MatrixSpace has released the Portable 360 Radar, a rugged, easily transportable radar kit.
The Portable 360 Radar delivers reliable close-airspace awareness with panoramic coverage for rapid-response counter-drone operations, from safe-guarding stadiums and large public gatherings, to border security and battlespaces.
Traditional radar systems are cumbersome, slow to set up and limited in effectiveness for mobile C-UAS deployments, with high-power requirements. Instead, MatrixSpace Portable 360 Radar is low power, portable and affordable.
The MatrixSpace platform unifies threat awareness across multiple networked Portable 360 Radar systems and other sensors, without compromising local operation. By combining AI edge processing with MatrixSpace AiCloud Enterprise software, central command centers get an enhanced common operating picture and deep airspace activity analytics to assure public safety.
Major corporations and government agencies have adopted MatrixSpace Portable 360 Radar, which has excelled in rigorous C-UAS field testing including the U.S. Army’s recent xTechCounter Strike competition where it won best active sensor.
Key Features and Benefits
Low power, small footprint — a portable radar system easily transported by car that assembles in minutes.
Breakthrough affordability, enabling operators to catch hard-to-detect drones in challenging environments like dense cities and variable terrain.
Resilient AI edge-first architecture powered by sophisticated AI edge processing that continuously improves, assuring decisive operations even in congested environments.
Easy extensibility to MatrixSpace AiCloud — users can deploy one system or one hundred, all working together for enterprise command and control.
On Feb. 6, a magnitude 7.8 earthquake struck Turkiye and northern Syria creating enormous damage throughout both countries. (Image: mustafaoncul/iStock /Getty Images Plus/Getty Images)
Geographical information of urban areas is critical because it forms the basis for planning, intelligent urban modeling and disaster mapping and management. For many decades, ground surveys and aerial photographs were used as the primary tools for collecting this data. Starting in the 1990s, these methods were replaced by such advanced remote-sensing technologies as synthetic aperture radar (SAR) and ground-based interferometric radar (GBIR).
This article explores the use of software-defined radio (SDR) platforms for acquiring high-resolution SAR/GBIR images, including:
How low-cost commercial-off-the-shelf SDR platforms can be used to realize complex systems for acquiring images and processing measurements.
How different specifications of SDRs make them suitable for use in SAR applications.
Hazard Monitoring in Urban Areas
Many urban areas and critical infrastructure are in regions highly prone to natural disasters such as volcano eruptions, earthquakes, avalanches and landslides, or near man-made systems such as dams and quarries. Monitoring of surface changes and structures is integral to the mitigation of risk and ensuring public safety. Modern remote-monitoring systems allow surface displacements to be monitored without the need to access a location. With these systems, several square kilometers of Earth’s surface can be monitored at once and with high accuracy. The sub-millimeter accuracy of modern remote-monitoring technologies enables accurate measurements to be collected with impressive precision, including in rainy and foggy conditions.
Remote-monitoring systems are autonomous and can operate for a long time without human intervention. Their real-time feedback makes them suitable for use as early-warning systems. In addition, these monitoring systems can be integrated into a wide range of sub-systems, such as decision support systems that assist decision makers in assessing emergency plans and selecting the best options.
Using Radar to Measure
Details of the surface observed by a SAR satellite are encoded in the amplitude and phase of a SAR image. The amplitude component contains information about the surface roughness and terrain slope of the target area, while the phase component contains information about the elevation of the satellite.
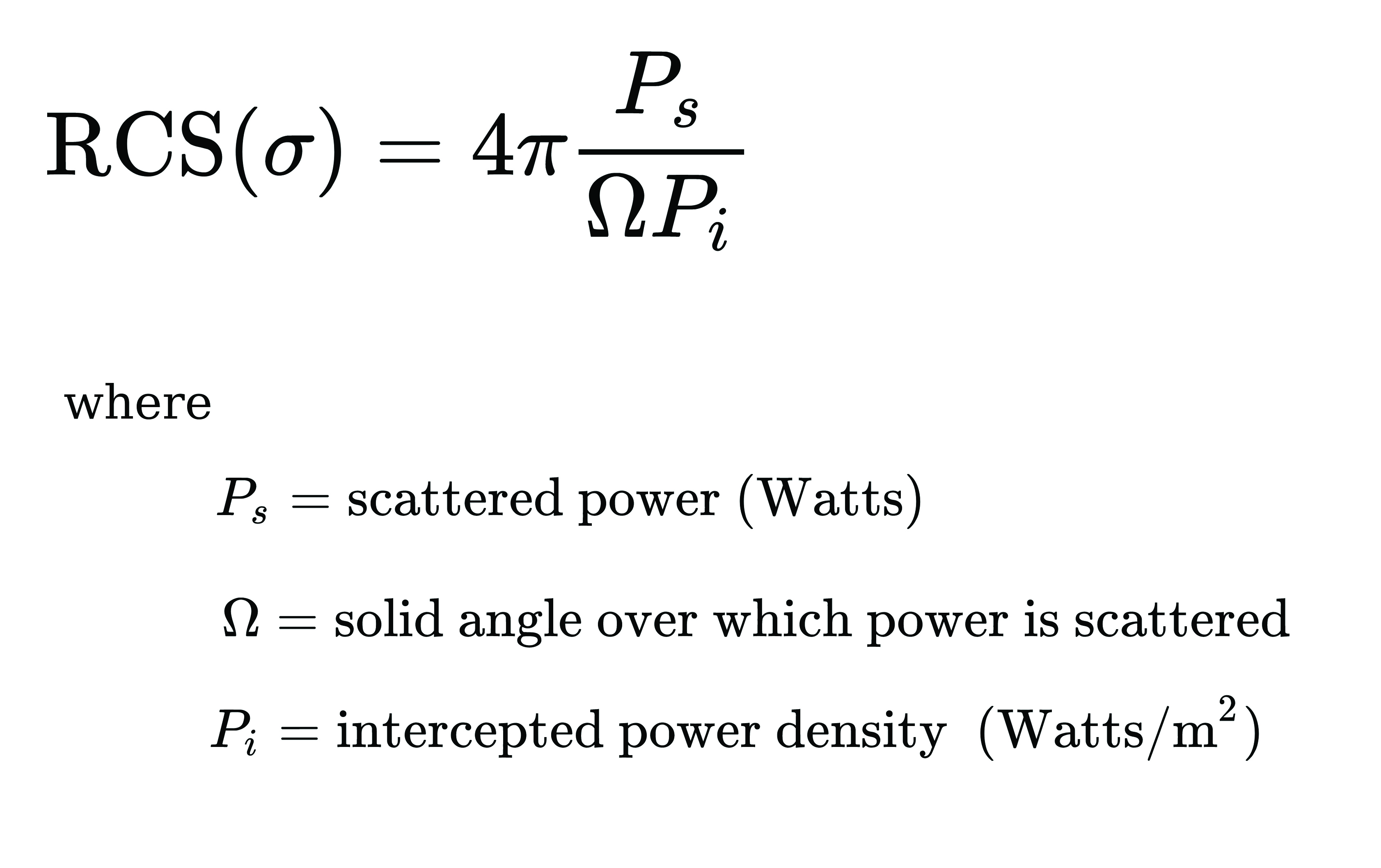
A typical SAR satellite transmits microwave signals toward a target area at an oblique angle and measures the backscattered signal. The intensity of the reflected signal is mainly determined by the roughness and the structure of the target, and the distance between the satellite and the target. This measurement is usually described in terms of the radar cross-section (RCS) parameter, which is obtained by calculating the ratio of the scattered to the intercepted signals as shown in this equation:
The RCS parameter is mainly dependent on the surface roughness and the dielectric properties of the target object.
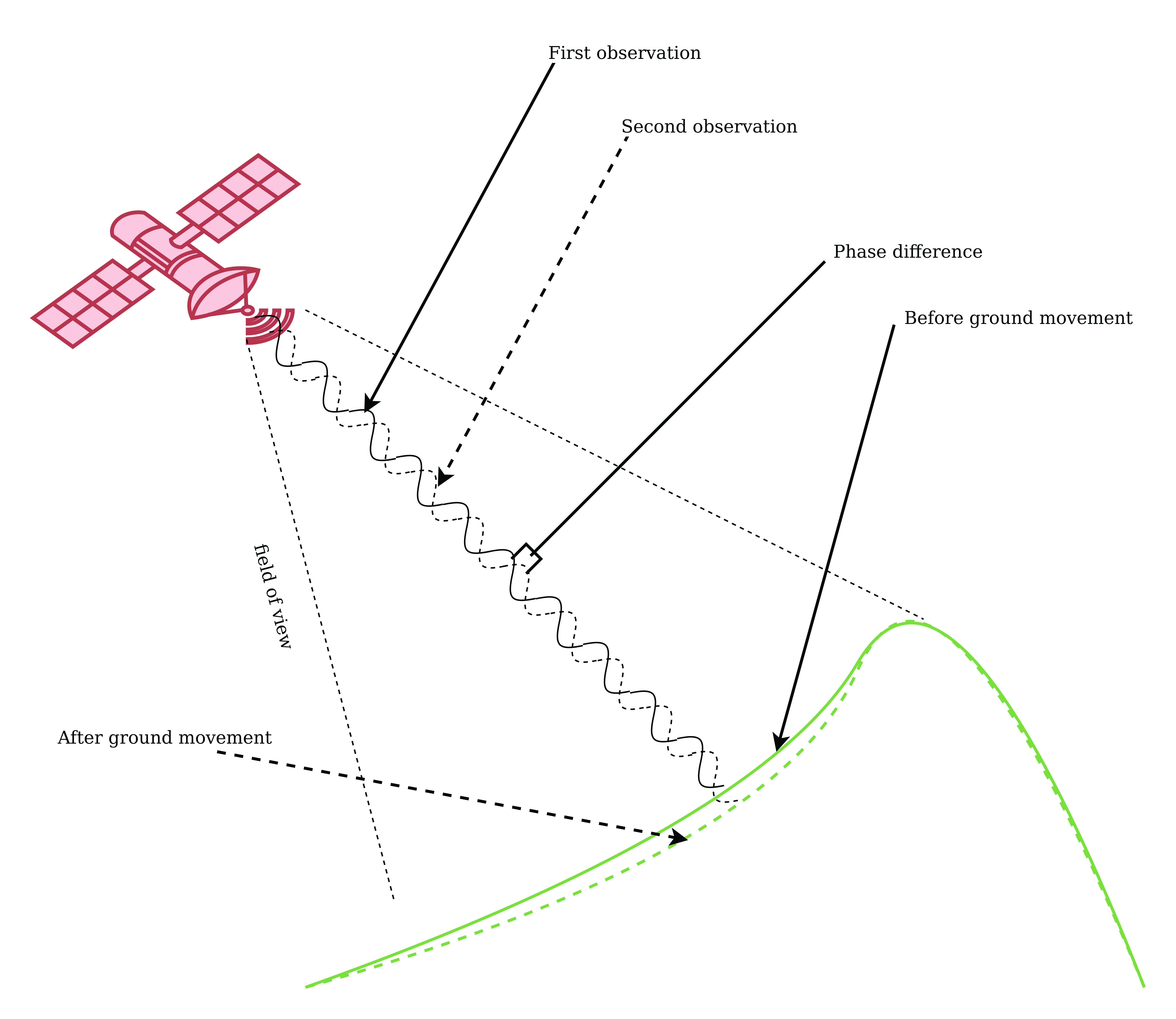
The interferometric SAR (InSAR) technique allows surface movements to be identified. These observations also can be used to measure and monitor changes associated with volcanic eruptions, tectonic activity and other geophysical processes. To identify crustal changes using this geodetic technique, at least two SAR images are required.
Figure 1. Phase shift in InSAR observations due to ground movement. (Image: Simon Ndiritu)
In differential InSAR, two images of the same location that are recorded at different times are used. If a surface movement has occurred between the first and the second acquisition, a phase shift is observed (Figure 1). The presence of interference fringes on an interferogram is an indicator of a phase shift and these fringes are summed during processing to provide a relative value of the phase change.
Ground-based SAR (GBSAR) employs the synthetic aperture radar technique to capture high-resolution images of the electromagnetic reflectivity of a target. This remote-sensing system is commonly used for monitoring civil infrastructure, buildings, mines, landslides, glaciers and more. While spaceborne SAR is capable of surveying large areas and records data over long periods of time, usually several weeks or months, GBSAR is suitable for monitoring small areas and has short sampling periods, usually a few minutes. In most surveying applications, the two remote-monitoring techniques are used together in a complementary fashion to enhance the overall performance.
The all-weather monitoring capability of satellite-based SAR makes it a popular tool for natural disaster management. Since the launch of the first SAR satellite in 1991, this technology has provided many emergency response teams with important insights on manmade and natural hazards. SAR data can be used to study different aspects of long-term behaviors of slow-moving surfaces, which is critical for planning emergency response to natural hazards such as volcanic eruptions, landslides and avalanches. SAR satellites orbit Earth at altitudes of between 500 km and 800 km and operate in the C-band (5 GHz to 6 GHz), X-band (8 GHz to 12 GHz) and L-band (1 GHz to 2 GHz). The temporal resolution of these satellites is mainly determined by their revisit periods.
Software-Defined Radio Platforms
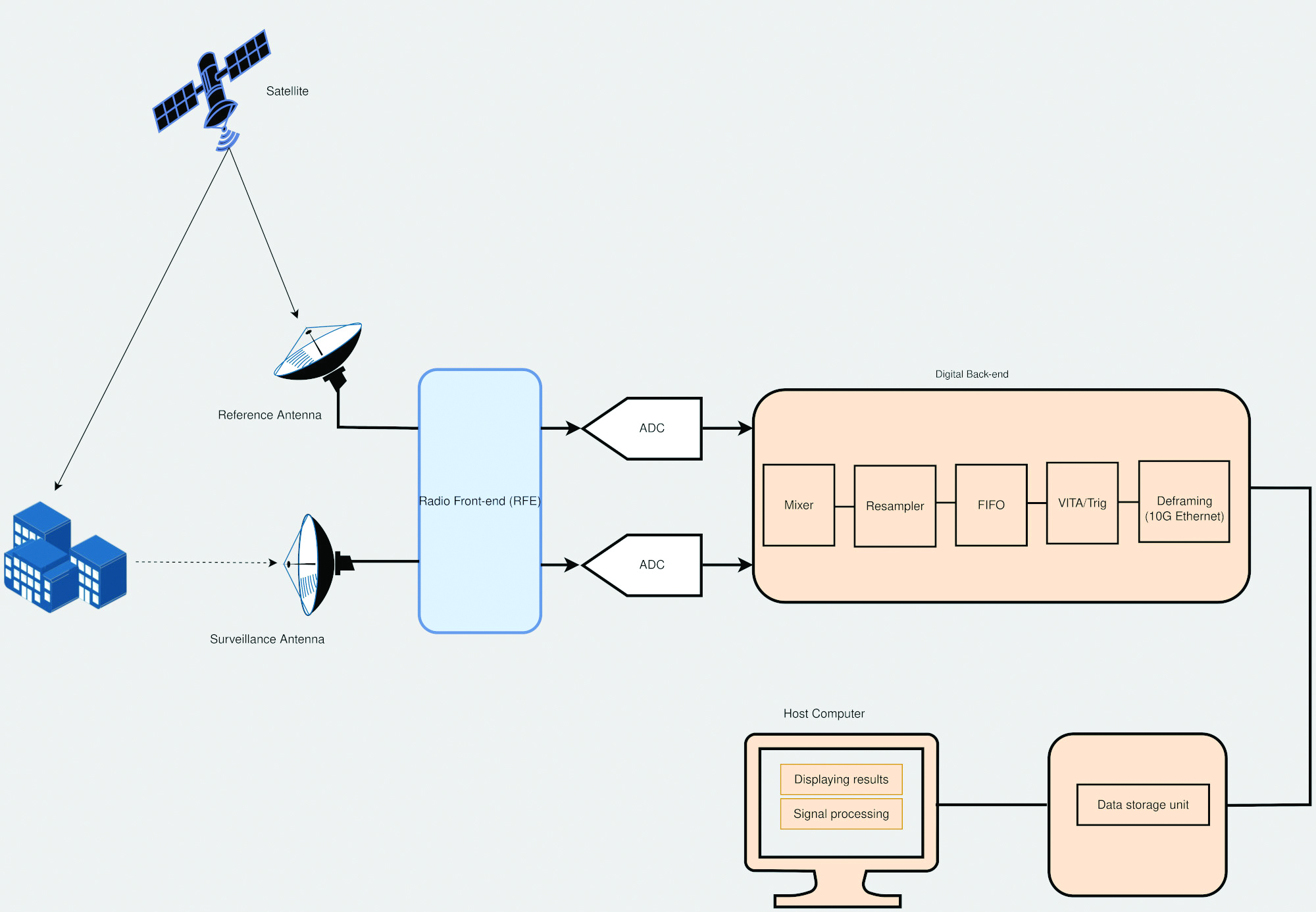
A typical SDR platform features a radio front end (RFE) and a digital back end, with the RFE performing receive (Rx) and transmit (Tx) functions and offering a wide tuning range, typically 0 GHz to 18 GHz. This range is acceptable for widely used bands in SAR applications, including L-band, C-band and X-band.
The digital back end of a high-performance SDR system features a field programmable gate array (FPGA). This FPGA offers a variety of digital signal processing (DSP) capabilities, including upconverting, downconverting, modulation and demodulation. In addition, an SDR platform offers multiple transmit and receive channels, making it suitable for implementing multi-in multi-out (MIMO) radar systems.
The architecture of SDR platforms allows them to integrate easily with a wide range of complex systems, such as SAR systems. The reconfigurability of SDRs allows upgrades and updates to be implemented without modifying the existing hardware, and can be designed to meet the size, weight and power (SWaP) requirements of an application. These features make SDRs suitable for implementing custom SAR monitoring solutions in small and large ground stations (Figure 2).
Figure 2. A simplified diagram of an SDR-based SAR system is shown, which employs a mobile-transmitter fixed-receiver passive bistatic SAR (MF-PB-SAR) architecture. (Image: Simon Ndiritu)
Integrating SDRs with SAR
A software-defined radar (SDRadar) is an SDR-based radar system that offers high flexibility and robustness. Compared to conventional radar, SDRadar offers many benefits, including the opportunity to reuse hardware, develop multi-function radar solutions, achieve faster development cycles, and have easier implementation of updates and new algorithms.
Tests with prototype SDR-based GBSAR systems have revealed the strong potential of SDR-based implementations. The MIMO architecture of an SDR platform allows realization of complex multi-frequency GBSAR systems uniquely suited for measuring displacement and other geophysical characteristics of landforms. SDR-based GBSAR systems can operate in different frequency bands and offer unmatched flexibility when it comes to signal generation and digital signal processing.
Many prototypes of airborne/satellite SAR systems based on SDR platforms have been implemented and their performance evaluated. Results have shown that they can offer better performance compared to conventional implementations. The use of multiple independent channels by SDR platforms allows the realization of compact and power-efficient multimode SAR systems, while the architecture of an SDR platform allows complex signal processing techniques such as digital beamforming (DBF), null steering and direction of arrival estimation to be implemented on FPGA.
Benefits of Integrating SDRs with SAR Solutions
Integrating SDRs into SAR systems provides many benefits. The MIMO architecture of SDR systems provides more channels than are required for SAR functions. The extra channels can be used for other applications such as satellite communications during emergencies. The wide frequency-tuning range of an SDR system allows the realization of a multi-function system with applications using different frequency bands. The reconfigurability of SDR platforms allows them to be repurposed for other applications. In addition, this reconfigurability enhances reusability, scalability and power efficiency. The low-latency FPGAs in high-performance SDR systems allow the realization of ultra-high-speed DSP algorithms for use in image processing and DBF.
Conclusion
The reconfigurability and impressive performance features of SDR platforms make them ideal for implementing scalable and flexible SAR monitoring systems for measuring land changes. The wide tuning range and MIMO architecture of SDR devices allows realization of a multi-function and multi-frequency system using a single device. In addition, the reconfigurability of SDR devices allows hardware reuse and low-cost implementation of updates and new algorithms.
Brendon McHugh is the field application engineer and technical writer at Per Vices. He possesses a degree in theoretical and mathematical physics from the University of Toronto.
Simon Ndiritu is an independent technical writer for Per Vices with a background in electrical and electronic engineer with a wealth of experience in designing hardware and firmware. He also has a passion for writing.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: Space Norway
Norway to get radar assist
Norway’s sea areas are seven times larger than its land area. Now the country is creating a radar satellite system to surveil and locate ships in waters of interest, including the High North. On Aug. 25, Space Norway signed contracts with vendors to build the MicroSAR system, which will launch in 2025. Plans are to make a constellation of radar satellites that can detect small vessels in a large area simultaneously. While the system will use GNSS for orbit tracking, the radar function is independent of GNSS during acquisition. This will solve a flaw in the Automatic Identification System (AIS) now used for maritime surveillance — estimates are that 5% of vessels either do not send out AIS information or are transmitting false information.
Photo: Yandex
Russia’s driverless autos hit the brakes
Russian driverless projects are facing hurdles following the invasion of Ukraine, reports TU-Automotive. For instance, Russian IT giant Yandex had hoped to launch robo-taxis in the United States but has suspended street tests and robotic delivery pilots and laid off employees in its U.S. office. Russian freight carriers are experiencing a shortage of new vehicles and spare parts from Western trade sanctions and countermeasures by the Russian government. Meanwhile, Russia’s pilot tests of connected road infrastructure are still taking place, according to V2X vendor Sreda Software Solutions.
Nathaniel Frissell and team. (Photo: University of Scranton)
Bunches of grapes
A University of Scranton collaborative research project will use daily Doppler shift receiver measurements to study how dawn, dusk and solar eclipses affect the ionosphere. The team, led by Nathaniel Frissell, will use a network of GNSS-stabilized and synchronized high-frequency receivers known as Grapes, developed as part of another National Science Foundation project in 2019. The last solar eclipses to traverse the continental United States until 2044 will occur Oct. 14, 2023 and April 8, 2024. “This project takes advantage of the unprecedented opportunity to study the ionospheric impacts of the 2023 and 2024 solar eclipses and the daily ionospheric variability associated with dawn/dusk transitions,” Frissell said. A better understanding of the effects of ionospheric disturbances is imperative, because the changes affect GNSS navigation and communications systems.
Screenshot: Anonymous TV
Moscow navigation fail
The hacker collective Anonymous managed to disrupt Yandex’s Moscow taxi fleet on Sept. 1, sending dozens of taxis to an address on Kutuzovsky Prospekt. The hacking caused a two-hour traffic jam in the center of Moscow near the Stalinist-era building Hotel Ukraina (Hotel Ukraine), now a Radisson. Hackers likely bypassed Yandex’s safety measures, creating multiple fake orders that prompted drivers to simultaneously go to the same location.
Radar has been around since the late 19th century, but today it is poised to revolutionize how autonomous vehicles (AVs) navigate the road. From its nautical origins as a tool to detect the location of ships in heavy fog to being a cost-effective way to prevent collisions in self-driving cars, radar has a wide range of applications.
For more than 30 years, carmakers and drivers have embedded radar in vehicles to assist with automated cruise control, automatic emergency braking, parking, and more. This effective, hardy technology plays a critical role in the driver experience today, and the same hardware will be used to help AVs navigate the road soon.
I believe that the next chapter of radar use in vehicles will be in the AV market, where software powered by artificial intelligence (AI) will use radar sensors to read a vehicle’s surroundings and get riders safely to their destination.
Radar Is a Market-Proven Hardware Solution
Radar has been around for so long, and the sensors we rely on in our vehicles every day are so reliable, that most drivers are not even aware that they have radar to thank for the assist on their perfect parallel parking job.
In this era of auto innovation and smart tech, the benefits of turning to this proven hardware solution abound:
Radar can perform well in poor weather conditions.
It is cost-effective, especially when compared to lidar and camera-based options.
Thanks to its low power requirements, adding radar sensors does not significantly impact a vehicle’s energy budget.
It is market-proven hardware that is robust and reliable in the field.
While competing technologies such as lidar are still years away from demonstrating that they can stand up to weather conditions and the toll that mileage takes on equipment, there is no question that radar sensors are up for the challenges of the road.
The flip side of this coin is that we also have the benefit of knowing the limits of traditional radar technology: It has poor spatial resolution, limited sensitivity, and a narrow field of view. However, this hardware can be greatly enhanced with the right software boost.
An Oculii sensor placed at the front corner of a vehicle. (Photo: Oculii)
Unlocking the Potential of Radar with AI
Until recently, the best way to improve radar technology was to add more antennas until you got the resolution quality you were seeking. While this approach solves the problem of resolution, it introduces two other problems:
Adding antennas exponentially increases a radar’s complexity, power consumption and size, while only improving performance linearly.
In turn, this added complexity significantly increases the radar’s cost.
Consider the F-35 fighter jet, which relies on a radar system that costs more than the jet itself. While adding antennas may be a reasonable solution for military-operated airplanes, the consumer AV market would never tolerate the consequent cost increases. However, there is a way that existing automotive radars can be augmented with AI software to improve resolution, without increasing cost, size or power.
In the same way that AI software transformed what the automotive manufacturers were able to achieve with camera hardware, AI software can revolutionize how radar hardware is used for navigation in AVs.
Traditional radar sensors emit a constant, repetitive signal that delivers a reliable but low-resolution result. By using innovative AI software to emit an adaptive phase, modulated waveform that changes in real time, the resolution of traditional radar can be increased by up to 100 times. The key to transforming how we use radar hardware is all in the software.
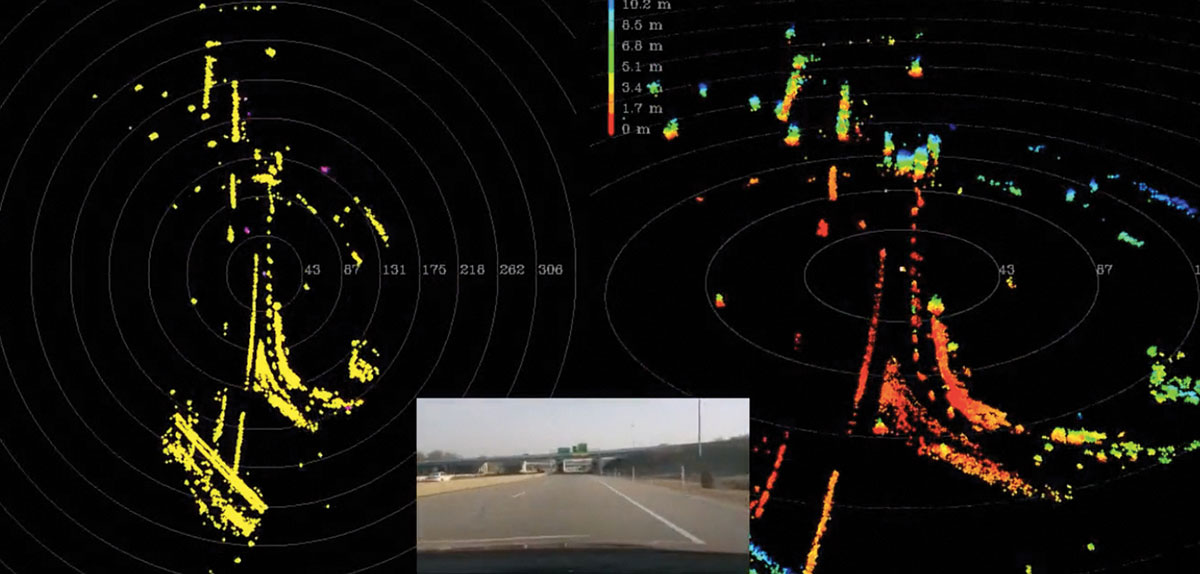
street view of a driving car (center). At right, the same view is shown with high-resolution radar, with 400+ m of range with precise Doppler/point in all weather conditions. At left, is the view using a standard lidar camera, which has >100 m of range, no Doppler and weather limitations. (Image: Oculii)
Radar with AI
Reliable sensors with AI software can enable autonomous functions by augmenting the hardware that is already in today’s vehicles. What makes this solution so exciting is that it does not require a design overhaul: the smart sensors in question fit within existing radar packaging.
Augmenting radar hardware with AI can significantly improve performance while reducing the cost to the consumer. This formula — better performance at a lower price tag — has the potential to greatly accelerate the speed with which AVs make it safely to the consumer market and to revolutionize the automotive industry.
Rather than pushing forward with the development of costly alternatives that are prohibitively expensive for the consumer market, intelligent radar sensors can bring AVs to the road sooner and for more drivers.
Steven Hong is the founder and CEO of Oculii, a high-resolution radar company enabling the next generation of autonomous systems. Powered by AI, Oculii software increases the resolution of commodity radar hardware by up to 100 times and works in any environment.
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following four focused on autonomous vehicle positioning for automobiles on city streets. The papers are available at www.ion.org/publications/browse.cfm.
Digital Maps with Tethered Positioning
The authors propose a new method for tight integration of digital map and dead-reckoning (DR) system (inertial measurement unit plus wheel odometer) to provide reliable navigation solutions in challenging GNSS environments for extended periods. Integrated DR and GNSS have been widely used as the backbone of any navigation system for the internet of things (IoT) and vehicle navigation applications. Dollar-level micro-electro-mechanical system (MEMS) inertial measurement units (IMUs) aided by vehicle-wheel odometers have been recently used as low-cost DR systems to bridge GNSS gaps in harsh environments, such as urban canyons, tunnels and under bridges.
However, DR drift errors rapidly increase over time and cannot satisfy most IoT and land-vehicle navigation requirements. Plus, the GNSS receiver may fail to provide accurate position or even experience a complete outage for more than 15 minutes, causing the tethered positioning error to reach several hundred meters. Because land vehicles are supposed to travel on roads, feedback from a digital map can be used to constrain their position.
The authors used a fuzzy-logic map-matching algorithm to identify the correct road segment on which the vehicle moves. A feedback filter senses a correct map-matched position as well as the road segment as measurement updates to the Kalman filter (KF) of the tethered positioning system. The proposed tight integration of digital maps and a DR system is evaluated using datasets collected by Profound Positioning Inc. in Calgary, Alberta, Canada. Results show the proposed method has an average of 0.15% of relative horizontal position error for Calgary datasets — a considerable improvement over the tethered-solution-only with 3.3% of relative horizontal position error. The average azimuth error of the proposed system is 1.3 degrees, while the tethered positioning system shows an average azimuth error of 9.7 degrees.
Citation. Yashar Balazadegan Sarvrood, Haiyu Lan, Aboelmagd Noureldin, Naser El-Sheimy and Profound Positioning Inc., Calgary, Alberta, Canada. “Tight Integration of Digital Map and Tethered Positioning and Navigation Solution for IoT applications and Land Vehicles.”
5G Signals for Opportunistic Navigation
This paper presents a navigation framework in which 5G signals are used for navigation purposes in an opportunistic fashion. A carrier-aided code-based software-defined receiver (SDR) produces navigation observables from received downlink 5G signals. The SDR produces navigation observables from 5G signals and a navigation filter in which the observables are processed to estimate the user equipment’s position and velocity.
An experiment was conducted on a ground vehicle to assess the navigation performance of 5G signals. In the experiment, the vehicle-mounted receiver navigated using 5G signals from two 5G base stations (also known as gNodeBs, or gNBs) for 1.02 km in 100 seconds. The proposed 5G navigation framework demonstrated a position root-mean-squared error of 14.93 m, while listening to signals from only two gNBs.
Citation. Ali A. Abdallah, Kimia Shamaei and Zaher M. Kassas, “Assessing Real 5G Signals for Opportunistic Navigation.”
Using Low-Cost Onboard Sensors
For autonomous vehicles, accurate positioning must be ubiquitous — reliably available at all times and in all places in which the vehicle is expected to operate. While GNSS commonly provides the basis for absolute positioning, it suffers from the problem of availability whenever a direct view of enough satellites is not possible. To address this failure mode, additional complementary sensors can be added to the overall navigation solution through a technique known as sensor fusion. Sensors such as inertial measurement units (IMUs), cameras, lidars, radar and more can be selected in such a way that the individual shortcomings of each sensor are mitigated, and the overall robustness and reliability are improved.
Although current autonomous-vehicle applications employ sensor-fusion techniques, they tend to rely on high-performance sensors to meet the accuracy requirements. These high-performance sensors tend to induce a much higher cost burden than would be acceptable for commercial production, and therefore make mass autonomy too expensive.
This paper focuses on using the lower cost sensors already available on most modern vehicles. These include low-resolution odometry and consumer-grade IMUs currently used for dynamic stability control and wheel-slip detection. A novel approach for combining vehicle speed, steering angles, transmission settings and multiple odometry inputs is presented along with achievable results while operating under a GNSS-denied environment. The test trajectory mimics a typical parking structure with many corners and short, straight segments. The only a priori information required for the filter is the wheel track and wheelbase (separation distance of the wheels).
A 90% performance improvement compared to the stand-alone GNSS/INS solution was observed during GNSS outages of up to 30 minutes. Furthermore, up to a 50% improvement was observed when comparing the multi-odometry to the single-odometry outages during the same 30-minute outage condition. Beyond GNSS outage performance, this paper shows how the use of the extra input to the filter can improve the positioning system’s protection levels to allow for more frequent engagement of the autonomous navigation system.
Citation. Ryan Dixon, Michael Bobye, Brett Kruger and Jonathan Jacox, “GNSS/INS Sensor Fusion with On-Board Vehicle Sensors.”
Radar and INS/GNSS
An autonomous vehicle requires a ubiquitous, accurate, precise and reliable localization system. Many sensors can be used for positioning and navigation, each with its strengths and weaknesses. Inertial measurement units (IMU) are usually used to build inertial navigation systems (INS). INS can be accurate for short durations; however, an INS accumulates errors and loses its accuracy quickly, especially when using low-cost MEMS-based sensors. GNSS can provide an absolute position and velocity to update the INS over time. A barometer provides absolute elevation information, and an odometer provides a speed update.
An integrated navigation solution consisting of an IMU, a GNSS-RTK receiver and odometer can perform well in open-sky areas and on highways. This system can achieve lane-level accuracy most of the time based on the condition of the sensors and the quality of the measurements. However, in downtown and urban environments, the degradation, multipath and blockage of the GNSS signal leads to poor performance for such an integrated navigation system, which is challenged to maintain lane-level positioning.
This paper presents a version of AUTO (formerly known as Coursa Drive), a real-time integrated navigation system that provides an accurate, reliable, high-rate and continuous navigation solution for autonomous vehicles by integrating INS, RTK GNSS, odometer and radar sensors with TomTom’s HD Maps. AUTO performs a tight nonlinear integration of the radar data and maps with the INS/GNSS/odometer system.
Results demonstrate that radar measurements and HD Maps can be tightly integrated with INS/GNSS in an effective manner, such that the integrated system can provide a high-rate, accurate, reliable and robust navigation solution. This is a crucial requirement for realizing a fully autonomous vehicle that can operate in urban environments under a wide range of conditions, including adverse weather and lighting conditions, even in downtown areas with degraded or denied GNSS signals.
Citation. Abdelrahman Ali, Billy Chan, Amr Shebl Ahmed, Medhat Omr, Dylan Krupity, Qingli Wang, Amr Al-Hamad, Jacques Georgy and Christopher Goodall, “Tight Coupling Between Radar and INS/GNSS with AUTO Software for Accurate and Reliable Positioning for Autonomous Vehicles.”
For the past decade, widespread deployment of autonomous vehicles (AV) has been just over the horizon — that imaginary line that recedes as you approach it.
It has been delayed mainly by technical issues, which will eventually be followed by legal and regulatory ones, mainly regarding liability, and by a struggle to gain public acceptance. When they finally reach the mass market, however, AVs will reduce traffic fatalities by at least an order of magnitude because they do not get distracted, drunk, drowsy or enraged and are much better able than humans to gauge distances and speeds.
Additionally, they will be able to communicate with each other and with the infrastructure, which will not only further improve safety but also reduce congestion and fuel consumption via the adoption of techniques such as convoying.
Logically, even if AVs only somewhat reduced traffic fatalities (about 38,000 per year in the United States), the public should welcome them with open arms. In reality, though, the reaction to even a single death caused by an AV — like the one in Tempe, Arizona, in March 2018 — can set AV deployment back years.
Therefore, car manufacturers are challenged to develop AVs that can navigate extremely safely in a wide range of traffic, road and weather conditions. For more than a century, human drivers have routinely managed sudden obstructions, poor visibility and dangerous behavior by other drivers that still bedevil their new robotic counterparts, despite the sensors, microprocessors and algorithms at their disposal.
The primary technological obstacle to widespread deployment of AVs on roads is “the complexity of the system and the amount of time that it takes to develop a functionally safe autonomous vehicle,” said Steve Ruff, general manager of Trimble’s On-Road Autonomy Division, which develops positioning solutions for autonomous vehicles that operate on public roadways. He cites the time required to develop “a comprehensive, safe, autonomous vehicle technology stack” and points out that “we are on the verge of going from level two to level three, which requires the driver to stay engaged in the driving experience in case the autonomous system has a problem.”
Multiple sensors
While AV developers are exploring different ways of obtaining reliable sub-centimeter positioning accuracy, all generally rely on collecting data from multiple sensors on the vehicle and applying an algorithm to synthesize the data in real time and generate a continuous, accurate position. Computer vision, radar and lidar play important roles in an AV by perceiving its surroundings and localizing it to an a priori map. This functions well in feature-rich urban environments, but can degrade in sparse highway settings.
Radar has good ranging accuracy, but is unable to detect and recognize traffic signs and road markings. Lidar has even greater ranging accuracy but is challenged in featureless areas, such as straight highways and country roads. Digital cameras are good for detecting objects and navigating in tunnels and urban canyons, but, like lidar, are less effective on featureless roads and in low visibility conditions (rain, fog, darkness, snow, sun glare).
Plus, they are challenged by the absence of road markings or the presence of construction. Inertial navigation systems (INS), while excellent at compensating for brief GNSS outages, can only guide vehicles for short stretches due to their inherent drift. (INS are essential on aircraft and vessels, whose attitude is constantly changing, but that is not relevant for vehicles, which travel essentially flat relative to, and at a constant distance from, the road surface.)
GNSS and Corrections
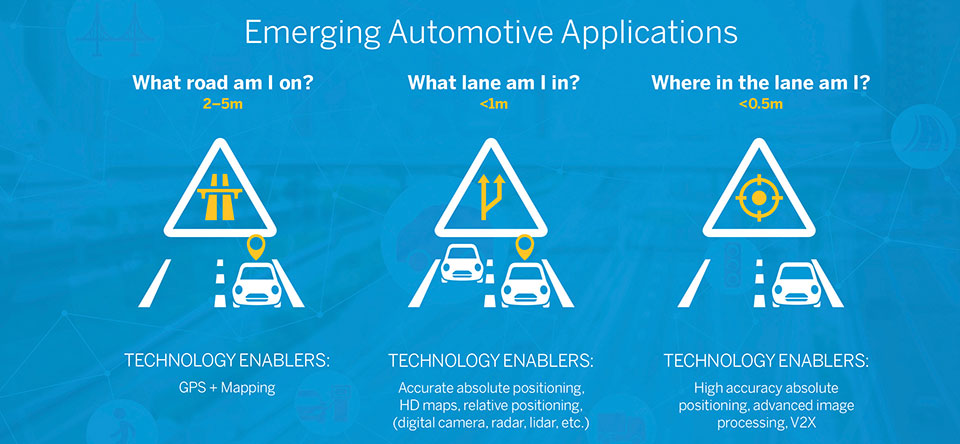
Satellite navigation plays a central role in an AV. At a minimum, it guides it from a trip’s origin to its destination, including stops or waypoints in between, the same way it would advise a human driver. It also continuously alerts the vehicle to upcoming stops, slowdowns, turns, congestion and other challenges that are already mapped—whether long in advance by map makers or moments earlier via crowdsourced updates. Finally, if sufficiently accurate, it can steer the vehicle to keep it in the center of its lane and to make smooth lane changes and turns. Determining on which road a vehicle is requires an accuracy of less than 5 meters; determining in which lane it is requires an accuracy of less than 1 meter; and determining where in the lane it is requires an accuracy of less than 0.5 meters.
Two kinds of GNSS corrections are commonly used for AVs: real-time kinematic (RTK) and precise point positioning (PPP). RTK, which is generally accurate to the centimeter level, relies on ground-based reference stations at fixed, surveyed locations that process and transmit error-corrected signals to receivers within a 10- to 20-kilometer range, typically in real-time via a cellular link. PPP, which is accurate to the tens of centimeters, uses a global network of ground stations to generate an accurate signal, and transmits it to subscribers via the internet or geostationary satellites. However, the receiver in the vehicle needs 20 to 60 minutes to align with the PPP signal before it can rely on it.
Both RTK and PPP are established in industries such as mining, construction and precision agriculture, where vehicles operate in controlled environments with little or no traffic. AVs on public roads present a far greater challenge. A car’s typical range far exceeds that of any RTK base station, and base stations can also have down time, while in-vehicle systems must use multi-frequency receivers to reduce the convergence time of the PPP signal. In case of outage of either the GNSS signal or the correction signal, the vehicle’s system must rely on data from its other sensors and recover swiftly from the error state.
Trimble’s RTX is road ready
The first PPP service in commercial use for passenger vehicles is Trimble’s RTX, which provides real-time, centimeter-level positions via IP/cellular connection or satellite broadcast worldwide. It delivers positioning via satellite to GM’s Super Cruise, a hands-free driver assistance feature for use on limited access freeways.
“We’re GNSS receiver-agnostic,” said Steve Ruff of Trimble’s On-Road Autonomy Division. “We’ll use any receiver that’s preferred by the OEM building the AV.”
Image: Trimble
Trimble, he recalled, became GNSS agnostic with regard to automotive navigation nearly 15 years ago, when it decided to get out of the commercial-grade or consumer-grade GNSS business. “It has worked out quite well, because not only can we meet the quality costs and performance targets of our OEM customers, it also allows us to do what we’re good at. We can take our positioning solution, adapt it to work with any measurement engine, and put together a solution that fits the OEM’s requirements just right.”
Automotive companies, Ruff explained, generally have certain requirements for the GNSS receiver, including certain standards for application-specific integrated circuits (ASIC) and automotive safety integrity level (ASIL), as well as meeting their accuracy requirements. “So, if the receiver has suitable code and carrier phase measurements that can support their accuracy level, then that will be the third requirement for the receiver for the automotive segment.”
For off-road vehicles for agriculture, construction and mining, Trimble only uses its own receivers, said Thomas Utzmeier, general manager of the company’s Off-Road Autonomy Division. Their requirements center on precision, position availability in challenging environments, and integrity of the position. “In the use cases on which we are working,” Utzmeier said, “we certainly see sub-decimeter accuracy. We are targeting probably three, four, sometimes five centimeters.” In more challenging use cases, GNSS plus sensor fusion — including INS and optical data — maximizes position availability and accuracy, he explained.
For the on-road segment, Ruff’s division offers a “positioning stack” that includes corrections, the GNSS position algorithm and inertial fusion. “Then we provide services to help the OEMs take our software and integrate it on the platform of their choice.”
Orolia, through its Orolia Government Systems business, has been selected by Raytheon Missiles & Defense to support the U.S. Lower Tier Air and Missile Defense Sensor (LTAMDS) radar program with its low SWaP (size, weight and power), rugged time and frequency system.
Defeating hypersonic weapons
An artist’s rendering of the Lower Tier Air and Missile Defense Sensor (LTAMDS), a next-generation radar meant to help defeat advanced threats like hypersonic weapons. (Image: Raytheon/Orolia)
The LTAMDS system — an advanced air and missile defense radar — will help the U.S. Army defeat advanced threats, including hypersonic weapons. It is a radar designed to defeat advanced and next-generation threats including hypersonic weapons, or those that fly faster than a mile a second.
LTAMDS has three antenna arrays — a primary array on the front, and two secondary arrays on the back. They work together, detecting and engaging multiple threats from any direction at the same time. This results in a battlefield without blind spots, according to Raytheon.
LTAMDS’ primary array is about the same size as the array for the Patriot Air and Missile Defense System, but it has more than twice the power. It is designed for the U.S. Army’s Integrated Air and Missile Defense system, but it will also preserve existing military customers’ investment in the Patriot system.
Raytheon Missiles & Defense was selected by the United States Army in October 2019 to provide the next-generation LTAMDS.
Timing from Orolia
Orolia was chosen for the LTAMDS program based on its core expertise in resilient timing and configurable ruggedized PNT systems for challenging environments, together with its proven track record of successfully delivering time and frequency platforms for other Raytheon Programs of Record.
Orolia was the first company to receive approval for a time and frequency reference system on the Defense Information Systems Agency (DISA) Department of Defense Information Network (DoDIN) Approved Products List for network interoperability, with its flagship SecureSync system.
“Ultra-precise mission timing and sync technology are fundamental building blocks for the Resilient PNT systems that warfighters rely on for continuous operations in contested environments,” said Hironori Sasaki, president of Orolia Defense & Security. “We are proud to be a Raytheon Missiles & Defense partner on LTAMDS and other programs that utilize GPS signals for timing, frequency and network synchronization across critical military systems.”
From critical timing solutions to GPS/GNSS simulation, interference detection, and mitigation, Orolia is an industry leader in end-to-end NAVWAR and Resilient PNT solutions to protect, augment and strengthen military systems for GPS-denied environments.
Orolia Defense & Security provides resilient PNT solutions and custom engineering services to U.S. government agencies, defense organizations, and their contractors, and is authorized to work on the full spectrum of U.S. government classified and unclassified projects.
Orolia, a provider of resilient positioning, navigation and timing (PNT) solutions, announced that its SecureSync time and synchronization servers have been selected to support enroute radar systems across the U.S.
The selection comes as part of the Federal Aviation Administration’s (FAA) move towards a Next Generation Air Transportation System (NextGen). NextGen is about halfway through a multi-year investment and implementation plan.
The FAA plans to keep rolling out NextGen technologies, procedures and policies through 2025/2030 and beyond.
While NextGen will rely heavily upon GNSS to increase capacity, efficiency, and safety in the National Air Space (NAS), many technologies including legacies such as radar will be integrated into the system for maximum robustness to error and disruption.
The FAA employs a variety of radar types for short-, medium- and long-range air traffic control requirements. These diverse radars require different types of timing signals and outputs to suit their operations.
SecureSync. Orolia’s SecureSync provides the necessary timing outputs and signals to meet these requirements. The time server’s ability to provide resilient, accurate and reliable timestamps for the data that it receives from radars is used to quickly organize the data for the aircraft control user interface.
The only time and synchronization device approved by the Defense Information Systems Agency (DISA) for use in U.S. Government networks, Orolia’s SecureSync provides reliability, security and flexibility to synchronize critical aviation operations. SecureSync combines multi-GPS/GNSS signal synchronization, options for alternative signals and BroadShield GPS anti-jamming/spoofing protection for transportation systems. SecureSync combines Orolia’s precision master clock technology and secure network-centric approach with a compact modular hardware design.
The FAA selected Orolia for the competitive program based on its proven timing and synchronization technology and its ability to offer multiple output options as commercial off-the-shelf (COTS) products that do not require additional research and development time or investment.
“Consistently accurate timestamps and the synchronization of thousands of real-time flight data points are essential for safe and efficient enroute air traffic operations,” said Jean-Yves Courtois, CEO of Orolia. “Orolia is proud to support the FAA’s radar data and aircraft control user interface requirements to improve air travel services nationwide.”
More About the SecureSync COTS Product. Built-in time and frequency functions are extended with up to 6 input/output modules. Included with the base unit is a 1PPS timing signal aligned to a 10 MHz frequency signal without any 10 MHz phase discontinuity.
A variety of internal oscillators are available, depending on requirements for holdover and phase noise. On-board clocks synchronize to a variety of external references as standard, factory-installed or upgradable options.
Users may add alternate signals of opportunity to GPS or GNSS input references to improve resilience, or use them for indoor applications and choose from a variety of option cards to add to configuration of timing signals, including additional 1PPS, 10 MHz, time code (IRIG, ASCII, HaveQuick), other frequencies (5 MHz, 2.048 MHz, 1.544 MHz), telecom T1/E1 data rates, multi-network NTP and PTP. Modules can be customized for exact requirements.
To support network time synchronization, SecureSync supports the latest features of network time protocol (NTP) and precision time protocol (PTP, IEEE-1588v2). An optional multi-port NTP configuration allows for operation across 4 isolated LAN segments. Up to 6 PTP ports can be added to operate in various PTP deployments.
SecureSync is a security-hardened network appliance designed to meet rigorous network security standards and best practices. It ensures accurate timing through multiple references, tamper-proof management and extensive logging. Robust network protocols are used to allow for easy but secure configuration.
Features can be enabled or disabled based on network policies. Installation is aided by DHCP (IPv4), AUTOCONF (IPv6), and a front-panel keypad and display. The 1 RU chassis supports multi-GNSS (GPS/ Galileo/GLONASS/BeiDou/QZSS) input.
Options include SAASM, supporting L1/ L2, available for authorized users and required for the US DoD, and BroadShield GPS jamming and spoofing detection. The unit is powered by AC on an IEC60320 connector. DC as back-up, or primary, is available.
Synthetic aperture radar (SAR) imagery from Maxar’s MDA RADARSAT-2 satellite will become available to SecureWatch subscribers on Oct. 1, according to DigitalGlobe.
SecureWatch, DigitalGlobe’s cloud-based geospatial intelligence (GEOINT) platform, will now combine the company’s high-resolution optical imagery and MDA’s SAR imagery in one platform, enabling defense and intelligence analysts to deliver actionable insights to decision makers regardless of weather and light conditions, the company said.
Maxar’s MDA will refresh hundreds of global sites on a weekly basis using RADARSAT-2’s Wide Ultra Fine format (3 meter resolution, 50 kilometer scene width).
RADARSAT-2 imagery allows users to observe features and changes that go undetected using other imaging techniques, and provides day and night coverage regardless of weather.
SecureWatch users can access timely RADARSAT-2 imagery using current subscription plans. When combined with 30 cm optical imagery, analysts will have an even more uniquely powerful and reliable toolset to perform analysis to make decisions with confidence, the company said.
“Adding RADARSAT-2 imagery to SecureWatch is a perfect demonstration of Maxar Technologies’ unique promise: create valuable, integrated and innovative solutions that address customers’ critical challenges,” said Mike Greenley, group president of MDA. “MDA’s RADARSAT-2 information has played a key role in supporting security missions for over two decades, and partnering with our sister company, DigitalGlobe, immediately enhances our offerings and expands our global reach.”
“SecureWatch subscribers now have an exciting new tool to enrich GEOINT gathering and decision-making,” said Dan Jablonsky, DigitalGlobe president. “Combining SAR and optical imagery takes analysts’ abilities to the next level to deliver powerful insights into what’s happening in their areas of interest and allows them to save lives, resources and time.”
Leica Geosystems showed off its Zeno GG04 smart antenna and DS2000 Utility Detection Radar at the 2017 Esri User Conference, which took place July 10-14 in San Diego, California. The Zeno GG04 improve mobile devices’ GNSS accuracy with Real-Time Kinematic (RTK) and precise point positioning (PPP), while the Leica DS2000 Utility Detection Radar detects and positions shallow and deep targets simultaneously.
Analog Devices and Renesas Electronics Corporation are collaborating on a system-level 77/79-GHz radar sensor demonstrator to improve advanced driver assistance systems (ADAS) applications and enable autonomous driving vehicles.
The new demonstrator combines the RH850/V1R-M micro-controller from the Renesas autonomy Platform and ADI’s Drive360 28nm CMOS RF-to-bits technology.
The system-level operation of these two technologies will enable earlier detection of smaller and faster moving objects at greater distances, according to the companies. It will also lower radar system integration efforts and reduce evaluation risks, development cost and time to market for automotive OEMs and Tier One suppliers, the companies said.
Analog Devices Drive360 28nm CMOS RADAR technology platform builds on the company’s established ADAS, MEMS, and radar portfolio to enhance sensor performance for ADAS applications with the world’s first automotive radar technology based on advanced 28nm CMOS with RF performance for target identification and classification. High output power enables greater range and identification of smaller objects, while lowest phase noise enables best unambiguous detection of smaller objects in the presence of large objects.
Renesas offer automotive end-to-end solutions from secure cloud connectivity and sensing to autonomous control. Renesas autonomy Platform is an open platform for ADAS and automated driving, supported by Renesas’ sustainable and scalable SoC and MCU roadmaps. The RH850/V1R-M MCU was specifically designed for use in radr applications.
The Analog Devices Drive360 28nm CMOS RADAR technology platform builds on the company’s established ADAS, MEMS and radar technology portfolio widely used throughout the automotive industry for the past 20 years.
ADI’s high-performance radar solution enables earlier detection of smaller and faster moving objects. High-output power enables greater range and identification of smaller objects, while low phase noise enables unambiguous detection of smaller objects in the presence of large objects. See Analog Devices’ Drive360 video here.
The new Renesas autonomy platform is an open, innovative and trusted platform for ADAS and automated driving, supported by Renesas’ sustainable and scalable SoC and MCU roadmaps, the company said.
The RH850/V1R-M MCU was specifically designed for use in RADAR applications as part of the sustainable and scalable portfolio. The new MCU includes optimized programmable digital signal processing, dual CPU cores each operating at 320 megahertz with high-speed flash of 2 MB and 2 MB internal RAM, while meeting industry temperature requirements.
All-in-one time-and-frequency master time and clock server
Spectracom’s VelaSync time server and grandmaster clock.
When the VelaSync time server platform was introduced in 2014, it met the needs of financial trading networks’ move to 10 gigabit-per-second networking. Now available with 40-GbE network interfaces, it offers high-performance synchronization for time-sensitive networks. Matching network speeds between timing and data on a single low-latency high-throughput network enhances synchronization accuracy and eliminates queuing delays and hidden time errors caused by slower connections. The availability of a network timing appliance with 40-GbE interfaces benefits any deployment of critical network infrastructure at high data rates.
The TW3970 / TW3965 antennas have superior cross polarization rejection to enhance multi path signal rejection, tight phase center variation and an excellent axial ratio. The TW3970 is a pole mount or through-hole mount antenna; the TW3965 is an embeddable form. Bothemploy Tallysman’s Accutenna technology and are capable of receiving GPS L1/L2/L5, GLONASS G1/G2/G5, BeiDou B1/B2, Galileo E1/E5a+b plus L-band correction services (1164 MHz to 1254 MHz + 1525MHz to 1606 MHz). The antennas are designed for precision agriculture, autonomous vehicles and other precision applications. The ability of the antennas to access L-band correction services extends its utility to a wider range of applications.
The Tactical Series of inertial navigation systems (INS) is a next-generation family for high performance. Built on a common tactical-grade proprietary micro-electro-mechanical (MEMS) inertial sensing core, the Tactical Series includes the VN-110 inertial measurement unit and attitude heading reference system (IMU/AHRS), the VN-210 GPS-aided INS (GPS/INS), and the VN-310 dual-antenna GPS/INS. The Tactical Series offers the same functionality and features as the Industrial Series for integrators of SWaP-C (size, weight, power and cost) constrained manned and unmanned systems. The Tactical Series takes advantage of the latest developments in solid-state MEMS technology to incorporate a three-axis gyro with <1°/hour in-run bias stability, leading to an attitude accuracy of 1 to 2 milliradian. In addition to the improved IMU core, the Tactical Series enclosure is designed to DO-160G airborne standards and rated IP68 for deployment in harsh and extreme environments.
Plug n’ fly control system for UAV, UAS, USV and UGV systems
Veronte Autopilot is a miniaturized fail-safe avionics system with an embedded suite of sensors and processors for advanced control of unmanned systems. The OEM version weighs 90 grams, and the version with an aluminum enclosure weighs 200 grams. Both versions include a datalink radio. The control system is fully configurable — payload, platform layout, control phases, control channels and the user interface layout can be user defined, making it cost effective for a wide range of professional applications. The embedded GPS module offers RTK-like positioning with centimeter precision. It meets DO-178C / ED-12, DO-254 and DO-160G aircract regulations.
Critical coverage for autonomous driving development
TomTom’s HD (high-definition) Map and RoadDNA are highly accurate digital map products helping automated vehicles precisely locate themselves on the road and plan maneuvers, even when traveling at high speeds. These technologies are being rolled out in strategic geographies and are the subject of key partnerships with other automotive suppliers. TomTom now offers more than 122,000 kilometers of HD Map coverage globally, including Interstates in Connecticut, Delaware, District of Columbia, Georgia, Idaho, Kansas, Louisiana, New Hampshire, New Mexico, North Carolina, Ohio, Pennsylvania, Rhode Island, South Dakota, Tennessee, Texas, and Vermont; Interstates and highways in California, Michigan and Nevada; and the Autobahn network in Germany.
Applications range from infrastructure to infotainment
Smart Antennas by Laird Technologies combine antenna elements and radio receivers in the same robust package. Compared to traditional architectures, the Smart Antenna provides signifcant performance improvement and system-wide cost savings. Custom solutions are available, including 4G LTE cellular, GNSS, Wi-Fi and Bluetooth, as well as the emerging dedicated short-range communications (DSRC) technology with a 1,000-meter range for V2X. Applications include navigation systems, vehicle-to-vehicle communication,vehicle to infrastructure communication and infotainment. Operating temperature range is –40 C to 85° C.
The CEESCOPE-USV is a waterproof one-box echo sounder, GNSS and broadband radio telemetry package that can be installed on practically any remotely operated unmanned surface vehicle (USV). The self-contained unit requires no interface with the USV, eliminating challenges of instrument data integration on the vehicle. Using real-time broadband radio telemetry, detailed 20-Hz dual-frequency soundings, up to 20-Hz RTK GNSS and a 3200-sample-per-ping digital echogram are available to the USV operator on shore via the CEE-LINK radio base station. Data from the CEESCOPE-USV telemetry link allows the operator to steer the USV along the survey line like in any manned boat survey. The CEESCOPE-USV offers users a range to their vehicle of more than 1,000 meters.
The new ALS80-UP airborne sensor enables even more flexible data acquisition with extended range measurement capability. It takes advantage of the dual-output optical system pioneered in the ALS70 and enhanced in the originl ALS80. The AL80-UP has higher Multiple Pulse in Air (MPiA) operation settings, enabling data collection in extreme terrains with minimal variation in swath width due to terrain elevation variations. The ALS80-UP works perfectly in a wide variety of scenarios, including wide-area mapping, detail mapping from high-flying heights and detail mapping over mountainous terrain. With its expanded maximum range, the system has demonstrated good results at up to 6,000 meters above terrain and with terrain relief of up to 2,300 meters.
The Settop Repeater allows rover-RTK network users in areas of low or no GSM coverage to receive differential corrections via radio. It can connect to any external radio model on the market for precision agriculture systems or machine control. Repeater field application versatility is managed by an intuitive software controlled using a touchscreen. It can also be used for land surveying and marine work. It reduces the need for an RTK base station and offers flexible field configuration.
Expanded toolsets and capabilities for speed and accuracy
FieldGenius 8 software takes advantage of the high-power processors, high-definition displays and larger memory in modern Windows Mobile powered data collectors and Windows 7 powered tablets. It provides tight control through expanded toolsets. Features include easy GNSS local transformation with the ability to export and import localization files; enhanced DXF support; advanced point averaging, which allows users to take multiple GNSS measurements and calculate an averaged position; support for integrated inertial sensors; native unicode support;and simplified GIS mapping. FieldGenius 8 also has improved road alignments, an onboard basic measurement mode, dynamic screen rotation and expanded ASCII export options. Supported coordinate systems, geoids, instruments and data collectors have been expanded, making it easier to integrate into existing survey operations.
The FLIR Vue Pro R adds radiometric functionality to the Vue Pro camera, giving drone operators the ability to save pictures for post-flight image analysis and accurately measure the temperatures of individual image pixels. Calibrated radiometric imaging allows it to capture the temperature data of every pixel in an image. When saved in Radiometric JPEG format, still images can be imported into FLIR Tools software for detailed analysis and reporting. FLIR Tools, a free download on FLIR.com, lets drone operators adjust settings including object emissivity, background temperature, target distance, relative humidity and thermal sensitivity, as well as assigning various color palettes for each image. The Vue Pro R records digital thermal video, along with radiometric thermal still images, to an on-board micro-SD card. For applications such as electrical inspection, infrastructure assessment and precision mapping, the onboard recording allows operators to capture high-quality thermal data for post processing and analysis.
Reconnaissance for disaster relief, time sensitive situations
The Digital Mapping Reconnaissance Toolkit (DMRT) creates up-to-date orthomosaic maps and 3D models. Users can fly a drone to survey the landscape for real-time solutions, and geotag reference points in impacted areas without a time lag. Seeing what the drone sees, pilots can create search patterns and map with situational awareness. Modular aerial and land-based solutions are available.