Oscilloquartz, an ADVA Optical Networking company, has launched its OSA 5401 Syncplug, an accurate and efficient small-form-factor pluggable grandmaster clock and GNSS receiver.
The device has a small footprint and compact design. It complements the existing portfolio of Oscilloquartz products, driving precise IEEE 1588v2 Precision Time Protocol (PTP) frequency and phase synchronization as well as Synchronous Ethernet deeper into access networks, including radio access and small cell networks.
With its miniature form factor and low-touch provisioning, the new synchronization solution can be deployed in space-restrictive environments. It operates at low cost, consumes minimal energy and requires no additional power source or real estate, Oscilloquartz said.
The OSA 5401 Syncplug supports the creation of a new time distribution architecture to meet the stringent phase-synchronization requirements of today’s access networks, the company said.
“In terms of efficiency, precision and density of design, our OSA 5401 Syncplug miniature grandmaster is a major development for our industry,” said Kenneth Hann, senior director, R&D, Oscilloquartz. “It’s possibly the world’s smallest grandmaster clock and yet it generates phenomenally precise PTP frequency and phase synchronization for radio access and small cell networks. Now network operators have a cost-effective migration path for deploying robust phase and frequency synchronization deeper into access networks. Our OSA 5401 Syncplug integrates with existing network elements and its small form factor and rich feature set enable a versatile range of deployment options for enhanced synchronization network performance. Its timing-optimized, dual-frequency GNSS receiver achieves excellent performance even in urban canyons where small-cell deployments are often made and it can also work with a single satellite.”
The OSA 5401 Syncplug is the first new product to be jointly engineered by Oscilloquartz and members of the recently acquired Time4 Systems. It easily conforms to all relevant PTP telecom profiles and, when locked to global navigation systems, meets the stringent requirements of G.8272 and G.811 specifications. The device functions as a Synchronous Ethernet source, GNSS receiver and a grandmaster clock. It can support both Layer 2 and Layer 3 PTP transport and is capable of unicasting and multicasting simultaneously. Advanced design and network redundancy techniques provide resiliency against local GNSS jamming. It also boasts an impressively wide operational temperature range of -40 to 85 Celsius. But the key benefits that the OSA 5401 Syncplug provides are space and energy efficiency for significant savings in installation and engineering costs. It also fully complies with multi-source agreements for total interoperability.
“An enormous amount of expertise and passion has gone into designing this device. It’s been driven by our strategic understanding of what’s most needed in the synchronization space,” said Gil Biran, general manager, Oscilloquartz.
“This first member of our miniature sync product family has already won great feedback from major mobile operators. What makes our ultra-compact OSA 5401 Syncplug so special is that it combines small size with high performance,” Biran said. “Make no mistake, there’s a vast amount of advanced functionality squeezed into this device. That’s what enables it to deliver highly accurate timing distribution with the smallest available footprint. This level of agility and efficiency creates a new range of solutions for service providers to deploy phase synchronization even in the most difficult network scenarios. There’s no doubt that this is an exciting time for network synchronization technology and this new product will extend our position in the market as a one-stop shop for all synchronization solutions. The new generation of mobile networks demands more small cells and a higher density of radio heads and we’re addressing this challenge in the most energy-efficient and cost-effective way possible.”
Watch ADVA Optical Networking’s latest video on assisted partial timing support for more information.
Trimble has introduced a new grandmaster clock to address the synchronization needs of the fast growing next-generation LTE-Advanced and small cell network market. The Thunderbolt PTP Grandmaster Clock (GC), coming in the first quarter of 2016, was introduced at the ITSF 2015 Time and Synchronization in Telecoms Conference, held in Edinburgh, UK, Nov. 2-5.
Trimble said it value-engineered the industry-standard grandmaster clock, focusing on the features required in next-generation networks, including dual gigabit Ethernet ports and a small form-factor pluggable module port for optical connections. Its low price point enables network architects to move the timing source from the core to the edge of the network, enabling higher phase and frequency precision at the Precision Time Protocol (PTP) clients.
“Trimble entered this market to expand on our success in GNSS timing solutions for telecom networks,” said Karen Guldan, general manager of Trimble’s Time & Frequency Division. “The design and development of the GC focused on creating an optimized solution for network providers — at a price point of less than $2,000, it is intended to be a game-changer in small-cell network design. The GC’s features provide superior value to service providers.”
With flexible network interface protocols and easy integration, Trimble optimized the GC to deliver precise frequency and phase synchronization signals for LTE-Advanced and small cell networks supporting IEEE 1588 PTP, Network Time Protocol (NTP) and Synchronous Ethernet simultaneously. The GC supports up to 250 simultaneous PTP clients and 5,000 NTP transactions per second, and is designed for small- and medium-scale deployment.
With a small form factor of half rack 1RU, users may deploy the Trimble GC either indoors or outdoors. In a server room, the Trimble GC deploys in a side-by-side configuration to provide timing redundancy. For outdoor applications, the Trimble GMC also features an extended operating temperature range for use in non-typical networking environments such as a telecom cabinet. The Trimble GC configures for AC and DC power.
The GC was designed to provide continuous availability of traceable time. The GC includes an embedded, multi-GNSS (GPS, GLONASS, BeiDou and Galileo-ready) receiver to generate precise 10MHz and pulse per second outputs. Utilizing the latest in GNSS technology combined with a precision oscillator, the GC provides better than 3 microsecond phase holdover over a 24-hour period.
The Trimble Thunderbolt PTP Grandmaster Clock is expected to be available in the first quarter of 2016.
PCTEL Inc. has launched a new GNSS multi-satellite antenna portfolio for mobile and base-station timing applications. PCTEL’s new SkyLink antenna technology features out-of-band rejection characteristics that provide exceptional GPS/Galileo and GLONASS L1 support and performance in heavy RF traffic environments for fixed and mobile timing and asset tracking applications.
The new portfolio consists of two product lines:
SkyCompass for fleet management and asset tracking applications
SkyStamp base-station antennas for timing and synchronization of 4G LTE cellular networks.
SkyCompass comprises six new configurable antenna platforms, including single-band or multiband GNSS options that address the majority of fleet management installation needs. SkyStamp offers two timing reference and synchronization antenna models that provide maximum mitigation of the effects from nearby LTE interference sources.
“Over the last decade, PCTEL has been the industry’s technology leader in high rejection GPS products. These antennas are deployed worldwide by OEM customers in aviation, defense, and fleet management public safety projects,” said Rishi Bharadwaj, vice president and general manager of PCTEL’s Connected Solutions. “True to our commitment to support global communications and evolving requirements, PCTEL’s SkyLink technology provides global multi-satellite GNSS coverage and precision tracking by rejecting RF noise or interference that can negatively affect communications in performance critical situations.”
SkyCompass and SkyStamp antennas will be available for shipment in November.
EndRun Technologies has launched two GPS-based timing products.
Meridian II Precision TimeBase.
The Meridian II Precision TimeBase references GPS to provide ultra-accurate time (10 nanoseconds to UTC) and frequency. At the core of Meridian II is a new GPS receiver that EndRun optimized to deliver a variety of traditional- and network-based time and frequency signals.
“The second-generation Meridian II continues EndRun’s heritage of pushing the envelope by delivering an industry-best, UTC time accuracy of 10 nanoseconds.” said Ron Holm, marketing manager, EndRun Technologies. “Meridian II also introduces a security-hardened, high-bandwidth network interface to synchronize evolving, network-centric applications via the Network Time Protocol (NTP) and IEEE-1588 Precision Time Protocol (PTP). Frequency standard customers will be happy to know that the revolutionary ultra-low phase noise and short-term stability performance of the original Meridian continues to be provided.”
Tycho II Precision TimeBase.
Also new is the Tycho II Precision TimeBase time and frequency standard, which references GPS to provide exceptional time (25 nanoseconds to UTC) and frequency (<1×10-13 per day) accuracy in a security-hardened, network-centric platform.
At the core of Tycho II is a new EndRun GPS receiver that is optimized to take advantage of improved GPS system accuracy. Tycho II delivers a variety of traditional and network-based time and frequency signals and services via a modular, customer-configurable platform. Operational status is easily monitored via the network interface (HTTPS, SNMP, SSH). Intuitive charts are provided to assess current and historical performance of Tycho II, its GPS receiver and reference oscillator.
“The second-generation Tycho II provides our customers with a cost-effective, high-performance time and frequency standard without compromise to security and reliability,” said Dan Paine, sales and support manager, EndRun Technologies. “In addition, Tycho II uses the same network-centric core of our ultra-high performance Meridian II TimeBase. This enables operation as a high-bandwidth, Network Time Protocol (NTP) server and optional IEEE-1588 Precision Time Protocol (PTP) Grandmaster.”
Both the Meridian II and Tycho II have modular architecture that allows customers to configure them to meet specific application requirements.
The units support mission-critical operations in a wide range of government and commercial applications including telecommunications, satellite communications, digital video broadcast, simulcast radio, test range, test and measurement, calibration labs and power utilities.
Wide-Area Wireless Network Synchronization with LocataNets
The United States Naval Observatory conducted several independent frequency synchronization experiments in Washington, D.C., using an alternative PNT technology in multiple network configurations. The results suggest that sub-nanosecond time transfer using this technology may be possible over wide urban areas, and that it could thus serve as a GPS augmentation or back-up solution over wide areas for critical applications that depend on precise time.
By Edward Powers and Arnold Colina
Because of the great responsibility of being the prime source of time for many critical national systems, the United States Naval Observatory’s (USNO’s) clock system must be at least one step ahead of the demands expected to be made on its accuracy. Therefore, innovative methods of transferring precise time and frequency must continually be anticipated, investigated and supported.
The USNO has developed one of the world’s most accurate and precise atomic clock systems, used by many systems requiring highly precise time. The USNO operates the U.S. Master Clock, which provides the precise time source for the GPS satellite constellation run by the Air Force; it is also the time standard for the U.S. Department of Defense. Along with its sister organization, the National Institute of Standards and Technology (NIST), it provides the official time for the entire nation.
To investigate new precise time transfer methods, the USNO desired to independently test Locata’s TimeLoc methodology as a possible technology for maintaining precise frequency synchronization across an urban or wide-area network — the foundation for supporting precise time transfer.
Internet of Everything Ups Timing Requirements
Many critical modern systems such as 4G mobile phone networks, banking, and electricity grids demand high-accuracy time and frequency stability across specified areas. Precise network synchronization is critical for nearly all digital networks, and more stringent network stability requirements are expected to emerge as the user base for these applications continues to grow. To date, the preferred method to achieve this performance is via synchronization from GPS. However, the vulnerability of GPS signals causes growing concern among industry experts. Many actively seek alternative means of precise time transfer and frequency stability across wide areas.
Alternative position, navigation, and timing (PNT) technologies such as chip scale atomic clocks (CSAC), precision time protocol (PTP), and enhanced long range radio navigation (eLoran) are proposed or operational today, with each serving different markets.
Meanwhile, timing needs for wireless protocols continue to increase with the proliferation of mobile phones and other wireless communication devices. To accommodate a booming user base, wireless spectrum must be carefully managed to improve bandwidth and channel efficiency. Wireless communication performance is fundamentally dependent upon precise time and frequency, so improvements in highly accurate timekeeping methods will permit better spectrum utilization, which in turn permits more users and more bandwidth per user.
Clearly, synchronization is a core enabling technology for modern digital systems, both for radiopositioning and the world’s telecommunications highways. But synchronization is taken for granted because, when it works well, it is effectively invisible. Without it, however, everything is likely to fall apart.
Synchronization will become even more crucial for the next generation of digital systems. A recent paper by the U.S. National Institute of Standards and Technology (NIST) states that we stand at the advent of a revolutionary new economy fueled by a global Internet of Everything (IoE), in which 37 billion new things will be connected to the Internet by 2020.
This NIST paper adds that “One fundamental enabler of this revolution will be the marriage of timing signals and data that breaks through the existing barriers. Timing is critical for future development and improvements.”
Improved wireless synchronization has proved very challenging to realize, as the timer in each network node is derived from an independent oscillator that is affected by long/short term frequency drifts and jitter. Many alternative timekeeping methods present serious limitations in terms of precision or network size.
Encouraged by earlier published results showing that Locata Corporation’s radio-based PNT technology enables network synchronization at the nanosecond level, and suggesting that it could perform comparably across large urban areas, the United States Naval Observatory (USNO) conducted its own synchronization experiments on Locata technology.
Real-World Challenges
The USNO campus is situated about 4 kilometers northwest of the White House in Washington, D.C. The grassy tree-lined campus is, unfortunately, a relatively small area for testing wide-area synchronization capabilities. It became apparent that realistic long-distance tests would necessitate extending the LocataNet outside USNO boundaries. This meant coordinating access to other facilities in theWashington, D.C., area to allow remote housing of LocataLites and their antennas. As many researchers will confirm: when real-world testing requires access to multiple external sites and their disparate administrations, the coordination required to keep everything on track can quickly become the most daunting challenge of the exercise. We needed to find cooperative facilities, preferably with line-of-sight (LOS) to the USNO and its Master Clock in order to establish the best TimeLoc link between facilities. As we also wanted to exercise TimeLoc’s ability to cascade its synchronization through multiple LocataLites, ever more D.C. facilities would need to be involved. Predictably, it transpired that not many facility managers in the Washington district were eager to help the USNO broadcast and receive new and unknown signals in or around their government buildings! And those who were amenable to support the demonstration either lacked a LOS, or were not willing to assist without considerable monetary compensation.
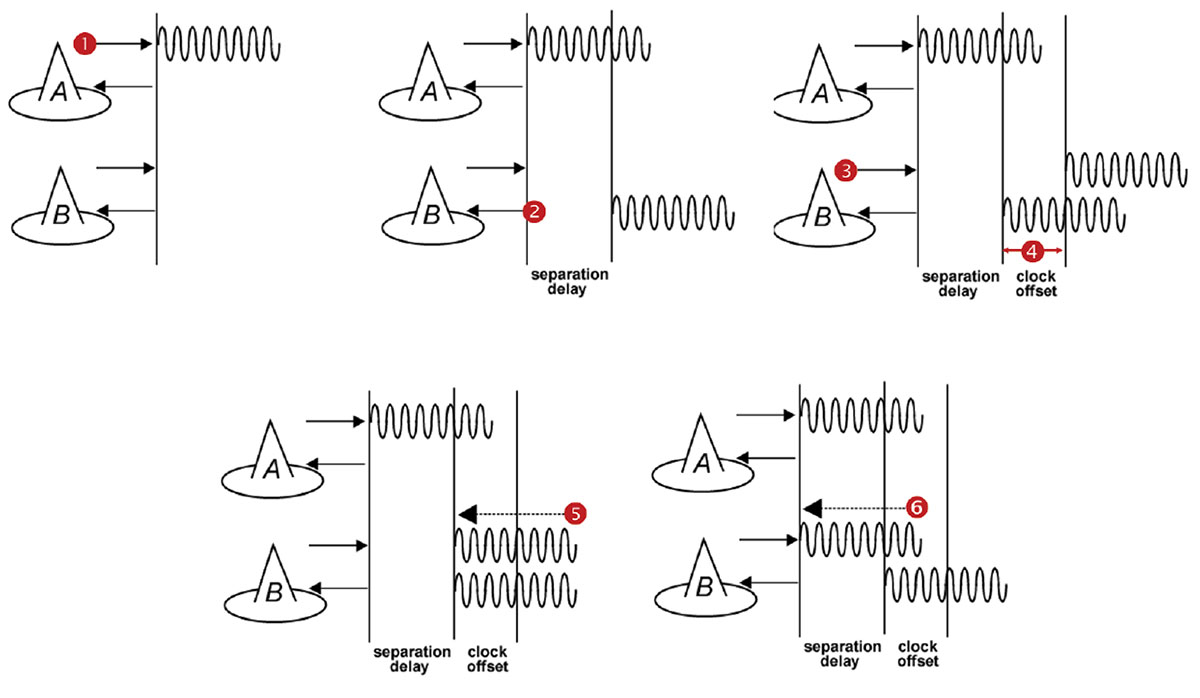
Step 1: LocataLite A transmits a unique signal (code and carrier). Step 2: LocataLite B acquires, tracks and measures the signal generated by A. Step 3: LocataLite B generates its own unique signal (code and carrier) which is transmitted in the normal manner. Importantly, the transmitted signal is received by the receiver section of LocataLite B as well. Step 4: LocataLite B calculates the difference between the signal received from LocataLite A and its own locally generated and received unique signal. Ignoring propagation errors, the differences between the two signals are due to the difference in the clocks between the two devices, and the geometric separation between them. Step 5: LocataLite B adjusts its local oscillator to bring the differences between its own signal and LocataLite A’s received signal to zero. The signal differences are continually monitored and adjusted so that they remain zero. In other words, the local oscillator of B follows precisely that of A. Step 6: The system corrects for the geometrical offset (range) between LocataLite A and B, using the known coordinates of the LocataLites’ antennas. When this step is accomplished, TimeLoc has been achieved.
After months of attempts to secure appropriate partners for this demonstration, we finally found some supporters in the shape of the Federal Aviation Administration Building in Rosslyn, Va., and the National Cathedral in Washington, D.C. Regrettably, it turned out that these facilities were not going to be available at the same time! Logistic challenges never end. This scheduling reality necessitated spreading the TimeLoc demonstration over several months in three different blocks of trials. Nevertheless, we were eventually able to devise a plan which leveraged access to the USNO and still accommodated the timetables of the supporting external facilities.
A series of experiments were planned to measure and evaluate the stability between master and slave LocataLite 1-pulse per second (PPS) signals in several urban LocataNet configurations. Many of the trials were specifically designed to measure TimeLoc’s ability to cascade multiple times through multiple LocataLites, exercising the technology’s capabilities over increasing distances and hence correspondingly larger notional coverage areas.
Figure 2. LocataLites under test at USNO.
Locata signals were broadcast in the Industrial, Scientific and Medical (ISM) 2.4 GHz radio band, commonly known as the Wi-Fi band, with a total radiated power of 200–500 mW. LocataLites and their respective antennas were installed at locations that permitted LOS between units, according to whichever specific LocataNet configuration was being evaluated at the time. In each configuration, the master LocataLite, designated as LocataLite 1, was synchronized to the USNO Master Clock so that the Master Clock’s time would be propagated through the LocataNet. Both the master and slave LocataLite 1PPS signals were collected into a time interval counter and the time difference between their rising edges was measured.
When tracking radio frequency signals over a significant distance, tropospheric delay becomes an important error source for measurements used in timing solutions. The speed of light can only be assumed to be universally constant in a vacuum, so atmospheric temperature, pressure and humidity materially changes the speed of light when propagating through air. In fact, using standard atmospheric parameters, the unmodeled tropospheric delay is surprisingly large — approximately 280 parts per million (ppm), which equates to slowing down almost one nanosecond over each kilometer of radio transmission. Obviously, as transmission distances increase, tropospheric error becomes a substantial factor which must be accounted for in hyper-accurate timing systems. Devising methodologies that effectively mitigate large tropospheric errors becomes essential.
To help solve this problem, Locata developed new tropospheric models that use relatively inexpensive meteorological (MET) stations which measure temperature, pressure and relative humidity at the LocataLite sites. This modeling alone is able to mitigate the tropospheric effects to within just few parts per million. This proved to be an essential feature, as the weather during the course of the entire months-long testing campaign varied significantly among the separate trials.
The TimeLoc Process
LocataNets function as local ground-based replicas of the satellite-based GPS position and timing networks. A LocataNet can be designed and configured by the user to deliver a powerful, local, controllable, tailored signal as required by different applications.
The easiest LocataNet layout to describe is a hub-and-spoke model consisting of a single master LocataLite transceiver and one or more slave LocataLites. More complex network configurations have been deployed in many commercial systems in use today. The patented process by which slaves are synchronized to the master (or other slaves) is known as TimeLoc.
In 2013, a University of New South Wales team demonstrated that Locata’s radio-based TimeLoc technology provided accurate time transfer (~5 ns) and frequency stability (~1 ppb) across a large distance of 73 kilometers (45.4 miles). This significantly outperforms GPS for wireless time transfer. Given this demonstrated radius of transmission in a rudimentary configuration, Locata was shown as being able to supply nanosecond-accurate time to a 146 km diameter circle, which would cover 16,750 km2 — almost 200 times the size of Manhattan. Ranges greater than this can be deployed if required for safety-of-life, military or government-mandated systems.
As TimeLoc is accomplished without the use of atomic clocks, this represents a new level in precision network synchronization of this scale. It could conceivably serve as a GPS augmentation or back-up solution over wide areas for critical applications that depend on precise time.
Since Locata technology was originally developed as a high-accuracy non-GPS-based positioning and navigation solution, the time synchronization accuracy requirements for a LocataLite transceiver are very high. If sub-centimeter positioning precision is desired for a Locata receiver, every smallest fraction of a second is significant; for example, a 1-nanosecond error in time equates to an error of approximately 30 centimeters.
TimeLoc wireless synchronization enables LocataLites to achieve high levels of synchronization without atomic clocks, without external control cables, without differential corrections, and without a master reference receiver.
In theory, there is no limit to the number of LocataLites that can be synchronized together. TimeLoc allows a LocataNet to propagate into difficult environments or over wide areas. For example, if a third LocataLite C can only receive the signals from B (and not A) then it can use these signals from B for time synchronization instead. The only requirement for establishing a LocataNet using TimeLoc is that LocataLites must receive signals from one other LocataLite. This does not have to be the same central or master LocataLite, since this may not be possible in difficult environments with obstructions, or when propagating the LocataNet over wide areas.
This method of cascading TimeLoc through intermediate LocataLites has been proven in a growing number of real-world operational LocataNets, including a network in use today by the U.S. Air Force which is configured to cover up to 2,500 square miles (6,500 square kilometers) of the White Sands Missile Range in New Mexico.
In large networks where extremely high synchronization accuracies are required, it is useful to incorporate a meteorological sensor at each LocataLite to monitor the change in weather over considerable distances. This is certainly the case for long-range systems such as the USAF LocataNet installed at the huge White Sands Missile Range, where distances of over 50 km can be found between LocataLites. However, for the purposes of these USNO Washington experiments, where the longest point-to-point transmission distance was 2.9 km, it was assumed that weather parameters would be virtually identical at all LocataLite locations. Therefore only one MET station was employed within the entire network, which for these trials was collocated with the master LocataLite.
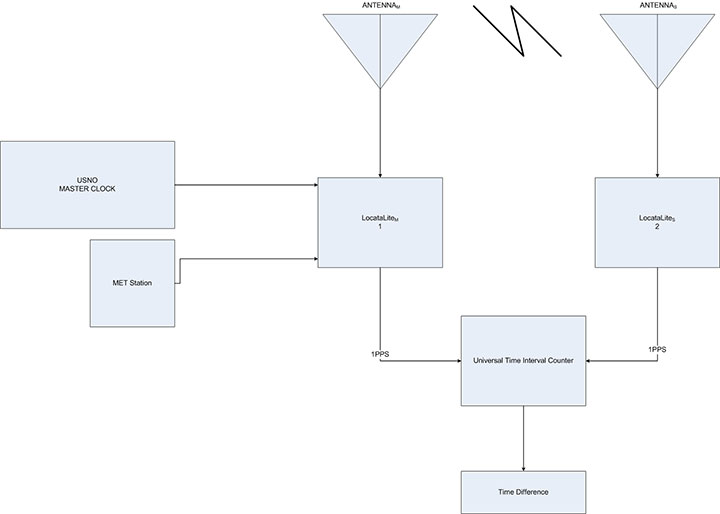
The very first experiment conducted by the USNO to gain some familiarization with TimeLoc was run entirely within the grounds of the USNO campus. It employed two LocataLites with their respective antennas on the roof of USNO Building 78. In this initial configuration the antennas were positioned 15.24 m apart. It was intended to use the measured result as a baseline against which TimeLoc synchronization over longer distance could be compared. This first arrangement is referred to as the two-node setup. A diagram of this configuration is shown in Figure 3.
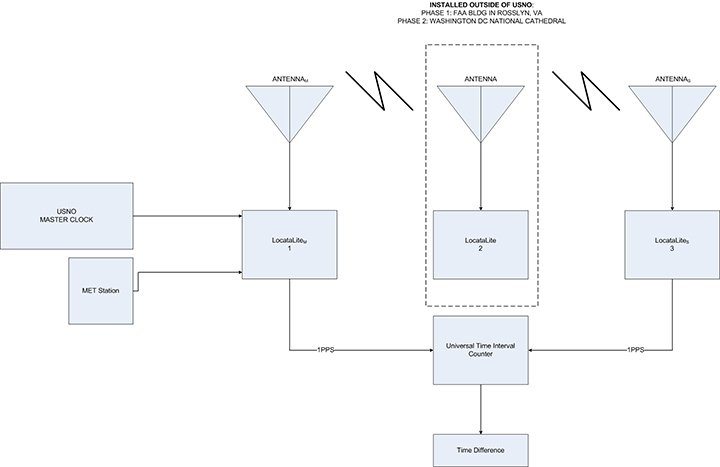
Second and third experiments demonstrated Locata’s ability to cascade the master 1PPS signal to an intermediary slave LocataLite, which in turn transmits a signal to which a third LocataLite can TimeLoc. This LocataNet configuration is referred to as the three-node setup (Figure 4).
Figure 4. Three-node setup (total range: 5.794 km/3.6 mi and 2.401 km/1.49 mi).
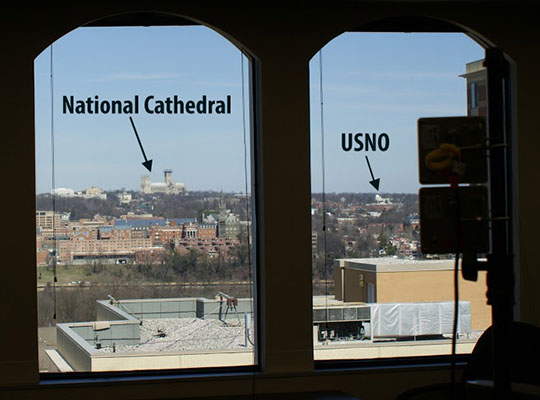
This experiment was conducted twice using two different intermediate LocataLite locations. The first intermediate location was indoors on the top floor of the FAA Building in Rosslyn, Va. (Figure 5). The distance between the master/slave antennas to the intermediate antenna in the FAA building was 2.897 km, but since the signal was propagated through a tinted window, the received signal strength inside the building was greatly attenuated, effectively simulating a much longer transmission distance. The second intermediate (LocataLite 2) location was from the balcony of the National Cathedral’s Ringing Chamber. In this case the distance between USNO LocataLite 1 master/slave to the intermediate antenna in the National Cathedral was approximately 1.183 km.
Figure 5. Intermediate LocataLite 2 antennas inside FAA building. In the distance, both the USNO and the National Cathedral are visible.
In both cases in Figure 4, the distance between master and terminal slave antennas was 3.048 m on the USNO building, but they were intentionally not TimeLoc’d to each other. The timing signal was therefore forced to route through the intermediate LocataLite 2 at either the FAA Building or the National Cathedral.
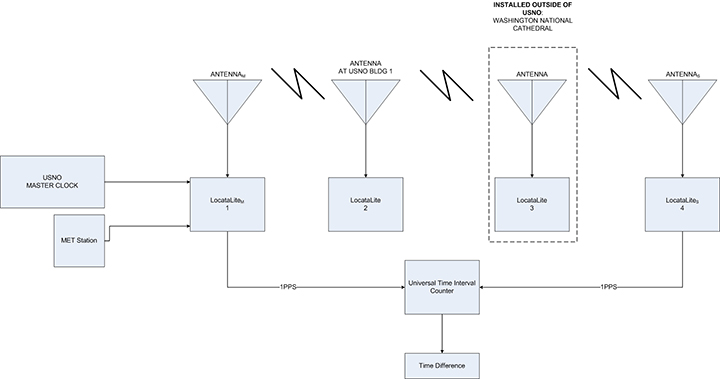
A fourth experiment included yet another intermediate cascade where the TimeLoc signal was transmitted from the second to a third LocataLite/antenna before arriving at the fourth LocataLite in the chain. This LocataNet configuration is referred to as the four-node setup. A diagram of the setup is shown in Figure 6, and it now added a LocataLite on USNO Building 1 to expand the set-up, along with the intermediate LocataLite installed at the National Cathedral (Figure 7).
Figure 6. Four-node setup (total range: 2.413 km/1.5 mi).Figure 7. LocataLite antennas outside the Ringing Chamber of the National Cathedral Spire.
Referring to Figure 6, the distance between the master LocataLite (antenna 1) at USNO Building 78 and the LocataLite (antenna 2) at USNO Building 1 was approximately 42.672 m. The distance between the USNO Building 1 (antenna 2) to the Washington National Cathedral (antenna 3), was approximately 1.144 km. The distance between the Washington National Cathedral (antenna 3) back to antenna 4 on USNO Building 78 was approximately 1.183 km. The total range in this four-node chain was 2.413 km. In this configuration, LocataLites 1 and 4 are intentionally not TimeLoc’d to each other, forcing the 1PPS signal to be routed through LocataLites 2 and 3.
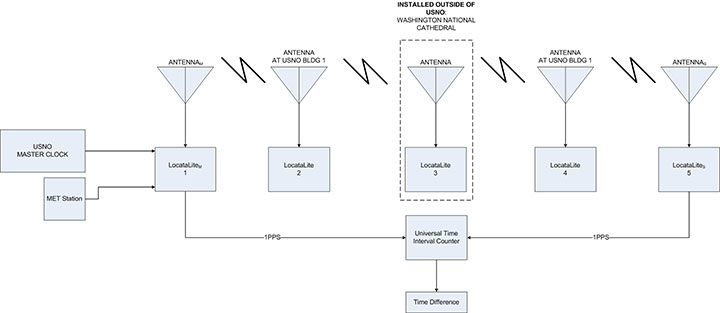
A fifth experiment included yet one more LocataLite and antenna at USNO Building 1 (Figure 9), totaling cascaded TimeLoc among five LocataLites and their respective antennas: the five-node setup, shown in Figure 8. In this configuration LocataLites 1 and 5 are intentionally not TimeLoc’d to each other, forcing the 1PPS signal to be routed through LocataLites 2, 3 and 4.
Figure 8. Five-node setup (total range: 2.427 km/1.51 mi).Figure 9. LocataLite antennas on USNO Building 1. National Cathedral in background.
Measurement Methodology
A measurement of time difference between master and slave LocataLite 1PPS readings was done using a Stanford SR620 universal time interval counter. The rising edge of the 1PPS signals were inspected at 1-Volt trigger level. A 10 MHz reference was provided to the counter from the USNO’s Master Clock. Channels A and B on the counter were designated to the master and slave 1PPS signals respectively. Data were collected from the counter through serial connection to a PC. The length of each experiment was time-limited in some way because of limited access to facilities, such as the FAA building or National Cathedral. However, a minimum of at least 30,000 seconds (8.33 hours) of data were collected for each test to characterize the overall stability of the 1PPS signals between master and terminal slave LocataLites.
Collected Data
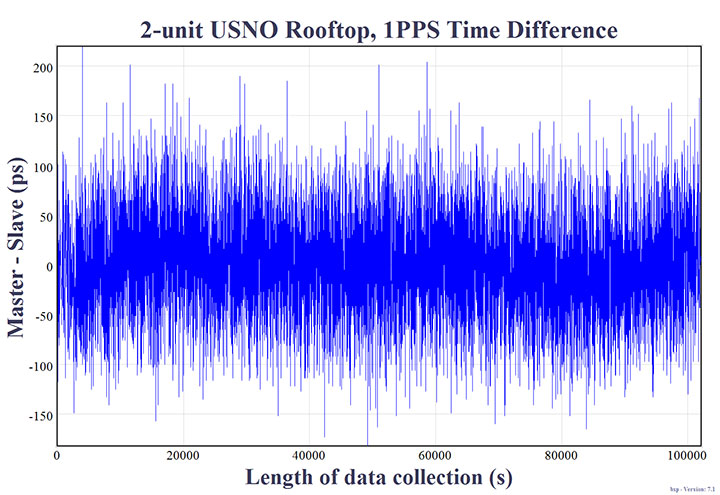
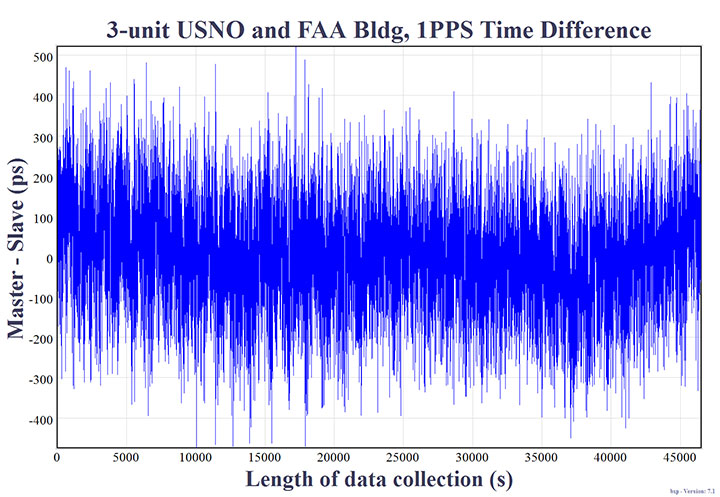
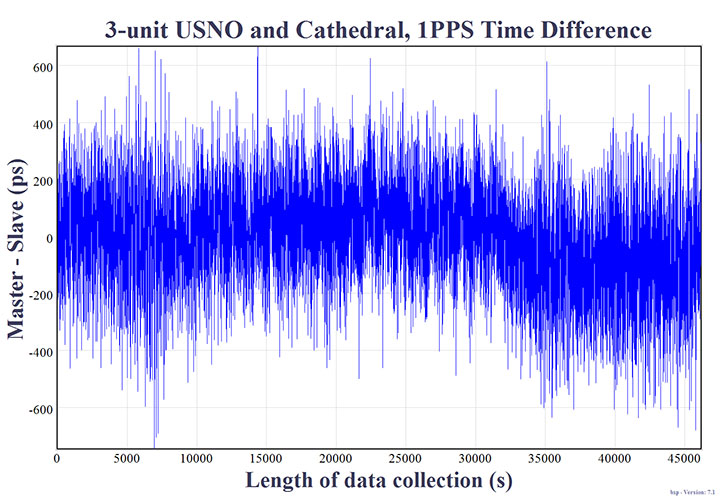
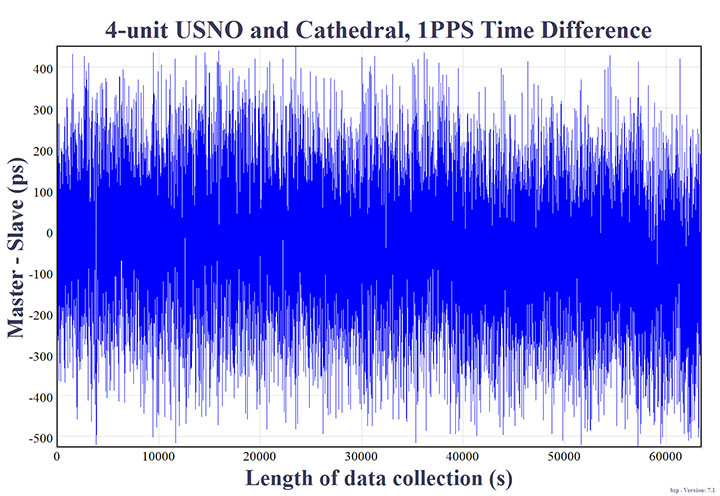
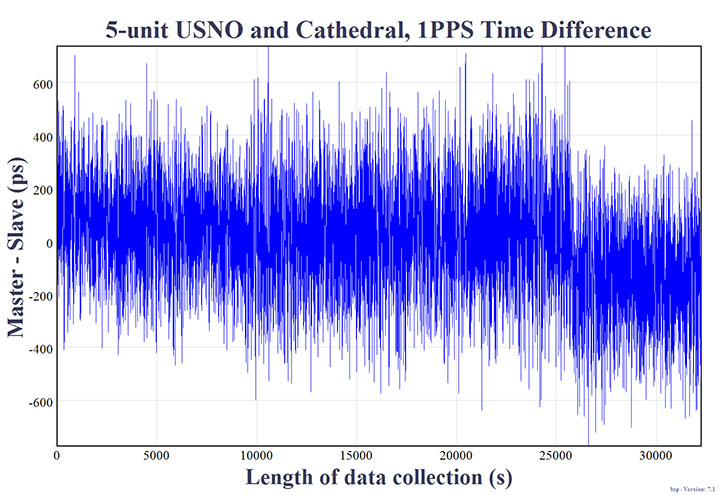
Figures 10 to 14 show the normalized 1PPS time difference between the master LocataLite and the terminal slave LocataLite. Normalization effectively removes errors due to unsurveyed antenna locations and uncorrected cable delays; hence it highlights the frequency coherence of the network.
Figure 10. Two-node setup on USNO rooftop, collected for slightly more than 1 day. Distance: 15.24 m/50 ft. Synchronization Standard Deviation (SSD) = 51.095 picoseconds.Figure 11. Three-node setup at USNO and FAA Building, collected for over 12 hours: 5.794 km/3.6 mi. SSD = 127.333 picoseconds.Figure 12. Three-node setup at USNO National Cathedral, collected for over 12-hours: 2.401 km/1.49 mi. SSD = 171.325 picoseconds.Figure 13. Four-node setup at USNO with cascades at National Cathedral and USNO building 1, collected for over 17-hours: 2.413 km/1.5 mi. SSD = 145.247 picoseconds.Figure 14. Five-node setup with cascades at National Cathedral and 2 hops at USNO building 1, collected for over 8-hours: 2.427 km/1.51 mi. SSD = 197.766 picoseconds.
Results
The results in Table 1 show the 1PPS signal variability for each LocataNet under evaluation. These values represent the frequency coherence between master and terminal slave LocataLite 1PPS signals for each experiment.
Table 1. LocataNet frequency stability.
The two-node setup used two LocataLite antennas located within 15.24m of each other. The measured precision standard deviation was 51.095 picoseconds. This value is a culmination of the total Locata noise budget, which is expected to consist of TimeLoc noise, residual tropospheric error, multipath change (signal scattering/diffusion), PPS generation, and PPS measurement. This two-node result can be used as a baseline for Table 1 measurement results over longer distances. The differences are shown in the last column of Table 1. For example, cascading TimeLoc over the 5.794 km three-node setup introduced an additional deviation of 76.238 picoseconds, compared to the two-node set-up.
The three-node setup tested the effect of adding a TimeLoc cascade wherein the Locata signal from the master is routed to an intermediate LocataLite, and then to the terminal slave. When the master LocataLite signal was cascaded through the intermediate LocataLite at the FAA Building, the configuration showed a standard deviation of 127.333 ps across a total signal path length of 5.794 km. Alternatively, when the master LocataLite signal was cascaded through the intermediate LocataLite at the National Cathedral, that three-node configuration showed a standard deviation of 171.325 ps across a total signal path length of 2.401 km.
Interestingly, it appears that in the two different three-node setups, the intermediate cascade to the FAA building (2.9 km from the master and terminal slave LocataLites) delivered slightly better time transfer performance than the configuration which leveraged the closer (1.183 km) National Cathedral intermediate cascade. We believe this is attributable to the fact that the line-of-sight between USNO Building 78 (the site of the master and terminal slave) and the National Cathedral (the intermediate cascade) was completely obscured by heavy foliage seen in Figure 9, and that this particular configuration required the signal to pass through the foliage twice when being transmitted back and forth. Not only does foliage introduce multipath, but the properties of this foliage also changed regularly according to wind and moisture — two weather attributes that varied significantly over the course of the week in which those particular experiments were set up and run. This theory seems reasonable, since the four-node setup only required the signal to pass through this foliage once, and the recorded performance was better than the three-node setup — despite the fact that an additional TimeLoc cascade point was introduced.
The four-node setup included TimeLoc cascades at USNO Building 1 and the Washington National Cathedral. In this configuration, the data from Table 1 shows a standard deviation of 145.247ps across a total signal path length of 2.413 km.
The five-node setup included yet another TimeLoc cascade between the National Cathedral and Building 1 at USNO before reaching the terminal LocataLite slave. In this configuration, the data from Table 1 shows a standard deviation of 197.766ps across a total signal path length of 2.427 km.
Frequency Stability
Frequency stability is best measured over long periods. Because all of the equipment in the two-node setup was located on USNO premises, it could be run undisturbed for a longer period of time than configurations which required access to external facilities outside of the USNO’s control. Data obtained from the two-node setup were used to calculate the frequency stability between the two TimeLoc’d LocataLites. The length of this data set was 28 hours, 22 minutes, and 40 seconds. During this period, the approximate one-day frequency stability was measured as 1×10-15 (1 part per quadrillion).
To put this measurement into a more practical context: Stratum 1 is defined as a source of frequency with an accuracy of at least 1×10- 11, hence Stratum 1 performance generally originates from an atomic standard. For example, Cesium beam atomic clocks typically provide better performance than this, with one day Allen deviation stabilities in the mid- Ex10-14 (usually stable to between 3×10-14 to 6×10-14). Rubidium clocks are typically never more stable than 1×10-13 and Maser clocks are typically stable to mid-to-low Ex10-15 over one day.
Locata’s link stability — achieved without the use of atomic clocks — is clearly capable of distributing Stratum 1 frequency and precise time without substantially degrading the reference clock stability. This measured performance is significant, because a stable network is an essential prerequisite for precise time and frequency transfer. Moreover, for many traditional timing applications and developing digital and IoE applications, stability is more important than accuracy; just as for most advanced technology applications, frequency is more important than time of day.
Conclusions
The five USNO experiments suggest that the variations of the measured frequency synchronization between master and terminal slave LocataLites were not inevitably attributable to the distance between LocataLites, but rather governed by the number of nodes or cascade points in the LocataNet configuration, and LocataLite signal quality. Each signal cascade through an intermediate LocataLite introduced ~25ps of jitter into the solution.
Additionally, it was noted that transmitting TimeLoc signals across an urban environment did not always allow for unobstructed line-of-sight or completely open-sky environments. For instance, some of the LocataNet configurations required the signal to travel through dense, leafy trees which appeared to slightly affect overall frequency stability. Additionally, one FAA configuration required the signal to travel indoors through a tinted window which ultimately affected received signal strength.
These USNO tests highlighted the capability of the LocataLite as a viable option for a stable 1PPS distribution setup within an urban environment in support of applications like cell tower synchronization in “GPS-challenged” environments. All tested configurations demonstrated frequency synchronization of less than 200 picoseconds. This is significantly better than any other known wireless network synchronization methodology, including GPS. Furthermore, if clear line-of-sight is available between a master and slave LocataLite, the 2-node precision has been shown to be on the order of 50ps, and has one-day stabilities to 1×10-15.
These results, reinforced by those previously reported in University of New South Wales tests over a very large area, suggest that distance between nodes is not a significant factor, provided that sufficient signal quality is maintained. Thus, there are no theoretical or technical problems with scaling LocataNets to very large areas. In fact, this has already been demonstrated at the White Sands Missile Range where the USAF has now deployed a fully-operational Locata network that covers up to 2,500 square miles (6,500 square km), about 80 times the size of Manhattan.
The USNO trials reported here have clearly demonstrated TimeLoc’s relative picosecond-level synchronization of independent Locata networks. If this highly-stable network capability were not in place, precise time transfer would not be possible. The next step is to demonstrate how well a LocataNet can deliver absolute time transfer of the USNO’s Master Clock time to any other network node across similar areas of Washington, D.C.
Acknowledgments
The authors would like to thank James Shepherd of the National Cathedral and Paul Worcester of the FAA for use of their respective buildings. The authors would also like to thank Locata personnel for the use of their equipment and technical assistance in setting up the LocataNets under evaluation.
This article is based on a paper presented at ION GNSS+ 2015.
Disclaimer
Though particular vendor products are mentioned, neither official USNO endorsement nor recommendation of any product is herein implied.
Edward Powers is the GNSS and Network Time Transfer Operations Division Chief at USNO. He also serves as an advisor to the USAF GPS Directorate supporting space atomic clock development, modernized GPS III navigation message design, GPS accuracy improvement studies, and GPS UE development.
Arnold Colina is an electronics engineer in USNO’s GNSS and Network Time Transfer division, tasked with providing accurate UTC reference through GPS and performing calibration tests on GNSS receivers.
Timing Versus Synchronization
“They say “timing is everything” but nowadays it’s probably more correct to say “synchronization is everything”. There is a significant difference, yet many are surprised to learn they are not the same thing.
“Time dependent” applications rely on their clocks being close to the “real time”, as defined by a consensus of super-accurate atomic clocks managed by national bodies like the USNO. Once agreed upon by the labs, this “real time” can be distributed to various “time dependent” networks as a reference time to drive their operations.
“Time synchronized” applications, on the other hand, employ a methodology in which a common network time can be transferred to each network node. In other words, often the real technology enabler is that all the clocks in a defined network are synchronized to each other, even if they all run to what is any arbitrarily defined time-base. The “real time” doesn’t matter as much as how closely the node times agree with each other. As Einstein famously taught us: “Everything is relative.”
For example, accurate synchronization enables GPS positioning to work because a user’s GPS receiver relies on time-of-arrival comparisons from four or more satellites transmitting their signals at the same instant. But — even in this GPS paradigm where atomic clocks are always touted to be the most fundamental of requirements — it is important to appreciate this: A GPS user’s receiver does not care how, or to what “time,” the satellites are made synchronous. The only things the user receiver needs to know is where the satellites are, and that the satellites are synchronized when they transmit their signal.
Unfortunately sustaining high-precision, reliable time synchronization of multiple network nodes is a mammoth engineering task. Just ask the US Air Force! All clocks, no matter how accurate they are, eventually drift, so they cannot remain synchronized without comparison and adjustment.
Given the world’s exploding, insatiable demand for more data transmitted via ever-faster wireless systems, synchronization will become even more important than it is today. More wireless users and more bandwidth per user means that nanosecond — or even picosecond — network synchronization is one of the emerging engineering challenges of the 21st century. There are few resource on earth which are as scarce, or more precious today, than spectrum. So there is no question that better or cheaper ways to greatly improve network frequency and synchronization will translate directly into better use of the world’s exceptionally valuable, extremely limited spectrum resource.
Antenna maker Tallysman announces the availability of a family of high-gain (50 dB) and high-rejection timing antennas.
The antennas are specifically designed for timing applications in high-density cell/telecommunications tower applications where high levels of near-out-of-band interfering signals can be expected. They feature a 50-dB LNA gain to handle long cable runs often associated with installation on telecommunications towers.
The TW3150/52 antennas cover the GPS L1 and SBAS (WAAS, EGNOS and MSAS) frequency band and employ Tallysman’s unique Accutenna technology to provide excellent cross-polarization rejection and greatly enhanced multipath rejection.
The TW3150 antenna features a four-stage dual-filtered LNA, while the TW3152 antenna includes an additional SAW pre-filter to provide exceptional rejection of close out-of-band signals and additional protection against saturation by high-level sub-harmonic and L-Band signals. This provides better than 80-dB of signal rejection above 1610 MHz and below 1545 MHz, Tallysman said.
The antennas have a permanent mount, IP67 and MIL-STD-801F Section 509.4 compliant housing with metal base and an extended temperature range plastic radome, and is specifically designed to withstand the most challenging environmental conditions.
Two options for mounting are available: an L-bracket (P/N#23-0040-0) or a pipe mount (P/N#23-0065-0).
The Ecole Nationale de l’Aviation Civile (ENAC) and the French Space Agency’s “Satellite Positioning and Timing” Technical Skills Community (CNES CCT PDS) will hold the second edition of the International Technical Symposium on Navigation and Timing on Nov. 16-17, 2015, at the ENAC premises in Toulouse, France.
The event is based on the following key elements:
Technical presentations on hot topics related to navigation and timing.
All presentations given by invited international guest speakers recognized worldwide for their expertise.
Round tables to facilitate discussions between the audience and the guest speakers.
Registration to this symposium is free of charge. The number of seats is limited, so register as early as possible.
Program
This year, the symposium is composed of three sessions: “Positioning in Challenging Environments” , “GNSS Signals and System Design” and “Air Navigation.”
Invited guest speakers are:
Martin Haueis – Head of Localisation and Data Management, Daimler AG, Germany
Christopher J. Hegarty – Director for CNS Engineering and Spectrum, MITRE Corporation, USA
Mikael Mabilleau – Navigation Services Manager, Egis Avia, France
Mitch Narins (Invited) – Chief Systems Engineer for Navigation Programs, Federal Aviation Authority, USA
Oscar Pozzobon – Founder and Technical Director, Qascom, Italy
Mark L. Psiaki – Professor, Cornell University, USA
John F. Raquet – Director of the Autonomy and Navigation Technology (ANT) Center, US Air Force Institute of Technology, USA
Lionel Ries – Head of the Navigation/Location Signals Dept, CNES, France
Francis Soualle – Navigation System Engineer, Airbus Defence and Space, Germany
Morton Stakkeland – Development Engineer, Indra Navia, Norway
A. J. Van Dierendonck – AJ Systems, USA
Lauri Wirola – System Architect, HERE, Finland
Zheng Yao – Ass. Professor, Tsinghua University, China
“Time waits for no one,” Mick Jagger lamented in song when he turned 30. But tonight, on the evening of June 30, our clocks will stand still for a moment, waiting for the passage of a “leap second.”
The International Earth Rotation and Reference Frames Service (the world’s time monitor) has decreed that the last day of June will contain an extra second. Rather than the usual 86,400 seconds in a day, June 30 will have precisely 86,401 seconds.
National time-keeping centres around the globe, such as the National Research Council in Ottawa, will insert this extra second or leap second into their master clocks so that they remain synchronized with an international time standard. All other clocks that get their time from a master clock will be updated similarly. This includes all of the so-called time servers on the Internet, which keep our computer clocks in sync.
This global time standard is called UTC or Coordinated Universal Time. The standard was established in the 1960s once it was demonstrated that the newly developed atomic clocks could keep time with unprecedented precision and that clocks, even if they were on different continents, could be synchronized with each other to a fraction of a microsecond.
UTC is the time system kept in most countries straddling or bordering the prime meridian at zero degrees of longitude. The civil time systems in regions to the east and west of the prime meridian are typically offset by an integral number of hours from UTC. Atlantic Time, for example, is currently three hours behind UTC, so the leap second will occur here just before 9 p.m.
UTC (and the various zone or regional time scales related to it such as Atlantic Time) has replaced the previously used time scale based on the Earth’s rotation with respect to the sun for most civil time-keeping purposes.
Although the Earth appears to rotate uniformly with night following day since time immemorial, the Earth actually does not spin at a constant rate. It fluctuates slightly due to a variety of causes including variations in winds and ocean currents, the motions of the Earth’s fluid core, and the friction of tidal currents flowing along the bottom of the oceans.
Tidal friction and the other effects has resulted in a long-term or secular decrease in the Earth’s rate of rotation resulting in an increase in the length of the solar day of a little over 1 millisecond per day per century. Currently, the length of the day is roughly 2 milliseconds longer than it was in the early 1800s when it was exactly 86,400 seconds. This means that over a period of 1,000 days, a clock keeping time based on the rotation of the Earth, a time scale known as UT1, would lose about 2 seconds compared to UTC, which is based on the atomic second and referenced to the period of the Earth’s rotation around 1820.
To keep UTC to within 0.9 second of UT1, leap seconds are periodically added to UTC. While tidal friction is the primary reason for adding these leap seconds, the other factors responsible for the variation in the Earth’s spin contribute as well. In fact, negative leap seconds are theoretically possible, although all leap seconds to date have been positive.
The last leap second occurred on June 30, 2012. There have been 25 leap seconds added to UTC since the current system began in 1972. Leap seconds are applied either on December 31st or June 30. Two thirds of them have occurred on New Years Eves with the rest taking place at the end of June like the one coming up.
The world runs on UTC. Everything from financial transactions to air traffic control depends on UTC and so these systems will have to properly accommodate the leap second when it happens. This includes satellite navigation systems. The Global Positioning System itself is unaffected by the introduction of a leap second because it has its own time system, GPS (System) Time, which is not adjusted for leap seconds. GPS Time was set equal to UTC back in 1980 and is currently 16 seconds ahead of it. On July 1st, this offset will increase to 17 seconds. GPS does provide UTC to its users by transmitting the necessary adjustment data in the satellite signals, permitting a receiver to compute UTC from GPS Time.
The upcoming leap second might be the last. The International Telecommunication Union is considering a proposal that leap seconds be abolished. The justification for the proposal is that leap seconds are cumbersome and their incorrect use could lead to problems with time-dependent infrastructure including safety-of-life navigation systems.
At an ITU meeting in Geneva in January 2012, national delegates debated a motion to eliminate the use of leap seconds in the UTC time scale. However, there was no agreement with countries evenly split in favour of, against, and undecided about abolishing leap seconds. Many of the undecided delegates said they were not sufficiently informed about the proposal to make a decision. The ITU will next consider the proposal in November 2015.
The world’s clocks will be adjusted by one second on June 30, when a leap second will be inserted into Coordinated Universal Time (UTC), the standard international time scale.
In theory, all UTC clocks should insert a second labeled 23h 59m 60s (the leap second) following one labeled 23h 59m 59s UTC. This is equivalent to having all of the clocks in the world stop for one second at that time, as explained in May’s Expert Advice column.
The financial market has prepared for potential disruptions. The adjustment could present technical difficulties for traders and exchanges, as some computers might not be programmed to account for the adjustment.
One company preparing is Racelogic, who makes the LabSat simulator. Racelogic will be recording the leap second as it happens and will then have the scenarios available for customers to replay. A variety of recordings will be taken: GPS, GLONASS, and BeiDou constellations will each be captured as a single channel, and also as a simultaneous triple-constellation recording. These will then be available to use with the LabSat.
Jackson Labs has released new firmware versions for various products that address any potential issues for the pending and future leap second events, and that add a number of additional commands to query and handle leap second events.
Precise Time and Frequency, Inc., has published a paper, “Phase Error Correction — Precision versus Speed,” which describes atechnique for rapidly eliminating very large phase offsets (up to 0.5 seconds) between two 1 pulse per second pulses. The change is achieved without a sudden step change (which can be unwelcome in numerous applications) while retaining the ability to tune the phase with high precision (resolution of 0.006 pico seconds) once the large error is eliminated.
“Like many novel ideas, the simplicity of this technique belies its effectiveness,” according to the paper. “With hindsight it seems like an obvious solution; however, the engineering mind is trained to know that to generate a one-second pulse from a reference frequency (in this case 10 MHz), it must be divided by the frequency itself, and the concept of an ‘incorrect’ divisor is not necessarily so obvious. In this case, however, the technique provides an ideal solution that reduces the phase-lock capture time from something that would be intolerable to a very acceptable time period.”
Two of the Institute of Navigation’s (ION’s) conferences — the International Technical Meeting (ITM) and the Precise Time and Time Interval (PTTI) Meeting — will be co-located for 2016. One registration fee gives attendees access to both technical events and a commercial exhibit. The co-located conferences will take place Jan. 25-28, 2016, at the Hyatt Regency Monterey in Monterey, Calif.
Abstracts are due Oct. 2, 2015. Submission requirements have changed, and depend on the session the abstract is submitted for. Review the call for abstractsfor more information.
This year’s joint ITM/PTTI Plenary Session is “Autonomous Vehicles – Beyond the Navigation Technology.” The session will address issues outside of navigation technology, including legal issues, regulatory challenges, transitional periods, markets enabled by autonomous operation and similar topics beyond the core navigation technology.
ITM is ION’s winter meeting, which features peer-reviewed technical papers related to positioning, navigation and timing, and includes the ION Fellows and Annual Awards presentations.
PTTI is the annual technical conference designed to disseminate and coordinate PTTI information at the user level, review present and future PTTI requirements, inform government and industry engineers, technicians and managers regarding precise time and frequency technology and its problems, and provide an opportunity for an active exchange of new technology associated with PTTI.
The co-located 2016 ITM and PTTI meetings will feature a technical exhibit and showcase of products and services related to positioning, navigation and timing. For more information on exhibiting, contact ION or go to www.ion.org.
40th Annual NIST Time and Frequency Metrology Seminar
There were four of us, mature males who all remember having a crush on Annette Funicello, were seated around a table avidly discussing deviant behavior with a sometimes rapt mixed-gender audience. The four of us, loudly discussing deviant, and only occasionally aberrant behavior, were doctors: David Allan the world renowned creator of Allan Deviation or variance fame, Judah Levine, world renowned nuclear physicist and Father Time of NIST (National Institute of Standards and Technology), Neil Ashby, former chair and currently Professor Emeritus of Physics at UC Boulder, also from NIST, along with yours truly representing GPS World magazine and the Institute for Defense Analyses. Our ever-changing audience was composed of the 40+ members from around the globe attending the 40th Annual NIST Time and Frequency (T&F) Metrology Seminar, held June 2-5 in stunningly beautiful Boulder, Colo.
Of course, the numerous deviant behaviors under discussion had more to do with the sometimes-fickle performance of various atomic reference systems than they did anatomy. And we were speaking loudly because that is what most men of our age do. Dr. David Allan frequently threw in quotes and anecdotes from his recently published book on time, It’s About Time, about which you will read more later.
The NIST T&F Metrology Seminar is truly one of a kind, easily the best in the world for time and frequency metrology. I have been fortunate enough to attend numerous times. I can truly say I have never found it repetitive or boring. There are so many exciting discoveries concerning time, which David Allan staunchly maintains is a purely human construct, and how time applies to our everyday lives, especially to GPS — all PNT systems actually — that it is impossible not to be constantly fascinated.
NIST Mission
NIST Boulder is all about research and development for timing standards, which is a benign way of saying NIST SMEs (subject matter experts) are the world’s foremost authorities on time and metrology. To wit, NIST has produced no less than four Nobel Prize winners in metrology, the last being awarded in 2012. The atmosphere at NIST and the University of Colorado Boulder campus is such that you can’t help but feel certain there are more Nobel Prizes for NIST on the horizon.
David Howe (Ph.D.), my NIST host and group leader of the Time and Frequency Metrology Division, explained that his organization, which sponsors the seminar, is an operating unit of the Physical Measurement Laboratory of the National Institute of Standards and Technology (NIST), an agency of the U.S. Department of Commerce. The NIST T&F Division is located in Boulder at the NIST Boulder Laboratories, just across from the street from the University of Colorado. Many of the NIST researchers are also University of Colorado professors, adjuncts or graduate students.
The NIST mission includes:
Maintaining the primary frequency standard for the United States
Developing and operating standards of time and frequency
Coordinating United States time and frequency standards with other world standards
Providing time and frequency services for United States clientele
Performing research in support of improved standards and services
Precise time and frequency information is required by electric power companies, radio and television stations, telephone companies, air traffic control systems, participants in space exploration, computer networks, scientists monitoring data of all kinds, and navigators of many types. These users need to compare their own timing equipment to a reliable, internationally recognized standard. NIST provides this standard for the United States.
Of course one of the largest distribution networks for timing data is through the Global Positioning System (GPS), which provides this data globally to more than 4+ billion users and millions of timing systems everyday, numerous times per day. The number of times GPS time is utilized per day is almost impossible to calculate, but most certainly resides in the trillions.
The NIST Time and Frequency distribution system delivers NIST Internet time over the Internet at the rate of 8 billion requests per day from servers at 25 locations across the United States.
The frequency stability provided by classic Cesium and Rubidium atomic reference systems onboard GPS payloads have historically been on the order of 1 x 10-14. While this is the stability provided by the GPS IIF rubidium clocks, currently the rubidium clocks being prepared for GPS III are achieving frequency stability on the order of 1 x 10-15 under laboratory conditions, an order of magnitude better than the current on-orbit clocks.
This is actually an amazing feat. For those of you who don’t deal in scientific notation on a daily basis, this means — since it is on a logarithmic scale — that the frequency stability of GPS III’s atomic clocks have the potential to be 10 times as stable as the IIF clocks, which are currently the most stable and accurate GPS clocks on orbit to date.
Where atomic reference systems are concerned, we routinely speak of frequency stability and not clock accuracy. It is the stability over measured epochs, short and long, that matters most. Indeed, it is the oft-misunderstood frequency stability uncertainty expressed as delta f/f = 1 x 10-16 that produces the clock accuracy to within one standard (SI) second in three hundred (yes, 300) million years — a statistic that is obviously not directly observable, but reasonably predictable. Hence, as Judah Levine often says, where stability is concerned you are an historian, but where accuracy is concerned you are a prophet. NIST defines an SI second as the duration of 9,192,631,770 cycles of the cesium hyperfine transition.
Tom O’Brian, the current chief of the NIST Time and Frequency Division, explained that this level of precision is equivalent to measuring the distance from the Earth to the Sun, a distance of 150 million kilometers, to the uncertainty of 15 microns or 1/10 the thickness of a human hair. While that is impressive, the best is yet to come. NIST is currently working on research-grade optical clocks, which we could reasonably expect to see on orbit one day in future GPS payloads, with an optical frequency stability equivalent to delta f/f = 2 x 10-18 or accuracy equal to 1 second in 15 billion years. Again this is the equivalent of measuring the distance from the Earth to the Sun to an uncertainty of 0.3 micron or the size of a virus.
So What?
Many of you may be asking why, as a GPS user, or merely as a user of technology, you should care about accurate and stable time reference systems. Marc Weiss, a long-time acquaintance and noted researcher at NIST (now in semi-retirement), very eloquently put his thoughts about time in an introduction to a recent timing white paper*, which has been slightly edited for length, current trends and readability. [Ed. So as to not be accused of putting words or opinions in the authors’ mouths, we have provided a reference for the unedited paper at the end of the referenced section]. Marc and several other metrology luminaries express their feelings concerning the future of time and why we should all care:
We stand at the advent of a revolutionary new economy fueled by the global Internet of Everything (IOE). The IOE is a combination of traditional telecom systems with a growing need for wireless technology, and the emerging Internet of Things (IOT) including Machine-to-Machine (M2M) technology. Several current technology providers predict there will be a trillion global endpoints connected to the Internet by 2022, with $14.4 trillion in value at stake.
One fundamental enabler of this revolution is a marriage of timing signals and data that breaks through existing barriers. Currently, optimal use of data in computing and networking is anathema to optimal use of timing signals. Computer hardware, software and networking all isolate timing processes, allowing the data to be processed with maximum efficiency due in part to asynchrony. Yet, the coordination of processes, the time stamping of events, latency measurements and optimal use of precious spectrum are all enabled by ever more accurate and stable timing.
Timing is critical for the future development of and improvements to several high-value applications. For example, in smart transportation systems the exchange of information between vehicles, highways, and civil authorities depends on a robust ubiquitous timing system to ensure the rapid, accurate synchronization and provenance of data. Similar requirements are found in the operation of power grids, especially now that wind farms, solar arrays and the like require different control strategies, which are a critical part of the system. Modern medical applications such as tele-surgery and real time integrative online medical conferences, as well as applications in financial systems are all important examples that require accurate and stable timing signals and may well affect us all.
There are three different types of timing signals for dependable synchronization: frequency, phase, and time. Frequency can be supplied by an individual clock, such as a commercial (atomic) Cesium or Rubidium standard, though practicality drives the use of local oscillators that require calibration and active reference signals. [Ed. Many of these local reference systems and oscillators are routinely updated by GPS signals.] By contrast, phase and time synchronization always require the transport of timing signals plus data. Timing signals are physical, they occur on the physical layer of networks. Indeed the IoT has many devices and applications that require frequency, time and/or phase synchronization. Frequency, time and phase all need to cross layers, boundaries, and networks from their sources in accurate clocks. Requirements for these transfer systems include parameters that create different, perhaps orthogonal, demands on systems. Accuracy, stability, integrity and even non-repudiability requirements are realized with varying demands on different systems….
To facilitate the massive growth of the IoE, data processing and networking require new designs at fundamental levels, allowing integration with precise and verifiable time, frequency and phase signals.
Timing performance is fundamentally dependent upon an underlying oscillator, or ensemble of oscillators and the clocks constructed based on these oscillators.
However, it is apparent to us that many of the researchers and developers of the various time aware systems operate independently of each other. They attend different conferences, read different literature, and in general do not interact sufficiently to achieve the breakthroughs needed. In our minds this calls for a dedicated and collaborative “across the stack” research collaboration focused on two or three comprehensive challenge problems.
Fortunately, this is what researchers, scientists, analysts and metrology experts do at NIST and what we learned about during the T&F Metrology Seminar. The bottom line is many perturbations affect timing signals from atomic reference systems and even local quartz oscillators (clocks). The more these perturbations are understood, the easier they are mitigated and the more stable and accurate our timing signals will be and the faster technology — PNT (position, navigation and timing), clock and otherwise — advances.
For many traditional timing applications and developing “post-timing” applications, stability is more important than accuracy; just as for most advanced technology applications, frequency is more important than time of day.
NIST clearly states its Time and Frequency Metrology Group has the world’s most advanced measurement and calibration facilities for characterizing noise components in oscillators and frequency synthesizers. NIST engages in numerous research and development activities to determine the cause of various types of noise for the purpose of isolating and reducing it, leading to improved components, instruments, techniques and results that are often critical in modern applications. In other words, you have to thoroughly understand a clock issue before you can begin to mitigate issues affecting it. NIST, a synecdoche for understanding time, does that better than any other metrology laboratory in the world today when it comes to atomic reference systems.
What Is Time and Why Does It Matter?
Accurate timing and synchronization are a crucial part of the world’s critical national infrastructure and of modern technology in general, especially the timing signals from GPS satellites, which are used by billions of users continuously every day — although most users remain unaware of the importance and impact that accurate and stable timing has on their everyday lives.
Tom O’Brian reminded us that even St. Augustine of Hippo wondered about time. In circa 400 he wrote:
“What then is time? If no one asks me, I know. If someone asks me to explain, I know not.”
Then, just 1500 years later in 1930, Albert Einstein had this to say about time:
“Space and time are modes by which we think, not conditions under which we live.”
Therefore, I agree with David Allan when he posits that time is a human invention with which only humans struggle. Be that as it may, it is still a condition we live under, and when you consider all the forces, minute to infinite, that affect atomic reference systems and clocks in general, it is amazing our clocks function as well as they do.
Consider that atomic clocks, and even quartz clocks to some extent, are affected by the following elemental and environmental forces and more in the laboratory:
Motion
Acceleration
Gravity – Earth, Moon and planetary
Changes in elevation
~23 different types of noise
Temperature
Magnetic fields
Earth’s Poles
Tides
Light (including lasers)
Electricity
General and Special Relativity
Radiation
The United States Air Force then takes these delicate clocks, atomic (Rubidium and Cesium) as well as quartz VCXOs and OXOs, and launches them (with violent maneuvers) into space in a Medium Earth Orbit that regularly intersects the Van Allen radiation belt. Once on orbit, the clocks routinely experience every one of the listed forces and more on both a regular and changing basis. Of course, we expect the GPS clocks to operate at the same standards and with the same stability and accuracy they displayed in the laboratory. Not asking much are we?
The amazing fact is that thanks to the dedicated scientists and physicists at NIST and other timing laboratories, the clocks work as advertised and continue to do so sometimes for more than 20 years. The current GPS III Rubidium clocks being tested and aged at NRL (Naval Research Laboratory) and other locations around the U.S .are posited to be the first 30-year Rubidium standards with nominal frequency stability of 1 x 10-15. This should provide GPS with another nanosecond of timing accuracy and another 12 inches of positioning accuracy. There will be three of these extremely stable Rubidium clocks on board each GPS III satellite — no Cesium clocks for this family of satellites. Horologists around the world are hoping it is truly a 30-year tube and that only one Rubidium will be required. Only time will tell.
Little Known Factoid (LKF): The first family of GPS satellites on orbit made use of a General and Special Relativity switch that could be set in one of three positions: neutral, plus or minus, depending on whether the universe was relatively static, expanding or shrinking in size. Guess where the switch was set initially and (hint, hint) it could be changed via software from the ground. Drop me a line @ [email protected] and let me know what you think — posit or know, as the case may be.
Thanks
My thanks to David Howe, Judah Levine, Neil Ashby, David Allan (Ph.D.s all) and Danielle Lirette, who made my visit to NIST such a wonderful experience.
It’s About Time
Earlier I mentioned physicist David Allan’s wonderful book, published in 2014. It’s About Time: Science Harmonized with Religion. Allan is about science harmonized with religion and where we are in God’s time. I am halfway through the 402-page tour de force on time, and it is a fascinating read. It is a 50-year biography and history of atomic reference systems, since the first atomic clock only came about in 1949. You’ll be amazed how that happened. Based on what I have read so far, I highly recommend this scientific tome, which is very readable and understandable even for the lay reader. I promise a full review in a future column.
Until then, Happy Navigating! I hope to see many of you at ION JNC (Institute of Navigation Joint Navigation Conference) in Orlando, Fla., June 21-26. There will be a classified day on Thursday, June 25, and a Warfighters Panel as well. Hope you can join us. Remember, GPS is brought to you courtesy of the United States Air Force.
The coming leap second on June 30 sounds as scary as the (turns out not-so-scary) Y2K bug. But the world has experienced leap second issues before, and most affected industries are taking steps to prepare.
The world’s clocks will be adjusted by one second on June 30, when a leap second will be inserted into Coordinated Universal Time (UTC), the standard international time scale. In theory, all UTC clocks should insert a second labeled 23h 59m 60s (the leap second) following one labeled 23h 59m 59s UTC. This is equivalent to having all of the clocks in the world stop for one second at that time, as explained in May’s Expert Advice column.
A problem with some GPS receivers implementing the extra second caused the U.S. Civil GPS Service Interface Committee (CGSIC) to issue a notice in February. But GPS receivers aren’t the only thing that could be affected.
The Wall Street Journal is reporting that financial regulators and market participants are worried enough about the leap second that they’re planning for potential disruptions. The adjustment could present technical difficulties for traders and exchanges, as some computers might not be programmed to account for the adjustment, according to a Dow Jones report.
“These guys are agonizing over it,” Steve Allen, a programmer-analyst at the University of California’s Lick Observatory, told Dow Jones. “It is definitely a hassle.”
A U.S. Commodity Futures Trading Commission spokeswoman said that “For the most part, we’re not too worried,” told Dow Jones. “But of course as the regulator, we do need to ensure folks are ready.”
The last leap second occurred on June 30, 2012, and that leap second caused technical problems for websites and computing systems — including Reddit, Mozilla, Gawker, FourSquare, Yelp and LinkedIn.
Google had prepared ahead of time and was unaffected. Google gradually adds a couple of milliseconds to its servers’ clocks throughout the day when a leap second is to occur. According to a 2011 Google blog, “We modified our internal NTP servers to gradually add a couple of milliseconds to every update, varying over a time window before the moment when the leap second actually happens. This meant that when it became time to add an extra second at midnight, our clocks had already taken this into account, by skewing the time over the course of the day.”
But many web services didn’t follow Google’s lead in 2012 and experienced disruptions. Qantas‘ computer system went down for hours, forcing employees to check in passengers by hand. For background on the 2012 event, and a good explanation on the reason for a leap second, read “Time to Get in Sync” by Richard Langley, GPS World Innovation editor.
Amazon Web Services said it plans to “implement alternative solutions to avoid the ‘:60’ leap second. This means that AWS clocks will be slightly different from the standard civil time for a short period of time.”
In the U.S., stock exchanges such as the New York Stock Exchange and Nasdaq are working around the leap-second time (8 p.m. in the U.S.) by closing its after-hours trading a half-hour early, which is scheduled for 8 p.m.
The Hong Kong Observatory is advising stakeholders and operators in information technology, telecommunication, transport, and finance to review whether systems under their management can handle leap seconds properly, and if necessary, consider testing and adjusting their systems to ensure normal operation during and after the introduction of the leap second.
Time and frequency company EndRun Technologies is offering leap-second information on its website, and Cisco is offering its customers guidance on how to deal with it.
Racelogic, who make the LabSat simulator, will be recording the Leap Second as it happens and will then have the scenarios available for customers to replay. A variety of recordings will be taken: GPS, GLONASS, and BeiDou constellations will each be captured as a single channel, and also as a simultaneous triple-constellation recording. These will then be available to use with the LabSat.