Around the world, countries are cautiously beginning to reopen businesses and activities they had shut down to limit the spread of the coronavirus.
Countries
Austria will reopen some smaller shops, hardware and garden stores but people will have to wear masks to supermarkets and on public transport. From May 1, all stores, shopping centers and hairdressers will open; restaurants and hotels will open from mid-May at the earliest.
China has largely removed restrictions on mobility while tightening policy to contain the virus transmission of asymptomatic cases.
The Czech Republic on April 6 allowed shops such as hardware and bicycle stores to re-open. Outdoor sports facilities have also reopened. Starting on April 20, students will begin a phased return to colleges and schools, but high schools are not expected to fully open until September 1. From June 8, all retail stores, including those in shopping centers, all restaurants, hotels and other accommodation will be allowed to reopen.
Denmark will reopen daycares, kindergartens and schools (up to 5th grade) on April 22, while other bans, such as on gatherings of more than 10 people, will remain in place until May 10. Churches, cinemas and shopping centers will remain closed. All festivals and large gatherings are banned until August.
Germany will allow stores with a sales area of less than 800m2 to reopen on April 20 if they maintain hygiene and prevent lines from forming. Schools with hygiene plans in place will gradually reopen from May 4, with priority given to primary and secondary pupils in final years, while daycare centers will remain shut. Other social distancing measures, along with bans on large public events, will remain in place.
India has extended what is currently the world’s biggest lockdown through May 3.
Italy allowed bookstores, laundries, stationery stores and children’s clothing stores to reopen on April 14. “Phase 2” of the three-phase reopening plan will start sometime after May 3. Businesses that reopen will be required to make hand sanitizer available, enforce the use of masks in enclosed spaces, and use disposable gloves to handle food and drink.
Japan has tightened its approach, declaring a state of emergency in Tokyo, Yokohama and Osaka, the country’s three biggest cities.
Norway is prioritizing reopening schools and will begin to scale back its lockdown measures from April 20, when kindergartens will start to reopen. A week later, schools will reopen for pupils in grades one to four.
Spain allowed many non-essential employees to return to work after the Easter weekend. Construction and other industries have been allowed to restart, but non-essential stores, bars, and restaurants remain closed. Spanish police are distributing more than 10 million masks to commuters at metro, bus, and train stations.
Switzerland has extended social distancing restrictions to April 26, but might relax other measures later this month, including border controls, school closures and bans on gatherings, if the virus’ spread is kept in check.
United States reopenings vary by state
If you cannot resist the urge to eat at a restaurant or have a drink at a bar during this pandemic without leaving the United States, head for South Dakota, the only state that has not banned these activities except for take-out.
However, unless you live in neighboring Iowa, Nebraska, or North Dakota, you will be most likely breaking the law of one of the 39 states that have banned travel that is not deemed essential or to get to work (five of them with exceptions or limitations). South Dakota and Arkansas have no travel bans and the remaining six states have a variety of advisories and bans targeted at various classes of people, such as those over 70 years old.
As for gatherings, 27 states restrict them to ten people or fewer, four states to nine people or fewer, and five states allow no gatherings at all. Only two states, North Dakota and Minnesota, have not banned any gatherings.
Twenty-five states have limited all nonessential businesses to minimum operations or remote work, three have closed all nonessential businesses, and only two states — again, Nebraska and South Dakota — have not restricted any business activity.
Finally, while 27 states have no state-wide quarantines, the remaining 23 have a bewildering array of quarantine rules for travelers depending on where they have been. However, the duration of the quarantine is always 14 days.
PrecisionHawk’s Jaymie Young and Matt Tompkins fly a UAV with the hosts of History Channel’s “Lost Gold of World II” in the Philippines in late 2018. (Photo: PrecisionHawk)
The collection of about 300 giant geoglyphs known as Nasca Lines were etched into the ground in the Peruvian coastal plain 2,000 years ago by the Nasca culture in South America. They depict various plants, animals, and shapes and are so large that they can only be fully appreciated when viewed from the air. Unlike the Nasca Lines, most archaeological sites are hard to see from the air, especially those deep under thick jungle vegetation, as in the lowlands of northern Guatemala. Here, lidar’s ability to penetrate foliage makes it the ideal tool for archeological exploration. At the same time, the lack of infrastructure, including airports, makes UAVs the platform of choice for many such projects.
Challenges for lidar in archaeology
Operating aerial lidar for archaeology in a jungle environment presents four challenges. The biggest one is penetrating the canopy. “Typically, the sites that they have been exploring lately have been quite overgrown, and disguising what has been there for a long time, to the extent that even someone walking on the ground has not been able to see the scope of the site,” said Paul LaRocque, senior scientist at Teledyne Optech. Penetrating multiple layers of vegetation requires a minimum of two lidar returns. For heavily vegetated environments, Matt Tompkins, director of Flight Services at PrecisionHawk, recommends a five-return system.
The second challenge is ground-truthing the data collected, explained Thomas Garrison, assistant professor in Ithaca College’s Department of Anthropology. “Even though we digitally removed the forest, it is still there, of course.” For example, it is hard to confirm long roads between sites, because they run beyond a ground observer’s field of vision.
The third challenge is acquiring a GPS signal. “In the tropical environment, a UAV needs to return to its take-off site very precisely,” Garrison explained. Finally, jungles put a twist on the familiar trade-offs between fixed-wing and rotary-wing UAVs: “A fixed-wing UAV will cover a greater area, but you may not have enough space for it to take off where you want to fly your lidar and may not be able to recover it,” Garrison said.
Making lidar an effective tool for archaeology required the development of sensors with very high pulse repetition frequencies (PRF) and with multi-look angles, which better penetrate the canopy to reach the ground and any structures, LaRocque explained.
Manned aircraft vs. UAVs
Archaeology missions need aerial lidar sensors with sufficient peak power from each pulse to reach the ground after much of it is absorbed or reflected by the canopy. In this respect, manned fixed- and rotary-wing aircraft have an advantage over UAVs because they can carry larger sensors with a higher peak power. Plus, they can cover much larger areas per flight. “This is important because archaeologists have been finding that [areas of interest] are much bigger than they ever imagined,” LaRocque said.
Finally, forests and jungles make it challenging to find open areas for launching and landing UAVs and flying them by line of sight. “Where do you stand to see the UAV above the canopy?” For these applications, LaRocque said, manned aircraft probably fly just 500 to 1,000 meters above ground level, “because they are not out for high survey efficiency but for penetration to the ground.”
Tompkins, whose company has conducted many missions in jungle environments and other remote places, takes the opposite view. Archaeology constantly presents new challenge and “takes you to some pretty crazy places,” he said and UAV lidar “allows archaeologists to access information that would otherwise be too difficult or dangerous to access.” In the projects on which PrecisionHawk has worked in heavy jungle, it has seen “excellent penetration through heavy jungle canopy, which gave us access to ground-level data,” he said.
Logistically, Tompkins pointed out, UAVs are “significantly easier and safer than manned aircraft” in remote areas with little access to airport infrastructure, air traffic control, and any sort of emergency services. A team with a UAV can mobilize and travel quickly. Where there is no electricity to recharge the UAV’s battery, the team will bring a generator.
Positional accuracy
Archaeological applications do not require survey-level positional accuracy. Archaeologists only need to be able to locate on the ground features that they identify in the 3D lidar point cloud. “We use Trimble Juno 5s, so that we can load the lidar data directly onto their screens,” Garrison said. “If we get near a structure, we only need to take a point. We don’t even need to find base stations and do corrections afterward. We can manually correct the points based on where they were on the structures.”
Ancient structures are rarely in the areas with the thickest, nastiest vegetation, which are usually low-lying areas, Garrison said. However, those areas might reveal other items of cultural interest, such as agricultural fields. “In the lidar data we have, we are seeing that ancient societies were terraforming their entire landscape, so everywhere you go there is something to check or confirm.”
Missions
In 2018, PrecisionHawk conducted an archaeological project in a remote jungle in the Philippines for a History Channel show called “Lost Gold of WWII.” Show producers were trying to find where Japanese troops might have stored gold stolen from the Philippine government.The team flew lidar on a UAV to identify roads or other manmade structures that could help them identify possible hiding spots in areas pinpointed through historical documents, Tompkins recalled.The PrecisionHawk team produced a colorized lidar data file in the jungle that the producers used on the program.
The largest lidar acquisition for archaeological investigations in the world is the Pacunam Lidar Initiative (PLI), a consortium of scholars funded by the Guatemalan foundation Pacunam (short for Fundación Patrimonio Cultural Y Natural Maya). So far, the PLI has scanned about 7,000 square kilometers in the lowlands of northern Guatemala.
Garrison is one of three principal consultants for the foundation. “Lidar has a huge impact in archaeology under tropical forests because you get more bang for the buck in terms of peeling back the forest and revealing the preserved ancient landscapes underneath,” he said. “We’ve been working on these data since we first flew in 2016 with the National Center for Airborne Laser Mapping in Houston. We published preliminary results in Science in 2018.” In the massive PLI project, “Instead of just single sites, we can see broad trends across huge areas.”
The first phase of the Pacunam lidar initiative covered 2,100 square kilometers in northern Guatemala in 10 different polygons of data acquisition. “We found that there were 60,000 more structures in these areas than we knew about before,” Garrison said. This raised the question of how so many people could feed themselves. The lidar data revealed that they had used huge swampy areas as agricultural fields. It also revealed many road systems between and within these sites and many defensive earthwork features of military engineering for warfare distributed along the valleys.
“All of that changed our view of what this ancient landscape looked like,” Garrison said. In the summer of 2019, the project flew another 5,000 square kilometers and is now analyzing the data, which shows “a complete picture of an ancient culture’s impact on the landscape,” Garrison said. “When you think of ancient Rome and everything that they had, you can’t really see everything because modern Europe is there. But here we have all this stuff preserved under the jungle in a way that is letting us see the totality of an ancient culture.”
Discoveries made with UAVs
• Using UAV lidar, the Crow Canyon Archaeology Center and the Canyons of the Ancient National Monument were able to map an 800-year-old Pueblo site at Sand Canyon, Colorado, and discover previously undocumented structures. UAV experts from Caddis Aerial and Routescene conducted the survey using a Velodyne HDL32 lidar scanner on a DJI M600 Pro UAV flying at 40-meter altitude relative to the take-off point. They then processed the point cloud, consisting of 3.2 billion points, using Routescene’s LidarViewer Pro software and created a digital terrain module at 400 points per square meter.
• A hexacopter built with DJI technology, flying 20–60 meters above the ground, enabled Isabelle Heitz of AirD’éco to map several ancient sites, including the microtopography of an ancient theater covered by woods in the center of Soissons, a town in eastern France, and a fortified town of the Gallic age, now covered by thick woods.
• Using Google Earth, satellite imagery and low-flying UAVs, archaeologists Sarah Parcak and Christopher A. Tuttle discovered a previously unknown monumental structure that had been hidden in plain sight only half a mile from the World Heritage site of Petra, Jordan.
Using data from GPS receivers and seismographs, three seismologists may have found a way to identify tsunami earthquakes in time to warn people
A few times a century, a medium-sized earthquake causes a large and devastating tsunami. The most recent occurrence was in 2010, when a magnitude 7.8 earthquake off the Mentawai Islands in Indonesia set off a tsunami that was more than 50 feet high in some places, killing 509 people and displacing 15,000.
While rare, these tsunami earthquakes are particularly dangerous because they can hit coastal communities within five to 15 minutes, before officials can issue a warning. Now, however, using data from GPS receivers and seismographs near the 2010 Mentawai event, three seismologists — Valerie Sahakian and Diego Melgar at the University of Oregon and Muzli Muzli at the Earth Observatory of Singapore — may have found a way to identify tsunami earthquakes in time to warn people.
Very large earthquakes under an ocean break both the deeper part of a subduction zone, where one tectonic plate is sinking beneath another, as well as its shallow part, in a rapid motion that creates a tsunami. Tsunami earthquakes, on the other hand, happen almost entirely in the soft, weak section of a fault, moving slower and creating much more movement on or near the sea floor compared to earthquakes of the same size that happen in rigid rock. This creates much larger tsunamis than expected. A tsunami earthquake might have the same magnitude as an earthquake that occurs in rigid rock but produces much less of what seismologists call high-frequency energy.
Currently, officials issue tsunami warnings within tens of minutes of detecting an earthquake above a certain magnitude within a certain distance of a coastal area. This method, however, fails in the case of tsunami earthquakes, which produce tsunamis that are disproportionate to their magnitude.
Indian Ocean (Jan. 2, 2005): A village near the coast of Sumatra lays in ruin after a tsunami struck South East Asia. (Photo: U.S. Navy/Photographer’s Mate 2nd Class Philip A. McDaniel)
Traditionally, scientists have detected tsunami earthquakes by comparing their seismic magnitude with the amount of high-frequency energy they radiate, both recorded by distant stations. Tsunami earthquakes have a very low ratio of energy to magnitude; their energy, instead of strong shaking, produces a large slow movement of the seafloor.
In the past, scientists had to measure this ratio using seismic waves that had traveled from the earthquake’s epicenter to seismographs hundreds or thousands of miles away. This did not give them enough time to identify tsunami earthquakes and warn people before the tsunami’s wave hit the coast.
The recent analysis, however, enabled scientists to figure out a faster way to identify these rare tsunami earthquakes by using two proxies:
data from seismic stations onshore near the epicenters of 16 earthquakes that measured directly how much the ground shook in each case, to determine the amount of high frequency energy in each earthquake, and
data from GPS stations close to the earthquakes, to measure the magnitude of each one on the basis of how much it moved the ground.
The GPS stations used in this study were from the Badan Informasi Geospasial (BIG) network from Indonesia. The data were acquired in real-time but processed with final orbits and clocks using precise point positioning (PPP). The scientists averaged the 3-component displacement, using centimeter-level solutions, and saw 3-10 centimeter vertical displacement.
This methodology, using data available during and immediately after an earthquake, enables scientists to compare the amount of energy in each earthquake with its magnitude, without waiting for their seismic waves to travel to distant measuring stations. Seismologists will be able to use this approach to identify tsunami earthquakes immediately and warn nearby coastal communities before a tsunami wave reaches them.
Citation. Sahakian, V. J., Melgar, D., & Muzli, M. (2019). “Weak near-field behavior of a tsunami earthquake: Toward real-time identification for local warning.” Geophysical Research Letters, 46(16), 9519–9528.
The John Deere StarFire 6000 RTK receiver operating in the field. (Photo: John Deere)
Precision agriculture — the practice of optimizing inputs of seed, water, and fertilizers while maximizing yields by mapping variations in soil characteristics and guiding machinery accordingly — began in the United States in the early 1980s and has been growing steadily. Key components include soil mapping based on sampling and remote sensing, proximal sensing of soils and crops, variable rate irrigation and variable rate spraying of fertilizers and herbicides, and automatic tractor navigation.
“GNSS-based guidance is probably the most highly adopted precision ag technology, followed by variable rate and section control,” said John Fulton, associate professor at The Ohio State University. “I suspect that somewhere around 40% of those GNSS receivers use RTK-level corrections — which provide sub-inch accuracy — and that number is increasing.”
Need for sub-inch accuracy
Water runs downhill, of course, which makes vertical accuracy critical for hydrology. “AgLeader builds a plow to put tile in soil to drain water,” said Bill Cran, AgLeader Technology’s GNSS product specialist. “It might only be 4 inches round; so, if we are off by 2 or 3 inches vertically, that affects where water can run.” To get the best vertical accuracy possible, he recommends farmers install a base station in the field where they are operating.
Sub-inch accuracy also enables farmers to determine where to plant each seed, rather than monitoring planters at the row level. “That may not be a requirement today, but it is certainly coming,” Cran said.
Market demand for RTK in agriculture is increasing, an important factor for drone guidance or machine control, said Gustavo Lopez, market access manager at Septentrio. “The robots are very close to the crops. When small robots are working in a corn field, the corn plants are causing multipath or shadowing GNSS signals,” Lopez said. “You need either a good RTK or GNSS-INS, because if you lose satellite lock you can still coast for a while with an IMU.”
Services and options
AgLeader’s displays have a built-in networked transport of RTCM via internet protocol (NTRIP) client that enables it to connect to NTRIP networks and CORS networks, as well as other free and subscription-based networks. “That allows us to get RTK from the internet for customers that want to go that route,” Cran said. Alternatively, the company offers NovAtel GPS receivers, including Satel- or Freewave-based RTK options with 400 MHz and 900 MHz radio options that can communicate with a similar base station. This spring, it will begin to offer NovAtel’s TerraStar-X service. “We are calling that ‘RTK from the sky,’” Cran said. “The expectation is sub-inch accuracy, with a convergence time of less than one minute. Many of our customers and dealers are very excited about that option.”
Septentrio’s GNSS modules for agriculture are used mostly in mapping drones, Lopez said. The modules mitigate interference and spoofing. “We have also been quite successful in robotics for agriculture,” Lopez said. Septentrio is working closely with the French agriculture robotics company Naïo Technologies, which integrates its robots with Septentrio’s smart antenna GNSS products, providing a full RTK solution as well as autonomy.
For areas without RTK networks, some farmers buy and install Septentrio base stations that provide corrections to their robots or UAVs. Septentrio provides agricultural mapping software for post-processing data gathered without RTK. Also on offer are L-band receivers — while not as accurate as a local RTK network and possibly with higher convergence time, the relative accuracy of L-band corrections is more than good enough for many ag robots, Lopez explained.
On the baseline
The vegetable weeding robot Dino — shown here operating in Yuma, Arizona — uses a Septentrio GNSS receiver. (Photo: Septentrio/Naio Technologies)
Most RTK users are on a short baseline — under 5 miles from the base station to the rover, according to Al Savage, manager of John Deere’s StarFire network. Medium baseline is about 5–8 miles, and long baseline is up to 12 miles. In 2015 John Deere released its Base Station Manager, which enables dealers to remotely upload firmware, upkeep the rover access list, and monitor their base stations.
As dealerships and their RTK networks merged and farms expanded, it became difficult for farmers to keep track of which base station to use. So, in 2019 John Deere released an Automatic Base Station Switching feature that links the RTK radio configuration to the field boundary in its Generation 4 display.
Also new: A John Deere StarFire receiver can continue to operate if it loses connection to a base station using the RTK Extend feature. The StarFire SF6000 rover receiver can continue operating with RTK-like accuracy for up to 14 days without connecting to an RTK base station, compared to only 14 minutes for a previous receiver, Savage explained. The increase “was very well received by customers, especially those operating in areas challenged by line of sight or trees and foliage on field boundaries.”
In South America, John Deere’s RTK Flex feature, “will automatically switch between RTK and SF3 during a time in the day when scintillation causes the greatest interference,” Savage said, enabling farmers “to continue working with similar accuracy when RTK is unavailable due to scintillation.”
Remaining obstacles to adoption
Despite’s RTK’s growing popularity, there are a few remaining obstacles to its adoption.
Cost. “Though the cost has been greatly reduced over the years, RTK is still more expensive than other correction signals out there,” Fulton said. Part of the cost is due to the hardware, Cran pointed out. “There are rover and base station radios, there are towers to put up. On the NTRIP side, there are cell modems to put in vehicles, and they require keeping a data plan active.” The agriculture market traditionally has been very cost-sensitive and conservative, Lopez said. “Farmers expect to implement very low-cost solutions. They want to know whether they will have an ROI (return on investment) on these solutions.”
Satellite services offer a cheaper alternative to RTK. TerraStar-X, for example, gets rid of the cell modem hardware and the requirement for base station hardware, Cran said. “At a lower accuracy level, there are other satellite-based TerraStar signals: TerraStar-C and TerraStar-C Pro, which get an accuracy maybe under 5 to 20 cm. Those are less-expensive alternatives that growers are using without making the leap to RTK.”
Lack of Internet Connectivity. While most RTK services, including NTRIP, require an internet connection, many rural areas have limited broadband and even cellular connections. Some areas lack support for RTK, Fulton said.
Lack of cross-platform compatibility. Farmers with a mixed fleet want to run a mix of receivers. “For example, John Deere and Trimble RTK do not work together,” Cran said. “It is still very manufacturer-specific. I cannot take a NovAtel receiver that is AgLeader branded and use it with a John Deere RTK network.” NTRIP partially enables cross-platform mixing and matching. “We’re excited about TerraStar-X, too, because, while it is specific to NovAtel receivers, it is not tied to any base station hardware,” Cran said. “So, a John Deere guy can put an AgLeader receiver on their vehicle and use TerraStar-X and still get that accuracy without being tied to the Deere RTK network.”
Liability. While safety is not nearly as big an issue as it is with autonomous vehicles on the roads, liability questions will soon loom. “If, for example, a robot destroys a whole plantation, someone must be liable,” Lopez pointed out. “Was it the robot? The GPS receiver? Other sensors? The farmer? What if there is a spoofing attack and the robot goes to a neighbor’s field?” Such challenges are slowing adoption. “That is where the reliability of the GNSS is becoming important,” he said.
The future
Soon, satellite-based internet connections could make RTK correction more widely available and give more growers the option of using NTRIP, though at a cost. WAAS, a free service of the U.S. government, is broadcast by satellites but does not achieve the accuracy level of RTK. “RTK is still a localized correction,” Fulton said. “We may see that shift to satellite, but it will more likely be an online or some other type of communication.
“Once farmers start using RTK, it is very unlikely that they will ever revert to another type of correction,” he added.“RTK is a very addictive correction service for folks.”
Savage concurs. “RTK is addictive because of its accuracy, efficiency and repeatability.” Ultimately, however, to achieve universal adoption, RTK solutions will need to work everywhere, with little intervention by the farmer.
Creating detailed street maps and keeping them updated is an expensive and time-consuming task performed mostly by large companies. They ignore the many parts of the world where this task is not profitable, even though the need is high due to rapid growth and change in the street network, such as in Thailand.
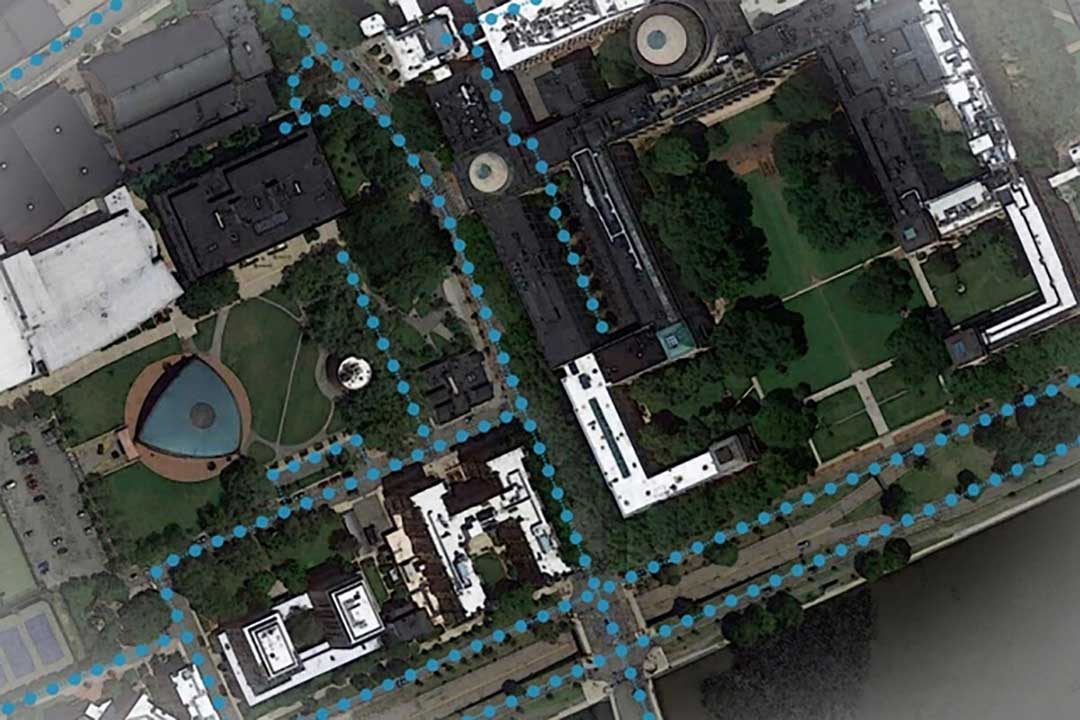
To automate the process and make accurate digital maps available in any country, researchers at the Massachusetts Institute of Technology (MIT) and the Qatar Computing Research Institute have developed an artificial intelligence (AI) model called RoadTagger. It uses satellite imagery to tag road features in digital maps, such as lane counts, which are essential for reliable navigation.
Satellite imagery companies are constantly expanding their coverage and increasing their refresh rate, so this source of mapping data is more readily available and up to date than the data collected on the ground, such as by Google’s fleet of mapping cars. However, satellite imagery often suffers from occlusion from trees, buildings, overpasses and other obstacles.
RoadTagger gets around this problem by using a combination of neural network architectures to predict hidden features. Testing of the model with digital maps of 20 U.S. cities showed that it predicted the number of lanes with 77% accuracy and the road type with 93% accuracy.
An AI model developed at MIT and Qatar Computing Research Institute that uses only satellite imagery to automatically tag road features in digital maps could improve GPS navigation, especially in countries with limited map data. (Map data: Google/MIT News)
RoadTagger, which combines a convolutional neural network (CNN) and a graph neural network (GNN) is fed only raw data and automatically produces output, without human intervention. The CNN, commonly used for image-processing tasks, takes as input raw satellite images of target roads. The GNN — widely used to model relationships between connected nodes in a graph — breaks the road into roughly 20-meter “tiles,” each of which is a separate graph node.
For each node, the CNN extracts road features and shares that information with its immediate neighbors, thereby propagating road information along the whole graph. For example, if only two lanes of a four-lane road are visible in an image, the model uses information from nearby tiles, such as road width, to conclude that the road has four lanes.
The researchers trained and tested RoadTagger using the OpenStreetMap data set. First, they collected confirmed road attributes from 688 square kilometers of maps of 20 U.S. cities, then they gathered the corresponding satellite images from a Google Maps dataset. The training taught the model what weight to assign to various features and node connections, and it now automatically learns which image features are useful and how to propagate those features along the graph.
The researchers hope that RoadTagger will help humans validate the constant stream of changes in OpenStreetMap and similar datasets as well as enrich them with details that they do not already contain, such as whether a road is paved.
Citation. He, S., Bastani, F., Jagwani, S., Park, E., Abbar, S., Alizadeh, M., Balakrishnan, H., Chawla, S., Madden, S., & Sadeghi, M. A. (Dec. 28, 2019). “RoadTagger: Robust Road Attribute Inference with Graph Neural Networks.” arXiv:1912.12408v1.
While often an underestimated component of a positioning and navigation system, a GNSS antenna is critical to a receiver’s success in acquiring all available GNSS signals while rejecting unintentional interference, jamming, multipath and spoofing. GNSS antennas come in as many flavors as receivers, to address the challenges posed by different market sectors, applications, environments and threats to signal integrity.
Each solution reflects a different balance among performance, cost, size and other variables. For example, antennas for handheld devices must be small and lightweight, while those for excavators and dozers can be much larger and heavier but must be able to operate for years while subjected to severe vibrations and harsh environmental conditions. Antennas for military and safety-critical applications must be especially impervious to jamming and spoofing.
Most applications, however, require antennas, like receivers, to have the smallest possible size, weight, power and cost (SWAP-C). Some applications, such as in the automotive market, must also take aesthetics into account.
We asked Javad GNSS, NovAtel, Trimble, Topcon and Harxon about their key markets and the challenges their antennas are designed to address. We also asked them to look back at the past three years and forward at the next three to discuss key innovations. Finally, they discuss technical challenges and industry trends.
See part 1 and part 2 of our GNSS receiver manufacturer overviews.
Javad GNSS
The GrAnt-G2T antenna. (Photo: Javad GNSS)
Key Markets. “The unmistakable lime-green Javad GNSS receivers and antennas are known to surveyors the world over, and we also support reference station, machine control, precise timing and any other market requiring high-performance / high-precision GNSS antennas,” said Javad Ashjaee, founder and CEO.
Specific Challenges. “A good GNSS receiver should bring in all wideband GNSS signals and reject all other unwanted signals,” Ashjaee said. “J-Shield, a robust filter in our antennas, blocks out-of-band interference — in particular, signals near the GNSS bands, such as the LightSquared signals — making the precious near-band spectrum available for other usages.”
Key Innovations. “To support our users in ever more challenging environments,” Ashjaee said, “such as denied environments where electronic warfare takes place, we have developed a new GrAnt-G2T antenna variant with even stronger J-Shield filtering: improved P1dB (the 1-dB compression point, > –30 dBm) and additional upper and lower out-of-band filtering.”
Harxon
The HX-CSX100. (Photo: Harxon)
Key Markets.Harxon is dedicated to designing and manufacturing high-precision GNSS antennas and solutions for industries such as surveying, UAVs and precision agriculture, said Wang Xiaohui, R&D manager.
Specific Challenges. “Harxon’s GNSS antennas primarily address issues related to the reliability of phase center, multi-constellation full-frequency coverage,” Xiaohui said, “tracing unstable satellite signals at low elevations, multipath signal interference, and how to integrate high-precision GNSS antennas and mobile communication antennas into a single design.”
Key Innovations. Over the past three years, Harxon has made “great breakthroughs” in GNSS antenna innovation, Xiaohui said. First, it greatly reduced the size and weight of choke ring antennas. As an example, Xiaohui cited the company’s mini choke ring antenna HX-CGX611A. Second, it optimized accuracy to the millimeter level and expanded to full frequency its quadrifilar helix antenna, such as with the D-Helix antenna. Third, Harxon upgraded the surveying industry to 4G communication by developing a four-in-one antenna that supports multi-constellation with full frequencies and integrates GNSS antennas, Bluetooth and 4G modules with high compatibility and outstanding performance, Xiaohui said, such as with the HX-CSX100. “For the next three years, Harxon will continue its research and investment in antenna technology breakthroughs, especially with regard to further miniaturization and improved performance.”
Technical Challenges. “The first interesting challenge is how to guarantee the performance of the antenna while miniaturizing it per our customers’ demands,” Xiaohui said. The second is reducing the size and weight of antennas with anti-multipath technology, “so as to boost the applications of high-precision positioning GNSS technology.”
Trimble
An external Trimble antenna helps the GeoXR handheld achieve survey-grade accuracy. (Photo: Trimble)
Key Markets. “Trimble’s core technologies in positioning, modeling, connectivity and data analytics enable customers to improve productivity, quality, safety and sustainability,” said Stuart Riley, vice president, GNSS Technology. “From purpose-built products to enterprise lifecycle solutions, Trimble software, hardware and services are transforming industries such as agriculture, construction, geospatial, transportation and logistics, rail, forestry, utilities and autonomous applications.”
Specific Challenges. Each application has different requirements, Riley said. “For applications that require the highest position accuracy, the stability of the phase center, multipath mitigation, and the unit-to-unit production consistency are critical,” he said. Some customers require high performance in challenging environments — such as the high vibration experienced on construction equipment — while others require smaller, lower-cost antennas and can tolerate a slight reduction in accuracy. “The antenna is typically a combination of a passive antenna element with an active low noise amplifier (LNA),” he said. “The LNA needs to be carefully designed to remain linear in the presence of in-band jamming while rejecting out-of-band signals. There are size and cost trade-off challenges to the filter roll-off at the band edge that need to be managed.”
Key Innovations. For high-precision applications, Trimble first released the Zephyr series of antennas in the late 1990s. “It provides excellent phase center stability and unit-to-unit production repeatability, and has exceptional multipath mitigation performance, which is enhanced in the geodetic version,” Riley said. Since first introducing the antenna, Trimble has added support for additional GNSS systems and RF bands (L1/E1, L2, L5/E5 and L6/E6), transitioned to a RoHS-compliant manufacturing process, improved the LNA performance, developed rugged versions for construction vehicle mounting, and produced a smaller version used in the Trimble R10, R12 and SPS986 GNSS receivers.
“More recently,” Riley said, “we developed a lower-cost high-performance antenna for the Trimble Catalyst software-defined GNSS receiver for Android phones and tablets, as well as an antenna in the Nav-900 guidance controller for agriculture that implements a metamaterial design. Looking forward, we expect to continue to innovate by providing antennas that meet the needs of the different markets we serve. Each application has unique requirements, which require us to balance the cost, performance and size to develop the appropriately optimized product. Enhancements will include novel antenna architectures, production technique improvements, and careful material selection.”
Technical Challenges. Trimble users have a wide variety of requirements, Riley said. “The challenges come in balancing the seemingly conflicting needs for performance, size, weight and cost. Because Trimble focuses on specific user segments, we can provide antenna solutions that are the best fit for the various applications. For example, an antenna in a handheld device must be small and lightweight; however, on a construction machine, durability takes precedence over size and weight.”
Topcon Positioning Group
The Sokkia GCX2 receiver integrates a helical antenna. (Photo: Topcon)
Key Markets.Topcon Positioning Group is a leading designer, manufacturer and distributor of precision measurement and workflow solutions for the global construction, geospatial and agricultural markets, according to Alok Srivastava, director, product management. “By integrating high-precision measurement technology, software, services and data, Topcon has a vision to improve productivity to meet global demand for sustainable infrastructure and agriculture,” Srivastava said.
Specific Challenges. The physical challenges when designing an antenna for geomatics applications have been multipath and interference mitigation, Srivastava explained. “Topcon has an advanced research and development team that focuses solely on antenna designs. The team dedicates its efforts to providing state-of-the-art antennas for all positioning needs.”
Key Innovations. “Topcon was very early in realizing the growing needs for radio spectrum and the challenges it may bring to GNSS technology,” Srivastava said. “It has innovated and used filters to mitigate interference from Japan LTE signals for a long time.”
Topcon’s antenna team is “among the most innovative in the industry,” Srivastava said, and “has brought many unique designs of antennas over the years. The antenna is a key element of an integrated receiver in dictating the design of the whole receiver.” With the release of the Sokkia GCX2 receiver, he explained, his company introduced to the industry the integration of a helical antenna into a high-performing integrated receiver.
Its infrastructure antennas, the CR-G5 and PN-A5, are available with options including cavity filter technology. “The cavity filter has the superior ability to minimize near-band interference,” Srivastava said. Topcon’s antenna farm at the Concordia test site in Italy contains an absolute calibration robot, a large format antenna (BigAnt) for a high-quality geodetic ground station, and patented technology for controlled testing of GNSS technology in artificial obstructions.
“Vibration mitigation is the key when an antenna is mounted to a piece of machinery,” Srivastava said. “Topcon antennas are an integral component of our Quartz Lock Loop (QLL) technology for robust GNSS operation in high-vibration environments.”
Technical Challenges. The importance of antennas can be underestimated, Srivastava pointed out, especially with rapidly growing interest in GNSS technology in consumer applications. “The antenna is one of the most critical technologies when it comes to reliable and robust GNSS positioning. Designers and manufacturers of antenna technology with years of experience understand the seriousness of this task, and are fully equipped to deliver results without compromising quality and performance.”
NovAtel
The VEXXIS family of GNSS antennas. (Photo: NovAtel)
Key Markets. Key antenna markets for Hexagon’s Autonomy & Positioning division are split into three areas, according to Dean Foster, director of hardware engineering. His area includes the company’s anti-jamming antenna technology (GAJT) and robust SWAP-C antennas. The other two are precision and SMART antennas for agriculture, mining, survey and autonomous vehicles (Vexxis, SMART7, and GNSS 1500), and reference GNSS antennas (GNSS750 and ANT-C2GA).
Specific Challenges.NovAtel’s antennas address three main challenges. First, jamming and interference, whether intentional or unintentional, are becoming increasingly commonplace and seriously impact GNSS reception. “These issues are addressed by our GAJT product line of high-precision anti-jamming antennas, which can mitigate multiple jammers simultaneously,” Foster said. Second, “the stability and precision of the antenna’s phase center is critical to deliver robust and precise GNSS position even in challenging environments, which is addressed by our Vexxis GNSS-800 antennas.” Finally, more frequent use of GNSS in environments with reflection issues is making multipath rejection critical. “The entire line of NovAtel antennas, including Vexxis, SMART and GAJT, ensures use of the most direct signals.”
Key Innovations. Driverless vehicles require sub-meter-level positioning for lane-level resolution. “Multi-constellation/multi-frequency GNSS with protection limits and correction services are necessary to move forward safely,” Foster said. “This technology does not work with the smallest size, single-frequency, narrow-band antennas that cars currently utilize, so we’re building on our deep experience and knowledge to develop production-grade automotive antenna technologies.” An emerging requirement is reducing size, weight, power and cost (SWAP-C). “In the defense market, we first offered jamming and interference mitigation with the GAJT-710, which progressed to the GAJT-AE, and most recently we launched the GAJT-410.”
Technical Challenges. All markets want the smallest, most robust and cost-effective antenna to meet their needs, Foster said, adding that NovAtel is helping customers work through how to select, place and integrate antennas into their platforms to address real-world problems.
The prevalence of intentional and unintentional GNSS interference has sparked quick evolution in antenna technology, including the emergence of breakthrough technology in 2019 and new advancements in development, said Imtiaz Bahadur, product line manager.
Specifically, the drive to advance antenna technology is due to “an increased demand for broader coverage, stringent industry compliance, and a need for robust capabilities.”
Key Innovations. Among recent innovations in antenna technology, Bahadur cited GPS antennas with support for dual-frequency multi-constellation compliance with Global Aircraft Traffic Management (GATM) mandates to enable military aircraft to operate in controlled airspace, and antennas that offer broader band coverage.
In 2019, Cobham introduced the 20-2041 Fixed Reception Pattern Array (FRPA) GPS antenna, which addresses all three of these priorities, said Darren Windust, product manager – air. The L1/L2 dual-frequency GPS antenna is certified to both ETSO-C190 and MSO-C144. “In conjunction with a certified receiver, the 20-2041 offers a single solution to comply with GATM regulations to access controlled airspace and undertake GPS precision approach and landings, in a standard 3.5-inch form factor.”
Technical Challenges. “It’s clear that moving from one GPS signal to eight signals from four constellations in support of performance-based navigation is going to be the next major disruptor because of the significantly expanded signal power and highly efficient design,” Bahadur said. The quest to make antennas smaller also continues. “Today, there are physical limitations on how far one can miniaturize the antenna while ensuring sufficient gain is received. Research and development efforts are underway to build ‘smart antenna’ concepts for the future. Moving into the next few years, robust antenna capabilities will arrive in smaller, more efficient form factors.”
In the second part of our receiver feature, top receiver manufacturers discuss what’s on the horizon for GNSS receivers: recent and upcoming innovations, combating spoofing and jamming, fusing GNSS with other sensors, and the impact of increasing accuracy both for professional surveyors and consumers.
In January, we featured responses from NovAtel, Trimble, Unicore, Topcon, Hemisphere GNSS, CNC Navigation and Septentrio to questions about their recent and upcoming innovations in the design and manufacturing of GNSS receivers. We continue in this issue with responses to the same questions from Javad GNSS, Swift Navigation, Eos Positioning Systems, Tersus GNSS, TeleOrbit, Allystar Technology and NTLab.
All GNSS receiver manufacturers agree that spoofing and intentional and unintentional jamming are serious challenges. Their approaches to dealing with these challenges differ, however, as they rely on different combinations of technologies on both their receivers (such as monitoring cycle slips and using analog-to-digital converters, correlators and notch filters) and their antennas (such as using array antennas), as well as the new Galileo authentication service.
Photo: Tersus GNSS
Many receiver manufacturers now routinely use optical, inertial and other sensors — which continue to drop in price and increase in performance — to supplement GNSS signals where they are degraded or denied, especially in the automotive market.
Carrier phase positioning and correction services are increasingly improving the accuracy of survey stations and reducing their price. Meanwhile, submeter accuracy is spreading beyond surveying to other industries. Performance in challenging conditions also continues to improve, thanks largely to the increase in the number of GNSS constellations, available satellites and frequencies. (For a review of recent developments in antennas, see our companion article here.)
On the consumer side, the introduction of multi-frequency GNSS receiver chips, the increased use of correction services, and, in a few countries, the deployment of thousands of additional base stations will continue to increase the location accuracy of cell phones and other consumer devices, enabling new applications. However, in these devices size and cost limitations make antenna performance particularly challenging. (See Part 1 here.)
Javad GNSS
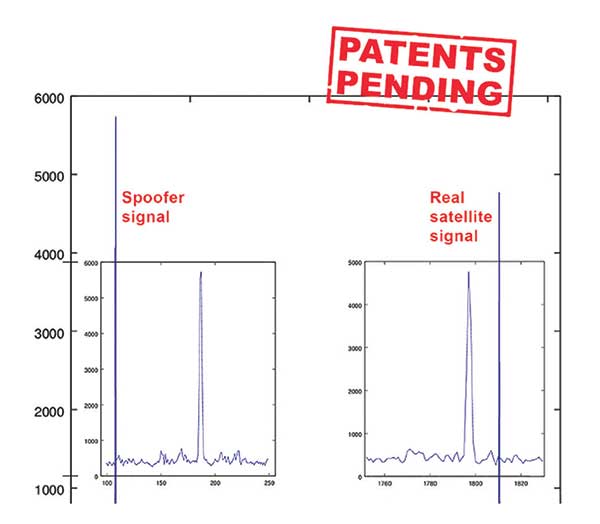
Jamming and Spoofing. “We protect you against jammers and spoofers like no one else can,” said Javad Ashjaee, founder and CEO of Javad GNSS. “We use multiple techniques to detect spoofers, the most important being the use of digital signal processing to detect more than one peak. First, with 864 channels and about 130,000 Quick Acquisition Channels in our Triumph chip, we have resources to assign more than one channel to each satellite to find all signals that are transmitted with that GNSS PRN code. If we detect more than one reasonable and consistent correlation peak for any PRN code, we know that we are being spoofed and can then identify the spoofer signals and ignore the wrong peak.”
An example of two peaks. (Chart: Javad GNSS)
Ashjaee described additional techniques:
The J-Shield filter blocks out-of-band interference.
Sixteen 255th-order FIR anti-jam digital filters protect against static in-band interference, and 16 adaptive 80th-order digital filters protect against dynamic interference.
Javad products measure the level of interference as a percentage of in-band noise above normal.
The Triumph chip has a powerful spectrum analyzer. Each spectrum shows the power and the shape of the interfering signals and jammers. This is more powerful and more efficient than using a commercial spectrum analyzer to evaluate the environment.
The chip also keeps a record of Automatic Gain Control, which is another indicator of external signals. A change in AGC can indicate interference.
Deviation of SNR from the expected value is another important indicator of interference.
“Usually there are over 100 signals available at any given time, and we need only four good signals to compute position. It is extremely unlikely that we can be spoofed without our knowledge.” Ashjaee concluded. “We will immediately recognize and take corrective actions.”
Jamming and spoofing protection is available on all Javad GNSS receivers and OEM boards. Read more about Javad GNSS’s jamming and spoofing protection in the December 2019 issue.
Sensor Fusion. “To support users in environments where GNSS RTK solutions are difficult or impossible to obtain,” Ashjaee said, “Javad GNSS has invented the J-Mate, which is a remotely controlled robotic EDM device and digital camera. GNSS RTK and optical can be seamlessly integrated using the J-Mate as the seventh RTK engine. Just set up a Triumph-3 on top of a J-Mate and a Triumph LS on top of a zebra rod, making the former pair the RTK base station and the latter pair the RTK rover.” Read more about Javad GNSS’s RTK and Optical United solution in the November 2019 issue.
Swift Navigation
Jamming and Spoofing. “Receivers have become more robust to intentional jamming by mimicking the jammers’ behavior to cancel it,” said Alex Pun, staff product manager for Swift. “Nevertheless, advanced jamming and spoofing mitigation often imply array antennas. A real evolution lies in considering these threats only in terms of the availability of the GNSS sensor, now part of a complete multi-sensor positioning engine such as Starling.”
Sensor Fusion. IMUs, visual sensors and GNSS will aid each other in different types of environments and scenarios, explained Pun. “Sensors are becoming more affordable, and their performance increases with each new generation. Sensor fusion will be the glue that will bind them to provide a precise positioning solution.”
Surveying. The combined use of carrier-phase positioning and correction services, such as Swift’s Skylark, will greatly improve accuracy and reduce the cost of survey stations, because they make their accuracy less dependent on the intrinsic performance of the receiver and the antenna, Pun said. “A global service eliminates the need for an individual base station.”
Consumer Devices. “The introduction of dual-frequency GNSS receivers from chip manufacturers will help improve positioning in cell phones and other consumer devices,” Pun said. “These chips, coupled with a widely available correction service such as Skylark, will greatly improve their performance accuracy to sub-meter levels.”
Other Challenges. Performance stability of the antenna and its characterization will become the main challenge to exploiting the new GNSS ASICs (application-specific integrated circuits) and correction services at their highest level of performance, Pun said. “A positioning engine can exploit this information to accelerate the convergence to the high-accuracy solution, and then improve its availability.”
Eos Positioning Systems
A surveyor uses the Arrow Gold receiver to map assets in Terrebonne, Quebec, Canada. (Photo: Eos Positioning)
“The past three years have seen considerable innovations and trends in the GNSS industry,” said Jean-Yves Lauture, CTO of Eos Positioning. “Receivers are becoming increasingly affordable and the adoption of higher-accuracy (submeter, centimeter) positioning by other industries, outside of conventional surveying, is growing. Considering the now four usable GNSS constellations and the aggressive launches of Galileo and BeiDou satellites, the number of available satellites and the list of frequencies they use has considerably increased.
“Although accuracy itself is not really improving, performance is — particularly in tougher conditions. It’s not uncommon for customers to use 30 to 35 satellites out of more than 40 in view using an Arrow Series GNSS receiver. The numbers are even higher in the Pacific regions, thanks to geostationary BeiDou satellites. This is, by far, more than double the number of satellites available with just GPS and GLONASS.”
Consumer Devices. “It will be challenging for smartphones and consumer devices to achieve survey-grade accuracy in the next few years. They face certain limitations. For instance, there is a cost and physical size associated with using a high-end GNSS antenna with a minimum of ground plane to achieve these levels of accuracy.
The Arrow Gold RTK GNSS receiver. (Photo: Eos Positioning)
“Also, it is unlikely that the manufacturers of consumer devices will invest in developing the advanced algorithms needed for a high level of constant accuracy and performance. In order to fit into a smartphone, consumer-grade GNSS chipset manufacturers must drop the use of many available signals and frequencies to keep both size and power consumption to a minimum.”
Allystar Technology
Photo: Allystar
Jamming and Spoofing. The GNSS chip in Allystar’s TAU1301 module supports eight adaptive notch filters to reduce the effects of GNSS jamming, explained Shi-Xian Yang, senior principal engineer in the company’s Baseband Algorithm Department. “It significantly improves the performance of GNSS tracking measurements, even in the presence of strong and fast-varying jamming signals.”
Sensor Fusion. The TAU1310 integrates a six-axis micro-electromechanical system (MEMS) gyro, which makes its affordable for the mass market, Yang said.
The Lenovo Z6. (Photo: Lenovo)
Consumer Devices. In its Z6 smartphone, Lenovo has taken advantage of the great improvement in multipath mitigation provided by the L5 signal’s higher chip rate and the output of high quality raw data via the TAU1302’s HD8040 GNSS chipset to improve the accuracy experience in the consumer market, Yang explained. Additionally, he pointed out, cell phones and other consumer devices now enable developers to access the raw sensor data from such sensors as accelerometers and barometers to input into their fusion algorithms.
Other Challenges. In the future, the TAU1310 could also support the L6 signal for PPP-RTK application.
NTLab
NTLab anti-jamming GNSS receiver. (Photo: NTLab)
Jamming and Spoofing. The problem of jamming and spoofing worries customers, according to Konstantin Yuriev, lead GNSS engineer at NTLab. The combination of anti-jam and anti-spoofing is in greater demand because the anti-jam feature alone is becoming insufficient. Yuriev cited the European Union’s new requirements for the European Railway Traffic Management System (ERTMS), which makes anti-spoofing mandatory.
The key issue today is “the solution to the problem of reducing the size and cost of anti-jam receivers, so that they become available to consumers on the civilian market. The key technology for this will be increasing the degree of integration of the component base, first creating a chipset for solving anti-jamming and anti-spoofing tasks, and then moving on to a single-chip solution. We have created a chipset and are ready to start work on the further integration into a single chip.”
Sensor Fusion. The traditional task of integrating data from a GPS antenna and a MEMS sensor has been solved, Yuriev said, with many such solutions on the market. One task is to track the antenna’s tilt. “The antenna, GNSS receiver, and MEMS sensors should be located very closely to each other — if possible, on a single small board,” Yuriev said. “Here, again, the solution is to increase the degree of integration, up to placing the baseband processor on the same chip with the digital CMOS circuitry of the MEMS sensor.” Another application of MEMS is serving as the core of an inertial navigation system (INS), providing an auxiliary subsystem for detecting the presence of spoofing. “This is more of an algorithmic task,” Yuriev said, “because traditional coupling using recursive filters is not enough. It is necessary to ensure the independence of the INS subsystem from the GNSS solution, or their intelligent mutual cross-control.”
Surveying. A major part of the cost of a survey-grade device, Yuriev pointed out, is for additional services, know-how, and other added values. There is market demand for a business model in which device price could go down while maintaining the main values for the customer. “This could be achieved if end-users tightly cooperate with hardware manufacturers, skipping third-party integrators. Alternatively, multiple third parties could compete, keeping the cost of the software low. One of the technical solutions for this is to provide software application programming interfaces (APIs) that will allow multiple third parties to offer application-level software for the same hardware. We call it the ‘open platform’ approach. One of our products implements this strategy.”
Other Challenges. Despite some skeptics, Yuriev argued, new GNSS systems have been successful. “A good example is IRNSS (NavIC), with India’s population of 1.3 billion forming a potential market. Moreover, according to our studies, good coverage is provided not only in India’s territory. We are working on creating an economically affordable solution with support for the NavIC S-band. A new chip-scale packaged RFIC (radio-frequency integrated circuit) should minimize the size, consumption, and price of NavIC-oriented modules, while maintaining all the advantages of the S-band signal in areas close to the equator. This is our solution to the problem.”
TeleOrbit
GOOSE platform. (Photo: Fraunhofer IIS)
GNSS Receiver Development Platform. The company’s GOOSE platform is a field-programmable gate array (FPGA)-based GNSS receiver, developed by Fraunhofer IIS, making it flexible in processing new or proprietary signals, according to Katrin Dietmayer, software development engineer at Fraunhofer IIS. “It comprises 60 hardware channels in real time and provides an open software interface for customer applications,” she explained.
Jamming and Spoofing. “It grants deep access to the hardware interface, down to, for example, the correlation values. Additionally, anti-jamming functions (such as notch-filter or pulse-blanker) can be added and anti-spoofing algorithms are already implemented. Thanks to the open architecture, our customers can also implement these or other algorithms.”
Sensor Fusion. Vector tracking in real time is already implemented on code base. Deep coupling with INS/IMU multi-sensor fusion — for example, with an odometer, ultra wideband or 5G — are possible and under development, Dietmayer said.
Surveying.TeleOrbit provides GNSS-RTK using RTKLIB. “The implemented Open GNSS Receiver Protocol (OGRP) is fully documented with a parsing tool using CONVBIN from RTKLIB as RINEX converter,” Dietmayer explained.
Consumer Devices. GOOSE is also used as the reference receiver in the ESA project Receiver Technologies for Future Mass Market (RT4FMM) devices. The project validates state-of-the-art dual-frequency mass-market receivers based on Broadcom BCM47755 and u-blox F9 and compares their performance against GOOSE E5AltBOC processing.
Other Challenges. GOOSE already processes the new Galileo OS-NMA (Open Service – Navigation Messages Authentication), while implementing the new Galileo High Accuracy Service (HAS) is on the roadmap. “The combination of these new features will result in a robust and reliable high-accuracy position,” Dietmayer said. “For system testing, the intermediate frequency signals can be recorded, processed and replayed with the platform.”
Tersus GNSS
The Oscar. (Photo: Tersus GNSS)
Jamming and Spoofing. Xiaohua Wen, founder and CEO, said his company has done much research and testing on jamming and spoofing. “We already implemented a high dynamic analog-to-digital converter to overcome jamming. To mitigate spoofing, we think that internet of things (IoT) devices can leverage cloud services. Alternatively, the new Galileo authentication service may serve the same function.”
Sensor Fusion.Tersus GNSS makes an INS product, and its Oscar receiver contains an inertial measurement unit (IMU). “The sensor fusion hub is a very hot topic in the automobile industry,” Wen said. “We are quickly adapting our Oscar and INS product line for the creation of high definition maps and for indoor navigation. We think it’s still the major pain point for a crowded country such as China.”
Surveying. As has been the case in many other industries, Wen said, the widespread adoption of GNSS technology and the increase in the number of players in the field has led to a drop in prices. “Tersus’ David and Oscar models are low cost but still perform well compared with Tier 1 players for professional survey machines using our own OEM GNSS board,” he said.
Consumer Devices. The fact that a few vendors are providing dual-frequency chipsets in smartphones opens the door for consumer-grade sub-decimeter applications, Wen said. “But we think the antenna could be a big challenge for the small devices.”
Other Challenges. “Mobile carriers are building thousands of base stations,” Wen said. “For example, Softbank in Japan completed 3,300 stations this year. China Mobile just issued a bid for a phase one project for 4,400 stations. We think mobile phone innovations for the new high-accuracy application may have some impacts in the coming years. We have been actively looking at some new GIS (geographic information systems) applications based on our in-house Nuwa platform.”
Top receiver manufacturers discuss what’s on the horizon for GNSS receivers. The companies reveal recent and upcoming innovations, how to combat spoofing and jamming, fusing GNSS with other sensors, and the impact of increasing accuracy both for professional surveyors and consumers.
With regard to jamming and spoofing, the preferred approach is a combination of monitoring, detection and filtering. However, shielding, the use of IMUs and other third-party sensors, and advances in processing algorithms also help mitigate interference. In a few years, hopefully, encrypted or “watermarked” signals will substantially reduce this problem.
IMUs and other sensors are now routinely integrated with GNSS receivers, with their outputs fused. This trend is largely propelled on the demand side by the needs of the emerging market for autonomous vehicles and on the supply side by smaller, cheaper and more accurate IMUs and lidar scanners. Meanwhile, developments in algorithms have improved the modeling of errors to correct for the inherent tendency of IMUs to drift. Additionally, digital cameras, lidar and other industry-specific sensors are increasingly common, especially for collision avoidance in human-machine interactions.
In surveying, the use of all constellations and frequencies, as they become available, is an industry trend. Costs will continue to drop as the growth in the adoption of GNSS solutions enables manufacturers to take greater advantage of economies of scale. Precise point positioning (PPP), which benefits greatly from the growth in GNSS constellations, is now giving real-time kinematic (RTK) positioning a run for its money. Available applications enable Android mobile devices to achieve centimeter accuracy, while innovations continue in core positioning algorithms.
In the world of mobile consumer devices, dual-frequency, multi-constellation GNSS chipsets are increasingly prevalent. As increased accuracy fuels expectations for even higher accuracy, precision positioning may become the norm in the consumer space, and new applications for these devices may emerge. Already, crowdsourcing the monitoring of both GNSS signals and interference helps improve accuracy for everyone, in a positive feedback loop.
Other notable trends include the introduction and expansion of 5G data networks, the increased use of satellite-based correction services, and continued efforts to develop precise positioning for indoor areas. (See part 2 of this feature here.)
Topcon
Jamming and Spoofing. “We continue to develop and deploy patented technology to detect spoofing,” said Alok Srivastava, director, product management. “We already have cutting edge GNSS antenna technology to provide stellar support for interference rejection and filtering.” All Topcon end products have this advanced antenna and filtering technology.
Sensor Fusion. “Topcon has been using inertial systems for decades for a variety of positioning applications — such as machine control, mobile mapping, and agriculture,” said Srivastava. “In recent years, advancements in IMU technology have progressed to where the size and cost of these sensors are at levels to be utilized at a larger scale. For example, the recently released Topcon HiPer VR takes advantage of inertial technology to improve productivity in real time with our Topcon Integrated Leveling Technology (TILT), which compensates for mis-leveled field measurements out of plumb by as much as 15 degrees.”
Surveying. Topcon continues to invest in its core positioning algorithms to innovate such features as quartz lock loop, advanced multi-engine platform, and VHD heading technology into its positioning engines, Srivastava said. “We also produce solutions such as our Millimeter GPS and Hybrid Positioning innovations, which are designed around improving accuracy, higher reliability, and greater flexibility by converging positioning technologies.”
Consumer Devices. “GNSS in consumer devices and other commercial systems is used to aid other positioning sensors,” Srivastava said. “So, it may not be in the best of interest to offer that level of accuracy from GNSS alone.”
Other Challenges. Precise indoor positioning is a requirement of the vertical construction industry. “Topcon’s combined optical instrument takes a unique approach to solve that problem by integrating a compact laser scanner with a fully featured robotic total station,” Srivastava said.
Photo: CHC Navigation
CHC Navigation
Jamming and Spoofing.CHCNav is currently taking a twofold approach to GNSS interference, said François Martin, vice general manager, International Division. “As a GNSS system integrator, we focus our design around strong electromagnetic shielding and sealed isolation chambers.” Additionally, he pointed out, the advanced filtering of GNSS signals and an antenna patch produce optimal interference mitigation.
Sensor Fusion. Integrating interference-free, high-dynamic IMUs instead of MEMS has brought the full benefits of tilt compensation to users, Martin said. The latest development in algorithms dramatically obviated the need for the annoying process of initializing GNSS IMU receivers and boosted the availability of GNSS RTK in demanding environments.
Surveying. The fast adoption of GNSS solutions by large user segments has reduced costs by enabling a sizable manufacturing economy of scale, Martin pointed out. “Tighter combination of embedded technologies such as GNSS and connectivity modules are sustaining that cost reduction process.”
Consumer Devices. “The emergence of dual frequency multi-constellation GNSS chipsets supports the development of untapped user segments, but the position accuracy repeatability remains an issue,” Martin said. “The integration of GNSS chipset and high-performance helical antennas, as precision add-on modules, onto rugged Android cell phone and tablets is creating a prosumer-grade centimeter to decimeter accuracy answering to a wide range of mobile workforce applications.”
Other Challenges. A growing number of positioning and navigation applications require the fusion of technologies to increase productivity, Martin said. “The integration of advanced tightly integrated positioning algorithms, scanners, IMUs, HDR cameras, IoT and cloud-based connected solutions are a clear trend.” However, their adoption by a large user base remains limited by their current price point.
Photo: Septentrio
Septentrio
Jamming and Spoofing. “Recent developments in receiver-antenna combinations maximize the benefits of anti-jamming techniques,” said Gustavo Lopez, market access manager. Third party sensors, such as IMUs, also help mitigate interference, he pointed out. “Septentrio’s advanced receiver technology such as AIM+, a standard feature on all the company’s products, bring not only real time monitoring but also jamming/spoofing mitigation. Galileo and GPS have clear roadmaps bringing signal authentication in order to avoid spoofing.”
Sensor Fusion. Smaller IMUs with higher grade performance now on the market are enabling new use cases in autonomous applications, said Lopez. Other important elements are a new generation of compact high-performance sensors and the growing importance of multi-sensor technology “to provide even higher levels of positioning integrity.” He cited Septentrio’s AsteRx-i family of products as an example of GNSS/INS integrated solutions.
Surveying. As an example of Septentrio’s survey-specific products, which “continuously benefit from advanced developments being rolled out in our platform,” Lopez cited the Altus NR3.
Consumer Devices. The increasing positioning accuracy of cell phones, Lopez pointed out, “has spurred innovations such as PPP and the use of mobile phone measurements,” as well as “other purposes, such as interference detection and crowdsourcing.”
Other Challenges. “Sensor fusion is a key element in positioning and orientation,” Lopez said. “Easy integration is a key element in this trend. Also, integrity in error reporting and positioning will be required as well as reliable raw measurements which can be integrated with other sensors. This drives the requirement for receivers capable of running customer proprietary software. Another important element will also be the possibility of running positioning algorithms on a third-party processor.”
Photo: Hemisphere GNSS
Hemisphere GNSS
Jamming and Spoofing. “Hemisphere’s new Lyra II ASIC platform used in our Phantom and Vega series positioning and heading boards,” said Miles Ware, director of marketing, “introduces new technology and filtering methods to identify and mitigate known and unknown interference sources that typically have an adverse effect on GNSS performance.”
Sensor Fusion. “Advancements in IMU integration and sensor fusion,” Ware said, “will continue to be a key focus for Hemisphere to support the growth and adoption of the expanding autonomous vehicle and application marketplace. The positioning and heading technology offered in our Vega 28 will be a core component for autonomous marine, machine control, and agriculture solutions for new and emerging markets.”
Surveying. “Access to modern and future signals like BeiDou Phase III, ALTBOC and BS-ACEBOC significantly enhance GNSS accuracy, especially in challenging environments where satellite visibility is compromised by the topography and or the structures present,” Ware pointed out. “Survey solutions that can not only track but also use all the available GNSS measurements in their RTK solution will have a substantial advantage in the market.”
Consumer Devices. “As mobile phones and consumer devices continue to adopt hardware designs that can access the latest GNSS signals,” Ware said, “the opportunities for solutions where high precision measurement engines can be hosted within mobile devices opens up a new realm of solutions that can leverage the high accuracy positioning performance found in Hemisphere technology and products. We see this as a very exciting and emerging area.”
Other Challenges. Ware pointed to “leveraging GNSS technology to further support environmentally friendly transportation solutions and sustainable agriculture,” for which GNSS continues to be an integral component.
Photo: Unicore
Unicore Communications
Sensor Fusion. “We are implementing GNSS with different level IMUs, including low-cost and high-end, targeting automotive, intelligent driving, and robot application scenarios,” said Gao Jingbo, marketing director. “The algorithm can also integrate with the already-existing sensors on the platform, such as IMUs, cameras and odometers. The solution can be done on the GNSS side, with high information synchronization accuracy, or processed on the platform.”
Surveying. Products with Unicore boards inside can provide centimeter- to millimeter-level positioning accuracy, said Jingbo. “Unicore’s high-precision boards and modules can track all frequencies of all satellite systems. The UGypsophila RTK technology can make the most of the observation data of all frequencies in all systems even without the observations of the base station in the RTK solution, thus greatly improving the usability, reliability and accuracy of RTK.” The company is now also working to reduce the dimensions and cost of its products, Jingbo pointed out. “With Unicore’s single GNSS SoC on board, the UB4B0M and UM4B0 modules are making affordable high-end high precision surveying possible.”
Consumer Devices. Algorithms and hardware are ready now to implement PPP+RTK in cell phones, Jingbo said, and this increase in positioning accuracy will enable many more applications. “We have rich experience in high precision GNSS, but the antenna might be a challenge. Our new generation 22 nm GNSS SoC features low power consumption and support of sensor fusion. Additionally, true point technology by Rx-Networks (also a BDStar company) can provide sub-meter data service, which also enables users to access centimeter-level accuracy location data through their mobile phones and wearable technologies, without increasing the demand for processing power.”
Photo: Trimble
Trimble
Jamming and Spoofing. “Trimble’s latest GNSS receivers leverage our seventh-generation Maxwell technology, which implements hardware- and software-based techniques to detect and mitigate spoofing,” said Stuart Riley, vice president, GNSS Technology. “In addition, Trimble continues to improve the robustness of our GNSS receivers with advances in processing algorithms and hardware enhancements such as the integration of inertial technology.”
Sensor Fusion. “For many years, IMUs have been widely used in Trimble agriculture and Applanix products,” Riley said. “Over the past few years, we’ve created a new line of lower-cost inertially integrated board-level GNSS receivers. We have also integrated inertial components into survey and construction products, including tilt compensation in the Trimble R10, R12 and SPS986 receivers. Trimble also combines its GNSS solutions with optical, laser, lidar and other sensors.”
Surveying. Trimble’s GNSS products, Riley pointed out, range from GIS handhelds to high-performance mobile mapping systems.
Consumer Devices. “The Trimble Catalyst system uses Android-based smartphones or tablets to run an application that includes a software-defined GNSS receiver,” Riley said. “The recently introduced SiteVision system builds on this ecosystem and integrates Google’s ARCore platform with precision GNSS to provide an augmented reality solution for a variety of professional applications.”
Other Challenges. To address signal masking and multipath, Trimble has “continued to improve performance in difficult environments with products such as the Trimble R12 receiver, which provides sophisticated multipath mitigation and an advanced precision processing engine.” Riley said, “Trimble’s RTX Correction Services, delivered via satellite, enable users to achieve RTK speed and accuracy nearly anywhere on the planet without the need for local reference stations.”
Photo: NovAtel
NovAtel
Jamming and Spoofing. “The RF environment is at best crowded and at worst hostile,” said Sandy Kennedy, vice president of innovation, Hexagon’s Positioning Intelligence division. “The NovAtel OEM7 generation of receivers was launched in 2016, with interference detection and mitigation as key features on every variant. Protecting authenticity, availability, and precision for multifrequency measurements is the challenge going forward — in all segments of the system: constellation management and SIS, antenna, receiver design and processing in FW/SW.”
Sensor Fusion. In the last three years, Kennedy pointed out, IMU manufacturers have made significant improvements in the performance offered in smaller, cheaper IMUs. “At the same time, new methods to improve error modelling (to control positioning errors) have been added to the NovAtel SPAN product line, especially in SPAN Land profile. Extended GNSS outages are easily handled now.”
Surveying. “PPP has become a strong competitor to RTK, as convergence times have decreased, and this will continue in service offerings like Terrastar-X from NovAtel,” Kennedy said.
Consumer Devices. The devices, Kennedy said, offer “the tantalizing promise of quality measurements from a common utility device with huge computing horsepower and data connectivity built in! It’s fun to watch, and we shall see if accuracy is truly addictive enough to fuel development for general use of precision positioning.”
Other Challenges. “In the past 20 years, users have moved from awe and wonder that centimeter-level positioning is possible — to utter contempt when it is not,” Kennedy said. “This will continue, with an added requirement of integrity and functional safety. Continuously available positioning within a usable protection level is a requirement for autonomous vehicles.”
The 18,000-container-capacity CMA CGM Kuergelen. (Photo: CMA CGM)
Of the 273 papers researchers presented this year at the Institute of Navigation’s annual ION GNSS+ conference, which took place in Miami on Sept. 16–20, the following five focused on maritime issues. Papers are available at www.ion.org/publications/browse.cfm.
Automating the Sharing of Ocean Weather Data
The Automatic Identification System (AIS) — mandatory for large ships and used by many mid-sized ones — was designed to help avoid collisions, enable shore authorities to provide vessel traffic services, and allow coastal states to monitor their waters. It also may be used to transmit other information between AIS stations onboard and ashore.
In the aftermath of the sinking of the container ship El Faro in 2015, the U.S. National Transportation Safety Board (NTSB) and U.S. Coast Guard found a contributing factor was lack of reliable weather forecasts. The NTSB then recommended to the National Oceanic and Atmospheric Administration (NOAA) that it determine whether AIS could be used to share weather data collected by ships, to supplement the Voluntary Observing Ship (VOS) program where ships voluntarily submit weather observations to NOAA. The paper describes a successful test of this concept.
Citation. Gregory Johnson, Ken Dykstra, Gaurav Dhungana and Brian Tetreault, “Sharing Ships’ Weather Data via AIS.”
EGNOS for Maritime Navigation
The European Geostationary Navigation Overlay System (EGNOS), which has been providing guidance to civil aviation since 2011, also can support maritime, railway and road applications. This paper assesses its use for maritime navigation compliant with International Maritime Organization (IMO) requirements for harbor entrances, harbor approaches and coastal waters: 99.8% of signal availability, 99.8% of service availability, 99.97% of service continuity, and 10 meters of horizontal accuracy. A kinematic test campaign was conducted in the waters of the Canary Islands using a geodetic multi-frequency, multi-constellation receiver-antenna pair installed aboard two vessels. The EGNOS Maritime Service met all IMO requirements by achieving a signal availability of 99.999%, a service availability in 99.9% of a predefined rectangular region, and 1.06 meters of horizontal accuracy at the 95th percentile. The service continuity requirement, however, was met in only 62.50% of the predefined region. Therefore, the paper concludes that the continuity risk is the most limiting factor for expanding the EGNOS Maritime Service along the coastal waters of the Canary Islands.
Citation. Deimos Ibáñez Segura, Adria Rovira Garcia, Jaume Sanz, José Miguel Juan, Guillermo González Casado, María Teresa Alonso, José A. López Salcedo, Huamin Jia, Francisco Javier Pancorbo Garcia, Carlos Garcia Daroca, Irene Martin Calle, Santos Rodrigo Abadía Heredia and Manuel López Martínez, “A Kinematic Campaign to Evaluate EGNOS 1046 Maritime Service.”
Options for Integrity
Many maritime authorities are considering how to maintain the integrity of navigation systems as their infrastructure ages, especially given that the need for integrity in the user position is expected to increase with e-navigation services and for autonomous vessels. In harbor entrances, harbor approaches and coastal waters, the International Association of Marine Aids to Navigation and Lighthouse Authorities (IALA) prescribes an absolute horizontal accuracy of ≤10 meters 95% of the time, with an integrity risk of 99.99999%. Today’s GNSS more than meets that accuracy requirement, so the driver is integrity. Options for integrity are marine radiobeacon DGPS/DGNSS, the primary augmentation system in use today; receiver autonomous integrity monitoring (RAIM); satellite-based augmentation systems (SBAS); and others (such as commercial services or inertial.). The European MarRINav project is investigating resilient PNT options to support UK Critical National Infrastructure. Part of this work is comparing EGNOS and marine radiobeacon DGPS performance to inform international discussions and receiver standardization.
Citation. Alan Grant, George Shaw and Martin Bransby, “Considering SBAS and marine radiobeacon corrections to support safe maritime operations.”
Evaluation of WAAS for Use in Canadian Waters
Mariners navigating in Canadian waters use a ground-based augmentation system (GBAS) that provides differential corrections and integrity monitoring of GPS. This GBAS has been provided since 1994 by the Canadian Coast Guard (CCG) in the form of a differential GPS (DGPS) broadcast service. The service is only provided south of latitude 60°N in collaboration with the U.S. Coast Guard. Before embarking on a recapitalization program of its 24-year-old DGPS, and given that the U.S. Coast Guard is progressively shutting down its National Differential GPS sites, the CCG is evaluating options for its own DGPS network. Options include the wide-area augmentation system (WAAS), originally developed by the U.S. Federal Aviation Administration for civil aviation. This paper describes the authors’ evaluation for the CCG to determine the expected accuracy, integrity and availability of WAAS throughout Canadian waters, concluding that the current WAAS provides acceptable accuracy and integrity for most of Canada, excluding the higher latitudes.
Citation. Gregory Johnson, Gaurav Dhungana and Jean Delisle, “An Evaluation of WAAS 2020+ to Meet Maritime Navigation Requirements in Canadian Waters.”
GNSS + INS for Attitude Determination
Attitude determination (AD) is an important navigation component for ships and spacecraft. GNSS enables resolving their orientation in a precise and absolute manner, by employing multiple antennas rigidly mounted on the vessel. This requires carrier-phase observations, with the consequent added complexity of resolving integer ambiguities. Inertial aiding has been extensively exploited for AD, because it enables tracking fast rotation variations and bridging short periods of GNSS outage. In this paper, the fusion of inertial and GNSS information is exploited within the recursive Bayesian estimation framework, applying an Error State Kalman Filter, which, unlike common Kalman filters, tracks the error or variations in the state estimate, posing meaningful advantages for AD. The results show that the inertial aiding, along with a constrained attitude model for the float estimation, significantly improve the performance of attitude determination compared to classical unaided baseline tracking.
Citation. Daniel Medina, Vincenzo Centrone, Ralf Ziebold, and Jesús García, “Attitude Determination via GNSS Carrier Phase and Inertial Aiding.”
GPS signals are by far the single most widely used and most accurate source of navigation, positioning and timing (PNT), and this capability is deeply integrated into every aspect of our society. In particular, the timing service provided by GPS, while virtually unknown to the general public, is essential for a variety of digital operations — from performing financial transactions to operating cell phone networks to running the internet.
Of course, GPS — originally developed to guide nuclear submarines — is now vital to most military missions, and the system’s vulnerabilities are a source of great concern.
GPS has been remarkably reliable over the past quarter century. Solar flares are rare, multipath can be largely mitigated, and obstructed line-of-sight to the satellites is an acute problem only in certain environments, such as urban canyons.
The most serious intentional threats to GPS are spoofing and jamming. Jamming is more widespread — it is more easily accomplished intentionally and it also occurs unintentionally. In the defense sphere, intentional jamming is a regular occurrence. It is expected as a routine aspect of electronic warfare operations to disrupt and deceive, typically just before the shooting begins. Unintentional jamming includes recently re-emerging concern about potential interference by ultra-wideband devices.
Experts at NovAtel, Collins Aerospace, L3Harris Technologies and Honeywell address the challenges posed by jamming and the relative effectiveness of various anti-jamming approaches.
NovAtel
Tackling Jamming on Multiple Levels
Disruption by jamming of GPS’s PNT data “is occurring with a growing regularity,” said Dean Kemp, Defense Segment manager at NovAtel, part of Hexagon’s Positioning Intelligence division. The problem will only increase, given our reliance on GNSS and increasing demand for precision. In the military sphere, electronic warfare in Syria, as well as jamming in Ukraine, Korea, and Finland, “have shown that modern, high-power equipment is routinely being used to disrupt the military.”
In the civilian sphere, interference is a growing issue because of cheap and effective jammers available via the internet. People use these so-called personal privacy devices to defeat vehicle tracking devices for purposes ranging from avoiding supervision all the way to hijacking vehicles.
GNSS signals are vulnerable because the received power is so small that receivers can be disabled with an incident power in the picowatt (10-12 W) range. “Jammers come in many different forms,” Kemp said, “from low-power civil devices to complex and powerful military-grade electronic warfare systems that can disable civilian receivers from a few hundred meters to hundreds of kilometers.”
Situational Awareness. Users can fail to recognize that their GPS is being jammed, Kemp said. Beyond defending against possible jamming scenarios, it is also necessary to “identify, find, and characterize the source of interference and to provide this information to the user so that it can be used appropriately.” In the defense field, this is known as situational awareness.
Emerging jamming threats, Kemp explained, can be understood within the context of cyber and information warfare using the Cyber Electromagnetic Activities (CEMA) layered approach. It recognizes a cognitive layer — a human decision based on PNT data; a virtual layer, in which PNT data are used to inform or support networked systems; and a physical layer, the hardware used to provide and protect PNT data.
Therefore, effective anti-jamming requires that:
users understand the system’s vulnerabilities and identify when they are being jammed, so that they can resort to traditional means for positioning and navigation (but not timing)
PNT data be protected and verified before being trusted
on the physical level, there be a multi-layered and heterogeneous approach that provides assured PNT information in the presence of jamming and spoofing without quantifiable loss of accuracy.
By combining these considerations at each layer, “they form a unified view on capability,” Kemp said.
Spoofing with Pokémon. Jamming threats are evolving, employed by both civilian and state actors. Worse, these threats are augmented by spoofing. While spoofing is harder to achieve than jamming, it is potentially more concerning. “Spoofing the receiver by rebroadcasting the GNSS signals or by generating them from a simulator has become a regular occurrence,” Kemp said.
Spoofing came to public attention in 2016 when enterprising programmers designed location-deception apps to hack the Pokémon Go mobile game. Instances have since been reported worldwide. Because early spoofing demonstrations were conducted against simple GPS L1 C/A-code receivers, it was initially hoped that spoofing could be defeated by using dual- or multi-frequency receivers.
However, it has been demonstrated that multi-frequency receivers using commercially available components can also be spoofed, “at least when the receiver is using multiple frequencies of GPS,” Kemp noted. “Adding further GNSS signals will help, but the best defensive measure is to employ, if authorized, an encrypted military signal.”
Coverage Improvement Factor. Typically, the effectiveness of an anti-jam system is assessed on the basis of the jamming to signal ratio (J/S) figure in decibels, which depends on variables such as the receiver’s front-end RF bandwidth, the signal type being tracked (C/A versus P(Y) code), the signal tracking threshold of the receiver, the receiver platform dynamics, the choice of receiver oscillator, the interference type and antenna characteristics.
Difference in how manufacturers calculate J/S led to the invention of the coverage improvement factor (CIF), adopted by the GPS Joint Project Office. “CIF gives a single number that describes the effectiveness of an anti-jam system for a particular jammer scenario, given that space vehicle positions vary by elevation and azimuth,” Kemp said.
However, the use of CIF to assess the anti-jam performance is a highly technical process and the results are usually classified. He discussed current approaches to anti-jamming.
Multi-element, controlled reception pattern antennas (CRPA), which pass the good signal to the receiver while nulling out the interference, are the first line of defense. “The system can dynamically change the gain pattern of the antenna so that as the platform and jammers move, the gain pattern adapts so that nulling continues effectively.”
The use of multiple constellations and frequencies can be an effective tactic to mitigate interference, “but relies on the jammer not covering the bands of interest.”
“Obtaining actionable data on interference is almost as important as mitigation,” because it enables users to modify plans. However, “interference effects can be difficult to diagnose and complicated to track down.”
Monitoring automatic gain control can indicate jamming.
“Coupling a GNSS receiver with a robust inertial measurement unit (IMU) will provide a higher level of protection for GNSS signals due to the IMU providing reliable position, velocity and attitude even through short periods when satellite signals are blocked or unavailable.” However, IMUs are liable to drift, resulting in degraded performance.
There are many approaches to designing anti-jam systems. They must be balanced against user requirements, which vary significantly. “A layered approach is the best form of defense against jamming and spoofing,” Kemp said, starting with protecting the incoming GPS signal. “One of the highest levels of protection is from an anti-jam antenna system paired with a GNSS receiver that is tightly coupled with an IMU.”
Finally, given that jamming attacks are now to be expected on the battlefield, it is critical to train users on the best response.
Collins Aerospace
Artist’s concept: Collins Aerospace
A Potent Triumvirate of Tools
While sources of deliberate jamming are on the rise, the vast adoption of GPS means that “even the non-deliberate sources of jamming will have an asymmetric impact on end users,” said Sai Kalyanaraman, Ph.D. and Technical Fellow at Collins Aerospace. Challenges posed by jamming depend on the receiver, mission and performance needs, while the source of unintentional jamming could be “something as simple as a TV antenna that is transmitting harmonics into the GNSS band.”
Kalyanaraman outlined viable approaches to interference mitigation and anti-jamming:
Integration with inertial navigation systems (INS) can provide the platform’s attitude, which is required for beam forming. This, in turn, is required for some of the CRPA GNSS Anti-jam signal processing modes. It can also alert the user of jamming when the INS position diverges dramatically from that provided by the GPS receiver.
Use of multiple frequencies is a form of robust design against interference.
For authorized users, M-code will provide additional limited capabilities against jammers.
Integration of GNSS with other PNT sensors to help address GNSS-denied environments.
GNSS signals have the advantage that the true signal is well under the noise floor; therefore, “as long as you can characterize the noise floor adequately from the receiver design/installation perspective, anything that shows up above the noise floor typically does not belong in that slice of the spectrum,” Kalyanaraman said. Combining a CRPA, a platform orientation sensor (like an INS), and a GPS/GNSS receiver, “you have a fairly potent triumvirate of tools that you can use to help mitigate the impacts of jamming and potentially spoofing.”
Collins produces multiple variants of its digital integrated GPS anti-jam receivers (DIGAR). “Depending on which variety you choose, you can essentially have a receive apparatus that can perform basic nulling all the way up to beam-forming and direction finding and help provide resiliency against high jamming signal levels and other threats that emulate a GNSS-like signal in space,” Kalyanaraman said.
L3Harris
L3Harris develops gun-hardened anti-jam solutions for the M1156 Precision Guidance Kit Modernization program. The kit turns 155-mm artillery shells into smart weapons. Here, soldiers test the kit for accuracy. (Credit: U.S. Army/Spc. Robert Porter)
Field Tests Verify PNT Reliability
Dealing with deliberate and unintentional interference with GPS requires agreeing on the level of enhancements required, reducing the time and cost needed to integrate them into systems of systems, and “centralizing PNT generation and distribution functions on a platform to reduce user equipment redundancies and increase the leverage of future PNT enhancements,” said Dave Duggan, president of the Precision Engagement Sector at L3Harris Technologies.
The increase in interference “creates a cascading negative effect to PNT client mission systems,” Duggan said, including the systems of systems for sensing, maneuver and fires [military-speak for the use of weapon systems].” The capability of anti-jam countermeasures “scales across a range of performance, size, weight, power and cost points and can be tailored to a given threat space, improving the performance of even legacy user equipment.”
Spoofing, which inhibits receivers from forming a solution or, worse, tricks them into passing misleading PNT solutions to other systems, is a bigger challenge than jamming because it can result in aborted missions and loss of life and usually requires new receivers, Duggan said.
Duggan defines a reliable anti-jam/anti-spoof capability as one that “provides a PNT solution with a high level of confidence in its accuracy, authenticity and integrity for their applications and anticipated threat environments — all at a reasonable cost/performance point.” Confidence in the solution requires “extensive analysis, threat modeling, simulation and testing of the anti-jam/anti-spoof capability.” For this reason, “L3Harris has worked extensively in developing simulation and testing environments of the highest fidelity and continues to participate in numerous live field test events to establish that foundation.”
L3Harris develops and produces digital anti-jam antenna electronics for U.S. and allied end use.
Honeywell
Honewell’s HGuide micro-electro-mechanical system (MEMS) inertial measurement units (IMUs) and INS are designed to be integrated with GNSS receivers. (Photo: Honeywell)
Integrating GNSS with Inertial
Heightened awareness of intentional and inadvertent jamming threats has less to do with new types of threats and more to do with the increased importance of precise PNT coupled with more frequent instances of jamming, according to Chris Lund, senior director, HGuide Navigation and Sensors at Honeywell Aerospace.
“As applications become more reliant on highly accurate and reliable position and timing information provided by navigation systems, the consequences associated with the data not being available or not being correct quickly escalate,” Lund said.
The best way to measure the impact of a jamming threat and the capabilities of countermeasures is “to determine in actual real-world use cases whether the desired application outcome can still successfully be achieved,” Lund said.
The most promising approach to anti-jamming is integration of GNSS receivers with inertial navigation systems (INS) and other PNT systems. “Given the complementary aspects of many of the available approaches in the anti-jamming toolkit, it’s often best to leverage however many tools are available and needed to allow the application to achieve its desired outcome,” Lund said.
The billions of interconnected devices and sensors embedded in other devices, vehicles and even humans that collectively constitute the much-heralded internet of things (IoT) collect and share data used in myriad applications. This requires them to know their location, which is a challenge in GPS-denied environments, such as most indoor locations, tunnels and urban canyons.
A new approach helps networks of smart devices cooperate to find and communicate their positions in such environments. This “localization of things” could be helpful in applications ranging from autonomous vehicles to asset tracking, from supply-chain monitoring to smart cities and real-time mapping.
Traditional network localization methods estimate a single value for each geospatial variable, such as the distance between two nodes. Therefore, accuracy drops sharply in environments where multipath, a limited view of the sky, and other problems severely degrade GNSS and wireless signals. A paper by researchers at four institutions outlines a system to capture location information even in these challenging environments by fusing positional data of various kinds as well as digital maps.
The new method fuses data from various sensing measurements — such as radio, optical and inertial signals — and analyzes features of each signal — including its power, angle of arrival, and time of flight. It uses machine-learning techniques to weigh this “soft information” — the researchers call it that because their method does not favor any single “hard” number — to create a probability distribution of distances, angles and other metrics.
It also exploits contextual information from digital maps, dynamic models and node profiles to verify what is possible. For example, two nodes could not be 20 meters apart if they are both in an area with a maximum dimension of 10 meters.
To reduce the complexity and size of the data that it must collect to function, the new method identifies the most and least useful aspects of the received waveforms for the purpose at hand on the basis of a “principal component analysis.”
In simulations of challenging scenarios, full of reflections and echoes, the new system’s performance significantly surpassed that of traditional ones and consistently approached the theoretical limit for localization accuracy, while the accuracy of traditional systems dropped dramatically.
Evolution in civil aviation foresees a greater role for GNSS in onboard navigation systems as opposed to traditional terrestrial navigation aids. This will require improvements in managing the threat posed by RF interference.
Fortunately, the availability of more GNSS constellations and two carrier frequencies now enables GNSS equipment used aboard civil aircraft to not only detect and monitor spoofing, but also determine from which direction it is coming.
A recent paper details a procedure to do this. It consists of a detection module that employs an algorithm to identify which signals tracked by the receiver are counterfeit, if any, followed by a direction-finding module that implements an efficient direction-of-arrival (DOA) estimator. The procedure requires three GNSS antennas and the same number of receivers, time-synchronized with a common clock, plus a signal processor that implements the detection and DOA estimation algorithms. The paper presents the design of the chain of algorithms and their preliminary tests in a laboratory setup, with the simulation of several spoofing attacks, assumed realistic in a civil aviation scenario.
Citation: “An Algorithm for Finding the Direction of Arrival of Counterfeit GNSS Signals on a Civil Aircraft” by G. Falco, M. Nicola, E. Falletti and M. Pini, presented on Sept. 20, 2019, at the ION GNSS+ conference in Miami, Florida.
Joint Galileo/GPS Project on the ISS
The European Space Agency (ESA) and NASA conducted a joint Galileo/GPS space receiver experiment aboard the International Space Station (ISS). The objectives of the project were to demonstrate the robustness of a combined Galileo/GPS waveform uploaded to NASA hardware already operating in the challenging space environment — the SCaN (Space Communications and Navigation) software defined radio (SDR) testbed (FPGA) — on-board the ISS.
The activities included the analysis of the Galileo/GPS signal and on-board position/velocity/time (PVT) performance, processing of the Galileo/GPS raw data (code and carrier phase) for precise orbit determination, and validation of the added value of a space-borne dual GNSS receiver compared to a single-system GNSS receiver operating under the same conditions. A recent paper provides a general overview of the experiment (called GARISS) and describes its design, test, validation, and operations. It also presents the various analyses conducted in the context of this project and the results obtained, with a focus on the (Precise) Orbit Determination results.
Citation: “The joint ESA/NASA Galileo/GPS Receiver onboard the ISS – The GARISS Project” by W. Enderle, E. Schönemann, F. Gini, M. Otten, P. Giordano, J. Miller, S. Sands, D. Chelmins, O. Pozzobon, presented on September 20, 2019, at the ION GNSS+ conference in Miami, FL.
Which of several proposed terrestrial PNT technologies is best suited to complement and back up GPS?
Jules McNeff
“Seeking PNT resiliency for critical functions, a layered, multi-source terrestrial RF backup strategy could include eLoran for continental coverage and Locata, or similar system(s), for high-precision, localized service where needed. However, don’t forget feature-aided navigation using optical, radar, lidar, etc., and positioning/timing from ‘validated’ signals of opportunity in data-rich environments.” Jules McNeff
Overlook Systems Technologies
Terry Moore
“No single technology can provide a backup to GNSS to match the ubiquity of satellite-based PNT. However, placing inertial navigation systems at the core of our PNT solution, and focusing on bounding the growth of the positioning errors using whatever other space or terrestrial measurements are available, could provide an alternative paradigm to resilient positioning and navigation.” Terry Moore
University of Nottingham
Members of the EAB
Tony Agresta Nearmap
Miguel Amor Hexagon Positioning Intelligence
Thibault Bonnevie SBG Systems
Alison Brown NAVSYS Corporation
Ismael Colomina GeoNumerics
Clem Driscoll C.J. Driscoll & Associates
John Fischer Orolia
Ellen Hall Spirent Federal Systems
Jules McNeff Overlook Systems Technologies, Inc.
Terry Moore University of Nottingham
Bradford W. Parkinson Stanford Center for Position, Navigation and Time