EGNOS Toolkits Enhance GPS Accuracy
Free downloadable software Toolkits at www.egnos-portal.eu can help cell-phone and handheld receiver developers enhance location and timing applications with GPS corrrection data from the European Geostationary Navigation Overlay Service (EGNOS) satellite-based augmentation system.
The Toolkits include software packages, demo applications, and supporting materials, enabling application developers, researchers, university students, and others to create, use, and maintain EGNOS-capable positioning applications.
For handheld receiver manufacturers and mobile-phone developers, the Toolkit contains free source code for easy integration of EGNOS capabilities into a smartphone, and all the necessary files for the demonstration application, for use as a basis for a new application, as well as core libraries, to integrate enhanced EGNOS positioning capability into an existing application.
For the simply curious, an EGNOS Toolkit provides a means of exploring and understanding the entire chain from the raw GNSS satellite signal to enhanced EGNOS positioning data.
The development kit provides an easy way incorporate all EGNOS corrections and integrity capabilities, allowing developers to perform real EGNOS integration directly into a smartphone. It works with different operating systems, including Android, Apple, and RIM.
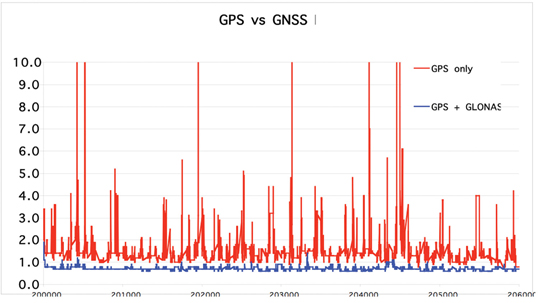
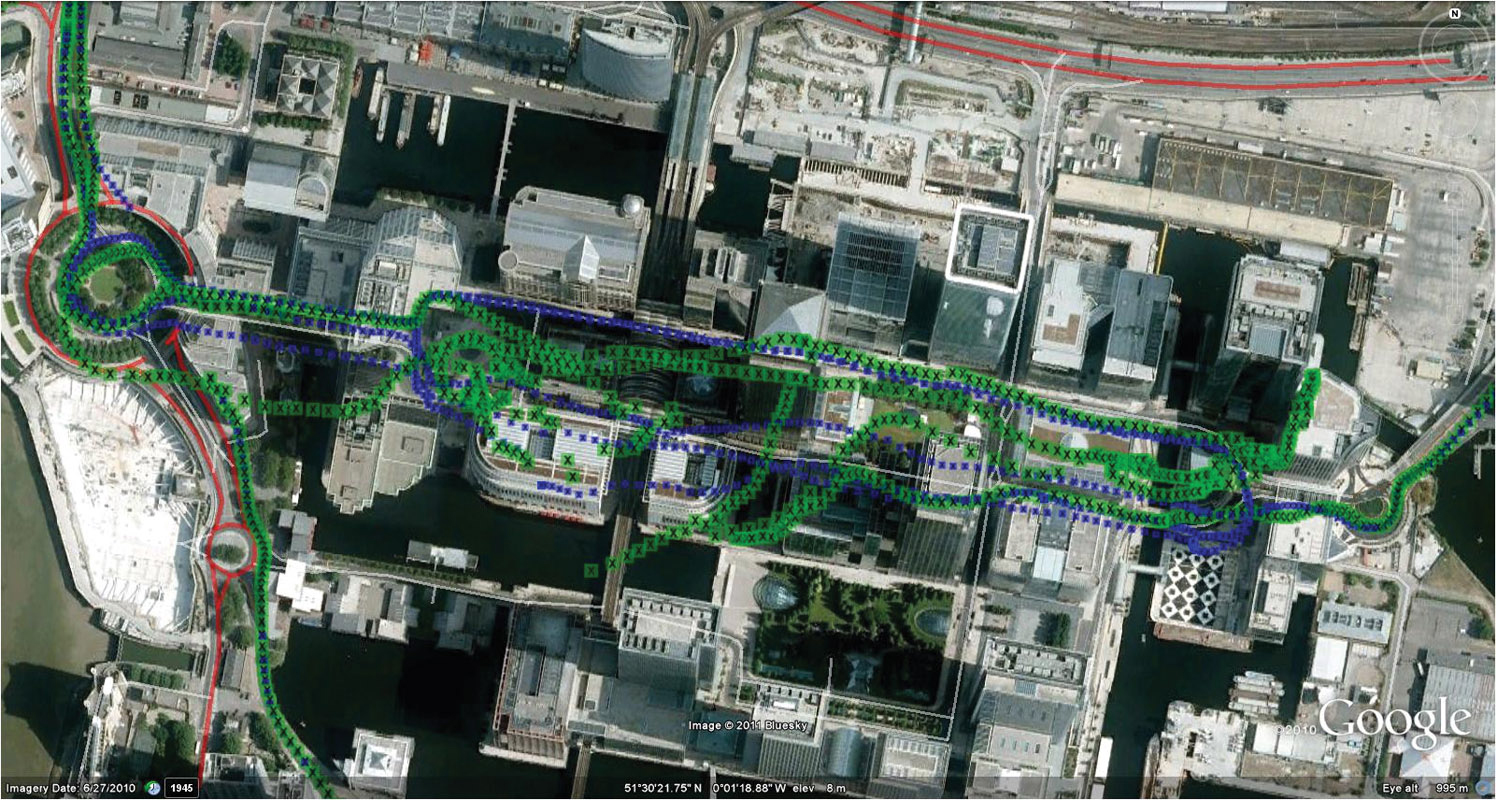
Static and kinematic tests show that EGNOS performs well in both cases: “The EGNOS SDK provides an average increase of 30 percent in position accuracy over GPS alone,“ according to developer DKE Aerospace.

EGNOS Software Development Kit provides a software receiver to enhance GPS positions, displaying position accuracy increases on average of 30 percent.
DOT Blank Stare on LightSquared
The U.S. Department of Transportation (DoT) responded to a Freedom of Information Act (FOIA) request by GPS World for its recommendations to the National Telecommunications and Information Administration (NTIA) regarding LightSquared interference with GPS. The DoT wrote, “We are withholding two pages [of thirteen relevant pages] in part and eleven pages in their entirety,” and enclosed two completely blacked-out pages.
Kathy Ray, DoT FOIA officer, added, “We have determined that the release of the redacted and withheld portions would foreseeably cause harm to the government’s deliberative process.”
The blacked-out DOT letter is dated August 25, 2011. How it differs from the agency’s July 21 “LightSquared Impact Assessment,” publicly available courtesy of the U.S. House of Representatives Committee on Science, Space, and Technology, cannot, of course, be known.
The Department of Homeland Security wrote in response to GPS World’s FOIA request, “We conducted a comprehensive search of files with the Science and Technology Directorate’s Homeland Security Enterprise and First Responders Group, and Cyber Security Division for records that would be responsive to your request. Unfortunately, we were unable to locate or identify any responsive records.”
The National Institute of Standards and Technology of the Department of Commerce replied, “NIST has no documents that are responsive to your request.”
The Department of the Interior provided the same documents that were previously made public by the House committee.
The National Aeronautics and Space Administration made a similar determination, but did not send a document, referring instead directly to the committee’s public website.
PNT Board Hears Proposal for LightSquared Solution
The November 9 meeting of the National Space-Based Position Navigation and Timing (PNT) Advisory Board in Alexandria, Virginia got several earfulls regarding the LightSquared/GPS controversy. One of seven speakers on a two-hour panel, Javad Ashjaee, president and CEO of JAVAD GNSS, demonstrated his company’s newly developed filter technology that he said could protect GPS receivers from LightSquared broadband network interference.
As Ashjaee stated, the proposed solution does not protect against interference from the so-called high-10 signals, one of two bands (the other is known as the low-10) for which LightSquared has received a conditional waiver. Unless and until a solution for the terrestrial high-10 signals is found, LightSquared transmissions in that band will still interfere with the GPS signal. The technical solution proposed by JAVAD GNSS addressed only the low-10 band.

Proposed filter to “harden” high-precision GPS receivers against Lightsquared Lower 10 (click to enlarge.)
The JAVAD GNSS proposed fix consists, in simplified form, of a ceramic filter followed by a series of surface acoustic wave (SAW) filters.
A PDF of Ashjaee’s 76-slide Powerpoint demonstration, without his verbal explanations and commentary, along with other presentations from the board meeting, are available at www.pnt.gov/advisory/2011/11/. A December 8 GPS World webinar reprised the same presentation, and the download at env-gpsworld-integration.kinsta.cloud/webinar includes audio of Ashjaee’s remarks.
Ashjaee said that his company’s testing of its own filter methodology found no GPS signal loss due to a low-10 (10L) signal power of –10 dBm. An “Ultimate Test: Special Zero Baseline” put receivers on a Moscow skyscraper with multipath from both above and below. One antenna fed two receivers (zero baseline). One receiver used standard filtering and the other the new filters. He said that over 15 hours of testing the average carrier-phase error between the two receivers was 0.2 millimeters, and the average code difference was about 5 centimeters.
JAVAD GNSS has started production of what Ashjaee calls “LightSquared-compatible” Triumph GNSS receivers. He brought 40 units to the PNT Board meeting. The company will begin manufacturing “LightSquared-integrated” receivers in May 2012, for RTK positioning using the proposed LightSquared broadband network for high-speed communication, if and when it is deployed.
Fellow presenter Jim Kirkland, vice president and general counsel for Trimble Navigation, pointed out that such filters represented a potential solution only for one class of high-precision receivers. Whether it would work for other classes of high-precision receivers had yet to be verified. Kirkland said that even if further independent testing shows that the filter solution is viable at the lower 10 MHz of the spectrum, retrofits would be costly and time consuming.
Questions regarding cost and responsibility of retrofit, should the solution prove practical, were not discussed at length at the meeting, nor was any solution proposed.
LightSquared executive vice president Martin Harriman did not directly answer a question as to whether his company intends to develop the upper 10 MHz for which it has been given a conditional waiver.
Scott Burgett, software engineering manager for Garmin International, said, “It is almost impossible to design new products compatible with LightSquared’s proposed system without knowing its technology’s end state.” He estimated 10–15 years to properly retrofit Garmin devices, which are widely distributed in general aviation, personal navigation, car navigation, and other sectors, so that they could coexist with LightSquared.
The panel was moderated by Tom Stansell of Stansell Consulting, who concluded, “I think we learned, thanks to Javad, about a very clever solution to a particular problem for a particular range of products — the products he is most familiar with. It may or may not fit in some of the other applications.
“What we have not addressed is the elephant in the living room,” Stansell continued. “That is the cost, and time delay, and changeover process if LightSquared is allowed to go forward. Will it be the lower 10, upper 10? That has to be resolved. There are very large questions remaining to be discussed, and [they] may or may not be fully solved in a short period of time.”
Constellation Updates
Where Is Compass ICD?
The long-awaited signal interface control document (ICD) for China’s Beidou/Compass GNSS has not yet appeared, despite an announcement at the ION-GNSS conference by Chinese delegates that ICD document v1.0 will be published in 2011, “probably” in the month of October. When it does appear, it should be available for download on the Compass website, www.beidou.gov.cn (as yet without an English version), also at www.compass.gov.cn.
The delay in publishing a document may reflect a system very much in formulation, with ongoing discussions among the principal parties to its design, with different views on system architecture and possibly even final signal structure. This was one possible conclusion that could be inferred — a dynamic system in formation and growing rapidly — from varying reports given by different Chinese representatives, governent and academic, at the ION Compass session.
There was some disagreement among panelists at that time as to, for example, the final targeted number of satellites in the system: either 30, or 35.
The ICD has been rumored to be available previously to receiver manufacturers within China, creating some disgruntlement among companies outside the country. One of the ION panelists affirmed that GPS/Compass chips and receivers are being actively developed by many Chinese manufacturers and research institutes.
The next BeiDou/Compass launch, which will be for the system’s fifth inclined geosynchronous orbit satellite, is expected during the first few days of December, according to web discussions. As of press time for this magazine, there had been no official announcement on the Chinese official government BeiDou website, www.compass.gov.cn.
The site has posted Chinese and English versions of a document titled “Report on the Development of BeiDou (COMPASS) Navigation Satellite System (V1.0)” by the China Satellite Navigation Office. The pages are viewable as separate images.
Galileo Under Control
Europe’s first two in-orbit validation satellites reached their final operating slotss 23,222 kilometers above Earth, have been activated, and are now undergoing tests of their navigation payloads, reports the European Space Agency (ESA).
Marking the formal end of their Launch and Early Operations Phase, control of the satellites passed on November 3 from the French space agency (CNES) center in Toulouse to the Galileo Control Centre in Oberpfaffenhofen, Germany.
Oberfaffenhofen, operated by the German Aerospace Center (DLR), will be in charge of the satellites’ command and control for the whole of their 12-year operating lives. The navigation signals are being checked out by ESA’s ground station in Redu, Belgium, where a 20-meter antenna measures the shape of the signals to a high degree of accuracy. Once the navigation payload is fully checked out and activated, a second Galileo Control Centre in Fucino, Italy, will oversee all navigation services. All activities are performed under contract to SpaceOpal, a joint subsidiary of DLR and the Italian company Telespazio.
GLONASS as Expected
The Satellite System Mission Control Center of the Russian Ministry of Defence, with the ISS-Reshetnev Information Computation Center, established communication with the three GLONASS satellites launched November 4. The satellites are earth- and sun-oriented, and their subsystems are functioning properly.
According to NORAD tracking, the three satellites were inserted into Plane 1. This was expected as there are only seven active satellites in this plane, whereas the other two planes have a full complement of eight satellites. Orbit slot 3 in Plane 1 is currently vacant. According to Nikolay Testoyedov, ISS-Reshetnev general designer and director general, the new satellites will ensure the operation of a complete 24-satellite GLONASS constellation, and allow creating the necessary orbital reserve.
GPS GEO-MEO Floated
In a presentation titled “Analysis of Alternatives for Future GPS Architecture; Considerations for Constellation Sustainment,” made to the U.S. PNT Advisory Board on November 9, Kirk Lewis, senior advisor from the Institute for Defense Analyses (IDA), put forth the concept of “boosting” GPS III payloads onto commercial geostationary Earth-orbit (GEO) satellites.
After concluding that the current program of launches and orbit costs extending into the Block III-C generation is not sustainable, Lewis presented several alternatives, but quickly eliminated two that involved low-Earth-orbit satellites and non-space options, due to technical, scheduling, and performance issues. Remaining in play are “potential and realistic” GEO and mid-Earth orbit (MEO, the configuration of the present GPS constellation) options, used individually or in combination.
IDA analysis found that two GEO satellites, separated by 15 degrees or more longitude, supplied almost the same signal performance as adding six MEO satellites. The presentation is available at www.pnt.gov/advisory/2011/11/.