Trimble hardware and software tracked the position and motions of the machines and displayed to the operators the position of their tools underwater. (Photo: Trimble)
A new, twin cable-stayed bridge was built a few yards north of the original bridge by Tappan Zee Constructors LLC (TZC), a consortium of firms. The Left Coast Lifter — a huge crane on a barge previously used to replace a span of the San Francisco-Oakland Bay Bridge — was used to install groups of pre-assembled girders one full span at a time. Construction of the new bridge and demolition of the old one overlapped, with the entire project completed in May 2019.
The project was huge, complex and on an accelerated schedule. “Challenges included the size of the bridge, the river’s current, tidal variations, the water’s turbidity and strong winds,” recalled Jonathan White, product manager for Trimble Civil Construction Field Solutions, Marine. Conditions were particularly challenging for bathymetric data collection before and during the project. “The low visibility in the water made it a prime situation for sonar technology to play a major role.”
A licensed surveyor conducted a pre-dredge bathymetric survey, which was loaded into the construction software as a baseline. Trimble hardware, software and technical advice supported the demolition of the old bridge.
“As they were beating down the bridge with the jack hammers and trying to pick up the rubble from the river with the cranes, the main challenge was to keep the 11 machines that they had updated in real time with the most accurate 3D data, so that they could keep working,” explained Nathan Keys, a geospatial engineer at Measutronics, a Trimble dealership and project lead for the Tappan Zee Bridge project.
Rather than mount a sonar to the front of each construction barge, they used a single survey vessel to serve the machines (eight excavators and three clamshell cranes) with real-time data, using networked connections to update one machine at a time.
Whenever a crane operator thought he was done in an area — the machine guidance display in his cab told him that he had achieved the design depth — the survey boat would verify that, and either give the operator the go-ahead to continue working or point out any spots that were still too high or too low. “That way, they would avoid having to return to an area, which costs time and money,” Keys said.
Trimble equipment provided the positioning of the machines, tracked their motions, and visualized them, enabling the operators to “see” underwater where their bucket, grapple tool, clamshell, or other tool was operating. Trimble supported its dealer and the consortium that was executing the project, White said. “Measutronics is very well versed in the capabilities of Trimble equipment and, more broadly, marine construction workflows generally. If a piece of their equipment went down, we could swap something out and provide them with any support that they needed, and expedite that support because we knew how crucial it was with them being in the field pretty much 24/7.”
Marine excavation. The survey vessel was equipped with a Teledyne RESON T-20 multibeam sonar and a Trimble Applanix POS MV WaveMaster for motion and position. “The eight excavators were equipped with a Trimble marine excavator guidance package, which includes a GPS receiver and angle sensors working together to give guidance to the tool, whether it is a jack hammer, a bucket or whatever,” said Keys. “They also had three clamshell cranes with rotational encoders on the wire-out drums, to keep track of the bucket’s vertical. The central piece to all this is the Trimble Marine Construction software, which takes in the data from all the sensors, including the sonar, in real time and updates the display in the cabin.”
To install its sensors on machines, Trimble provides flexible aftermarket kits that come with weld plates. “We just point out to the customer where to weld the plates, then we will put the sensors on, run the cables to the cab, and do all the wire runs,” Keys explains. “It does not matter whether it is a Caterpillar or a Kobelco or whatever. They are aftermarket systems, so they can go on pretty much any machine.”
This project, Keys clarified, involved only machine guidance, not automation. “We were not using any of the machines’ own sensors. We showed them where they were and then the operator would have to control it.”
Trimble provided precise position and heading, White said. “Through a very accurate measure of where each of these sensors is installed relative to the phase center of the GPS antenna, we can determine how the machine is moving and measure that movement, so that we know exactly where the tool is relative to the position that we are getting from our satellite trilateration. It is not like the guy is sitting in the seat drinking a cup of coffee while the machine parallel parks itself. However, he is receiving a lot of information from all those sensors as to his tool’s position relative to that GPS location.”
Keys said the machines constantly log the data and their movements while they are running. “We can go back into those log files and pull out whatever we want,” he said. “On the survey side, when they do a scan or a survey of an area, that data is captured as a 3D point cloud of what the bottom looks like, which you can import into any software to visualize and quantify the riverbed and the rubble.
“The availability of that real-time sonar data kept those machines productive,” Keys said. “It keeps them from having to go back and do any kind of re-work.”
White said the technology is getting more affordable and user-friendly. “That is leading us, as a manufacturer, to look for ways to help further bring it into our standardized workflows. We have been working with Teledyne on those objectives.”
Trimble is also keen to advance the networking component, specifically to the marine sector, White added. “It is relatively new to marine construction projects. The ability to have a sonar vessel speaking to a machine, and all the machines to speak to each other, and to share a survey file is a very important objective for us.”
Hemisphere GNSS is primarily known for its Outback brand. It includes the Outback Guidance autosteering solution (a smart antenna that combines a GNSS receiver and a GNSS antenna in a single housing), the ESI² electric wheel that steers a tractor, the AC110 application controller that controls the rate and section, and the Rebel terminal in the cab that runs the application software. Hemisphere’s A222 smart antenna is being used by Raven and AgJunction.
“We put these product components together in different configurations for the solutions,” said Miles Ware, the company’s marketing director. “We support hundreds of tractor models with this type of solution or using our terminal for a steer-ready integration, in which you just plug our terminal and steering controller right into the tractor’s interface and it sends the commands to the hydraulic steering.”
One of the challenges with guidance for precision agriculture is that people think that tractors always operate in a wide-open field, where satellite availability is not a problem, Wares explained. That is often not true, however, due to obstructions such as tree canopies.
That is particularly an issue when using real-time kinematic (RTK) corrections for planting and seeding, which require a couple of centimeters of cross-track accuracy. Farmers want to quickly acquire a line and then maintain it. “All those functions are immediately impacted if you have challenges in the positioning solution,” Wares said.
The Outback Guidance brand offers three different packages:
Atlas Broad-Acre farming for uses that require sub-meter accuracy, such as large seeders or fertilizer sprayers;
Atlas H10 or the Atlas Row-Crop Service for row crop-level accuracy, for example to plant corn; and
a sub-inch package that uses RTK technology for automated steering.
One of the key benefits of automated steering is less fatigue for the driver, explained Roland Moelder, Hemisphere GNSS’ product manager for Agriculture Technology. “Especially when it is dark, it is very hard to do a proper job, minimizing the overlap but also not leaving gaps.”
Automated steering also enables farming practices that require more accurate driving than is humanly possible, such as for strip till, the practice of driving on exactly the same lines year after year.
Application-Guided Planting. Hemisphere’s devices can monitor, control and manipulate implements that use ISOBUS standard communications. Operators can select the attributes of their planter in the application; the display will then show them the planter’s location and which sections are active.
For example, if they are approaching a section of the field that they already planted, the AC110 control will turn off some of the seeding heads during the turn.
The same applies to spraying. The product automates the section control and coordinates it with the centimeter-accuracy steering.
Hemisphere’s solution is built around an after-market, so that farmers are not forced to buy the latest and greatest piece of equipment to take advantage of its technology, Wares added. “They can take a lot of their existing equipment, on which they may have already achieved the return on investment or are close to it, and add our solution.”
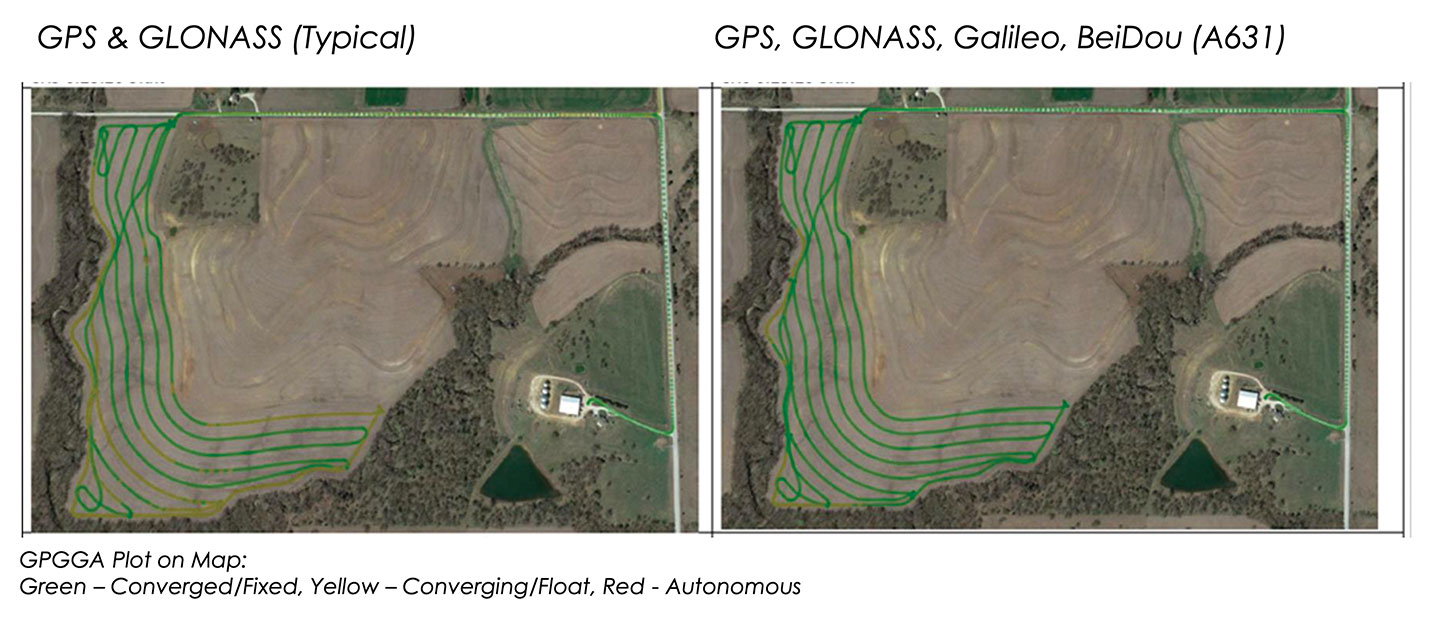
These two plots show how signals from additional GNSS constellations improve mapping. The map on the left is based on only GPS and GLONASS signals, which is typical. The one on the right is improved by adding signals from Galileo and BeiDou. In both images, the green lines are converged/fixed. In the image on the left, the yellow lines are converging/floating. (Images: Hemisphere GNSS)
Do-It-Yourself. To facilitate the installation of its smart antenna, Hemisphere works with all the manufacturers of tractors, sprayers, combines and other field vehicles to make kits that enable customers to perform the installation themselves.
“We take pride in that,” Moelder said, adding that some installations are done by dealers. The ESI2 electric wheel solution is a much easier installation than a hydraulic one. “We also support a list of ‘steer-ready’ vehicle installation kits, which are kits that utilize pre-existing components that are already on the OEM machine, where we just plug-and-play components and make it very easy for the customer to use what is already there.”
Historically, many of these solutions were built around adding hydraulic valves to a tractor, which was a lot of work. “Now, we can communicate directly to the smart valves on steer-ready models,” Wares said, “and it does not require, say, extra hoses, valves and brackets.” Electric wheels, which have tens of thousands of teeth, can manipulate the hydraulics with even finer resolution and are much easier to install than hydraulic valves.
Multi-GNSS technology has a big value for precision agriculture, Moelder said. He cited Hemisphere’s new S631 smart antenna, which tracks all available signals, greatly speeding convergence and maintaining it much better in challenging environments.
Unlike other corrections systems, Hemisphere’s Atlas uses all the available GNSS constellations. “If you are not taking advantage of them, you are really missing out,” said Wares. You cannot take full advantage of a multi-GNSS receiver without multi-GNSS corrections, he pointed out.
What is your pet peeve about how GPS/GNSS is portrayed or discussed in the media and popular culture?
Terry Moore, professor emeritus, University of Nottingham
“What really annoys me is the misinformed assumption that SatNav and GNSS are one and the same. There is now a proliferation of ‘Do Not Follow SatNav’ signs [in the United Kingdom], and so many anecdotal stories about accidents caused by drivers blindly following SatNavs in their vehicles. These are almost always due to the deficiencies of the mapping and the route guidance components of the SatNav systems and not due to any problem with GNSS whatsoever. Nevertheless, it is GNSS that takes the blame.”
Terry Moore University of Nottingham
Julian Thomas Managing Director
“In films, you often see what looks like the tracking of a person inside a building using GPS. Yet, this cannot be done currently with satellites and the kind of technology that can track people or objects indoors is highly specialized and localized to that environment.”
Julian Thomas Racelogic Ltd.
Stuart Riley, vice president of GNSS technology, Trimble
“My pet peeve is the oversimplification of consumer navigation issues. I ran a few searches for ‘GPS fails’ and almost immediately saw images of cars in water and stuck in narrow streets. All too often, this is attributed to a GPS issue or failure. From a consumer perspective, the overall system from maps to satellites is considered GPS. The reality is that GPS (the satellites and control segment) is extremely reliable. Historically, satellite issues have been minimal. The most likely navigation errors are routing errors and old or erroneous maps, coupled with users blindly following the directions, and, to a lesser extent, receiver design issues (e.g., lack of ICD compliance) and harsh conditions (deep urban canyons).”
Stuart Riley Trimble
Mitch Narins
“For many, GPS/GNSS remains the miracle cure for all that ails you — for position/surveillance (e.g., ADS-B), for navigation (RNAV and RNP), and for the largest user base, time and frequency. Even while acknowledging the risks, many still treat GPS/GNSS interference as the 500-year flood that will ‘never’ happen in their lifetimes and, if it does, can be excused away as force majeure. It seems that in most of the articles I read it is always a sunny day and GPS/GNSS works perfectly. The need to incorporate resiliency is never emphasized. Nobody would buy a car without a spare tire. Isn’t it time for GPS/GNSS users to recognize the need and insist that an appropriate PNT ‘spare’ be included in the deal?”
Mitch Narins Consultant
Headshot: F. Michael Swiek
“We can chuckle while watching spies, super sleuths, and adventurers receive GPS positions in incredibly challenged environments — even in caves. My main beef is that nowhere is any mention made of who operates GPS. Instead, GPS is treated as an assumed given, embedded in a smart device, constantly and reliably available on demand anywhere and under all conditions. It is about time recognition and credit is given to those who actually make the miracle of GPS happen.”
integration with inertial measurement units (IMUs) and other sensors
positioning using cell phones and other consumer devices
any other areas or challenges they find particularly significant.
All four respondents in this issue, like to those in the January issue, report that they are making full use of the new GNSS signals available, taking hardware and software measures to counter jamming and spoofing, and integrating IMUs and other sensors with their GNSS receivers to help achieve continuous navigation and positioning in obstructed environments. In addition, they are continuing to develop mass-market applications, because high-precision positioning is becoming increasingly important for cellphones and wearable devices. For a fuller review of these trends, see my introduction to the first installment.
Notably, two of the companies featured in this issue, ComNav Technology and Unicore, are Chinese.
With Chad Pillsbury, Senior Director, Raytheon Intelligence & Space’s Resilient Navigation and Reconnaissance Solutions
Utilizing Galileo and BeiDou
Integration and fusion of multiple space position services is a key element in achieving assured positioning, navigation and timing (PNT). A combination of commercial and military-code navigation signals, when coupled with evolving sensors, provide more resilient methods of navigation and enable new concepts of operations related to PNT. Over the next two years, RI&S will customize these concepts of operation (CONOPS) for our United States and international allies to harness the power of fusion in resilience.
Dealing with jamming and spoofing
As threats to GPS continue to evolve and mature, RI&S continues to develop alternative navigation solutions, as well as GPS-capable receivers and antennas, aimed at defending against a variety of spoofing and jamming technologies. Our latest anti-jam, anti-spoof and high-precision solutions leverage a recent technology breakthrough that lowers size, weight, power and cost while boosting performance in the new M-code and alternative navigation applications.
Integration with IMUs and other sensors
IMUs are the cornerstone of high-performance navigation systems and will continue to be in the future. Recent innovations allow some systems to become more IMU agnostic, or even to consider microelectromechanical systems (MEMS) IMUs depending on performance, which can allow the customer greater flexibility and a more open architecture.
Positioning with consumer devices
RI&S sees 5G as a game-changing technology, with a lot of possibilities in the assured navigation market. We also look to cellphones as a great area of interest — especially for exploring unforeseen signals, considering human international models, and learning how the next generation of GPS users expect to see PNT information displayed.
Other significant challenges and opportunities
The future of GPS lies in a system-of-systems approach. Using time as a backbone, navigation systems can securely share time, data, position and intent across the network. Broadly, this approach can be used in civil, commercial and military environments. RI&S is fully focused on developing capabilities to achieve this ideal state.
Unicore Communications
With Gao Jingbo, Marketing Director
Utilizing Galileo and BeiDou
Most of Unicore’s high-precision products support all constellations and multiple frequencies. The new BeiDou 3 provides precise point positioning (PPP) service from three geostationary satellites via the B2b frequency, while Galileo offers up to five frequencies — E1, E5a, E5b, E5 AltBOC and E6. End users will benefit from improved PNT availability, reliability and continuity as access to those signals greatly reduces multipath effects and allows faster PPP convergence times.
Dealing with jamming and spoofing
To effectively deal with signal jamming and spoofing, it is important to know their sources. GNSS receivers also are susceptible to electronic interference and vulnerable to complex electromagnetic environments. Unicore integrates GNSS RF, baseband and algorithms into a single GNSS system-on-chip (SoC) that mitigates external interference. Joint time-frequency domain interference mitigation technology also is adopted in chip design.
Photo: Unicore Communications
Integration with IMUs and other sensors
Demand for seamless, accurate indoor-outdoor location is increasing. The integration of GNSS with IMUs, lidar, cameras and other sensors helps achieve continuous navigation and positioning in obstructed environments such as urban canyons and tunnels. Unicore offers receivers integrated with both high-end IMUs and affordable MEMS-based devices. Dual-frequency GNSS plus MEMS provides an ideal positioning solution for automotive applications.
Positioning with consumer devices
High-precision positioning is becoming increasingly important for cellphones and wearable devices, and multi-scenario adaptation is necessary. Instead of integrating standalone GNSS chips with smartphone processors, cellphone manufacturers prefer to cooperate with GNSS manufacturers through GNSS intellectual property (IP) licensing. To ensure high-precision service, better cellphone antennas are also important.
Other significant challenges and opportunities
We strive to deliver reliable, timely and smart positioning for anything, anywhere, anytime. Next-generation GNSS location products and services should be more end-user-friendly. The hardware interface will be more universal, flexible, configurable and adaptable with different algorithms for a diverse range of applications.
Teleorbit
With Daniel Seybold, CEO
Utilizing Galileo and BeiDou
Our GOOSE receiver has been able to use Galileo since its beginning and BeiDou since the forth quarter of 2020. Signals from both can be used individually or with other signals (GPS, Galileo, GLONASS and BeiDou, plus SBAS).
Dealing with jamming and spoofing
Open Service Navigation Message Authentication (OSNMA) is now implemented on the GOOSE, which helps mitigate spoofing attacks. GOOSE’s recording function enables users to record simulated jamming/spoofing attacks, and then analyze the behavior of the GOOSE and the received signals. We are developing various GNSS antenna arrays for nulling and beamforming, as well as a left- and right-hand circular polarized (LHCP/RHCP) antenna with GOOSE adaption for signal processing.
Signal conditioning on the GOOSE platform is based on a high-rate discrete Fourier transform (DFT)-based data manipulator algorithm, known as an HDDM algorithm, that fulfills multiple roles. The HDDM algorithm removes a wide range of interference signals, equalizes the spectrum, or restructures the spectrum.
Image: Teleorbit
Integration with IMUs and other sensors
We offer a GNSS antenna with an integrated IMU. Thanks to its open software interface, fusing IMU or other sensor data with GNSS data is easily done with GOOSE. Vector tracking, deep coupling and other sensor fusions (for example, 5G) are on the GOOSE roadmap.
Positioning with consumer devices
Our ongoing AMELIE project will study advanced techniques for the miniaturization and radiation enhancement of GNSS mass-market antennas to be applied in the design, manufacturing and testing of a multi-frequency, low-cost, high-gain dual circularly polarized antenna for the next generation of consumer devices. In 2021, we will build the following antenna demonstrators: single-frequency (L1/E1), dual-frequency (L1/G1/E1, L5/E5a/E5b) and multi-frequency (L1/G1/E1, L5/E5a/E5b, L2, E6).
Other significant challenges and opportunities
GOOSE can track the Galileo E5AltBOC (wideband) signal, which provides code-range variances below a few decimeters. This offers a significant increase in the accuracy of code measurements in terms of reduced noise and mitigation of multipath effects, compared to conventional signals. GOOSE will provide two different approaches for robust tracking: vector tracking for dealing with challenging environments where multipath occurs or buildings block signals, and adaptive tracking to allow the receiver to acclimate to its surroundings by adapting the bandwidth in the loop depending on movement, such as high dynamics.
ComNav Technology
With Min Xu, Director of GNSS Technology R&D Department
Utilizing Galileo and BeiDou
We keep up with the development of GNSS. Our new K8 series of high-precision GNSS modules support the recently completed BDS-3 and Galileo constellations concurrently, significantly improving positioning accuracy especially when signals are partially obstructed. Despite their complex design, the size of K8 modules decreased by almost 36% from their precursors and power consumption dropped to 1.0W, making them easier to integrate.
Dealing with jamming and spoofing
We have developed algorithms to eliminate specific forms of jamming and spoofing, with a focus on narrowband interference. The newly released Quantum III SoC chip — integrated with wideband signal-receiving technology, wideband and narrowband anti-interference technology, and anti-continuous wave interference technology — can provide high-quality observation information in a complex electromagnetic environment.
Photo: ComNav Technology
Integration with IMUs and other sensors
There is an increasing need to add IMUs to supplement obstructed GNSS signals. Empowered by a high-precision IMU, our N5 receiver supports tilt survey with accuracy of less than 2.5 cm. Users can survey without a centering bubble as its calibration-free tilt compensation protects it from magnetic disturbances. We are also focusing on image sensors, such as cameras and radars, to make data collection more flexible and reliable.
Positioning with consumer devices
Our high-precision products are mainly used in professional fields such as land surveying, deformation monitoring, and UAVs. We are continuing to explore GNSS products for consumer markets, which are sensitive to power consumption and cost. The upcoming M10 GNSS is a compact and portable receiver for mass-market applications, such as person or vehicle tracking and fleet management.
Other significant challenges and opportunities
GNSS technology can be widely applied in agriculture, transportation and infrastructure construction. We developed the AG360/AG360 Pro Agricultural Automatic Driving system, which drives autonomously without damaging crops. We collaborated with China Mobile to build more than 2,000 CORS stations to provide high-precision positioning services in support of smart-city construction, IoT and location-based services.
Orolia, through its Orolia Defense & Security business, announced in November 2020 the launch of M-code military GPS receivers in its line of positioning, navigation and timing (PNT) solutions.
The line includes M-code-enabled mobile mission timing and synchronization platforms, such as the SecureSync IDM resilient time and frequency reference solution, the first time server approved by the Defense Information Systems Agency (DISA), and the Versa mobile PNT platform to meet rugged size, weight, power and cost (SWaP-C) requirements.
M-code is a military signal used in the L1 and L2 GPS bands. It is required by congressional mandate for U.S. Department of Defense (DOD) military operations.
M-code is designed to enhance PNT capabilities and improved resistance to existing and emerging threats to GPS, such as jamming and spoofing. Operational benefits of M-code include:
a higher power signal that offers improved resistance to jamming and interference
advanced security features to prevent unauthorized access or exploitation
improved message formats and signal modulation techniques for faster and more accurate performance.
Orolia has long supported the DOD’s need for selective availability anti-spoofing module (SAASM)-enabled PNT equipment, explained Hironori Sasaki, president of Orolia Defense & Security. “This announcement emphasizes our move toward M-code and the availability of M-code in our products,” Sasaki said. “Our focus has always been on staying in sync with the DOD and providing the latest and greatest technologies.”
Orolia now supports M-code in all its user products and offers two capabilities: simulation and M-code-enabled end-user devices. “They will each have a different approval process for export,” Sasaki said. “We follow DOD guidance on getting that capability out there.”
SecureSync, which is SAASM-enabled, has been deployed with DOD for many years, so Orolia has “a very good install base” of these devices, according to Sasaki. “We are providing a very easy and seamless upgrade path to go from SAASM to M-code in that platform.” The company’s Versa platform consists of the VersaSync and the VersaPNT, both small form-factor PNT devices designed for rugged application in military vehicles or military aircraft.
DOD has given Orolia approval to advertise the fact that it has these capabilities in its products. “We are expecting shipments to start in early 2021,” said Sasaki. “So, we are well on our way in development, implementation and productization.”
“We have been focusing on providing products that have a modular architecture, both in software and hardware,” Sasaki added. “We are embracing this approach of open architecture and continue to support the DOD in providing different layers of sensing and PNT protection in a way that can be incorporated into future DOD systems.
“We have already demonstrated our ability to deliver PNT solutions in various form factors, so I think we are in a good position to continue pushing forward with that open architecture approach,” Sasaki said.
Antenna development, going all the way back to the first antennas, has been one of continuous innovation,” Richard Langley wrote in our September issue. Even after more than 30 years of GNSS technology development, he pointed out, GNSS antenna development continues.
His statement is borne out by the responses submitted by manufacturers of GNSS antennas to four questions we posed to them:
What specific challenges are your antennas designed to address?
Over the past three years and the next three years, what have been/will be your key innovations?
How are advances in real-time kinematic (RTK) and precise point positioning (PPP) changing requirements for GNSS antennas?
What technical challenges or industry trends do you find most interesting or noteworthy?
The responses display a wide range of antenna designs for a wide range of applications. They show how manufacturers must constantly balance requirements for positioning accuracy, form factor, interference management and cost. For the GNSS user segment, antennas are the first link in the processing chain and the first line of defense against jamming, spoofing, multipath and, increasingly, adjacent band interference. Antenna designers are also challenged by the growing adoption and sophistication of RTK, PPP and similar technologies. All these variables, challenges and scenarios are reasons for the constant evolution of GNSS antennas.
Finally, it is not always obvious whether a device should be classified as a receiver or an antenna. For example, what Harxon calls a “smart antenna” others might call a receiver.
Specific challenges
NovAtel antennas enable exceptional tracking for multi-constellation precision and are packaged for practical use in the field. Our antennas are designed to be the first link in the processing chain to deliver centimeter-level precision in harsh operating environments and applications, including contested or crowded RF environments through our CRPA antennas.
Key innovations
Over the past three years, we have focused on multi-frequency support and simultaneous L-band reception (seen in the NovAtel GNSS-850) to provide exceptional positioning solutions and support future technology like RTK From the Sky. Optimized to work with OEM7 receivers, NovAtel antennas leverage patented multi-point feeding networks to providΩe symmetric radiation patterns across all frequencies for excellent multipath rejection and minimal phase-center variation and offset. In the next three years, we expect to further reduce the size of antennas needed in a resilient high-precision solution. At the same time, we are continuing to improve robustness to adjacent band interference. We work to optimize the full GNSS ecosystem, from the signal in space reaching the antenna, to the final position, velocity and time (PVT) solution exiting the receiver.
Anechoic chamber testing. (Photo: NovAtel)
Advances in RTK and PPP
Advances in corrections expose measurements from low-quality antennas. You need an antenna with sub-millimeter phase-center variation (PCV) accuracy and stability on par with the algorithms delivering centimeter-level solutions. When the processing chain eliminates errors down to the centimeter level (or less), you must avoid adding errors from unstable phase centers, for example.
Technical challenges and industry trends
A difficult challenge facing the antenna industry is the commercial demand to reduce the size and weight of antennas while maintaining functionality and performance. The industry will need to continue balancing between size and performance while producing innovative GNSS antenna solutions integrated with other technologies, for example with anti-jam capabilities.
Harxon
With Leo Wang, Product Technical Director
Specific challenges
The design of Harxon’s GNSS antennas aims to achieve a perfect balance between easy integration with RTK solutions and the ultimate product performance by meticulously dealing with wideband, positioning accuracy, form factor, and interference management.
Key innovations
Over the past three years, our signature antenna innovation is our 4-in-1 X-Survey HX-CSX100A multifunctional GNSS antenna, which integrates a GNSS antenna, 4G, Bluetooth and Wi-Fi in one compact enclosure. This multifunctional antenna simplifies receiver integration into an RTK solution and facilitates industry development. In the next three years, Harxon looks forward to more breakthroughs in positioning technology and delivering pragmatic innovations.
Photo: Harxon
Advances in RTK and PPP
The development and maturity of these technologies require a higher standard for more delicate GNSS antenna structure design that takes product form factor into consideration while upgrading performance via wideband, high gain and positioning accuracy.
Technical challenges and industry trends
The 5G era has arrived, and the application of 5G technology for the internet of things (IoT) is extensive. China has also proposed the integration of 5G technology and BeiDou. We believe that, in the next few decades, GNSS positioning and 5G technology will be widely applied in the IoT industry and create huge benefits.
Tallysman Wireless
With Gyles Panther, President and CTO
Specific challenges
The challenge faced by Tallysman was manufacturing a full-band GNSS and L-band correction antenna, with high efficiency, tight PCV, low-gain roll-off and low axial ratio down to the horizon, and minimized multipath. Plus, a narrowly filtered low noise amplifier (LNA) to mitigate interference, all in the smallest possible package.
Key innovations
Over the past three years, Tallysman has released the VeraChoke, helical and VeroStar lines. The VeraChoke serves the geodetic and survey reference station markets with PCV and full-band GNSS coverage.
Our helical GNSS and Iridium antennas are lightweight, compact and robust. They provide a precise phase center and radically reduced dependence on a ground plane because of their differential mode of operation. Their exceptional low weight makes them an excellent choice for copter-style UAVs.
Photo: Tallysman
The patented VeroStar element combines full coverage of the upper and lower GNSS bands, plus L-band corrections service, with reception of L-band downlink Mobile Satellite Service (MSS) signals and exceptional low elevation angle reception. It is rugged, compact and lightweight — ideal for land and marine rover applications. It also provides minimal and symmetric PCV with outstanding all-around performance.
Advances in RTK and PPP
Both correction systems require rover receivers to phase-lock on low-amplitude GNSS satellite signal carriers, and both are hugely dependent upon the GNSS antenna. The corrections are critical for precision agriculture and land survey applications. Our precision antennas are specifically designed to minimize phase-lock loop (PLL) cycle slips.
Technical challenges and industry trends
Interference, accidental or intentional, is a major challenge and threat to GNSS, particularly from encroaching L-band 5G cellular systems. Tallysman offers tightly filtered LNAs and single-band omnidirectional anti-jam antennas with a deep null at low elevations. We plan to introduce a new multiband omnidirectional antijam antenna in the second quarter of 2021.
Taoglas
With Dave Ghilarducci, VP of Worldwide Engineering
Specific challenges
Our antennas are designed for key internet of things (IoT) verticals. Our high-precision, multi-band GNSS antennas offer centimeter-level positioning and timing accuracy for applications where small size and high performance are required. We address the industry’s most compact form factors with out-of-band rejection for operation near transmitters.
Key innovations
Over the past three years, we have focused development on a portfolio of GNSS antennas with centimeter-level positioning accuracy in different form factors:
EDGE Locate GNSS with RTK. (Photo: Taoglas)
lighter, more robust antennas through our patent-pending Terrablast-based products (the GGBTP.35); which are impact resistant and 35% lighter than traditional ceramic patches
high-rejection internal patch modules for rejection for OEM integrations (AGGBP.SL and AGGBP.SLS series)
surface-mount active patch antennas with embedded active circuitry for easier integration (ASGGB Simplicity series)
off-the-shelf module with an integrated multi-band RTK antenna, electronics and receiver technology for ease of integration.
Over the next three years, we expect to expand our portfolio and support additional bands like E6, L6 and the L-band correction band. Plus, we are working with the European Space Agency to design IoT devices with integrated high-precision RTK and GNSS technologies.
Advances in RTK and PPP
Expansion of RTK, PPP and similar technologies into new domains has demanded better performance from mainline and OEM antennas. These correction technologies stress antenna gain and polarization purity to maximize signal strength. We address these issues in our integrated designs to mitigate multipath errors and maximize ease of integration.
Technical challenges and industry trends
The release of lower-cost multi-band receivers and modules could be the most significant shift the GNSS industry has seen in the last decade. This innovation is already expanding applications and challenging suppliers to provide better performance for size, weight and cost.
Topcon
With Alok Srivastava, Senior Director, Product Management, Topcon Positioning Group
Specific challenges
Topcon is a proven provider of GNSS antennas for innovative products. Our GNSS product portfolio offers antennas with excellent multipath mitigation, near-band interference rejection, and quality signal tracking from zenith to the horizon. We strive to provide affordable solutions for our geodetic, machine control and agricultural customers.
Key innovations
Topcon antenna technology is applied within standalone antennas along with integrated GNSS receivers. Antennas inside our integrated receivers, such as the HiPer HR, are distinctive in supporting Bluetooth and Wi-Fi in a common antenna stack without sacrificing GNSS tracking and positioning performance. These offerings also support compact designs of integrated receivers.
As the number of GNSS constellations expands and new communication methods become available, potential inference from neighboring signals grows with congestion of the RF spectrum. Our standalone antennas, PN-A5 and CR-G5 with cavity filter option, uniquely address these challenges.
In the coming years, antenna technology will need to stay strongly focused on interference rejection and mitigation, lower cost and smaller size. These demands challenge antenna providers to make technical advancements while investing in cost-sensitive manufacturing along with higher testing standards. In this regard, our new antenna test facility in Concordia sulla Secchia, Italy, will soon be offering robotic calibration services.
Advances in RTK and PPP
With increased demand and services available for PPP, Topcon antennas support both GNSS and L-band frequencies, such as in the HiPer VR/HR receivers, and standalone antennas (PG-F1, G5-A1, PN-A5 and CR-G5). As data communications continue to expand beyond L-band and RTK/network RTK, Topcon systems will support them without compromising positioning performance.
Technical challenges and industry trends
As GNSS antennas are one of the integral items within the GNSS system, the significance of delivering a cost-effective and miniaturized solution that provides robust positioning is critical to meeting needs in ever-growing precise positioning markets and applications. Topcon will continue to emphasize innovative antenna products through our research.
Trimble
With Stuart Riley, Vice President of GNSS Technology
Specific challenges
Each application has different requirements. For applications that require the highest position accuracy, the stability of the phase center, multipath mitigation, and the unit-to-unit production consistency are critical.
Some markets require high performance, and often in challenging environments such as high vibration experienced on construction equipment. Other customers require smaller, lower cost antennas and can tolerate a slight accuracy reduction.
The antenna is typically a combination of a passive antenna element with an active low-noise amplifier (LNA). The LNA needs to be carefully designed to remain linear in the presence of in-band jamming while rejecting out-of-band signals.
Key Innovations
For high-precision applications, Trimble first released the Zephyr series of antennas in the late 1990s. This antenna provides excellent phase center stability and unit-to-unit production repeatability; the antenna has exceptional multipath mitigation performance, which is enhanced in the geodetic version.
Since the Zephyr was first introduced, we have added support for additional GNSS systems and RF bands (L1/E1, L2, L5/E5 and L6/E6), transitioned to a RoHS-compliant manufacturing process, improved the LNA performance, developed rugged versions for construction vehicle mounting, and produced a smaller version used in the Trimble R10, R12 and SPS986 GNSS receivers.
More recently, we developed a lower cost high-performance antenna for the Trimble Catalyst software-defined GNSS receiver for Android phones and tablets. We also introduced an antenna in the Nav-900 guidance controller for agriculture that implements a meta-material design.
Looking forward, we will continue to innovate by providing antennas optimized to meet the needs of the markets, including cost, performance and morphology. Enhancements will include novel antenna architectures, production technique improvements, and careful material selection.
Advances in RTK and PPP
Applications for GNSS are expanding to include more non-technical users, and the markets are calling for small, light and low-cost antennas — especially for technologies like PPP and positioning products such as Catalyst. These requirements extend across all arenas, especially in applications served by RTX. The needs must be balanced against increased technical demands stemming from the expansion in GNSS bands supporting new frequencies and signals, including PPP correction data.
Technical challenges and industry trends
The challenges come in balancing seemingly conflicting needs for performance, size, weight and cost for the various applications.
Because Trimble focuses on specific user segments, we can provide antenna solutions that are the best fit for the various applications. For example, an antenna in a handheld device must be small and lightweight; however, on a construction machine, durability takes precedence over size and weight.
As in January 2020, we are starting the year by providing insights from manufacturers of GNSS receivers. We asked these industry leaders to look back at the past two years and forward at the next two, and discuss key innovations in the following areas:
utilizing Galileo and BeiDou
dealing with jamming and spoofing
integration with inertial measurement units (IMUs) and other sensors
positioning using cell phones and other consumer devices
any other areas or challenges they find particularly significant
Photo: Emma Hardy/Eos Positioning Systems
The single most important trend that emerges from manufacturers’ responses is the improvement in receiver performance due to the increase in the number of satellites (now 150) and signals (now more than 100). With four usable constellations, GNSS is now a reality. Multi-constellation receivers are quickly becoming the norm, even in consumer devices, and new user segments are benefiting from satellite-based PNT. Already, some smartphones and tablets are achieving decimeter-level or even centimeter-level accuracy. Over the next two years, new GNSS services will become available and, as the GNSS constellations continue to develop, the availability, reliability and repeatability of their signals will improve further.
A second important trend is the growth in satellite-delivered correction data, which substantially lowers the entry barrier for high accuracy applications by obviating the need for costly local infrastructure. This is starting to change the traditional cost-benefit calculation regarding real-time kinematic (RTK) vs. precise point positioning (PPP) corrections (see also our Editorial Advisory Board PNT Q&A).
A third and continuing trend is the increasing threat from intentional and unintentional jamming and interference across the globe, paralleling the increasing ubiquity of GNSS and potentially impacting most users. Therefore, receiver manufacturers continue to improve hardware and software techniques to defeat, or at least mitigate, this threat, greatly assisted by the increase in the number of available signals.
Finally, as automakers and high technology companies continue their efforts to develop autonomous vehicles (aka “self-driving cars”), the concept of GNSS integrity is getting renewed attention. Here, too, the increase in the number of available signals is extremely helpful.
With François Martin, Vice General Manager, International Division
Utilizing Galileo and BeiDou
The addition of Galileo and BeiDou to GPS and GLONASS not only extends GNSS positioning to more obstructed environments, but also allows the use of new survey methods, such as the hybrid IMU-GNSS pole-tilt compensated surveying and stakeout with survey-grade accuracy. Further expansion of GNSS navigation systems will result in even greater availability, reliability and repeatability.
Dealing with jamming and spoofing
As an integrator and developer of GNSS systems, we focus our design on strong electromagnetic shielding and sealed isolation chambers. From a technology standpoint, the combination of advanced GNSS signal processing, optimized antenna design, and advanced filtering ensures minimal interference.
Photo: CHC Navigation
Integration with IMUs and other sensors
The integration of interference-free, high-dynamic IMU fused with GNSS technology brings an obvious benefit to surveying and autonomous navigation applications. The latest algorithm developments make it possible to get rid of tedious initialization processes, increase the productivity of typical survey tasks, bring extra safety to operators, and compensate for transient GNSS outages.
Positioning with consumer devices
Multi-constellation GNSS chips are accelerating the development of untapped user segments, but the repeatability of position accuracy remains an issue. The integration of high-performance GNSS chips and helical antennas as high-precision add-on modules on smartphones and tablets enables centimeter- or decimeter-level accuracy. This democratization of technology is increasing earlier adoption of GNSS technologies by a broader user base.
Eos Positioning Systems
With Jean-Yves Lauture, Chief Technology Officer
Utilizing Galileo and BeiDou
The past two years have seen considerable maturation of the Galileo and BeiDou constellations. Considering the now four usable GNSS constellations and the aggressive launches of Galileo and BeiDou, the number of available satellites and the list of frequencies they use have considerably increased. Accuracy itself is slightly improving with the availability of BeiDou phase 3 signals, whereas performance and productivity experience a significant boost under tougher conditions with more satellites and stronger signal availability. It is not uncommon for our customers to use 30 to 35 satellites out of 40+ in view using an Arrow Series GNSS receiver. We are waiting for the availability of the High Accuracy Service (HAS) (PPP) on the Galileo E6 frequency, hopefully in a couple of years.
Photo: Eos Positioning Systems
Integration with IMUs and other sensors
Eos has put a lot of effort recently in supporting external sensors and accessories to facilitate mapping of certain types of assets or mapping in certain types of conditions. For instance, this past year Eos released our underground mapping solution called Eos Locate for ArcGIS (see cover photo), which integrates with external utility locate devices to allow a user to precisely map buried assets. Eos Laser for ArcGIS interfaces with laser rangefinders to map assets in GNSS-impaired environments.
Positioning using consumer devices
With our bring-your-own-device (BYOD) approach on the market to support high-accuracy data collection for GIS, we have made it possible to override the consumer devices’ locations with accuracies down to the centimeter from our Arrow receivers. Customers can use any of their cell phones or tablets and immediately start mapping with submeter or centimeter accuracy.
Hemisphere GNSS
With Kirk Burnell, Senior Product Manager
Utilizing Galileo and BeiDou
The Galileo and BeiDou phase 3 systems introduce modern signal structures that allow more accurate measurements to be made than GPS first introduced. The new signals and increased satellite count are significantly improving receiver performance. Our Phantom and Vega product lines harness these new signals.
Dealing with jamming and spoofing
The increasing number of incidents of intentional and unintentional jamming and interference across the globe has impacted nearly every type of GNSS user. Our Cygnus interference mitigation technology automatically detects and mitigates the interference in real time, as well as providing spectrum analysis of the GNSS signal bands.
Photo: Hemisphere GNSS
Integration with IMUs and other sensors
Today’s autonomous-focused environment increases the need to share data across platforms. Both Vector and Vega provide robust GNSS heading, position and velocity to marine, machine control, UAV and internet of things (IoT) integrators, helping augment their sensor data.
Positioning with consumer devices
Positioning in consumer products will continue to drive innovation, while chasing accuracy and precision requires a strong understanding of geodesy fundamentals. As design requirements push well beyond the limits of what consumer GNSS delivers, and with the help of our knowledgeable staff, our precision receivers are delivering reliable performance in some very impressive applications.
Other significant challenges and opportunities
New GNSS signals and new surrounding technologies continue to come online, and the RF environment continues to see increased activities. Our underlying Lyra II ASIC technology and Cygnus enable our Phantom and Vega integrators and users to reliably coexist with these changes.
Hexagon | Novatel
With Sandy Kennedy, Vice President Innovation, Hexagon’s Autonomy & Positioning division
Utilizing Galileo and BeiDou
GNSS is now reality, not just inclusive phrasing to replace GPS. We are well into the era of multi-constellation receivers, and users will notice distinct improvements in solution availability with the addition of Galileo and BeiDou measurements. Over the next two years, we expect users in a variety of applications to start exploiting our globally available, fast-converging RTK From the Sky technology, which is enabled by the addition of quad-frequency signals supplied by Galileo and BeiDou (see page 29).
Dealing with jamming and spoofing
The RF spectrum is crowded and will only become more crowded over time. In 2020, we introduced our GNSS Resilience and Integrity Technology (GRIT), a suite of firmware options for the OEM7 receiver family. In addition to interference detection and mitigation, GRIT adds spoofing detection and time-tagged digitized samples for advanced situational awareness of the RF spectrum. With GRIT’s spoofing detection, opponents can try to spoof us. But fool us? Not a chance.
Photo: Hexagon | NovAtel
Integration with IMUs and other sensors
IMUs have become more accessible to more applications due to size, weight, power and cost reductions. At the same time, our algorithmic capability has significantly advanced to use lower quality inertial measurements for greater benefit. Originally reserved for truth systems, high-end mapping, and aerospace and defense applications, GNSS+INS solutions are now available in products like our SMART7 line of smart antennas for precision agriculture applications. Closer integration of the inertial and GNSS processing will bring further benefits in hostile RF or just plain difficult positioning environments. There is no perfect single sensor, but you can get more accurate by combining a set of sensors that offset each other’s vulnerabilities and limitations.
Positioning with consumer devices
The general population is accustomed to looking at their smartphone to see not only their location, but also the size of the “blue dot” of positioning uncertainty that accompanies it. We have always said accuracy is addictive, and we will no doubt start to see consumer demands for smaller blue dots with increasingly accurate positions. Making the digital reality match our real world demands continuously available and reliable positioning. Being lost is a terrifying feeling, especially for those who have been staring at their phone for the past 30 minutes and have no recollection of the physical world through which they have passed.
Other challenges and opportunities
The transition to autonomous vehicles, for both on-road consumer and off-road industrial applications, is inevitable. It is becoming increasingly necessary to prioritize the development of functional safety and integrity requirements to achieve the safe operations of autonomous systems. These requirements are necessary and entirely non-trivial to develop.
Photo: Stephen Drake
Javad GNSS
With the Javad GNSS Team
Utilizing Galileo and BeiDou
Simultaneous RTK and PPK processing of all available GPS, GLONASS, Galileo and BeiDou signals in receivers powered by our 874-channel TRIUMPH chip has resulted in significant productivity gains. User Darren Clemons told us “These Plus units are at least 40%–50% faster… The combination of the four super engines and the RTPK is unbeatable. You can get an accurate shot just about anywhere.”
Dealing with jamming and spoofing
Usually, more than 100 signals are available at any given time, and we need only a small number to compute a position. By tracking and verifying all these constellations and their signals, it is extremely unlikely that we can be spoofed without our knowledge. Javad GNSS receivers will immediately recognize spoofing and take corrective actions. Spoofing protection is available on all Javad GNSS receivers and OEM boards.
Integration with IMUs and other sensors
The Javad GNSS engineering team relentlessly works to identify and integrate the latest sensor technologies that can boost productivity. Our TRIUMPH-LS’s integrated camera sensor has for years supported onboard photogrammetry, and now our TRIUMPH-3 receiver’s integrated IMU provides high-precision tilt compensation.
Other challenges and opportunities
Our innovative RTPK feature is improving GNSS surveying and monitoring. Our Triumph-LS and Triumph-3 RTK rover systems combine the strengths of RTK and PPK into a system that can post-process RTK data and verify its results in parallel and real time. Users get the best of both worlds. If RTK fails, RTPK comes to the rescue in a fraction of a second.
Septentrio
With Gustavo Lopez (pictured) and Stef van der Loo, Market Access Managers
Utilizing Galileo and BeiDou [GL]
With 150 GNSS satellites in space, multi-constellation has been a natural transition for improved GNSS availability. We see this in rover applications and in upgraded reference networks modernizing correction services. The next two years will be transcendent as constellations finally start delivering new services. We see our products soon integrating
GAL-OSNMA for anti-spoofing and then moving to new high-accuracy services.
Dealing with jamming and spoofing [GL]
We have witnessed a large increase in jamming and spoofing events as GNSS ubiquity increases. Users are becoming conscious of this, yet many integrations are still using vulnerable receivers, and we see manufacturers falsely claiming to have proper resilience. Septentrio’s AIM+ technology uniquely mitigates all these risks, and users come to us for expert advice on this area. In the coming years, we expect further receiver innovations and developments in adjacent technologies.
In 2020, Septentrio opened an R&D center in Espoo, Finland. (Photo: izhairguns/iStock/Getty Images Plus/Getty Images)
Integration with IMUs and other sensors [SVL]
Integration of sensors and sensor fusion moved from the research stage to the major production and adoption phase as an element in autonomous systems. Using a GNSS/INS (see our AsteRx-i products) is crucial for various applications — for example, being able to work in difficult environments — and for vehicle orientation. The development of lower cost IMUs while keeping high performance will enable a shift in focus from hardware to software. This will result in multi-sensor technology that is better scalable, easier to use, and more stable to integrate in relation to a full system with various sensors.
Positioning with consumer devices [GL]
We see further integration of dual-frequency GNSS chipsets in mobile technology for increased accuracy, which is key for future consumer applications. Septentrio has also witnessed the important involvement of telecom operators in GNSS correction services. Septentrio products (such as the PolaRx5 or AsteRx-SB) are deployed on new generation networks as operators prepare for the new generation of positioning in cell technology.
Other significant challenges and opportunities [GL]
Two areas are emerging thanks to the autonomy era and due to further regulations in the market. The first is the concept of GNSS integrity, which has a strong link to the reliability of autonomous solutions. The second is security, which, beyond anti-spoofing, is linked to the cybersecurity of GNSS systems as the demand increases for the protection of electronics and software.
Trimble
With Stuart Riley, Vice President of GNSS Technology
Utilizing Galileo and BeiDou
Most Trimble precision receivers can utilize any combination of GNSS satellite constellations (GPS, GLONASS, Galileo, BeiDou and QZSS) to deliver centimeter accuracy and optimize performance, even in degraded conditions. Users can select the constellations they want the receiver to use.
Dealing with jamming and spoofing
Spoofing is rare and low risk in locations in which Trimble’s precision GNSS agriculture, construction and geospatial customers operate. However, to protect users, modern Trimble Maxwell-based GNSS receivers implement hardware- and software-based techniques to detect and mitigate spoofing. Jamming sometimes impacts customers, but is not their primary challenge. The same issues are still present today as they were in the early days of precision GNSS. The main productivity concerns remain related to multipath and problems around obstructions and trees. Trimble continues to improve our GNSS systems’ robustness with advances in processing algorithms and hardware enhancements such as integrating inertial technology.
Trimble SiteVision uses Catalyst and augmented reality to preview a new housing development in an open field. (Photo: Trimble)
Integration with IMUs and other sensors
The Trimble R12i and SPS986 represent Trimble’s third-generation receivers (preceded by the R10 and the R12) capable of integrating inertial measurements into 3D GNSS positioning. In addition to speed and convenience for the user, integration with IMU provides immunity to magnetic interference and real-time integrity monitoring.
With the introduction of the Trimble R12 with the ProPoint GNSS positioning engine, we significantly improved the performance in challenging environments. This was further enhanced with the addition of an IMU for tilt compensation in the R12i. The new solution provides a system that delivers more accurate results in more places and in less time.
Positioning with consumer devices
The Trimble SiteVision augmented reality solution and Trimble Catalyst GNSS receiver operate on Android devices. Trimble Catalyst technology provides a software-defined GNSS receiver capable of survey-grade accuracy. Catalyst is the ideal solution for third-party applications that benefit from precise real-time positioning. Trimble SiteVision combines Catalyst positioning with augmented reality to deliver real-time, on-site visualization of proposed structures and existing underground assets.
Other significant challenges and opportunities
An ongoing challenge in GNSS positioning is the ability to obtain positions with suitable accuracy when and where they are needed. Solutions such as RTK and VRS provide solid performance at local and regional levels. Today, these technologies are complemented by subscription-based Trimble RTX positioning services, a global approach that uses a network of GNSS tracking stations and satellite-delivered correction data to achieve required accuracies. In 2020, coverage for Trimble CenterPoint RTX Fast, which enables users to achieve two-centimeter or better accuracy with initialization time of less than one minute, was expanded to cover the continental United States as well as much of Canada and Western Europe. The CenterPoint RTX Fast network now covers more than 5 million square miles worldwide. Trimble RTX coverage enables global users such as farmers, land surveyors and GIS professionals using RTX-capable receivers, to untether from the cost and complexities of GNSS base stations. In addition, the service offers a single, continuous corrections network ideal for enabling a broad range of safety-critical autonomous applications in markets such as automotive, agriculture and construction.
For the past decade, widespread deployment of autonomous vehicles (AV) has been just over the horizon — that imaginary line that recedes as you approach it.
It has been delayed mainly by technical issues, which will eventually be followed by legal and regulatory ones, mainly regarding liability, and by a struggle to gain public acceptance. When they finally reach the mass market, however, AVs will reduce traffic fatalities by at least an order of magnitude because they do not get distracted, drunk, drowsy or enraged and are much better able than humans to gauge distances and speeds.
Additionally, they will be able to communicate with each other and with the infrastructure, which will not only further improve safety but also reduce congestion and fuel consumption via the adoption of techniques such as convoying.
Logically, even if AVs only somewhat reduced traffic fatalities (about 38,000 per year in the United States), the public should welcome them with open arms. In reality, though, the reaction to even a single death caused by an AV — like the one in Tempe, Arizona, in March 2018 — can set AV deployment back years.
Therefore, car manufacturers are challenged to develop AVs that can navigate extremely safely in a wide range of traffic, road and weather conditions. For more than a century, human drivers have routinely managed sudden obstructions, poor visibility and dangerous behavior by other drivers that still bedevil their new robotic counterparts, despite the sensors, microprocessors and algorithms at their disposal.
The primary technological obstacle to widespread deployment of AVs on roads is “the complexity of the system and the amount of time that it takes to develop a functionally safe autonomous vehicle,” said Steve Ruff, general manager of Trimble’s On-Road Autonomy Division, which develops positioning solutions for autonomous vehicles that operate on public roadways. He cites the time required to develop “a comprehensive, safe, autonomous vehicle technology stack” and points out that “we are on the verge of going from level two to level three, which requires the driver to stay engaged in the driving experience in case the autonomous system has a problem.”
Multiple sensors
While AV developers are exploring different ways of obtaining reliable sub-centimeter positioning accuracy, all generally rely on collecting data from multiple sensors on the vehicle and applying an algorithm to synthesize the data in real time and generate a continuous, accurate position. Computer vision, radar and lidar play important roles in an AV by perceiving its surroundings and localizing it to an a priori map. This functions well in feature-rich urban environments, but can degrade in sparse highway settings.
Radar has good ranging accuracy, but is unable to detect and recognize traffic signs and road markings. Lidar has even greater ranging accuracy but is challenged in featureless areas, such as straight highways and country roads. Digital cameras are good for detecting objects and navigating in tunnels and urban canyons, but, like lidar, are less effective on featureless roads and in low visibility conditions (rain, fog, darkness, snow, sun glare).
Plus, they are challenged by the absence of road markings or the presence of construction. Inertial navigation systems (INS), while excellent at compensating for brief GNSS outages, can only guide vehicles for short stretches due to their inherent drift. (INS are essential on aircraft and vessels, whose attitude is constantly changing, but that is not relevant for vehicles, which travel essentially flat relative to, and at a constant distance from, the road surface.)
GNSS and Corrections
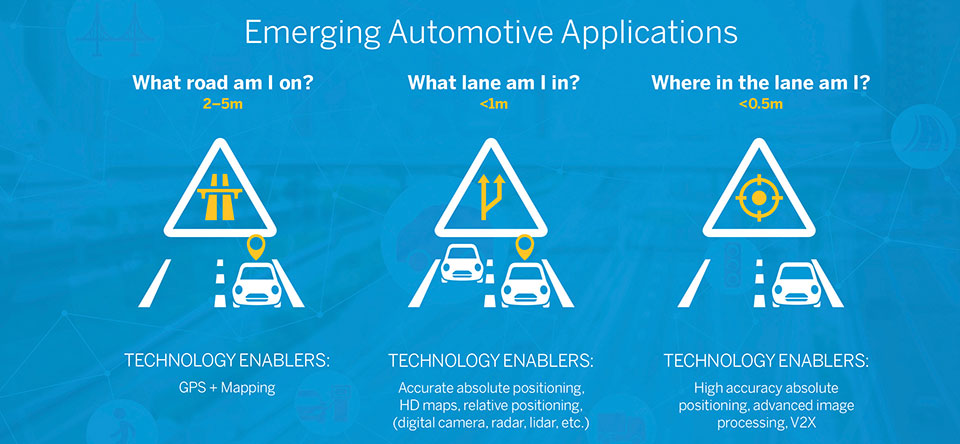
Satellite navigation plays a central role in an AV. At a minimum, it guides it from a trip’s origin to its destination, including stops or waypoints in between, the same way it would advise a human driver. It also continuously alerts the vehicle to upcoming stops, slowdowns, turns, congestion and other challenges that are already mapped—whether long in advance by map makers or moments earlier via crowdsourced updates. Finally, if sufficiently accurate, it can steer the vehicle to keep it in the center of its lane and to make smooth lane changes and turns. Determining on which road a vehicle is requires an accuracy of less than 5 meters; determining in which lane it is requires an accuracy of less than 1 meter; and determining where in the lane it is requires an accuracy of less than 0.5 meters.
Two kinds of GNSS corrections are commonly used for AVs: real-time kinematic (RTK) and precise point positioning (PPP). RTK, which is generally accurate to the centimeter level, relies on ground-based reference stations at fixed, surveyed locations that process and transmit error-corrected signals to receivers within a 10- to 20-kilometer range, typically in real-time via a cellular link. PPP, which is accurate to the tens of centimeters, uses a global network of ground stations to generate an accurate signal, and transmits it to subscribers via the internet or geostationary satellites. However, the receiver in the vehicle needs 20 to 60 minutes to align with the PPP signal before it can rely on it.
Both RTK and PPP are established in industries such as mining, construction and precision agriculture, where vehicles operate in controlled environments with little or no traffic. AVs on public roads present a far greater challenge. A car’s typical range far exceeds that of any RTK base station, and base stations can also have down time, while in-vehicle systems must use multi-frequency receivers to reduce the convergence time of the PPP signal. In case of outage of either the GNSS signal or the correction signal, the vehicle’s system must rely on data from its other sensors and recover swiftly from the error state.
Trimble’s RTX is road ready
The first PPP service in commercial use for passenger vehicles is Trimble’s RTX, which provides real-time, centimeter-level positions via IP/cellular connection or satellite broadcast worldwide. It delivers positioning via satellite to GM’s Super Cruise, a hands-free driver assistance feature for use on limited access freeways.
“We’re GNSS receiver-agnostic,” said Steve Ruff of Trimble’s On-Road Autonomy Division. “We’ll use any receiver that’s preferred by the OEM building the AV.”
Image: Trimble
Trimble, he recalled, became GNSS agnostic with regard to automotive navigation nearly 15 years ago, when it decided to get out of the commercial-grade or consumer-grade GNSS business. “It has worked out quite well, because not only can we meet the quality costs and performance targets of our OEM customers, it also allows us to do what we’re good at. We can take our positioning solution, adapt it to work with any measurement engine, and put together a solution that fits the OEM’s requirements just right.”
Automotive companies, Ruff explained, generally have certain requirements for the GNSS receiver, including certain standards for application-specific integrated circuits (ASIC) and automotive safety integrity level (ASIL), as well as meeting their accuracy requirements. “So, if the receiver has suitable code and carrier phase measurements that can support their accuracy level, then that will be the third requirement for the receiver for the automotive segment.”
For off-road vehicles for agriculture, construction and mining, Trimble only uses its own receivers, said Thomas Utzmeier, general manager of the company’s Off-Road Autonomy Division. Their requirements center on precision, position availability in challenging environments, and integrity of the position. “In the use cases on which we are working,” Utzmeier said, “we certainly see sub-decimeter accuracy. We are targeting probably three, four, sometimes five centimeters.” In more challenging use cases, GNSS plus sensor fusion — including INS and optical data — maximizes position availability and accuracy, he explained.
For the on-road segment, Ruff’s division offers a “positioning stack” that includes corrections, the GNSS position algorithm and inertial fusion. “Then we provide services to help the OEMs take our software and integrate it on the platform of their choice.”
As the skipper of Galileo 4, a 50-foot sailboat on the Columbia River, I instruct my crew to alert me if the water under the keel drops below 10 feet and take immediate action if it drops below 5 feet, because I cannot constantly monitor my chart to avoid running aground. Yet, the huge cargo ships that navigate the river for 100 miles from its mouth at Astoria to the Port of Portland sometimes have as little as two feet of vertical clearance.
This feat of navigation is made possible by the knowledge, experience and electronic equipment used by the river pilots who steer the ships, the hydrographers who survey the river, and the dredge operators who perform the Sisyphean task of maintaining the required depth of the navigation channel. Each additional inch of draft they enable allows a ship to carry additional cargo worth up to several million dollars.
In similar ways, marine professionals around the world cooperate to chart ocean bottoms and to keep ports, harbors and navigable waterways safe for the more than 90% of trade that is carried by ships. Additionally, off-shore installations—such as fiber optic cables, pipelines, drilling platforms and wind turbines—all require accurate surveys of the ocean floor. Finally, population growth in coastal areas and sea level rise due to climate change are driving the need for bathymetric data for planning and emergency management.
Bathymetry
For centuries, mariners recorded water depth using nothing more than a lead line, a compass, a sextant and a rudimentary nautical chart. This was such a time-consuming process, however, that they could only perform it for a tiny percentage of the world’s oceans and coastlines. Today’s technology makes the process not only more accurate, but also vastly more efficient.
In deep waters, depth data is collected using huge multi-beam echo sounders (MBES) that operate at very low frequencies. As the depth decreases, smaller devices are used that operate at higher frequencies and, therefore, have higher resolution. However, close to shore, the efficiency of these devices drops dramatically, as the cone of their sound signal is cut off by the slope of the shelf. This is where airborne lidar sensors become a much more efficient means of collecting depth data.
In addition to data from the sounders, bathymetry requires data about the vessel’s location and attitude. The former, an obvious requirement for any kind of mapping, are collected by differential GNSS receivers. The latter, collected by an inertial measurement unit (IMU), are used to compensate for variations in the depth measurement depending on the vessel’s rotational movements (roll, pitch and yaw) and translational movements (heave, surge and sway). This is the same reason that aerial photogrammetrists use IMUs on aircraft.
Challenges
Traditionally, MBES systems have been large, complex and expensive. However, they are rapidly becoming smaller, cheaper, quicker to deploy, and easier to use thanks in part to the introduction of inertial systems that use microelectromechanical systems (MEMS), said Ludovic Bazin, technical support manager for SBG Systems, which specializes in MEMS technology. “You can see that the new systems are being increasingly deployed in smaller autonomous vehicles, on smaller autonomous surface vessels (ASV), and even smaller vessels. So, people can go quickly in operation,” he said. An additional advantage, he pointed out, is that they do not require an export license.
A key to accurate bathymetric surveys is reducing the error budget aboard the vessel, where the survey positions are tied back to a GNSS antenna. “You have errors all the way through the system,” said Richard Turner, vice president of global marine sales for Hexagon’s Autonomy & Positioning division, which caters mostly to the market for survey related to oil and gas. He attributes the largest improvements in recent years to the increase in accuracy using precise point positioning (PPP). “If you are out of range of real-time kinematic (RTK) and any other near-shore positioning, the accuracy of PPP is constantly improving,” he said. “It is getting down into the five-centimeter range horizontal or better than that.”
Turner also pointed to the tight integration of inertial navigation system (INS) technology with other systems. “Every time you improve the accuracy of your system the specs go up,” he said. Therefore, the challenge is to ensure that the equipment is installed properly, which requires very accurate offset measurements. “It is no good having two centimeters position accuracy if your heading or your offsets are wrong.” Generally, he points out, boats are not designed for this type of installation, due to such things as long cable runs.
Hexagon will send surveyors out with equipment from Leica, one of its divisions, to do the dimensional control and to calibrate the gyroscopes, which are another source of error. In 2014, Hexagon acquired Veripos. “Many of the people in the Veripos organization come from the offshore survey world or the dredging world, so it is very marine focused,” said Turner. “No other providers have the marine experience that we do.”
For bathymetric software companies, the main current challenge is “keeping up with all the modern and cheaper hardware,” including RTK receivers, echo sounders, and side scan sonars, said Leon Steijger, owner and programmer at Eye4Software B.V., which makes the Hydromagic software.
Requirements and capabilities
To get accurate data, all position and depth records must be timestamped with high precision so that the location of the echo sounder pings can be calculated during post-processing, Steijger noted. “The software needs to be able to generate elevation maps, depth contours, and 3D terrain views and must support volume calculations to calculate how much water there is in a basin, or to determine how much material has been removed during dredging operations.”
Hydromagic uses “plugins,” which are pieces of software that are loaded optionally to interface sensors with the software. “For some hardware we also offer a plugin containing a user interface that can be used to, for instance, upload a planned route to an automatic pilot or to control the signal processing parameters of an echo sounder.” Operators only need to specify the dimensions of their vessel and correct for the sound velocity and the static draft (the distance between the water surface and transducer). They see the vessel’s track in real time, but the rest of the data are post-processed.
Hexagon controls its own correction services and the network that delivers them. “We obviously build our own GPS receivers, so we can tightly integrate inertial systems,” said Turner. “We use third-party inertial systems. However, because we have access to the tracking loops on the GNSS boards, we can tightly integrate that inertial system so it gives a level of coupling that’s difficult unless you are actually building those boards yourself.” While near-shore operations can use RTK or post-processing, he pointed out, “the offshore guys often use real-time positioning to collect data for oil and gas. And that is really where we come to the party, because we have all those services too.”
SBG Systems designs, manufactures, and calibrates its own IMUs, then integrates them with GNSS boards, creating OEM products. “We also design and produce our own firmware algorithms to merge all those datasets,” said Bazin. “From the selection of the MEMS sensor to the final product, SBG will design, manufacture, develop, and produce the entire systems. We also provide tools for people to integrate our systems to develop their own libraries or to integrate our libraries into their systems and work with some integrators for APIs so they can control our systems from their own application.” The company’s post-processing system, Qinertia, integrates GNSS corrections with raw IMU data. “So, when we do post-processing, we reprocess an entire solution at the end for position, but also for stabilization for pitch, roll and heading,” Bazin explained. One of the benefits is the ability to remove many multipath effects.
For bathymetric surveys using an unmanned aerial vehicle (UAV), the control software must keep the platform at a constant altitude and speed over the surface of the water, because the echo sounder is dragged through the water at the end of a cable, explained Alexey Dobrovolsky, CTO of SPH Engineering, based in Riga, Latvia, which delivers UAV-related software. Therefore, he said, “missions should be executed in a fully automated mode.” His company’s software only requires the UAV’s operator to define the survey area, set the direction of the survey lines, and specify the distance between them. The software will handle everything else. “We automatically recalculate the depth measured from the echo sounder to the real depth in our data files using data from a radar altimeter,” he said. “Our software contains a high-end model of the echo sounder, which has a tilt sensor and a pitch sensor.”
Of course, dragging an echo sounder from a UAV only works for small areas, such as in open pit mines where the liquid can be very contaminated. “The flight time with an echo sounder of the most popular UAV will be around 20 minutes,” said Dobrovolsky. “That determines the maximum length of the survey lines that can be covered by a single flight.”
A couple of years ago, SPH began to provide some UAV-based bathymetry solutions that use low frequency ground-penetrating radar (GPR). There are two scenarios when GPR can be useful for bathymetry, Dobrovolsky explained. The first one is to do bathymetry through ice on the surface of lakes or rivers, which would require drilling holes to use an echo sounder. “With GPR, you can do bathymetry through the ice layer,” he said. The second scenario is mountain rivers with extremely strong currents, when it is not possible to use a standard manned or unmanned boat, because GPR works without contact with the water.
Bathymetric systems are now also deployed on autonomous underwater vehicles (AUVs) that are only one to three feet long. “MEMS INS are compact and can be integrated directly with MBES systems, which provide an all-in-one compact system that can be easily deployed and operated because they are lightweight and their mechanical alignments are known and fixed,” said Bazin. “Some of these systems can go 2,000 meters below the surface of the water.” In post-processing, he pointed out, some MEMS INS can have an angular accuracy as low as 0.07 degrees for the vessel’s pitch and roll and a heading accuracy of as little as 0.01 degrees.
Outputs
To integrate diverse sensors with a UAV, SPH developed an onboard computer, called UgCS SkyHub, that logs data from the sensors. In the case of the echo sounder, it can be an NMEA stream or just a stream of current depth measurements, said Dobrovolsky. The device is also connected to the UAV’s autopilot, so it logs the platform’s position and speed, and with the altimeter. UgCS SkyHub can record three types of data files: a CSV file containing the coordinates, depths, and a few additional parameters; a file in NMEA 0183 format, which is also standard for bathymetry; and a SEG-Y file containing the full echo sounder data, including, for example, sediments and objects in the water.
SBG Systems’ software has two kinds of outputs, Bazin explained. First, a proprietary binary format, as well as NMEA and ASCII formats, that are used to provide stabilization and navigation for the platform in real-time. Second, a standard as-built survey format for post-processing. “Then, we have very powerful tools to output ASCII files that are completely configurable from header to footer,” he added.
Eye4Software’s main outputs are volume reports or plot sheets for end customers containing a map with depth colors and depth contours, as well as cross section views or XYZ export files for further processing in, for instance, AutoDesk Civil 3D and AutoCAD.
Feature image: A UAV from SPH Engineering tows a bathymetric sonar just under the surface of a river. (Photo: SPH Engineering)
For 30 years, Spirent Communications has built GPS/GNSS simulators, operating at the radio frequency (RF) level and building a broad customer base. Now, with the launch of SimIQ — which starts shipping at the end of October — the company is providing simulation at the I/Q level. (When talking about frequency mixers, the “I” stands for “in phase” and the “Q” stands for “in quadrature.”)
SimIQ is in response to requests from receiver experts, who want to be able to test their receiver algorithms earlier in the development cycle before designing the Application Specific Integrated Circuits (ASIC) or the Field Programmable Gate Arrays (FPGA).
SimIQ Capture: Record I/Q data from Spirent GNSS simulators into files. (Image: Spirent)
“They used to come up with their own individual mechanisms to generate I/Q data and test it,” said Ajay Vemuru, product line manager, NPI, Spirent. “For example, you can use programs that you develop on MATLAB to come up with I/Q data files, but that requires an effort in debugging them and keeping them up to date with the different constellations.” That effort grows as the number of GNSS constellations grows. SimIQ will use the same software as Spirent’s current simulator. However, instead of generating the RF signal, it will generate the I/Q data.
Any GNSS receiver, Vemuru explained, contains a radio that receives the RF signal and down-converts it to create a baseband digital I/Q signal. “That is the I/Q data that we are generating,” he said. “Instead of customers waiting for the RF or the ASIC to be completely designed, they can now take the I/Q straight out of our simulators, inject that into their algorithms, and run their correlators. You can run all your processing on this I/Q data without having to worry about the antenna characteristics and the front-end noise. You can pick and choose which pieces of the receiver you want to test.”
Because the software has not changed, the scenarios — such as the movement of the platform — are the same as before. Plus, customers can reuse them, running them at the I/Q level instead of the RF level.
SimIQ Replay: Generate RF with Spirent GNSS simulators from I/Q files. (Image: Spirent)
While Vemuru expects many of Spirent’s customers to be interested in SimIQ, he also anticipates new and evolving markets might take advantage of it. “There will be new teams in existing markets that we haven’t reached because they are engaging an earlier phase of the design process,” said Adam Price, director of PNT simulation at Spirent. “We want to target earlier phases in chipset development.”
In the world of autonomous vehicles, Price explained, engineers are doing significantly more simulation in software to verify more “corner cases” — jargon for problems or situations that occur outside of normal operating parameters, such as when multiple environmental variables or conditions are simultaneously at extreme levels. “As you start to get into safety-critical systems, for example, software simulation is becoming increasingly required,” Price said. “This could allow us to engage that segment. People want to carry out verification earlier in the design cycle.”
By running a simulation in hardware and presenting the devices being tested with a real RF signal, Price points out, engineers are limited to operating in real time. By contrast, in software they can run simulations faster or slower than in real time and even run several simulations in parallel. This is important for developing autonomous vehicles because engineers need to test many scenarios over millions of miles of simulated travel.
Spirent’s SimIQ, however, is addressing a somewhat different market, Vemuru said. “In fact, they would prefer to run slower than in real time because their ASIC or FPGAs are not yet in production. So, they would be essentially running them on CPUs, which take a lot more processing time.”
So far, we have been talking only about capturing I/Q data. However, SimIQ can also replay it. This, Vemuru said, “is essentially for customers who want to add interference patterns that, for some reason, they don’t want Spirent or anybody else to see. It can be any signal, so long as it is within the frequency of the GNSS spectrum. They can inject I/Q files into the platform itself. We take the external I/Q stream, generate the GNSS signals, add them up, and generate this at the RF level.”
One use case deals with classified signals. “They can always generate baseband I/Q data of that classified signal, as a file, and inject it into our simulator, so that we can generate the RF signal for that particular classified I/Q signal alongside the GNSS that already comes out natively from our boxes,” Vemuru explained.
Flight simulators range in price from free to tens of millions of dollars and in purpose from pure entertainment to serious business — such as learning to fly multi-million-dollar aircraft without crashing them in real life and getting anyone killed. Military and commercial pilots spend thousands of hours in simulators learning both routine operations and how to deal with emergency situations. They can become fully proficient through immersive training in these virtual environments. The U.S. Army, Air Force, Navy and Marines all use flight simulators to train pilots to fly in battle, recover in an emergency, and coordinate air support with ground operations. To do this, they use hardware and software developed both by military agencies and by commercial military contractors.
In high-end flight simulators, the trainee steps into a life-size replica of a cockpit, whereas others consist of several monitors that cover the trainee’s field of view, or, at the lowest end, everything is crammed onto a single monitor. All flight simulators, however, are designed to replicate as closely as possible the layout and controls of a real aircraft. (Ironically, the $120 Microsoft Flight Simulator Premium Deluxe Edition lets you fly 35 different planes, while flight simulators that cost tens of millions of dollars are limited to a few models because they have to physically replicate the cockpit layout, which varies from aircraft to aircraft. Some training centers invest in multiple simulators, while others privilege convenience over accuracy and use a single simulator model.)
Most professional flight simulators sit on top of either an electronically-controlled motion base or a hydraulic lift system that rotates the replica cockpit in three dimensions in reaction to both user input and simulated events. This provides trainees with haptic feedback, in other words, feedback they can feel. (Another example of a device that provides haptic feedback is a joystick with force feedback.)
Like when learning to sail offshore or to survive in the wilderness, a large component of any pilot training program is navigation. For flight simulators, this involves detailed aeronautical charts, huge amounts of Earth observation imagery including thousands of airports, and faithful replicas of several cockpit navigation instruments. While aviation programs provide standard training to ensure pilots can handle situations ranging from enemy fighters to bird strikes to engine failure, they may overlook the importance of duplicating actual cockpit instruments rather than relying on facsimile ones.
Simulating GNSS signals
This is where GNSS simulators come into play. They make it possible “to simulate the actual GPS signal required by the cockpit navigation instruments,” according to a case study by Orolia.
This approach, the company points out, offers advantages to both the trainees who use flight simulators and the engineers who develop them. For a trainee, “the advantage is that he is trained using the identical instruments as those in the actual airplane […] providing the same feedback as a real-world experience.” For an engineer developing a flight simulator, GNSS simulators make it possible to “design more effective flight simulation programs without compromising quality.”
Furthermore, “using real navigation instruments may […] reveal unexpected behavior from the instrument, which helps the pilot to be prepared for this possibility. If any conditions involving the plane dynamics are not properly handled by the navigation unit, the pilot can obtain actual feedback from real navigation instruments, which could differ from feedback provided by a facsimile instrument.”
Hardware-in-the-loop (HWIL) techniques enable Orolia to integrate its simulator in a flight simulator to reproduce the GPS/GNSS dynamics for the airplane in real time. “Because the pilot steers the aircraft in real time, the GPS simulator must also simulate GPS signals in real time, forming an HWIL integration,” the company said. “This integration enables the flight simulator to integrate the actual navigation unit to provide a very realistic environment for the trainee.”
Racelogic, another manufacturer of GNSS simulators, is launching a new RealTime LabSat that can connect to Microsoft Flight Simulator, including the new 2020 version. “This will create a live GNSS RF feed that accurately follows the trajectory in the simulator, enabling the testing of any GNSS device as though it were being flown on the aircraft,” said Julian Thomas, the company’s managing director. “To help make this a cost-effective solution, we have recently optimized our SatGen signal simulation software so that a real-time simulation such as this can be carried out on an entry-level PC with a full constellation of simulated satellites.”
The GNSS and flight simulation industries overlap even further. For example, Garmin, which manufactures consumer GPS receivers, makes the avionics used in some professional flight simulators.
Simulator demand on the rise
The utility of simulators is not limited to training human pilots and drivers. The demand for simulation is being sharply increased by the development of autonomous vehicles of every kind — from self-driving cars to unmanned aerial vehicles (UAV), from bathymetric vessels to urban air mobility (UAM) aircraft.
For example, manufacturers of self-driving cars need to simulate driving millions of miles, in all kinds of traffic and weather conditions, to perfect their vehicles’ algorithms. The result of all these simulations is better trained human and robotic pilots and drivers prepared for real situations, superior mission readiness, and maximum safety for both military and civilian operations on land, at sea and in the air.
Feature image: In a simulated G1000 NXi integrated flight deck for a King Air 350, a pilot refers to the Garmin Pilot app, used as a supplement during flight. (Photo: Garmin)
The number of GNSS constellations, satellites and signals is constantly growing. The threats to GNSS — from unintentional radio frequency interference (RFI), jamming, spoofing, multipath… and Federal Communications Commission rulings — are increasing, as are the public’s expectations of GNSS accuracy.
All these factors contribute to the need for ever more powerful and advanced simulators that can realistically simulate a wide range of optimal and suboptimal environments. That is why simulators are a rapidly growing sector of the GNSS industry.
At present, the main defense against jamming are continuous radiation pattern antennas (CRPA). Therefore, it is essential that simulators be able to accurately reproduce signals from CRPAs. They are even more useful when they can generate M-code (MNSA) signals, which not all simulators do.
Additionally, the development of autonomous vehicles requires engineers to simulate driving millions of miles, under a variety of environmental and traffic circumstances. To accomplish this in a reasonable amount of time requires them to run simulations faster than in real time, or run many simulations in parallel.
Finally, there is an increasing need to simulate alternative positioning, navigation and timing (PNT) signals being developed as supplements to and substitutes for GNSS signals in circumstances that make the latter unavailable or unreliable.
These are some of the challenges facing manufacturers of GNSS simulators. What follows are their brief descriptions of the approaches they are taking and the innovations they are introducing.
What is your most recent innovation?
Our latest simulator innovations contain wave-front generation signal technology, which allows you to generate GNSS and interference signals that represent the received signals for each antenna element in a phased array antenna manifold, usually referred to as a controlled radiation pattern antenna (CRPA). Our modular design approach enables users to simulate IMU data commensurate with the wave-front signals for a complete coherent GNSS/IMU simulation that is ideal for stimulating receivers that contain CRPA and IMU capabilities. Our simulators also contain proprietary synchronization technology that allows users to synchronize multiple systems to produce a “wave-front” of GNSS and IMU signals for multiple vehicles, or even an entire fleet.
Photo: CAST Navigation
What is your approach to jamming and spoofing?
CAST Navigations’ family of GNSS simulators are capable of realistically simulating a wide range of suboptimal conditions—such as jamming/spoofing, multipath, RF interference and satellite constellation perturbations—for virtually any commercial or military environment. Our interference signals or “jammers” can be located at any terrestrial location and can be static or dynamic in nature. A distinguishing feature of CAST Navigations’ simulation systems is that our interference signals are phase-controlled and coherent, allowing for proper phase transmission of each signal type for each receiving antenna element. You can also add an INS capability to any of our systems. These types of systems are perfect for testing GNSS and GNSS/INS types of navigation equipment.
What’s coming by 2023?
One of the key trends is the ability to generate M-code (MNSA) signals. Jamming and spoofing are becoming more prevalent, not just to the military but also to consumers. Every day, the military, as well as people like you and me, are starting to encounter more instances of interference that can deny GNSS equipment and even phones the ability to track some GNSS satellites or that transmit incorrect GNSS data, causing receivers to display incorrect position solutions. So, our focus is on products and capabilities that enable our customers to simulate those types of environments and help them to mitigate those kinds of events.
Orolia
Lisa Perdue Product Manager
What is your most recent innovation?
At Orolia we continue to evolve our innovative software-defined simulator approach. Our most recent innovation is our advanced spoofing option. We have taken our ability to define multiple jamming transmitters, each with their own trajectory and antenna pattern, and added the ability for the transmitters to send spoofing signals as well. By utilizing our capability to run multiple simulations on a single system, we give the user the ability to control every parameter of the generated spoofing constellation(s). The system automatically calculates the signal time of flight and the propagation loss, making this advanced capability powerful and easy to use.
What is your approach to jamming and spoofing?
Simulation of threat environments is a critical component of GNSS receiver testing. As awareness of the impact that jamming and spoofing can have on a GNSS-based system rises, so does the need to test. That is why we have implemented advanced jamming and spoofing options into our Skydel simulator’s core engine. Replication of degraded environments with threats ranging from one to hundreds is possible using the same hardware and software used for generating GNSS signals. No third-party hardware or software is required for complete testing against jamming and spoofing because we feel that this capability should be part of the core system, not an afterthought.
Photo: Orolia
What’s coming by 2023?
In the coming years, we expect to see more requirements for simulation of alternative positioning, navigation, and timing (PNT) signals. As governments and organizations continue to investigate alternate technologies, it will become necessary to simulate low Earth orbit (LEO) PNT, ground-based transmitters, and other signals being considered.
Another growing trend is the adoption of controlled reception pattern antennas (CRPAs) for their anti-jam capabilities. These anti-jam antenna systems can only be tested by specialized simulation systems, so we can imagine these simulation systems being commercialized for a broader market around 2023.
Racelogic
Julian Thomas Managing Director
What is your most recent innovation?
Recognizing the need of our customers to test their products with a simple solution that uses the latest GNSS signals, we have updated our SatGen software to create accurate simulations using all satellite data currently being transmitted across the various constellations. We have also optimized the performance of SatGen so that a standard desktop PC can be used to simulate these signals in real time. Also, the simulation can now be driven using an external NMEA stream, allowing full remote control of the trajectory.
What is your approach to jamming and spoofing?
The LabSat 3 Wideband records and replays all available GNSS signals in high fidelity, allowing jamming and spoofing signals to be reproduced accurately on the test bench.
Photo: Racelogic
What’s coming by 2023?
With so many employees now working from home due to COVID-19, the pressing concern for many companies developing GNSS technology is how to provide employees with suitable equipment that is required for them to carry out their jobs efficiently away from the office. Usually these employees would utilize the shared resources of a well-equipped office, with experts on hand to help, but working from home has made access to these devices challenging. Due to LabSat 3’s small size, low cost and ease of use, we have seen a significant increase in sales to companies furnishing their employees with a suitable method of testing their GNSS devices while working from home.
With the advent of a new breed of high-performance, low-cost GNSS receiver, many new applications are being developed in new and exciting sectors, utilizing a level of accuracy previously considered too expensive to be a commercial proposition. The number of GNSS engines will therefore increase rapidly in the marketplace, with a corresponding increase in demand for cost-effective signal simulation for test and development.
Rohde & Schwarz
Markus Irsigler Product Manager Signal Generators, Power Meters
What is your most recent innovation?
We further improved multi-frequency, multi-constellation simulation capabilities in our high-end segment. The GNSS high-end simulator R&S SMW200A provides signals for all GNSS frequency bands on a single RF output. A second internal RF path can be used for advanced interferer simulation, testing the receiver’s resilience to spoofing or to address dual-antenna scenarios. This keeps setups simple and compact. When more than two RF paths are required, two or more R&S SMW200A can be operated together in a master/slave configuration. Such setups are required for multi-antenna receiver test applications where the signals’ relative carrier phases are analyzed, like CRPA or attitude determination tests. Our new RF ports alignment software automates alignment of the GNSS signals and guarantees correct amplitude, time and phase relations at the RF inputs of the device under test. We also increased the maximum channel count to more than 600 channels to improve testing of multi-constellation, multi-frequency receivers against multipath, jamming and spoofing.
What is your approach to jamming and spoofing?
Besides our recent innovations, Rohde & Schwarz plans to provide new interference simulation capabilities within the GNSS simulator. This new feature will allow the user to replay recorded jammer signals as well as user-defined waveforms. The R&S Pulse Sequencer software helps with the definition of most complex interferer scenarios.
Photo: Rohde & Schwarz
What’s coming by 2023?
Developments in the field of advanced driver-assistance systems (ADAS) aiming for fully autonomous vehicles raise new challenges for reliable PNT solutions. Simulation of interference and jamming scenarios will hence become important in the automotive market. Antenna arrays have proven suitable to counteract RF interference (RFI) by incorporating spatial-processing techniques and might therefore find greater entry into the automotive market. Test solutions must address requirements for simulating all kinds of intentional and unintentional RFI for multi-constellation, multi-frequency and multi-antenna receivers. Apart from simulating GNSS and interference sources, test solutions for autonomous driving will require several other techniques and signals to be applied or simulated, such as RTK/PPP or outputs from other vehicle sensors to perform sensor fusion.
Spirent Federal Systems
Jeff Martin Vice President, Sales
What is your most recent innovation?
Launched in 2018, SimMNSA became the first MNSA simulator to achieve GPS Directorate security approval. The software enables users to simulate true MNSA M-code with real-time code and message generation, removing the constraints imposed by simulator data sets (SDS). SimMNSA v2.0 does even more. It is able to broadcast nominal M-code conditions and recreate SDS-defined events. It incorporates an advanced editor to edit military navigation (MNAV) content, allows users to craft and define scenarios, and much more.
What is your approach to jamming and spoofing?
Spirent offers numerous capabilities for emulating GNSS signals in the presence of interference and spoofing attacks. Our solutions provide accurate, repeatable and quantifiable signals, enabling customers to conduct accurate tests with trusted results. We can test against internally generated interference enabling multiple “fields” of jammers with various interference types; hundreds of interference signals using external IQ blended with simulator-generated GNSS, and Blue Force Electronic Attack jamming waveforms for testing MGUE devices operating in GPS-denied environments. Spoofing capabilities include signal, navigation data and cyber-level attacks via manipulation of up to 12 copies of each primary GNSS constellation, each fully editable; intuitive spoof attack generation via Spirent’s SimSAFE software option — which also allows live sky synchronization/spoofing, and more.
Photo: Spirent
What’s coming by 2023?
Threats to reliable and accurate GNSS navigation and timing are developing rapidly. Fortunately, innovative solutions for resilient PNT are in development and will continue to challenge the industry for years to come. The ability to simulate these threats and the mitigation techniques to overcome them is changing the landscape for the simulator industry. It’s more important than ever to have up-to-date test tools. Robust signals along with frequency and constellation diversity will continue to drive the market in addition to GNSS backup systems, or AltNav. The FCC has certainly presented the GNSS industry with an immense challenge.
Syntony GNSS
Sylvain Daubas Simulator Activity Manager
What is your most recent innovation?
Yesterday, GPS systems had to “work.” Today, they must work fine. This is the difference, and all equipment vendors have realized this. It is no longer acceptable to have 200 meters or more of error in an urban environment. Because of the extreme complexity of the electromagnetic situation in the GNSS spectrum, making a reliable and precise location system requires more and more powerful and advanced simulators. This is why the GNSS simulator market is booming.
Among the many new features implemented in Syntony’s GNSS simulator this year, two stand out.
First, 1000-Hz hardware-in-the-loop now allows an accurate simulation for high-dynamic receivers (up to more than 100 Gs!), with zero artifact and zero-effective latency. This is the ultimate in trajectory management.
Second, signal computing capacity has made a significant leap forward due to hardware and software optimizations. Constellator can now simultaneously generate up to 660 L1 C/A-equivalent signals. And this level of performance can be unlocked remotely, without a hardware update.
Photo: Syntony GNSS
What is your approach to jamming and spoofing?
Simulating a GNSS environment with a set of jamming or spoofing signal sources today is the standard. But what about a simulation of an extremely complex urban scene with 50 or 100 jamming/spoofing sources? The only reasonable solution to implement this would be a massive parallel software-defined radio (SDR)-based simulator solution. This is what Syntony can and will do, thanks to its full software GNSS simulator architecture, which can be distributed on a server farm.
What’s coming by 2023?
A revolution is arriving: the possibility of generating a full GNSS simulation including many hundreds of satellites and signals, in real time and in pure software. This is now possible, and Syntony has demonstrated it with the Constellator. This will change the simulation world. First of all, Moore’s law will bring significant improvements to this domain year after year. More importantly, new systems and services will be possible: massive parallel scenario simulation including jamming and spoofing, floating simulator licenses, software as a service, etc. In this trend, playback machines will be needed, and obviously a strong internet connection will be necessary to download hundreds of gigabytes of I/Q files overnight.
Feature image: Samuel King Jr./United States Air Force