Creating detailed street maps and keeping them updated is an expensive and time-consuming task performed mostly by large companies. They ignore the many parts of the world where this task is not profitable, even though the need is high due to rapid growth and change in the street network, such as in Thailand.
To automate the process and make accurate digital maps available in any country, researchers at the Massachusetts Institute of Technology (MIT) and the Qatar Computing Research Institute have developed an artificial intelligence (AI) model called RoadTagger. It uses satellite imagery to tag road features in digital maps, such as lane counts, which are essential for reliable navigation.
Satellite imagery companies are constantly expanding their coverage and increasing their refresh rate, so this source of mapping data is more readily available and up to date than the data collected on the ground, such as by Google’s fleet of mapping cars. However, satellite imagery often suffers from occlusion from trees, buildings, overpasses and other obstacles.
RoadTagger gets around this problem by using a combination of neural network architectures to predict hidden features. Testing of the model with digital maps of 20 U.S. cities showed that it predicted the number of lanes with 77% accuracy and the road type with 93% accuracy.
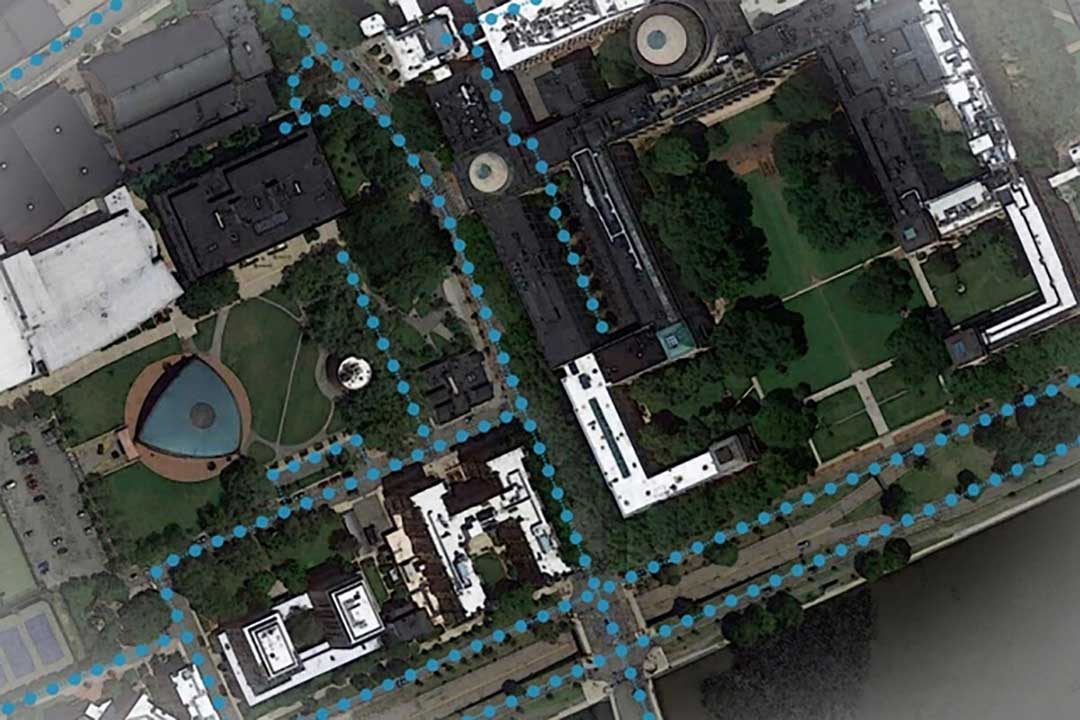
RoadTagger, which combines a convolutional neural network (CNN) and a graph neural network (GNN) is fed only raw data and automatically produces output, without human intervention. The CNN, commonly used for image-processing tasks, takes as input raw satellite images of target roads. The GNN — widely used to model relationships between connected nodes in a graph — breaks the road into roughly 20-meter “tiles,” each of which is a separate graph node.
For each node, the CNN extracts road features and shares that information with its immediate neighbors, thereby propagating road information along the whole graph. For example, if only two lanes of a four-lane road are visible in an image, the model uses information from nearby tiles, such as road width, to conclude that the road has four lanes.
The researchers trained and tested RoadTagger using the OpenStreetMap data set. First, they collected confirmed road attributes from 688 square kilometers of maps of 20 U.S. cities, then they gathered the corresponding satellite images from a Google Maps dataset. The training taught the model what weight to assign to various features and node connections, and it now automatically learns which image features are useful and how to propagate those features along the graph.
The researchers hope that RoadTagger will help humans validate the constant stream of changes in OpenStreetMap and similar datasets as well as enrich them with details that they do not already contain, such as whether a road is paved.
Citation. He, S., Bastani, F., Jagwani, S., Park, E., Abbar, S., Alizadeh, M., Balakrishnan, H., Chawla, S., Madden, S., & Sadeghi, M. A. (Dec. 28, 2019). “RoadTagger: Robust Road Attribute Inference with Graph Neural Networks.” arXiv:1912.12408v1.