A few months ago, many of you may remember that I wrote about an encounter with a rather well-known female journalist who, after listening to one of my GPS presentations, said something like this, “I came here today to learn more about GPS and so far all you have talked about is atomic reference systems…what the heck do those *&@# atomic clocks have to do with GPS…?”
I mentioned at the time how incredulous I was at the question, but that I answered it with a straight face. Now, while professional courtesy prevents me from ever revealing the name of the female journalist, I will say that she evidently started an uncomfortable trend. Much of my correspondence lately has concerned the connections between time and position and/or navigation and why we are so concerned about time.
I won’t bore my more sophisticated readers with GPS 101, or certainly not Time and Frequency Metrology 101, but I will tell you that I think we (this is not the royal “we” but includes all of us who work with and promote GPS on a daily basis) need to do a better job describing just how GPS works and more importantly how critical precise time and frequency is to position and navigation solutions, whether GPS is utilized or not. And I don’t have the time here to take up the argument concerning how important GPS is to our critical national infrastructure. Indeed, a topic and column for another time.
I am sure my time and frequency metrology friends and colleagues at NIST (National Institute of Standards and Technology in Boulder, Colorado) and USNO (U.S. Naval Observatory — read as UTC — home of Coordinated Universal Time and the Master Clock) would probably go about this differently. They tend to approach these problems strictly from a metrology viewpoint. While there is nothing wrong with that perspective, I hope to give you a more hands-on operational view of time and how it relates to position and navigation.
Smithsonian Institution and Time Exhibit
Of course, I could take the easy way out and advise all my readers to visit the latest Smithsonian time exhibit entitled: Time and Navigation – The Untold Story of Getting From Here to There. The new exhibit opens in April.
Here are a few quick Smithsonian facts, with commentary added, for those who want to visit and learn just what time has to do with GPS and navigation in general:
What: The Relationship Between Time and Navigation
When: Opens in April 2013.
Where: The Smithsonian’s National Air and Space Museum, Independence Avenue at Sixth Street, S.W., Washington, D.C.
Responsibility: “Time and Navigation — The Untold Story of Getting From Here to There” is being produced jointly by the Smithsonian’s National Air and Space Museum and the National Museum of American History. This is one of the few times, if not the first, that two museums have jointly produced a major exhibit of this importance.
Sponsors: The exhibition is made possible through the generous contributions of Northrop Grumman; Exelis Inc.; Honeywell; National Geospatial-Intelligence Agency; U.S. Department of Transportation; Magellan; National Coordination Office for Space-Based Positioning, Navigation and Timing; Rockwell Collins; and ION the Institute of Navigation. Note: The sponsors are listed in order of the amount they gave to present the exhibition, but it should be noted that ION was among the first contributors, making the museums’ decision to go ahead with the exhibit a more comfortable one. More on that and why it is significant later.
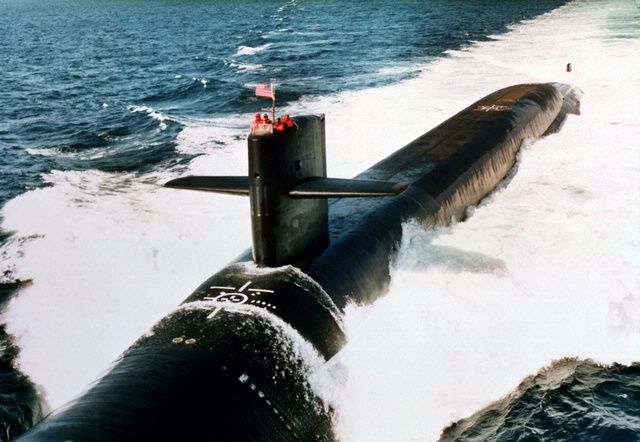
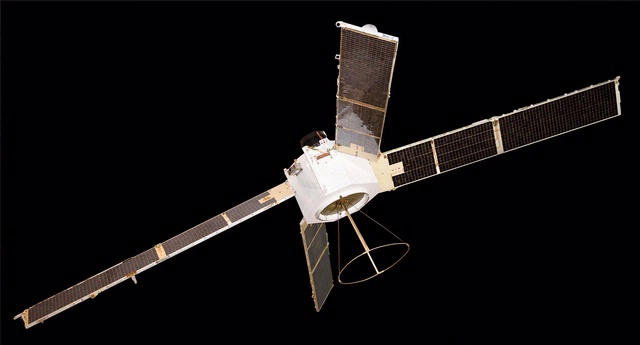
Artifacts: (Don’t you just love the word artifact? Indeed, someone once told me, and not unkindly, that I resemble that word.) The time exhibition features 144 artifacts, drawn primarily from the collections of the participating museums. Highlights of the exhibition include a representation of a 19th-century ship from the U.S. Exploring Expedition; the first sea-going marine chronometer made in the United States; the submarine navigation system for the USS Alabama; a TRANSIT navigation satellite (a major naval predecessor to GPS); Wiley Post’s airplane, the Winnie Mae; and Stanley, originally from the Stanford University Racing Team and written about many times by yours truly in GPS World. Stanley is a robotic vehicle that can drive itself. Stanley is a 2005 Volkswagen Touareg, which has been considerably modified to navigate without remote control and without a human driver onboard. Stanley handily won the 2005 DARPA Grand Challenge (Defense Advanced Research Projects Agency), a robotic vehicle race. Stanley successfully navigated 212 kilometers (132 miles) across desert terrain and has had his (here we go, anthropomorphizing automobiles) own robotic exhibit at the Smithsonian since 2009.

Organization: The current time exhibition is organized into five sections: Navigation for Everyone; Navigating at Sea; Navigating in the Air; Navigating in Space; and Inventing Satellite Navigation.
Theme: If you want to know where you are, you need an accurate clock. In other words, you need to know when you are. About 250 years ago, sailors first used accurate clocks, later known as chronometers, to navigate the oceans. Today, we locate ourselves on the globe with synchronized atomic clocks in orbiting satellites (GPS is the primary method today). Among the many challenges facing navigation from then to now, one stands out: keeping accurate time.
For centuries, nations have invested enormous resources to determine time and place for geopolitical reasons, and their research has changed people’s view of the world. Advanced technology that was once available only to the military has become commonplace and downloadable to cell phones, iPADS and computers. Instead of unfolding a map or stopping at a gas station to ask for directions, drivers can now consult their car’s GPS (Global Positioning) system. The new gallery examines the cultural and technological history of precise timekeeping and navigation at sea, in the air, and in space and the impact of satellite navigation on our everyday lives. Which of course are also the missions of the Institute of Navigation and GPS World magazine.
When Am I?
Many of you have heard the old saw about those who don’t know history being doomed to repeat it, and if you don’t know where you have been, how can you know where you are? There are probably numerous maxims that fit the bill when it comes to the history of time and navigation, and the Smithsonian Exhibit certainly does a great job of hitting all the high points, but beyond that, they will take you into about as much detail as you can stand. If possible, plan on attending the exhibit several times and delving into each of the five major themes. But if you can’t visit Washington, D.C., and the Smithsonian exhibit, then visit virtually on their excellent website.
For our purposes, suffice it to say that you can’t really know where you are unless you know when you are. That requires a clock, the more precise the better, and consequently the more accurate your position.
History Lesson
More than 200 years ago, sailors sailing between Europe and the New World knew where they were only in relationship to their latitude, but had no idea other than dead reckoning of their longitude.
Enter Boston clockmaker William Cranch Bond who, although he was not the first, constructed a specialized timepiece, which later became known as the Bond Chronometer, which sailors used to determine longitude at sea. But still there were problems. Sailors used a maritime sextant and chronometer to determine position, but both devices depended on the other. On cloudy or foggy days, either the horizon or the sun and stars or both were unavailable, and positioning/navigation was relegated to, in all seriousness, dead reckoning with a dubious magnetic compass, a rock and a rope. The problem being, of course, that dead reckoning made many mariners resemble the first word in that very unfortunate navigational phrase.
Time and Air Navigation
Fast forward almost a century (1903), and aeroplanes are now on the scene along with all the problems attendant in navigating a machine easily traveling ten times faster than most ships. But of course the U.S. Navy rationalized that if a watch and a sextant were good enough for navigating maritime ships, then they were good enough for ships of the air — even if the horizon was often obscured or moved around a great deal, or turbulence made balancing a sextant difficult.
The result was most aviators gave up on the sextant, especially solo aviators, and just used a watch and, you guessed it, dead reckoning, which is exactly what happened to many aviators in 1927 who attempted to win the Raymond Orteig $25,000 prize for being the first solo aviator to cross the Atlantic nonstop from the East Coast of the U.S. — in fact, it had to be New York to Paris, France. For you trivia buffs, it had to be New York to Paris because the person offering the prize, Monsieur Raymond Ortieg, was an emigrant from France who did well for himself and went from a penniless restaurant busboy to owning two of the most prestigious hotels in New York City at the time. Hence the connection between New York and Paris. But I digress.

Enter Lindbergh
As most of you are aware, then captain, later colonel, Charles Lindbergh took up that dare and won the Orteig-prize on the 21 of May, 1927, when he landed in Paris after a grueling 33½-hour solo flight across the Atlantic. When Lindbergh hit land after being “feet wet” for more than 30 hours and 3500+ miles, he was less than three miles from his intended European entry point, a feat that would be hard to duplicate today without GPS, as even with an unaided inertial system the drift can sometimes be as high as one kilometer per hour.
One part I always find amusing about the Lindbergh transatlantic saga is that after flying with “dead reckoning” as his only means of navigation for 30 hours across the Atlantic, he followed the Seine river all the way to Paris, so he essentially converted from VFR (Visual Flight Rules) to the IFR or “I fly rivers” navigation method for the last part of his journey.
Meteorologists and the sealed barometric equipment Lindbergh carried on board — to prove he never landed enroute or that it was indeed a non-stop flight — would not only verify that fact but also verify that he navigated the Atlantic in what we might call today The Perfect Calm. Indeed, Lucky Lindy picked the perfect 48-hour period for his flight. For those of you who read the book, saw the movie, or were there, will remember that in New York the weather during the night preceding his historic takeoff from the dirt-churned-into-mud runway at Roosevelt Field, Long Island, New York, was less than cooperative. There was a major thunderstorm with lots of lightning and several inches of rain; consequently, many counseled Captain Lindbergh to postpone his flight. But he would have none of it and the rest is history.
The most interesting part of the story, however, is that the entire flight was accomplished with “dead reckoning,” a compass and a watch, the very same tools that Captain Lindbergh used during his tenure as a U.S. Mail pilot. So, in fact, Lucky Lindy actually knew very little about navigating an airplane or avigation, as many called it at the time. Indeed, according to Roger Connor from the National Air and Space Museum and his wonderful article in this month’s Smithsonian Air & Space magazine, Even Lindbergh Got Lost, Captain Lindbergh did not learn to properly navigate with a sextant, chronometer and star charts until more than a year after his famous flight to Paris.
I won’t spoil the story for you, but he learned to navigate as did his famous wife, Ann Morrow Lindbergh, from then Lieutenant Commander Philip V.H. Weems of the U.S. Navy. LCDR Weems set up the nation’s first independent navigation school, and went on to instruct such notables as General Curtis LeMay, the Commander of Strategic Air Command (SAC), who went on to serve as the Chief of Staff of the USAF. Most people are not aware, but General LeMay was dual-qualified as a pilot and a navigator in the USAF. As the Commander in Chief of SAC or CINCSAC, he mandated that all SAC flight crews be able to navigate from Point A to Point B using only passive means that were always available and did not involve transmitting a signal outside the aircraft. In other words, celestial navigation, using a sextant, chronometer, special plotter and star charts, much as was taught by LCDR Weems.
I was one of the lucky SAC flight crew members who learned to navigate with those basic instruments. And checking my logbooks, I find that I made just short of 200 flights (99 round-trips) across the big pond, the Pacific that is, using those basic instruments. I mentioned this to a group of USAF aircrews recently during a speech, and when I asked how many of them could accomplish that feat if required to do so today, I was informed that sextants are no longer carried on USAF aircraft and most do not even have sextant ports. In other words, it is a lost art among flight crews today, and it is a shame, but it is also a topic for another time.
The important fact concerning navigation and time is that time — indeed, precise time — is and always has been critical to accurate navigation, especially aircraft navigation, no matter whether you are flying from New York to Paris, Texas, or New York to Paris, France. And GPS Atomic Reference Systems (Atomic Clocks) on orbit today, which deliver time accurate to millionths of a second, are even more critical since they are the heart of the system. So I would say to my journalist enquirer, GPS and atomic clocks are one and the same. You can’t navigate accurately without precise time.
Weems Legacy
Now, to bring this full circle, I first heard about the proposed Smithsonian Time Exhibit about two years ago from a friend and professional colleague, James Doherty, Captain, USCG retired. Jim, who once served as the Commander of the United States Coast Guard Navigation Center, is a past President of ION (Institute of Navigation), one of the few U.S. members of the Royal Institute of Navigation (RIN) in London, England, and now serves as the Chairman of the newly created Military Division at ION. And for full disclosure purposes, I must say that I have been a proud member of ION for more than 30 years.
Jim, who was serving on a Smithsonian panel as a subject-matter expert on navigation, told me that the Smithsonian had the idea for the time exhibit, but was looking for support, and the first organization to pledge support was indeed ION. The Institute of Navigation certainly does not have the deep pockets of Northrop and Exelis or the other major sponsors, but they are very serious about navigation and they are always looking for ways to promote their vision. This was the perfect opportunity.
And just in case you were wondering, the legacy that Captain, U.S. Navy, V.H. Weems left the world is a method of celestial navigation that persisted as the primary means, especially in the U.S. military and military forces around the world, for more than 60 years and is still the only reliable means of navigation available to us when everything else goes away. For with the Weems Method, as long as you have a sextant and an accurate clock, you can navigate anywhere.
Oh, and one other legacy: Captain V.H. Weems was the founder of the Institute of Navigation, which is the leading society devoted to the advancement of navigation in the world today. And for you trivia fans, the ION predates the RIN by two years.
Sequestration and Cancellations
Normally I would wrap it up here and say grab your sextant and happy navigating, but just as I wrap this up I have been told by informed sources at SMC and AFCEA that the GPS Partnership Council scheduled for May this year has been postponed. Sources at ION tell me that ION/JNC in Orlando has been cancelled for this year due to the restrictions on travel for U.S. government and military officials. In other words, more victims of sequestration and a Congress that can’t make the decisions we elect and pay them to make.
At ION they have always had the mantra, do it right or don’t bother doing it at all, and this year the travel restrictions are just too great. Certainly Jim Doherty and I were in the process of setting up another great Warrior Panel for the classified day, but that will have to wait for another time. However, I am assured by ION Executive Director Lisa Beaty that the ION GNSS meeting from September 16-20 at the Nashville Convention Center is definitely a go, so I look forward to seeing everyone there. Stop by the GPS World booth and say hello. Plus, I hope to see many of you at the 29th Annual National Space Symposium in Colorado Springs from April 8-11, 2013.
Until then, Happy Navigating – blow the dust off your sextant and give it a shot.










 Since that time the U.S. Coast Guard spent more money dismantling the legacy LORAN-C infrastructure and antennas than it would have taken to complete the 20% upgrade for a full transition to eLORAN. Taking down the Port Clarence, Alaska, tower, the video of which was a YouTube favorite for many weeks, cost an estimated $8 million. The destruction of the towers in Attu (right), Shoal Cove and St. Paul were probably on average $5 million each. With the tower removal in Baudette, Minnesota, the cost of removing Loran towers to date cost close to $25 million. One could argue that the administration created some jobs in these “shovel-ready” tower tear downs, but I have no doubt that a better use of the funding would have been to deliver a robust positioning, navigation, and timing backup for the nation. But alas that is ancient history in the technology world, a whole 18 months to be exact.
Since that time the U.S. Coast Guard spent more money dismantling the legacy LORAN-C infrastructure and antennas than it would have taken to complete the 20% upgrade for a full transition to eLORAN. Taking down the Port Clarence, Alaska, tower, the video of which was a YouTube favorite for many weeks, cost an estimated $8 million. The destruction of the towers in Attu (right), Shoal Cove and St. Paul were probably on average $5 million each. With the tower removal in Baudette, Minnesota, the cost of removing Loran towers to date cost close to $25 million. One could argue that the administration created some jobs in these “shovel-ready” tower tear downs, but I have no doubt that a better use of the funding would have been to deliver a robust positioning, navigation, and timing backup for the nation. But alas that is ancient history in the technology world, a whole 18 months to be exact. In February 2012 the U.S. Coast Guard Research & Development Center (R&DCEN) announced it had entered into a Cooperative Research and Development Agreement (CRADA) with UrsaNav to research, evaluate, and document at least one alternative to the Global Positioning System (GPS) as a means of providing precise time. The alternative under consideration is a wireless technical approach for providing precise time using U.S. government facilities and frequency authorizations.
In February 2012 the U.S. Coast Guard Research & Development Center (R&DCEN) announced it had entered into a Cooperative Research and Development Agreement (CRADA) with UrsaNav to research, evaluate, and document at least one alternative to the Global Positioning System (GPS) as a means of providing precise time. The alternative under consideration is a wireless technical approach for providing precise time using U.S. government facilities and frequency authorizations.