they are able to see at least one other LocataLite to synchronize their transmissions to around 1 nanosecond or better throughout the mine.
Each Jps transmit tower has four small patch antennas mounted in an array. The uppermost is a GNSS antenna used to self-survey the top of the tower, and hence derive the positions of the other antennas below it on the tower. The Locata transmit 1 antenna is mounted directly under the GNSS antenna. The Locata receive antenna is directly under that, and the Locata transmit 2 antenna is around two meters lower down on the tower.
All the antennas are separated by a known distance, and the LocataLite transmit antennas can be tilted down into the pit to maximize the signal broadcast into the area. Each LocataLite transmits four independent positioning signals, two signals from each transmit antenna. These signals provide a level of redundancy and greatly assist in the mitigation of multipath problems in the pit, thereby contributing to the robustness and reliability of the positioning solution.
Jps receivers were first installed on two production drill rigs in April 2012. Installation on drills was the highest priority because they are the machines at NBG that operate closest to pit walls and other obstructions, and therefore stood to benefit most from having more reliable positioning. Each Jps receiver incorporates two GNSS and two Locata receivers (Figure 3). One GNSS and Locata receiver pair is connected to a co-located antenna on one side of the machine and the other GNSS and Locata receiver pair is connected to the other co-located antenna. The GNSS receivers obtain their RTK corrections from an RTK base station. The Locata receivers do not require any corrections. The system uses the NMEA outputs from both pairs of receivers to determine the position and heading of the drill rig for navigation purposes.
Figure 3. Jps receiver with integrated GNSS and Locata receivers and two receiver antennas.
The goal of the Jps receiver is to improve the availability of high-accuracy RTK positions with fixed carrier phase integer ambiguities. The results presented here are therefore divided into three sections:
Improvements in availability over a two-month period for all the data in the North Pit.
Improvements in availability for an area in the pit where the GNSS savings are expressed in dollar terms.
Accuracy results achieved and maintained in this GNSS-degraded area.
The performance results shown here are real-world samples of the system operating on drills at NBG. However, it will be appreciated that GNSS satellites are in constant motion, so GNSS-only position availability in different parts of the pit changes by the hour. The results therefore only apply to those drills in those positions in the pit at that time.
Another drill a little distance away in the same pit could experience far better or far worse GNSS availability at exactly the same time.
Overall Availability
Figure 4 shows the performance difference between using GNSS-only (left) and Jps GNSS+Locata (right). The data for these plots was recorded for the two drills that contained the Jps receiver in the North Pit during the months of April and May 2012. A green dot represents the time the receiver had a RTK fixed solution, and a red dot represents all other lower-quality position solutions — essentially when the receiver was unable to achieve the required RTK accuracy because of insufficient GNSS signals or geometry.
Figure 4. Plots of availability and position quality in the North Pit at NBG for April and May 2012 for GNSS (left) and Jps (right). Green = RTK (fixed) solution, Red = all lesser quality solutions.
Although the availability of GNSS-only RTK fixed position solutions was reasonably good over this entire area, being at the 92.3 percent level at that time, the Jps nevertheless provided a measurable improvement of 6.5 percent to availability, bringing it up to 98.8 percent. Considering that during those two months, the two drills spent a total of 72.24 operational days in the North Pit, this improvement equates to nearly 4.7 days or 112.7 hours of additional guidance availability.
Figure 5 highlights the low positional quality for the GNSS-only solutions and how Jps significantly improved the availability in areas of limited GNSS satellite visibility.
Figure 5. Plots showing non-RTK quality positions, demonstrating that Jps can help reduce lesser-quality RTK solutions. (Performance in the circled area is highlighted in more detail in Figure 6.)
Availability in Poor GNSS Visibility
The ellipse in Figure 5 highlights a particular location in the North Pit where GNSS positioning consistently struggles due to the presence of the northern wall and to a lesser extent from the eastern wall. The integration of GNSS and Locata signals improved availability as shown in Figure 6, which in this case increased by 23.4 percent.
Figure 6. Zoomed-in area where GNSS performance was poor between May 2 and May 4, 2012. The circled area shows where the accuracy tests were performed.
As the machine downtime due to not having a RTK position costs the mine approximately U.S. $1000 per hour for each drill, the improvement in availability of 112.7 hours for just the two drills shown in Figure 5 over the two months equates to a savings of $112,700 in operational costs. This productivity increase is significant, considering that the GNSS-only availability in this case still seems relatively good at 92.3 percent. If the GNSS availability for those two months was more like 75 percent — as was the case shown in Figure 6 for the two days in May — then the cost savings become far greater, approaching nearly $400,000, for just two drills over two months. Even a small increase in productivity brings a significant financial benefit ($110,000 per hour) when all 11 drill rigs running in the mine are affected by loss of GNSS positioining availability, yet continue to operate with Jps.
Today all 11 drills in the pits have been fitted with the Jps GNSS+Locata Receivers. As a point of reference to emphasize the level of operational savings: if the Jps had been fitted to all 11 drills during the April and May 2012 period shown in the above results, the cost savings at that time would have been on the order of $1,000,000. It is clear that the savings in production costs that can be gained from improving the availability to the fleet guidance system has a significant impact on the return-on-investment, potentially covering the installation costs within months of deployment. It should also be emphasized that as the pits get deeper, GNSS availability will only degrade further, and the evident production and dollar benefits of the integrated GNSS+Locata system become even larger.
Relative Accuracy
The above levels of improvement in availability are of no benefit if the position accuracy is not maintained within acceptable limits. In order to compare the relative accuracy between the two systems, a dataset was taken from the same data above (circle in Figure 6) when the machine was stationary.
The average position difference between the GNSS-only and Jps receivers for the hour-long dataset was 1.2 centimeters horizontally and 2.7 cm in the vertical component (Table 1). The spread of the position solutions for the two receivers were comparable in the horizontal, with Jps providing a slightly better horizontal RMS value due to the extra Locata signals being tracked and the stronger overall geometry. Additionally, Jps showed a better RMS in the vertical compared to GNSS-only.
Table 1. Comparison of relative accuracy and RMS between the GNSS-only and GNSS+Locata solutions.
Figure 7a shows the spread of horizontal positions for the Jps receiver, where 0,0 is the mean horizontal position during this time. Note that all the positions are grouped within +/-2 cm of the mean without any outliers. Figure 7b shows the corresponding spread in the vertical positions. These are well within the acceptable accuracy limits required by the machine guidance systems used at the mine.
Figure 7A. Scatter plot of the positions from the Jps receiver over a period of over an hour.Figure 7B. Vertical error for same sample set as Figure 7a.
Concluding Remarks
Based on the experiences at Newmont Boddington Gold, use of Jps has improved the operational availability of open-pit drilling machines by at least 6.5 percent by reducing the outages in 3D positioning caused by poor GNSS satellite visibility commonly associated with deep pits. When Jps is subjected to much harsher conditions closer to high walls, the Jps continues to perform and the improvement in availability compared to GNSS-only is more significant while still maintaining RTK-GNSS levels of accuracy. The additional availability achieved translates directly into cost savings in production for the mine.
Acknowledgments
The first author acknowledges the support on the Australian Research Council grants that have supported research into pseudolites and Locata:
LP0347427 “An Augmented-GPS Software Receiver for Indoor/Outdoor Positioning,”
LP0560910 “Network Design & Management of a Pseudolite and GPS Based Ubiquitous Positioning System,”
LP0668907 “Structural Deformation Monitoring Integrating a New Wireless Positioning Technology with GPS,”
DP0773929 “A Combined Inertial, Satellite & Terrestrial Signal Navigation Device for High Accuracy Positioning & Orientation of Underground Imaging Systems.”
The authors also thank the many people that have contributed to the development of the Leica Jps product. The Leica Geosystems Machine Control Core and CAL teams in Brisbane and Switzerland, other Hexagon companies such as Antcom Corporation and NovAtel, the Locata team in Canberra and the United States, and the people at Newmont Boddington Gold that have gone out of their way to make this a success.
Chris Rizos is a professor of geodesy and navigation at the University of New South Wales; president of the International Association of Geodesy; a member of the Executive and Governing Board of the International GNSS Service (IGS), and co-chair of the Multi-GNSS Asia Steering Committee.
Nunzio Gambale is co-founder and CEO of Locata Corporation, and represents the team of engineers who invented and developed Locata.
Brendon Lilly is the product manager for the Leica Jps product at Leica Geosystems Mining and has worked for more than 20 years in both software and hardware product development. He has a Ph.D. from Griffith University.
The Air Force Institute of Technology (AFIT) and Locata Corporation have signed a Co-operative Research & Development Agreement (CRADA) to build and demonstrate new Locata multipath mitigation technology for use in GPS receivers. This cooperation is expected to leverage many years of proprietary Locata ground-based technology development to bring completely new capabilities to satellite-based GPS receivers, AFIT said.
The Air Force Institute of Technology, or AFIT, is the Air Force’s graduate school of engineering and management as well as its institution for technical professional continuing education.
The CRADA is specifically directed to evaluate Locata’s patented correlator and switching antenna technologies for use in positioning receivers running at GPS frequencies. Locata’s engineers will transfer knowledge and experience they have gained with existing Locata commercial systems to help AFIT design and build an initial multi-element GPS-based switching antenna prototype which is based on Locata’s patents. This will ensure AFIT researchers and engineers can familiarize themselves with the new antenna’s characteristics, and provide AFIT with an essential platform to develop GPS-specific versions of Locata’s correlator and switching algorithms. When built, AFIT intends to use its GPS receiver and the prototype switching antenna to physically demonstrate the feasibility of using Locata technology to improve GPS receiver performance.
An animation was created specifically to explain RF problems created by multipath and Locata’s VRay solution. The animation shows the first proof-of-concept 2D, 64-element antenna Locata’s engineers prototyped in 2011.
After initial prototypes are built, AFIT plans to design and test several other GPS-based versions of Locata’s switching antenna array to assess how Locata’s commercial antennas can be adapted to use cases which are of particular interest to the military. Designs already discussed with Locata include stand-alone antennas, arrays conformal to a vehicle’s frame (such as a Humvee’s roof or aircraft fuselage), and a version built into helmets.
As a first step in implementing this CRADA collaboration, AFIT personnel visited Locata’s head office the week of April 29 for a detailed, wide-ranging introduction to the design fundamentals for this new type of antenna. Locata hosted AFIT’s John Raquet, Peter Collins and Jason Barhorst (see picture) in multiple engineering meetings where Locata’s current production version antenna was revealed for the first time, and then closely analyzed. AFIT and Locata engineers then workshopped the modification and design choices required to integrate Locata design into a GPS form-factor.
“If this CRADA is successful, Locata’s technology could enable a significantly improved technical performance and reduction in the cost of multiple-element GPS antennas,” said John Raquet, director, Advanced Navigation Technology Center, AFIT. “This will enable much wider adoption of the technology, resulting in more reliable GPS positioning for more users. We are excited to investigate this technology advance for the benefits it will potentially bring to American warfighters.”
“We are incredibly proud to once again be involved in a CRADA with the Air Force Institute of Technology, developing on the cutting-edge of navigation technology,” said Nunzio Gambale, CEO and co-founder, Locata Corporation. “Our previous LocataNet partnership with Dr. Raquet and his world-class AFIT researchers quickly taught us why this team is renown throughout the industry. The AFIT engineers bring an exceptional skill base to this important integration of Locata technology into GPS receivers. I’m certain that our collaboration, along with access to the USAF’s unmatched prototyping and testing capabilities, will deliver ground-breaking functionality for future GPS devices.”
AFIT expects at least one master’s degree to be awarded for the research tasks involved in the CRADA. Work against the approved CRADA project plan will commence immediately, and involve several other participants providing admin and lab support to AFIT and Locata. The final report produced by this CRADA will include results and measured performance of the Locata-enhanced GPS receiver and other design considerations gleaned from AFIT’s experience with the new Locata antenna and correlators.
AFIT-Locata Kick-off Meeting: This is the first picture ever released by Locata which shows their radically new switching antenna, a design that AFIT will now modify for use with GPS receivers. Pictured (L-R): Dr. Steve Hewitson & Ian Sainsbery (Locata engineers); Jason Barhorst (AFIT); David Small (Locata technology inventor), Nunzio Gambale (Locata CEO), Dr. John Raquet (Director, Advanced Navigation Technology Center, AFIT), Dr. Peter Collins (AFIT), Dr. Trevor Hobbs (Locata Director of R&D).