The AsteRx EB offers high-accuracy positioning and GNSS heading for industrial robots, port logistics, marine and scalable automation applications. Its IP67 enclosure protects the receiver from harsh weather conditions, while built-in advanced GNSS+ algorithms ensure reliable operation in environments challenging for GNSS, such as areas with foliage or near GNSS interference sources. The RAIM+ integrity monitoring system ensures truthful positioning — essential for autonomous navigation. The compact enclosure of AsteRx EB enables easy installation, reducing time-to-market. In a dual-antenna configuration, AsteRx EB delivers sub-degree GNSS heading for systems that require orientation in addition to RTK positioning. The built-in AIM+ anti-jamming and anti-spoofing technology protects the receiver from intentional or unintentional GNSS interference.
The Facet FP is a high-precision GNSS receiver designed to deliver centimeter-level accuracy with a focus on long-term flexibility, ease of use and open-source innovation. It combines multi-band, multi-constellation GNSS support with fully open-source firmware — the platform can adapt as technologies advance. Built to last, all models are contained in a robust waterproof cast-aluminum housing, with an internal structure designed for compatibility with the company’s Flex system of GNSS modules. This gives users the choice between three different modules, plus the choice of having tilt-compensation, offering six different options with a range of price points, securities and accuracies for various needs and applications.
The A65 GNSS antenna delivers exceptional accuracy, interference protection and robust GNSS tracking performance. Designed as a drop-in replacement for the widely deployed A45 antenna, the A65 offers users a seamless upgrade path to the latest precision technology. The industry collaboration reflects a shared focus on combining advanced RF design with real-world application insight to address increasingly complex GNSS operating environments, with both teams working closely from the earliest stages of development to meet demanding original equipment manufacturer (OEM) performance requirements. The antenna architecture, including the stacked patch quad feed element and RF front end, provides Calian’s XF Filtering. Hemisphere GNSS contributed application expertise, system integration requirements and performance validation within real-world machine control, agriculture, marine and survey environments.
Airborne Lidar
Long-range for UAV mapping and aerial surveillance
AlphaAir 6 is mounted on the X500 UAV during an urban mapping mission. (Credit: CHC Navgation)
The AlphaAir 6 airborne lidar system is designed for UAV-based laser scanning, drone lidar mapping and aerial surveying in high-relief and complex terrain. Combining prism scanning technology with a high-grade inertial navigation system (INS), the AlphaAir 6 delivers a maximum ranging capability of up to 2,100 m and supports efficient data capture at typical flight altitudes of 400 m to 600 m above ground level. It integrates an upgraded laser engine and a high-grade IMU with 0.3°/h bias stability to improve trajectory accuracy and point cloud quality. This design removes the need for pre-mission IMU calibration and supports stable, efficient data collection for topographic mapping, corridor mapping, and wide-area aerial survey workflows. It is available in single-camera and dual-camera configurations.
The FastXY mapping application for iOS and Android enables standard mobile devices to serve as professional-grade data-collection tools for geospatial information system (GIS) and architecture, engineering and construction (AEC) professionals. FastXY allows users to collect point, line and polygon data with devices they already own. It delivers advanced capabilities including 3D basemaps, construction staking, topographic surveying, on-the-fly datum transformations, and survey-grade elevations. A built-in Bluetooth data parser allows users to configure the app to collect data from any instrument supporting BLE Bluetooth or RS-232 — echosounders, radiation sensors, laser rangefinders, barcode scanners — and marry that data with precise GNSS coordinates.
FastXY can transform standard mobile devices into professional-grade data collection tools for geospatial information systems (GIS) and architecture, engineering and construction (AEC) professionals. FastXY offers professionals the ability to collect point, line and polygon data, and delivers advanced capabilities including 3D basemaps, construction staking, topographic surveying, on-the-fly datum transformations and survey-grade elevations. A built-in Bluetooth data parser allows users to configure the app to collect data from virtually any instrument supporting BLE Bluetooth or RS-232 — including echosounders, radiation sensors, laser rangefinders, barcode scanners and more — and marry that data instantly with precise GNSS coordinates. Available in free and premium versions.
Handheld scanner: Designed for BIM, indoor scanning and reality capture
The RS7 handheld SLAM (simultaneous localization and mapping) scanning solution was built for BIM documentation, indoor surveying, renovation planning and complex spatial analysis. It is designed to help professionals capture high-density 3D data efficiently and convert it into practical deliverables through CHCNAV’s software and cloud ecosystem. The RS7 integrates a next-generation lidar scanner capable of measuring up to 1.15 million points per second. Its wide field of view (360° x 189°) supports comprehensive coverage of floors, walls and ceilings, helping reduce the need for repeated passes and complex capture maneuvers in tight or cluttered spaces. The scanner also includes a high-precision inertial measurement unit with bias stability better than 0.5°/h. By combining lidar and inertial data, the system is designed to maintain stable motion estimation and consistent point-cloud quality in environments that challenge many mobile workflows, including long corridors, repetitive structures, and feature-limited interiors.
Mobile scanner: All-in-one system offers SLAM, LIDAR, RTK and 360 degree imagery
The GX1 is an integrated, highly accurate all-in-one mobile scanning system combining simultaneous localization and mapping (SLAM), lidar, real-time kinematic (RTK) georeferencing, cameras and software. It supports a seamless workflow, from capture to deliverable, and can reduce the time required to survey a site by up to 95%. The independently validated global accuracy of 5 mm to 10 mm delivers the precision needed for topographic and road surveying, scan to building information models, construction progress tracking, and more. These capabilities are supported by integrated RTK georeferencing with real-time quality monitoring, four 20MP cameras for 360° panoramic imagery, and a proven SLAM algorithm. The GX1 has four deployment modes — backpack, survey pole, vehicle mount and supported handheld.
Quad-band GNSS rover: With support for Galileo high accuracy service
The SparkPNT TX2 quad-band GNSS rover combines an IP67-rated aluminum enclosure with support for Galileo’s High Accuracy Service (HAS) and standard RTK correction workflows. The receiver is built around the Quectel LG290P quad-band GNSS engine and supports multi-constellation tracking. Galileo HAS support provides sub-20 cm accuracy globally without subscription-based correction services, while RTK workflows via NTRIP or u-blox PointPerfect can achieve centimeter-level positioning. Battery life is rated at 50-plus hours, positioning the TX2 for multi-day field campaigns without recharging. The unit connects to iOS and Android devices via Bluetooth and WiFi, with compatibility reported for common GIS and data-collection applications. A notable design choice is the open-source firmware, which gives users visibility into how positioning data is processed and allows for customization and third-party integration. SparkFun has positioned this as an alternative to closed GNSS ecosystems where firmware and processing pipelines are not user-accessible.
Mobile
GNSS platform: Provides ultra-low power GNSS for all environments
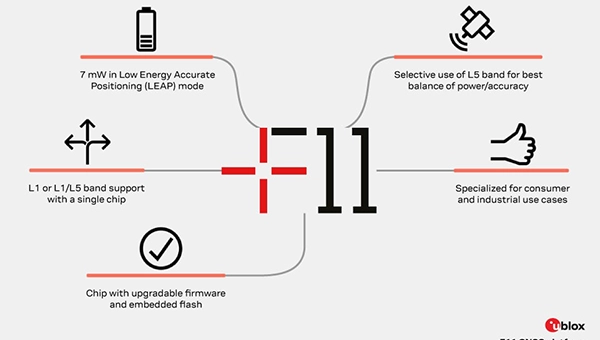
The u-blox F11 platform provides L1/L5 dual-band standardprecision GNSS to improve positioning accuracy while reducing power consumption to as low as 7 mW in typical configurations. It combines ultra-low power operation with intelligent signal management to meet the evolving demands of tracking, wearables, telematics and mobility applications — including micromobility solutions and drones. The platform enables device manufacturers to achieve longer battery life, faster and more reliable position fixes, and greater design flexibility. Its situationally aware GNSS architecture, with integrated geofencing and indoor detections, dynamically balance accuracy and power consumption. By selectively using dual band L1/L5 operation only when it helps maintain positioning performance, the platform reduces energy use while providing resilience and maintaining confidence in location data.
The Iridium 9604 is a compact, threein-one internet of things (IoT) module that integrates Iridium short burst data satellite service, LTE-M cellular connectivity, and GNSS positioning into a single platform. The Iridium 9604 seeks to make dual-mode IoT connectivity viable for price-sensitive, high-volume deployments. Built on the u blox SARA-R5 platform, the module comes in a compact 16 mm x 26 mm x 2.4 mm form factor, suitable for dual-mode IoT deployments across industrial, infrastructure and mobility applications.
L1+L5 GNSS modules: For trackers and high-precision IOT
Two dual-band positioning modules built on Airoha’s AG3335 chipset series are available: the ultracompact SE873K5-D and the high-end SE869eK5-DRK. Both support space- and power-constrained IOT devices and use cases that require continuous, ultraprecise positioning. The modules provide a scalable path to adopt dual-band L1 + L5 GNSS.
Timing
Cesium-less clock: An alternative to cesium-accuracy holdover clocks
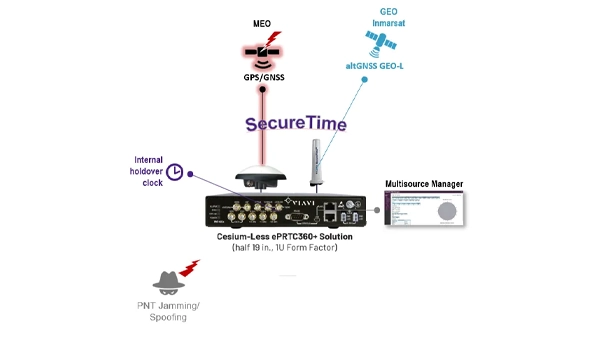
The patent-pending Cesium-less ePRTC360+ holdover solution is designed to safeguard atrisk infrastructure against the increased threat of GNSS timing disruptions. It is the only alternative to Cesium clocks to meet ITU-T G.8272.1 standards. It can protect critical power grids; transportation, aviation and public safety systems; 5G mobile networks; and AI data centers. It meets the international ITU-T G.8272.1 standard and has been successfully tested across a range of livesky defense and commercial jamming/spoofing environments. It has been integrated into VIAVI’s SecurePNT 6200 product series and can maintain 100 ns accuracy during GNSS-denied threats through the resilient altGNSS GEO-L service with no time limit.
The U4930 series is a reliable and cost-effective six-axis microelectromechanical system (MEMS) and inertial measurement unit (IMU) module for navigation, control and measurement of vehicles, ships and drones. Applications include vehicle/ship attitude measurement, UAV attitude reference and trajectory control, mobile mapping, track inspection and underwater highprecision navigation. The U4930 series integrates high-performance MEMS gyroscopes and accelerometers within an independent structure. The three-axis MEMS gyroscopes sense the angular motion of the carrier, and the three-axis MEMS accelerometers sense the linear acceleration of the carrier. The system internally performs compensation for zero bias, scale factor, non-orthogonal error and acceleration-related terms across all temperature parameters, maintaining high measurement accuracy over a long period of time. The module supports custom communication protocols and provides synchronization for GPS/GNSS time data and pulse per second (PPS) signals.
Underground navigation: For navigating mines and unmapped environments
Chimera Land is a 3D laser velocity sensor (LVS) designed to solve the primary challenge for underground mining: maintaining precise vehicle positioning in deep, dark and unmapped environments where GPS cannot reach. When fused with an Advanced Navigation inertial navigation system (INS), Chimera Land allows underground vehicles to maintain stable navigation over extended distances and time. Instead of needing to query an external beacon or satellite for its location, the sensor uses specialized lasers to measure a vehicle’s ground-relative 3D velocity with high accuracy. By feeding this precise data into the vehicle’s INS, the sensor eliminates the drift that typically comes with standalone INS. Using AdNav Intelligence, the result is a resilient, high-performance, infrastructure-light positioning solution that excels in the highdust, zero-light conditions typical of underground mines.
Simulators
GNSS test tool: Provides real-world testing with signals from the field
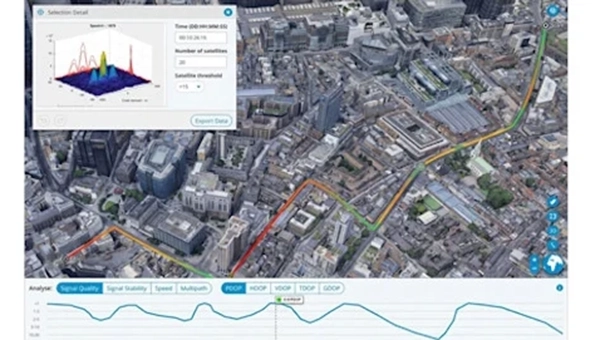
The SimXTRACT GNSS test tool bridges the gap between field and laboratory. It enables signals captured in field environments to be comprehensively decomposed into individual, discrete signals and applied to lab simulation for realism at every stage of the development test cycle. Developers usually rely on either RF record-and-playback or lab simulation for testing and validation of PNT systems and devices. SimXTRACT takes real signals captured in field environments and performs complex signal decomposition, breaking down each received signal into discrete line-of-sight and multipath ray paths, along with metadata such as Doppler offset, code error, power level and angle of arrival. This decomposed environment is then automatically converted into fully controllable simulation scenarios for Spirent GNSS simulators.
Autonomous
Inertial measurement unit: For unmanned air, land and sea
Honeywell launched the HGuide i700, an inertial measurement unit (IMU) that delivers high-accuracy performance for unmanned air, land and sea vehicles. By pairing near navigation-grade capability with a nolicense-required (NLR) classification, the HGuide i700 provides integrators worldwide with a new option for critical sensing and navigation. The HGuide i700 uses high reliability sensors and electronic architecture found in Honeywell’s HG3900 inertial measurement unit (IMU). Compact and low power, the HGuide i700 delivers near-navigationgrade accuracy and reliability while being optimized to support longer range navigation in GNSS-denied environments. The HGuide i700 offers strong GNSS-denied performance for by limiting maximum acceleration and spin rates in a license-free package. The latest in Honeywell’s HGuide suite of no-license inertial solutions, the HGuide i700 allows customers to streamline development cycles, simplify system architecture and transition to field deployment quickly. The HGuide i700’s rugged design, compact size and low-power profile make it suitable for diverse commercial, industrial and defense applications, including autonomous vehicles, mapping and surveying.
Anti-jam antenna system: Provides multi-constellation, multi-frequency GNSS signal protection
The GAJT-AE3 protects all major GNSS constellations from jamming with full multiconstellation, multi-frequency coverage, ensuring reliable PNT in demanding airborne environments. Its antenna electronics mitigate interference by creating up to seven nulls per band in the direction of jammers, providing significant anti-jam protection even in dynamic multi-jammer scenarios. The output is a protected radio frequency signal, free from jamming and suitable for input to modern and legacy GNSS receivers. The GAJT-AE3 protects and supports all GNSS frequencies, including L-band corrections and Iridium PNT.
OEM
GNSS board: All-band multifrequency reception and HAS-ready
Syslogic’s new all-band GNSS expansion board for rugged embedded computers is powered by the u-blox X20 receiver. It supports all major GNSS constellations and frequencies, including L1, L2, L5, L6 and L-band, and enables the use of the Galileo High Accuracy Service (HAS). It provides centimeter-level positioning, opening up new applications across industries such as autonomous field management, operation of construction machinery in remote areas, or navigation of automated guided vehicles and autonomous mobile robots. The GNSS board is designed for worldwide use. The integrated u-blox receiver supports modern correction techniques such as RTK, PPP-RTK and PPP. For the first time, it has been fully optimized for PointPerfect Global, u-blox’s proprietary high-precision GNSS correction service, delivering centimeter-level positioning anywhere in the world. This is particularly useful in remote areas without cellular coverage.
GNSS L1/L5 breakout: For meter-level positioning in embedded applications
The SparkFun GNSS L1/L5 Breakout – NEO-F10N (SMA) is a compact GNSS module designed for meter-level positioning accuracy in embedded applications. It uses dual-frequency L1 and L5 bands, with the L5 signal offering improved performance in urban environments due to reduced RF interference within the protected ARNS spectrum.
The board supports concurrent reception of GPS, Galileo and BeiDou, and uses u blox dual-band multipath mitigation to enhance accuracy in challenging conditions. It features a single UART interface, with an onboard CH340 USB-to-serial converter for easy connection to a computer, and standard pin headers for integration with external systems.
The module includes an SMA connector for secure antenna attachment and is configurable using u-blox u-center software.
CHC Navigation (CHCNAV) has released the AlphaAir 6, a flagship airborne lidar system designed for UAV-based laser scanning, drone lidar mapping, and aerial surveying in high-relief and complex terrain.
Combining prism scanning technology with a high-grade inertial navigation system (INS), the AlphaAir 6 delivers a maximum ranging capability of up to 2,100 meters and supports efficient data capture at typical flight altitudes of 400 to 600 meters above ground level.
The AlphaAir 6 integrates an upgraded laser engine and a high-grade IMU with 0.3°/h bias stability to improve trajectory accuracy and point cloud quality. This design removes the need for pre-mission IMU calibration and supports stable, efficient data collection for topographic mapping, corridor mapping, and wide-area aerial survey workflows.
The AlphaAir 6 combines fifth-generation real-time waveform processing with advanced multi-period technology to capture richer, denser, and more precise lidar data across complex terrain, vegetation, and built environments. According to CHCNAV, even at an ultra-high pulse repetition rate of 2,000,000 pulses per second, it continues to support real-time point cloud output, giving operators immediate in-flight visibility and a faster path to survey-grade 3D results.
To meet different project requirements, the AlphaAir 6 is available in single-camera and dual-camera configurations. Both options use large-format CMOS sensors to deliver high-resolution imagery, while the dual-camera version adds an ultra-wide field of view to improve image coverage and increase mapping efficiency.
With an integrated design and a weight of 1.35 kg, the AlphaAir 6 reduces payload burden on UAV platforms and helps extend flight endurance. Open interface protocols support integration with mainstream multirotor and fixed-wing UAVs, giving surveying and mapping professionals more flexibility across different mission types.
CHC Navigation has announced major updates to its i93, i85 and i76 GNSS receivers, as well as the iBase professional base station. The updates are designed to further improve positioning stability, simplify field setup, and expand operational capability across demanding surveying environments.
Enhanced RTK performance with the CHCNAV StellaX GNSS chip The updated i93, i85 and i76 receivers integrate the CHCNAV StellaX GNSS chip with multi frequency signal tracking and advanced anti interference mitigation. This design is intended to support more reliable GNSS RTK positioning and more consistent data collection in complex terrain and in areas with partial GNSS satellite visibility.
PointSky GNSS corrections service for remote surveying To reduce reliance on cellular networks and local radio links, the updated i93 and i85 now include a one-year standard subscription to the CHCNAV PointSky service. PointSky delivers GNSS corrections via satellite, enabling users to reach a 2.5 cm precision fix in three to five minutes. This capability supports surveying operations in remote locations such as mountains, forests and deserts where network coverage can be limited or unavailable.
Longer range radio operation and simplified iBase startup The iBase base station now integrates CHCNAV DistLink technology and improved data compression to increase radio sensitivity and support up to 30 km coverage for linear projects such as highways and railways. Power consumption has also been optimized to support more than 13 hours of continuous operation without external batteries. To streamline setup, iBase includes a one button startup sequence designed to automatically pair with rover units, reducing the need for manual parameter configuration in the field.
Designed for BIM, indoor surveying and reality capture
CHC Navigation announced the RS7, a new handheld SLAM (simultaneous localization and mapping) scanning solution, unveiled at the 2026 CHCNAV Connect Partner Conference.
Built for BIM documentation, indoor surveying, renovation planning and complex spatial analysis, the CHCNAV RS7 is designed to help professionals capture high density 3D data efficiently and convert it into practical deliverables through CHCNAV’s software and cloud ecosystem.
“Customers no longer evaluate hardware in isolation. They expect an end-to-end solution that shortens the path from 3D data capture to deliverables,” said Byron Yuan, senior vice president of CHCNAV. “CHCNAV RS7 combines high performance mobile scanning with an integrated workflow to support efficient operation in complex indoor environments.”
High-density capture with multi-sensor fusion
CHCNAV RS7 integrates a next generation lidar scanner capable of measuring up to 1.15 million points per second. Its wide field of view (360° x 189°) supports comprehensive coverage of floors, walls and ceilings, helping reduce the need for repeated passes and complex capture maneuvers in tight or cluttered spaces.
RS7 also includes a high-precision inertial measurement unit with bias stability better than 0.5°/h. By combining lidar and inertial data, the system is designed to maintain stable motion estimation and consistent point-cloud quality in environments that challenge many mobile workflows, including long corridors, repetitive structures, and feature limited interiors.
Integrated field-to-office workflow with cloud processing
RS7 is supported by CHCNAV software ecosystem that covers scan setup, data review, and post processing. With integration to CHCNAV CoCloud, teams can adopt a “Cloud + Terminal” workflow for centralized management of projects and data. Field datasets can be uploaded for automated processing to generate common deliverables such as registered point clouds and mesh models.
By automating key processing steps, the workflow can reduce turnaround time and lower the technical threshold required to convert raw capture into outputs suitable for design review, documentation, and downstream CAD or BIM tasks.
High-fidelity visualization with 3D gaussian splatting outputs
Beyond geometric data, CHCNAV RS7 is designed to support realistic visualization for communication and review. It features dual 12-megapixel cameras optimized for low light capture. Using the CHCNAV HPGS 2.0 engine, the workflow supports 3D gaussian splatting (3DGS) outputs that deliver photorealistic scene rendering while retaining spatial context. These outputs can help stakeholders understand conditions on site, support progress tracking, and improve collaboration across surveying, engineering, and construction teams.
CHC Navigation (CHCNAV) has released the Apache 6–2026 Edition, an integrated unmanned surface vessel (USV) designed for high-resolution bathymetric and 3D mapping applications. Built to accommodate NORBIT multibeam echosounders, the Apache 6 delivers a comprehensive solution for underwater surveying, object positioning, and offshore construction support in varying aquatic conditions.
The Apache 6 – 2026 Edition is optimized for seamless integration with the NORBIT iWBMS and WINGHEAD series of multibeam echosounders. An optional NORBIT iLiDAR can also be integrated, allowing for the simultaneous collection of marine and terrestrial 3D data in a single pass. This capability is particularly efficient for projects that require mapping both underwater topography and overhead structures, such as bridges and power lines, making it a comprehensive tool for harbor, river and infrastructure surveys.
Automated Sound Velocity Profiling Accurate sound velocity measurement is fundamental to high-quality bathymetric data. The Apache 6 – 2026 Edition addresses this with an optional automated sound velocity profiler (SVP) kit. This system can be controlled directly from the remote controller, allowing the operator to perform SVP casts on-demand without interrupting the survey workflow. The kit is designed for rapid deployment — attachable or detachable in under a minute — ensuring that the multibeam echosounder data is continuously corrected with the most accurate sound speed information, which is critical for meeting stringent survey specifications.
The USV combines a detachable triple-hull vessel design with smart rotating propeller technology to deliver both stability and agility in varied conditions. The robust hull configuration ensures reliable performance in strong currents, while removable side floats enable safe operations in shallow waters. Intelligent propeller control adjusts water flow direction to achieve a turning radius of approximately two meters, supporting effective navigation in confined or winding channels.
Android-Based Control Survey operations are streamlined through an intelligent Android remote controller, which provides real-time access to vessel status and data without the need for a separate field computer.
The interface allows for straightforward management of the survey workflow, while a multi-link communication system ensures reliable data transmission over long distances. This setup enables surveyors to maintain seamless control over the Apache 6 and monitor mission progress effectively from the shore.
CHC Navigation announced at CES 2026 that MOVA has integrated CHCNAV PointX integrated satellite ground service and the StellaX high-precision positioning chip into its NAVAX 5000 AWD intelligent robotic lawn mower, unveiled at the show in Las Vegas last week.
The integrated positioning solution is designed to support centimeter-level accuracy for wire-free mowing, without requiring users to install a local RTK base station or subscribe to cellular data plans.
Wire-free robotic mowers are accelerating adoption of virtual boundaries and automated coverage. Many systems rely on local RTK reference stations, network RTK, or cloud connectivity, which can increase installation complexity and introduce ongoing service costs. CHCNAV and MOVA developed a positioning architecture designed to address these limitations through satellite delivered corrections combined with onboard sensor fusion.
Wire-free mowing without local base stations
NAVAX 5000 AWD uses CHCNAV PointX integrated satellite ground service to deliver GNSS enhancement signals via satellite. With the StellaX high-precision positioning chip, the mower can achieve centimeter-level positioning across supported regions without requiring users to deploy and maintain an RTK base station at home. This can reduce setup time, remove routine base station maintenance, and avoid recurring cellular data fees for positioning corrections.
Residential yards often include trees, walls, fences and buildings that degrade satellite visibility and create multipath effects. NAVAX 5000 AWD combines satellite-based RTK positioning with binocular vision and lidar to strengthen navigation performance in these environments.
With PointX and StellaX, the system is designed to deliver stable positioning and consistent path tracking in obstructed areas where traditional GPS RTK-only approaches can be difficult to sustain.
PointX-integrated satellite ground services support rapid RTK initialization to reduce waiting time at startup. This enables power on and go operation for typical mowing sessions and supports repeated runs with minimal user intervention.
JAVAD Data Collector (JDC) is designed to run seamlessly on any Android device and interface seamlessly with JAVAD GNSS smart antennas. JDC features simple, intuitive workflows that require minimal training, making it accessible for users of all skill levels.
The software includes a Signal Bar for a quick view of receiver status, ensuring users can easily monitor their equipment’s performance. Its easy navigation allows users to move through the software efficiently. It is designed to streamline operations of customers ranging from individual surveyors to large surveying firms, making it easier to deploy and manage receivers across teams of any size with minimal training. JDC is available for download through the company website.
The AU20 MMS is a vehicle-mounted mobile mapping system designed for accurate and efficient collection of 3D spatial data. It combines high-performance lidar technology, versatile sensor support and intelligent data processing to provide a practical and flexible solution for professionals in road surveying, asset management and infrastructure documentation. Its lidar system uses fourth-generation real-time waveform processing to achieve a scan rate of 2 million points per second and 200 revolutions per second, producing point cloud data with 5 mm accuracy and 3 mm precision. This level of detail allows for the identification of fine surface characteristics and features, supporting comprehensive asset inventories and condition assessments. The system’s long-range, multi-cycle laser technology enables high-density data capture up to 250 m in vehicle-mounted applications.
CHC Navigation (CHCNAV) has released the AU20 MMS, a vehicle-mounted mobile mapping system designed for accurate and efficient collection of 3D spatial data. The system combines high-performance lidar technology, versatile sensor support and intelligent data processing to provide a practical and flexible solution for professionals in road surveying, asset management and infrastructure documentation.
The AU20 MMS features a sophisticated lidar system that uses fourth-generation real-time waveform processing technology. It achieves a scan rate of 2 million points per second and 200 revolutions per second, producing point cloud data with 5 mm accuracy and 3 mm precision. This level of detail allows for the identification of fine surface characteristics and features, supporting comprehensive asset inventories and condition assessments. The system’s long-range, multi-cycle laser technology enables high-density data capture up to 250 m in vehicle-mounted applications.
Built on the adaptable AP7 vehicle platform, the AU20 MMS supports a dual laser scanner setup to increase data density. The platform includes a 45° scanning angle to reduce data shadows and improve detection of vertical structures and road signage. The AP7’s built-in processor allows integration of up to eight external sensors, including specialized pavement detection cameras and panoramic cameras such as the Ladybug5+ and Ladybug6, giving users flexibility in data acquisition strategies.
The AU20 MMS uses artificial intelligence-based algorithms to refine data quality and streamline processing. AI-driven vehicle motion trajectory adjustment automatically identifies control points, correcting point cloud inaccuracies to within two centimeters to meet highway-grade survey requirements. AI-powered panoramic coloring achieves more than 95 percent accuracy in recognizing and handling vehicles and pedestrians, resulting in clean, interference-minimized colorized point clouds with efficient one-click optimization.
CHCNAV’s software suite, CoPre and CoProcess, streamlines workflows through intelligent automation. CoPre optimizes data preprocessing, allowing real-time adjustments to point clouds and imagery while minimizing manual intervention. CoProcess uses AI algorithms for feature extraction, including road assets, terrain models and building structures, to accelerate project delivery.
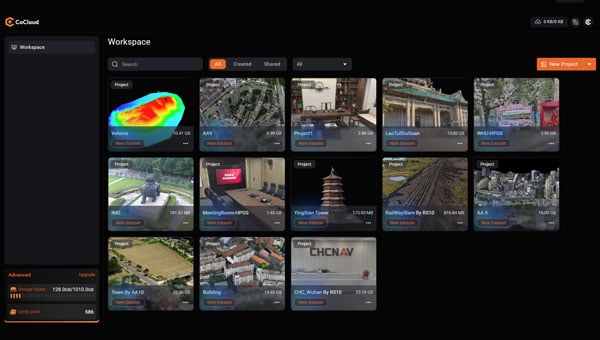
CHC Navigation (CHCNAV) has introduced CoCloud, a cloud-native platform developed for 3D data processing, management and collaborative analysis. The platform is designed to handle multi-source 3D data and supports streamlined workflows from data acquisition to deliverable creation, eliminating the need for local hardware investment.
CoCloud incorporates an advanced photogrammetry engine capable of efficiently processing data from sources such as aerial imagery and lidar scans. The platform produces digital orthophotos, point clouds and OSGB models with a high level of precision suitable for professional applications.
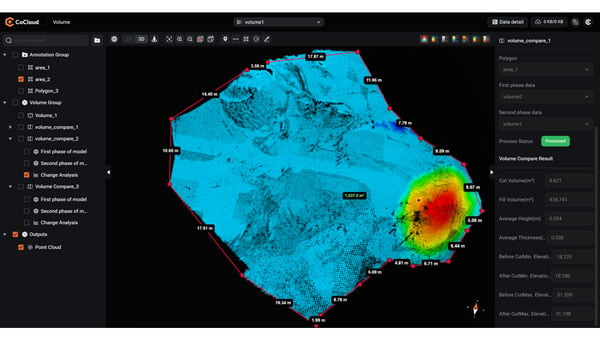
The platform offers tools for online data visualization, sharing and real-time collaboration on tasks such as volume calculations and point cloud editing. Its interface is designed to be intuitive and user-friendly, so users can perform complex 3D data operations without requiring extensive specialized training. CoCloud supports a range of data formats and includes features for dataset and timeline management.
Photo: CHCNAV
The platform offers API access and private deployment options, which allows organizations to integrate the platform into existing systems and customize workflows, from initial data collection through to final application delivery, according to their operational needs.
The platform uses distributed data centers located in Germany and Ireland for localized storage and processing. Both facilities comply with the European Union’s General Data Protection Regulation for reliable data protection throughout collection, transmission and storage.
CHC Navigation (CHCNAV) has introduced the X500 rotor UAV, designed for precision aerial operations. It is ideal for surveying, urban monitoring, emergency response, disaster relief and infrastructure inspection.
Equipped with advanced navigation and safety features, the X500 rotor UAV meets the demands of professional operations. Dual GNSS and triple inertial measurement unit redundancy enhance positional accuracy and reliability, whereas integrated millimeter-wave radar provides precise obstacle detection. The drone’s video transmission system supports HD feeds over distances of up to 20 km, and its V-SLAM visual positioning ensures accuracy for tasks such as landing on moving platforms.
The X500 is designed to handle diverse payloads, with a capacity of up to 5 kg and flight durations of up to 58 minutes — or 50 minutes when equipped with the CHCNAV AA10 lidar system. Its open SDK and compatibility with the Mavlink protocol allows for seamless integration with both CHCNAV sensors and third-party equipment. Built for demanding conditions, the X500 features an IP55 rating and can operate in winds up to 12m/s.
The UAV features a new power system, enabling up to 58 minutes of flight time. According to CHCNAV, the BS10 charging station minimizes downtime by charging six batteries from 20% to 90% in just 40 minutes, while hot-swappable batteries ensure uninterrupted operations during extended missions.
Complementing the X500’s hardware is CHCNAV’s SmartGo ground control software, which simplifies mission planning and offers real-time flight monitoring. With various flight path options and beyond visual line of sight capabilities, SmartGo ensures safe, efficient operations while providing full control over mission parameters.
All construction work begins with surveying to map the site and generally ends with surveying to document what was done on it — called “as built.” Therefore, surveyors are the first to arrive at a construction site, well before the first heavy machinery, and the last ones to leave, well after the construction crews have left with their equipment. During construction, surveyors get to work any time there are changes in the plans.
Surveyors are not the only ones to use survey-grade GNSS receivers on a construction site, though. GNSS for machine control is increasingly common on excavators, graders, dozers and other heavy machinery. It enables operators to achieve accurate earthmoving and grading operations with minimal manual intervention, significantly improving efficiency and reducing rework by providing real-time positioning data based on 3D design models. Additionally, a dedicated display in the cab allows operators to see a visual representation of the machine’s position relative to the design model and to make adjustments in real-time.
This month’s cover story features case studies from four companies:
CHC Navigation (CHCNAV) on grading for an airport construction project in Shanghai, China.
ComNav Technology on a river flow monitoring system to mitigate the effects of flooding in Japan.
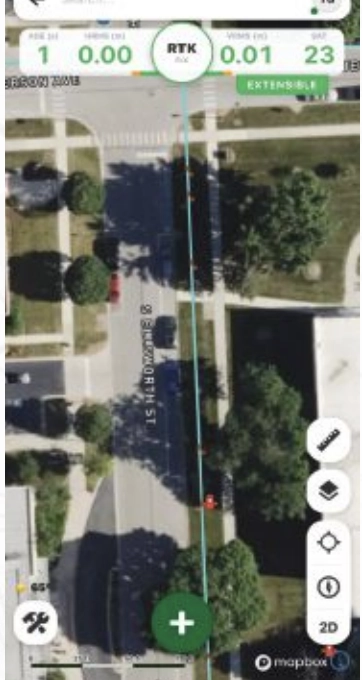
Nearmap on solving the stormwater challenges of a small town in Michigan.
Frontier Precision on the repair of a canal in Montana in very challenging conditions.
Construction of a building cannot begin until the ground is level and matches the design so that it can bear the weight of the planned structure. At times, part of the ground needs to be sloped to ensure proper drainage or to meet the aesthetic needs of the project. However, the ground at a construction site is often uneven and/or sloped the wrong way. Therefore, a critical phase of any AEC project is grading, which is a specialized phase of the construction process that uses machinery such as graders, bulldozers, excavators, and dump trucks to move and shape large amounts of earth.
Traditionally, grading involved the use of string lines and optical levels, which are still valuable for smaller projects. These tools provide a visual reference for achieving the desired slope and allow for manual adjustments as needed. Modern construction practices rely on laser levels — which provide accurate measurements, ensuring a consistent slope — and, increasingly, on GNSS receivers, which aid in precise grading, especially in large-scale projects.
In a recent project to build an apron — a paved area where aircraft are parked, loaded, unloaded, refueled and boarded, also known as the ramp, flight line or tarmac — as part of the expansion of Shanghai Pudong International Airport, the construction company adopted CHCNAV’s i93 GNSS receiver solution. The project, by a large state-owned construction company, began at the end of July 2024 and is expected to take two years to complete. By directly loading the designed triangulated terrain model (TTM) for surface stakeout, the project managers were able to visualize the cut-and-fill values at any location in real time. This approach doubled the stakeout efficiency and significantly improved the quality of site grading.
Project challenges and solution
The airport project covered approximately 360,000 m², demanding high-precision grading. Traditional surveying methods could only verify cut-and-fill heights at grid nodes, failing to effectively cover areas between these nodes. This limitation increased the risk of uneven construction and restricted the comprehensiveness of elevation data. Additionally, the traditional stakeout process was cumbersome and inefficient, requiring point selection before stakeout. To overcome these challenges, the construction team needed a surveying solution that could significantly enhance stakeout efficiency while improving grading precision and construction outcomes.
The construction team used the CHCNAV i93 GNSS receiver and LandStar field survey APP. By using the surface stakeout function for site grading, it was able to load the TTM generated from design data directly into the LandStar software, simplifying the grading process. The software enabled surveyors to obtain cut-and-fill values at any location in real time, thereby eliminating reliance on grid nodes and enabling dynamic verification across the entire site for higher grading precision. Lastly, the solution doubled the stakeout efficiency by reducing the steps of selecting feature points before stakeout.
Using CHCNAV’s Satellite Wide Area System (SWAS) corrections network, a global system that offers users fast and precise centimeter-level positioning services, the surveyor was able to achieve an elevation accuracy of -3 cm ~ +2 cm. SWAS covers most of the inhabited areas in China and is expanding its network globally. CHCNav’s satellite Precise Point Positioning service is being developed and tested; it will become part of the SWAS service in the future. The surveyor guides the site grading by comparing the difference between the elevation in the design plans and the measured elevation. Therefore, when the site grading is complete, it should match the design plans.
Conclusions
“The project involves large areas of earth excavation and levelling,” said Yang, the chief of the survey team. “In the past, we had to stake out all the points of the grid after getting the design drawings, and then calculate the elevation difference of each point. If there were some special points, we also had to calculate their positions in the grid. Now, in LandStar 8, we can directly convert the grid drawing into a TTM file and stakeout, which makes it easy for us to set the elevation difference at any point without the limitation of the grid. This increased efficiency accelerated the progress of the project and reduced our workload.”
The adoption of CHCNAV’s surveying and construction solution significantly accelerated the project’s site grading work. This task, which traditionally would have taken about one month to complete, was fully accomplished in just half a month. During the project acceptance phase, the results met all design requirements and passed inspection smoothly. The construction unit reported that the CHCNAV i93 GNSS receiver and LandStar field survey APP greatly enhanced the efficiency and accuracy of the site grading portion of the construction project.
It is essential to take effective measures to mitigate the effects of natural disasters — such as earthquakes or hurricanes — and to prevent them when possible, such as sometimes with floods. This involves multiple aspects, including the development and rehearsal of emergency plans, the construction and reinforcement of infrastructure, and the monitoring of environmental changes. By identifying potential disaster risks and taking preventive actions, the damage caused by these disasters can be significantly reduced and the resilience of communities and cities can be enhanced, thus better preparing for future catastrophes.
How can these disaster mitigation and prevention measures be specifically implemented? First, by creating detailed emergency plans and conducting regular drills, which ensures a quick and effective response during critical situations. Second, by reinforcing critical infrastructure, such as protective embankments and resilient systems, which strengthens the overall preparedness of both urban and rural areas. Moreover, monitoring environmental changes plays a pivotal role in prevention efforts. Real-time observation systems, including advanced sensors and data integration platforms, enable the early detection of potential risks. This facilitates timely preventive actions, minimizing losses with optimal efficiency and resource utilization.
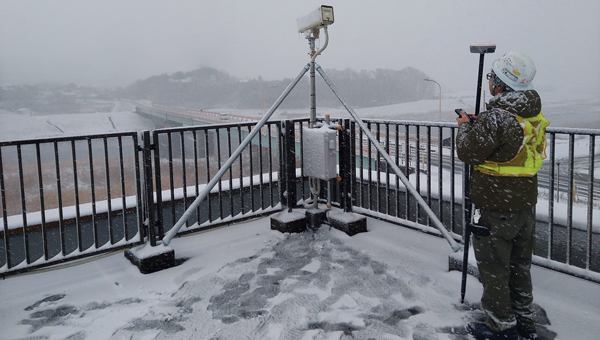
Mars Pro Laser RTK was used to precisely measure the positions of monitoring cameras in the Abukuma River basin.(Photo: Geosurf Corporation)
Monitoring systems
A key aspect of flood defense and disaster prevention is the establishment of monitoring systems and the enhancement of safety measures. In the Abukuma River basin, which flows through Fukushima and Miyagi prefectures in Japan, a flood monitoring system has been built that combines data from water level meters with real-time information on changes in water levels due to natural events such as typhoons. This provides residents with immediate visual updates to help them respond effectively.
ComNav Technology’s Mars Pro Laser RTK has played an important role in this flood prevention and disaster monitoring project. By using the device, which integrates advanced GNSS, IMU, and laser technologies, a team from Geosurf Corporation was able to accurately determine the locations for installing surveillance cameras, ensuring real-time monitoring of water flow conditions, and providing early warnings for natural disasters such as floods. The locations of these cameras typically include areas with a high risk of riverbank collapse, water level observation stations, and other critical spots that require close monitoring.
In the past, this task would have required using a total station. However, using Mars Pro’s very precise green laser, the crews were able to measure the locations of offset points that did not have a clear view of the sky, which is required to receive GNSS signals.
Centimeter-level accuracy
The green laser, which is visible in daylight, enabled the crews to achieve centimeter-level accuracy at any point within a range of 10 meters. They were also able to use its 120-degree tilt compensation feature to drive the stakes efficiently closer to the target point without worrying about leveling. During the RTK positioning process, the team used reliable correction information sources and precise post-processing analysis methods, ensuring that the measurement point consistency was maintained within 2 cm to 3 cm, thus ensuring high accuracy and consistency of the measurement results.
Positioning surveillance cameras in the Abukuma River basin required measuring not only their placements but also the reference points within their coverage areas. Beyond its convenience and reliability, the Mars Pro Laser RTK and its paired software, Survey Master, simplified the survey workflow by using wizard functions. Specifically, the procedure is to follow the instructions of the surveillance camera monitor to move onto the centerline and use the program’s Angle Offset Calculator to calculate the coordinates of a reference point at ±90 degrees to the line segment. Survey Master’s simple survey calculation tool eliminates the need to launch a CAD program in the field, making the staking more efficient.
For the correction information in RTK positioning, Geosurf Corporation used ichimil, a high-precision positioning service provided by Softbank. Geosurf also acquired raw data for post-processing at several locations at the same time and analyzed the measurement points using coordinate results from Japan’s Geospatial Information Authority.
The surveyor used Mars Pro Laser RTK and Survey Master software to measure the reference points within coverage areas of surveillance cameras. (Photo: Geosurf Corporation)
Conclusions
The monitoring system combines water level data collected from devices such as water level meters with changes in water levels caused by natural events such as typhoons, providing real-time visual information to residents. This allows them to stay informed about current water levels, identify potential flood risks early, and take appropriate preventive measures, effectively reducing disaster risks and safeguarding lives and property. More than 100 surveillance cameras have been installed so far in the Abukuma River and its associated watershed.
Through this project, Mars Pro Laser RTK not only enhanced emergency response capabilities but also showcased the versatility of laser RTK technology in disaster prevention and mitigation applications. Climate change is increasing the damage caused by typhoons and torrential rains worldwide. As a result, the demand for such monitoring systems is expected to grow. ComNav Technology plans to further improve user experience by integrating laser technology with additional sensors and developing more innovative tools to address future disaster prevention needs.
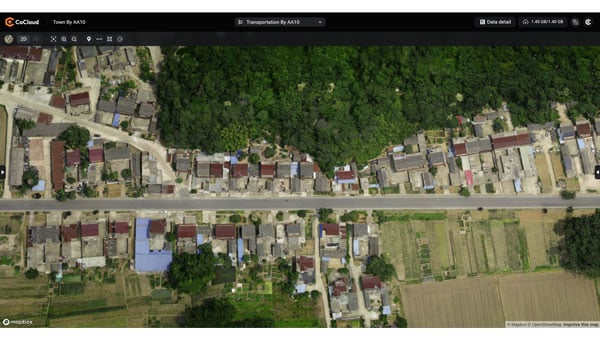
While surveyors are typically the first to begin working on a construction site, but they do not start completely from scratch. As a basemap for their measurements, they often use satellite and aerial imagery, the latter collected by planes and UAVs — the same imagery used in geographic information systems (GIS) by governments at every level and private companies to plan, build, and manage buildings and infrastructure. These data include high-resolution orthimages, which are taken pointing straight down at the ground and adjusted to have a constant scale of distance across them; oblique images, which can offer an alternative view of the landscape and structures where height is important; 3D datasets, including digital elevation models and models of buildings, collected using lidar; and AI-derived spatial information.
Additionally, historical imagery datasets document the evolution of land use over time and make it possible to compare conditions before and after natural disasters, such as floods and earthquakes, to expedite emergency response and reconstruction planning.
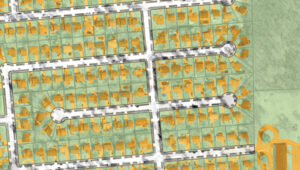
An aerial image of southfield, Michigan, from Nearmap’s natural pervious surface AI data layer. (Photo: Nearmap)
Stormwater utilities project
With a diverse population, more than 10,000 businesses, and a commitment to urban development, the City of Southfield, Michigan is known for its robust economy, thriving commercial centers, modern urban living and innovation. When it needed help to effectively manage its stormwater utilities, the city hired OHM Advisors. Founded in 1962 and with a multidisciplinary team of more than 700 experts, the firm provides consulting in the areas of architecture, engineering, planning, urban design, landscape architecture, surveying, and construction engineering. In turn, for this project, OHM Advisors used location intelligence from Nearmap, an aerial imagery company founded in 2007 that captures urban areas across the United States, Canada, Australia and New Zealand.
Initially, the city planned to have access to the Nearmap imagery for only a year, for use in its stormwater utilities project. However, once it realized how useful it would be across city departments and projects, it decided to continue buying it for the long term.
Aerial imagery
The City of Southfield is currently in the planning stages of considering a new initiative to assess stormwater fees based on the number of impervious surfaces — such as asphalt and concrete — which do not allow water to penetrate the ground, thereby contributing to increased runoff and straining municipal systems. However, the city is challenged by its limited budget for maintaining, let alone upgrading, its stormwater infrastructure. Additionally, the aerial imagery it had was old and one-time flyovers of the small city to update the imagery would have been prohibitively expensive, costing up $100,000.
By purchasing high-resolution aerial imagery (captured up to three times a year), geospatial data, and AI feature layers from Nearmap, as recommended by OHM, the city was able to efficiently map impervious surfaces and readily view, identify, and verify stormwater utilities at scale. This enabled the city to develop a highly accurate and equitable system for assessing fees based on near-real-time data. It also improved the precision and efficiency of its urban planning; enabled city planners to complete tasks remotely, spending less time in the field; and updated the imagery in its GIS.
Business impact
Using current aerial imagery, geospatial data, and AI data, Nearmap and OHM identified every impervious surface in the city, enabling Southfield to:
Accurately assess stormwater fees. Analysis of Nearmap imagery and AI data allowed OHM to tie impervious surface area to stormwater fees and establish a precise, data-backed fee structure that bolsters the city’s infrastructure funding.
Reduce costs. Nearmap offered a cost-effective alternative to traditional data collection, drastically reducing the city’s expenditure without sacrificing data quality.
Enhance urban planning. Access to Nearmap facilitated remote decision-making, allowing Southfield to optimize its urban planning.
Maintain consistent data. OHM and Nearmap led to the resolution of Southfield’s data discrepancies, ensuring reliable insights for future planning.
Conclusions
“Using the high-quality Nearmap AI data allowed the OHM Advisors’ GIS team to efficiently and effectively map out the impervious surfaces for the city,” said Mike Cousins, GISP, practice leader for GIS at OHM Advisors. “Having high-resolution and very recent imagery to pair with the impervious surface data helped with the analysis portion of the project at hand.” The collaboration between OHM Advisors and Nearmap marked a significant change in Southfield’s approach to stormwater management, illustrating the potential of advanced technology to improve urban governance.
The St. Mary Canal and siphon were completed in 1915 as part of the Milk River Project in North-Central Montana. The canal has delivered water to 110,000 acres of agricultural land in eastern Montana for 109 years. In June 2024, the siphon had a catastrophic blowout when both 90-inch siphon pipes failed, releasing 600 ft³ of water per second for more than 24 hours.
The stakeholders involved quickly went to work on a solution to replace the two siphon pipes. By mid-July, NW Construction, Inc. was brought on site to begin demoing and replacing the siphon. The company uses Frontier Precision as its supplier for all its surveying equipment. Utilizing a mix of GPS machine control, geospatial survey equipment, aerial drone surveys and CAD software, NW Construction will work through the blistering Northern Montana winter to restore the siphon in time for the 2025 irrigation season.
The harsh environment and speed of the project pose tough conditions for surveying. Winds regularly reach 60 mph with gusts up to 80 mph and temperatures go well below freezing for most of the winter. The surveyors on this project will have to overcome the challenges that come with this weather and the remoteness of the project.
The project has about six excavators, including two with tilt rotators, and four dozers, all equipped with GNSS machine control. “Everything we do is completely modeled for those guys through civil 3D and Trimble Business Center,” said Kenny Neskorik, project engineer for Northwest Construction. The GNSS receivers on the earth movers are running RTK as rovers and there is a single base receiver. “When we do any sort of concrete work for this project, we will also set up a robotic total station,” he said.
Additionally, the project uses a DJI Mavic UAV to collect aerial photogrammetry of such things as finished excavation and original ground stockpiles.
Requirements
The requirements for this project are atypical, Neskorik explained, due to its emergency nature. “The design and the construction are going on at the same time through two different entities,” he said. “My company is not the engineering firm stamping the plans. We’re the ones doing the work. I
could almost describe it as a design build, in which the contractor and the engineer meet in the middle to get the best product in the fastest way.”
The project’s biggest requirement is to get water back to the eastern part of the state by summer, when it will be needed to irrigate crops. “To do that,” Neskorik said, “we had to set control.” Because the project is only a few miles from the Canadian border, however, the power of radio broadcasts is restricted to only 2 Watts instead of the usual 35 Watts on RTK radios. “That really hurts your range to talk to your base,” he said. This required setting up several relay repeaters, especially since there’s almost no cell phone service in Montana
Challenges
An additional challenge is the solar cycle, which is nearing its peak. “We have noticed lots of Northern Lights, lots of auroras,” said Neskorik, “but we haven’t seen too many disruptions yet.”
Finally, the biggest challenge is the weather. “We’ve already had probably cumulatively two feet of snowfall,” said Neskorik. “Thankfully, some of that has already melted, but this area is one of the colder parts in the United States.” Browning, he pointed out, is just 30 minutes south of us, holds the world record for fastest temperature change in 24 hours — from 56 degrees Fahrenheit to negative 46 degrees. It’s not uncommon to see negative 50 degrees. “At that temperature, your batteries die really fast, you cannot use touch screens, and you have to drill to set stakes in the frozen ground is frozen. We’ve already experienced winds at nearly 80 miles an hour and that is pretty much how it goes for the entire winter. So, as you can imagine, it’s not an easy task flying a drone around here.”
Accuracy
“Our company standard for any excavator or dozer is an accuracy of one tenth of a foot,” said Neskorik. “We want our GPS rovers to have a vertical tolerance below 5/100s of a foot. Realistically, you’re probably getting a 1/10 of a foot. You cannot have any major fluctuations in the dirt because the pipe sits directly on it.” This all must happen in real time because there is no post-processing. “Everything is modeled and the machines are running on a model. We’re checking their grades as they’re doing the work.”