Two Autonomous Vehicles Seek Safe Avoidance in Critical Tests
A new state-of-the-art research center runs car-makers’ safety systems through their paces, in tandem with a soft-target robot that can be crash-impacted without adverse effects. Precise positioning and exact repeatability of test sequences are key criteria.
Paul Perrone, Perrone Robotics
The Insurance Institute for Highway Safety has undertaken a $30 million expansion project at its Vehicle Research Center near Washington, D.C., enlarging and enhancing a state-of-the-art vehicle test track and building a new 700 x 300-foot (213 x 91-meter) covered track for weather-resistant testing.
The VRC will use new robotic and positioning technologies to achieve required levels of precision and repeatability for vehicle testing of frontal collision avoidance and other safety systems. Tests of both the same and different vehicles must be conducted under identical, controlled conditions for the results to have comparable fidelity.
Crash tests and research conducted at the VRC help drive life-saving improvements in vehicle designs. The new facility will enable staff to evaluate emerging automated vehicle technology in commercial vehicle systems intended to prevent crashes or lessen their severity, with the goal of encouraging the entire industry to adopt the most effective new features.
Safety systems in vehicles to be tested include the following:
◾ Adaptive cruise control
◾ Collision-imminent braking
◾ Lane-departure warning/correction
◾ Other automated technologies.
Such functions represent semi-automated functions aboard vehicles now on the road. The system is also designed to address and test the full spectrum of semi- to fully-automated vehicles, addressing evolving levels of autonomy and ultimately producing driverless vehicle technology.
IIHS has contracted Perrone Robotics, Inc. (PRI), to deliver a robotic system for testing such vehicles. PRI develops new applications using its MAX robotics and suite of automation software building blocks. MAX enables rapid integration of a range of sensor and actuator types and has evolved with several frameworks, including MAX-UGV for unmanned ground vehicles. PRI has used MAX-UGV to build automated passenger cars, all-terrain vehicles, tractors, custom platforms, and rockstar Neil Young’s long-range electric LincVolt, a converted 1959 Lincoln Continental.
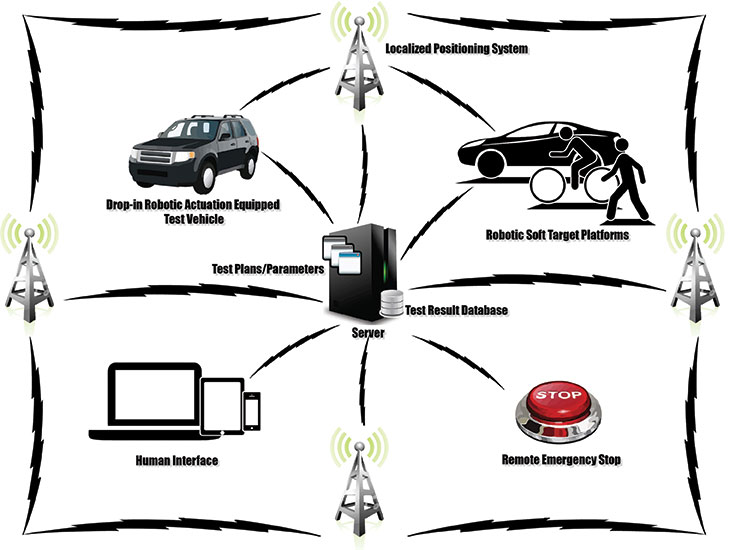
FIGURE 1. PRI test system.
For the first phase of the IIHS project, the Perrone Robotics system includes a robot target vehicle with the footprint of a car, but measuring only 4 inches high, with a 1-inch ground clearance.
A robot target vehicle with the footprint of a car measure 4 inches high. Photos: Brian J. Geiger.
Test Scenario Example. One instance to be tested is National Highway Traffic Safety Administration criteria for crash-imminent braking (CIB). The CIB concept goes beyond the forward-collision warning systems already found in many new cars by actually engaging the brakes when a driver, at fairly slow speeds, gets too close to the car in front of him. In tests, the while the test vehicle travels at similar speeds on a programmed collision course with the robot.
The target robot vehicle carries one of a number of soft targets. If the vehicle under test fails to prevent a collision with the robot target, the test vehicle runs over the robot target vehicle, dislodging the soft target, but avoiding damage to the test vehicle, robot target vehicle, and the soft target. The next phase of the project adds smaller-footprint target robot platforms with soft targets, representative of pedestrians and cyclists.
To ensure that the test vehicle can perform repeatable tests, the system also includes a drop-in actuator kit that can be installed into any test vehicle in 30 minutes or less. The system is designed to allow a human driver to sit comfortably in the vehicle and optionally drive, but can also control the throttle, brake, and steering to drive test profiles. Repeatability is key for the operation of robots and vehicles, as well as track conditions, which will be helped by the covered track.
The VRC test track is installing Locata as its positioning system. In addition to alleviating concerns about GPS outages or dead/weak signal spots, this enables the PRI system to be operated reliably inside the new covered test track. While GPS is not an option for covered or indoor test sites and suffers from environmental issues, the high fidelity and localized positioning provided by Locata overcomes these barriers to test.
Drop-in actuator kit steering. Photos: Brian J. Geiger.Drop-in actuator kit throttle-brake. Photos: Brian J. Geiger.
PRI will deliver the target robot and drop-in actuators custom-built. The company looked at starting with existing platforms and building from them, but it would have been infeasible or overly expensive to meet the IIHS requirements for this system. Most existing systems were developed for vehicle dynamics testing or low-speed/simple collision testing. Most couldn’t handle some or all of the more challenging requirements such as the following:
Drop-in actuator kit:
Allow human driver to sit comfortably and drive the vehicle without interfering;
Drive autonomously while also allowing for hybrid modes whereby test drivers and onboard systems may assist or take over controls;
Offer out-of-the-box programmability and flexibility to handle a wide range of test scenarios and automated vehicle levels;
Install into any vehicle in 30 minutes or less;
Do not damage vehicle with installation; retain a significant percent of resale value.
Target robot vehicle:
Accelerate from 0 to 55 mph in 10 seconds;
Survive collisions at speeds up to 55 mph;
Allow collision-avoidance testing with minimal damage to test vehicles and target robot;
Scale for carrying a wide variety of soft-target payloads and enable a wide range of vehicles, from small car to SUV to tractor-trailer) to be tested.
Locata positioning system:
Work outside and also on covered track; cover track area with no dead/weak spots;
Deliver better than 10-centimeter accuracy for position measurements and relative position control of robots and vehicles;
Deliver position updates at 100 Hz in combination with attitude and heading reference system (AHRS) or inertial navigation system (INS).
The positioning requirement derives from the testers’ need not only for accurate location data of each vehicle, but for precise knowledge of how far apart they are while performing real-time control to orchestrate repeatable scenarios, intersecting vehicle and robot paths to determine whether the vehicle acts to prevent a collision.
A human operator is easily accomodated within the drop-in actuator kit. Photos: Brian J. Geiger.
Safety Systems
There is a driver in the test vehicle, and there are personnel present at the test site who could be injured by a test vehicle or target robot platform. In addition to wireless e-stop remotes, the test vehicle and target robot systems can be disabled and stopped by a number of events. In the target robot, an e-stop causes the battery pack to be completely disconnected from all vehicle systems, and a spring-load is released applying mechanical braking to stop the vehicle.
Under normal conditions, the spring is held back with a pneumatic system and air is dumped upon e-stop event. A target robot e-stop is triggered by
◾ remote e-stop controller
◾ a command issued by control software
◾ loss of communication with external systems
◾ failure of or loss of communication with internal systems
◾ loss of power.
Aside from fail-safe remote and onboard e-stop systems, additional safety measures are employed by means of safety controllers that monitor safety-critical regions of software, implement a wide range of robot-safety checking rules, and ensure that the robot is operating within safe parameters of the environment (such as by staying within an invisible fence and pre-defined operation boundary).
Common MAX-UGV Robot Logic
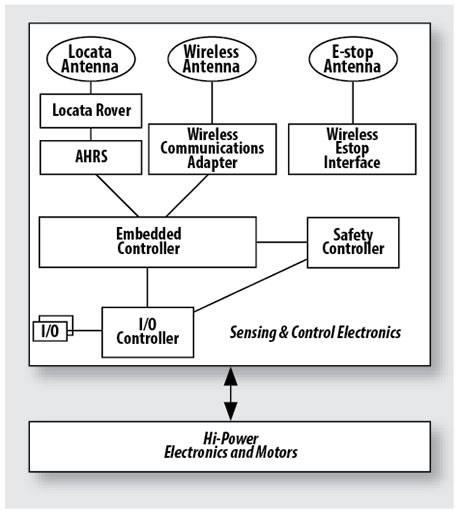
A common instrumentation and control system (CICS) for both the target robot platforms and test vehicle instrumentation and robotic assist platforms is illustrated in Figure 2.
FIGURE 2. Target robot logic flow.
Embedded Controller. The heart and soul of the vehicle hosts and runs the algorithms, receives sensor data, and executes actuation commands to the motor controllers based on desired route plans and dynamic sensor information. This controller runs the MAX software platform, MAX-UGV framework, and various MAX drivers.
I/O Controller. Handles inputs from sensors for temperatures, voltages, and currents as well as monitoring limit switches and actuating relays. Certain controls are planned such as mock brake lights on target robots and warning lights in test vehicles.
Locata. A constellation of nine LocataLite units on towers covers the existing track for Phase I of the project. Phase 2 will require additional units to add coverage to the covered track; some towers will provide coverage to both tracks. Each target robot vehicle and each drop-in kit for the test vehicles carries a Locata rover.
Locata’s new software essentially adds some capability from its indoor software to its outdoor software to deal with reflections/multipath issues caused by the metal buildings at the test site. The new software also allows the rover to perform real-time calculations on board, required for the less-than 10-cm accuracy. Previously this had to be done on a separate system and data had to be transferred back and forth, which worked against meeting real-time position update requirements for controlling speed, position, and relative position of robots and test vehicles. In test vehicles and target robots, the Locata rover position updates are merged with the output of an attitude, heading, and reference system (AHRS).
AHRS. The CICS in the robots and test vehicles includes an AHRS that provides the required heading, position, and velocity updates. Accuracy requirements are heading, 1 degree; position, less than 10 centimeters; velocity, 1 mph. Our required position update rate is 10 Hz. We expect to achieve 100 Hz in our system, which improves self-nav capability and overall performance. This rate also applies to other measured/logged data. A Kalman filter computes data from sources within the AHRS and from external sources: GPS and Locata.
Wireless Adapter, Antenna. On our critical channel, we exchange messages between vehicles to effect proper trajectory and relative positioning. Our e-stop controllers and safety systems also use this network. The non-critical channel is used for test setup and supervisory control, decimated data transmission for HMI monitoring, and logged data transmission.
Wireless E-stop Interface. This interface is for remote shutdown of a vehicle. The e-stop triggers are similar for the test vehicle systems, but the driver can also disable the robotic system. Rather than brake the test vehicle, an e-stop of the test vehicle systems disables the steering, brake, and throttle actuators into limp-mode and releases control of the test vehicle to the driver.
Safety Controller. A separate watchdog controller monitors live conditions and the embedded controller and onboard systems, and serves as a direct line for remote wireless e-stop.
Electronics, Motors. These includes six high-performance 4-inch motors, motor controllers, cut-off contactors, and overall cut-off system for e-stop.
Conclusion
The IIHS expansion project is a first of its kind for automated vehicle testing, breaking new ground for target positioning and control, and providing the first indoor test track for this purpose. Data from these tests will be used to improve safety of on road semi- and fully-automated vehicles and help save many thousands of lives, setting a high bar for capability and performance of all automated vehicle functions. Requirements for safety, repeatability, and seamless handoff between driver and autonomous control of the test vehicles, as well as the speeds at which the robots must travel and survive collisions, pose significant challenges. We believe our systems meet them fully.
A LocataNet will provide the vitally important high-precision positioning required by the VRC to perform rigorous, consistent and repeatable scientific evaluation of the new vehicle crash avoidance systems, Locata said. VRC crash tests produce the “Top Safety Pick” ratings that have helped consumers make informed decisions about buying safer cars for years. Now research into new technology systems, which allows cars to avoid crashes in the first place, will elevate the value of the institute’s safety ratings, Locata said.
Carrying out these new tests is not a trivial exercise, Locata said. The VRC will have to research and install new robotic and positioning technology to enable the required level of precision. The LocataNet installation will furnish the IIHS with a locally controlled positioning system that is seamless over all of the VRC test areas, enabling extremely reliable automated positioning of vehicles. The newly expanded facility includes a continuous vehicle test track that traverses not only open-air roadway areas, but also a vast 300- by 700-foot fully covered testing area. Locata’s ability to provide centimeter-accurate, locally controlled positioning across both outdoor and indoor environments gives the IIHS flexibility to design a positioning system to meet their vital test requirements, while also allowing easy upgrade and expansion in the future, Locata said.
The dramatic video footage from IIHS crash tests draws extensive media coverage, which becomes a powerful public incentive for automakers to improve the safety of their vehicles. The media, auto industry and policymakers look to the IIHS as a leader in highway safety research, and the expanded VRC will enable the IIHS to play a major role in the emerging area of crash avoidance testing, Locata said. IHS’s YouTube channel shows crash tests and dicusses the ratings system.
“Crash tests and research conducted at the VRC have helped drive life-saving improvements in vehicle designs,” said Adrian Lund, IIHS president. “Our new state-of-the-art facility will allow us to also evaluate emerging vehicle-based systems intended to prevent crashes or lessen their severity, so that we can encourage the entire industry to adopt the most effective ones.”
To do this new research, it is essential to conduct tests under identical, controlled condition, Locata said. With Locata, IIHS researchers will be able to ensure precise positioning data is available in all of its test areas. In places where GPS signals would be unreliable or unavailable when tests are conducted under cover, Locata seamlessly delivers consistent, reliable and accurate positioning, available everywhere, the company said. It will help IIHS carry out automated, identical testing to allow “apples to apples” comparisons of motor vehicles. This is a critical advancement for testing systems that will save many lives in the future, Locata said.
The planned Locata-enabled covered test track.The Locata-enabled covered test track building (artist’s concept).
Here is a video tour of the VRC.
Locata technology provides GPS-style, ground-based positioning covering local areas ranging in size from a parking lot to thousands of square miles. It provides precise positioning either in combination with, or in the total absence of, GPS. It is the first technology that can replicate GPS’s precise positioning capability without using satellites.
Locata’s current devices have already delivered new positioning capabilities to professional applications in mining, aviation, warehousing, and as “GPS backup systems” for important strategic areas. Locata is being trialed by several government bodies in urban areas as a locally controlled positioning infrastructure in applications for transport, first responders, surveyors, and container port automation. As Locata devices are further miniaturized over the next few years, this technology promises to be a game changer for the positioning capabilities available to indoor, mobile and smartphone applications, Locata said.
The partners met at the VRC on February 14 to plan out the Locata installation. From left are Robert “Bo” Jones, IIHS engineer; Paul Perrone, president, Perrone Robotics; Geoff Hoekstra, business development, Perrone Robotics; Adrian Lund, president, IIHS; David Zuby, chief research officer, IIHS; Nunzio Gambale, Locata CEO; Jimmy LaMance, Locata. The auto is the result of a crash test conducted that day.
“GPS satellites are in a constant state of motion,” said Nunzio Gambale, CEO of Locata Corporation. “In many environments, this makes it impossible to achieve the level of reliable positioning required for meaningful scientific testing. Locata readily steps into these environments to deliver an always-on, unfailing and superbly accurate positioning signal. We are honored to be chosen as the positioning technology that helps the IHS research, test and drive forward the development of life-saving automotive initiatives. This Locata installation at the legendary Vehicle Research Center will be the most publicly visible jewel in our crown to date. Relationships like this confirm the value of years of hard work we put in to invent this amazing and unique technology.”
“The Locata team is thrilled to see how rapidly our systems are being taken up by the creme-de-la-creme of the positioning industry,” continued Gambale. “We know this VRC testing is world-first, groundbreaking work that has enormous global and social value. It’s wonderful to think that our work may contribute to one day saving my life—or yours.”
Locata Corporation today announced the U.S. Air Force (USAF) has signed a sole-source, multi-year, multi-million dollar contract to install the U.S. military’s first revolutionary ground-based LocataNet positioning system at the White Sands Missile Range in New Mexico. The USAF will field Locata’s new technology for extremely accurate “reference truth” positioning across a vast area of White Sands when GPS is being completely jammed.
In a recent USAF technical report, the need for a new non-GPS based positioning capability was described by the 746th Test Squadron as the key component for “the realization of the new ‘gold standard truth system’ for the increasingly demanding test and evaluation of future navigation systems for the U.S. Department of Defense.” Locata is the new technology now contracted to enable this capability for the USAF’s future truth reference, the Ultra High-Accuracy Reference System (UHARS).
The report documented extensive testing of Locata’s new capabilities when a LocataNet covering 1,350 square miles (3,500 square kms) was first deployed at White Sands. The USAF and the 746th Test Squadron proved a LocataNet can accurately position USAF aircraft over a large area when GPS is denied. Locata delivered accurate independent positioning as good as, or better than, the USAF’s current CIGTF Reference System (CRS). The Locata non-GPS based positioning capability is core to the UHARS that will now replace the CRS in 2014.
After the exhaustive aircraft testing, the USAF concluded that the Locata system had not only met the extremely demanding contractual tracking and positioning requirements, but actually exceeded them on many points. Some of the milestones documented and confirmed by the USAF included:
The USAF report documented LocataNet position accuracy of 2.5 inches (6cm) horizontally and 6 inches (15 cm) vertically – about the size of a dollar bill – for aircraft flying at a distance of 30 miles (50km) at up to 350 mph (550 km/hr) at 25,000 feet, without GPS.
Throughout the period of the testing, the entire White Sands network achieved nanosecond-accurate synchronization within several minutes of the LocataNet being activated, and remained synchronized even during severe weather until turned off at the end of each test.
The USAF tests showed that a stock standard Locata transmitter – the same unit used in commercial applications like mining – could have an amplifier attached to easily boost signals for long-range reception. By attaching a simple, inexpensive 10 watt amplifier, the USAF proved that Locata signals could be acquired and tracked by aircraft at distances of up to 60 miles (100 km). Longer distances could be enabled by attaching higher-powered amplifiers.
Before to the White Sands flight trials, commercial Locata systems had only been used to position ground-based vehicles, such as cars, trucks, bulldozers and drill rigs in local areas. For the USAF tests, however, the Locata system needed to function under dynamic aircraft operating maneuvers, including banking, angular and linear accelerations, airspeeds up to 300 knots (560 km/hr), and altitudes up to 30,000 feet above sea level. The required aircraft performance was verified in the real-world testing.
The USAF required Locata to design, prototype and then deliver aircraft-certified antennas for use on both the Locata ground-based transmitters and the USAF aircraft. Locata worked with Cooper Antennas Ltd. of Marlow in Buckinghamshire, United Kingdom, to produce an aircraft-certified version of Locata’s new quadrifilar helix antenna design. The Cooper manufactured antennas were used throughout the tests with excellent results, and confirmed Locata’s research and analysis.
“Locata Corp delivered a LocataNet for use in our October 2011 technical demonstration on White Sands Missile Range that provided time and position truth, independent of GPS, that was better than 18 cm (6 inches) per axis while flying at 15,000 and 20,000 foot above mean sea level profiles,” said Christopher Morin, technical director for the 746 Test Squadron. “The solutions provided by the LocataNet were within the accuracy tolerance of the squadron’s CIGTF Reference System and met our threshold objectives. Further analysis has shown that if we optimize the LocataNet deployment, characterize its errors and tightly couple its range and carrier-phase measurements with the other GPS and inertial components on the UHARS pallet into the UHARS solution post-processing software, I am confident we will be able to meet our 5-cm (2-inch) per axis truth reference objective. I am very pleased with the LocataNet’s demonstrated ability to produce an accurate, dynamic truth reference from the relatively static implementation they had already deployed in the mining industry.”
“Locata products developed and sold by important commercial partners like Hexagon and Leica Geosystems have already shown our new technology is a game-changer for positioning over industrial-sized areas,” said Nunzio Gambale, CEO and co-founder of Locata. “However, proving Locata can provide the USAF with centimeter-accurate non-GPS positioning over a vast military area when GPS is jammed instantly elevates our technology achievements into a completely new league. It’s important to grasp the scale of what we’ve done here. The 2,500 square mile LocataNet at White Sands will be 74 times the size of Manhattan Island. It must be clear, our ability to deliver centimeter-level (inch-level) positioning over an area that large, without using GPS satellites, is both unique and totally revolutionary. No one else on Earth can do this. Many valuable industrial and consumer apps will now be built around our amazing inventions, created by Locata’s co-founder David Small and our brilliant engineers.”
“This contract makes it clear you are witnessing the arrival of one of the most important technology developments for the future of the entire positioning industry,” Gambale declared.
Under this new contract Locata will provide the USAF with Locata receivers and LocataLite transmitters to blanket 2,500 square miles (6,500 sq km) of the White Sands Range. Locata will also:
a) deliver extended hardware warranty, along with ongoing Locata software and firmware upgrades, through to the year 2025;
b) supply multi-year support for the installation, fielding and testing of Locata networks; and
c) provide long-term consultation and expert technical advice to ensure optimal operational performance of the USAF’s fielded LocataNet systems.
Locata Corporation announced today that its integration partner, Leica Geosystems Mining, has begun to sell — and ship to their global mining customers — a Locata-powered positioning systems that it calls “the world’s first.”
The Leica Jps (the Jigsaw Positioning System powered by Locata) integrates GNSS and Locata’s ground-based GPS-like networks. The result is a seamless and a completely new “GPS everywhere” experience for Leica’s customers, the company said. This new capability is now in use at Newmont’s Boddington Gold Mine, northwest of Boddington, Western Australia. The mine has published an independent article describing the LocataNet and Jps systems deployed for the mine’s drill rig fleet. It reported that drill rig up-time and efficiency have skyrocketed to unprecedented levels since the Jps system was commissioned.
Locata-enabled nonstop positioning brings benefits to machine automation in mining because Locata fills in the many gaps in GPS signal availability experienced in an open-cut mine, Leica said. The Leica Jps ensures a reliable and transparent experience for users with demanding machine guidance applications because it uses all available signals, satellite-based or Locata, without interruption.
“The Locata-based Jps is therefore the world’s first system which can justly be considered as ‘a backup for GPS’,” reads a Leica Geosystems statement. “Real-world operational performance, which is being reported by Jps customers, can only be described as ‘spectacular’.”
“Since deploying the Locata-powered Jps at Newmont Boddington Gold, there has been an increase in operational machine guidance availability of almost 23 percent – from 75 percent up to 98 percent,” said Brendon Lilly, product manager, Leica Geosystems Mining. “Newmont Boddington Gold is so happy with the results that they have turned off their GPS-only solutions altogether, and now rely solely (and successfully) on Jps alone. They have already installed Jps on 11 drills and intend to equip their entire high-precision fleet.”
“The ROI we offer our clients through the Jigsaw Positioning System is extraordinary. Market trends indicate CAPEX is in decline, so the parameters mines use to justify expenditure have become far more demanding,” said Stefana Vella, global marketing manager, Leica Geosystems Mining. “The unprecedented production levels and machine control uptime that result directly from using the Locata-powered Jps very quickly justifies the purchase of the system. Furthermore, it aids the justification of expenditure on the high-precision machine guidance systems themselves, for, when operated with the Jps, the ROI increases exponentially. Even in today’s market, it isn’t a difficult decision to make.”
Many mines around the world use machine guidance systems for drills, shovels, excavators, dozers, graders and more to execute the site plan work in real-time. This tight automation dramatically improves efficiency and productivity. At the core of these machine guidance systems are GPS-style receivers that provide vital positioning information, using the satellite signals to calculate a 3D position.
Unfortunately, in most open-pit environments satellite signals become obstructed, which slows or temporarily halts production. As pits become deeper the problems become worse, drastically reducing the number of satellites the receiver can “see” to achieve GPS-style positioning. In the past, mines and other machine automation users had no choice other than to resort to much less efficient alternatives, such as manual surveying. Reduced satellite visibility therefore negated the considerable investment and operational efficiencies gained from modern machine guidance systems. The key to virtually eliminate these issues is Locata’s new “GPS-backup or replacement” capability, Leica Geosystems said.
Locata’s Locatalite device is a ground-based transmitter that generates a GPS-like signal. LocataLites deployed around the pit rim can ensure almost 100 percent positioning coverage. Locata signals “fill-in” the GPS holes with a signal that is processed by the Jps in exactly the same way that GPS signals are. Locata is the only technology in the world that can do this. By backing up their GPS-based systems, mines have an always-on positioning network that works if satellite signals are unavailable in the pit due to physical or man-made obstructions. Jps LocataLites can be permanently positioned on site or moved at will, ensuring a mine’s Jps Locata network can be set up where and when needed.
“We all rely on electricity from public sources, but in areas where outages occur companies invest in backup generators,” said Nunzio Gambale, CEO and co-founder of Locata. “It’s exactly the same scenario for mining companies, where they are dependent on GPS. Locata gives you a GPS backup ‘generator’ – a world-first capability which is clearly a game-changer for the whole industry. Before Locata became available mines simply had to suffer through a slow-down when GPS-based systems became flaky. Leica Geosystems had the vision early on to recognize the enormous benefits provided by our technology advancements. They threw their corporate weight behind intensive product development, carefully integrating Locata technology into their world-first Jigsaw mining solutions. It’s a marriage made in heaven, and Jps customers will be the ones who really reap the rewards of Leica’s outstanding first-mover effort. There won’t be any ‘GPS doesn’t work here’ excuses in the future.”
John Carr, senior technical specialist at Newmont Boddington Gold Mine, puts it this way: “Look, it’s really this simple. If Locata had not invented the technology to help fix the GPS issues in a deep pit scenario I may as well have gone back home, started breeding pit ponies and sharpened up the picks and shovels… Open Cut Mines, just like everyone else that depends heavily on satellite navigation, are already hitting the wall at the outer limits of GPS technology. With Locata, we’ve virtually eliminated everyday GNSS signal challenges. And now we also have our own backup in place in case of a more significant or longer-term failure.”
Locata Corporation has announced that U.S. Air Force (USAF) veteran Paul Benshoof, formerly chief of strategic development at the 746th Test Squadron at Holloman Air Force Base, New Mexico, has joined the company as global business development manager for military and government applications in the U.S. and abroad.
This team expansion primes the company to meet growing global demand for GPS backup for critical government, civilian, and commercial infrastructure, Locata said. Benshoof, who witnessed the success of Locata’s precision positioning in GPS-denied environments during USAF LocataNet development at White Sands Missile Range, will set and execute the company’s worldwide defense sales initiatives.
Near universal reliance on GPS for a broad range of critical positioning and navigation requirements in military, civilian government, and commercial applications — despite the fact that GPS signals are frequently blocked, jammed, spoofed or unavailable — is driving increasing demand for an alternative positioning solution. Locata’s terrestrial technology is the first and only system to locally replicate GPS precise positioning — on the ground. Locata is therefore the only real “backup to GPS” across any area where satellite-based signals aren’t reliable. Many modern applications (such as machine automation, military operations in GPS jammed areas, and all manner of positioning across campuses, ports, downtown “urban canyons,” open-cut mines, warehouses, malls and more) have far outstripped the original design parameters of the GPS satellite constellation. The ability to provide a backup to GPS is therefore now recognized as an essential national requirement for future mobile, industrial, transportation, homeland security and other critical infrastructure applications, as clearly laid out in the 2010 Federal Radionavigation Plan and the U.S. President’s National Space Policy of the USA.
On September 7, the USAF granted Locata a multi-year contract to install a LocataNet over a vast 2,500 square mile (6,500 sq km) area of the famed White Sands Missile Range. The LocataNet has been described in a current USAF technical report as the key component for the realization of the USAF’s new “gold standard” military-grade reference system required to test and evaluate future navigation and guidance systems for the U.S. Department of Defense when GPS signals are jammed or unavailable. Locata has been proven by independent USAF testing to be fully autonomous from GPS, delivering the same or better positioning, navigation and time (PNT) as the GPS satellite constellation. Locata has invented a large portfolio of new technologies to create this new capability. Locata currently has 94 granted patents and over one hundred more in process to protect their innovations.
“It’s an honor to have Mr. Benshoof join our team,” said Nunzio Gambale, CEO and co-founder of Locata. “Paul’s caliber of GPS expertise and firsthand experience with military and government positioning requirements will be instrumental in helping grow our business in this sector. He will help military and government organizations meet next-generation positioning needs using Locata’s world-first backup to GPS. I’ve known and worked with him and his USAF team since 2005, so he’s seen Locata’s groundbreaking technology in action. The fact he has now chosen to join our company is a tribute to the importance of our emerging technology. It also tells you all you need to know about how well our ‘impossible technology’ actually works!”
Benshoof began his 22 years in GPS as the Project Manager responsible for the development and procurement of the PLGR — the DoD’s first secure handheld GPS receiver, manufactured by Rockwell Collins. He then devoted his technical prowess to developing navigation warfare (NAVWAR) test assets to support advanced technology demonstrations in GPS-denied environments, as well as supervising international test programs for NATO and allied forces. As GPS testing became increasingly important, he formed and directed the GPS Test Center of Expertise, a consortium of U.S. test agencies dedicated to GPS test and evaluation, while also chairing an international working group that helped standardize GPS test practices among 11 participating countries. Ultimately, he was selected to implement and lead the 746th Test Squadron’s Strategic Development activity that worked with commercial and military GPS industry to project guidance, navigation and NAVWAR testing shortfalls, and then managed developmental programs to fill technical capability gaps.
“I’m excited to join a company that has done what no one thought was possible,” said Benshoof. “While other companies have attempted to replicate GPS without satellites, Locata is the first to succeed. Just as the early days of GPS were sparked by groundbreaking military applications, Locata has followed this same evolutionary path, yet much more rapidly. I’m honored to be a part of the team bringing essential GPS backup to the countless nations, organizations and partners that need it.”
Leica Geosystems Mining and Locata Corporation have announced the extension of their technology partnership in the Mine Machine Automation and Mine Fleet Management Market until June 30, 2014. The extension guarantees the ongoing, commercial provision to the global mining industry of the Leica Jigsaw Positioning System (Jps), powered by Locata technology.
The continuance of the technology partnership between Leica Geosystems Mining and Locata Corporation comes on the back of a huge body of work, which has resulted in the first successful operational deployment of the Leica Jps network. The technology at the core of the Leica Jps is a combination of the “Local Constellation” (pioneered by Locata Corporation and adopted by the U.S. Air Force) and Leica Geosystems’ technology portfolio.
The co-developed Leica Jps network is a high-precision solution that augments standard RTK GPS/GLONASS signals with Locata signals, ensuring no positioning signal loss or machine down time, even against high walls or in the deepest open pit mines, Leica said.
“It is with great pleasure that we officially announce our continued alliance with Locata Corporation,” said Haydn Roberts, CEO, Leica Geosystems Mining. “Through this partnership, the Jigsaw Positioning System (Jps) will continue to meet and exceed industry expectations. In being available to augment any GPS/GNSS network on any site, we are truly providing a new capability for mining applications, enabling them to operate with unprecedented signal up time and benefit from the huge associated financial return. And we know it works — we have the data.”
“Through Jps we offer autonomy from sole reliance on satellite-based positioning networks," Roberts said. "In accordance with Leica Geosystems Mining strategy, our technology for machine automation and now HP RTK positioning is completely OEM independent. No longer will machines stop work while waiting for the elusive satellite signal to reconnect. The Jps will seamlessly augment the signals, no matter on what machine, on what system, in what fleet.”
Nunzio Gambale, CEO and co-founder of Locata Corporation, said, “Locata is truly delighted to extend, for a further two years, the global exclusive rights Leica Geosystems has to integrate and sell our revolutionary technology into the mining market. They deserve this extension. Mr. Haydn Roberts runs a team that is talented, experienced and motivated. They have proven to us many times over that they are some of the finest GPS engineers in the world.”
The success of the combined technologies and continued relationship between both parties ensures the Leica Jigsaw Positioning System will be commercially available to the mining industry globally from August this year.
“This Leica-Locata relationship has blossomed over what is now many years of cooperation, and it is one which we value highly,” said Gambale. “The Locata team is proud to be partnering with such a respected and incredibly innovative company.”
“GPS can no longer evolve fast enough. Satellite-based systems cannot maintain the speed of development now required for the hyper-fast evolutionary pace of modern applications and devices. For positioning for the future, it has become exceedingly clear that GPS now needs a terrestrial component.” — from a Locata Corporation prospectus
A large number of companies and engineers have thrown billions of dollars at trying to improve GPS in urban and indoor applications,” states Locata Corporation co-founder Nunzio Gambale. “From a technological perspective, Locata has created something completely new: the capability to autonomously create a GPS-style system on the ground.”
Members of the GNSS community can see for themselves at Locata’s coming-out party at ION-GNSS 2011, including release of a Locata signal interface control document (ICD). GPS World took an advance look at the technology in a June trial of the demo that all ION attendees can see. This article presents these reports, after an outline of the technology.
The key to Locata’s positioning system is the signal generated by the Locata transceiver, or LocataLite, to synchronize its time to other LocataLites in a network. Locata creates a network that, according to the company, “is in almost perfect synchronization” without using atomic clocks. Each transmitter dynamically synchronizes with other Locata transmitters using a patented method called Time-Loc. Gambale says that a Locata network currently locks to about 2 nanoseconds.
Each LocataLite base station has an uninterrupted range of approximately 10 kilometers, with indoor signal penetration similar to that of a mobile phone tower.
The company emphasizes that its transceivers are not pseudolites, but devices that create TimeLoc synchronization, and thereby enable an autonomous synchronized network that, locally, looks like GPS. The local constellation is under local control, and can therefore be designed for deployment at any power, any frequency, or any density required by an application.
The networks can scale easily. The term “local” can mean a room or warehouse (100s of m2), a campus or open-cut mine (10s of km2), an airport terminal area with approach and landing routes (100s of km2), or a wide area, range, or city (1,000s of km2)
Gambale sees markets for Locata’s technology in defense, mining, emergency services, construction, and security. Locata is designed to integrate with existing GPS technology, as simply another constellation. This means an approprieate GPS-Locata receiver can use the satellite signal when outside the range of a Locata network. To a combined GPS-Locata chip, the LocataLite will appear as another satellite.
The company sold its first Locata network in July 2005. Locata has signed partnership agreements of various kinds with Leica Geosystems and Newmont Corporation (mining), the U.S. Air Force, the Advanced Navigation Technology Center of the Air Force Institute of Technology, and several other firms under non-disclosure terms. There was an initial test deployment at Holloman Air Force Base in May 2008, as a truth reference system spanning a test area of about 52 by 15 kilometers.
For high-multipath environments such as indoors and warehousing, the company’s latest development is a new antenna called a TimeTenna, which it will demonstrate at ION-GNSS.
Future research and development will focus on the miniaturization of the Locata receiver. Work has begun on a combined GPS-GLONASS-Locata chip that can be integrated initially into professional and industrial devices, and eventually into consumer devices such as mobile phones.
Locata plans to work with integrators only, not with end users, making the technology available to qualified partners developing receivers and applications. The ICD is the first step in Locata’s technology rollout.
LocataLites awaiting boards. Each LocataLite transmits four PRN signals.
A Long Time Coming
Eric Gakstatter, Survey editor
You may have heard the Locata name pop up over the past several years. It would be in the news, then back underground into stealth mode. About five years ago, I heard some interesting rumors about its technology but I decided not to take them seriously until I saw some real products.
Two years ago, I sat down with Nunzio Gambale, Locata CEO, at the ION-GNSS conference. At last year’s ION, I talked with him again. At that point, I understood the potential impact of Locata’s technology — if it worked as advertised. I again told myself that before I spent more time on it, I wanted to see a product introduced to the market based on Locata technology. In January of this year, it happened.
Leica Geosystems introduced its terrestrial GPS Augmentation Network for the mining industry, based on Locata technology. To me, that was a pivotal point. Leica is a reputable company and wouldn’t introduce a product without a thorough vetting.
I contacted Nunzio and we had further discussions. I wanted to see the technology in action — hard to do since Locata is based in Australia, I’m in Portland, Oregon, and an early installation occurred in South Africa. Fortunately, the company’s need to do a real run-through of its demo on site, prior to ION, meant that I got what I wanted to see, right on my doorstep: a Locata preview at the Oregon Convention Center in June.
The Technology
Essentially, Locata has developed a system that is very much GPS-like in that one has a network of reference stations (LocataLites) that interface to an unlimited number of rovers. One major difference is that there is no space segment. It doesn’t need or use satellites. Essentially, each reference station behaves like a satellite on the ground, with the rover moving around inside the polygon formed by the reference stations. The rover position is accurate to the centimeter level.
The value of the Locata receivers is that they don’t need a clear view of the sky to operate like a GPS receiver does. Yes, that means centimeter-level positioning indoors, where RTK GPS doesn’t work due to satellite visibility constraints, as well as outdoors.
Sound cool? It is. I saw it working indoors at the Oregon Convention Center. Locata staff set up a large room with Locata reference stations around the perimeter. They had two different rovers: one mounted on a small push cart and the other on a golf cart. We were able to move the rovers around the room freely and view the updated coordinates at 1 Hz intervals (although it’s capable of much faster update rates).
The Challenges
The new TimeTenna (see facing page) is large. Today that form factor is required to handle the high-multipath indoor environment. Locata is working on a scaled-down version, although it’s not unreasonable to envision the current model being mounted on a forklift or other vehicle if it was mechanically hardened. The antenna for Locata’s outdoor systems (for mining and other less hostile environments) is much lower profile and similar to a standard GPS antenna.
The Locata system requires that you manage a network of Locata reference stations. Similar to an RTK network, the Locata system is based on a network of reference stations around the project area. The baseline distances can be quite long (tens of miles), but nevertheless, one must install and manage the network much as one would a GPS RTK network, albeit with much less IT department involvement than a GPS RTK network.
Lastly, Nunzio Gambale wholeheartedly agrees that Locata’s technology is still developing. He likens it
to where GPS was in 1990. I tend to agree. The antenna technology needs to reduce in size and the system architecture needs to be vetted for reliability in production environments. But keep in mind that Leica and the U.S. Air Force’s 746 Test Squadron have already bought into Locata’s technology in a big way.
Although I don’t pretend to have the technical understanding that some of the others in the room possessed during the June demo, I did hear one of the sharper engineers exclaim “genius” at one point, referring to the design.
It’s certainly worth a close look as Locata’s technology continues to develop and be deployed. I think the day isn’t far away when we will see a system from Locata that will allow a user to transition seamlessly from centimeter-level positioning outdoors using RTK GPS to centimeter-level positioning indoors without breaking a step.
Now I’m a Believer
Tony Murfin, Professional OEM editor
I was invited to Portland in late June to preview an operational system which promises to help GPS in tough signal situations and work well indoors. While Europe, China, India, Japan, and of course Russia are all working to get more operational satellites in space, Locata in Australia has quietly been perfecting its terrestrial navigation system. I say perfecting because skeptics and naysayers have criticized Locata and what was seen as a pseudolite system with a rather lengthy development cycle. But nothing speaks as loudly as an operational system adopted and fielded by Leica Geosystems or a contract with the U.S. Air Force to get people’s attention back in the right place, even though Locata would claim it is only just getting started.
As I walked into the Portland Convention Center I was certainly apprehensive as to how any GPS-like system could function well within the massive concrete and steel building. When I found the smiling Locata group tucked away in one of the side ballrooms, it didn’t take long before I became a believer. Those wall dividers that allow the Convention Center to reconfigure rooms are apparently referred to as Acousti-Seal 931 Steel Operable Wall panels — yep, perfect multipath reflectors. So to see totally repeatable few centimeter positions in this cavern was not what I was anticipating.
The ballroom’s carpeted floor had been carefully laser-surveyed with a matrix of 5-meter squares, with a high-precision dot marking each grid intersection. LocataLite stations were set up at each corner and one in the middle at the far end, each with three antennas. A master station at the left corner of the entry wall originated the TimeLoc signal, and on each station one antenna pointed to an adjacent station, over which TimeLoc synchronization was cascaded around the network. This is a key feature of the ground network, allowing it to become fully synchronized and also to be extended or reconfigured at will.
Of course, when you run your own ground network it helps to be able to run at power levels significantly higher than GPS, so it’s easy for each station to communicate with another, provided they roughly have line-of-sight of each other — kind of like having to actually see a GPS satellite to get it into your GPS position solution. If you have some buildings or bushes or trees to contend with, having higher power available makes things easier, especially if you want an RTK carrier solution.
The secret to working indoors appears to be the TimeTenna phased-array antenna that Locata demonstrated in the steel-clad ballroom. With this top-hat-like antenna mounted on a wheeled cart along with a receiver and laptop, and positioned over one of those surveyed locations on the carpet, we could easily see that positions within less than 5 centimeters were consistent and solid. As a truth system, the company also had a motorized laser scanner pumping out centimeter-level positions on a parallel measurement system, and it was clear that there was excellent centimeter-level correlation.
But don’t take my word for it. Come to Portland for the ION-GNSS conference, September 20–23, and see the Locata demo for yourself — you’ll be impressed too!
Then there is the sole-source U.S. Air Force contract that has Locata updating an existing network to provide independent reference positions over 2,500 square miles of the White Sands Missile Range in New Mexico. The Air Force apparently needs to know how its navigation systems work when it turns on localized GPS jamming. The Locata system is designed to give the Air Force better than the specified <18-centimeter position accuracy in GPS-denied environments.
In August, Locata cleared the final USAF critical design review milestone for the wide-area White Sands Missile Range deployment. This is clearly a good sign that Air Force wants to continue with the next-generation Locata system. With GPS denied on this range, test vehicles will likely be constrained to inertial-only navigation, but with a LocataLite receiver onboard pumping out high-accuracy position measurements, the Air Force will no doubt have plenty of location data to track dynamic performance under GPS jamming conditions.
Another application that Locata has been investigating involves airborne trials in Australia, where initial results indicate position accuracy of less than 3 meters at up to 50 kilometers. The trials have involved a ground network with six base stations spread over a roughly square area of 1,500 square kilometers.
A University of New South Wales test aircraft equipped with precision GPS, inertial reference system, and laser scanner for truth reference use flew to within 3 to 49 kilometers of the reference stations at around 7,000 feet, producing the reported <3-meter code solution. Trials data is still being analyzed to produce a higher accuracy carrier solution, and Locata expects to issue these results at ION.
Airborne Reference Equipment
Leica has apparently been working with Locata for some time. The proof-of-concept installation at a 300-foot deep diamond mine in South Africa and a production set-up at a gold mine in Western Australia are going strong.
The gold-mine installation has now been extended to two pit sites using 15 LocataLite transmitters in total. LocataLite receivers are mounted on vehicles, atop drills and shovels, and all run off the multi-pit Locata network. The mobile units not only carry LocataLite receivers, but also precision Leica GNSS receivers running off side-by-side antennas. As time progresses, the ultimate solution will use integrated multi-constellation/LocataLite receivers: the Locata signals integrated into a combined satellite+terrestrial receiver position solution, using a single integrated antenna.
It’s easy to envisage such an integrated receiver and antenna where the Locata ground-network signals are used as just another local constellation. The investment to get to such a receiver would of course have to be justified by a whole proliferation of Locata networks. This would seem to be on the way, given the significant progress that Locata has now unveiled.
Will It Fly — Literally?
William Shears, aviation engineer
If you are an aviation satellite navigation enthusiast, you probably noticed this hasn’t been an auspicious year for aviation GNSS or for GNSS applied to any other user segment that needs highly reliable GNSS service. Between personal privacy jammers, instances of accidental interference, and the big chill sent through the community by the LightSquared debacle, many are asking if GNSS is now or ever will be reliable enough to be a sole means of position and time for safety-of-life applications.
A few years ago, the very idea that ordinary people would want to own GPS jamming devices and that they would be easily obtainable on the Internet would have been considered absurd. Similarly, the idea that the U.S. government would not vigorously protect GPS from interference was just not credible. But here we are in mid-2011 and the vulnerability of GNSS to interference has come home to roost, in several very big ways. This new awareness of the weaknesses of GNSS has led the U.S. Federal Aviation Administration (FAA) and civil aviation authorities of other countries to start rethinking their long-term strategies with respect to satellite navigation.
Even well before LightSquared crept into the consciousness of the GPS community and then burst forth as the apocalyptic specter that threatens to virtually end the utility of GPS in North America, the FAA had begun a study to consider the need for an alternate positioning, navigation, and timing (APNT) system to support critical aviation needs. The idea being that as the U.S. air traffic management system transitions to become increasingly dependent on management of traffic via four-dimensional trajectories, reversion to a non-trajectory based mode (for example, controllers vectoring aircraft as they do today) would become unfeasible. Hence, airplanes will need a very reliable source of 4D positioning and outages for any extended period of time due to interference, or anything else will be unacceptable. The FAA set about studying what level of performance would be required for a system intended to back up GNSS in the future. Other countries began to follow suit, and whereas the concept of an APNT was obscure a year and a half ago, it has become a significant point of discussion at the International Civil Aviation Administration (ICAO) as well as within various countries, including the United States, Australia, and several in Europe.
At first blush, the Locata system would seem to be a ready-made solution poised to fulfill aviation’s need for a GNSS backup system. In fact, acting as an independent backup (and/or an augmentation to) GNSS is one of the main motivations in Locata’s development. The technology seems to have promise in meeting the aviation community’s needs for an APNT. Locata is relatively mature technology that has demonstrated accuracies well in excess of what is required of an APNT meant to back up GNSS for enroute, terminal, and non-precision approach operations. Perhaps even precision approach and landing could be supported. Also, the system is very flexible, which suggests that service coverage could be tailored as needed around important airports. The system has significant redundancies built in, including multiple frequencies, multiple antennas for path diversity, and the ability for the network to reconfigure which LocataLite uses which other LocataLite for time synchronization.
Given this flexibility and redundancy, it should be possible to configure a system that provides highly reliable service where it is needed. Another major advantage of the Locata technology for aviation is the higher signal power level that comes from using terrestrial signals rather than signals from space. In theory, a Locata system would be more robust to interference than space-based GNSS signals.
Some people are indeed thinking about Locata for aviation use. Locata has conducted flight trials in Australia using a prototype demonstration network of six LocataLites covering an area of more than 1,500 square kilometers around Cooma airport in Australia. Locata has reported code positioning solutions of better than 3 meters at ranges up to 50 kilometers, and will present higher accuracy carrier-phase solutions at ION. The U.S. Air Force is also preparing to use Locata in an aviation environment as an independent truth reference.
At the ICAO Navigation Systems Panel (NSP) meeting in May 2011, the Australian panel member presented a paper outlining the general need for an APNT. The paper included a description of Locata as an example of what an APNT solution might look like. However, it is interesting that the paper fell short of proposing that the panel pursue Locata as the solution or to suggest that any standardization of a solution for APNT begin immediately. In spite of all the potential advantages discussed above, the Locata system faces a major obstacle before it can practically be used in aviation applications: standardization.
The first aspect of standardization that is likely to be a huge impediment for Locata (or any other APNT proposal, for that matter) is spectrum. The Locata systems implemented to date have been designed to operate in the 2.4 GHz unlicensed industrial applications band. For Locata to support safety-of-life applications, national aviation authorities will require that an APNT system use spectrum that is properly allocated for use in a safety-critical aeronautical navigation system, that is, spectrum allocated for Aeronautical Route Navigation Services (ARNS). Spectrum allocated as ARNS is afforded special protection from interference. Coordination of services in or near ARNS spectrum is often difficult, time-consuming, and expensive. For example, coordination between civil aviation use of the 108–118 MHz band (used for instrument landing systems, or ILS, and VHF omnidirectional range, or VOR) and FM broadcasting in the 88.1–107.9 MHz band produces real costs and restrictions to be borne by the FM broadcasters. Consequently, any proposal to convert non-ARNS allocated spectrum to ARNS is likely to be met with significant opposition.
Spectrum is a finite resource, and virtually all spectrum is already in use by someone. So, the reality is that a future APNT will likely have to be implemented in some existing ARNS spectrum, since a new global allocation of spectrum for ARNS is an unlikely proposition.
The current allocations for ARNS include:
108–118 MHz (ILS/VOR),
960–1215 MHz (DME/Mode-S/ADS-B/SSR/JTIDS/MIDS),
1556–1626 MHz, and
5.1–5.25 GHz.
All indications are that a Locata system could be could be operated at these frequencies. However, services that already exist in those bands will continue for the foreseeable future. So, to be viable, a Locata system would have to coexist in one of these bands with other existing systems, that is, not interfere with the operation of those other systems. Such coexistence has yet to be demonstrated either by analysis or test.
After suitable spectrum has been identified, the next major hurdle for Locata is standardization of the signal-in-space to the degree that supports interoperability of equipment produced by different manufacturers in different countries. The Locata ICD released at ION-GNSS 2011 is a good step in the right direction. But for an aviation application, a great deal more would need to be specified, including details about the waveform (spectral mask, out-of-band emissions, and so on), the protocols for producing the signals, and the standard protocols for the application of data to derive a position solution. A clear allocation of responsibility between the ground processing and airborne processing will need to be defined so that system integrity can be analyzed and assured.
At the international level, such standardization activities can take a decade or more. The length of time required depends on the maturity of the system that is proposed for standardization. The existence of a similar standard, with perhaps a significant user base and operational experience also helps (for example, an IEEE standard or RTCM standards). So, again, the ICD is a good start.
Beyond the technical aspects of standardization, there are political and institutional aspects that can often be more formidable barriers. Issues with spectrum have already been mentioned. Beyond that, there are issues with intellectual property. Creating aviation standards based on proprietary technology is unpopular although not unprecedented. Proposals for standardization are more likely to be successful the fewer strings, such as licensing agreements or fees, that are attached. This is a challenge since companies that have worked hard to develop cool new technology are often reticent to give away their intellectual property in the name of standardization.
Given all the barriers, how does new technology ever get implemented in civil aviation? Typically, applications begin in one of two ways:
in support of war.
in support non-safety related industrial applications.
The military has historically pioneered many technologies (radar, DME/TACAN, GPS) that would probably not have been developed otherwise. Even after the initial military experience, there is typically a period of time when the new technology is used in a non-safety-critical capacity to support some commercial objective. In the case of Locata, some potential applications would be flight-test position-reference systems, high-precision photogrammetry, high-precision positioning for crop dusting, and any other applications that require a highly robust, high-accuracy position solution in a well-defined region where interoperability and certification are not issues. Those are relatively small niche applications, which may provide some valuable operational experience.
However, serious movement towards adopting Locata as a standard for APNT is unlikely to happen without the support of at least a couple of large countries. Even a large user base with equipage does not guarantee that countries will adopt the technology or that air navigation service providers will authorize the use of the technology for safety-critical applications. For example, many carriers are equipping with broadband Internet equipment to provide service to the passenger cabin. Yet, there is no serious discussion of using that datalink capability for safety-related communications. Similarly, a very large number of aircraft are equipped with Aircraft Condition and Reporting System (ACARS) datalink, yet use of that system is largely limited to non-essential Airline Operational Communication (AOC) applications.
So will Locata fly? I believe that is entirely up to Locata and other companies that work with Locata to address the initial military and niche airborne positing markets. Operational experience gained by such early adopters will be critical in laying the groundwork for the support that will be needed from large states like the United States, Australia, China, and those in Europe, if Locata is to be a player in the longer-term international standardization of APNT.
In the near term, Locata is already serving the aviation community by demonstrating the art of the possible relative to what a ground-based navigation system based on modern technology could be.
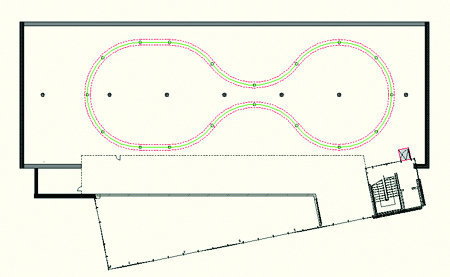
One-hundred-twenty meters of test track, designed for repeatable dynamic position testing, run along the roof of the new Nottingham Geospatial Building at the University of Nottingham, UK. The figure-eight track provides an optimal controlled environment with test equipment aboard a remote-controlled, multi-sensor 7¼-inch gauge locomotive platform with a top speed of 7 kilometers per hour, a dedicated power supply, and five antenna mounts. Simulation of the track using Spirent GSS8000 hardware (GPS and Galileo) provides additional planning and testing capacity.
The combination of these tools creates the ideal environment for our new project: augmentation of GNSS systems with ground-based Locata positioning technology. This pseudolite-like system, described in the March issue of GPS World, works in a GNSS-like fashion, using code and carrier phase. The major advantage, apart from utilization of the licensee-free 2.4 GHz frequency band, is the precise time synchronization of the network to the nanosecond level.
The proposed integration addresses Locata’s weak vertical coordinates (due to relative coplanarity of transceivers) and GNSS’s requirement for a clear view of the sky and location-specific weak geometric distribution of the satellites. Prior research and analysis suggests considerable improvement in 3D positioning accuracy when combining ground-based positioning devices (pseudolites) with GNSS, but the current project pushes the research forward by attempting to create on-the-fly ambiguity resolution.
Combination of hardware and software simulation has provided an initial assessment of the proposed integration, optimization of equipment location, and test of the mathematical model to be used. Practical tests, using the roof lab on top of the NGB, will further verify the method and allow comparisons between the predicted and real-life results. This will aid the assessment of noise, multipath, and in-bound interference. The test design minimizes the tropospheric effect, while track flexibility and repeatability offer the possibility of implementing and simulating obstructions and areas of GNSS outage. This will provide a full assessment of the mathematical model and the integrated system’s capacity.
This project offers new opportunities in civil engineering, specifically monitoring and machine control. GPS is currently widely used for those applications, with Locata also proven successful. The integrated solution can provide not only enhanced positioning capacity but lower the required number of visible GNSS satellites, and offer improved integrity and quality control, ultimately increasing the safety of life.
The intended utilization is for positioning in dense urban areas and essential structures (airports, seaports, factory sites, bridges) where sky visibility or correct satellite distribution cannot be guaranteed.
The track is available for other projects. Funded by East Midlands Development Agency, hosted by the Institute of Engineering Surveying and Space Geodesy, the Centre for Geospatial Science, and the GNSS Research and Applications Centre of Excellence (GRACE).






.")