
Who is MicroPilot? For almost anyone in unmanned aerial vehicle (UAV) electronics — or, rather, avionics — MicroPilot is probably a familiar name. The company makes the autopilots that basically fly the vehicle. An autopilot is the business-end of the navigation guidance system on a UAV. It takes input from sensors — typically GPS, air data, and inertial/gyro, which can be internal or external to the autopilot — and provides signals that adjust the flight controls to null out errors between the planned flight track and the actual flight profile that the UAV is flying.
A typical UAV autopilot uses GPS/inertial/air data to generate position information for route and waypoint navigation as well as hold modes where altitude and heading are maintained. In addition, it will accept commands from a remote ground-control station to modify the waypoints and route, to go to a specific waypoint, or to land, circle or fly a particular pattern. Telemetry data is also sent to the ground station to monitor status and flight progress. The autopilot acts as a central point within the UAV, communicating to and controlling onboard equipment such as pan-tilt cameras and transponders. The autopilot is also responsible for handling a variety of error conditions, such as loss of communication link or GPS.
MicroPilot was started 20 years ago by Howard Loewen, who is the sole owner and CEO. A licensed pilot, Loewen decided to make a model plane fly all by itself. With a bunch of aero textbooks, a couple of model airplanes, a single-board computer, gyros and a GPS receiver, he basically taught himself how aircraft fly and how to model (simulate) an aircraft. He developed autopilot software and a basic six-degree-of-freedom (DOF) simulator. Linking the simulator software to the autopilot software, he could test fly the autopilot on his PC. This same architecture is still in use at MicroPilot today and enables much more efficient development and testing of autopilot systems.
After many thousands of hours of simulated flight, actual flight testing was, at first, quite difficult for him to master. However, he gained lots of experience during a successful flight test campaign. Then Loewen put together a web page describing what he was doing. Not too long after the web page went live, the phone began to ring, and not long after the phone calls started, orders began to come in. MicroPilot wasn’t the only company selling autopilots at that time, but it may be the only one from that time that is still around.
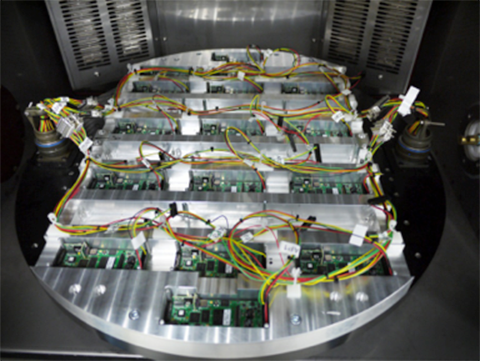
The company staff jointly decided that they should focus on the high-end commercial UAV market, so there had to be significant investment in production and development processes. Early on, an automated sensor calibration system was developed, which has recently been upgraded to use a two-axis rotating temperature chamber. This system allows MicroPilot to load up a couple dozen autopilots, and a few hours later fully calibrated and tested autopilots emerge! So, peak demand is readily accommodated, and MicroPilot staff is able to focus on product and process improvement rather than on labor-intensive manual testing.
The professional market is a more challenging customer base because customers fly much more expensive vehicles. While there is currently a lot of focus on low-cost hobby autopilots, these are seen as an interim step until there are proper regulations. In the end, UAVs are aviation products, and for many applications they require a high level of reliability and availability. No one is going to be flying 55-pound helicopters over a city without an autopilot that has undergone vigorous validation and verification processes. MicroPilot autopilots have a large number of options that enable configuration of the control system for the type of vehicle — for instance, fixed wing, multi-rotor, helicopter, or aerostat/blimp. Once the type of vehicle has been selected, the gains of the various feedback loops that control the vehicle are configured. There are also quite a few options for payloads and other onboard devices such as transponders and cameras.
MicroPilot is based in Winnipeg, Manitoba, Canada. The city is large enough to have a pool of talented engineering and computer science graduates. While the winter climate can be quite harsh, the city is not so large that there is much trouble finding a place to test fly. The MicroPilot facilities are about six miles outside the city, and the staff is able to test fly right outside their building under a Transport Canada special flight operations certificate. MicroPilot has 27 employees, ships in the order of 1,000 autopilots per year, and has 850 customers in 70 countries.
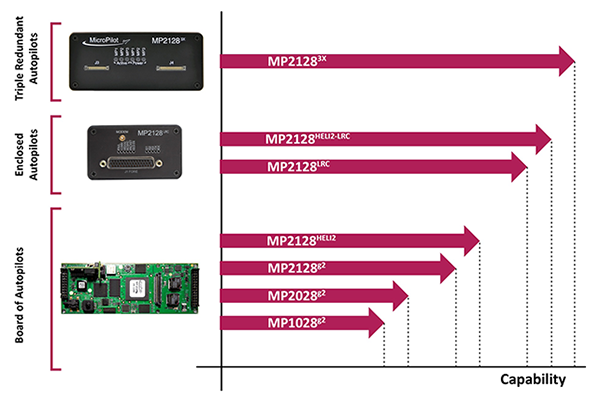
Regulation is the key to moving the commercial UAV market forward — a huge market is already flying sophisticated, expensive sensor payloads over cities. Even a moderate-size Multirotor UAV poses some safety risks, and it is important that regulators quickly devise rules to allow safe flight of these sensors over populated areas. MicroPilot has been working on improving its product offerings so that when regulations finally appear, the company will have products with the right capability and implemented correctly, so regulators should be able to readily establish that its products are safe. To this end, the first triple-redundant autopilot was introduced four or five years ago. It is still the only triple-redundant UAV autopilot available. Triple redundancy implies that two out of three channels could totally fail, and no failure will carry over from one channel to another, so autopilot functionality for the vehicle would still be maintained.

trueHWIL is a high-fidelity simulator that MicroPilot has developed where the sensors are stripped from the autopilot and the sensor inputs are simulated electrically. The simulator also reads control-position information from the autopilot. Under this simulator, the autopilot receives sensor data as if it is in the air. The code paths that the autopilot software executes are identical to those in a real autopilot in flight. Customers use this tool to build “iron-bird” simulations of the vehicle on the ground to validate the configuration prior to flight. It enables week-long or longer instrumented flight tests to be performed that would be difficult or dangerous to perform in real life.

Finally, the xtender validate product has been developed. This requirements capture system allows customers to link system requirements to autopilot or ground control system (GCS) settings. It also allows the system designers to develop electronic flight-test cards linked to requirements. After flight test, the resulting data logs can be linked back into the xtender validate database and will also be automatically linked to the requirements used to define the flight-test card. This simplifies the flight-test process and allows managers to see that the system requirements have been completely exercised by flight testing.
MicroPilot integrates a number of different GPS receivers into its autopilots, including Trimble, u-blox and Novatel.

Sky Sapience in Israel has developed a unique HoverMast-100 solution for short-range, over-the-horizon reconnaissance. This UAV on a tether requires a high level of stabilization, which the MicroPilot autopilot enables. The tether allows for deployment up to a height of 50 meters within seconds, and the UAV can carry a 13-pound payload for a video camera, IR sensor, laser rangefinder, RF relay or other sensor — real-time data is transmitted to users over a wideband radio link. Armed forces in the United States, Israel and Asia are using the HoverMast-100. Commercial applications include power-line inspection, oil and gas pipelines, security, perimeter security, oil rigs, boats, agriculture, communication, sports events and disaster relief.
MicroPilot’s customer base is worldwide, with almost 1,000 different organizations having dealt with the company over the years. The range of applications goes from researchers flying a very odd vehicle with the ailerons split into a dozen segments (each controlled separately) all the way to customers using the system for traditional intelligence, surveillance, and reconnaissance (ISR), such as Bluebird Aero Systems. There are also customers that make multi-rotors (the proS3 in Italy) for a variety of data-collection needs; customers that fly targets (Avartek of Finland); customers that fly helicopters for video filming and emergency responders (Bertin in France and Helicam Pro in Italy); and customers that use UAVs in aerostats (Top I Vision in Israel). There are also a bunch of universities doing research using UAVs, and a couple of customers flying turbine powered UAVs.
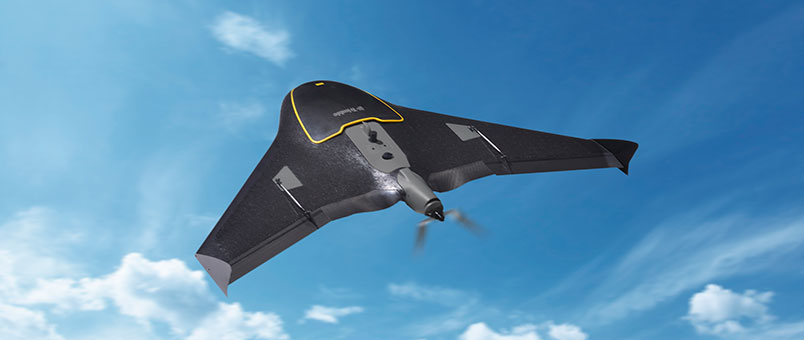
In recent related news, Trimble just got a special exemption from the FAA to allow its UX5 survey UAV to operate in the U.S., along with a bunch of common-sense limitations — the UX5 uses a MicroPilot autopilot.
So, for a significant number of UAV manufacturers and operators spread around the world, MicroPilot has become the supplier they rely on for autopilot solutions. And with the FAA now issuing what seems to be daily exemptions that allow commercial use of UAVs, it’s good to know that at least one autopilot supplier is already working towards the reliability and availability that certified applications of these vehicles will ultimately require.
Tony Murfin
GNSS Aerospace




