The term “urban canyon” was inspired by New York’s Canyon of Heroes — a stretch of Lower Broadway where tall buildings line the streets similar to a canyoenn. These human-built canyons can confuse GNSS receivers making it hard to accurately calculate a vehicle’s position. For autonomous cars, that’s not just inconvenient — it’s a major safety issue. However, with the right technology, the automotive world can “close’” these urban canyons, explains Manuel Del Castillo, vice president of business development at Focal Point Positioning.
On open roads with a clear view of the sky, satellite navigation can be remarkably accurate. Signals from multiple GNSS constellations reach the vehicle’s receiver unimpeded, helping calculate position with impressive accuracy. However, this often isn’t the case in dense urban areas.
Tall glass buildings, narrow streets, concrete bridges and overpasses all form urban canyons — and can be a barrier to even the most sophisticated navigation systems.
The Challenge
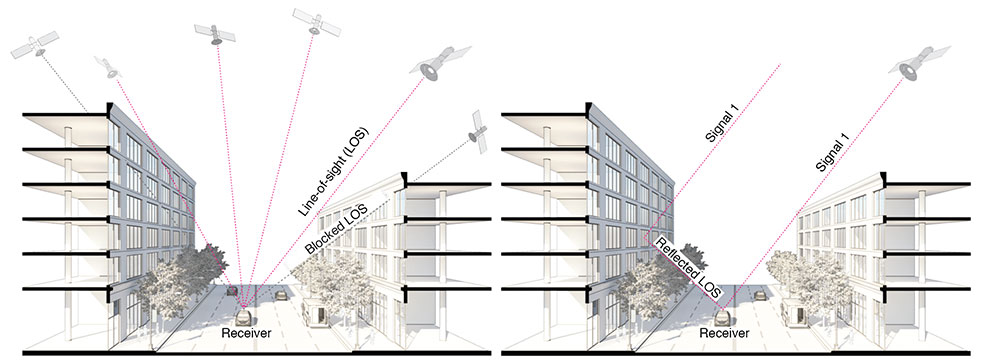
In cities and other urban environments, there are two common challenges for GNSS performance. The first is multipath interference, which occurs when signals bounce off buildings, glass façades and even parked cars before reaching the receiver. Rather than receiving one clean signal from the satellite, the receiver gets a clean signal and several delayed copies, leading to erroneous positioning estimates.
Signal occlusion is another issue, which occurs when tall buildings and structures physically block some satellite signals from view. The signals that are actually received from that satellite are reflections. This makes it difficult for the receiver to lock onto a stable fix.
In practice, both issues can cause sudden anomalies — enough to place a car on the wrong street entirely. For drivers, this is frustrating. For autonomous systems, it’s a safety risk.
The Road to Autonomy
Urban GNSS challenges aren’t new — taxi drivers in London and New York have long experienced their navigation systems getting “lost” among the towers. However, positioning accuracy is now more important than ever as automotive technology evolves and we hand over more control to our vehicles.
Advanced driver assistance systems (ADAS) are now pushing the limits of conventional GNSS. Features such as lane-keeping, automated lane changes and intelligent speed adaptation all rely on knowing the vehicle’s exact position – not just the road it’s on, but which lane.
As we move further towards autonomous driving, the stakes will be even higher. If GNSS references are unreliable, this could cause serious errors on the road. A sudden position jump in the middle of a complex urban manoeuvre is more than inconvenient — it’s dangerous.
Closing the Canyon
If autonomous cars are to drive safely and reliably in urban environments, GNSS must evolve. The answer lies in rethinking how satellite signals are processed — and in tackling the root causes of error. Traditional receivers rely heavily on hardware-based processing, meaning they integrate new technologies at a slow pace.
To help overcome this challenge, we developed S-GNSS Auto — software that enhances GNSS receiver reliability and accuracy in autonomous vehicles. Delivered as a simple firmware upgrade, it transforms GNSS into a more powerful component of the ADAS stack in areas where traditional solutions fall short.
We recently integrated S-GNSS Auto onto STMicroelectronics’ Teseo GNSS devices, and tested the impact of the joint solution in some of the most challenging urban environments: Shinjuku in Tokyo, and Frankfurt and the Black Forest in Germany. The combined solution demonstrated an improvement in measurement accuracy by up to four times and position accuracy by up to three times in the challenging sections of these environments. By ignoring reflected or non-line-of-sight signals, S-GNSS Auto can also reject potential spoofing attacks, enhancing the security of the GNSS receiver.
McKinsey reports that 12% to 20% of cars could have advanced autonomous driving capabilities by 2030. For automakers, this means expanding the roads and environments that can safely support these capabilities. S-GNSS® Auto helps make that possible by improving GNSS reliability and laying the foundation for advanced vehicle-to-everything (V2X) and ADAS technologies needed to support autonomous vehicle safety in challenging urban areas. Working directly from the chip, it provides a cost-effective and accessible way for automotive OEMs to upgrade their technology via a firmware upgrade.
To see the impact of the integrated S-GNSS Auto and Teseo solution, download the latest data from our trials in Japan and Germany here.
This article is contributed by Focal Point Positioning.
Each day, millions of transportation decisions are made without a driver manually choosing a route or reacting to road signs. Trucks are rerouted around traffic hours before a jam appears. A vehicle slows down in a school zone, even without seeing a sign. A delivery service dynamically dispatches drivers based on weather and wait times.
These are not just conveniences; they are outcomes of location intelligence working behind the scenes, powered by artificial intelligence (AI) and real-time mapping.
At the heart of these systems lies a fundamental shift: maps are no longer static guides for humans. AI is unlocking a new era of computing and autonomous systems that will drive industry innovation and reinvention for years to come. Maps have become live, machine-readable software that enables automation at scale. Accenture’s Technology Vision 2025 report found large-language models (LLMs) are giving machines and robots more autonomy in the physical world, allowing them to better understand the physics of their environments, have spatial awareness, interact with people and understand complex instructions. This evolving autonomy is critical for autonomous vehicles, smart logistics and other systems that rely on real-time, AI-powered mapping to sense, decide and act.
Whether it’s advanced driver assistance systems (ADAS), predictive logistics, EV range optimization or smart city operations, AI-powered mapping is fast becoming the connective tissue between sensing, decision-making, and action. It all begins with location data that is collected, interpreted and delivered in real time.
From Navigation to Infrastructure: The Evolution of the Map
Throughout the past two decades, digital maps have evolved from a novelty to a necessity. The early wave of turn-by-turn GPS tools was designed for humans — to get us from one point to another using the shortest or fastest route.
Today, we are witnessing a new paradigm. As autonomy becomes embedded in vehicles, delivery operations, and mobile robotics, we need a new kind of map — one built for machines.
These maps must be able to see, react and even predict. They must be continuously updated with real-time inputs, capable of interpreting events and structured in a way that allows for automation logic. In other words, they must be intelligent; and that intelligence comes from AI.
AI-Powered Maps: What Makes Them Different?
A live, AI-powered map is far more than a digital representation of roads and intersections. It begins with a foundational base layer — detailed information about road geometry, lanes, speed limits, signage and more. However, what sets these maps apart is how they evolve in real-time to reflect the dynamic nature of the world around us.
They incorporate constantly changing inputs like traffic flow, construction activity, road closures and weather conditions — data streams that traditional static maps cannot accommodate. Beyond reacting to real-time events, AI maps also understand context. They may recognize nuances such as school zones that change by time of day, hazardous intersections, low-clearance bridges, and the availability or compatibility of EV chargers at nearby locations.
Crucially, AI-powered maps don’t just describe what’s happening – they anticipate what might happen next. Fueled by billions of data points collected from vehicles, sensors, satellite imagery and crowdsourced sources, these systems use predictive modeling to foresee traffic build-ups, potential hazards or shifts in road accessibility.
The result is a map that doesn’t merely guide but thinks — a constantly updating model of the world designed not for human eyes alone, but for machines that need to make decisions in real-time.
AI fuses these elements, constantly recalculating and enriching the map to reflect what’s happening now and what might happen next.
For this to work, mapping platforms must ingest the billions of data inputs. AI models then validate, filter and extract insight from this data — turning raw input into actionable intelligence and guidance.
Why AI Maps Matter in the Vehicle
Modern vehicles are increasingly defined by software, and that software needs a constant, reliable connection to the outside world.
ADAS features, such as intelligent speed assistance (ISA), lane keeping and predictive cruise control, depend not only on sensors like cameras or radar, but also on high-quality map data to anticipate what’s ahead.
For example, speed limit detection based solely on onboard vision can fail in poor weather or when signs are obscured. But when paired with verified, map-based data, continuously updated by AI, vehicles can make safer, more consistent decisions. As regulators in the EU and beyond mandate ISA systems in new vehicles, AI-enhanced maps are becoming a tool for regulatory compliance, not just convenience.
As OEMs continue their shift toward software-defined vehicles (SDVs), they increasingly treat maps as a core software module, critical to the operation of the vehicle itself, not just a navigation layer.
In the era of SDVs, maps are evolving into a foundational software service used not just to get somewhere, but to determine how and when it is safe to drive.
How AI Maps Support the EV Transition
One of the most significant barriers to widespread EV adoption is range anxiety: the fear that a driver won’t reach a charger in time, or that the charger will be in use or out of order. AI-powered maps help directly address this.
By combining real-time charger availability, plug compatibility, dynamic traffic conditions, topography, and vehicle battery status, intelligent routing systems can not only suggest optimal charging points, but also reroute on the fly as conditions change.
This level of intelligence is essential for EV fleet operators, especially those in logistics, ride-hailing or municipal transit.
AI-powered maps also leverage charger usage patterns, traffic flows and gaps in the network to help cities plan where to place new charging infrastructure.
In this way, location intelligence doesn’t just support EVs on the road but helps accelerate adoption.
Why AI Maps Matter in the Supply Chain
A HERE Technologies ‘On the Move’ survey found only 25% of transportation and logistics professionals are leveraging AI in supply chain management. Yet, the use cases for AI-powered mapping are plentiful.
Fleet operators face daily challenges: delays, emissions targets, labor shortages and delivery windows that shift by the hour. They’re actively seeking technology-based solutions. McKinsey projects the autonomous heavy-duty trucking market could reach an aggregated $616 billion in 2035 in China, the United States and Europe.
AI-powered maps help address many of these challenges. By combining real-time traffic information, road restrictions (e.g., weight limits, low bridges), and predictive analytics, intelligent maps help logistics operators optimize every mile.
For example, dynamic routing can avoid areas of congestion hours before they peak, based on machine learning models trained on historical and live data. AI can prioritize delivery orders based on customer availability, time-of-day restrictions or weather disruptions.
Beyond routing, maps also assist in asset tracking and risk management. Telematics systems that combine GNSS positioning with AI-based location intelligence can detect anomalies in driving behavior, flag out-of-route events and improve operational safety.
The results are evident and tangible: lower fuel consumption, reduced delivery times and higher fleet utilization.
GNSS and Geospatial Foundations
It’s important to underscore that these intelligent maps still depend on foundational technologies like GNSS. Without reliable satellite-based positioning, none of these applications (ADAS, EV routing or predictive logistics) would be possible.
But GNSS alone isn’t enough. Real-time location must be contextualized. An accurate lat/long fix is powerful, but the system needs to know: What road is that on? What’s the speed limit? Are there known hazards? What time of day is it? Is it raining?
This is where geospatial data, fused with AI and layered into live maps, becomes transformational. The future isn’t about replacing GNSS — it’s about expanding what’s possible when GNSS is augmented with AI, context and prediction.
Looking Ahead: Mapping as Mission-Critical Infrastructure
As autonomy increases across industries — from fully autonomous vehicles to self-driving delivery trucks to smart city systems — AI-powered maps will underpin critical operations.
AI-powered maps will be essential to the flow of goods, the safety of passengers and the predictability of city infrastructure. These systems must be continuously updated, machine-readable, context-aware, predictive and scalable. They also must be built with privacy, security and compatibility in mind. Governments, automotive manufacturers, technology providers and mapping platforms will need to collaborate — not just on data collection, but on standards, governance and interoperability.
Quiet Engine of Autonomy
We often focus on the visible outputs of automation: the driverless shuttle, the drone delivery, the smart traffic signal. However, none of these can function without a live map underneath, enabling every decision, in every moment.
Digital maps have become the quiet engine of autonomy. With the power of AI, they’re becoming smarter, faster and more essential every day.
For professionals in GNSS, geospatial intelligence, and positioning systems, this shift opens new territory where location isn’t just about where things are, but also about what’s happening, why it matters and what should happen next.
In this world, AI-powered maps are no longer a tool. They’re infrastructure.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Waymo opens autonomous rides in LA
Photo: Waymo
Waymo has launched its fully autonomous ride-hailing service in Los Angeles, available 24/7, following a waitlist of nearly 300,000 users before its rollout. The service covers nearly 80 square miles of Los Angeles County, including Santa Monica, Hollywood Boulevard and the University of Southern California. Waymo plans to expand its coverage as it scales its operations.
A large UAV show in Quanzhou, Fujian Province, China, ended in disaster when hundreds of UAVs crashed due to GNSS jamming. The event, intended to celebrate the city’s history with 2,000 UAVs equipped with low-altitude fireworks, faced significant disruptions when a camera drone entered the area without notifying authorities, leading them to mistakenly jam the signal. This incident resulted in an estimated loss of more than 10 million yuan ($1.4 million)
ISPRA project unveils coastal habitats of Italy
Photo: ISPRA
The PNRR MER A16-A18 project, led by the Italian Institute for Environmental Protection and Research (ISPRA), has released its first preliminary data for mapping Italian coastal habitats through the WebGIS Virgeo cartographic platform. The project focuses on mapping the growth of the Posidonia oceanica and Cymodocea nodosa meadows, which are crucial for biodiversity. Using high-resolution satellite imagery, lidar sensors and autonomous unmanned vehicles, the project is creating a comprehensive database for marine coastal ecosystem management and protection.
Celestial navigation system for UAVs
Photo: Cpl. Harrison Rakhshani
Researchers at the University of South Australia have developed a celestial navigation system for UAVs. The new system combines visual observations of the stars with standard autopilot technologies. In tests of the system using a fixed-wing UAV, researchers could pinpoint its position within 2.5 miles. This technology can be deployed by UAVs in GPS-compromised or denied areas by eliminating the need for GPS.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Researchers at Drexel University have developed a testing method to enhance the robustness of autonomous driving systems. Their approach uses dynamic visual patterns to evaluate object detection capabilities in self-driving cars, focusing on critical objects such as traffic signs. A “Screen Image Transformation Network” (SIT-Net) simulates real-world image capture scenarios affected by environmental factors. By identifying weaknesses in autonomous vehicle perception systems, the researchers aim to improve safety and reliability in future self-driving technologies.
Robo-dog gets an upgrade
Photo: Boston Dynamics / Leica Geosystem
The Leica BLK ARC autonomous laser scanning module has become the first certified reality capture device capable of being fitted to Boston Dynamics’ robotic dog, Spot. The BLK ARC, when mounted on Spot, is designed for fully autonomous and repeatable scan missions. Users can plan scan paths remotely using existing drawings or BIM models, allowing the robot to navigate and capture data with minimal human intervention. Spot features a 360° vertical and 270° horizontal field of view, with a scan range of up to 25m.
USGS aids recovery after Hurricane Helene
Photo: Logan Combs, USGS
The U.S. Geological Survey (USGS) is actively aiding recovery efforts following Hurricane Helene by collecting flood data, repairing damaged stream gages and analyzing new flood records. The agency has deployed its landslide event team to assess and document landslide impacts, conduct aerial surveys and map affected areas. By collaborating with local, state and federal agencies, the USGS is providing critical data and expertise to support disaster response and recovery efforts.
Antarctic Peninsula turns green
Photo: Tom Roland
Satellite imagery revealed that the Antarctic Peninsula is experiencing a dramatic increase in vegetation, with plant coverage expanding from less than 1 km² in 1986 to nearly 12 km² by 2021. This trend has accelerated significantly, coinciding with extreme heat events and record glacier melting linked to climate change. The study, conducted by researchers from the Universities of Exeter and Hertfordshire and the British Antarctic Survey, indicates that warmer temperatures and increased precipitation create favorable conditions for mosses, which dominate the newly vegetated areas.
Mayor Eric Adams and the New York City Department of Transportation (DOT) Commissioner Ydanis Rodriguez have introduced a new permit program designed to oversee the testing of autonomous vehicles in New York City. The program is part of the city’s initiative to ensure the safe and responsible exploration of autonomous vehicles. With safety as the primary concern, the program mandates that a trained driver must be present behind the wheel of any autonomous vehicle being tested, ready to take control at any moment.
The permit application process requires companies to demonstrate preparedness for testing in New York’s challenging urban environment through detailed plans for technology deployment and safety. This includes showcasing prior testing experience, technological capabilities and comprehensive safety plans detailing how the technology will be safely operated on city streets.
Companies interested in participating in the program must follow industry best practices for the recruitment and training of safety drivers, obtain approval from the New York State Department of Motor Vehicles, and coordinate closely with the city’s emergency services. They must also comply with cybersecurity best practices and provide detailed reports on the automation level and safety performance of their autonomous vehicles and technology.
The United Kingdom’s first fully electric self-driving bus began service on public roads from the Didcot Parkway railway station in June, reported the BBC.
First Bus, the UK’s largest bus operator, said the bus’ radar, lidar and artificial intelligence technology could safely steer, accelerate and brake without human intervention.
While the bus is fully autonomous, it does have a safety driver who is able to override operations if needed.
The 15-seat bus makes a six-mile loop from the station to Milton Park in Oxfordshire, UK, and runs six days a week every 40 minutes.
How Inertial Systems and GNSS Availability Will Help
Innovation Insights with Richard Langley
ARE WE THERE YET? This was a familiar refrain from the backseats of parents’ cars when traveling to a holiday destination or to grandparents when I was growing up. We didn’t have videos on a display attached to the seats in front of us or (who could imagine?) our own personal communication device on which we could call up games, movies or social media channels.
But I’m not talking about that complaint from our childhoods. I’m asking if we have arrived at the era of the self-driving car. The answer is yes and no. It all depends on what you mean by “self-driving.” We reviewed some of the technologies needed for self-driving or autonomous vehicles in this column in June 2019. And we indicated in the introduction to that column that vehicle autonomy has several levels. SAE International, formerly known as the Society of Automotive Engineers, has defined six levels of autonomy that can be briefly described as Level 0 – no automation; Level 1 – hands on/shared control; Level 2 – hands off; Level 3 – eyes off; Level 4 – mind off; and Level 5 – steering wheel optional.
Already, Level 1 automation is widely available in modern cars with adaptive cruise control, parking assistance, lane-keeping assistance and automatic emergency braking among the features being offered. Level 2 automation, where the automated system takes full control of the vehicle’s acceleration, braking and steering, is available in some production models, although the “hands-off” designation is not to be taken literally — most motor vehicle laws require drivers to keep their hands on the steering wheel. Between Level 2 and Level 3, we have conditional automation — the car can drive itself, but the driver must stay alert and be prepared to take over immediately. Level 3 is high automation, where a computer fully drives the car at certain times on certain routes such as a highway; while the driver can perform other tasks such as reading a book, they must be prepared to take over operation of the vehicle within a few seconds if alerted by the automated system. While test campaigns are still ongoing, some jurisdictions permit Level 3 operation by ordinary drivers on some roads, and customers will soon be able to buy vehicles with this level of automation. Widespread use of Level 4 and Level 5 automation is further off (some would say quite a way off) and remains in development. But famously, last year, Toyota operated Level 4 self-driving shuttle vehicles around the Tokyo 2020 Olympic Village.
A lot more work needs to be done before we will have arrived at the era of the fully self-driving car that will be able to travel on any road, anywhere in the world, all year around, in all weather conditions. In particular, self-driving cars in urban environments (as opposed to highway driving) can be problematic. The required multi-sensor automated systems will include GNSS, but buildings block and reflect GNSS signals, reducing system availability and accuracy. In “Innovation” this month, researchers from the Illinois Institute of Technology report on how inertial navigation systems coupled with wheel-speed sensors and vehicle dynamic constraints can help.
By Kana Nagai, Matthew Spenko, Ron Henderson and Boris Pervan
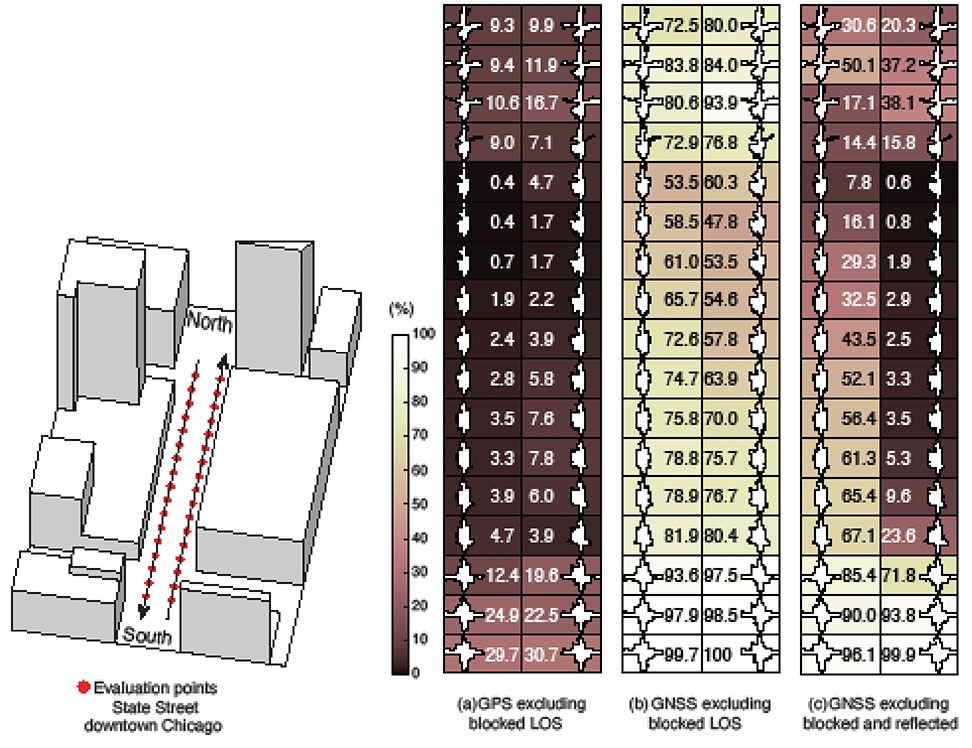
GNSS provides navigation services globally, but satellite visibility in urban areas is limited by high-rise buildings. This creates a mixture of GNSS available and denied environments (see FIGURE 1) — users do not generally know where the system can maintain sufficient levels of accuracy and integrity for a particular application. To begin to address the issue for self-driving cars, we evaluated GNSS-only availability in downtown Chicago.
FIGURE 1 . The figure depicts three types of potential GNSS signal reception: direct LOS signals and blocked LOS signals (left) and reflected LOS signals (right). (Image: Authors)
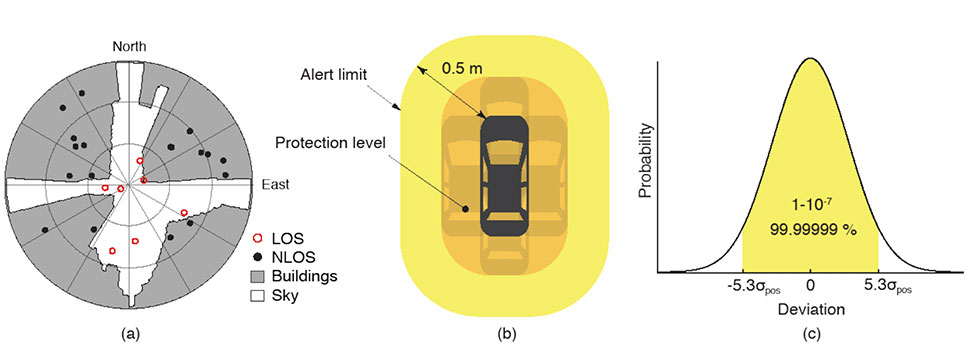
GNSS signal prediction in urban environments has been conducted in previous work. For example, the concept of “shadow matching” was developed to identify GNSS signal blockages in urban canyons. Overlaying sky plots on a hemispherical sky view can be used to distinguish between line-of-sight (LOS) and non-line-of-sight (NLOS) signals (see FIGURE 2a). Reflected rays can be predicted using Householder transformations to reveal potential multipath conditions. Satellites producing blocked or reflected (NLOS) signals should be excluded to maintain integrity.
FIGURE 2. (a) A hemispherical sky view in an urban environment. (b) Illustration of a protection level and an alert limit. To ensure integrity, the protection level must not exceed an alert limit. (c) The allowable probability of exceedance is assumed to be 10−7 in this work. (Image: Authors)
When the number of visible satellites is greater than three, GNSS can resolve vehicle position. However, even in cases where enough satellites are visible, the satellite geometries are generally weak because the dilution of precision (DOP) is adversely affected by the buildings partially blocking the sky. Horizontal positioning error must be bounded by a protection level computed by the vehicle. Then, for navigation to be deemed available, the protection level must not exceed a required alert limit (see FIGURE 2b). The maximum allowed probability of exceedance (see FIGURE 2c) and the alert limit can together be used to determine the maximum allowable position error standard deviation.
Even if the protection level is far below the alert limit in an open-sky environment, it will frequently exceed the alert limit once the vehicle enters a city. GNSS alone is generally not able to maintain availability, so integration with other sensors is needed. Tightly coupling inertial navigation systems (INS) with GNSS using the extended Kalman filter (EKF) provides better estimation in urban environments. The EKF algorithm also enables integration of wheel-speed sensors and vehicle dynamic constraints. These integrated navigation systems will improve availability, but it is still unclear how long such a system can be expected to maintain fault-free integrity in a congested city.
Focusing on the problem of self-driving cars in urban environments, we evaluate protection levels of navigation with practical integrated sensors: GNSS, INS, a wheel-speed sensor (WSS) and vehicle dynamic constraints (VDC). The goal is to develop the means by which we can determine locations where external ranging sources (such as lidar) are needed to maintain continuous navigation with fault-free integrity.
GNSS-ONLY AVAILABILITY
For GNSS availability evaluation, we assume an integrity requirement that the probability of exceeding a 0.5-meter alert limit must be lower than 10−7. The 0.5-meter alert limit therefore corresponds to approximately five times the position standard deviation, so the maximum allowable position error standard deviation is then approximately 0.1 meters. Accuracy at this level clearly requires differential GNSS carrier-phase measurements. We assume a nominal GNSS double difference (DD) carrier ranging error standard deviation of approximately 0.02 meters, and that carrier cycle ambiguities can be readily resolved in an open-sky environment prior to initiation of vehicle motion.
Given the assumptions made of the maximum allowable position error standard deviation and the GNSS ranging error standard deviation, the maximum allowable horizontal dilution of precision (HDOP) is about 5.
FIGURE 3 shows GPS and GNSS availability — the fraction of time the HDOP requirement is met over 24 hours — along a section of State Street in downtown Chicago. The availability results using GPS only and excluding only blocked LOS signals ranged from 0% to 9% along the block and 9% to 30% at the intersections (see FIGURE 3a). Using four full GNSS constellations (GPS, Galileo, GLONASS and BeiDou), availability ranged from 48% to 82% along the block and 72% to 100% at the intersections (see FIGURE 3b).
FIGURE 3. The percentage of GPS or GNSS availability in 3D-mapped downtown Chicago. We exclude satellites producing blocked LOS signals or both blocked and reflected LOS (NLOS) signals from the measurements. Each column expresses a lane of southbound or northbound travel. The availability is the percentage of total time when HDOP meets the self-driving car integrity requirements in 24 hours. (Image: Authors)
When we also excluded satellites producing reflected LOS signals that reach the vehicle, the availability dropped significantly at every point (see FIGURE 3c). We assert that FIGURE 3c expresses the reality of GNSS availability because building-reflected multipath signals degrade positioning accuracy and would affect integrity negatively. It’s obvious from these results that GNSS alone is insufficient to meet the autonomous driving requirements in an urban environment, and multi-sensor integrated navigation systems are needed to augment poor GNSS signal availability.
MULTI-SENSOR INTEGRATION
We begin by considering tightly coupled INS/GNSS integration using an EKF, and then integrate a realistic sensor suite including WSS and vehicle dynamic constraints that enforce resistance to lateral sliding and vertical movement. If it is known from another source that the vehicle is not moving (for example, it is in the parking gear), a static mode constraint (SMC) can also be applied.
INS/GNSS Integration. Tightly coupled INS/GNSS integration with an EKF uses the INS measurement to predict vehicle motion. The continuous process model uses a state vector having the position in the navigation frame, the velocity, the attitude, bias errors and cycle ambiguities, with the input vector having accelerometer-specific force measurement in the body frame and gyro-rotation-rate measurements. A white-noise vector drives the inertial measurement unit (IMU) states.
The GPS/GNSS measurement model includes the measurement vector having carrier and code phases, and the observation matrix containing LOS vectors and the vector of white receiver thermal noise.
INS/GNSS/WSS/VDC Integration. For the vehicle in motion, we developed a model consisting of a WSS measurement in the along-track direction, a non-holonomic constraint resisting lateral sliding, and a holonomic constraint on vertical movement (see FIGURE 4).
The INS/GNSS/WSS/VDC integration using the EKF consists of the process model and the measurement models.
INS/GNSS/SMC Integration. The static mode constraint provides zero-velocity measurements to the EKF measurement update to mitigate position error propagation. We use SMC only when it is known that the vehicle is not moving; for example, when the vehicle is in the parking gear.
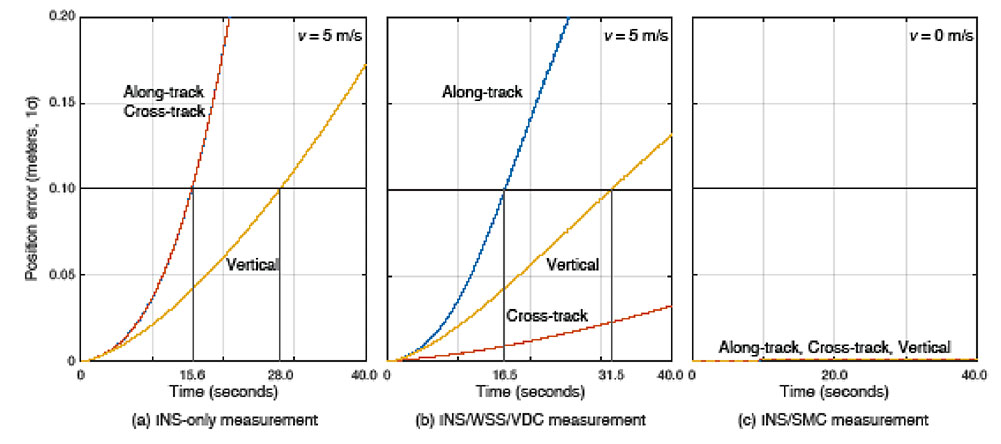
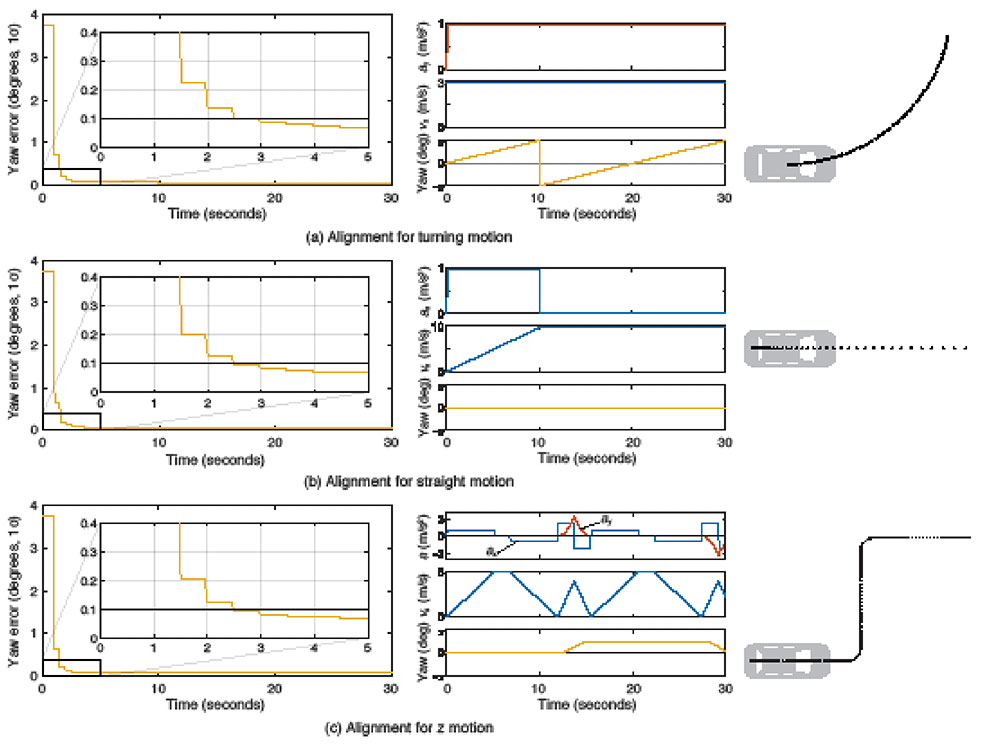
Error Propagation Analysis. We tested the time from perfect initialization to when position error exceeds 0.1 meters in GNSS-denied environments. FIGURE 5 shows the error growth in the along-track (x), the cross-track (y) and the vertical (z). The error specifications for a STIM300 tactical-grade IMU are used in this analysis. The standard deviation of the WSS measurement noise is assumed to be 0.05 meters per second, and the standard deviation of the movement constraint violations is 0.001 meters per second. The vehicle is moving at 5 meters per second except when we test the SMC.
FIGURE 5. The vehicle position error growth vs. time in the along-track (x), cross-track (y) and vertical (z) directions. Each graph represents the navigation system introduced in the multi-sensor integration section. The vehicle is moving at 5 meters per second (a and b) or 0 meters per second (c). (Image: Authors)
The INS can coast 15.6 seconds before the position error standard deviation exceeds 0.1 meters in both the along-track and the cross-track directions (see FIGURE 5a). The INS/WSS/VDC can coast 16.5 seconds in the along-track direction, and significantly more than 40 seconds (the simulation duration) in the cross-track direction (see FIGURE 5b). In static mode, INS/SMC estimate errors do not grow with time in any direction, as expected (see FIGURE 5c). In GNSS-denied environments, the non-holonomic constraint suppresses the cross-track position error, but the WSS measurement hardly affects the along-track position error. The SMC works perfectly, but the usage is limited to when the vehicle is known to be stationary.
SIMULATION SCENARIO
We imagine a future driverless-car mission scenario in which multi-sensor navigation systems are practicable. To minimize congestion in a city, autonomous vehicles will be held outside the urban core when not in use. In the clear open-sky environment, a vehicle in a parking lot completes GNSS initialization using the INS/GNSS/SMC system. Once requested for action, the vehicle departs for the city from the parking lot, and the motion of the vehicle improves alignment by the INS/GNSS system. Safe navigation can be ensured using the system to provide continuity under overpasses and bridges in the open-sky environment. Upon entering the urban core, navigation becomes more dependent on the INS/WSS/VDC system.
A reasonable numerical target for differential GNSS initialized position error is 0.02 meters, and for the INS alignment yaw angle error 0.1 degrees.
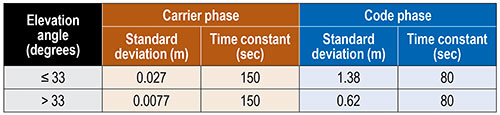
Local GNSS multipath errors from nearby vehicles will vary with the satellite elevation angle. Prior experimental results show that lower elevation-angle satellite signals (below 33 degrees) are much more likely to be impacted by multipath than higher ones (see TABLE 1).
TABLE 1. The nominal GNSS multipath error values in the simulation.
INITIALIZATION AND ALIGNMENT
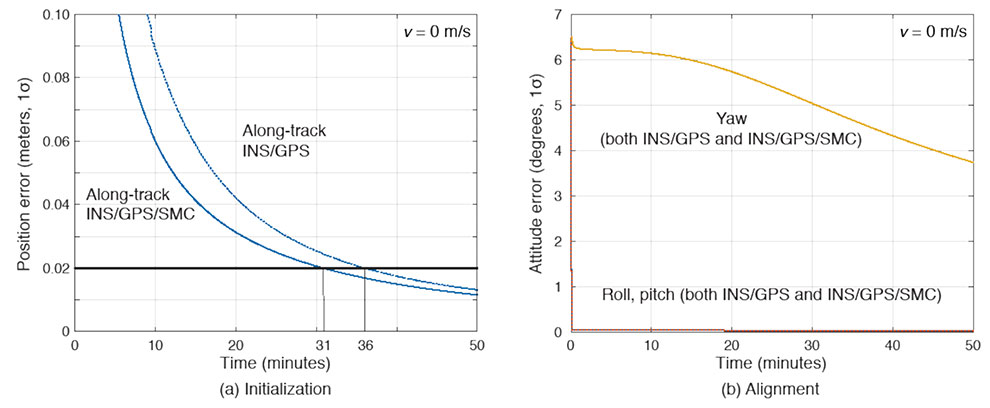
Initialization takes place in a parking lot with a clear sky view. A vehicle is in the parking gear, enabling SMC to be applied. FIGURE 6a shows a typical example: with INS/GPS/SMC, system initialization takes about 31 minutes, and with INS/GPS, about 36 minutes. Therefore, SMC does speed up GPS initialization, although the improvement is modest.
The yaw angle is not aligned during the initialization, but roll and pitch are immediately aligned (see FIGURE 6b). Earth’s gravity affects roll and pitch angle alignment but not yaw angle.
FIGURE 6. (a) Comparisons of initialization time between INS/GPS and INS/GPS/SMC in an open-sky environment. The INS/GPS/SMC system initializes rapidly. (b) Transitions of roll, pitch, yaw alignment during the initialization. Yaw angle alignment cannot be performed when the vehicle is stationary. (Image: Authors)
Yaw angle alignment cannot be performed when the vehicle is stationary or moving with constant velocity. Accelerated motion, either straight or turning, is required. FIGURE 7 shows the behavior of the yaw angle error standard deviation using the INS/GPS system when centripetal (see FIGURE 7a) or tangential (see FIGURE 7b) acceleration is applied. The yaw angle can be aligned in a couple of seconds for either type of acceleration. To represent typical initial motions of self-driving cars, we model a parking-lot departure via a “Z”-shaped path. In this scenario, the yaw alignment error reaches 0.1 degrees within a couple of seconds (see FIGURE 7c).
FIGURE 7. The behavior of yaw angle error when centripetal (a) or tangential (b) acceleration is applied; (c) shows the behavior while following a z-shaped path. The yaw angle can be aligned in a couple of seconds in each case. (Image: Author)
EVALUATION IN URBAN ENVIRONMENTS
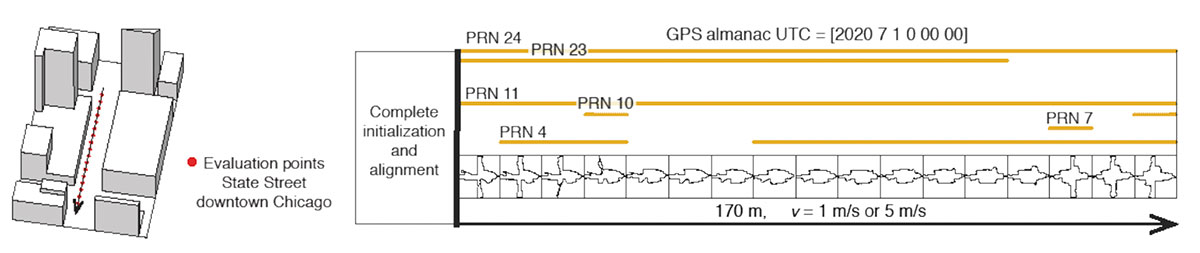
After initialization and alignment in the open-sky environment, we simulated the vehicle traveling into the urban core. The urban environment in our study is 3D-mapped State Street in Chicago, which runs north-south and transits from low-rise neighborhoods to central downtown. We selected one congested section surrounded by tall buildings and computed the position error standard deviation along the path. The evaluation points are at 10-meter intervals over a total distance of 170 meters. The yellow lines in FIGURE 8 denote the visible satellites, identified by their pseudorandom noise (PRN) code numbers, at each point. We assume for convenience that the INS/GPS system is initialized and aligned at the first evaluation point. In reality, we would expect a degraded initial condition because we are starting the simulation in an urban canyon.
FIGURE 8. Evaluation points and PRN numbers of visible satellites at each point. (Image: Author)
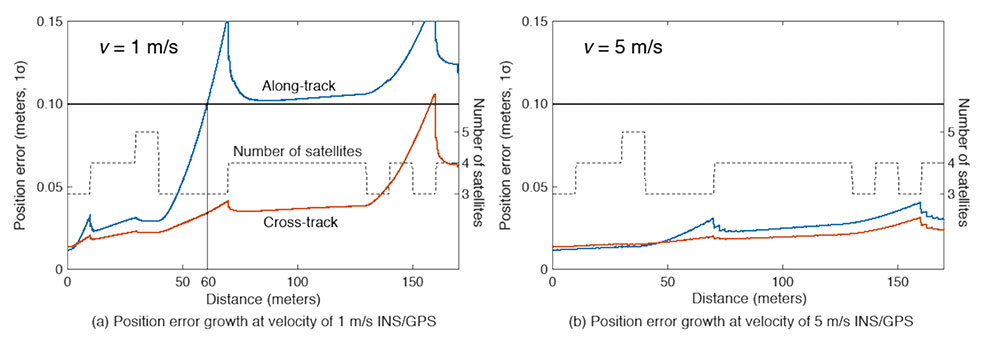
In the first simulation, the car equipped with the INS/GPS system moved either 1 or 5 meters per second. The y-axis in FIGURE 9 represents the position error standard deviation, and the x-axis represents the distance in meters. The dotted line expresses the number of visible satellites. The error when the vehicle velocity is 1 meter per second exceeded the maximum allowable position error standard deviation of 0.1 meter, at the distance of 60 meters. However, when the velocity was 5 meters per second, the maximum allowable position error standard deviation was never reached. It is also clear from the figures that error propagation is significantly affected by the number of visible satellites.
FIGURE 9. A comparison of position error growth between velocities of 1 meter per second and 5 meters per second. (Image: Author)
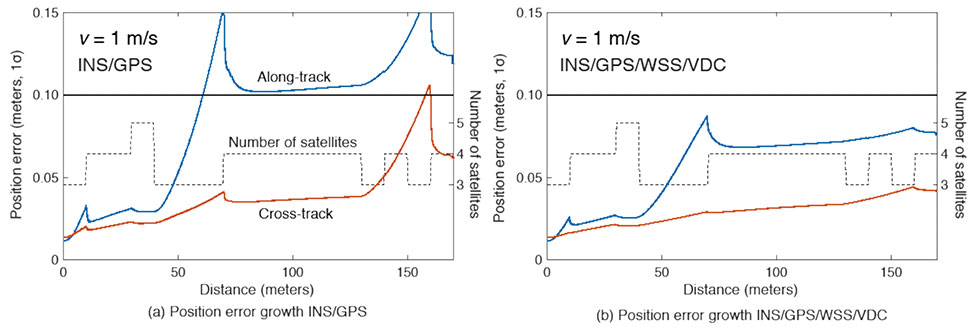
In the second simulation, we compared two different navigation systems, INS/GPS and INS/GPS/WSS/VDC. The vehicle moved at 1 meter per second in the same urban environment. The INS/GPS/WSS/VDC system does provide relief, but the error propagation is still clearly affected by the number of visible satellites (see FIGURE 10).
FIGURE 10. A comparison of position error growth between the INS/GPS and INS/GPS/WSS/VDC systems for a velocity of 1 meter per second. (Image: Authors)
In GNSS-challenged environments, INS error propagation is a function of time. When a vehicle moves faster, it clears the blockage area more quickly, reducing the impact of INS drift — a function of time, not distance. In contrast, GNSS error is completely determined by location. Because INS error propagation depends on how long the vehicle stays in an area of GNSS outage, protection levels for trips through the same area will be different if the vehicle is smoothly cruising or gets stuck in a traffic jam.
CONCLUSION
To gain a better understanding of how long and under what local conditions multi-sensor integrated navigation systems can maintain fault-free integrity, we evaluated navigation positioning errors in 3D-mapped downtown Chicago. The system we developed consists of sensors with which self-driving cars would reasonably be equipped: GNSS, INS, WSS and dynamic constraints. We showed that INS/GPS position errors along the path depend very strongly on the vehicle’s speed. When the system is augmented with WSS/VDC, position errors are suppressed, but the error propagation is still strongly influenced by the number of visible satellites.
ACKNOWLEDGMENTS
The research described in this article is supported by the National Science Foundation. Figure 1 was created by Alexis Arias of the Landscape Architecture + Urbanism Program at the Illinois Institute of Technology (IIT). The authors greatly appreciate the advice and help of Nilay Mistry from that program.
This article is based on the paper “Evaluating INS/GNSS Availability for Self-Driving Cars in Urban Environments” presented at ION ITM 2021, the virtual 2021 International Technical Meeting of The Institute of Navigation, Jan. 25–28, 2021.
KANA NAGAI is a Ph.D. candidate and research assistant in mechanical and aerospace engineering at IIT.
MATTHEW SPENKO is a professor of mechanical and aerospace engineering at IIT. He earned his M.S. and Ph.D. degrees in mechanical engineering from the Massachusetts Institute of Technology.
RON HENDERSON is a professor and director of the Landscape Architecture + Urbanism Program at IIT. He earned his Master of Landscape Architecture and Master of Architecture from the University of Pennsylvania.
BORIS PERVAN is a professor of mechanical and aerospace engineering at IIT. He earned his M.S. from the California Institute of Technology and Ph.D. from Stanford University.
Years ago, a trucker driving down the western slope of the Rocky Mountains lost his brakes. As his truck accelerated, he hoped to make it to the next runaway truck ramp before losing control. However, when he reached it, he saw a car parked at its base with a group of teenagers drinking beers. In a split-second decision, he veered to the left instead and went off the cliff. In the coming years, faced with the same moral dilemma, what would a self-driving truck do?
Matteo Luccio
Many similar scenarios have been discussed in the technical literature on self-driving vehicles. Most of them are variations on the “trolley problem” presented to generations of college philosophy students since it was first formulated by philosopher Philippa Foot in 1967 and adapted by Judith Jarvis Thomson in 1985. In the trolley problem, a person can choose to divert a trolley from the main track, saving five people who are working on it but killing a person on the other track who otherwise would not have been involved.
When faced with an inevitable crash, should a self-driving car slam into a wall to save the lives of three children crossing the street or, in effect, target them to save its two occupants? Most people, when polled, choose the former. When shopping for a new car, however, those same people are more likely to buy one that will make their own safety its highest priority.
Human drivers react to emergencies instinctively — motivated by neither forethought nor malice — and in real time. By contrast, the choices made by autonomous vehicles are predetermined by programmers; their control systems can potentially estimate the outcome of various options within milliseconds and take actions that factor in an extensive body of research, debate and legislation. Therefore, our judgment is harsh if those vehicles make what we deem to be the “wrong” choice.
However, there is no universal agreement as to what constitutes the “right” choice, other than the fact that people generally prefer self-driving cars to minimize the number of lost lives and to privilege people over animals and younger people over older ones. General principles such as “to minimize harm” are of little help in complex and dynamic real-life situations.
Self-driving cars, in addition to their many other benefits, will dramatically reduce traffic accidents and fatalities, because they will never be distracted, drowsy, drunk or drugged. Yet accidents will still happen, and their outcomes will be largely determined far in advance.
The mass introduction of self-driving cars onto public roads will require overcoming technical, legal and ethical challenges. As a society, we will have to agree on a uniform set of ethical codes that will guide these vehicles’ decision-making processes in emergencies. This will force us to explicitly quantify the value of human life and property, and encode it in software. These are hard and uncomfortable choices.
Autonomous systems, fusing data from multiple sensors, will guide these vehicles. It is up to us to decide whom they will target and whom they will spare.
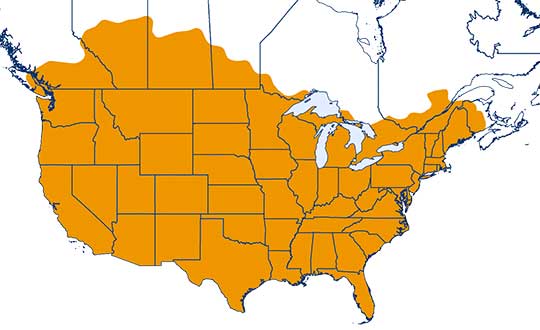
One-inch GNSS accuracy in under a minute, delivering seamless high-precision performance across the U.S. and southern Canada
Trimble has completed expanding its CenterPoint RTX Fast correction service, with coverage now spanning the contiguous U.S. and southern Canada. This expansion is central to Trimble’s vision to transform how and where users can leverage precision and accuracy.
Coverage of Centerpoint RTX Fast. (Image: Trimble)
Designed for autonomous applications in both on-road and off-road markets, the coverage and performance of the service enables industry professionals to re-think what is possible when using augmented positioning for improving safety, performance, productivity and operational efficiency.
The CenterPoint RTX Fast subscription service delivers horizontal positioning accuracy of 1 inch (2 centimeters) or less in under a minute, with the versatility of satellite or cellular delivery. This expanded coverage makes it the largest, high-performance GNSS correction network in the world, according to Trimble.
Base stations not required. The service encompasses more than 5 million square miles across North America and Europe. By using the service, said Trimble, farmers, land surveyors and GIS professionals can untether from the cost and complexities of GNSS base stations.
In addition, Trimble RTX Fast offers a single, continuous correction technology platform for enabling a broad range of safety-critical autonomous applications in markets such as automotive, agriculture and construction.
“This achievement is a major milestone in the continuous evolution of our correction service and autonomy strategy. We are delivering unmatched access to fast, reliable, highly accurate positioning in more areas than ever before,” said Patricia Boothe, senior vice president of Trimble’s Autonomy Sector. “Whether enhancing performance in the autonomy ecosystem or simplifying traditional mapping and surveying workflows, RTX Fast users can gain greater accuracy to improve productivity and operate safely — ultimately transforming the way they work and drive.”
CenterPoint RTX Fast subscriptions for Trimble RTX-compatible GNSS receivers are available through Trimble’s Authorized Business Partners or Trimble’s online store.
University teams will go head-to-head in a two-year autonomous race car competition to test new software and other self-driving technologies at Indianapolis Motor Speedway.
The competition, called the Indy Autonomous Challenge, culminates in a high-speed autonomous vehicle race, scheduled for Oct. 23, 2021, on the speedway’s famed 2.5-mile oval track that is home to the annual Indianapolis 500.
The competition was inspired by the 2005 Defense Advanced Research Projects Agency (DARPA) Grand Challenge, which pitted university teams against each other and spurred commercial development of autonomous vehicles.
“The idea for the Indy Autonomous Challenge originated with DARPA’s winning team captain, [Stanford University’s] Sebastian Thrun. Sebastian joined us at the 2018 Indy 500, where he reflected on the inspiration and excitement that came from participating in the DARPA challenge, and how a high-speed automated vehicle race at the Indianapolis Motor Speedway had the potential to be on par with that experience with today’s teams,” said Matt Peak, Energy Systems Network director of mobility.
Like the DARPA competition, the Indy Autonomous Challenge focuses on university participation. “I can’t speak for DARPA, but our focus on universities is deliberate,” Peak said. “It was advised by not only Thrun, but other original DARPA competitors such as [Aurora CEO] Chris Urmson, all of whom commented on how participation by universities — their students, faculty, departments, alumni — was a key to DARPA’s success.”
The autonomous racing software developed through the competition could assist in developing commercial self-driving vehicles and enhance existing advanced driver-assistance systems (ADAS). Some of the cornerstone technologies include GNSS and digital maps, which provide the accurate location for fully autonomous vehicles.
As was the case with the original DARPA challenge, spurring new innovations and socially beneficial products and services is a goal of the competition, Peak said. “In our case, we see inspiring teams’ creation of software that can solve for edge cases — those problems or situations that occur only at an extreme operating parameter, such as avoiding unanticipated obstacles at high speeds while maintaining vehicular control,” he said. “This applies not only for highly automated vehicles, but also for vehicles equipped with ADAS that aim to help human drivers avoid obstacles altogether. The notion is, if our university innovators can enable cars to outmaneuver others at 200 mph, they certainly can help enable you to avoid that piece of lumber that fell off the pickup in front of you on the 65-mph highway.”
Peak said that a perfect place to demonstrate these technologies is the famous speedway, which for 100 years has tested automotive technology in a demanding environment. “Tackling automation at 200 mph in a race car is a bit more alluring than with a 20-mph people mover,” he said.
In addition to ESN and Indianapolis Motor Speedway, other challenge partners include race-car manufacturer Dallara Automobili and the Clemson University International Center for Automotive Research (CU-ICAR).
$1.45 Million in Prize Money
During the final race at the speedway, teams will compete for $1 million as the first-place prize. Second- and third-place finishers receive $250,000 and $50,000, respectively.
The five-round competition starts with the submission of a white paper to demonstrate vehicle automation with a video of an existing vehicle or participation in Purdue University’s self-driving go-kart competition at the speedway.
During the initial rounds, teams will use sponsor ANSYS’ driving simulator to develop autonomous vehicle software. ANSYS, which will provide $150,000 in prizes to top finishers of a third-round race, will co-host a hackathon to let teams work with the simulator, the company said. The fourth round allows teams to test their vehicles at the speedway in advance of the final race.
So far, five universities have registered:
Korea Advanced Institute of Science & Technology (KAIST)
Texas A&M Transportation Institute (TTI)
University of Florida
University of Illinois
University of Virginia.
Not Everyone Has Championed Autonomous Vehicles…
The new competition is commencing during a time when media reports show that the once-hot autonomous vehicle industry has vocal critics. Recently, Apple pioneer Steve Wozniak, who once headed a GPS-based fleet company called Wheels of Zeus, said he didn’t expect to see a fully autonomous vehicle operating on the streets in his lifetime.
In addition, a few automakers have reined in autonomous vehicle development or have scaled back their technology expectations in recent months.
“Not at all surprising. The traditional OEMs were never going to be disrupters that put driverless mobility-as-a-service cars out there. It isn’t their business model, and it won’t be,” said Alain Kornhauser, Princeton University professor and transportation program director, who was head of the university’s team during the DARPA Challenge, in his Smart Driving Cars weekly newsletter. “Self-driving, I dare say Level 2, is and has always been their sweet spot — it sells cars. Now watch these same companies throw monkey wrenches into those driverless mobility machines to protect their conventional business model.”
Peak says the recent negative press on autonomous vehicles is what happens when any new technology is rolled out. “For any new technology, such as automation, we’re going to see euphoric coverage (automation will solve all of our problems) and pessimistic coverage (automation will never arrive and, if it does, it will make things worse),” he said. “It’s a cycle, it swings back and forth, and we happen to be touching upon the latter, pessimistic end of that cycle.”
Taking a moderate and realistic position about the technology is what the Indy Autonomous Challenge is striving to do, Peak said. “Automated vehicle technologies have a role to play, both in helping humans drive better, and eventually in enabling new markets, such as first/last mile transit solutions. The technologies are light years ahead of where they were a decade ago, and low-level automated technologies are already making a difference and saving lives in today’s vehicles,” he said. “We have a bit of a ways to go before the full potential of automation will be realized, and the Indy Autonomous Challenge will help us address the concerns brought about by the media and others to reach this end goal much sooner than we otherwise would.”
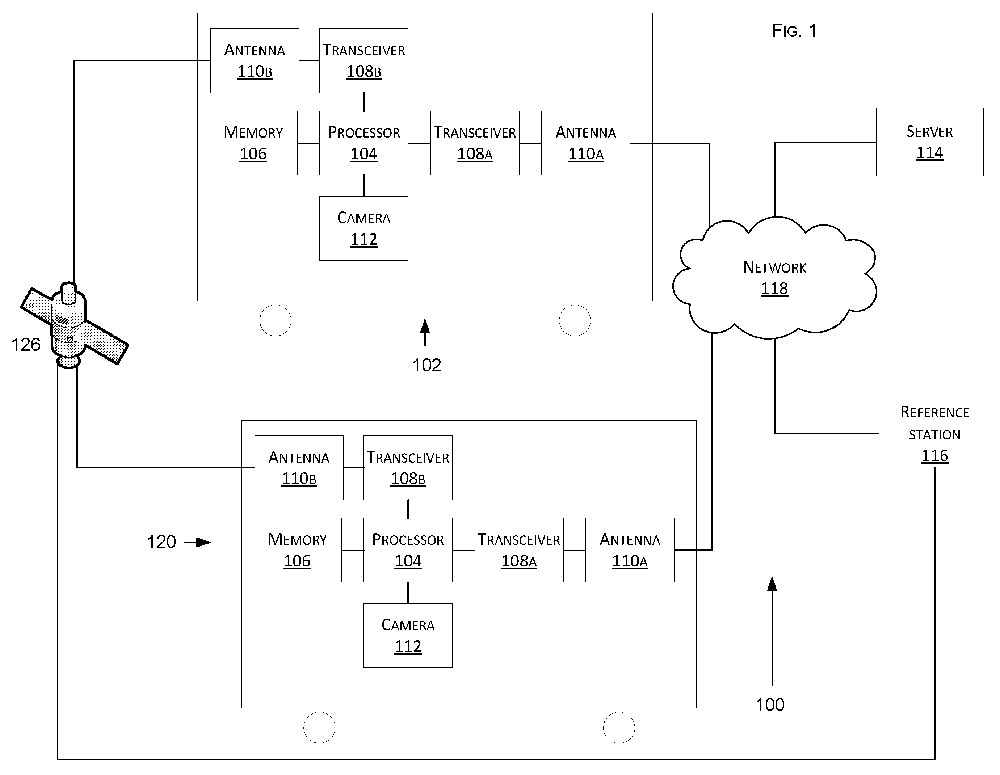
Tesla has developed a technology aimed at providing more accurate positioning for autonomous cars by sharing data between vehicles, according to a U.S. patent application.
The patent, “Technologies for vehicle positioning,” was filed in 2017 and made public in December 2018.
Solutions include cameras detecting matching locations and using other vehicles in its fleet as “cooperative reference stations” to share raw GNSS data and make positioning corrections.
Tesla describes in the patent, “The inventions increase such positioning accuracy via determining and applying offsets (corrections) in various ways, or via sharing of raw positioning data between a plurality of devices, where at least one knows its location sufficiently accurately, for use in differential algorithms.”
Techniques include:
a reference station sharing a positional offset with an automobile,
a reference station calculating and sharing a set of parameters (offsets and corrections) for various error components including atmospheric, orbital and clock,
a reference station sharing its raw GNSS data so that vehicles can remove errors through differencing or other calculations.
Tesla also would correct GPS data by matching camera data with vision maps to detect the exact location of a vehicle. With this vision-map matching localization approach, “a location estimate is varied until the location estimate makes a camera-reported lane boundary coincide with a map-reported lane boundaries,” the patent reads.
Schematic of Tesla’s system shows two vehicles (102, 120) feeding data to a network, a server and a reference station. (Image: Tesla)
In a unique car accident, a self-driving Tesla Model S hit and destroyed an autonomous Promobot, the robot model v4, on Jan. 6 in Las Vegas. The incident took place at 3000 Paradise Road, Las Vegas.
At 7 p.m., the Promobot’s engineers transported robots to the Vegas’s Congress Hall to prepare their booth at the Consumer Electronics Show, being held Jan. 8-11. All the robots were moving in a line. But one of them missed its way and drove to the roadway of the street parking lot.
At that moment, it was hit by a self driving Tesla car.
This video is property of Kevin Jenkinson, via Promobot.
After the clash, the robot was pushed aside and fell. The car continued to move and stopped 50 meters away from the accident. The passenger who was in the car while driving explains that he decided to try the self-driving mode (Full Self-Driving Capability) and chose an idle area for this test.
“There was nobody there, no men, no cars. I switched this Tesla into a self-driving mode and it started to move. And wow! A robot on the track! I thought the flivver would come round, but it bumped straightly into it! I am so sorry; the robot looks cute. And my sincere apologies to the engineers,” said George Caldera, a Tesla passenger.
As a result, the robot suffered serious damage. Parts of the body, the mechanisms of the arms, the movement platform and a head are destroyed. Now the robot is not able to take part in the exhibition and most likely there is no way to restore it.
This video is property of Steven Smith, via Promobot.
“Of course we are vexed. We brought this robot here from Philadelphia to participate at CES,” said Oleg Kivokurtsev, Promobot’s Development Director. “Now it neither cannot participate in the event not to be recovered. We will conduct an internal investigation and find out why the robot went to the roadway.”
The Tesla S reportedly uses the u-blox NEO-M8L GNSS chip. The company also in December 2018 received a patent for more accurate GNSS positioning using other vehicles as reference stations to share raw GNSS data and make positioning corrections.
Promobot is a manufacturer of autonomous service robots for business with development centers in Europe and Asia. Several hundred of Promobot robots operate in 26 countries around the world. They work as consultants, concierges, guides and administrators. At CES, Promobots will meet attendees at the Promobot booth, where it will give dance performances every hour.
The robot victim’s relatives have been notified. (Screenshot from video by Kevin Jenkinson)