On May 10, the Government Accountability Office (GAO) released a report on navigation efforts n the Department of Defense (DOD). Among its findings were that the department regularly fails to establish validated navigation and timing requirements for systems and instead defaults to the capabilities of GPS. Also, that alternate positioning, navigation and timing (PNT) efforts are not prioritized, and sometimes actively opposed, by forces within DOD.
One of the report’s more startling recommendations is that the department change its focus from GPS as the central pillar of its PNT strategy going forward in favor of resilient technologies.
After a panel discussion moderated by Dana A. Goward, president of the RNT Foundation, attendees will have the opportunity to ask questions of the panelists.
It said policymakers “could consider selecting the most resilient technologies as the cornerstone of the PNT suite for military missions, rather than defaulting to GPS.”
The 51-page report takes a comprehensive view of alternative PNT policy and leadership across the department. Its findings are an interesting and informative look at issues and efforts.
Increasing demands
The report comes at a time when U.S. forces have been seeing increasing interference with their own and allied GPS-enabled systems. The Organization for Security and Cooperation in Europe has regularly reported that its surveillance drones in the Ukraine have been jammed. Chinese press recently bragged that jamming caused U.S. Navy ships in the South China Sea to switch from using GPS to the Chinese BeiDou system. Additionally, U.S. military commanders have regularly described the Middle East as the most contested electronic warfare area on the planet, in large part because of regular interference with GPS signals.
The GAO study also comes on the heels of a provision in the National Defense Authorization Act (NDAA) for this year which directs DOD to provide non-GPS PNT to combatant commanders by 2023. The act says this timeline is consistent with responding to Joint Urgent Operational Needs, a formal method for commanders to communicate with department leadership. According to some sources, this suggests that the Pentagon has been receiving such requirements from field commanders, but has not responded to them in what Congress considers a timely manner.
Alternative PNT “not a priority,” resisted
Despite chronic GPS signal interference across the globe, outside experts and officials across the DOD told the GAO study team that developing alternative sources of PNT was not a priority for DOD. One example cited was the lack of a central program office.
One expert said, “PNT — It’s everyone’s need, but nobody’s business.” Another expert said, “Everyone wants to use [PNT], no one wants to pay or care for [PNT].” One DOD official characterized alternative PNT as an afterthought. DOD’s PNT Roadmap states that PNT capabilities, despite being mission critical, are not normally considered a key requirement, but rather may be treated as “a second-tier requirement.”
Worse, the report indicated that some forces within the department resist alternative PNT efforts.
According to one DOD official cited anonymously in the report “bureaucratic and political obstacles [represent] the biggest challenges for alternative PNT” and “anything that threatens GPS, such as alternative PNT technologies, faces pushback.”
The report cited another DOD official as agreeing that “there is an impression that the GPS program has a lot of political clout within DOD, and that those trying to develop alternative PNT technologies may face political challenges.”
Realistic requirements
Many missions do not need the accuracy provided by GPS, according to the report. Nevertheless. DOD programs often default to GPS performance standards when developing requirements. Many alternative technologies, while more resilient, are unable to achieve the same accuracy as GPS and therefore fail to meet the over-stated requirements.
Open architecture
Both DOD and GAO see development of modular open system architecture (MOSA) as key to PNT success in the future. This will allow addition of new PNT sources to a platform without the need for a major retrofit. With MOSA, all that would be needed is a new sensor module for the desired PNT source.
The GAO report endorsed this approach and encouraged DOD to institutionalize it with dedicated funding.
Working with industry
Decades of civil GPS use have benefited DOD in many ways. Broad academic and commercial research has resulted in a host of applications and improvements in the size, weight, and power requirements of equipment, as well as lowered costs. These benefits would almost certainly not have been realized at the current scale if the market for GPS equipment and apps had been restricted to military users.
The 2021 NDAA directs the department to “…enable civilian and commercial adoption…” of the GPS alternative technologies it develops for field commanders. The GAO report suggests DOD also work to leverage industry advances in technologies.
Scope and recommendations
GAO’s tasking for this effort did not include examining efforts to make GPS signals and equipment more resilient to disruption, nor use of non-U.S. satellite navigation systems. Neither were non-defense uses of PNT, nor improvements in such things as tactics, techniques, and procedures considered.
The study focused solely on department efforts to complement GPS services.
Six recommendations for policymakers are included in the report:
Increase Collaboration — Consider mechanisms to coordinate across DOD to clarify responsibilities and authorities in prioritizing the need for alternative PNT technologies.
Focus on Resiliency — Consider selecting the most resilient technologies as the cornerstone of the PNT suite for military missions, rather than defaulting to GPS.
Clarify Requirements — Consider opportunities to clarify what level of PNT performance is actually needed for missions, rather than defaulting to requirements that match GPS performance.
Coordinate with Industry — Consider ensuring that DOD and commercial industry coordinate so that industry is prepared to meet DOD’s needs, and DOD can leverage industry advances.
Institutionalize Open Architecture — Consider making the open architecture initiative more permanent, including providing funding.
Analyze Vulnerabilities — Consider having DOD conduct ongoing analysis of vulnerabilities of different PNT systems.
The May 2021 GAO report “Defense Navigation Capabilities: DOD is Developing Positioning, Navigation, and Timing Technologies to Complement GPS” is available here.
Critical infrastructure services such as telecommunications, utilities, transportation and defense are of national strategic importance. The U.S. Cybersecurity and Infrastructure Security Agency (CISA) lists 16 such sectors considered vital for security. Presidential Policy Directive 21 (PPD-21): Critical Infrastructure Security and Resilience advances a national policy to strengthen and maintain secure, functioning and resilient critical infrastructure.
Together, positioning, navigation and timing (PNT) are necessary for the functioning of a nation’s critical infrastructure. However, ubiquitous use of GPS as the primary source of PNT information introduces vulnerabilities. CISA, through the National Risk Management Center, works with government and industry partners alike to strengthen the security and resiliency of the national PNT ecosystem in the U.S. In early 2020, Executive Order (E.O.) 13905 on Strengthening National Resilience through Responsible Use of Positioning, Navigation, and Timing (PNT) Services was signed to strengthen, through policy promotion, the responsible use of PNT services by government and infrastructure operators.
The following is a review of cost considerations and exploration of the three key elements for critical infrastructure that help to strengthen PNT, focused on synchronization and precise timing: redundancy, resiliency and security.
Evaluating Cost and Location
It is often hard for operators to justify the resiliency, redundancy and security costs associated with deploying these capabilities at every layer of the architecture. New timing and synchronization solutions and design choices are leading to the right cost structures to deliver robust and reliable solutions.
The dilemma between cost and solution type is typically related to which deployment location is considered. With the evolution of technologies such as the migration from SDH/TDM to Ethernet and the development of LTE/4G and 5G in mobile, the number of aggregation offices and, above all, of network access sites at the edge has exploded. This inevitably leads to devices becoming much smaller, typically 1U-rack mountable devices, and with a cost in line with the much smaller size of edge base stations (small cells and gNodeBs).
Operators are left with the question: What is the best way to provide redundancy, resiliency and security in this environment? There are two core levels to consider — the architecture level and design level.
Exploring Redundancy
Redundancy at the architecture level can be engineered with core functions at both ends of a deployment (east/west) with dual paths for directional redundancy and high-performance capabilities for efficient high-accuracy time transfer over the long haul for cost-effective distribution. The virtual Primary Time Reference clock (vPRTC) architecture is such an architecture-level solution.
Redundancy can also be considered in the device itself, where the design choices are critical. Smaller devices cannot realistically be cost-effectively designed with modular hardware redundancy. The innovation here is to offer software redundancy, so a distributed, low cost, efficient and high-performance distributed solution can be deployed. A hardware module is typically expensive for two reasons: cost, and because the redundant module takes the space of another module, typically for input and output ports.
Hardware module redundancy often leads to a tradeoff between adding redundancy and losing capabilities, such as a choice between 10-gigabyte Ethernet (GE) support or multi-band GNSS or other compromises if redundancy is enabled. On the other hand, with software redundancy no tradeoff is necessary. Redundancy can be introduced while preserving all existing capabilities; no inputs or outputs are eliminated, no multi-band GNSS capability is eliminated. Redundancy is introduced via a software upgrade; therefore, it does not remove any hardware. Hardware redundancy, however, means duplicating an existing module with a similar module inside the device; this new module takes the slot of an existing module, and the function of that existing module is lost when it is removed from the unit.
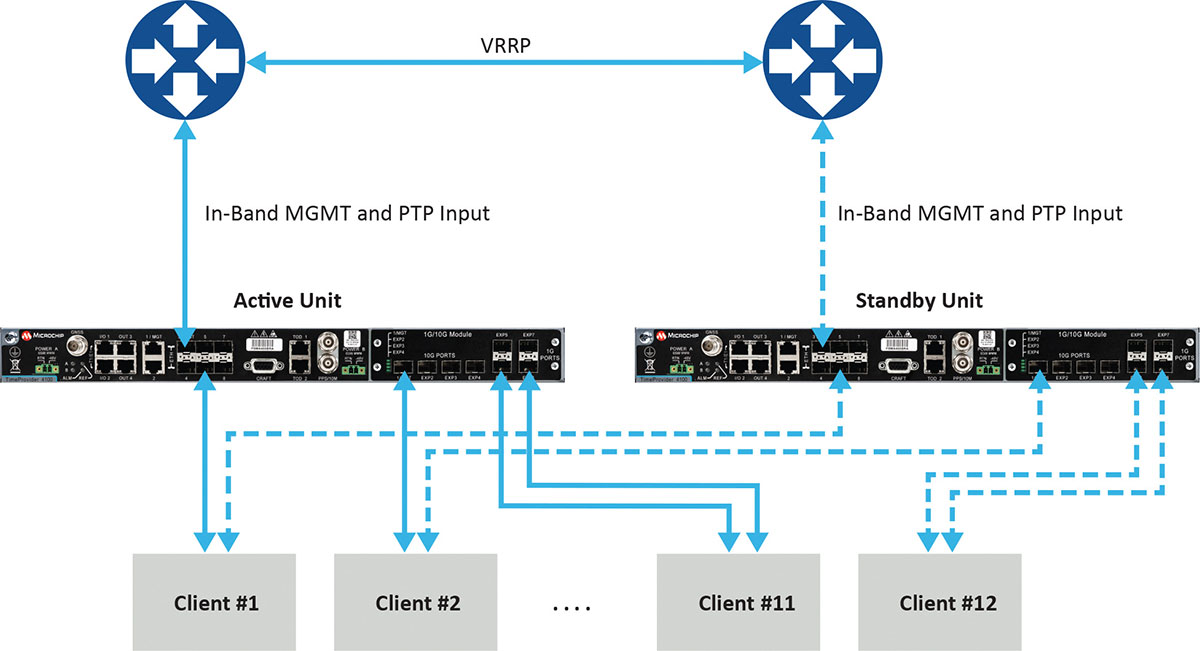
Figure 1 depicts a commonly deployed redundancy use case with two aggregation routers using virtual router redundancy protocol (VRRP).
Figure 1. Example of redundancy connectivity between the active and standby units. (Image: Microchip)
Software redundancy is a dual-unit scheme based on two reasonably priced devices, one active and the other on standby. It is more cost-effective for two reasons. First, it does not involve a costly device design with expensive hardware modules. Second, each unit (passive and active) keeps all of its capabilities compared to a hardware redundant design, which involves duplication of modules in the device, thus reducing the existing possible capabilities to host the redundant module.
Software redundancy provides total redundancy of the whole device because the active and standby units are the same. One hundred percent of the capabilities are redundant, including oscillator, GNSS receiver, ports and input/outputs. A hardware module is only redundant for its own features, not the rest of the unit.
Leveraging Resiliency
Resiliency at the architecture level is key to engineering the network so grandmasters in the deployment can be connected to each other. Some grandmasters are connected to GNSS as their source of time and frequency. It is key to connect these systems to other 1588 grandmasters to enable assisted partial time support (APTS) and to leverage key innovation such as automatic asymmetry correction (AAC).
AAC is a key (patented) differentiator in a resilient design that enables calibration of the different paths a PTP flow may use to/from upstream grandmasters, thus allowing for a backup in case GNSS fails at the location of a grandmaster. A backup path to an upstream grandmaster can guarantee uninterrupted and precise time and phase operation. This architecture makes sure that GNSS can be backed up by IEEE 1588 Precision Time Protocol (PTP) when GNSS is interrupted, with the best path being utilized.
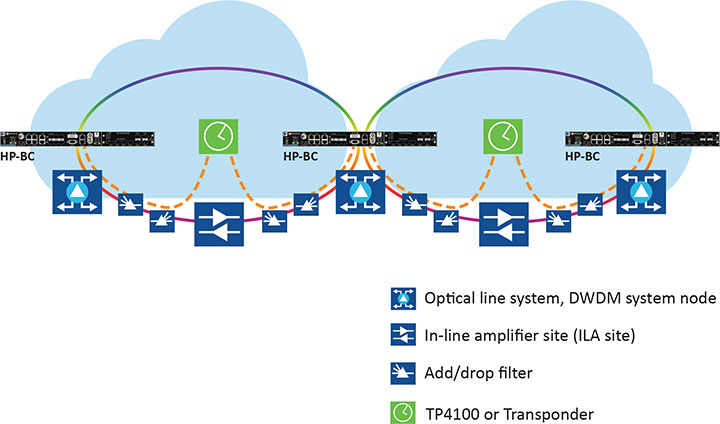
The alternative architecture choice is virtual PRTC (vPRTC), which enables operators to leverage redundancy and resiliency via a chain of high-performance boundary clocks using PTP over long distances for high accuracy, typically over optical networks. This architecture reduces reliance on GNSS and uses PTP as its primary source of time and phase.
Figure 2 depicts an optical network deployment with a dedicated optical timing channel (OTC) for high-accuracy distribution of phase over long distances.
Figure 2. Optical network deployment with OTC. (Image: Microchip)
Resiliency at the device level starts with the right choice of an oscillator, from OCXO to atomic clock (Rubidium) — and is dependent on the location, use case and respective requirements for timekeeping holdover performance. Also, the choice of GNSS receiver is key. Some typically support a single frequency, yet ionospheric phenomenon can create significant time delays during cyclical events such as solar storms. To mitigate such delays, a multi-band GNSS receiver is required.
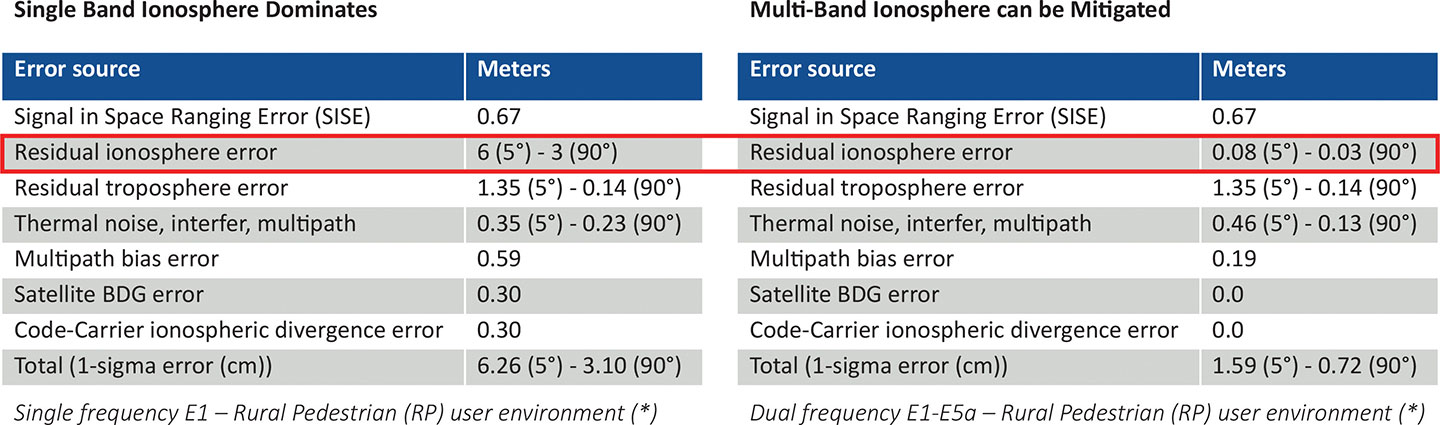
Figure 3 depicts a comparison between single-band and multi-band time delays due to ionospheric effects and shows how multiband clearly mitigates the time error as highlighted in red.
GNSS satellites transmit time information in several frequency bands. The delay difference between signals at different frequencies provides information about ionospheric impact on the absolute delay. This enables multi-band GNSS receivers to compensate for delay variations of radio signals transmitted from the satellite to the receiver. Embedding a multi-band receiver mitigates these time delays, which is critical for applications requiring Primary Reference Time Clock class B (PRTC-B),40 ns, as well as enhanced PRTC (ePRTC) 30 ns.
These device design choices are equally important. The GNSS receiver can be embedded inside the unit on the main board, or it can be offered as a hardware module, often at an additional cost, and may impact and replace an existing module that needs to be ripped and replaced. It may be preferable to have the unit enabled with a multi-band receiver and have the multi-band capability turned on via a license as opposed to offering a multiband option on a hardware module, as this becomes a tradeoff with other important capabilities.
Evaluating Security
Security is of utmost importance. Authentication and authorization via standard mechanisms such as Terminal Access Controller Access Control System + (TACACS+) and Remote Authentication Dial-In User Service (RADIUS) provide the benefit of a standard security framework. In addition, two-factor authentication (2FA) is an extra layer of protection used to ensure the security of accounts beyond just a username and password.
Also, it is key to provide Secure Shell (SSH) extensions with various levels of security profiles to offer more granularity for the types of users and related access rights and limitations. Offering high-security profiles provides for the definition and enforcement of the most stringent access rules to the system. Scripting vulnerabilities and relevant Common Vulnerabilities and Exposures (CVE) need to be addressed to make sure all potential security holes are being reviewed and addressed.
Plus, evolving jamming and spoofing threats need to be part of the precise time security strategy and implementation via monitoring of signals and consistency checks and remediation. Automatic gain control (AGC) and other metrics can be leveraged to provide thresholds with interpretation of results, as well as mitigation actions when encountered.
Final Decision Making
To ensure continued performance, it is critical to make the right architecture choices. A thorough network engineering study should include the locations where grandmaster units need to be deployed and their performance and accuracy requirements. These steps will guide which types of precise time and synchronization devices need to be selected
In addition, network planners and synchronization engineers should pay careful attention to design choices such as fanless devices versus devices that require a fan, modular hardware redundancy versus software redundancy, and the related advantages in terms of cost and tradeoffs — as well as similar choices regarding embedded or modular GNSS.
These choices can lead critical infrastructure operators to deploy redundancy, resiliency and security at all layers.
For architecture choices and solutions, visit vPRTC..White papers on this topic and others are also available. Additional information on devices and redundancy software schema is here.
Eric Colard is head of Emerging Products, Frequency & Time Systems at Microchip. He leads the product line management for Microchip’s TimeProvider 4100 and Integrated GNSS Master solutions for the telecom, utility and other industries.
BAE Systems has received a $247 million contract from the U.S. Space Force’s Space and Missile Systems Center to design and manufacture an advanced military GPS receiver and next-generation semiconductor.
The technology will provide positioning, navigation, and timing (PNT) capabilities to warfighters so they can execute missions in challenging electromagnetic environments.
The Military GPS User Equipment (MGUE) Increment 2 Miniature Serial Interface program will provide improved capabilities for size-constrained and power-constrained military GPS applications, including precision-guided munitions and battery-powered handheld devices.
The program will focus on the certification of an advanced application-specific integrated circuit (ASIC) and the development of an ultra-small, low-power GPS module.
Both products will work with the next-generation military M-code signal technology, which provides reliable GPS data with anti-jamming and anti-spoofing capabilities to protect against electronic warfare threats.
“This program enables us to further develop our core M-code technology to deliver high-performance, next-generation GPS capabilities,” said Greg Wild, director of Navigation and Sensor Systems at BAE Systems. “Our M-code receiver and next-gen ASIC will enable secure and reliable military GPS capabilities in a broader range of platforms.”
BAE Systems’ Precision Strike business has 45 years of military GPS experience and more than 1.5 million GPS devices on over 280 platforms around the world. The company is currently producing M-code GPS receivers in multiple form factors, including a low power, small form factor M-code solution.
Additional prototypes are in development for ground, weapons and airborne mission applications, and the company’s M-code GPS products are available to U.S. allies via foreign military sales.
Work on the program will be conducted at the company’s facility in Cedar Rapids, Iowa.
Feature image: An Airman with the 374th Security Forces Squadron uses a Defense Advanced GPS Receiver (DAGR) to track the team’s current during a 2018 field training exercise at Camp Fuji, Japan. (Photo: Senior Airman Matthew Gilmore/U.S. Air Force)
After more than five years of hard work by 131 authors from 18 countries, the new book set Position, Navigation, and Timing Technologies in the 21st Century (PNT21) is finally ready to meet readers.
Published by Wiley-IEEE Press, PNT21 offers a uniquely comprehensive coverage of the latest developments in the field of PNT by world-renowned experts. The two-volume set contains 64 chapters organized into six parts.
Position, Navigation, and Timing Technologies in the 21st Century Integrated Satellite Navigation, Sensor Systems, and Civil Applications
Y. Jade Morton, Frank van Diggelen, James J. Spilker Jr. and Bradford W. Parkinson, editors; Sherman Lo and Grace Gao, associate editors Publisher: Wiley-IEEE Press Hardcover Publication Date: January 2021 Vol. 1: ISBN: 978-1-119-45841-8, 1288 Pages Vol 2: ISBN: 978-1-119-45849-4, 912 Pages
Volume 1 focuses on satellite navigation systems, technologies, and applications. It starts with a historical perspective on GPS and other related PNT development.
Part A consists of 12 chapters on fundamentals of and latest developments in global and regional satellite navigation systems (GNSS and RNSS), the need for their coexistence and mutual benefits, signal quality monitoring, satellite orbit and time synchronization, and satellite- and ground-based augmentation systems that provide information to improve the accuracy of navigation solutions.
Part B contains 13 chapters on recent progress in satellite navigation receiver technologies such as vector processing, assisted and high sensitivity GNSS, precise point positioning (PPP) and real time kinematic (RTK) systems, direct position estimation techniques, and GNSS antennas and array signal processing. Also included are the challenges of multipath-rich urban environments, handling spoofing and interference, and ensuring PNT integrity.
Part C finishes the volume with eight chapters on satellite navigation for engineering and scientific applications. A review of global geodesy and reference frames sets the stage for discussions on the broad field of geodetic sciences, followed by a chapter on GNSS-based time and frequency distribution. One chapter each is dedicated to severe weather, ionospheric effects and hazardous event monitoring. Finally, comprehensive treatments of GNSS radio occultation and reflectometry are provided.
This simplified block diagram of a modern GNSS receiver — one of many illustrations in the book set — appears in Chapter 14, “Fundamentals and Overview of GNSS Receivers,” by Sanjeev Gunawardena and Y. Jade Morton. See excerpt below. (Image: Wiley-IEEE Press)
Volume 2 addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. An overview chapter provides the motivation and organization of the volume, followed by a chapter on nonlinear estimation methods which are often employed in navigation system modeling and sensor integration.
Part D provides seven chapters devoted to using various radio signals-of-opportunity transmitted from sources on the ground, from aircraft, or from low Earth orbit (LEO) satellites for PNT purposes.
In Part E, eight chapters cover a broad range of non-radio frequency sensors operating in passive and active modes to produce navigation solutions, including MEMS inertial sensors, advances in clock technologies, magnetometers, imaging, lidar, digital photogrammetry, and signals received from celestial bodies.
A tutorial-style chapter on GNSS/INS integration methods is included in Part E. Also included are chapters on the neuroscience of navigation and animal navigation.
Finally, Part F presents a collection of contemporary PNT applications such as surveying and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, satellite orbit determination and formation flying, and navigation in the unique Arctic environment.
Table of Contents
Volume 1: Satellite Navigation Systems, Technologies, and Applications
Part A: Satellite Navigation Systems
Part B: Satellite Navigation Technologies
Part C: Satellite Navigation for Engineering and Scientific Applications
Volume 2: Integrated Navigation Systems, Technologies, and Applications
Part D: Position, Navigation, and Timing Using Radio Signals-of-Opportunity
Part E: Position, Navigation, and Timing Using Non-Radio Signals-of-Opportunity
Part F: Position, Navigation, and Timing for Consumer and Commercial Applications
Collective Goal. Because of the diverse authorship and topics covered in PNT21, the chapters were written in a variety of styles. Some offer high-level reviews of progress in specific subject areas, while others are tutorials. A few chapters include links to MatLab or Python example code as well as test data for readers who desire hands-on practice.
The collective goal is to appeal to industry professionals, researchers and academics involved with the science, engineering and application of PNT technologies. The website pnt21book.com provides downloadable code examples, data, homework problems, select high-resolution figures, errata and a way for readers to provide feedback.
Jade Morton is a professor at the University of Colorado Boulder and director of the Colorado Center for Astrodynamics Research (CCAR).
Jade Morton is a professor at the University of Colorado Boulder and director of the Colorado Center for Astrodynamics Research (CCAR).
Excerpt from PNT21
14.1 Anatomy of a GNSS Receiver
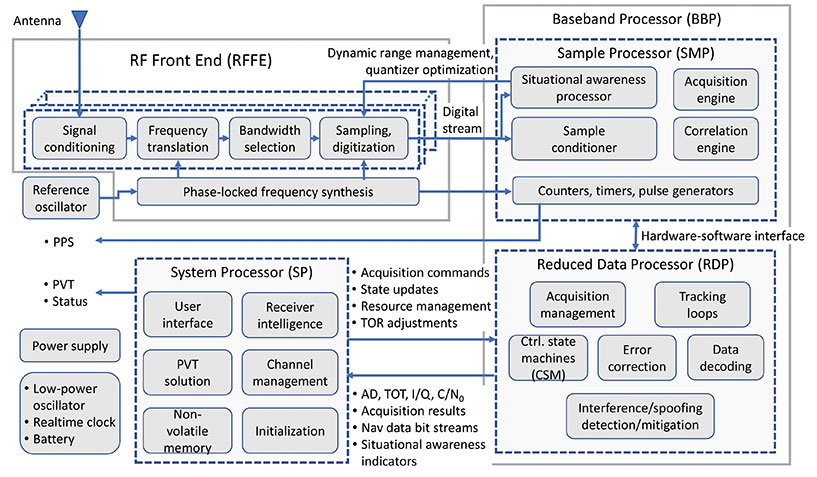
Irrespective of the receiver type, the functionality of all GNSS receivers can be broken down into three major blocks: RFFE, baseband processor (BBP), and system processor (SP). In the literature, the term “baseband processor” may be used to refer to the combination of both the BBP and SP defined here. The general anatomy of a GNSS receiver is shown in Figure 14.3.
The RFFE converts the signals induced at one or more antennas into digitized sample streams. Depending on the application and market segment, data rates for these streams may be as low as 0.4 Mbytes/s (e.g. L1 band sampled at 3.5 MSPS and 1-bit sampling in an asset tracking device) to greater than 3 GB/s (e.g. L1 and L2 bands sampled at 60 MSPS and 16 bits across seven elements in an anti-jam military GPS receiver).
The BBP performs digital signal processing to acquire and track GNSS signals present in the digitized sample streams to produce raw GNSS observables for each visible satellite. These observables include time of transmission (TOT), accumulated Doppler Range (ADR), signal quality metrics such as carrier-to-noise density ratio (C/N0), in-phase and quadrature prompt correlator output (I/Q), and raw symbols of a GNSS signal’s broadcast navigation message (which are subsequently decoded). In addition, modern receivers typically perform varying degrees of situational awareness processing to monitor in-band interference such that a level of confidence can be assigned to these raw observables. Some advanced receivers have the ability to identify spoofing signals. Depending on the application, situational awareness outputs may be as rudimentary as the automatic gain control (AGC) voltage used to adjust front-end amplification or as sophisticated as spectrogram, histogram, and sample statistics for all streams evaluated at full sample precision.
The BBP also contains a counter that is driven by a digital clock signal that is phase-locked to the receiver’s reference oscillator. This counter is the basis for the receiver’s clock and is used to generate time-of-reception (TOR) epochs. Raw observables for all satellites in view that lead to range measurements are computed with respect to TOR epochs. Since the receiver clock is based on its reference oscillator, it drifts with respect to GNSS system times. Although possible, the frequency bias, drift, and drift rate of the reference oscillator are typically not adjusted to align with GNSS system time because dynamic adjustment of the oscillator can lead to instabilities. Instead, these parameters are estimated and used to drive a separate adjustable-rate counter that compensates for the reference oscillator errors. This forms the basis for GNSS disciplined oscillators.
It is possible to partition all baseband processing into two categories: sample processor (SMP) and reduced-data processor (RDP). The SMP performs high-rate but simple and algorithmically regular operations which largely comprise multiply-accumulate operations performed at the sample rate. The SMP may also contain configurable timers and pulse/event generators that determine sample processing intervals, as well as output precise timing pulses that are synchronized down to the nanosecond level with respect to GNSS system times (timing accuracy and precision are dependent on the application and market segment). The RDP performs low-rate but algorithmically complex operations. Some representative software functions running within the RDP are illustrated in Figure 14.3.
Bidirectional communications occur between the SMP and RDP at regular timed intervals corresponding to a kilohertz rate. This rate is easily handled by all modern microprocessors. Since these SMP/RDP transactions are time critical, the RDP runs either bare-metal code (i.e. no operating system) or a real-time operating system. The operations within the BBP are inherently parallel and largely independent of each other at the signal processing level. Some coupling occurs, for example‚ in code-carrier aiding, inter-frequency aiding (see Chapter 15), inter-satellite aiding (referred to as vector tracking, described in Chapter 16), and multi-element processing. However, this coupling is typically implemented at higher levels of abstraction. Modern multi-band and multi-constellation receivers are capable of tracking hundreds of GNSS signals simultaneously. To facilitate this highly complex command and control structure – which also needs to be dynamically scalable and adaptive depending on the number of satellites in view, environmental conditions‚ and operating modes – the control architecture is typically layered (i.e. hierarchical). Control at the individual signal acquisition and tracking layers is performed using simple configurable finite state machines (FSMs) whose state transitions are based on signal condition indicators such as code lock, phase lock, C/N0, and code-carrier divergence (CCD). These FSMs operate independently but are typically managed at a high level by the SP.
The SP takes the raw signal observables produced by the BBP and transforms them to the standard GNSS receiver measurements. These measurements include pseudorange (PR), accumulated Doppler range (ADR), carrier phase (CP), carrier Doppler, and C/N0. All modern GNSS receivers also compute position, velocity, and time (PVT) at configurable rates (1 to 100 Hz depending on the receiver type). The SP encodes these in one or more industry-standard data formats for distribution. These formats include Receiver Independent Exchange Format (RINEX), the National Marine Electronics Association (NMEA) format, the Radio Technical Commission for Maritime Services (RTCM) format, and vendor-specific proprietary binary formats.
The SP also performs all high-level functions that include receiver initialization, channel management, and user interface functions. Unlike the BBP, the operations within the SP are generally not time critical. In modern GNSS receivers, the SP is often an embedded computer running an advanced non-real-time operating system. It may also support modern data interfaces (wired USB and Ethernet, or wireless/cellular connectivity) and an advanced graphical user interface with touchscreen support. While too numerous to mention, representative software processes running within the SP are illustrated in Figure 14.3.
Although not shown in Figure 14.3, modern receivers (or the navigation system to which they are interfaced) may also support aiding from external sensors such as inertial measurement units (IMUs), magnetometers, inclinometers, barometers, wheel sensors, RADAR, lidar, infrared (IR), and electro-optical (EO) sensors. This external aiding to GNSS can occur at three levels: loose coupling (position level), tight coupling (measurement level), or ultra-tight coupling (sampled signal processing level). GNSS aiding using various non-GNSS sensors is described in Chapters 43–51 in Volume II, Part E.
As shown in Figure 14.3, a stand-alone GNSS receiver contains battery-powered low-power circuitry to keep track of absolute time while it is turned off. A real-time clock (RTC) driven by a low-power crystal oscillator accomplishes this task. In some cases, this crystal may be the same as the reference oscillator. Knowledge of absolute time, along with the last known location and previously decoded almanac/ephemeris data stored in the receiver’s non-volatile memory, allows it to estimate satellites in view and their Doppler offsets, thereby significantly reducing the TTFF: the time needed to acquire satellites and produce the initial PVT solution. In the case of modern military receivers such as M-Code, or subscription-based services such as the Galileo Public Regulated Service (PRS), the receiver must acquire the cryptographically generated spreading code that may never repeat. In this case, the initial time uncertainty has a significant impact on the acquisition search space and consequently the computational resources consumed by the acquisition engine as well as power consumption. The TTFF can be dramatically reduced when absolute time, the satellites in view, their Doppler frequencies, and ephemerides are sent to the receiver from a nearby reference station via a communications link. This describes the basis of Assisted GNSS (A-GNSS) technology, covered in Chapter 17 of this book.
In some respects, the reference oscillator can be considered the single most important component that affects GNSS receiver performance. Although the PVT solution estimates the deterministic components of the reference oscillator’s frequency error (i.e. short-term bias, drift, and drift rate), the stochastic component cannot be estimated and hence represents additional dynamics that must be tracked (i.e. in addition to satellite motion, user motion, satellite clock motion, and any ionospheric scintillation and multipath). The bandwidth of the carrier tracking loops must be increased to accommodate this close-in phase noise of the reference oscillator. This in turn increases the variance of the range measurements. The reference oscillator is also the only “moving part” in the receiver since it is based on the resonance of a quartz crystal or microelectromechanical systems (MEMS) structure. In addition to microphonics, which are small phase variations that may occur within the RFFE due to external forces (particularly if the RFFE comprises large discrete components), these forces couple through the resonating element leading to shock and vibration sensitivity [6]. Similarly, thermal expansion of the crystal as well as analog components in the RFFE due to changing ambient temperature, unless appropriately compensated or isolated, causes temperature sensitivity. The frequency synthesizer in the RFFE multiplies the oscillator phase noise and dynamics by the ratio of the synthesizer output frequency to the oscillator fundamental frequency, thus placing a significant short-term stability requirement on the reference oscillator. Oscillator short-term stability limits the coherent integration time, which is proportional to the processing gain. Hence, the quality of the reference oscillator directly impacts the recever’s attainable sensitivity (i.e. the minimum observable signal levels) as well as the rate at which it can output statistically independent measurements. Oscillator effects are covered in detail in Chapter 47.
The receiver intelligence process within the SP shown in Figure 14.3 performs functions such as determining what satellites are in view, how best to mitigate any in-band interference (as observed by the situational awareness indicators), dynamically adapting to varying operating conditions, determining the best set of range measurements to use for the PVT solution based on optimum satellite geometry and estimated range error metrics indicated by C/N0 (for signal blockage) and CCD fluctuations (for multipath and ionospheric effects), and many such highly complex decisions. Typically, these high-level functions occur at a lower rate such as 1 Hz or less. To a large degree, the level of sophistication and engineering embedded within the receiver intelligence block, as well as the other low-level control functions determines the receiver’s performance in the real world, as expressed by established figures of merit. These include measurement accuracy, update rate, TTFF, sensitivity, dynamics handling capability, multipath mitigation performance, interference detection and mitigation capability, receiver autonomous integrity monitoring, and fault detection and exclusion (see Chapter 23). In other words, for a given market segment and its associated SWaP-C constraints, the receiver’s hardware and available signal processing capabilities can only do so much. The rest, and quite often the attributes that distinguish it in the marketplace, lies within the hundreds of thousands of person-hours and centuries of combined experience baked into its sophisticated software/firmware.
“We cannot have GPS signals be a single point of failure for transportation and other critical infrastructure sectors. More safety applications will depend on PNT in the future. Public confidence in these will be critical.
“People will not be comfortable getting into an automated vehicle or with platooning driverless trucks heading down the highway if they think that their invisible hand is not reliable and that their GPS might be spoofed.
“Getting public adoption of other PNT capabilities — space-based, terrestrial, and self-contained — integrated with GPS technology will be critical to the success of any such system.”
— Diana Furchtgott-Roth, Deputy Assistant Secretary for Research and Technology, U.S. Department of Transportation, Nov. 20, 2019, Edinburgh, U.K.
A Single Point of Failure
The Department of Transportation (DOT) is responsible for leading civil positioning, navigation, and timing (PNT) issues for the United States. At the moment, the U.S. GPS provides the vast majority of PNT services in the U.S. and around the world. Yet, like all space-based systems, its signals are weak and very vulnerable to interference.
A recent example of how dangerous that can be in automated transportation systems was revealed recently in an accident report released by the British government. Interference from an unknown source caused a 15.5 kg drone to get away from its operator and crash. Fortunately, no one was hurt. The report cited analysis showing that such a weight could have easily killed someone on the ground.
Even more concerning, GPS signal characteristics are well known and therefore easy to imitate. Thousands of cases of “spoofing” have been documented with government and malicious actors causing receivers to report they are far from their actual location. In the worst cases, this can cause accidents or enable criminal acts.
One result of all of this is the President of the United States issuing an Executive Order encouraging “responsible use” of PNT systems. It also directs steps to encourage development and adoption of alternative systems. This includes a White House-level plan for research and development of non-Global Navigation Satellite System (GNSS) PNT.
In Europe the European Union (EU) has warned that space based PNT alone is insufficient for “…critical applications requiring continuous availability and fail-safe operations.” The EU has also established a monitoring system to detect sources of GNSS interference, and the European Space Agency (ESA) has established an on-going program funding study of both space and terrestrial alternate PNT systems.
Multiple Cooperating Systems
The ultimate solution, though, according to senior government officials, will be development and use of many diverse PNT systems working together to ensure users have what they need when and where they need it.
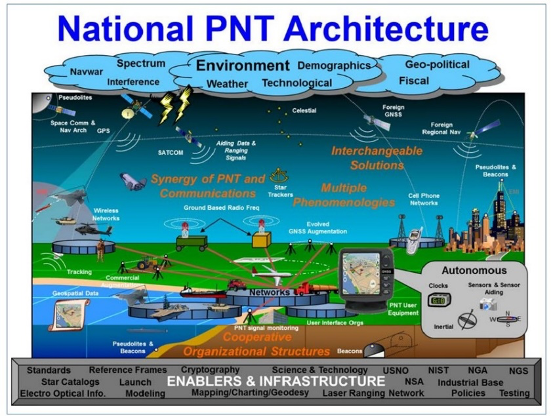
Image: DOT
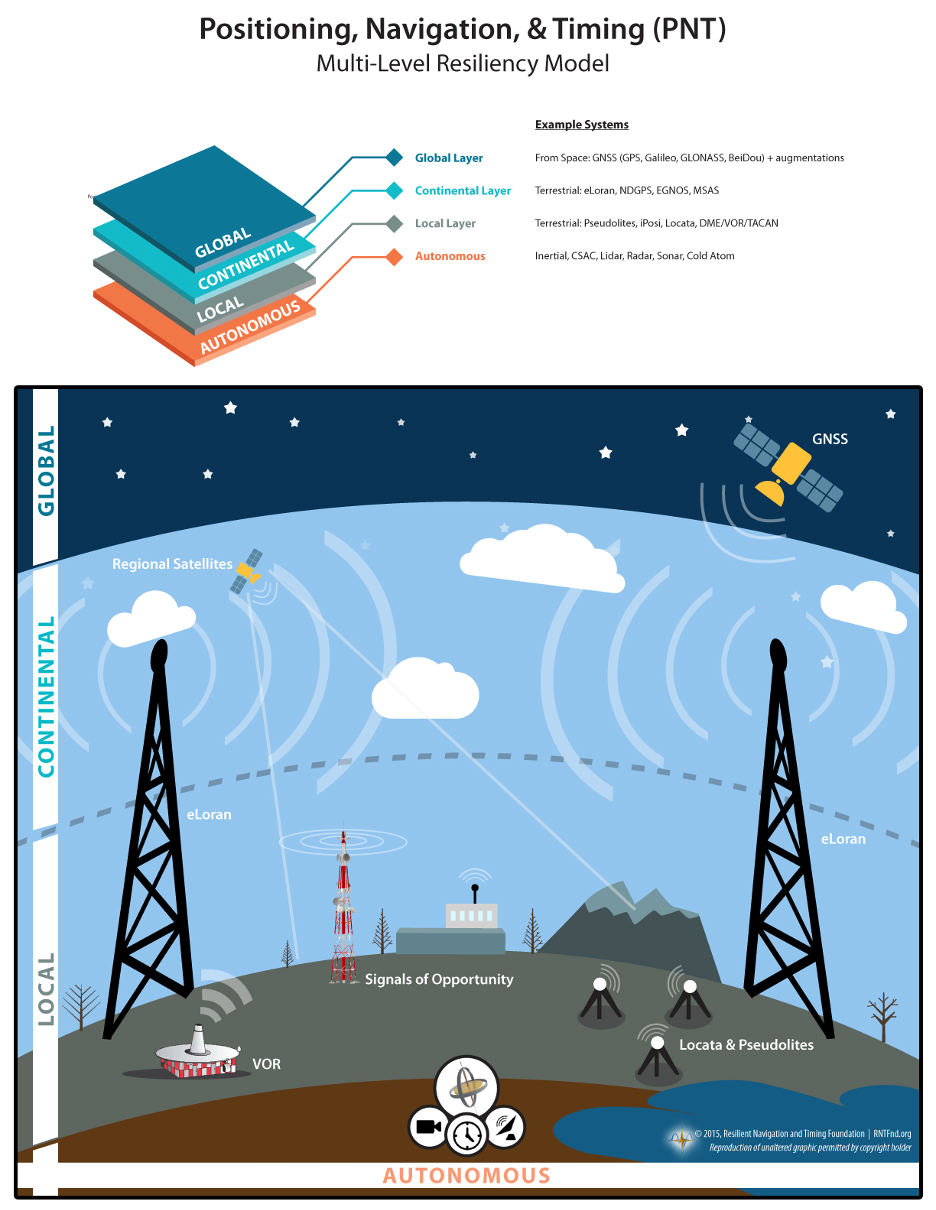
The National PNT Architecture, jointly developed by the US departments of Defense and Transportation, envisions a multitude of PNT sources ranging from GNSS provided by national governments, to inertial and clock suites acquired by users as needed.
“Many people are fond of talking about a GPS backup,” said one administration official.
“It’s more appropriate to use the plural ‘backups’ since one system isn’t going to meet everyone’s needs. Even GPS doesn’t meet everyone’s needs which is why we require complementary PNT capabilities.”
The idea that multiple redundancies are required for an essential function as long been a core principle of systems engineering. This is clearly foundational in the National PNT Architecture.
It is also a feature in more recent documents.
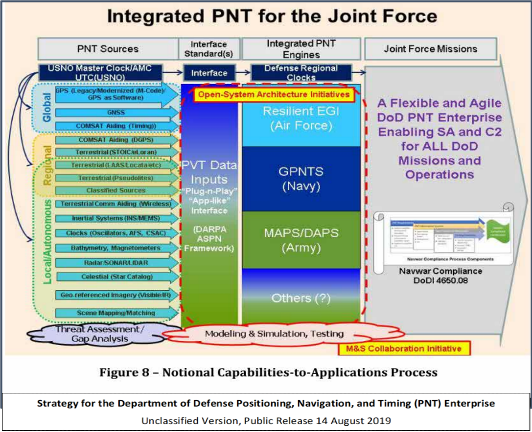
One example is the U.S. Department of Defense’s (DoD) PNT strategy publicly released in August of last year. It envisions use of a multitude of systems as a way of “Ensuring a U.S. Military PNT Advantage.”
Image: DOD
It categorizes these in three layers. A global layer of GNSS and other satellites, a regional layer that includes STOIC and eLoran, and a local/autonomous layer populated by inertial, clock, lidar, radar, scene matching and beacon-based systems.
Another project taking the architecture approach is described in detail by the recently completed MarRINav report. Sponsored by the European Space Agency, it analyzed the PNT needs of maritime commerce in the United Kingdom.
The project concluded that a “hybrid approach” using GNSS, eLoran, and the short-range R-mode VDES would be the best and least expensive combination for maritime. It also recommended a local navigation system such as Locata for port cargo operations. The study found that such a combination of systems would also benefit other transportation and infrastructure sectors.
Implementation
Yet identifying solutions is often much easier than making them happen. Especially for national projects with dozens of stakeholders. Stakeholders who may often have competing interests. And there is always the question of “Who pays?”
In the United States both the Congress and the executive branch of the U.S. government are addressing these issues, and in potentially complementary ways.
Congressional Mandates. With GPS as the cornerstone, both the DoD strategy and the National PNT Architecture show the need for one or more complementary systems to “overcome PNT capability gaps, predominantly resulting from the limitations of GPS.”
According to one senior official close to the issue, these systems need to be, “integrated with GPS and each other” and within the U.S. “serve all parts of the country — urban, rural, wilderness — even coastal maritime areas.” The idea being that they will constantly reinforcing GPS services while also serving as a safety net for users when during GPS disruptions.
The National Timing Resilience and Security Act of 2018 requires DoT to begin filling this layer in the National Architecture by the end of this year. The law, passage of which was overwhelmingly supported by both parties, mandates the department establish a difficult to disrupt, wide area, terrestrial timing system to backup (and complement) GPS timing signals. The system also must be expandable to provide navigation services. Even as a timing service, though, it has the potential to make navigation more reliable. Studies have shown that combining such a timing signal with GPS and other GNSS signals can dramatically decrease users’ vulnerability to jamming and spoofing.
The law also enables the system or systems to be established by leveraging commercial entities and expertise through cooperative agreements, public-private partnerships, and similar arrangements. These tend to be the most expeditious and least costly methods for putting such services in place. As such, they are expected to be very attractive to government program and contracting officials.
On military side, the in-process National Defense Authorization Act for 2021 requires DoD to quickly complete this part of their architecture also. Hinting that the department has failed to respond to combatant commanders “Joint Urgent Operational Needs,” it directs DoD to provide warfighters non-GPS PNT by 2023. It also directs the department to “enable civilian and commercial adoption of [these] technologies and capabilities”.
Presidential Order. The administration’s approach is outlined in a February 2020 presidential Executive Order. The order focuses on commercial entities that contract with the government, critical infrastructure, and research and development.
It calls for, within the next 24 months, agencies to “develop contractual language for inclusion … n the requirements for Federal contracts … with the goal of encouraging the private sector to use additional PNT services and develop new robust and secure PNT services.” The hope is that these new services will be adopted beyond just those companies who routinely serve government needs.
The departments of Energy, Transportation, and Homeland Security are also required to publish plans on how they will engage various critical infrastructure sectors to evaluate the degree of responsible use of PNT by each.
Also, the White House Office of Science and Technology Policy (OSTP) is tasked to “coordinate the development of a national plan… for the R&D and pilot testing of additional, robust, and secure PNT services that are not dependent on global navigation satellite systems (GNSS).” OSTP has already begun this and is seeking input from the public.
Competition and Many Players
Because PNT user needs are so varied and nuanced, most industry observers see growing opportunities for existing and potentially new providers.
“Systems and equipment that improve GNSS services, or that complement and augment GNSS are likely to find ready markets,” said Andrew Bach, a consultant on financial and other PNT issues. “User demands and needs are only going to become more sophisticated as their economic exposure increases.”
Congressional and administration focus on alternative PNT should enhance and multiply such opportunities. So, while there may be no silver bullet for solving national PNT concerns, the need for a robust and resilient architecture of PNT systems will likely mean abundant opportunities for providers.
The White House Office of Science and Technology Policy is asking for ideas on what technology to research to protect GPS. The research and development dollars are earmarked for projects that minimize or eliminate disruption to critical infrastructure from intentional and unintentional interference.
The office is seeking input “from all interested parties on the development of a National Research and Development Plan for Positioning, Navigation, and Timing (PNT) Resilience.
“The plan will focus on the research and development (R&D) and pilot testing needed to develop additional PNT systems and services that are resilient to interference and manipulation and that are not dependent upon global navigation satellite systems (GNSS).
“The plan will also include approaches to integrate and use multiple PNT services for enhancing resilience,” the RFI states.
The effort is specifically headed by the Subcommittee on Resilience Science and Technology (SRST.) “The input received on these topics will assist the subcommittee in developing recommendations for prioritization of R&D activities,” the RFI states.
Deadline for comments is 11:59 pm ET on Sept. 9.
Responses should be submitted via email to [email protected] — include “RFI Response: PNT Resilience” in the subject line of the message.
In 2018 the first-ever European Radionavigation Plan said “It is recognized that [..] GNSS should not be the sole source of PNT information. Alternative PNT systems, not necessarily using radio frequencies, should thus be put in place where the criticality of the application requires it.”
Graphic from MarRINav report showing system of systems approach to PNT resilience and reliability. (Image: Resilient Navigation and Timing Foundation)
In 2019 the European Space Agency (ESA) published a permanent open call for proposals for positioning, navigation, and timing studies and systems, including those that had nothing to do with space.
“Maritime navigation and port operations are critical for almost every nation,” said Jonathan Turner, one of the MarRINav project team. “As an island nation with a strong maritime heritage, we in the United Kingdom perhaps have an even greater appreciation of this.” Turner is co-founder of the blue economy solutions company NLA International, which led a team of eight organizations cooperating on the project.
While MarRINav focused its analysis on the United Kingdom, the intent was to provide information, and an analysis framework, that could also be used by other nations.
Maritime is one of sectors most dependent upon GNSS, according to the project reports, and a sector with great awareness of GNSS vulnerabilities and their consequences. MarRINav concludes that integrity and resilience are two of the most important parameters for maritime navigation.
Maritime is also one of the sectors most ready to integrate space and terrestrial navigation systems, according to the report’s authors. The International Maritime Organization has already introduced a performance standard for a multi-system receiver, or MSR, that will incorporate a wide variety of navigation signals.
Despite the distractions of Brexit over the last four years, the United Kingdom has been particularly focused on its vulnerability to GNSS outages.
In February of this year the UK government announced it was establishing a virtual National Timing Centre to protect the nation from the risk of GNSS failure, and in March the final MarRINav report was published.
Among the project’s findings are that:
The United Kingdom needs a comprehensive maritime PNT architecture with multiple, diverse sources to ensure continuity of maritime operations
Such a “hybrid solution” could benefit other sectors, especially if non-maritime needs were considered early in the design
New PNT systems should be terrestrial and sovereign
Establishing such a system for the UK has a very positive benefit to cost ratio
Important aspects of the new architecture are E-GNSS (Galileo and EGNOS), Enhanced Loran (eLoran) and the Ranging Mode (R-Mode) of the VHF Data Exchange System (VDES), and complemented by the development of a specific Maritime Receiver Autonomous Integrity Monitoring (M-RAIM) algorithm.
LOCATA or a similar local positioning system should be implemented at UK ports to provide a backup for container operations.
Satelles Satellite Time and Location may have potential, but its utility has yet to be demonstrated for maritime.
The PNT Coffee Talk event will be held online and is open to those interested in learning more and discussing this national priority from the industry and government perspectives.
The Executive Order, issued Feb. 12, is a federal initiative to protect critical infrastructure from GPS/GNSS jamming and spoofing threats, and other disruptions to critical PNT services. These threats can deny access to, or compromise, essential PNT data that critical infrastructure needs to operate.
This initiative, titled “Executive Order on Strengthening National Resilience through Responsible Use of Positioning, Navigation and Timing Services,” includes the following critical infrastructure: defense, homeland security, transportation, power grids, communications/mobile, precision agriculture, weather forecasting and emergency response.
Key actions include assessing jamming, spoofing and other PNT disruption risks across these critical infrastructure programs, developing customized PNT profiles to address risks, and deploying Resilient PNT technology to increase resilience.
Survey seeks feedback. Orolia asks those interested to share questions and comments and let the company know what you’d like to discuss during this PNT Coffee Talk event through an anonymous survey.
Septentrio has added to its integrated GPS/GNSS receiver portfolio with the AsteRx SB ProDirect, which delivers reliable high-accuracy positioning for machine navigation and control in challenging environments.
The AsteRx SB ProDirect dual-antenna receiver is designed as an “install-and-forget” device to provide continuous positioning for demanding industrial applications, Septentrio said. It gives machines and robotics access to heading and pitch or heading and roll information immediately on power-up. This allows for trajectory path optimization and fully informed navigation from mission start.
The AsteRx SB ProDirect is designed to provide the GNSS positioning and position-independent heading needed for robotics, machine control and similar applications. It uses either a single or dual antennas and is designed for quick integration into any machine monitoring or control system.
Contained in a single, waterproof ruggedized box, the robust receiver uses Septentrio’s LOCK+ technology, optimizing positioning and heading performance under intense mechanical vibrations, shakes or shocks.
Septentrio also offers housed GNSS/INS receivers with inertial integration for a full attitude solution, including heading, pitch and roll, on top of high-accuracy positioning. Integration of the AsteRx SBi’s inertial sensor allows continuous positioning and attitude even during short GNSS outages, which can happen near high structures or under foliage.
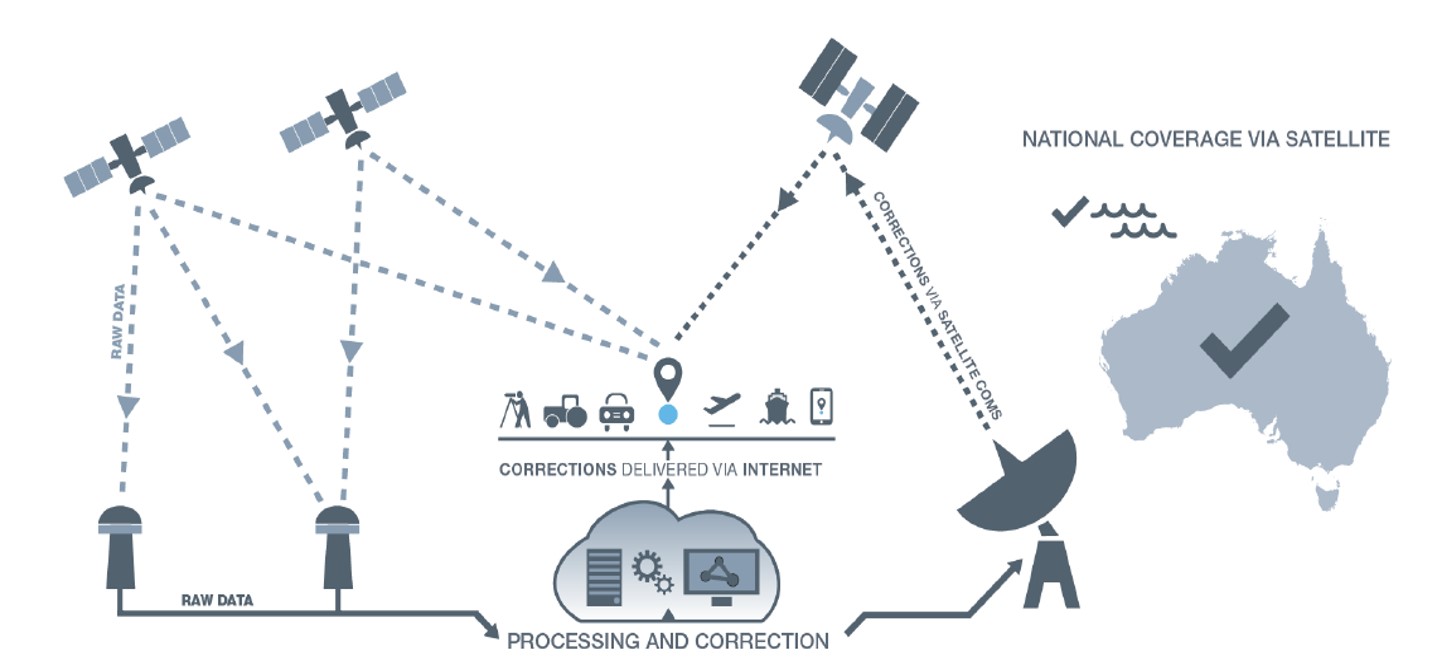
Australia and New Zealand are partnering to roll out satellite technology that will be able to pinpoint a location on Earth to within 10 centimeters, unlocking more than $7.5 billion in benefits for industries in both countries.
Prime Minister Scott Morrison and New Zealand’s Prime Minister Jacinda Ardern committed jointly to implement a satellite-based augmentation system (SBAS), to operate across Australia and New Zealand, at the Australia-New Zealand leaders’ meeting held Feb. 28.
The system will improve the accuracy of GPS and other positioning services from the current five to 10 meters to as little as 10 centimeters across Australia and New Zealand without the need for mobile or internet coverage.
The new project follows 18 months of successful trials that tested 27 projects across a range of industries. It will be delivered by Geoscience Australia and Land Information New Zealand under the joint science research and innovation treaty.
Minister for Resources, Water and Northern Australia Keith Pitt said the project, to be operating by 2023, will have significant benefits to a range of industry sectors including mining, agriculture and transport.
“We welcome New Zealand’s commitment to join Australia in rolling out this exciting new technology, which will deliver substantial economic benefits for both countries,” Minister Pitt said.
“An independent analysis by Ernst and Young (EY) has found improved positioning technology will deliver more than $6.2 billion in benefits for Australia, and more than $1.4 billion in benefits for New Zealand, over the next 30 years.
“Trial projects have also found the system can make our roads and rail systems much safer, and can improve the way farmers manage their land, crops and livestock. For the resources sector, the technology can track vehicles and improve site surveys to enable precise extraction of deposits.”
Industry, Science and Technology Minister Karen Andrews said the project will complement Australia’s other investments in space to drive economic growth and create new jobs.
“The Morrison Government is backing these types of technologies because of the positive impact they have on the lives of everyday Australians — from the discoveries that make life easier through to growing industries that create high-value jobs,” Minister Andrews said.
“Many industries stand to benefit from this technology. It could help improve safety and efficiency in aviation and shipping and will be crucial to the development of autonomous vehicles.
“This work also supports our government’s broader commitment to triple the size of the space sector to $12 billion and an extra 20,000 new jobs by 2030.”
“Diverse teams bring diverse ideas to the table, and that’s the best way to progress.”
So said Professor Sheila Rowan, the UK government’s chief scientific advisor to Scotland, opening the Royal Institute of Navigation’s 2019 International Navigation Conference. Professor Rowan’s comments set the scene perfectly. Success in navigation is no longer about just getting a fix, or even an accurate fix. To succeed as a system or application provider, diversity and collaboration are key, whether it be multiple disciplines and the skills that go with them, or a mix of ages, beliefs and backgrounds. So, what were some key messages to emerge from four days of working together?
John Pottle opens the 2019 International Navigation Conference sponsored by the Royal Institute of Navigation (RIN). (Photo: RIN)
More practical help for non-experts wanting to improve resilience in positioning, navigation and timing (PNT) is needed. The top request from delegates at the pre-conference short course was for more detailed and specific information on threats to PNT. Of particular interest were how to measure the impacts and test the merits of various mitigation approaches. In other words: how to assess risk? How to decide what steps to take?
User acceptance and regulatory/legal structures for driverless vehicles are greater challenges than the positioning and communications technology. In the UK and across Europe, projects are under way to evaluate good practices for so-called “beyond line of sight” drone flights. For driverless cars, while huge strides have been taken to enable secure and resilient absolute and relative positioning, much remains to be done. Practical issues were highlighted, such as over-cautious vehicles and a tendency for driverless cars to make occupants feel more travel sick. So work needs to be done to avoid a stressfully slow and sickly experience.
Skills and knowledge are changing — and education/training needs to, too. A major developed-world problem is that the experts with experience who have seen generation after generation of technology evolution are now in their later careers or retired. Because of the wealth of knowledge vested in these individuals — we can all think of some, I’m sure — organizations have tended to over-rely on them. A key theme of the conference closing plenary was that the community wants to do more to collaborate — that word again — to define training needs and figure out how to deliver the skills that are needed today and tomorrow.
The next couple of years bring fewer, bigger navigation conferences in Europe. The European Navigation Conference (ENC) 2020 takes place in Dresden, May 11–14, organized by the German Institute of Navigation, DGON. ENC2021 will be combined with the triennial global congress of the International Association of Institutes of Navigation (IAIN), Nov. 15–18, 2021, in Edinburgh, organized by the Royal Institute of Navigation.
Please save the dates — joining these events is rewarding and stimulating as we work together toward a more navigable world.
John Pottle is director of the Royal Institute of Navigation.