In September, I attended the Institute of Navigation (ION) GNSS+ conference in Tampa, Florida.

The ION GNSS+ conference is a gathering where many of the GNSS scientists from around the world come to share their successes, trials and tribulations. It gives one a view into the future of where GNSS positioning might go. Granted, most of the ideas and concepts presented won’t ever be introduced in a commercial product, but it’s great to see that engineers are pushing the technology envelope to see how much they can squeeze from receivers.
As I was perusing the ION GNSS+ conference agenda, I was looking for presentations and other subject matter relevant to RTK GNSS technology. (Yes, I’ve been obsessed with low-cost RTK receivers this past year, if you haven’t been following).
I’d like to tell you about two presentations I attended. The first was sort of unexpected, and the second was every bit of what I hoped it would be.
The first was a presentation by SubCarrier Systems Corp (SCSC), a small consultancy focused on ITS (Intelligent Transportation Systems) technology. It just so happens, according to David Kelley of SCSC, that RTK receivers and RTK networks will play a critical role in the future of ITS and, as a result, help drive down the cost of RTK technology.
How is RTK relevant to ITS?
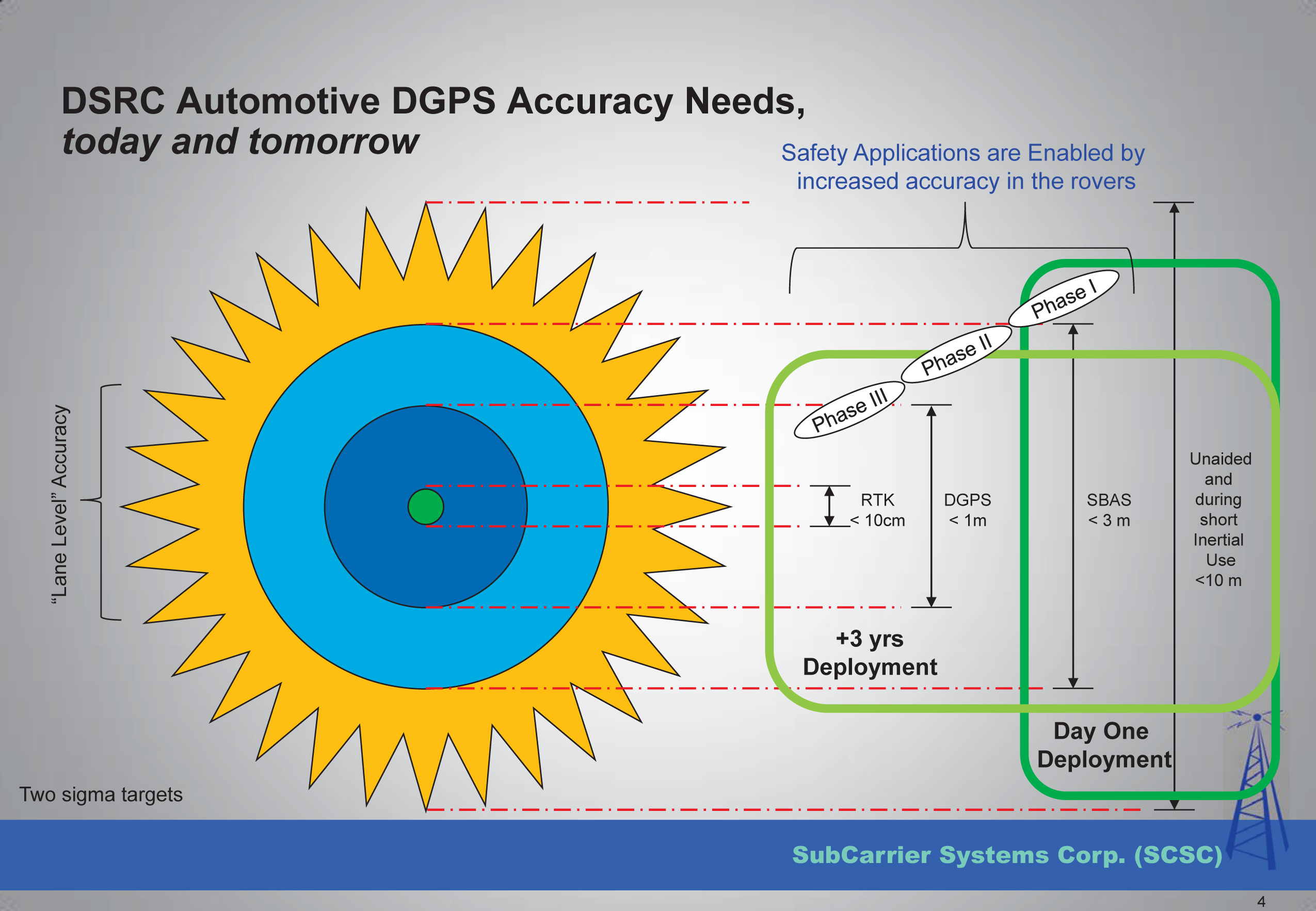
In ITS, I’ve been told there are three levels of accuracy that drive particular ITS applications. The accuracy terms are expressed in transportation terms:
- Which Road?, Which Lane? and Where in the Lane?
Translated into GPS accuracy terms:
- Which Road? = Autonomous GPS — 5-meter accuracy
- Which Lane? = WAAS (or SBAS)-corrected GPS — 1-meter accuracy
- Where in the Lane? = RTK — 2-cm accuracy
Mr. Kelley further presented that transportation applications of RTK technology will drive mass-market adoption (commoditization) of RTK technology and into the millions of units sold.
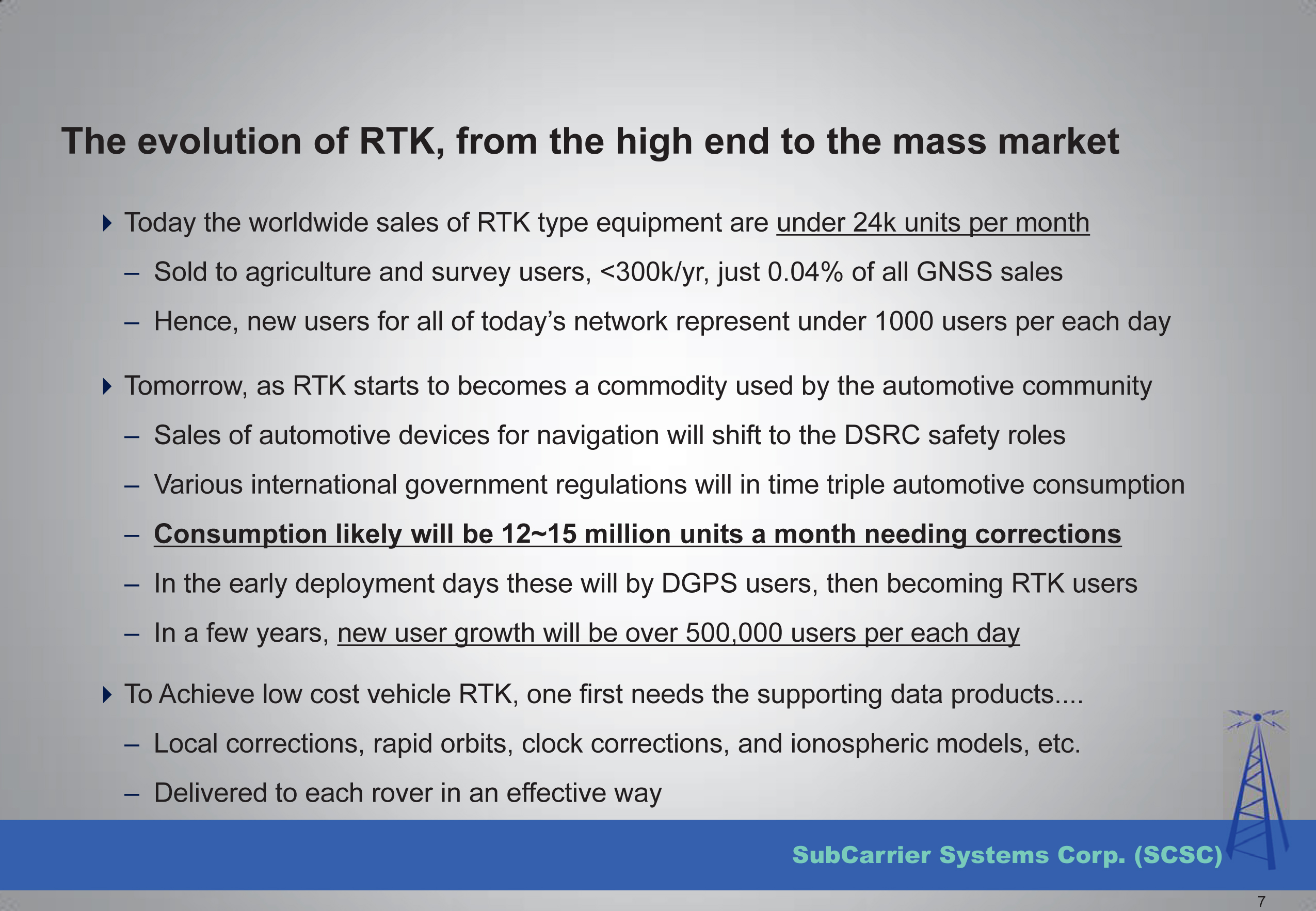
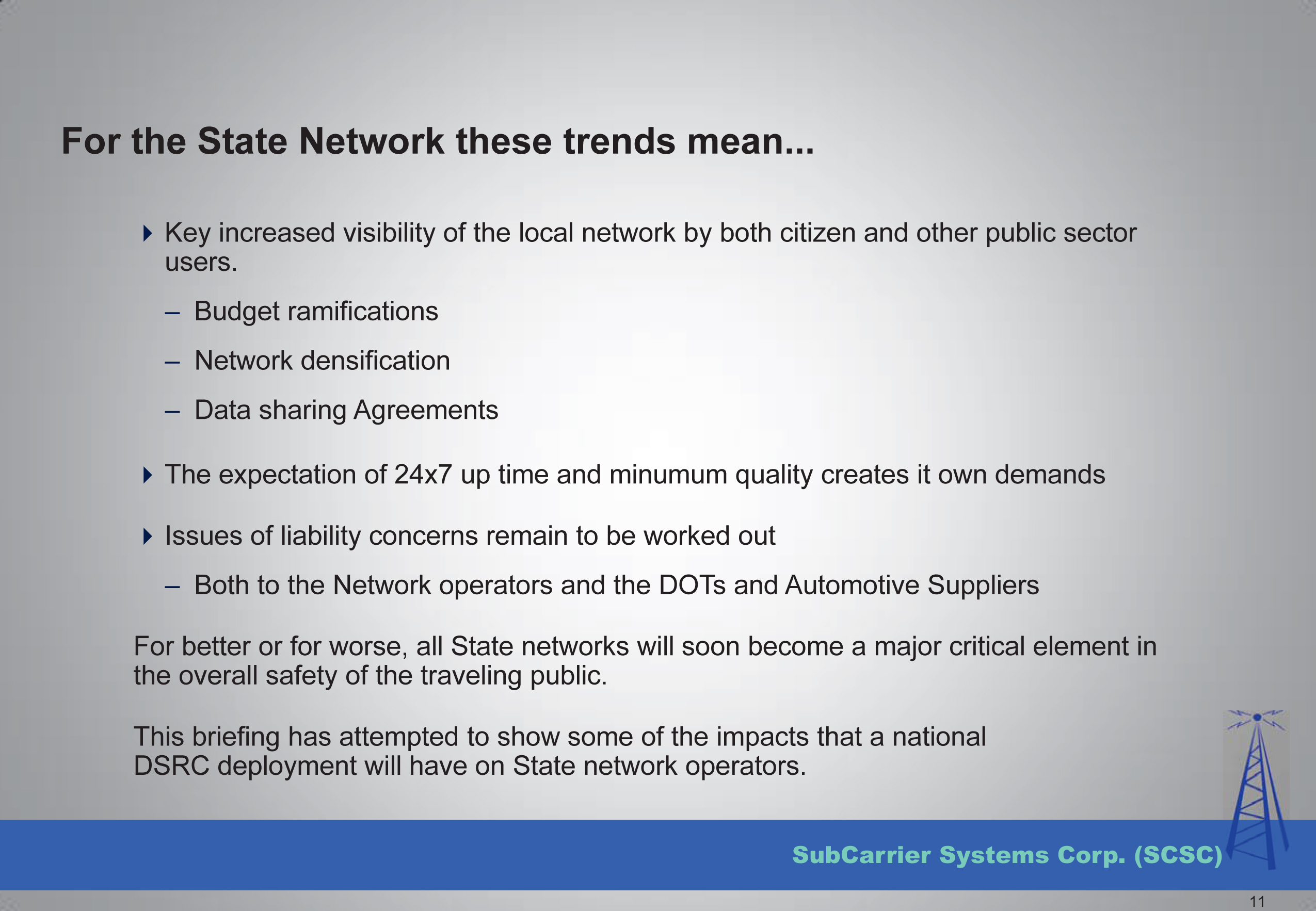
Lastly, he discussed the strain that such massive deployment of RTK technology in transportation might place on existing RTK networks run by state agencies.
To view the entire presentation from Mr. Kelley, you can click here.
The second RTK-centric presentation I attended at the conference was a moderated discussion panel entitled “High-Precision GNSS — What Will It Look Like in 2020?”
If you’ve followed my articles over the past couple of years, you have to know I was looking forward to attending this discussion panel with great anticipation.

High Precision GNSS – What will it Look Like in 2020? Photo: GPS World
The discussion panel members were (from right to left):
- Gian Gherardo Calini – European GNSS Agency
- Ivan Di Federico, Chief Strategy Office and EVP, Topcon Positioning
- Bernhard Richter, GNSS Business Director, Leica Geosystems, Switzerland
- Elmar H. Lenz, General Manager – Geospatial GNSS, Geospatial Division, Trimble Navigation Ltd.
- Jan Van Hees, Director of Business Development, Altus Positioning Systems
- Shaowei Han, Co-founder and CEO/President, Wuhan Navigation and LBS, Inc., China
The discussion began with a short presentation by Gavin Schrock, who, among other things, administers the Washington State Reference Network, a state-wide RTK network, to frame the discussion.
Next, each panel member commented on the presentation and provided some of their own thoughts. The thoughts by the mainstream manufacturers were largely what you’d expect, since they do not look forward to the day that RTK technology becomes a commodity.
I’ll cut to the chase and just say that the gentleman from China, Dr. Han, stunned the audience with his claim that RTK GNSS chips will eventually be sold for $20 each. OK, to be fair, he also said RTK GNSS modules (an RTK GNSS chip on a circuit board with supporting components) will sell for $100. At first, these numbers seemed somewhat shocking to the audience, and one might dismiss it as being a speculative pipe-dream to disrupt the current RTK receiver competitive landscape. But then, when questioned, he dropped the reality bomb with a sort of puzzling look at the audience, being a little surprised why they didn’t understand. He said, and I’m paraphrasing, that $100 for an RTK module in 2020 doesn’t seem to be a stretch at all if you consider that RTK GNSS modules in China are selling for only $400 today. BOOM! He dropped the hammer. I admit, the $400 number even surprised me a bit. I thought it was more like $800.
The reason for the low price is the number of RTK GNSS receivers sold in China is more than 100,000 per year now, and growing. That’s more than the rest of the world combined. What’s driving the demand for RTK GNSS receivers? You guessed it — transportation. While the mainstream RTK GNSS manufacturers are still talking about RTK GNSS technology for niche markets like surveying, engineering, GIS, construction, and agriculture, Dr. Han was talking about RTK GNSS technology being used by everyday consumers for everyday activities. He’s talking about the commoditization of RTK GNSS, and he’s right. The only question that remains is how soon it will arrive.
Thanks, and see you next month.
Following me on Twitter at https://twitter.com/GPSGIS_Eric