With a speaker and four microphones, drones can echolocate like bats
Mathematicians at Purdue University in West Lafayette, Indiana, have found that drones can determine position with echolocation.
The signal-processing research has potential applications for people, underwater vehicles and even cars, said Mireille “Mimi” Boutin, a Purdue University associate professor of mathematics and electrical and computer engineering.
Boutin and Gregor Kemper, a professor of algorithmic algebra in the Department of Mathematics at the Technical University of Munich, have worked to reconstruct the wall configuration of rooms by using echoes picked up by microphones on the drone.
Mathematicians found a method to hear the shape of a room using four microphones mounted on a drone. Pictured: Mireille Boutin. (Photo: Purdue University)
When a microphone hears an echo, the time difference between the moment the sound was produced and the time it was heard is recorded. That time difference shows the distance traveled by the sound after bouncing on a wall — much like bats use echolocation to orient themselves with their surroundings.
The challenge is to determine which distance corresponds to which wall, a process called echosorting. Sorting the echoes accurately ensures that all the walls heard are truly there. This way, the algorithm used does not produce “ghost” walls.
The research is directly related to two complementary problems in engineering: localization (determining where you are in an environment) and mapping (determining the shape of your environment).
The research, which uses methods from commutative algebra, proves that it’s possible for a minimal setup of four microphones arranged in a non-planar shape, along with a loudspeaker emitting a singal signal, to reconstruct a room.
The microphones and loudspeaker could be mounted on a moving car, a robot navigating in an indoor environment, or an underwater vehicle exploring a wreck in the ocean. Some of these situations put restrictions on rotations and translations that can be applied to the microphone configuration. The impact of such restrictions on the reconstruction problem will also be studied in future work.
The next steps will be to consider other scenarios, such as when the movement of the drone is restricted, or when the drone listens to the echoes of consecutive sounds as it is moving.
Citation. “A Drone Can Hear the Shape of a Room,” by Mireille Boutin and Gregor Kemper, SIAM Journal on Applied Algebra and Geometry, 4(1), 123–140, Published online Feb. 6, 2020, https://doi.org/10.1137/19M1248534.
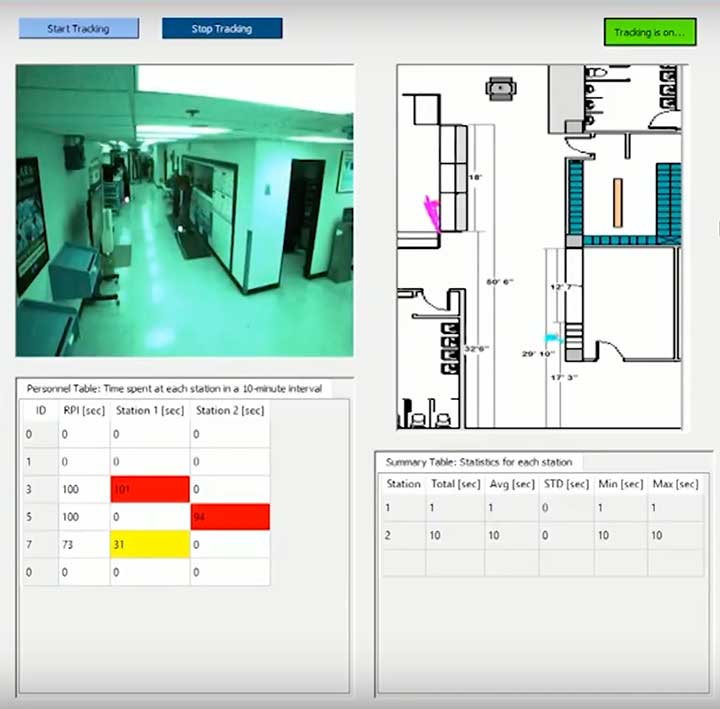
The dashboard shows how Ubihere tracks with both camera and tag technology. (Screenshot: Ohio Development Services Agency)
Ubihere has introduced a new 2D and 3D tracking technology for indoor and outdoor positioning.
Ubihere’s patented technology provides real-time asset location and information without GPS, making it an alternative for GPS-denied environments.
From Space Walks to Retail Stores
The inventor of the technology is geoinformatics professor Alper Yilmaz of The Ohio State University (OSU), who researched how to geolocate undercover officers based on motion video information, as well as astronauts on space walks.
OSU urged Yilmaz to commercialize his technology, and Rev1 Ventures served as the incubator. Ubihere launched under Rev1’s portfolio in 2016 in Columbus, Ohio.
Ubihere’s system is based on anonymous video analysis positioning technology, which is patented from OSU, coupled with tag technology and advanced machine learning analytics. The system’s tags, cameras, and software track assets to the centimeter. The assets are monitored through an anonymous video feed or the tags themselves, which are about the size of a credit card, and non-RFID.
The map for indoor environments can be generated from a building information model (BIM). Based on the building’s architecture, movement is tracked. In milliseconds it can hone in on an exact location within a centimeter, explained Alice Hilliard, Ubihere’s vice president of business development.
The location data is transmitted to a server or the cloud, depending on the customer’s preference. It is then loaded into dashboards that can be accessed from any device the client requests.
If a tagged object leaves a building, it will continue to be tracked with or without GPS. If the object stays within the building, it will never use GPS. Using GPS shortens the battery life, which ranges from 18 to 24 months. Battery life is also affected by the number of floors, temperature and usage.
Launching in Hospitals and Retail Stores
The tag offers a way to calibrate location in places such as hospitals, where tracking food carts or devices through lead-lined walls enables hospitals to maximize their efficiency.
“Imagine how many times a nurse or other caregivers go back and forth,” Hilliard said. “By tracking how people and objects move around, we can help departments figure out opportunities to lay out the floor better to allow the staff to save time and steps.
“With a blueprint loaded into the software,” Hilliard said, “the system knows whether a (tagged) IV pump went down the hall, turned left or right, entered an elevator, or was left in a patient’s room.”
The cameras can be installed in locations such as retail stores, enabling Ubihere to anonymously track a customer’s journey. Used together, the tag and camera can help stores determine whether a display is working, showing how many customers came in to shop, or how many looked at or touched items in a particular display.
For ecommerce, customer behavior can be tracked automatically in real time with Google Analytics and other SEO tools.
Other possible uses include factories and emergency-response teams. “If you were in a factory or even a nuclear power plant, OSHA guidelines establish that you have to have two people in the control room at all times,” explained Hilliard.
“Periodically, OSHA is required to monitor if the power plant is following that protocol. Instead of having someone sit there and oversee the situation, we can use our camera technology to anonymously collect workers’ whereabouts, which can then be easily pulled from the cloud. For response teams, an equipment failure that makes it difficult to locate a team member could be overcome with the tag technology. “
Ubihere’s machine-based algorithms can learn locations based on various types of sensors, Yilmaz said, adding that detecting odors isn’t out of the question.
The startup is now exploring potential applications of its GPS-free tracking technology. While initially focusing on beta tests in hospital and retail environments, Ubihere also has three projects with the U.S. Department of Defense.
The importance of sensors, whether they be incorporated in cute dog robots or autonomous vehicles, is gaining more traction.
At September’s Custom Electronic Design and Installation Association (CEDIA) Expo, Sony Electronics President and COO Mike Fasulo told GPS World that its foundation sensors are going into autonomous vehicles, drones, agricultural solutions and other platforms.
“A lot of people also don’t know that more than half of the hardware in most smartphones is ours,” Fasulo said. “These sensors we are working on do things you and I can’t do. They can assess sunlight and darkness. They can put a safety cocoon around a vehicle.”
The Aibo robot dog uses artificial intelligence to mimic a real puppy’s behavior. (Photo: Kevin Dennehy)
At the conference, Sony displayed a nearly $3,000 Aibo dog robot, which has many of the same sensors that go into many of the company’s other products, including its venerable camera line. Aibo has facial recognition technology and uses artificial intelligence to mimic a real puppy’s behavior.
Sony sensors seem to be a cornerstone in several new announcements. Less than two months ago, Sony and Yamaha Motor Co. announced the joint development of the SC-1 Sociable Cart, a small autonomous vehicle that will be deployed to golf courses, amusement parks and commercial facilities, the company said.
The SC-1, which is not for sale, features five seats, replaceable batteries, front and rear scope of view thanks to image sensors, an innovative vehicle design, and other improvements over an original prototype vehicle.
In addition to the image sensors, the vehicle has ultrasonic sensors and a two-dimensional laser detection and ranging (lidar) system, the company said. These sensors allow the vehicle to gather cloud travel data for safe-driving analysis.
Sony is working with Japan’s NTT Docomo to test the vehicle’s 5G mobile technologies for remote-controlled functions, the company said.
Geotab leverages sensor data
Sony and Yamaha Motor plan to roll out the SC-1 later this year in Japan. (Photo: Sony/Yamaha Motor)
Canada-based Geotab has made big announcements this year, although the huge one is from the U.S. government to equip more than 200,000 vehicles with its telematics systems.
While that contract itself is massive, the company believes the more than 2 billion data points gathered each day, from millions of Geotab-equipped vehicles on the road, is the real valuable commodity.
The data gathered with the company’s connected-car technology can help companies and governments assess how their fleets are operating, said Mike Branch, Geotab vice president of data and analytics.
Branch, who leads a team of 40 employees, said the company uses the data to help cities assess road impediments — not only road quality. This includes analyzing ABS activation to look at black ice or other hazards. “While weather companies can only estimate conditions, we have sensors in vehicles that can give hyperlocal reports and ground truth,” he said. “People consistently slamming on their brakes in one area is an example [of aggregative data].”
Back in the day, which is less than 10 years ago, all that many companies expected from their fleet management systems was to let them know where their drivers were, by using GNSS and mapping technology. Today, the sensors — and data provided by them — allow managers to assess dangerous driving areas, save on fuel costs by rerouting trucks and compare routes throughout the United States, not just in big cities, Branch said.
In the smart cities space, Branch said that Geotab is working with municipalities for fuel intersection insight mapping. “This means if 20 vehicles, or even just two, are stopped at an intersection, our sensors can detect the wait times,” he said. “The big thing for us is looking at this smart-city deployment to leverage organic data in a private manner.”
Because of the nature of data procurement, privacy is big topic for the company, Branch said. “We treat it with high importance. Our view is that the data is owned by the customer,” he said. “They have full access to it. We will go through it, aggregately, so we can improve our customer’s experience.”
Keeping OBD port secure
The future of open on-board diagnostic (OBD) vehicles — and procuring secured and open data from them — is a concern for Geotab, Branch said.
“We have a full port safety committee with the goal of security and access to the port,” he said. “We believe in open access to this port. This gets to be a concern with mixed-fleet Fords, Mercedes, BMW and others as the data can slow down the port at any time.”
Branch said the company does not want to remove the entrepreneur, who is interested in working with the port in a safe manner. “We work with the OEMs on the future of telematics not just by pulling the data from our device, but pulling it from their feed,” he said.
Branch said that technology may make the port dongle obsolete in five to 10 years, but until then, the company has created an ecosystem to enable the use of the data. “There is going to be an aftermarket as cars are lasting an average of 11 years,” he said.
Mothers Against Drunk Driving (MADD) has partnered with Velodyne Lidar, a provider of real-time 3D perception systems for a range of commercial applications, including autonomous vehicles. The initiative includes a website on the safety benefits of autonomous vehicle technology (see velodynelidar.com/madd-partnership.html) and an October conference on autonomous safety.
“We have learned that technology is essential to getting us to our goal of zero deaths caused by drunk driving,” said MADD President Helen Witty. “Autonomous vehicle technology holds the incredible promise of helping us eliminate drunk driving.”
The summit is designed to advance understanding of the safety benefits that can be achieved with autonomous vehicle technology. It is designed for business, government, public safety and community leaders. Attendees will have the opportunity to ride in autonomous vehicles.
Marta Hall, Velodyne Lidar’s president and chief business development officer, added, “Our goal is to design, develop and mass-produce lower cost lidar sold for every model of car and truck.”
The two organizations partnered in 2018 to create the website with information on how autonomous vehicles can help prevent roadway collisions. The site explains the basics of autonomous driving in easy-to-understand language for all audiences. Content modules include “Lidar 101,” explaining how lidar sensor technology is an essential component of self-driving vehicles.
A 3D lidar sensor such as the Velodyne Alpha Puck can deliver information to help enable vehicle autonomy and advanced driver-assistance systems. (Image: Velodyne)
“The promise of safe, self-driving cars is very exciting, particularly for those of us who have seen the devastation that impaired driving and human error can bring,” said former MADD President Colleen Sheehey-Church.
Puck Sensor. The Velodyne Alpha Puck is a lidar sensor specifically made for autonomous driving and advanced vehicle safety at highway speeds. In a session at July’s Automated Vehicle Symposium, company speakers presented “High-Definition 3D Lidars: An Integral Part of Future Autonomous Driving,” including use cases that have proven elusive for solutions based on camera and radar; and “State of Solid-State 3D Lidar,” a technical presentation on application-specific integrated circuits (ASICs).
“Core lidar electronics are moving from a printed circuit board to an ASIC, which provides advantages such as higher density, lower cost and improved reliability,” said UAV and Robotics Business Manager Frank Bertini. “The trend roughly follows Moore’s Law, leading to dramatic decreases in size, weight and cost over relatively short time periods.”
The RealSense camera uses two fisheye lenses and an IMU to construct location awareness. (Photo: Intel)
The Intel RealSense Tracking Camera T265, designed for positioning and maneuvering mobile robots and other portable systems, includes an inertial measurement unit (IMU) that enables developers to create solutions with advanced depth-sensing and tracking capabilities. Intel introduced the camera in Q1 of 2019. An earlier model, the D435i, also includes an IMU but is a depth camera, not a tracking camera.
As robots, drones and other autonomous mobile devices must — eventually — interact independently and intelligently with their environments, they must track their locations as they move, navigating unfamiliar spaces while discovering, monitoring and avoiding still and moving obstacles in real time.
Block diagram of camera components. (Image: Intel)
Moving toward that goal, the T265 includes two fisheye lens sensors, an IMU and an Intel Movidius Myriad 2 video processing unit (VPU), a system-on-chip component for image processing and computer vision at very high performance per watt.
Vision-based simultaneous localization and mapping (V‑SLAM) algorithms run directly on the VPU with very low latency. The T265 has demonstrated less than 1% closed-loop drift under intended use conditions. It also offers sub 6 ms latency between movement and reflection of movement in the pose.
The RealSense device measures 1 x 0.5 x 4 inches (108 mm x 24.5 mm x 12.5 mm), weighs around two ounces (55 g), and draws 1.5 watts to operate the entire system, including the cameras, IMU and VPU. Its spatial sensing and tracking capabilities are based on technology developed by RealityCap, acquired by Intel in 2015.
The camera performs inside-out tracking: it does not depend on external sensors to understand its environment. Tracking is based on information gathered from the two fisheye cameras, each with a 163-degree range of view (±5 degrees) and capturing images at 30 frames per second. The wide field of view from each sensor keeps points of reference visible to the system for a relatively long time, even if moving quickly.
Visual-Inertial Odometry. A key strength of visual-inertial odometry is that the sensors complement each other. The images from the camera are supplemented by data from the onboard IMU, which includes a gyroscope and accelerometer. The aggregated data from these sensors is fed into the SLAM algorithms.
The algorithm identifies sets of salient features in the environment, such as a corner of a room or object that can be recognized over time to infer the device’s changing position relative to those points.
The visual information prevents long-term drift from the inertial that degrades position accuracy. The IMU operates at a higher frequency than the cameras, allowing for quicker response and recognition by the algorithm to changes in the device’s position. A map of visual features and their positions is built up over time. In re-localization, the camera uses the features it has seen before to recognize when it has returned to a familiar place. The camera can locate its point of origin with an error margin of less than one percent.
Drone testing demonstrated that, in both cases, the tracking and position data generated by the peripheral was closely correlated with what was provided by GPS. This supports the viability of using it for navigation in areas where GPS is not available, such as under a bridge or inside an industrial structure.
Scientists continue to search for new technologies to serve the PNT mission. One novel way to augment GPS comes from a newly developed technology involving a quantum magnetometer.
Researchers at Lockheed Martin call it Dark Ice; it uses magnetic sensing as an alternative means of determining location without use of satellite signals.
Mike DiMario and his team have developed a prototype magnetometer that uses a synthetic diamond the size of a salt crystal to measure the direction and strength of nearly imperceptible magnetic field anomalies. They overlay that data with maps of Earth’s magnetic field, supplied by the National Oceanic and Atmospheric Association, to produce precise location information.
Special quantum-level impurities in the molecular structure of the diamond, where intermittently a carbon atom drops out and its neighbor is a nitrogen atom, enable the detection of magnetic field waves. These nitrogen vacancy (NV) centers are hyper-sensitive magnetic sensors. When illuminated by a laser, the diamond emits more or less light depending on the surrounding magnetic field’s strength.
The Dark Ice quantum magnetometer measures about 31 centimeters in length. (Image: Lockheed Martin)
Position + Direction. Dark Ice differs from current magnetic sensors aboard ships and planes in that it can measure both the field strength and the direction the field is pointing. “The real advantage of this quantum-based technology is its ability to produce a true magnetic field vector, while at the same time having a very large dynamic range and bandwidth,” DiMario explained.
Project development “was like peeling an onion: with each new layer removed, the team advanced. We had no idea of the expected outcome, other than what system modeling, the laws of physics and good engineering could predict. There was always something we could not have predicted or even thought of.”
In addition to developing this navigational capability, the team has also demonstrated that Dark Ice can harness Earth’s magnetic field to transmit communications across barriers intended to block all traditional signals, and track moving vehicles in real time.
Unjammable. “This project was designed for times when extenuating circumstances might prohibit your use of traditional GPS signals, and you need something that is unjammable, passive and always available. The Earth’s magnetic field meets this description if we can adequately sense and make use of it,” DiMario said.
He wants to downsize Dark Ice to hockey-puck size for convenient use on multiple platforms. “In real-world conditions, if I can get within 200 meters of GPS accuracy, that would be a huge success,” he claimed. Such precision would serve as a backup or verification to GPS, not a sole-means navigation system.
With its powerful sensing capabilities and small size, Dark Ice could function as the most reliable way to do things like identify hard-to-find watercraft in search-and-rescue missions and fly aboard aircraft in the battlefield. Navigation, search and communications — all in one compact sensor.
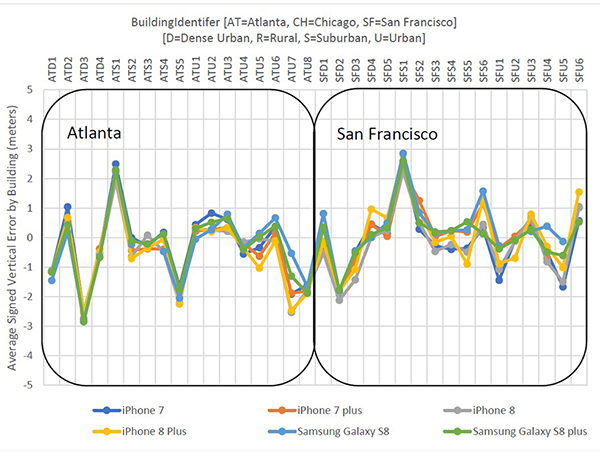
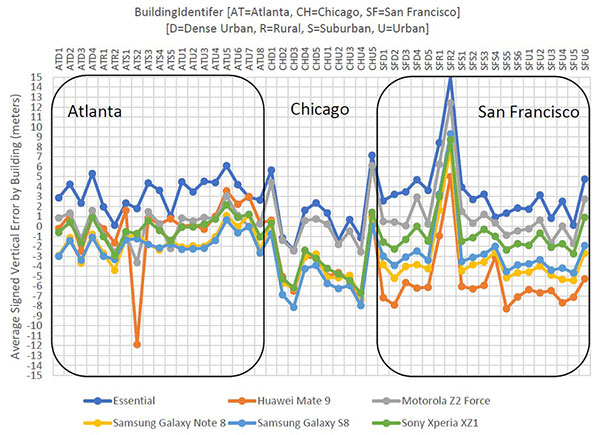
NextNav Results: Vertical accuracy delivered by various phone models using signals from an installed network of NextNav beacons. (Plots: NextNav, from ex parte FCC filing, Aug. 8)
According to NextNav, its altitude service delivered floor-level accuracy in 94 percent of test calls in recent blind industry tests commissioned by the Cellular Telephone Industry Association.
The Stage Z Tests were designed to develop a proposed Z-axis (vertical) metric for indoor wireless 9-1-1 calls, as required by the Federal Communications Commission (FCC).
NextNav’s Metropolitan Beacon System (MBS)-based services enable mobile phones and other devices to reliably determine their location and timing in indoor and urban environments where GPS signals cannot be received, the company said. NextNav’s 3D location services include accurate horizontal positioning, floor-level altitude precision, and context and visualization applications.
Polaris Results: Vertical accuracy (Plots: Next Nav, from ex party FCC filing, Aug. 9)
Delivered over a managed network on the licensed spectrum with carrier-grade dependability and metropolitan-wide coverage, NextNav’s services are designed for public safety applications, E911 and critical infrastructure as well as the multitude of consumer, internet of things and commercial applications that require reliable indoor 3D location or precision timing.
According to NextNav, the Stage Z Tests evaluated the ability of various technologies to accurately locate mobile 911 callers in the vertical dimension in challenging indoor environments spread across an entire metropolitan area. The tests were conducted using popular off-the-shelf iOS and Android devices running a software client provided by NextNav. The tests included more than 70,000 emergency-style calls generating altitude fixes from more than 200 different test locations.
“Our ability to deliver floor-level height accuracy has the potential to speed up emergency response time and save lives,” said Ganesh Pattabiraman, co-founder and CEO of NextNav. “The ability to precisely locate the exact floor is a significant breakthrough for wireless 9-1-1 location technologies.”
Phoenix Lidar’s Scout System features NovAtel SPAN GNSS/IMU equipment and a pinwheel antenna. Combined with Phoenix’s hardware and software, this lightweight UAV lidar system serves in agriculture, construction and other general mapping applications. Here the Scout is integrated with the DJI M600 Pro UAV. (Photo: Phoenix Lidar Systems)
As a UAV flies, it is subject to roll, pitch and yaw movements, adversely affecting the high-definition imagery that industrial-grade UAVs are designed to collect. Three measures combat unwanted movement: a stabilizing gimbal, a high-quality GPS/inertial measurement unit (IMU) integration, and orthorectification of the data during post-processing.
Imaging applications are driving all sectors of the booming UAV market. The increasing availability and variety of compact, robust, lightweight sensors, employing a range of super-resolution and often multi-spectral and hyperspectral technologies, continuously expand and improve UAV applications.
Three companies exhibiting at the Association for Unmanned Vehicle Systems International’s (AUVSI’s) massive Xponential show May 1-3 will showcase recent advances in this arena.
Challenges of Airborne Imaging. Size and weight govern UAV deployment.Imaging sensors must fit compact payload bays. An integrated UAV solution will typically include an imaging sensor, a high-performance GPS/inertial measurement unit (IMU), and a data storage hub to collate streams of data from all connected instruments.
Software geared specifically to flight supplies image orthorectification and manages sensor operation during the mission, enabling users to input GPS coordinates for sensor operation. Outside of defined coordinates, the sensor will not collect data, reducing the amount of data to store or transmit.
Immediate or real-time processing and georeferencing of imaging products has always been key to defense and security applications; it becomes critical for precision agriculture, cartography, civil engineering, remote monitoring and surveillance, intelligent inspection, disaster preparedness and risk study, newsgathering, cinematography, tourism and even commercial advertising. A multisensor landscape view can improve a UAV’s ability to react intelligently without operator input.
Integrated GPS/INS exhibitors at the Xponential show include:
NovAtel (Booth 3219). The company uses a flexible technology platform and diverse OEM products, which include SPAN technology: tightly coupled GNSS receivers with IMUs for reliable, continuously available, position, velocity and attitude, to deliver its vision of assured positioning — anywhere.
NovAtel offers TerraStar Correction Services to provide accurate real-time sub-meter or decimeter positioning around the world, anytime. Its Waypoint Inertial Explorer Xpress post-processing software provides the same core processing and utilities as Inertial Explorer along with simplified functions and workflows tailored for UAV markets and small project areas.
VectorNav (Booth 2214). Engineers at Octopus ISR integrated the VectorNav VN-200 GPS/INS directly into the optical bench of a gimbal to deliver positioning accuracy under flight conditions such as high vibrations, accelerations and temperature fluctuations. The device flies aboard the UAV Factory’s miniature Epsilon series of gyro-stabilized gimbals, enabling the Precision Geo-Lock feature, which combines a GPS-aided inertial navigation system with dedicated software algorithms and payload operator software.
The VN-200 features 16g accelerometers and 2000°/sec gyros in a postage-stamp-sized surface-mount device and a rugged package. Epsilon gyro-stabilized turrets are available with both VectorNav’s VN-200 single GPS-based INS solution and the VN-300 dual GPS-based INS.
SBG Systems (Booth 2535). The company developed specific calibration procedures to provide reliable heading even when UAVs tilt. Magnetometer calibration can be processed in 2D on the ground, or in 3D in flight. Qinertia software enhances inertial navigation systems performance by post processing inertial data with raw GNSS observables.
SBG Systems’ Ellipse 2 Micro high-performance inertial sensors reduces size and costs and for volume projects. It is available as an inertial measurement unit (IMU), or as an attitude and heading reference system (AHRS) or inertial navigation system (INS) running an extended Kalman filter, connected to an external GNSS receiver.
The cellular 5G standard targets latencies under 1 millisecond, data rates of up to 10 gigabits per second, extremely high network reliability and better accuracy in positioning. With location awareness becoming an essential feature in many new markets, positioning is considered as an integral part of the system design of upcoming 5G mobile networks.
The cellular industry is currently implementing Long-Term Evolution (LTE)-Advanced, which might be called “4G” mobile broadband. Simultaneously, the industry is preparing the next step, a fifth-generation (5G) system. It will process communication 10 times faster than 4G, according to experts. 5G rollout will be complete in many international metropolitan areas by 2020.
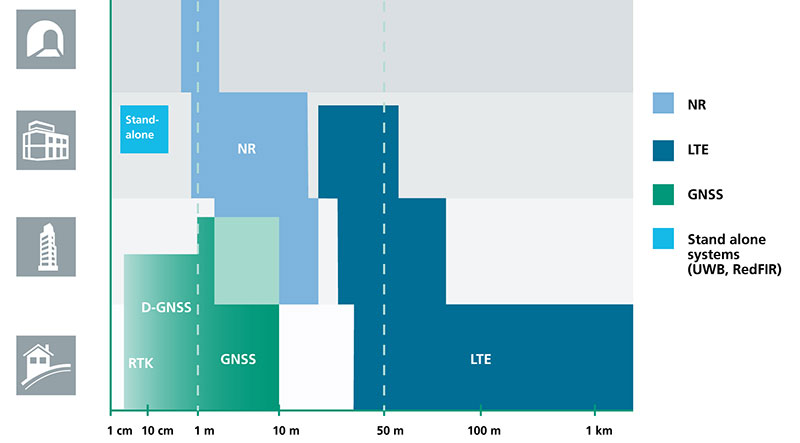
Positioning Performance for 5G NR and other technologies in different environments. (Image: Fraunhofer IIS)
Adaptive array antennas
In addition to the precise positioning it will afford, 5G shares another characteristic with GPS/GNSS: adaptive array antennas for digital beamforming (DBF). Adaptive arrays have many advantages for PNT, primarily in mitigation for multipath, jamming and spoofing.
Emerging applications of DBF in 5G involve dense networks of picocells, small cellular base stations that typically cover a small indoor area. Picocells extend coverage where outdoor signals do not reach well, and add network capacity in areas with very dense phone usage. 5G architectures will use adaptive array technology to achieve high data rates, spectrum reuse and communications robustness.
The implications for PNT are that 5G will require improved (relative) PNT to operate effectively, and picocells will be a source of PNT information in constrained environments.
5G involves massive directional communications via multiple-input, multiple-output (MIMO), enabling high-bandwidth communications in fading (multipath) channels by using multiple antenna inputs to adapt to channels. It can do this without knowledge of user location, but it adds to the processing complexity. The directional capability can enable multiple users to be serviced in a picocell at different frequencies, while permitting spectrum re-use by nearby picocells through narrow beamwidth and the limited range of millimeter-wave (mmWave) frequencies.
The PNT implications of 5G architectures, according to Gary McGraw of Rockwell Collins, are that 5G picocells will be synergistic with PNT in challenged environments — naturally, indoor and dense urban. They will necessitate development of distributed, networked PNT processing and infrastructure.
Fraunhofer
The 5G positioning framework will integrate a multitude of sensors into a hybrid positioning scheme, according to the Fraunhofer Institute for Integrated Circuits (IIS) in Germany. Fraunhofer IIS is currently prototyping low-latency and high-precision positioning systems for legacy LTE and future 5G New Radio (5G NR).
5G NR enables positioning by providing high bandwidths for precise timing, new frequency bands at mmWave, massive MIMO for accurate angle-of-arrival estimation and new architectural options that support positioning. Improved accuracy, robustness and latency can be achieved, according to the institute.
5G provides fast and reliable access to moving objects to achieve time-critical process control and optimization in industrial environments. Increased contextual awareness of goods, parts, machines and workers will enable new interaction and collaboration, the institute said.
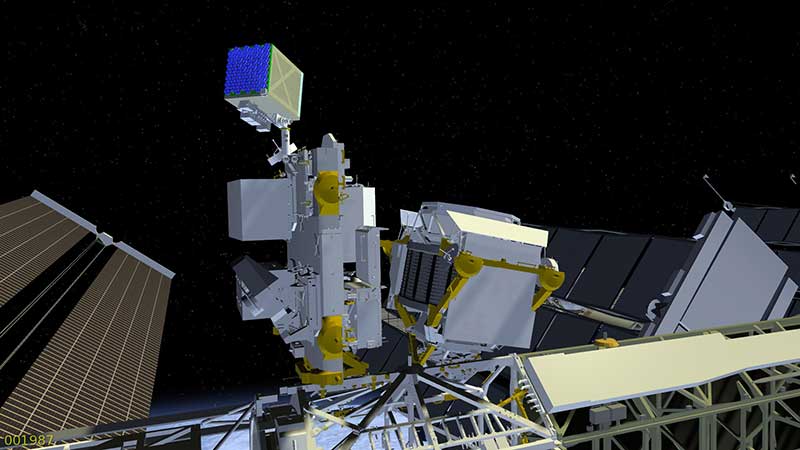
Neutron-star Interior Composition Explorer, or NICER, is an external attached payload on the International Space Station. (Image: NASA Goddard Space Flight Center)
A team of engineers at the U.S. National Aeronautics and Space Administration (NASA) has demonstrated fully autonomous X-ray navigation in space — a capability that could enable robotic spacecraft to navigate beyond the edges of the solar system.
The experiment, Station Explorer for X-ray Timing and Navigation Technology (SEXTANT), showed that millisecond pulsars could be used to accurately determine the location of an object moving at thousands of miles per hour in space, functioning in a way similar to GPS.
The system provides a new option for spacecraft to autonomously determine their locations outside Earth-based global navigation networks because pulsars are accessible in virtually every conceivable flight regime, from low-Earth to deepest space.
The SEXTANT demonstration used the 52 X-ray telescopes and silicon-drift detectors that make up NASA’s Neutron-star Interior Composition Explorer (NICER), an external attached payload on the International Space Station.
The size of a washing machine, NICER studies neutron stars, which emit radiation across the electromagnetic spectrum. Incredibly dense — one teaspoonful of neutron star matter would weigh a billion tons on Earth — these objects would collapse into black holes if compressed any further.
Pulsars. The SEXTANT experiment focuses on a particular type of neutron star: pulsars, highly magnetized, rotating neutron stars. Their electromagnetic radiation can be observed only when the beam of emission points toward Earth, thus their pulsed appearance. The short, regular rotational period produces a precise interval between pulses that ranges from milliseconds to seconds for an individual pulsar. These predictable pulsations can provide high-precision timing information similar to the atomic-clock signals supplied through GPS.
Demonstration. A demonstration in November 2017 selected four millisecond pulsar targets — J0218+4232, B1821-24, J0030+0451 and J0437-4715 — and directed NICER to orient itself so it could detect X-rays within their sweeping beams of light. These millisecond pulsars are so stable that their pulse arrival times can be predicted to accuracies of microseconds for years into the future.
During the two-day experiment, the payload generated 78 measurements to get timing data, which the SEXTANT experiment fed into its onboard algorithms to autonomously stitch together a navigational solution that revealed the location of NICER in its orbit around Earth. The team compared that solution against location data gathered by NICER’s onboard GPS receiver.
“For the onboard measurements to be meaningful, we needed to develop a model that predicted the arrival times using ground-based observations provided by our collaborators at radio telescopes around the world,” said Paul Ray, a SEXTANT co-investigator with the U.S. Naval Research Laboratory. “The difference between the measurement and the model prediction is what gives us our navigation information.”
The goal was to demonstrate that the system could locate NICER within a 10-mile radius as the space station sped around Earth at slightly more than 17,500 mph. Within eight hours of starting the experiment on Nov. 9, the system converged on a location within the targeted range of 10 miles and remained well below that threshold for the rest of the experiment. In fact, a good portion of the data showed positions that were accurate to within three miles.
GPS-level accuracy on the order of a meter or less is not necessary when navigating the far reaches of the solar system, where distances between objects measure in the millions of miles. “In deep space, we hope to reach accuracies in the hundreds of feet,” said Mitchell.
The team will now focus on updating and fine-tuning both flight and ground software in preparation for a second experiment later in 2018. The ultimate goal, which may take years to realize, is to develop detectors and other hardware to make pulsar-based navigation readily available on future spacecraft.
To advance the technology for operational use, teams will focus on reducing the size, weight and power requirements and improving the sensitivity of the instruments. The SEXTANT team now also is discussing the possible application of X-ray navigation to support human spaceflight.
If an interplanetary mission to the moons of Jupiter or Saturn were equipped with such a navigational device, for example, it would be able to calculate its location autonomously, for long periods of time without communicating with Earth.
“This successful demonstration firmly establishes the viability of X-ray pulsar navigation as a new autonomous navigation capability,” said project manager Jason Mitchell. “We have shown that a mature version of this technology could enhance deep-space exploration anywhere within the solar system and beyond.”
Positioning on a micro-scale is the task of a new sensor that reports on range of motion (ROM) achieved in stretching exercises and other post-operative activities by at-home patients after discharge from hospital. Telit, a company active in sensors for the Internet of Things (IoT), announced that U.K.-based 270 Vision Limited has selected Telit’s BlueMod+SR Bluetooth module for its BPMpro Mark 2 sensor for remote, precision measurement of patient ROM.
The BPS (Body Performance Measurement) wearable sensor is a medical device that measures patient ROM before and during rehabilitation. Post-surgery, patients are discharged to be remotely monitored at home as they undertake their daily routine using a BPMpro sensor. The captured sensor output displays on a patient tablet running BPMpathway software and streams live to the clinician, who can use this data to assess the patient’s progress. With the patient recovery data collected by BPMpathway, clinicians can tailor an orthopedic patient’s post-operative support to meet their individual needs, without having to wait for a face-to-face consultation.
The BlueMod+SR module is a very small form factor dual-mode Bluetooth 4.0 module (17 x 10 x 2.6 mm). Range in line of sight is about 100 meters. Dual mode means it supports classic Bluetooth basic rate (BR) and enhanced data rate (EDR) operations as well as Bluetooth low energy (LE).
New app promises better-than-GPS urban guiding
Attention, GPS World readers living in or visiting Central London, Mountain View, California or San Francisco. Public beta of a new app (iOS only) will take you by the hand — er, phone — and lead you around the fair city; those cities only, at present. More intriguing, it claims to deliver “better than GPS accuracy.”
This augmented reality (AR) navigation employs an AR-native framework, Apple’s ARKit. Blippar touts its AR City app for something it calls “urban visual positioning…which localizes users with higher accuracy than GPS, thanks to computer vision.” The app uses visual inertial odometry, interpreting movement seen through the camera, to minimize position errors, that is, in a sense, to correct GPS.
Holding the phone in front of one’s face in tourist fashion, the user receives nearby points of interest based on what he or she can actually see. The app feature three layers of information:
AR Basic Navigation. A visualization of walking routes through augmented reality.
Enhanced Map Content. Overlays of information and content related to user location in AR — for example, streets and points of interest.
Urban Visual Positioning. Recognition, positioning and directional information via computer vision.
AR basic navigation, available everywhere that is supported by Apple Maps, visualizes routes with arrows shown in augmented reality. AR basic navigation uses GPS to estimate the absolute position of the user, and visual inertial odometry (VIO) to track their local movement. Blippar integrates GPS and VIO by building on the ARCL library, which uses Apple’s ARKit for VIO and Core Location for GPS.
GPS alone doesn’t give a high enough level of accuracy when looking at the map and has an average error rate of 16 m in cities, according to Blippar, which claims its urban visual positioning provides more than twice its accuracy.
Columbus, Ohio, has positioned itself smartly for an autonomous future, taking a lead role in pilot projects on infrastructure and autonomous air and road transport.
The city will draw on up to $40 million in grants from the U.S. Department of Transportation, $10 million from Vulcan, Inc,. and $500 million in local private pledges.
Carla Bailo, assistant vice president for mobility research and business development at Ohio State University (OSU), presented the city’s ambitious program at ION GNSS+.
In “Position, Navigation and Timing — An Enabling Technology for Mobility and Smart Cities,” she focused on a triple-zero target: zero accidents and fatalities, zero carbon footprint and zero stress.
Smart Columbus will put six autonomous shuttle buses in the commercial district, coordinate truck platooning, time deliveries and manage parking to reduce congestion, and undertake drone delivery of medical supplies and other critical needs. Multimodal transit apps, mobility assistance for those with disabilities and pedestrian collision avoidance will be based on real-time data on transit options and availability, as well as traffic information, road and weather conditions.
Position, navigation and timing (PNT) technologies play a central role in smart cities: vehicle-to-vehicle and vehicle-to-infrastructure communication, autonomous navigation and collision avoidance, location-based services and smart, resilient infrastructure.
Smart Columbus envisions the city as a center for high-tech transportation research and innovation. OSU’s partnerships with mobility companies and vehicle manufacturers, industry groups and government agencies contribute to the city’s comprehensive approach to the smart city project. Through its expertise in sensors, communication, PNT, transportation, autonomous and connected vehicles, and geospatial science and engineering, OSU will serve as the lead researcher on Smart Columbus.
Dorota Grejner-Brzezinska, OSU professor and frequent contributor to GPS World, in her new role as associate dean for research at OSU’s College of Engineering will be a key participant in research projects on ways to integrate self-driving cars, deliver high-definition 3D maps and metadata, use sensors to better connect vehicles for safety and efficiency, and find better ways to move people around the city when they don’t have access to a car.