In July, GPS World aired a webinar on technical and market aspects of mobile computing. The audio portion and slides of that webinar are still available for download at env-gpsworld-integration.kinsta.cloud/webinar. The following is a complete transcription of the speakers’ remarks.
Alan Cameron (GPS World): Every computer a mobile computer — that’s the vision of the future, a future that is rapidly approaching. That’s also the title of an article in this month’s issue of GPS World magazine, in which both of our speakers here with us today were quoted. And some of their comments were so interesting that I wanted to take the opportunity to explore their expertise and perspectives a little bit further, and so I invited them to speak on this webinar.
The introduction to the July article in GPS World states: “Precise location moves with the demand of business. Organizations across business and public sectors, including the military, now expect a high degree and broad range of functionality in the palms of workers’ hands, wherever those workers may go, in any kind of hazardous, chaotic, demanding signal environment. Requirements for location accuracy rise consistently across the board. In the future—in other words, now—developers will be asked to write mobile software applications first, and desktop applications second.”
As I mentioned, both of our speakers were quoted in that article. David Krebs from VDC Research gave an analysis of the mobile enterprise market, and as a subset of that, the location aspect of it. The article then covered some technical aspects of product design for that market, and Cary Kiest from Trimble is an expert on that and will be sharing his perspective. Now for David Krebs, vice president of VDC Research. David?
David Krebs (VDC Research): Thank you for the invitation to participate in today’s session. A very exciting topic and a topic that obviously is very close to the work that we’re doing here at VDC Research.
Before I get into some of the observations and some of the details that we think are relevant with respect to the theme of enterprise mobility and the value and the importance of accurate and real-time location information, just a brief introduction maybe to VDC Research. We are a full-service independently owned research organization located just outside of Boston, in Natick. The business has been around for the last forty years, and I head up one of three practices areas at VDC, and the focus of the work that I’ve been doing for the better part of the last ten years is around the topic of enterprise mobility and government mobility solutions. And most specifically, we are really looking at how commercial and government public sector organizations are leveraging mobile and wireless technologies to support not only their frontline mobile workers, but also as a way to now increasingly engage with and interact with their customers, and ultimately operate their business in a more streamlined fashion. While historically mobility has perhaps been more of a line of business point solution, as Alan had suggested and certainly as research evidences, there really is no end to its impact in today’s organization. It’s really influencing just about every possible facet. So it’s a really interesting time, a really exciting time to be in this space.
So what is enterprise mobility? And I’m using the term enterprise somewhat loosely here: really, what we’re referring to is the use of mobile within any sort of commercial or government organization. But ultimately what it’s about—it’s, in our sort of rawest definition, it’s about leveraging smart and connected mobile devices to enable, to support real-time decision making, real-time transaction processing amongst remote mobile workers. And this really has or can be interpreted in any number of ways. It can mean, you know, operating your delivery functions more expeditiously; it can mean ensuring that first responders that are on the scene have access to situational awareness so that they can go about their jobs in the most efficient and safe manner. It can mean that construction workers that are surveying a site have access to all the necessary information to make those critical decisions and be able to track those decisions. So it really is, it’s a pretty multifaceted discipline in terms of the organization today.
And the way that organizations are operating today is certainly taking advantage of this evolution, this revolution, this redefinition in terms of the way that we’re working, the way that we’re collaborating, the way that we’re interfacing. When we’re looking at sort of base developments around today’s workforce, I mean, one of the statistics and one of the things that we track is, you know, what is the makeup of today’s workforce? And today’s workforce is inherently increasingly mobile. Based on our research, we estimate that about a third of today’s workforce is what we would describe or classify as a mobile worker—in other words, spending the majority of their time away from sort of a fixed or physical location. And to be able to do that and to be able to still be productive and be efficient—be untethered, if you will—they need access to information. They need to be able to make decisions in this increasingly distributed fashion and in a real-time sense.
The advances that we’ve seen in mobile technology, especially over the last three to four years, the advances that we’ve seen in wireless infrastructure, the advances that we’ve seen in performance of mobile devices from a processing and battery life capability, and just basic cost of adoption trends, is just making this technology increasingly available to organizations. And to one of Alan’s opening points, you know, when we’re looking at applications, when we’re looking at how are we designing enterprise systems, more often than not, the question of the need to expose, the need to access critical information through a mobile device, using a mobile device, is high up on that decision list as we’re making critical IT investments. So exposing enterprise databases, exposing enterprise information, asset information on mobile devices, customer information on mobile devices, is something that organizations are spending a lot of time thinking about and a lot of time investing in.
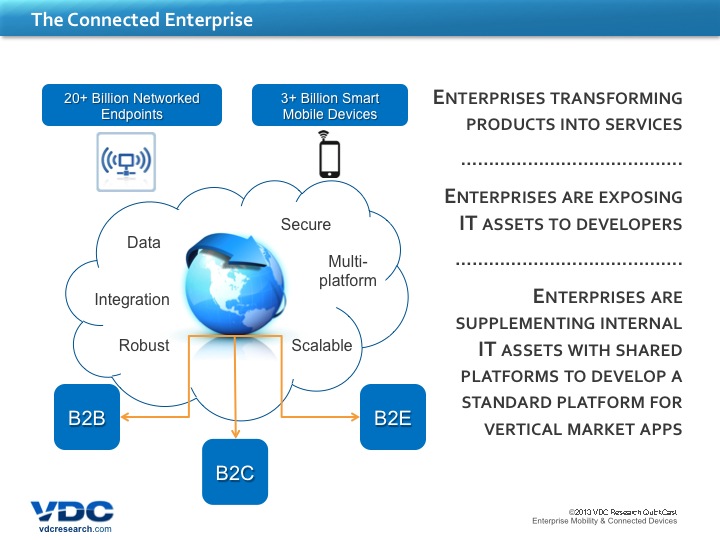
And it really is quite interesting in terms of the transformational nature from the way that organizations are operating. It’s not just about—and we’ll talk a little bit about this in a couple of slides—it’s not just about looking at creating a more efficient and more productive workforce. It increasingly also is about how are we using mobility to engage with customers. So the whole aspect of the B to C or B to B to C channel—how are we delivering services to our employees in terms of mobile HR capabilities is also again a function of mobility that is increasingly being introduced. And within organizations, it’s also transformational from the standpoint of our ability or an organization’s ability to create and to open up value-added services that can be hooked into or connected to certainly advances in mobile and connected endpoints. So enterprises are looking to transport products into services if you will, are looking to overlay service capabilities in terms of leveraging mobile, leveraging sensor technology, leveraging location technology to deliver a much richer and a much more real-time experience. And location has a lot to do with this; location is one of the sort of the critical data points, the critical sensor points that add a lot of value and a lot of actionability to the data that is being accessed, that is being driven. So location is certainly critical, is increasingly critical, as one of the elements that organizations are looking to integrate within their mobile solutions.
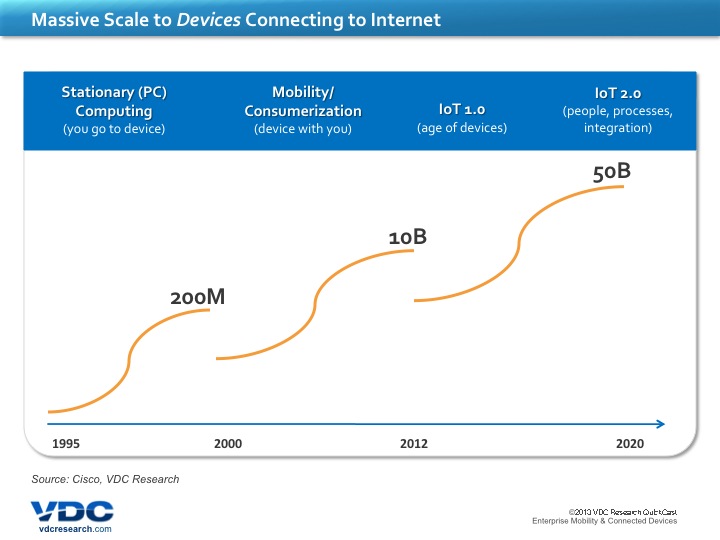
But again, one of the trends that is important to, I guess, follow or at least play off here is the scale at which devices are connecting to the Internet, and use that as maybe a backdrop, use that maybe as a way through which to interpret and to understand sort of the massive power of mobility. And, you know, traditionally, dating back to the mid-90s, it was a very PC-centric sort of value proposition. It was a very stationary value proposition. You as the individual had to physically go to the PC, to the stationary device, to access information on the Internet, to get to the Internet-abled solution. And that scaled to about two hundred million-plus units. What we’re in the midst of right now is really the next wave, and really, I wouldn’t say the tail end, but certainly we’re well into it.
Where we’re seeing mobility and certainly the whole impact and the trend of consumerization being certainly important here, whereby we’re achieving a much higher degree of personalization. And it’s really about something that you take with you and that provides access in a very mobile way, in a very distributed way, and the services that are being enabled through that. And as we evolve that, as we get to sort of the idea of, sort of the age of connective devices, where we’re getting information about remote assets that we can now manage more predictively, where we can get sort of real-time intelligence on the way that, you know, our products and our services are being consumed. And it really introduces some really valuable, you know, propositions in terms of the use of time and the impact of time, because that’s the one resource that we ultimately cannot duplicate. And how do we at best manage this very important resource? And I think that this is really fundamentally where we’re seeing a lot of this change happen.
But going to sort of the trends with regards to mobility and sort of consumerization, there are a couple of important points to make here, especially in the context of sort of the core audience when we’re looking at enterprise mobility. So consumerization has, I guess, a lot of many different meanings, depending on who you’re talking to, but fundamentally, what’s happened over the last four or five, six years, especially with the advent of much more powerful smartphones and more recently powerful tablets, is that we’ve seen consumer technology really take a more leadership role in terms of dictating what our expectations are in terms of what a mobile device should look and feel like and how we should interact with it. And certainly we’ve seen some really really phenomenal advances in terms of ease of use, in terms of immersive user experiences, in terms of ergonomics, and quite frankly also in terms of adoption cost. With a massive scale of mobile devices that are being consumed, certainly the cost of the individual components have come down substantially. So the access to this technology, this is very powerful technology, and the barriers associated with it have lowered considerably.
Now what does that mean for the enterprise worker? What are trends—or the enterprise decision maker, if you will. What do trends such as BYOD and sort of what we’ve seen now with sort of the plethora or the multitude of different operating system platforms—how do I translate that from an enterprise perspective? One of the things that we always come back to, especially in the work that we’re doing, especially for what I might consider the more mission-critical or business-critical field worker, the requirements will differ significantly from worker type to worker type. And, you know, a lot of times what’s happening with regards to consumer technology is in conflict with sort of the goals and the requirements that an enterprise mobility field solution will look to support. And some of the important things to take into consideration is certainly the environments that we’re operating in, the sensitivity if you will or the level of accuracy of location is concerned—I mean, certainly GPS technology and the integration of it in consumer technologies has advanced considerably, but there are different types of location technologies with varying levels of accuracy and obviously implications in terms of the ability to use them as enterprise tools. And then also, you know, considering things like the environmental impact in terms of the durability of the device, in terms of using the device in sort of direct sunlight, using the device that might be exposed to wet or humid conditions, can it sustain that. So we’re trying to balance those enterprise requirements with these advances in sort of ease of use and advances in sort of ergonomics and trying to sort of meet in the middle. Certainly we do expect sort of more enterprise-oriented solutions to embrace and to integrate the UI and the UX experiences that consumer devices have made so popular, but deliver it in a package that is still fundamentally addressing sort of the critical requirements amongst enterprise users.
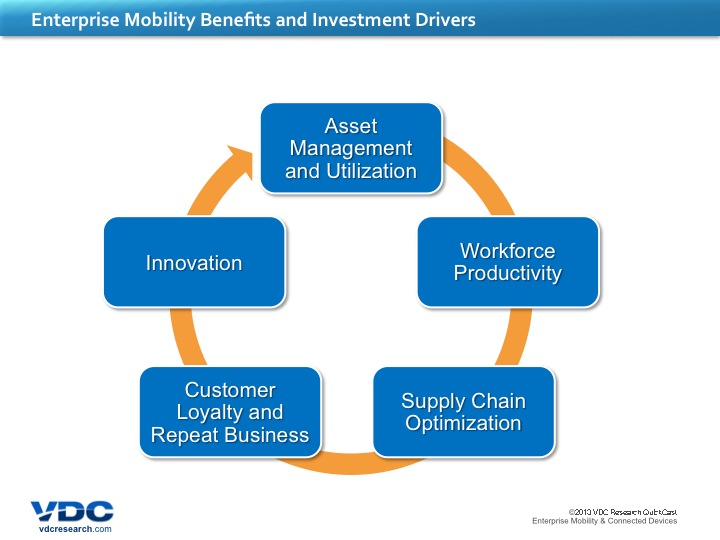
So what is ultimately driving mobility investments? And again, as I mentioned before, the investment drivers have changed, but have traditionally really been around how can I insure that my workforce is optimizing their productivity; how can I insure that they have the critical information they need at their fingertips when they’re out in the field, in terms of service tickets that they might be managing, in terms of assets that they might be supporting. So asset management, utilization, workforce productivity, line of business, things like supply chain optimization, have all been, you know, very important sort of drivers with respect to enterprise mobility investments.
What we have seen more recently is that we’ve certainly seen organizations, certainly forward-thinking organizations optimize against some of these drivers and some of these capabilities, and now we’re starting to see some very interesting, maybe not secondary, but additional benefits come to the fore. And it’s really now about how am I engaging with my customers to deliver better or improved levels of service, to deliver improved loyalty. How am I leveraging what I’m doing with my field workers to potentially even drive innovation in the way that we are delivering services, in its impact in, you know, product design decisions and decisions that might happen more upstream in the organization? So by connecting our entire workforce, by connecting service lifecycle management with product lifecycle management, we have a much more sort of integrated and a much more cohesive story to tell, and fundamentally a much more dynamic and competitive organization and environment.
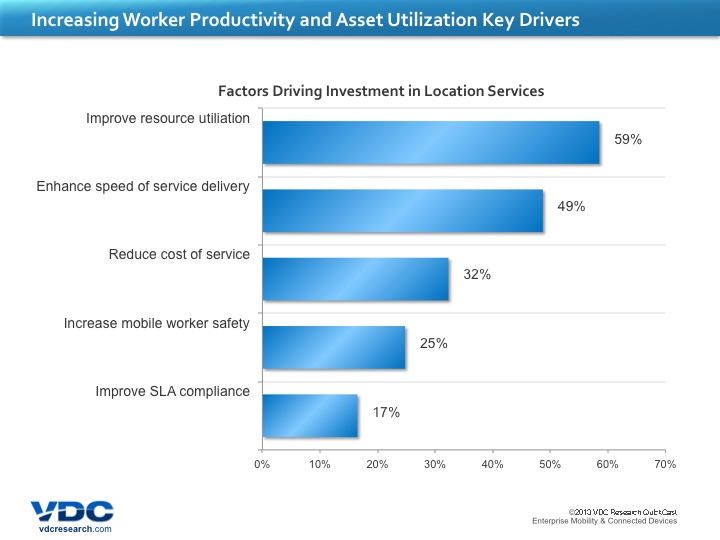
Now, in terms of location within—and again, I understand that I’m speaking somewhat at a high level in terms of talking about field workers, and field workers can be anyone from a utility service technician to a delivery driver to someone responsible for surveying in an agricultural or mining setting, so it’s a pretty broad swath of mobile workers that we’re talking about. But in terms fundamentally of sort of consistent themes that we’re seeing across this base of mobile workers, in terms of the factors that are driving investments in location, in location services, they’re very consistent with overall mobile investment drivers and benefits. And specifically we’re talking about, again, resource utilization; we’re talking about enhancing the speed of service delivery, if it’s a service technician or a service-based workflow, as well as reducing the cost of service, especially today with high cost of fuel and high cost of manpower—we want insure that we’re maximizing it. Compliance and safety are critical requirements that are often overlooked, but especially with a lot of field workers, they are being exposed to environments that, you know, we want insure that they are as safe as they possibly can be. So using mobility and mobile solutions and location technology to increase that worker safety are some really dynamic and really interesting value propositions that we’re seeing. Disaster response—I mean, there are some really important things in terms of not only coordinating response services, but providing access to real-time data and real-time information around weather. You have a mash-up of various information that you’re looking to deliver to these early responders, these first responders, and to also second responders; it’s very important that they’re being delivered with as much location accuracy as possible. Construction and surveying—critical in this context with regards location has-been and that really is sort of fundamental within the processes that they’re supporting. But to be able to do it and deliver it through a mobile device and a mobile solution that is much more ergonomically interesting and much more intuitive is certainly what we’re seeing today.
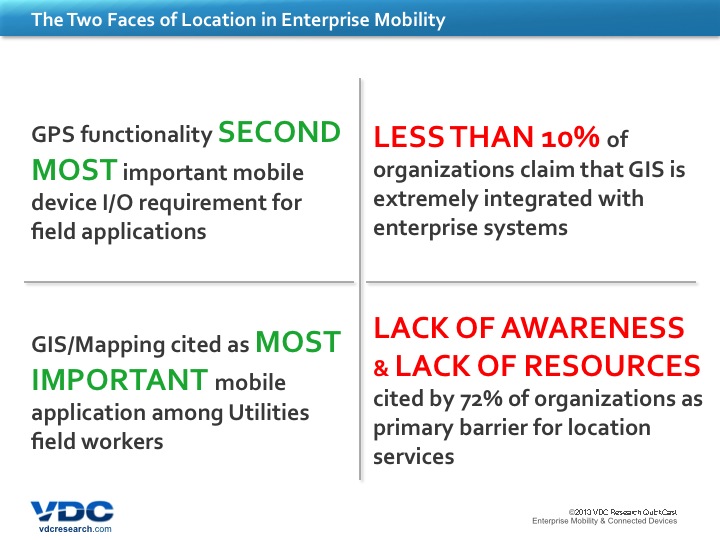
So in looking at sort of the two faces of location within enterprise mobility—because there really is a little bit of a dichotomy here in terms of the importance and the value relative to, you know, what the actual situation is today. You know, what we’re seeing today within, or at least the research that we’ve done within, organizations with considerable field operations, that the penetration of location to track things like service vehicles is about fifty percent of organizations today, whereas fewer than a quarter are tracking resources and assets. So there’s still a relatively low, moderate, I guess, level of penetration from that perspective. However, when you look at it from the standpoint of what is important to you as a decision maker when looking at making mobile investments, GPS functionality location capabilities is the second most important I/O capability for field applications, according to our research. On top of that, you know, GIS and mapping information is cited as—in this context or in this specific scenario amongst utility workers—as the most important mobile application that they’re going to be delivering.
So we have, you know, a scenario where we certainly are exposing and we certainly are seeing a great demand and a need for location and GPS technology. However, on the flip side—and this is really where the other face comes into it—we’re still dealing, perception’s probably the wrong word, but certainly awareness is an apt classification, where the integration of—and in this case, I’m using GIS as the example—the integration of GIS capabilities is still very limited within enterprise systems today. Ten percent or less of GIS organizations today claim that GIS is still very integrated within enterprise systems. And really the fundamental reason behind this, according to respondents, is really it’s about not only awareness, but also lack of resources. Seven in ten organizations cite that this is sort of the primary barrier for the adoption of location services within their operations. They might understand the value, but the resource issue is fundamentally there, and to a certain extent also the awareness issue is a barrier.
So just quickly in summary, I think the points that I was hoping to make and hoping to deliver in this discussion is that as enterprise mobility continues to evolve as a discipline and as organizations continue to invest in mobile and wireless solutions for their frontline workers, for their overall business-critical and mission-critical applications, location is increasingly scaling as an important capability and one that is directly enhancing and supporting many of the field mobile solutions today. However, you know, as I said before, the articulation of the value proposition, more seamless integration of location services within existing enterprise systems—and this is an issue also for enterprise mobility in general, is that integration with backend systems—is something I would say that certainly has fallen behind. So there’s a bit of an awareness issue that needs to be addressed. And then also from a technology standpoint, from a mobile solutions standpoint, we’re certainly seeing some very interesting dynamics in terms of—and I know that Cary’s going to talk about this more in depth in a couple of minutes—but we’re seeing some very interesting dynamics whereby the demands, I guess, if you will, of consumer, or the expectations that have been introduced of consumer technologies are being interpreted into mobile solutions designed for field-based applications where you’re delivering a much more ergonomic and a lighter-weight solution with a more immersive U/I, but still addressing the unique enterprise requirements in terms of environmental conditions, in terms of providing a higher or a more sensitive GPS functionality as opposed to sort of the standard consumer functionality that is available in everyday smartphones today.
So being able to balance that to deliver sort of an optimized enterprise design or enterprise mobile design solution is certainly something that is starting to happen. And really for developers out there, presents a very interesting opportunity, as we’re looking at the demand for the integration of location content, the integration of location intelligence, to drive even greater returns on some of their investments. And so one additional issue or opportunity, rather, as a parting thought before I hand this back over to Alan, is location for the most part today for organizations has been largely an outdoor phenomenon, if you will. And through the advent of GPS—or in other parts of the world, in Russia, GLONASS, their developments that they’ve enabled—but what we’re starting to also see now in certain industries is the opportunity for, demand for, the interest in indoor positioning systems and indoor location solutions, so that also is starting to open up some very interesting value propositions. If you think, for example, of first responders going into buildings and needing schematics and needing to understand sort of real-time locations; if you think of a healthcare facility in terms of locating assets within that facility; in terms of, you know, a warehouse and distribution center, understanding where different workers are in a particular process. So that opportunity is also very interesting and is starting to become certainly more front-and-center.
So with that, I’d like to thank everyone again for attending and I’m going to hand this back over to Alan.
AC: Thank you, David. We’ve taken a look through David’s eyes at the landscape before us, at the horizon, the marketplace, the developments, and now we’re going to step back a little bit upstream to the product design bench and see how industry is moving to meet the demands and anticipate the demands of users and the marketplace. Cary Kiest is a R&D engineering director with Trimble’s mobile computing solutions division. This division of Trimble has recently released an exciting new product for this market and Cary’s going to tell us about some of the challenges and considerations that go into fielding such an innovative product. Cary? Over to you.
Cary Kiest (Trimble): Thank you, Alan, and thank you, everybody, for joining in today. I’m pleased to be here and hopefully we can have a good session. I’m going to go ahead and talk a little bit about the kind of products that we do in the business unit of Trimble I’m involved in. If you have experience with Trimble, you’ll know that for over thirty years, Trimble has been one of the pioneers early on and continue to be a leader of positioning-based solutions, many of them leveraging very heavily GPS technology. And not just GPS technology, but GPS technology integrated with other types of sensing and computing to enable a whole variety of industries that do their work primarily outdoors and in rugged environments, potentially. So things like construction, agriculture, forestry, oil and gas, things like that where you’re outdoors, equipment is expensive, investments are big, and productivity of the individual workers becomes critical and so does their safety.
What our division does here then is we make mobile computing—in general, we call mobile computing devices, but you can think of it as sort of the handheld computers. Tablets, of course, fall into that; things that, handheld computers that are starting to look more and more like smartphones fall into that; but other form factors of handheld that have maybe a bigger keypad for users who are wearing gloves and things like that all fall into the product lines we develop here.
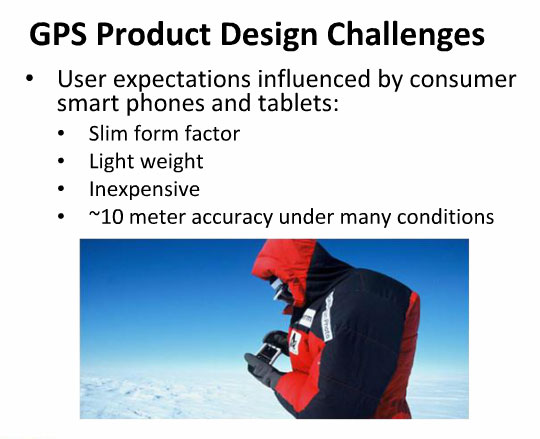
I’m going to talk a little bit about some of the design challenges we face when we’re designing our products, and as David mentioned earlier, one of the primary things that has been driving us more recently is the user expectations that have been influenced by the rapid adoption over the last few years of consumer-based smartphones and tablets. This has been both good and bad for us. On the good—well, I should say challenging, not necessarily bad—but on the good side, because there’s been so much proliferation of, say, smartphones in particular that were position-enabled with GPS, it has opened the door to literally millions of developers who have written very creative applications and have combined positioning technology with other sorts of software, mixing with other sensing devices, coming up with creative solutions that really have flourished and provided a whole bunch of good ideas that I don’t think would have come out of just the enterprise space if it hadn’t been for just opening the door to so many people to start developing against these sorts of hardware platforms.
So that’s been very good; it has influenced in a way where we’ve been able to leverage some of the good ideas, and also we don’t have to do as much work to train our customers because they already have quite a bit of experience now with mobile devices that they’re already comfortable using and so that makes our lives easier. Where it makes our lives a little more challenging is that users have come to expect that they can get a mobile GPS-enabled device that’s very slim, that’s very lightweight, and that’s very inexpensive.
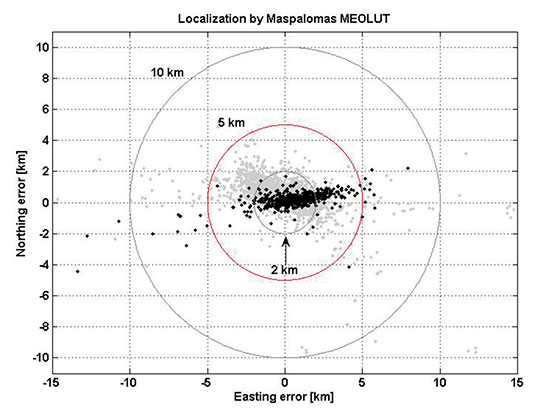
That’s absolutely true when you’re dealing with things like smartphones and tablets. However, the accuracy on those devices today is limited usually to around ten meters under many conditions, and what I mean by that is when you go outdoors, a whole bunch of environmental conditions are going to affect the accuracy of your GPS. For example, even whether the sky is sunny or cloudy will have an influence. Clouds are made of water, water absorbs the radio frequencies that come from the GPS satellite, and so when it’s overcast the signal levels drop. And because the GPS satellite constellation is already a very weak set of signals by the time they reach the surface of the earth, any reduction in that signal level will affect the accuracy. And so when you go out on a cloudy day, you’re going to have less accuracy; when you’re under, say, a canopy of trees, if you’re working in forestry, there’s a lot of water in those leaves and fir needles and whatnot—they will also absorb the radio frequencies. If you’re near tall buildings or other structures, on a construction site where there’s metal girders going up, or freight trains or ships or any large metal objects, those are going to reflect and send other reflective GPS signals to your device, and that’s what’s called multipath, and it ends up decreasing the accuracy of what you can read.
And so there are a whole variety of outdoor conditions that are going to start reducing the accuracy that you might otherwise get when you’re in open sky. And it’s when you get into those sorts of environments, which are very common for outdoor mobile workers, that’s where the expectation that you can get the accuracy on a really slim device is most challenging. And so we have been influenced by that, absolutely, and are designing against that.
There are some things that we can do, though. We want to try and improve our GPS accuracy and keep things slim as much as we can, but the things that most influence the ability to do that is your antenna, and primarily it’s the size of the antenna. To keep a device slim is definitely a motivation, but there is no way around the physics that having a larger antenna that can receive more signals from the satellites is your best strategy for improving GPS reception. Another major factor is the orientation of the antenna. Most antennas that receive GPS signals, the ones that work the best have sort of a flat shape to them, and the flat side of that, to get your best signal reception, needs to be pointing generally straight up.
Now if you can imagine having a smartphone or a tablet that’s a very thin device, usually the flattest surface of that device is pointed at your face so you can see it, and unless you’re looking straight down or straight up at the device, it’s not going to have that flat surface pointing up to where the satellite constellation is positioned. And so that ends up becoming a challenge, too. What you’ve probably seen if you’ve used industrial GPS devices in the past are, you know, larger antennas that are disk-shaped that you want to mount in a way that the disk is pointing straight up. And that’s for a very good reason, and it is so you can see as many satellites as possible with the most signal that you can get from those.

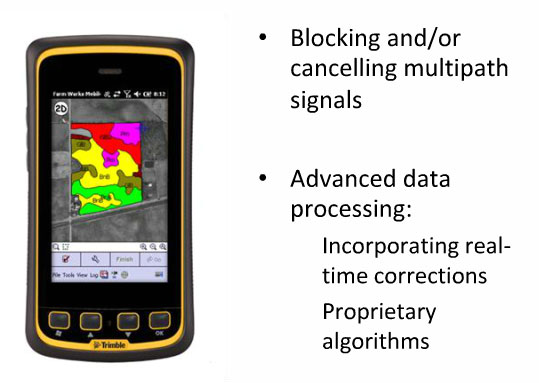
The next thing you want to try and do is block or cancel the multipath signals that I talked about earlier. Specifically, multipath, again, are the signals that don’t come directly from the satellites, but that are reflecting off of other objects in your surrounding area, be it the sides of buildings or metal structures, or even the ground in some cases, which can come back up and interfere with the native GPS signals that are coming straight at you. And so you can block those by adding shields or ground plains—usually directly below your GPS antenna is where you want to do that.
However, again, if you can imagine the example I mentioned earlier, where the GPS antenna wants to be sort of a flat structure pointing up, you’re going to want that shield to be oriented about the same way as the GPS antenna—flat and pointing up—and in fact you want that shield to be even a little larger than the antenna. So there’s another challenge that we face when trying to give a better antenna solution against the expectations of consumer electronics.
One of the last areas is advanced data processing. Aside from getting, you know, optimal signals and blocking multipath and things like that, there’s quite a bit of work you can do once you do get the signals from the GPS satellites in to try and really selectively choose the best signals and filter out or ignore what you think might be multipath, what you think might be noise, and that research is going on continually, and quite a bit of that has actually worked its way into consumer devices, so that they can improve their accuracy with very small antennas, with very lightweight components. So that’s always an area that we’re working on as well. An additional challenge with that, however, though, is the amount of battery power you consume, especially when you’re in a mobile device. You only have so much charge in your battery and you’re trying to make that last as long as possible, you need to be careful how much computing power you spend on what seems like a background task of just receiving GPS signals and recording their position. If you spend too much power doing a lot of number crunching on that, you’ll drain your battery faster.
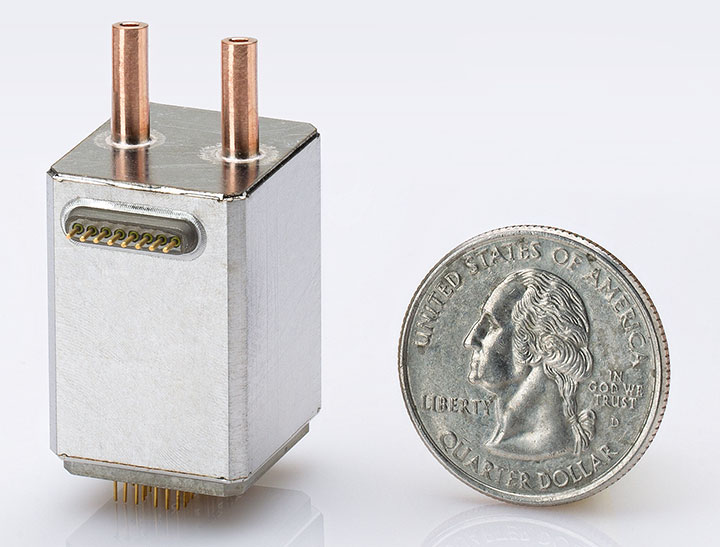
And so what we’ve tried to do is somehow take those challenges that the consumer expectations have put on our market, and design solutions that optimally put us in a good solution to balance the two halves of this: the challenges versus the expectations. And the product that we’ve just announced now is, or actually yesterday it just came out, is an improved GPS accuracy version of our Juno T41 product. The picture you see on the slide right now is a user holding that, and if you look, what you’ll see is a device that looks like a smartphone, but it has sort of an extended black cap or snout coming out the top of it. And what you see there is, that black snout is where the GPS antenna and ground plain are installed. It doesn’t really show up in the photos so well, but that snout is at a slight bit of an angle tipped forward, and the idea there is that we’ve studied the angle at which users are most likely to hold the device, okay, and figured out, well, it’s probably not going to point straight up at the sky, so can we find a nice compromise where we can point the antennas straight up towards the satellites that doesn’t make the device too awkward?
So again, it’s a balancing act between keeping the device slim, keeping it light, but also positioning the antenna such that it has a good view of the satellites overhead. So that’s the form factor we’ve come up with, and that’s one solution you can do. This next slide that you’ll be seeing here in a second is another view of the same device, and so one of the things that we’ve done, of course, is just put in a larger antenna and position it correctly, and so what that does is that gives us that antenna gain, that gives us the ability to pull in more satellites and have stronger signals from each of those satellites. Having stronger signals allows us then to effectively gain accuracy in the more challenging conditions—not just an open sky on a sunny day, but under clouds, under tree cover, in multipath environments, you know, in an urban area where there’s big equipment, things like that. That’s where you really start to see the accuracy difference pay off when you go to a more advanced GPS system like this. You often see, for example, in a consumer device that can get you within seven, eight, nine meters of position accuracy pretty repeatably out in an open area under sunny sky, you walk near a building and that will immediately jump out to like twenty or thirty meters.
For mobile workers, that’s almost no information at all, if you’re trying to, for example, figure out which power meter you’re looking at, or if you’re trying to understand which other physical asset you’re close to when there might be several of those assets in an array along the side of the building. So those are the sorts of applications where that accuracy really starts to help. And we’re adding the antenna gain, blocking or cancelling the multipath with shielding, and then optimizing the signal strength from the entire satellite constellation becomes an issue. I should also mention that when you do get up close to a building, you’re not going to see the GPS satellites through that building most likely, and so the satellites that are viewable overhead, the number of them gets cut roughly in half, and so it becomes very important to have as much signal as you can still get from the satellites that are still in view. You will have some degradation of your position accuracy when you get up close to a building; the goal with a product like what we’ve done is to try and minimize that degradation and still give you as much position accuracy as we can under those situations.
One of the next challenges is, of course, maintaining light weight, and because users have become used to putting the device in their pocket or if they’re carrying it around all day, just the weight of the device will cause fatigue after a while. That becomes a challenge for us when we have to put larger antennas and ground plains in. It’s also a challenge for us when we have to put enough battery power in to have the device last all day. One of the design challenges for making mobile computers is you’re putting it in the hands of someone who could very well be putting in a full eight- or ten- or even twelve-hour shift, where they’re not just looking at the device once every, you know, few minutes to see if they’ve gotten a new text message—they’re using it the whole time, which means that the cellular radial may be sending data back and forth all the time, they’ve got the display backlight on all the time, they may be connected to another device via Bluetooth all the time, they may be using GPS all the time. And so the usage is usually a lot more demanding than a consumer device. And really the only strategies you have to hedge against that are to put in more battery power and then spend a lot more time in your software development to be as efficient with that power as you can—only keeping things on when you absolutely need them and turning them off when you don’t.
And then the other thing that’s going to add to weight is just ruggedizing the device. We build our devices to not just function outdoors and have good GPS accuracy, but also to be rugged, so if I drop it, for example, I can’t have it break. I’m out there—usually the data I’m collecting is worth more than the device itself, and so I’ve got to protect that data, I’ve got to be able to continue my day on the job site. If I’ve driven several miles and I’m four hours into my job and I drop the device or something happens to it, it drops into a puddle of water, I can’t have that end my work day. I’ve got to be able to pick the thing up and dry it off, dust it off, and continue working. Or I’ve just cost my company certainly the wages that I would’ve expected to earn that day, but also it may be that that data is necessary on that day because you have large equipment scheduled to come in the following day that you had to schedule days in advance and it’s costing thousands of dollars. So the economics of it all become very important, and so having these devices be rugged and reliable is a big motivating factor for us. The way to do that most often is to add mass to it: you put more bumpers on it, you have stiffer frames, you have more plastic, all of that adds weight so the device ends up being heavier. And then the heavier the device is, the stronger you have to make it, and you sort of get into a spiral there, where to make it stronger you add more weight, but you’ve added more weight so it has to be stronger, and so make it stronger you have to add a little more weight, and then so on and so forth, until finally you have a device that’s rugged enough to meet the challenges that it’s going to face. So we spend a lot of time trying to do all of these things: put the right antennas in, put the right ground plains in, work on the power consumption, have enough battery in there, and make the device rugged. These are all major portions of what goes on in our minds when we design these products.
Okay, the next challenge has been to try and make the device inexpensive, and part of the issue we have there is that we are using higher performance components than they usually put in consumer-grade devices. Those components cost more because they’re higher performance. Another challenge we have is we don’t typically have the buying leverage that, say, one of the large smartphone manufacturers are going to have. If they’re planning to build several million devices in six months, they’re going to have a lot more buying power to get their components than people who are in a more niche environment like ourselves who are looking at buying, say, tens of thousands. So we don’t have the buying power; we’re going to have to end up paying more for our components that way.
The other thing that we have is we usually sell our products direct to an end user who, or integrator, value-added reseller, who are going to bundle it with software and other services that then go to the, out to the field. And once they go out to the field, it’s the user’s choice as to which carrier they want to add to it, so they’ll buy a separate data plan. When you go buy a smartphone, you may very easily think, well, this thing only cost ninety-nine or a hundred dollars—well, that’s not really true. It actually cost several hundred dollars, but they’ve buried a lot of that cost into a service plan that’s going to last, say, two years. So we don’t have the ability to hide our costs in service plans like that. And that just influences user expectations about what a device like this should cost. So, you know, like all businesses, we have pressures to keep the costs low, and these are some of the ones that we struggle with the most to try and overcome.
So, having said all that, what does a company like us, or a group like ours, have to do to put all this together and get it right? Well, first of all, you have to have a very deep knowledge of GPS systems and their use cases. There’s a lot more to GPS technology than just receiving the satellites, crunching the numbers, and reporting a position. There’s all sorts of augmentations and correction services that can be added to help improve your accuracy in situations where you may not have a clear view of the sky or good signals. You have to know the use cases really very well, and I talked a little bit about this before when I mentioned the differences between, say, using your device in an open sky environment or near large objects that are going to cause multipath or under tree cover or all of the above—how important is that?
Well, knowing your customer, knowing the workflows, knowing the kinds of situations they’re going to be in—are they going to be standing still, are they going to be on the move, how long do they want to spend at any one point if they’re moving around—all of those sorts of things and being very good at understanding what’s going on with your customers is something you have to have. So we’ve made that our business for many many years now, and we have all that. Extensive design modeling and testing: it’s not easy to design these devices. You can get away with just buying an antenna, buying a GPS module, putting it in something, turning it on, and seeing how it works, but you’re not going to wring all of the performance out of it and avoid all the problems unless you have pretty sophisticated tools to do all this. So you have to make an investment, and of course we’ve done that; again, you know, Trimble has been pioneering GPS for over thirty years now, so we have a lot of real powerful design assets throughout the corporation that we tap into. You have to select and integrate the right components. This is really important: you have to know where the problems are and where some of the component providers may have a weak spot in their product line-up, and they’re not going to advertise those.
So through experience and through a lot of testing and proof of principle work, you’ll learn that over time. And so we do spend a lot of our research budgets doing all that, working with the suppliers of the components we use to get the best out of what they have available. And then the next one is optimally balancing all the trade-offs presented earlier. I’ve tried to paint a picture here to describe a lot of the challenges, and there are many, and at the end of the day what you end up doing is deciding how to make compromises, like all real good engineering problems. Do I spend more and get maybe a few more inches accuracy, or do I spend a little less—you know, where do we set the knobs on that? And so there, again, understanding how the systems work and what your customers really need and then choosing where to settle those knobs and balance the trade-offs is an important part of getting the right product out there.
That’s really going to help people and hit the market in an area it wants. And then staying on the leading edge of GPS technology improvements. You know, we’re not done. There are neat new things coming out, on the horizon, on our roadmaps, that we need to be aware of or we stand the terrible chance of falling behind in a game that we were one of the early leaders in and remain a leading player even today. And so keeping our eyes out on what other people are doing, pressing forward with our own research in these areas, and being innovative is a key part to staying in this business and providing value.
And with that, I think I’m done with my presentation, so I will hand it back to Alan now. And I’ll want to thank you all again for your time and listening in today.
AC: Thanks very much, Cary. We have a few minutes left and we have some questions from the audience. I’m going to jump right into the first one. One of our listeners wants to know—and I’ve modified his question a little bit: going further into the future than what you have talked about so far, what advances in mobile location technology can we anticipate a) in the current financial year, b) in the next two or three years? I think this listener is trying to gauge the market, gauge the advent, the rate of advent of technology, and determine the sweet spot for a purchase. Do it now, or wait for a little bit more capability and do it later? And of course when you’re talking about an enterprise equipping a whole crew or a vast number of workers, that can be a significant investment and an important question to know when to time your purchase. I’d like to open that to either of you gentlemen: what advances beyond what’s currently envisioned, both in technology and applications, can we expect in the next year, and then in the next two to three years?
CK: I can go ahead and take this one—this is Cary Kiest again. Speaking from my own perspective here at Trimble and then also from the perspective of keeping an eye on what we see, what I think you’re going to see in the near term here are slight improvements to products that are already out there and a little bit more product differentiation. For example, the product I talked about earlier that we just announced sort of splits the difference between the very accurate GPS devices that get down into the centimeter range and the ones that are more into, like, the five- to ten-meter range. We’ve got one that’s in the one- to two-meter range, and so that’s really more of a packaging thing where we’re trying to give something that is in sort of a middle ground between two areas that previously existed. You will see from us later this year something similar in a tablet space. And so that’s an area where it’s either market differentiation or a slight improvement to what’s already out there.
As we look a little further down the road, what you’ll see is improvements in cost and the performance you get for the cost. You’ll also, I think, see—and this is something David talked about a little bit earlier—there’s a lot of interest industry-wide in indoor positioning, and specifically what that refers to is how do I know where I’m at when I don’t really have good access to GPS signals? And so there’s a lot of research and some early products coming out that will allow you to know where you are as you transition from outdoors where you have GPS to indoors—and it may not just be indoors, it may be on a construction site where now, you know, you’ve started to put up enough steel girders and whatnot and the building is taking shape. How can I know where I’m at on that site where I don’t have good GPS signals, and how can I improve the accuracy? Can I know where I’m at down to within, say, a meter, or even a couple feet or a few inches? So you’re going to see things like that come out; I think you’re also going to see mobile computing be defined into the wearable space also. For enterprise things, you know, you’ve probably been hearing a lot of buzz about Apple’s iWatch that they’re talking about—you’ll see this sort of thing come out in the enterprise space too, but that’s further down the road. It might be a simple thing that workers wear that knows their position and maybe monitors a few conditions as they go into a hazardous location or they’re on a job site where it’s important to know where everyone’s at. And so I think those are sort of the main areas of investment you’ll see come out from our industry over the next three to five years.
AC: David, anything to add to that?
DK: Yeah, I mean, I would certainly concur with what Cary said. I think what we’re in right now over the next couple years is a period of refinement. I don’t think certainly in the near term even you’re going to necessarily see technologies coming out that are, you know, significantly different in terms of their capabilities, but we’re going to see a refinement in terms of a better alignment with solutions with particular applications. So fundamentally from the end user, from the individual with this question, it really comes back down to what are they looking to do? What’s the application they’re looking to support? And that will ultimately determine sort of the viability of today’s technology. There isn’t anything—I mean, what we see with a lot of customers, especially because of the fast-paced nature of mobility and the seemingly endless change, is timing the perfect entry point. And one thing that we won’t stop in this industry is innovation and change. So in terms of waiting for that perfect solution, so to speak, I mean, you can spend a lot of time waiting for that because there’s always going to be refinement and improvement to it. So I think a lot of times what we recommend our customers is, yeah, you might not want to take the big bite right now—we understand that, we want prudent investments—but a lot of times when asked what they would do differently, when we ask a lot of investors, is we would have started sooner.
So I think in terms of the maturity, the accessibility, the availability of technologies that can address most applications, you know, that’s on the market today. So I say—again, not knowing the application, there’s no real reason quote-unquote to wait. But certainly advances around indoor positioning systems, I mean, that’s really where we’re seeing probably, over the next two to three years, probably the greatest change happening. Certainly advances in mobile form factors, and quite frankly, yes, cost of technology, cost of services will come down. And I think also the integration of, you know, some of this content from an application development design perspective will become a little bit more seamless.
AC: All right, thanks. We’re at the hour straight up, but I’m going to squeeze a last few couple of minutes of value out of this webinar for our listeners by asking one more question, and we’ll treat this fairly quickly if we can. There’s a lot that can be said about it, for sure, and our July article did treat this subject somewhat. One of our listeners wants to know, in your opinion, what is the best development platform for application development? Do you think one should model the app and then write separate code streams for Windows, Android, iOS, and so on, or—the question always boils down to who is going to win the platform battle? And is there room for more than one? Either of you gentlemen care to comment on that?
CK: I can go ahead and start on that one again. This is Cary Kiest. We—here at our group, most of our customers are writing something a little more advanced than, say, a user app that you might download from the Play Store or something like that. And so we have run into from time to time users who try to use a cross-platform development tool to port their app that they’ve written, say, for iOS over to Android or Windows Imbedded, and they usually run into a problem when they get down a couple layers closer to the hardware. And specifically, when you get into devices like ours or computers like ours where we’ve used more advanced, say, GPS systems that have more parameters and more capabilities, you have to really understand how to integrate with those and tap into those capabilities in a way that a cross-platform development system isn’t probably set up to handle. So we usually recommend people to not try and do that for applications that run on our devices that are very user-specific and pointed at the enterprise. To get the kind of performance you need with the technology out there today, we definitely recommend going and developing in the environment that’s suited for that particular operating system.
DK: Yeah, I mean, I won’t add much to that, Alan, except there—you know, this is one of these sort of the conflicts of, you know, the consumerization as we’re seeing this multitude of platforms. And certainly when you’re looking at the base numbers, you know, iOS and Android are outpacing any other platform by leaps and bounds. But that tells only part of the story, if you will. We’re certainly seeing the potential for, you know, OS change also on sort of these more enterprise-specific devices and I think there is room for alternative platforms. But fundamentally, getting down to the question, is what’s the appropriate development approach today for these, what I would consider more business-critical, mission-critical, field applications—today still, I would say that for a number of reasons, native development will still trump cross-platform development, even though we’re seeing some interesting advances, and certainly the HTML-5 spec and its ability to address, you know, offline capability and sort of dynamic caching and thinking capabilities or incremental thinking capabilities. So I think the improvements are occurring, but in terms of user experience, in terms of offline support, and to Cary’s point, in terms of true access of device–site capabilities, for these types of applications today, native development is, I would still say, sort of the best approach.
AC: Thank you, and with that we’ll wind up the content section of our program. Thanks to both you gentlemen, Cary and David, for your insights; thanks to the audience for joining us—the content must have been compelling because I estimate about ninety, above ninety percent of you stayed tuned in for the entire webinar, including running five minutes over. Thanks for your indulgence. Thanks also to our sponsor, Hemisphere GPS.