CHC Navigation (CHCNAV) has released the Apache 6–2026 Edition, an integrated unmanned surface vessel (USV) designed for high-resolution bathymetric and 3D mapping applications. Built to accommodate NORBIT multibeam echosounders, the Apache 6 delivers a comprehensive solution for underwater surveying, object positioning, and offshore construction support in varying aquatic conditions.
The Apache 6 – 2026 Edition is optimized for seamless integration with the NORBIT iWBMS and WINGHEAD series of multibeam echosounders. An optional NORBIT iLiDAR can also be integrated, allowing for the simultaneous collection of marine and terrestrial 3D data in a single pass. This capability is particularly efficient for projects that require mapping both underwater topography and overhead structures, such as bridges and power lines, making it a comprehensive tool for harbor, river and infrastructure surveys.
Automated Sound Velocity Profiling Accurate sound velocity measurement is fundamental to high-quality bathymetric data. The Apache 6 – 2026 Edition addresses this with an optional automated sound velocity profiler (SVP) kit. This system can be controlled directly from the remote controller, allowing the operator to perform SVP casts on-demand without interrupting the survey workflow. The kit is designed for rapid deployment — attachable or detachable in under a minute — ensuring that the multibeam echosounder data is continuously corrected with the most accurate sound speed information, which is critical for meeting stringent survey specifications.
The USV combines a detachable triple-hull vessel design with smart rotating propeller technology to deliver both stability and agility in varied conditions. The robust hull configuration ensures reliable performance in strong currents, while removable side floats enable safe operations in shallow waters. Intelligent propeller control adjusts water flow direction to achieve a turning radius of approximately two meters, supporting effective navigation in confined or winding channels.
Android-Based Control Survey operations are streamlined through an intelligent Android remote controller, which provides real-time access to vessel status and data without the need for a separate field computer.
The interface allows for straightforward management of the survey workflow, while a multi-link communication system ensures reliable data transmission over long distances. This setup enables surveyors to maintain seamless control over the Apache 6 and monitor mission progress effectively from the shore.
At a recent product launch event, ComNav Technology unveiled a new technological ecosystem for surveying. Under the theme “From Earth to Ocean,” the company presented a suite of next-generation innovations engineered to advance the frontiers of geospatial and hydrographic intelligence.
ML300 mobile laser scanning system
Precision surveying in complex environments
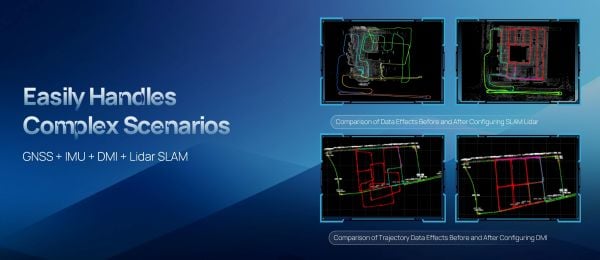
The ML300 mobile laser scanning system is designed for large-scale surveying projects and complex environments. It incorporates multi-mode fusion positioning technology, integrating GNSS, IMU, DMI and laser SLAM, providing a new approach to 3D scene reconstruction.
This system is designed for environments where GNSS signals are limited or entirely lost, such as tunnels, urban canyons, and densely built-up areas. In these challenging environments, traditional surveying methods often fail to deliver the required precision, but with ML300’s intelligent multi-mode positioning, we ensure accurate 3D scene reconstruction regardless of the conditions.
The ML300 mobile laser scanning system incorporates multi-mode fusion positioning technology. (Photo: ComNavTech)
The core advantages of the ML300 lie in its high precision and flexibility. By combining Laser SLAM and DMI technologies, it can operate effectively without GNSS signals, eliminating errors and improving modeling accuracy. This breakthrough offers new solutions for large-scale land surveys, urban infrastructure monitoring, and smart city planning, among others.
Designed for operational efficiency, the ML300 boasts a modular and highly flexible design. It can be customized with various sensors, including road cameras, Ladybug 6 panoramic cameras, and wheel encoders, making it adaptable to a wide range of project needs. Additionally, with up to 6 hours of battery life and external power source support, the ML300 ensures stable performance during long working hours.
Whether for highway surveys, urban power line inspections, dynamic forestry management, or smart transportation system development, the ML300 provides precise and efficient data support, facilitating digital transformation across various industries.
The SV3 USV is designed to be portable and usable by a single surveyor. (Photo: ComNavTech)
SV300 unmanned surface vessel
Intelligent underwater surveying
The SV300 unmanned surface vessel was designed specifically for intelligent underwater surveying. This autonomous vessel is optimized for operation in complex aquatic environments, integrating high-precision GNSS positioning, AI technologies, and autonomous navigation capabilities, enhancing both the efficiency and accuracy of hydrographic surveys.
Its design focus on making underwater exploration smarter, safer and more efficient. Its ultra-light design (28 kg) and compact hull (less than 1 meter in length) enable single-person operation. The SV300 can be stored in the trunk of a small vehicle.
Equipped with a high-performance single-beam bathymetric measurement system, the SV300 can measure depths up to 200 meters, ensuring reliable data. Its streamlined hull and powerful motor enable a top speed of 7 meters per second, accelerating survey speeds without compromising accuracy.
The intelligent features of the SV300 enhance measurement efficiency and ensure the safety of personnel. Whether used for river, lake or ocean surveys, or in emergency response and pipeline inspections, the SV300 adapts to complex environments inunderwater exploration.
HYD10 portable echo sounder
Compact and precise
The HYD10 is a lightweight, high-precision echo sounder designed for modern surveying tasks. Weighing 0.3 kg for the main unit and 1.5 kg for the transducer, its portability means a single operator to carry and operate. Its compact design and Bluetooth capability allow it to function seamlessly in tight spaces and complex environments, removing the need for cumbersome cables.
With a measurement depth range of 0.3m to 200 m, the HYD10 provides high-precision readings with accuracy ±1 cm + 0.1% of water depth and 1 cm resolution. The 200 kHz depth module and narrow 6° beam angle ensure precise, clear data, while an adjustable sound speed range (1300-1700 m/s) adapts to different water conditions.
For greater operational flexibility, the HYD10 integrates with Survey Master software, supporting real-time monitoring, data processing and wireless connections through Wi-Fi and Bluetooth. It is compatible with a variety of positioning devices, including the P6H and P8H tablets, as well as a wide range of RTK receivers. The P6H provides centimeter-level positioning accuracy, while the P8H offers flexible antenna adjustments for various field conditions.
The R80 GNSS Data Collector is designed for modern surveying. (Photo: ComNavTech)
R80 GNSS data collector
Precision in surveyors’ hands
The R80 GNSS data collector is designed to improve field technology, engineered for demanding tasks in construction, mining, surveying and GIS. The R80 has an octa-core processor, delivering rapid CAD and map loading to ensure smooth operation and boost productivity. The ergonomic design with an 18-degree grip angle maximizes one-hand comfort, reducing fatigue during long hours of operation.
The R80 features ultra-wide mechanical keys with tactile feedback, offering precise control with a 0.8 mm travel and pressure sensing. It includes custom quick-measure keys for easy access to measurement functions. The 51-key backlit keyboard and a 6-inch 1080P display ensure clear visibility even in direct sunlight. With a 9000 mAh battery, it supports more than 16 hours of continuous operation. It holds an IP67 rating for water and dust resistance and has passed a 1.5-meter drop test.
It supports 4G LTE, Bluetooth, Wi-Fi and NFC, and has a 13MP autofocus camera for high-definition imagery. Survey Master software, integrated with a CADX engine, enables instant opening of large drawings and ensures smooth field operations.
While on public roads self-driving cars are still years away, autonomous systems are already common in much less congested and/or much more controlled environments — such as farm fields, ports, mines, rivers, and in the air — where the risk of a collision causing injuries or fatalities is smaller by orders of magnitude. From unmanned aerial vehicles (UAVs) taking aerial photographs, to unmanned ground vehicles (UGVs) spraying vineyards, to unmanned surface vessels (USV) conducting hydrographic surveys, autonomous or semi-autonomous systems are generally much safer, more efficient, and cheaper to operate than their manned counterparts.
Whether they have wheels, hulls, or wings to properly perform their tasks, autonomous systems need to know — with great accuracy — their position, heading and attitude (roll, pitch, yaw, surge, sway, and heave). For example, to spray grapes in a vineyard, an autonomous system needs to know not only its exact position but also whether it is level or tilted to one side due to uneven terrain, lest it spray the ground or into the air instead of the grapes. Similarly, a survey vessel’s pitch, which depends on its speed through the water, and its roll, due to waves and wind, affect the direction of its sonar beams.
Knowing a platform’s position, heading and attitude requires tight integration of the outputs of GNSS receivers and inertial navigation systems (INS). This enables autonomous systems to compensate for their movements — either physically and in real time, by orienting their sensors or tools, or in software when post-processing the data they collected.
The following three case studies sample current developments in autonomous systems on land, in the air, and on the water.
To improve the efficiency of their hydrographic surveying services and expand them, Coastal Geomatics evaluated multiple USV, choosing the CHC Apache 4. (Image: Coastal Geomatics)
Time (and costs) saved using unmanned surface vessels (USV) over conventional methods for hydrography can be dramatic — especially in autonomous mode. Numerous firms, large and small, have discovered how modest investments in such craft can completely revolutionize their hydrographic operations. One such firm is the family owned and operated Coastal Geomatics in North Carolina.
“With conventional methods, it used to take us four weeks with a three- or four-person crew to do the bathymetry for 26 canals that we do every two years for the City of Holden Beach,” Chris Stanley, owner and manager of Coastal Geomatics, said. “Now, with our Apache we do this over four days of high tide; about four to five hours per day.”
Stanley had been surveying in the local area for more than 30 years and had partnered in several local firms. In 2020, he decided to start his own firm, together with his two adult sons Alan and Ian: Coastal Geomatics was born.
“We do a lot of boundary work, and topographic surveys as there is a lot of construction going on in the area,” Alan said. “We also do flood insurance work, FEMA elevation certificates, and hydrographic work — we are on the coast.” Holden Beach is on one of North Carolina’s barrier islands, separated from the mainland by the Intercoastal Waterway. Coastal Geomatics has standing contracts to do hydro work for FEMA beach erosion annually, and the biennial canal surveys for the city.
The move to a USV for hydrographic surveys made a lot of sense, however a past bad experience with the technology prompted Stanley to be extra diligent in choosing a boat. At one firm for which the elder Stanley had worked in the past, they had acquired a USV that he said was essentially “a jet ski, with a mix of components cobbled together.” He added that they had never really gotten it to work right, and it now sits idle in a storage unit.
The Stanleys did some research on the current state of small USV, noting that some still seem like “contraptions” and decided instead to test out three models from CHC Navigation: the Apache 3, 4, and 6. They had considered the tri-hulled Apache 6 for some offshore work they sometimes do, however, they chose the Apache 4 for now. It has a dual GNSS antennas for position and heading that is tightly coupled with an IMU for uninterrupted positions, a single beam echo sounder, and a 360° camera. It has a sensor well that can accommodate most of the popular models of acoustic doppler current profilers (ADCP), though Coastal Geomatics is not presently using an ADCP. It can be run fully autonomously for missions defined in the AutoPlanner software, or remotely piloted — Coastal Geomatics needed both options. They noted how the boat is compact, easy to operate, and all components are well integrated with watertight seals.
For open water areas of their contracted surveys, they put the USV in full autonomous mode, where they say it is quite efficient. However, there are specific tasks where a remote pilot needs to take over.
The canals surveyed for the city to inform dredging operations are about 100 feet wide and each house has a floating dock. There is a 20- to 30-foot strip between the docks. The old method, Ian explained, was to put one of the crew in a small flat bottomed Jon boat, with a crew member on each side of the canal, often with a fourth using a total station. Points across the canal from bulkhead to bulkhead were taken with a long prism pole, handing the pole off to the crew member on the other side after each crossing. The dynamics of which residents’ boats might be at the docks on any given day made full autonomy for that phase of the surveys impractical.
Coastal Geomatics’ solution was to employ a peddle-powered kayak, guiding the Apache remotely. The flexibility of their new craft has enabled the firm to execute multiple types of surveys and expand their hydrographic services more efficiently.
Fugro’s Blue Prism USV will have greater endurance, improved weather resilience and ultra-low carbon emissions. (Image: Fugro)
Fugro has signed a contract with Kooiman Engineering and Van Oossanen Naval Architects for the naval design of Blue Prism, Fugro’s next generation of unmanned surface vessels (USVs).
Engineered for both coastal and offshore operations, the Blue Prism will combine an ultra-low carbon footprint with high-quality data collection, weather resilience and endurance characteristics, Fugro explained in a press release.
Available in 2023, Fugro’s Blue Prism will acquire high-accuracy bathymetry and sub-bottom data using hull-mounted sensors, while also having the ability to tow multiple geophysical sensors. It will also be capable of beyond-visual-line-of-sight operations.
Together with Fugro’s smart data-management software, the speed and endurance of the Blue Prism will reduce risk and accelerate project delivery in offshore wind, hydrographic charting and coastal resilience.
“To re-think the design and layout of a vessel without a crew is a dream come true for a naval architect,” said Perry van Oossanen, managing director and naval architect at Van Oossanen Naval Architects. “We are thrilled to be part of this exciting project in which the best techniques in Dutch ship building are combined in this new uncrewed ultra-efficient vessel.”
“The collaboration between Kooiman and Van Oossanen has already led to innovative solutions, and we are pleased to be able to help Fugro take the next step in uncrewed vessels,” said Maarten Kooiman, director of Kooiman Engineering.