Oxford Technical Solutions (OxTS) has rolled out its Inertial+, an inertial navigation system that can be used with an existing GPS receiver to improve position measurements, according to the company.
The Inertial+ includes inertial sensors, processing engine, and algorithms. It is built around a 6-axis inertial measurement unit — including three angular rate sensors (gyros) and three servo-grade accelerometers — to measure position and velocity even when GPS is not available, OxTS said.
Designed for surveying in an urban environment, the Inertial+ is able to ignore or correct jumps in the GPS measurements. In addition to position data when combined with a GPS receiver, the device will also produce measurements like roll, pitch, and heading. Data is read and output in NMEA format, and other formats are supported. By combining an Inertial+ with a high-accuracy real-time kinematic (RTK) GPS receiver, users can achieve 1 centimeter precision, 0.03 degrees roll/pitch accuracy, and low drift rates when GPS is not available, according to the company.
The U.S. Department of Transportation (DOT) has approved a decision to continue the inland component of the Nationwide Differential GPS (NDGPS), based on the results of a user assessment conducted by the Research and Innovative Technology Administration (RITA).
RITA assessed the current user needs and systems requirements for the inland component of NDGPS. It gathered information through public responses to a notice in the Federal Register (including responses from state and local governments, the private sector, and the non-profit sector), and through quantification of the mission requirements of other federal agencies using inland NDGPS, according to DOT.
But this doesn’t mean that funding of inland NDGPS is not still up in the air. Earlier this year, DOT included in its fiscal 2009 federal budget request a $4.6 million line item in the RITA budget for NDGPS operations and maintenance of the current system through October 2009.
Discussions are ongoing regarding the program’s future funding mechanism, and will be addressed in future budget submissions, DOT said. The National Space-Based Positioning, Navigation and Timing Executive Committee endorsed DOT’s decision at its meeting in March.
European timing and frequency technology players Orolia and Rapco Electronics Ltd. have formed a strategic partnership for technology development and distribution.
Specifically, Orolia Group companies Spectracom and SpectraTime will join the existing alliance between Pendulum Instruments — recently acquired by Orolia — and Rapco Electronics to cooperate on several fronts, including global distribution channels, operations, and new product development efforts. U.K.-based Rapco Electronics will represent and distribute Spectracom and Pendulum products in the United Kingdom and Ireland, the companies said. Outside of this region, both Pendulum and Spectracom will distribute key Rapco products under their own respective brands.
In addition to sales, Orolia and Rapco Electronics will combine service and support for the United Kingdom and Ireland in Rapco’s Basingstoke, U.K. headquarters. Serving as a single point of contact, Rapco will provide its and Orolia Group customers a high level of local service and support for standard time and frequency products, unique applications, systems and custom engineered applications, the companies said.
The partnership will also enable Rapco Electronics to enhance its ability to provide custom timing and frequency systems for defense and space customers, given its access to Orolia technology, according to the two partners. Technology sharing and operational efficiencies between them will also enable a higher degree of innovation and lower times to market for their customers, the companies said.
“Orolia and Rapco Electronics complement each other very well, and we are very excited about our new relationship,” said Yves Courtois, Orolia chairman and CEO. “By joining forces, we believe we can boost Orolia’s presence in the United Kingdom and Ireland, and substantially accelerate our worldwide development in defense and space timing and synchronization, a corner stone to large system integration.”
Here are highlights of presentations I attended today.
Improving GPS Accuracy for Urban Pedestrians, presented by Jean-Baptiste Prost of Pole Star
A standing-room-only crowd packed the room to hear about map matching, a software program designed to help pedestrians use GPS-based positioning in urban areas. GPS-based positioning for pedestrians in dense urban areas suffers from a lack of accuracy and integrity. Pole Star’s solution combines GIS database containing geometrical descriptions of buildings with raw data from the receiver, then restricting the area of possible locations by matching GPS measurements with the environment and behavioral models. Tests in several cities shows dramatic improvements to the accuracy of GPS-based positioning for pedestrians, especially in areas with tiny streets. Jean-Baptiste said the product is ready under the name of NAO City.
Real-Time Information on Road Traffic Based on Floating Car Data, by Laurent Brecheret
The SINERGIT project has developed a cooperative information system for road and urban networks. The system aims to optimize traffic management means, and provide real-time info on driving conditions to all drivers who use personal navigation devices. The three data sources used are data from existing traffic monitoring systems, data from telecom operators tracking cell-phone use, and tracking of PNDs and GNSS-enabled smartphones. This final category is called floating car data, and is used to measure average speed of traffic and to estimate overall traffic conditions. A central system merges the three sets of data to create the best traffic information which can then be shared with drivers in real time.
Navigation Applications Supporting the Mobility of Disabled People, by Francesca Neccia of Thales Alenia Space
The Navigation for Disability Applications (NADIA) Project aims to improve safety and security for the disabled, while giving them increased autonomy. Using GPS, EGNOS, and eventually Galileo, a blind or wheelchair-bound individual will have supports unavailable now, with access to sports, leisure pursuits, and education. The project is now in the system engineering phase, and once system tests and validation are completed, a prototype will be demonstrated.
Evening 2: Space Walk
Being a fan of space exploration, the Gala Evening at the Cite de l’Espace was right up my alley. Guests toured the Mir space station, ate “space food” (served in test tubes), and enjoyed an eye-popping 3D Imax movie about the International Space Station.
Day 2: eLoran for Europe
eLoran for Europe: The European eLoran Forum makes a case for European support of eLoran in its new policy document. The document sets out the strategic importance of positioning, navigation, and timing (PNT) systems in Europe, and emphasizes the role of Enhanced Loran as a way of making European PNT foundations robust and resilient. “The development and operation of the European eLoran infrastructure is currently being undertaken on an ad-hoc basis,” according to the executive summary. “The importance of eLoran’s supporting role to GPS and Galileo needs to be assessed within the context of a European Radio Navigation Plan. Using these three PNT systems together will protect our critical infrastructure and allow our European service providers and users to retain the safety, security, and economic benefits of GPS that they currently enjoy even when their satellite services are interrupted.”
Seeking the GRAIL: Hoping to hear the final results of the GRAIL project was met with slight disappointment—May is the new target date. GRAIL is a Galileo Joint Undertaking project to study how best to introduce GNSS to railways throughout Europe, in line with the European Rail Traffic Management System (ERTMS) project. ERTMS is an overall effort to make all European trail systems compatible, because each country has its own rail “language” for managing the movement of the trains on its network. Over the past decade, industrial giants and European governments have strived to attain rail interoperability, so that trains can cross borders without stopping. ERTMS has been set up to create unique signaling standards throughout Europe. Alvaro Urech from INECO described the four applications the GRAIL project is aiming for: enhanced odometry (measuring the speed and position of the trains, and possibly increasing speed); train awakening (trains knowing where each other are positioned); absolute positioning; and train integrity to ensure the trains are whole and not “broken.” So far in the project, specifications for these applications have been agreed on, along with performance requirements. A prototype for demonstrating these applications is being developed for tests in the lab or on a real high-speed line. Train awakening has been tested, but it’s too early to report results.
Time for a New Partnership: In business news, two timing companies have announced a strategic partnership. Orolia, parent company for timing providers Spectracom and Pendulum Instruments, and Rapco Electronics (Basingstoke, Hampshire, UK), a high-precision timing provider, announced today that they’ve formed a partnership. In a multi-phased approach, Orolia Group companies Spectracom and SpectraTime will join the existing alliance between Pendulum Instruments (recently acquired by Orolia) and Rapco Electronics to cooperate on several fronts to leverage global distribution channels, operations, and new product development efforts.
Rapco Electronics will represent and distribute Spectracom and Pendulum products in the UK and Ireland. Together with its own products, Rapco will provide a comprehensive range of high-precision time and frequency products for governmental, military, telecom, broadcasting and scientific customers. Outside of this region, both Pendulum and Spectracom will distribute key Rapco products under their own respective brands.
Day 1: Comic Books and Space Tunes
Toulouse is a beautiful city — pink-hued buildings with red roofs, narrow pedestrian-friendly streets, a sense of history and time. Quite a contrast to high-tech science, the subject of the Toulouse Space Show. Upon registering, I was given a bag heavier than the luggage I left back at the hotel. I’ve been to numerous conferences, both scientific and artistic, but I’ve never received such a sheer quantity of literature. I felt like a college student stocking up on the term’s textbooks.
Inside, I discovered three inch-thick spiral-bound abstracts for all three conferences encompassed by the Toulouse Space Show: ENC-GNSS (my main focus), EFTF, and Space Applications Days, all in both English and French.
I also discovered a beautifully designed program (or, I should say programme), and, the most quixotic item, a Galileo comic book — err, graphic novel? — published by Thales Alenia Space. Finally, a document written for me and the other non-scientists! (Edited to add: Having now read the book, some of the contentions put forth are questionable. such as the contention that the GPS signal might be turned off by the military, or that Galileo will naturally prove superior.)
I just had time to get these goodies before settling in for the opening ceremony, a multi-media affair involving speeches, music, slideshows, and lighting effects. The speeches from local and regional officials communicated how passionate the people here are about all things space-related, in business, research, and education.
Between the speeches, a duo dressed in flight jumpsuits sang space-themed songs such as “Fly Me to the Moon,” “Walking on the Moon,” and the Beatles’ “Across the Universe” — you get the idea. As an aside, in February NASA broadcast “Across the Universe” to Polaris, the North Star, in the first-ever beaming of a radio song by the space agency directly into deep space, to celebrate the 40th anniversary of the song, the 45th anniversary of NASA’s Deep Space Network, and the 50th anniversary of NASA. Europe’s space program isn’t as old, but it makes up for age in enthusiasm. Each tune sung by the musicians was accompanied by a huge screen showing clips of moonwalks and space-related images of planets, nebulae, and our favorite, satellites. As a long-time fan of the space program, it certainly got me in the mood for the conference.
Tomorrow, technical sessions begin, followed by an evening gala to be held in the Cite de l’Espace, the premiere space museum. I can’t wait!
Raytheon Co. has won a $61 million U.S. Air Force contract from the GPS Wing to complete the development and certification of next-generation GPS receivers.
Under the Modernized User Equipment (MUE) program, circuit card technology will connect military users with new GPS navigation signals used in forthcoming enhanced GPS satellites. The receivers, which will be able to read the new M-code military signal, also will work effectively with legacy signal systems, Raytheon said.
“The MUE program is raising the capability of military GPS equipment while lowering the cost for the warfighter,” said Phil Kelton, MUE program manager for Raytheon’s GPS and navigation systems business. “Raytheon’s approach to MUE takes advantage of breakthroughs in microelectronics technology, coupled with advanced security solutions to enable higher performance and greater integrity at less cost than today’s systems.”
Kelton sees potential to achieve “true force-enhancing status” for military GPS capability though the proliferation of low-cost GPS modernized user equipment, according to the company. Raytheon is teamed on the program with General Dynamics and Trimble Navigation Systems.
“The award of this second phase of the systems design and development contract allows us to complete the custom building-blocks being developed for the next-generation M-code GPS receivers,” said Michael Crisp, director of Raytheon GPS and navigation systems. It is developing two different form factors for receiver cards; this will allow modular upgrades of Raytheon’s avionics, weapons and integrated sensor systems ahead of the full deployment of the GPS III satellite constellation, Crisp said.
In December of last year the U.S. Air Force also exercised a $50.7 million contract option with another contractor, Rockwell Collins, to complete part of the next phase of the MUE program. That work consists of receiver card development for ground and airborne applications, including test and security certification for next-generation GPS technology.
The Air Force awarded the initial MUE contract of $27.9 million to Rockwell Collins in 2006 to develop and demonstrate user segment receiver cards, establishing the first proof of design for the future GPS architecture. That contract, executed through October 2007, supported preliminary design of the modernized receiver cards.
While European regulatory authorities are closely scrutinizing the proposed TomTom/Tele Atlas merger, they have also turned their eyes to the proposed Navteq/Nokia deal.
Navteq Corp. said today that the European Commission has initiated a second-phase review of Nokia’s pending acquisition of Navteq. The company stressed in its announcement that this is part of the commission’s review process and does not signal the ultimate outcome. Nevertheless, it is a rare, if not extraordinary step for the commission; in the past 10 years it has only initiated a second-phase review in about 3 percent of European mergers of publicly held companies.
The Commission now has 90 working days to make a final decision on the transaction. However, the review period may be extended to 125 working days. Such has been the case with the TomTom/Tele Atlas deal, also under a second-phase review. Those two companies are anticipating a commission decision on their merger by May 21.
Both Navteq and Nokia said they remain committed to their merger plans, noting that the deal has received all the other necessary regulatory approvals, including anti-trust approval in the United States.
Meanwhile, TomTom said March 27 that it was extending the period of its offer for Tele Atlas. It was clear the European Commission wouldn’t reach a decision by the end of the previous time frame attached to the offer to acquire Tele Atlas for €30 per share, or about €2.9 billion, which would have ended March 31, TomTom said. As result, it has extended its offer to May 30. The Commission originally announced that it was initiating a second-phase review of the merger in November of last year.
Global Trek Xploration, a provider of embedded miniaturized GPS technologies, has completed a share exchange transaction merger with Deeas Resources Inc.
In conjunction with the transaction, the combined public entity is operating as GTX Corp. Global Trek Xploration is now wholly owned by GTX Corp, a publicly-held company, with shares quoted on the Over-The-Counter Bulletin Board (OTCBB : GTXO.OB). Patrick Bertagna, founder, current CEO, chairman of the board, and president of Global Trek Xploration, assumed those same duties for GTX Corp. while Jeffrey Sharpe, CEO and president of Deeas Resources Inc., joined GTX Corp’s board.
“The next logical step was for us to become a publicly traded company,” Bertagna said. “The influx of new capital gives us the ability to launch our unique, miniaturized GPS technologies on to the global stage. We look forward to continuing the momentum we have achieved and sharing our successes with our shareholders.”
Concurrent with the share exchange, GTX Corp. also completed an equity financing through a private placement of its common stock and stock purchase warrants for an aggregate amount of $8 million. The proceeds from the first tranche of financing will support the continued development of its miniaturized GPS real-time tracking technology and the licensing of its gpVector technology to branded consumer product partners.
By VASILIY ENGELSBERG, IVAN PETROVSKI, and VALERY BABAKOV
Similar in many aspects to GPS, GLONASS has performed much less successfully on a commercial scale, failing — so far — to create significant business worldwide. Today, however, the commercialization of GLONASS has taken a new and more promising direction, receiving strong encouragement from the Russian government. We look forward to GLONASS being completely restored to its full operational capabilities within the next few years, and we are certain that this time GLONASS will create successful business opportunities worldwide.
Why did GLONASS fail to create a worldwide business opportunity in the past? First, many GLONASS satellites of the first generation had required replacement at approximately the same time. This coincided with a difficult period for the Russian economy, after the collapse of the Soviet Union and much of its infrastructure. Budget for space applications suffered, not only for GLONASS, but other space programs that were temporarily frozen. Many companies that had started to work on combined GPS/GLONASS receivers worldwide stopped these initiatives at that time.
The other reason for GLONASS’s halting commercial history is in its frequency division multiple access (FDMA) signal structure instead of code division multiple access (CDMA), as is the case with GPS, and now Galileo. FDMA, though more immune to interference, results in bulkier user equipment. Today the situation may change in two respects. First, there is a possibility of introducing CDMA within GLONASS. Second, and even more important, today GNSS user equipment progresses toward multifrequency anyway with all the possible combinations of GPS, Galileo, L1, L2, and L5. It will ultimately boost the technology, and even multifrequency and wide-band RF components will be miniaturized.
All these considerations allow us to confidently foresee exceptional opportunities for GLONASS-related business tomorrow.
Policy. Today, GLONASS is required for social infrastructure within Russia for all federal users. President Vladimir Putin has paid special attention to rapid GLONASS development, urging completion of the system ahead of the original plan.
As expected, three more GLONASS-M satellites were launched by the end of 2007, and have since been declared operational. GLONASS-M satellites have a guaranteed lifespan of seven years, that is, the lifespan of these satellites runs until the year 2015.
There is also a new generation of satellites, GLONASS-K. This upcoming modification represents an entirely new concept based on a non-pressurized platform. The estimated service life of GLONASS-K satellites has been increased to 10–12 years, and the spacecraft will carry an additional third civilian L-range frequency.
GLONASS-K is smaller and considerably lighter than previous models, allowing the use of a wider range of launch vehicles and thus making them less costly to put into orbit. The weight of a GLONASS-K satellite falls to 700 kilograms instead the of 1,415 kilos of previous satellites. After the complete constellation is deployed, it will require one Soyuz launch per year to maintain the constellation in full.
We expect that at least six GLONASS-M satellites will be launched in 2008, and six more in 2009. There will also be two GLONASS-K satellites launched in 2009. The earlier satellites with three-year lifespans will be decommissioned.
Altogether, there should be 24 satellites in near-circular orbits with 64.8-degree inclination in three orbital planes. Initially, system completion was planned by the year 2012, but with close attention from the Russian government, the system may be deployed in full scale by the end of 2009.
Interoperability. Moving as planned toward interoperability with GPS and future Galileo, the GLONASS coordinate frame had been changed. According to the Russian Federation government decree issued on June 20, 2007, the improved version of the national geocentric coordinate system “Earth Parameters 1990” (PZ-90.02) has been applied to GLONASS. The transformation between PZ-90.02 and the International Terrestrial Reference Frame ITRF2000 contains only origin shifts along X, Y, Z by –36, +8, and +18 centimeters, respectively. An update to the GLONASS Interface Control Document has already been published and made available trough the Internet. The update to ICD, current information on GLONASS status, and a current almanac is available from the Information-Analytical Center (IAC).
Worldwide Use
All restrictions on positioning service in Russia were lifted in January 2007, including a restriction on allowed positioning accuracy. This was one of the barriers that limited GLONASS commercialization in the past.
Today, GLONASS plus GPS user equipment appears more and more frequently in stores in Russia. It is now necessary and highly popular equipment for airplanes, marine applications, surveyors, mapping applications, and so on.
What advantages does GLONASS offer to worldwide users who already have GPS? Due to its orbit inclination, GLONASS provides better coverage than GPS in northern latitudes. It was designed for use in the territory of the former Soviet Union and Europe. The combined usage of the two systems allows better coverage over the full globe.
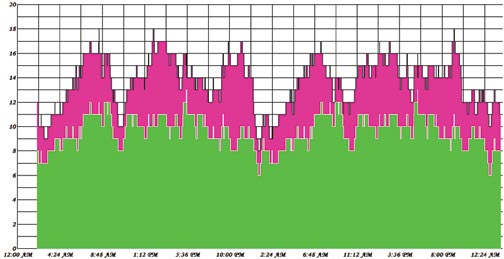
FIGURE 1. GPS (green) and GLONASS (pink) constellation visibility in Tokyo for 48 hours. Note that GPS visibility picture repeat itself every 24 hours, and GLONASS visibility changes. It also illustrates why GLONASS satellite orbits are less affected by gravitational filed irregularities.
Further, more systems mean more reliable service. Healthy competition will only benefit users. Compatibility of the systems had been be improved and will be improving further. Two systems will provide higher accuracy and higher integrity.
The international GLONASS market can increase due to the fact that countries that do not own their satellite navigation system can provide some redundancy in their infrastructure if they implement GNSS from different owner/operators. This, however, becomes less important as other navigation satellite systems, such as Galileo, come to life. Also, more satellites will benefit users, who operate in urban or other obstructed environments.
Accuracy. It has been generally accepted that the real-time accuracy of GLONASS is less than that of GPS. The main source of accuracy degradation comes from broadcast ephemeris and clock parameters. For many users, it is possible to use precise ephemeris, freely available on the Internet from, for example, the International GNSS Service (IGS), formerly the International GPS Service, a voluntary federation of more than 200 worldwide agencies that pool resources and permanent GPS and GLONASS station data to generate precise GPS and GLONASS products.
We also have analytical centers similar to, and some within, the IGS. Four analytical centers wi
thin the IGS are estimating GLONASS ephemerides, and two of them are estimating GLONASS clocks. The accuracy of precise GLONASS ephemeris are within 4 centimeters, 1 sigma.
Using precise ephemeris, or differential service, a GLONASS user can mitigate the above-mentioned error sources and enjoy higher accuracy comparable with those of GPS. In the future, a global network, even a commercial one, can further benefit GLONASS in terms of higher real-time accuracy.
Summarizing, we expect the GLONASS market worldwide to grow, though less rapidly than the internal market in Russia. We see our business in providing global solutions, which includes GLONASS, GPS, and Galileo, to the global market of GNSS users worldwide. The standard for navigation systems in the future will be multifrequency, multi-constellation user equipment, and we are well on the way to meeting this standard.
VASILIY ENGELSBERG is president of NVS Technologies AG and co-founder of NAVIS.
IVAN PETROVSKI is NVS director. Among his numerous responsibilities, he is in charge of research and development and the Asia-Pacific region.
VALERY BABAKOV is co-founder and general manager of NAVIS. Babakov explains, “Our company is a center of the NAVIS group, which is the main supplier of GLONASS receivers in Russia. NAVIS itself is about a 300-person company. The main area of our activity is the creation of navigation and timing equipment, based on GLONASS/GPS signals.
“We produce technologies and equipment that use GLONASS and GPS signals, including navigation equipment for marine and airborne applications, devices of time-and-frequency synchronization for communication systems, and GPS, GLONASS, satellite-based augmentation systems (SBAS), and Galileo simulators.Our current GPS/GLONASS receiver Navior seems to present interest to a wide range of customers worldwide. “Working in today’s market, we are covering all components of user service starting from conceptual engineering, to technical project development, delivery, assembling and launching of equipment, and finally providing users with training, technical support, and maintenance during exploitation.
“As part of the process of integration of our technologies into the worldwide GNSS market, NVS Technologies had been established. NVS Technologies is a new company, which aims to bring a wide range of GNSS products to the market and is envisioned to combine the experience of Russian NAVIS and NAVIS Ukraine in GPS and GLONASS user equipment development with Swiss quality and expertise in international marketing.
“Our company group now is not only engaged in the GLONASS business, but also looking forward contributing to Galileo equipment development. We are participating in the Galileo Integrated Receiver for Advanced Safety of Life Equipment (GIRASOLE) project together with Thales Avionics and Thales Aleniaspace. Our part in the GIRASOLE project is to provide the Galileo L1/E5 simulator. To facilitate simulator development, we have built a Galileo prototype receiver, which can acquire and track the GIOVE-A signal. Working with our SN3806 simulator, the receiver can also make a positioning. In November 2007 our engineers conducted a three-day tutorial on our GNSS simulator in Thales Avionics premises in Valence.”
QuickBird satellite image of Kalutara Beach on the southwestern coast of Sri Lanka showing the receding waters and beach damage from the Sumatra tsunami.( Credit: Digital Globe)
How Ionospheric Observations Might Improve the Global Warning System
By Giovanni Occhipinti, Attila Komjathy, and Philippe Lognonné
Recent investigations have demonstrated that GPS might be an effective tool for improving the tsumani early-warning system through rapid determination of earthquake magnitude using data from GPS networks. A less obvious approach is to use the GPS data to look for the tsunami signature in the ionosphere.
INNOVATION INSIGHTS by Richard Langley
THE TSUNAMI generated by the December 26, 2004, earthquake just off the coast of the Indonesian island of Sumatra killed over 200,000 people. It was one of the worst natural disasters in recorded history. But it might have been largely averted if an adequate warning system had been in place.
A tsunami is generated when a large oceanic earthquake causes a rapid displacement of the ocean floor. The resulting ocean oscillations or waves, while only on the order of a few centimeters to tens of centimeters in the open ocean, can grow to be many meters even tens of meters when they reach shallow coastal areas. The speed of propagation of tsunami waves is slow enough, at about 600 to 700 kilometers per hour, that if they can be detected in the open ocean, there would be enough time to warn coastal communities of the approaching waves, giving people time to flee to higher ground.
Seismic instruments and models are used to predict a possible tsunami following an earthquake and ocean buoys and pressure sensors on the ocean bottom are used to detect the passage of tsunami waves. But globally, the density of such instrumentation is quite low and, coupled with the time lag needed to process the data to confirm a tsunami, an effective global tsunami warning system is not yet in place.
However, recent investigations have demonstrated that GPS might be a very effective tool for improving the warning system. This can be done, for example, through rapid determination of earthquake magnitude using data from existing GPS networks. And, incredible as it might seem, another approach is to use the GPS data to look for the tsunami signature in the ionosphere: the small displacement of the ocean surface displaces the atmosphere and makes it all the way to the ionosphere, causing measurable changes in ionospheric electron density.
In this month’s column, we look in detail at how a tsunami can affect the ionosphere and how GPS measurements of the effect might be used to improve the global tsunami warning system.
“Innovation” is a regular column that features discussions about recent advances in GPS technology and its applications as well as the fundamentals of GPS positioning. The column is coordinated by Richard Langley of the Department of Geodesy and Geomatics Engineering at the University of New Brunswick.
The December 26, 2004, earthquake-generated Sumatra tsunami caused enormous losses in life and property, even in locations relatively far away from the epicentral area. The losses would likely have never been so massive had an effective worldwide tsunami warning system been in place. A tsunami travels relatively slowly and it takes several hours for one to cross the Indian Ocean, for example. So a warning system should be able to detect a tsunami and provide an alert to coastal areas in its path. Among the strengths of a tsunami early-warning system would be its capability to provide an estimate of the magnitude and location of an earthquake. It should also confirm the amplitude of any associated tsunami, due to massive displacement of the ocean bottom, before it reaches populated areas. In the aftermath of the Sumatra tsunami, an important effort is underway to interconnect seismic networks and to provide early alarms quantifying the level of tsunami risk within 15 minutes of an earthquake.
However, the seismic estimation process cannot quantify the exact amplitude of a tsunami, and so the second step, that of tsunami confirmation, is still a challenge. The earthquake fault mechanism at the epicenter cannot fully explain the initiation of a tsunami as it is only approximated by the estimated seismic source. The fault slip is not transmitted linearly at the ocean bottom due to various factors including the effect of the bathymetry, the fault depth, and the local lithospheric properties as well as possible submarine landslides associated with the earthquake.
In the open ocean, detecting, characterizing, and imaging tsunami waves is still a challenge. The offshore vertical tsunami displacement (on the order of a few centimeters up to half a meter in the case of the Sumatra tsunami) is hidden in the natural ocean wave fluctuations, which can be several meters or more. In addition, the number of offshore instruments capable of tsunami measurements, such as tide gauges and buoys, is very limited. For example, there are only about 70 buoys in the whole world. As a tsunami propagates with a typical speed of 600–700 kilometers per hour, a 15-minute confirmation system would require a worldwide buoy network with a 150-kilometer spacing.
Satellite altimetry has recently proved capable of measuring the sea surface variation in the case of large tsunamis, including the December 2004 Sumatra event. However, satellites only supply a few snapshots along the sub-satellite tracks. Optical imaging of the shore hs successfully measured the wave arrival at the coastline (see ABOVE PHOTO), but it is ineffective in the open sea. At present, only ocean-bottom sensors and GPS buoy receivers supply measures of mid-ocean vertical displacement. In many cases, the tsunami can only be identified several hours after the seismic event due to the poor distribution of sensors. This delay is necessary for the tsunami to reach the buoys and for the signal to be recorded for a minimum of one wave period (a typical tsunami wave period is between 10 and 40 minutes) to be adequately filtered by removing the “noise” due to normal wave action.
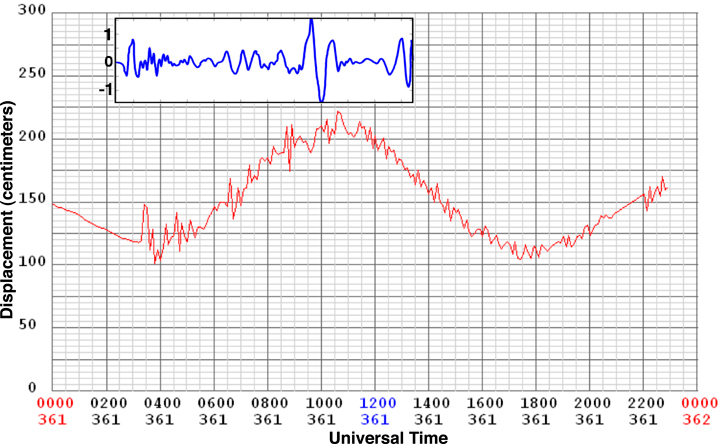
In the case of the December 2004 Sumatra event, the first tsunami measurements by any instrumentation were only made available about 3 hours after the earthquake. They were supplied by the real-time tide gauge at the Cocos Islands, an Australian territory in the southeast Indian Ocean (see FIGURE 1 where the tsunami signature is superimposed on the large semidiurnal tide fluctuation). Up until that time, the tsunami could not be fully confirmed and coastal areas remained vulnerable to tsunami damage. This delay in confirmation is a fundamental weakness of the existing tsunami warning systems.
Figure 1. The Sumatra tsunami signal measured at the Cocos Islands by the tide gauge (red) and by the co-located GPS receiver (blue). The tide gauge measures the sea-level displacement (tide plus superimposed tsunami) and the GPS receiver measures the slant total electron content perturbation (+/-1 TEC unit) in the ionosphere.
Ionospheric Perturbation. Recently, observational and modeling results have confirmed the existence and detectability of a tsunamigenic signature in the ionosphere. Physically, the displacement induced by tsunamis at the sea surface is transmitted into the atmosphere where it produces internal gravity waves (IGWs) propagating upward. (When a fluid or gas parcel is displaced at an interface, or internally, to a region with a different density, gravity restores the parcel toward equilibrium resulting in an oscillation about the equilibrium state; hence the term gravity wave.) The normal ocean surface variability has a typical high frequency (compared to tsunami waves) and does not transfer detectable energy into the atmosphere. In other words, the Earth’s atmosphere behaves as an “analog low-pass filter.” Only a tsunami produces propagating waves in the atmosphere. During the upward propagation, these waves are strongly amplified by the double effects of the conservation of kinetic energy and the decrease of atmospheric density resulting in a local displacement of several tens of meters per second at 300 kilometers altitude in the atmosphere. This displacement can reach a few hundred meters per second for the largest events.
At an altitude of about 300 kilometers, the neutral atmosphere is strongly coupled with the ionospheric plasma producing perturbations in the electron density. These perturbations are visible in GPS and satellite altimeter data since those signals have to transit the ionosphere. The dual-frequency signal emitted by GPS satellites can be processed to obtain the integral of electron density along the paths between the satellites and the receiver, the total electron content (TEC).
Within about 15 minutes, the waves generated at the sea surface reach ionospheric altitudes, creating measurable fluctuations in the ionospheric plasma and consequently in the TEC. This indirect method of tsunami detection should be helpful in ocean monitoring, allowing us to follow an oceanic wave from its generation to its propagation in the open ocean.
So, can ionospheric sounding provide a robust method of tsunami confirmation? It is our hope that in the future this technique can be incorporated into a tsunami early-warning system and complement the more traditional methods of detection including tide gauges and ocean buoys. Our research focuses on whether ground-based GPS TEC measurements combined with a numerical model of the tsunami-ionosphere coupling could be used to detect tsunamis robustly. Such a detection scheme depends on how the ionospheric signature is related to the amplitude of the sea surface displacement resulting from a tsunami. In the near future, the ionospheric monitoring of TEC perturbations might become an integral part of a tsunami warning system that could potentially make it much more effective due to the significantly increased area of coverage and timeliness of confirmation.
In this article, we’ll take a look at the current state of the art in modeling tsunami-generated ionospheric perturbations and the status of attempts to monitor those perturbations using GPS.
Some Background
Pioneering work by the Canadian atmospheric physicist Colin Hines in the 1970s suggested that tsunami-related IGWs in the atmosphere over the oceanic regions, while interacting with the ionospheric plasma, might produce signatures detectable by radio sounding.
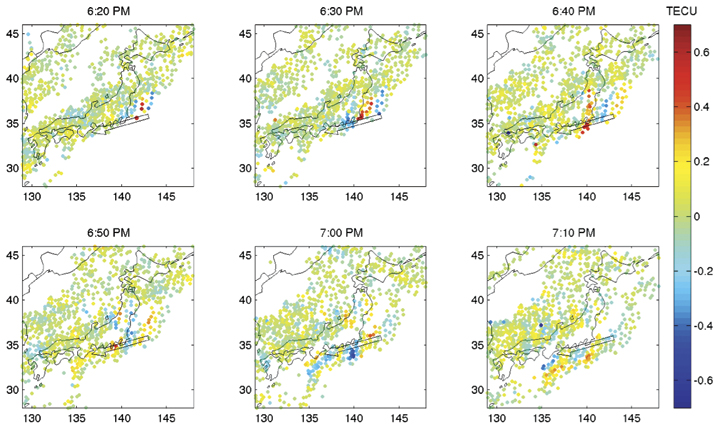
In June 2001, an episodic perturbation was observed following a tsunamigenic earthquake in Peru. After its propagation across the Pacific Ocean (taking about 22 hours), the tsunami reached the Japanese coast and its signature in the ionosphere was detected by the Japanese GPS dense network (GEONET). The perturbation, shown in FIGURE 2, has an arrival time and characteristic period consistent with the tsunami propagation determined from independent methods. Unfortunately, similar signatures in the ionosphere are also produced by IGWs associated with traveling ionospheric disturbances (TIDs), and are commonly observed in the TEC data. However, the known azimuth, arrival time, and structure of the tsunami allows us to use this data source, even if it contains background TIDs.
Figure 2. The observed signal for the June 23, 2001, tsunami (initiated offshore Peru). Total electron content variations are plotted at the ionosphere pierce points. A wave-like disturbance is seen propagating toward the coast of Honshu, the main island of Japan.
The December 26, 2004, Sumatra earthquake, with a magnitude of 9.3, was an order of magnitude larger than the Peru event and was the first earthquake and tsunami of magnitude larger than 9 of the so-called “human digital era,” comparable to the magnitude 9.5 Chilean earthquake of May 22, 1960.
In addition to seismic waves registered by global seismic networks, the Sumatra event produced infragravity waves (long-period wave motions with typical periods of 50 to 200 seconds) remotely observed from the island of Diego Garcia, perturbations in the magnetic field observed by the CHAMP satellite, and a series of ionospheric anomalies.
Two types of ionospheric anomaly were observed: anomalies of the first type, detected worldwide in the first few hours after the earthquake, were reported from north of Sumatra, in Europe, and in Japan. They are associated with the surface seismic waves that propagate around the world after an earthquake rupture (so-called Rayleigh waves).
Anomalies of the second type were detected above the ocean and were clearly associated with the tsunami. In the Indian Ocean, the occurrence times of TEC perturbations observed using ground-based GPS receivers and satellite altimeters were consistent with the observed tsunami propagation speed. The GPS observations from sites to the north of Sumatra show internal gravity waves most likely coupled with the tsunami or generated at the source and propagating independently in the atmosphere. The link with the tsunami is more evident in the observations elsewhere in the Indian Ocean. The TEC perturbations observed by the other ground-based GPS receivers moved horizontally with a velocity coherent with the tsunami propagation.
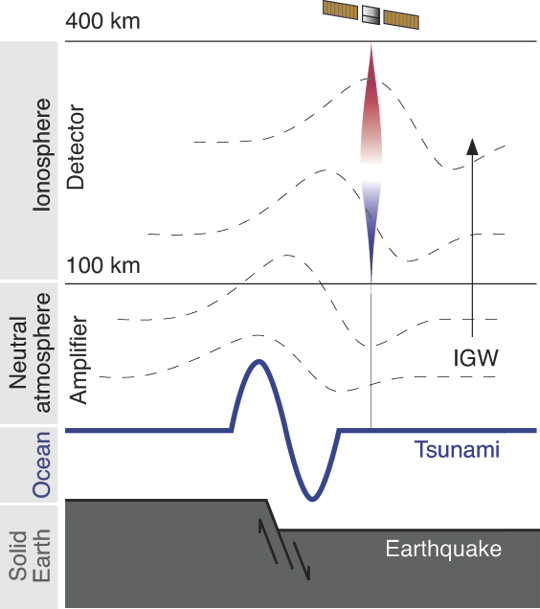
Figure 3. The tsunamigenic earthquake mechanism and transfer of energy in the neutral and ionized atmosphere. The solid Earth displacement produces the tsunami and the sea surface displacement produces an internal gravity wave in the neutral atmosphere, which perturbs the electron distribution in the ionosphere.
The amplitude of the observed TEC perturbations is strongly dependent on the filter method used. The four TECU-level peak-to-peak variations in filtered GPS TEC measurements from north of Sumatra are coherent with the differential TEC at the 0.4 TECU per 30 seconds level observed in the rest of the Indian Ocean. (One TEC unit or TECU is 1016 electrons per meter-squared, equivalent to 0.162 meters of range delay at the GPS L1 frequency.) Such magnitudes can be detected using GPS measurements since GPS phase observables are sensitive to TEC fluctuations at the 0.01 TECU level. We emphasize also the role of the elevation angle in the detection of tsunamigenic perturbations in the ionosphere. As a consequence of the integrated nature of TEC and the vertical structure of the tsunamigenic perturbation, low-elevation angle geometry is more sensitive to the tsunami signature in the GPS data, hence it is more visible.
The TEC perturbation observed at the Cocos Islands by GPS can be compared with the co-located tide-gauge (Figure 1). The tsunami signature in the data from the two different instruments shows a similar waveform, confirming the sensitivity of the ionospheric measurement to the tsunami structure.
The link between the tsunami at sea level and the perturbation observed in the ionosphere has been demonstrated using a 3D numerical modeling based on the coupling between the ocean surface, the neutral atmosphere, and the ionosphere (see FIGURE 3). The modeling reproduced the TEC data with good agreement in amplitude as well as in the waveform shape, and quantified it by a cross-correlation (see FIGURE 4). The resulting shift of +/-1 degree showed the presence of zonal and meridional winds neglected in the modeling. The presence of the wind can, indeed, introduce a shift of 1 degree in latitude and 1.5 degrees in longitude.
Since modeling is an effective method to discriminate between the tsunami signature in the ionosphere and other potential perturbations, the GPS observations can be a useful tool to develop an inexpensive tsunami detection system based on the ionospheric sounding.
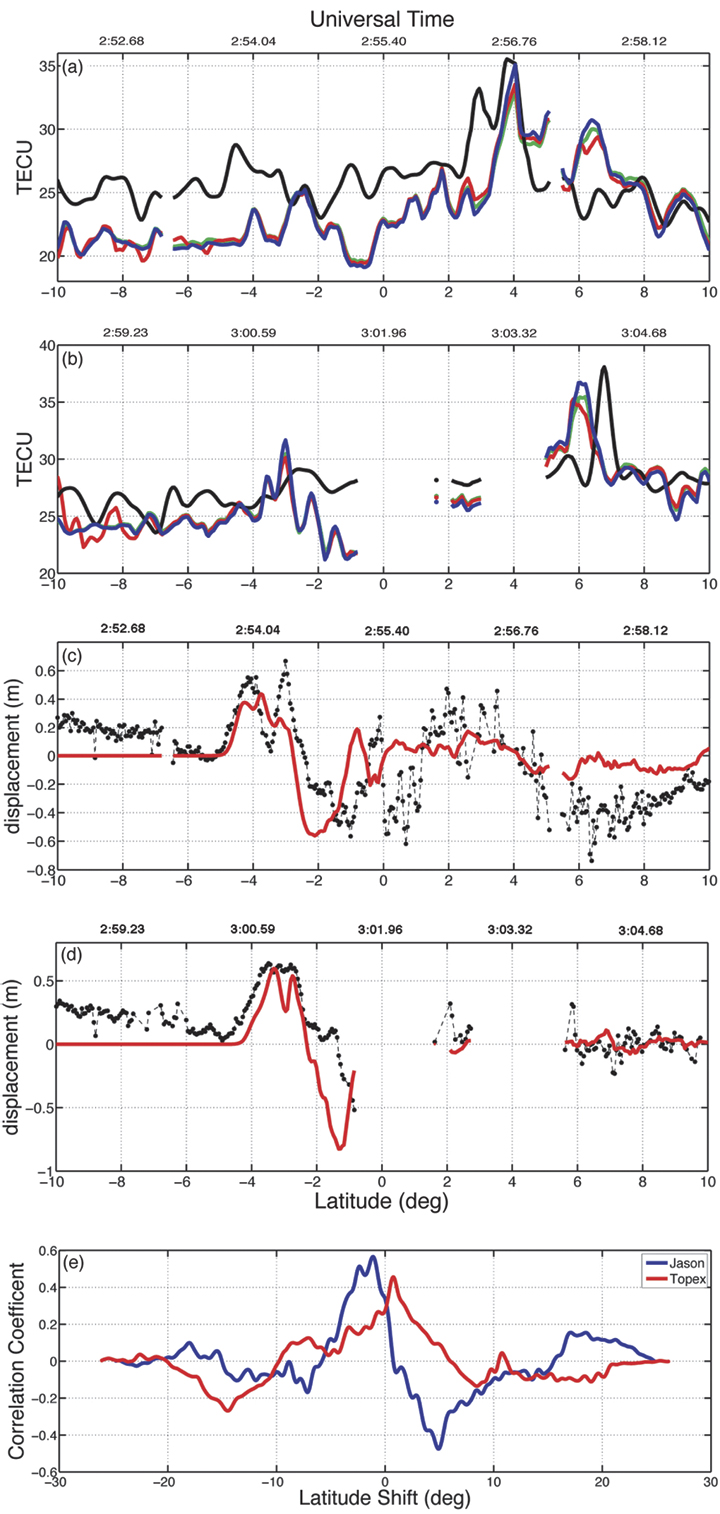
Figure 4. Satellite altimeter and total electron content (TEC) signatures of the Sumatra tsunami. The modeled and observed TEC is shown for (a) Jason-1 and for (b) Topex/Poseidon: data (black), synthetic TEC without production-recombination-diffusion effects (blue), with production-recombination (red), and production-recombination-diffusion (green). The Topex/Poseidon synthetic TEC has been shifted up by 2 TEC units. In (c) and (d), the altimetric measurements of the ocean surface (black) are plotted for the Jason-1 and Topex/Poseidon satellites, respectively. The synthetic ocean displacement, used as the source of internal gravity waves in the neutral atmosphere, is shown in red. In (e), the cross-correlations between TEC synthetics and data are shown for Jason-1 (blue) and Topex/Poseidon (red).
Modeling TEC Perturbations
A model to describe the effect of a tsunami on the ionosphere has been developed at the Institut de Physique du Globe de Paris (IPGP), France. It is comprised of three main parts. Firstly, it computes tsunami propagation using realistic bathymetry of, for example, the Indian Ocean. Secondly, an oceanic displacement is used to excite IGWs in the neutral atmosphere. Thirdly, it computes the response of the ionosphere induced by the neutral atmospheric motion resulting in enhanced electron densities. After integrating the electron densities, we obtain modeled (synthetic) TEC data. The modeling steps are as follows:
Tsunami Propagation. Tsunami modeling is an established science and the propagation of tsunamis is generally based on a shallow-water hypothesis. Under this hypothesis, the ocean is considered as a simple layer where the ocean depth, h, is locally taken into account in the tsunami propagation velocity, v = √ hg, which directly depends on h and the gravity acceleration g. The modeling, usually based on finite differences, solves the appropriate hydrodynamic equations.
Neutral Atmosphere Coupling. A tsunami is an oceanic gravity wave and its propagation is not limited to the oceanic surface; as previously discussed, the ocean displacement is transferred to the atmosphere where it becomes an internal gravity wave. This coupling phenomenon is linear and can be reproduced solving the wave propagation equations, nominally the continuity and the so-called Navier-Stokes equations. These equations are solved assuming the atmosphere to be irrotational, inviscid, and incompressible. The IGWs are, indeed, imposed by displacement of the mass under the effect of the gravity force, contrary to the elastic waves generated by compression (for example, sound waves), so the medium can be considered incompressible. FIGURE 5 shows the IGWs produced by the Sumatra tsunami. The inversion of the velocity with altitude (wind shear) is a typical structure of IGWs.
Neutral-Plasma Coupling. The tsunamigenic IGWs are injected into a 3D ionospheric model to reproduce the induced electron density perturbations. In essence, the coupling model solves the hydromagnetic equations for three ion species (O2 + , NO+ , and O+ ). Physically, the neutral atmosphere motion induces fluctuations in the plasma velocity by way of momentum transfer driven by collision frequency and the Lorentz term associated with Earth’s magnetic and electric fields. Ion loss, recombination, and diffusion are also taken into account in the ion continuity equation. Finally, the perturbed electron density is inferred from ion densities using the charge neutrality hypothesis. The International Reference Ionosphere model is used for background electron density; SAMI2 (a recursive acronym: SAMI2 is Another Model of the Ionosphere) is used for collision, production, and loss parameters; and a constant geomagnetic field is assumed based on the International Geomagnetic Reference Field. FIGURE 5 shows the perturbation induced in the ionospheric plasma by the tsunamigenic IGW following the Sumatra event. The perturbation is strongly localized to around 300 kilometers altitude where the electron density background is maximized.
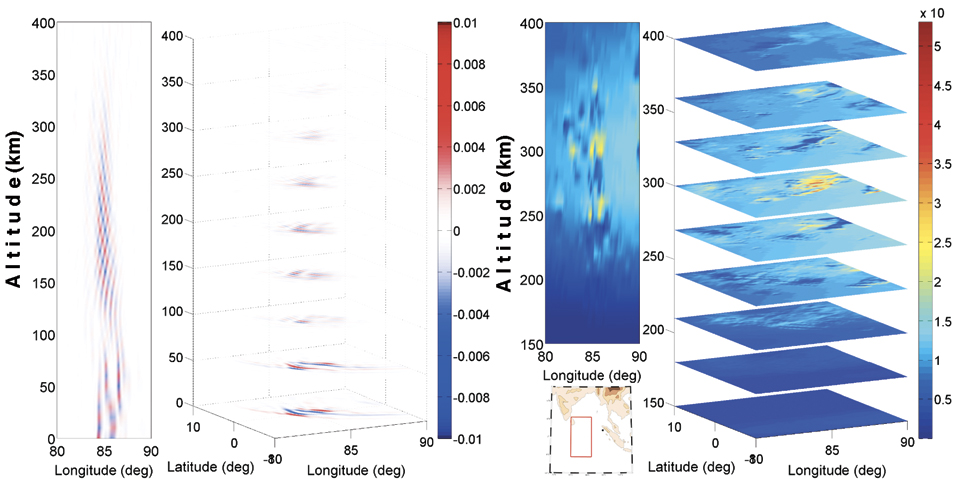
Figure 5. Internal gravity waves (IGWs) generated by the Sumatra tsunami and the response of the ionosphere to neutral motion at 02:40 UT (almost two hours after the earthquake). On the left, the normalized vertical velocity induced by tsunami-generated IGWs in the neutral atmosphere is shown. On the right, the perturbation induced by IGWs in the ionospheric plasma (in electrons per cubic meter) is shown, with the maximum perturbation at an altitude of about 300 kilometers. The vertical cut shown in these profiles is at a latitude of -1 degree.
The resulting electron density dynamic model described above allows us to compute a map of the perturbed TEC by simple vertical integration (see FIGURE 6). In addition to the geometrical dispersion of the tsunami, the TEC map shows horizontal heterogeneities in the electron density perturbation that are induced by the geomagnetic field inclination. The magnetic field plays a fundamental role in the neutral-plasma coupling, resulting in a strong amplification at the magnetic equator where the magnetic field is directed horizontally. The isolated perturbation appearing more to the south is probably induced by the full development of the IGW in the atmosphere. Recent work also explains this second perturbation as induced by the role of the magnetic field in the neutral-plasma coupling.
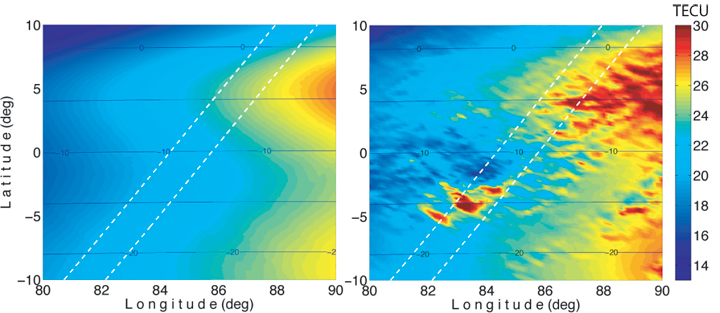
Figure 6. The signature of the Sumatra tsunami in total electron content (TEC) at 03:18 UT (right) compared with the unperturbed TEC (left). The TEC images have been computed by vertical integration of the perturbed and unperturbed electron density fields. The broken lines represent the Topex/Poseidon (left) and Jason-1 (right) trajectories. The blue contours represent the geomagnetic field inclination.
GPS Data Processing
To validate our model, we use ground-based GPS receivers to look for the ionospheric signal induced by tsunamis. Prior research has shown post-processed results detecting a tsunami-generated TEC signal using regional GPS networks such as GEONET in Japan (about 1,000 stations) or the Southern California Integrated GPS Network (about 200 stations). Those studies benefited from the very high density of GPS receivers in the regional networks, so that, for example, no forward modeling was needed to help initially identify the characteristics of the tsunami-generated signal.
High-Precision Processing. More than 1,300 globally-distributed dual-frequency GPS receivers are available using publicly accessible networks, including those of the International GNSS Service and the Continuously Operating GPS Stations coordinated by the U.S. National Geodetic Survey. Most researchers estimate vertical ionospheric structure and, simultaneously, treat hardware-related biases as nuisance parameters. In our approach for calibrating GPS receiver and satellite inter-frequency biases, we take advantage of all available GPS receivers using a new processing technique based on the Global Ionospheric Mapping software developed at the Jet Propulsion Laboratory (JPL). FIGURE 7 shows a JPL TEC map using 1,000 GPS stations. This new capability is designed to estimate receiver biases for all stations in the global network. We solve for the instrumental biases by modeling the ionospheric delay and removing it from the observation.
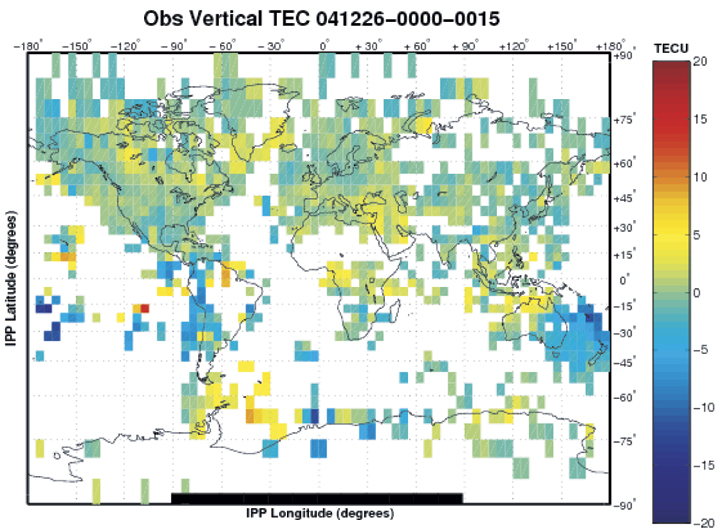
Figure 7. The total electron content (TEC) between 01:00 and 01:15 UT on December 26, 2004, at ionosphere pierce points (IPPs) provided by a global network of more than 1,000 GPS tracking stations. To highlight variations, a five-day average of TEC has been subtracted from the observed TEC.
Ionospheric Warning System
The currently implemented tsunami warning system uses seismometers to detect earthquakes and to perform an estimation of the seismic moment by monitoring seismic waves. After a potential tsunami risk is determined, ocean buoy and pressure sensors have to confirm the tsunami risk. Unfortunately, the number of available ocean buoys is limited to about 70 over the whole planet. With the existing system, it may take several hours to confirm a tsunami when taking into account both the propagation time (of tsunamis reaching buoys) and data-processing time. On the other hand, the proposed ionosphere-based tsunami detection system may only require the propagation time and data-processing delays of only up to about 15–30 minutes. GPS receivers are able to sound the ionosphere up to about 20 degrees away from the receiver location, and a dense GPS network can therefore increase the coverage of the monitored area.
The fundamental idea behind a detection method is that we need to separate tsunami-generated TEC signatures from other sources of ionospheric disturbances. However, the tsunami-generated TEC perturbations are distinguishable because they are tied to the propagation characteristics of the tsunami. Tsunami-related fluctuations should be in the gravity-wave period domain and cohere in geometry and distance with the earthquake epicenter (for example, they show up in data on multiple satellites from multiple stations and, with increasing distance from the epicenter, at a rate related to tsunami propagation speed).
The coupled tsunami model described earlier can also be used to compute a prediction for the tsunami-generated TEC perturbation based on the seismic displacement as an input parameter to the model. The model prediction may be used as a detection aid by indicating the location of the tsunami wave front with time. This permits us to focus our detection efforts on specific locations and times, and will allow us to discriminate signal from noise.
The model also provides information on the expected magnitude of the TEC perturbation. This provides further value in filter discrimination. Cross-correlations can be performed on nearby observations using different satellites and stations to take advantage of tsunami-related perturbations being coherent in geometry and distance from the epicenter. Once the signal is detected in data from multiple satellites and stations, we can “track” and image the tsunami during its propagation in space and time.
The goal of our research is to assess the feasibility of detecting tsunamis in near real time. This requires that GPS data be acquired rapidly. Rapid availability of ground-based GPS data has been demonstrated via the NASA Global Differential GPS System, a highly accurate, robust real-time GPS monitoring and augmentation system.
Conclusions
Earlier research using GPS-derived TEC observations has revealed TEC perturbations induced by tsunamis. However, in our research, we use a combination of a coupled ionosphere-atmosphere-tsunami model with large GPS data sets. Ground-based GPS data are used to distinguish tsunami-generated TEC perturbations from background fluctuations. Tsunamis are among the most disrupting forces humankind faces. The December 26, 2004, earthquake and resulting tsunami claimed more than 200,000 lives, with several hundreds of thousands of people injured. The damage in infrastructure and other economic losses were estimated to be in the range of tens of billions of dollars. To help prevent such a global disaster from occurring again, we suggest that ionospheric sounding by GPS be integrated into the existing tsunami warning system as soon as possible.
Acknowledgments
This article is based on the paper “Three-Dimensional Waveform Modeling of Ionospheric Signature Induced by the 2004 Sumatra Tsunami” published in Geophysical Research Letters. The authors wish to acknowledge François Crespon (Noveltis, Ramonville-Saint-Agne, France) for the TEC data analysis in Figure 1, Juliette Artru (Centre National d’Etudes spatiales – CNES, Toulouse, France) for her work on the detection of tsunamigenic TEC perturbations shown in this article, and Grégoire Talon for Figure 3. The IPGP portion of the work is sponsored by L’Agence Nationale de la Recherche, by CNES, and by the Ministère de l’Enseignement supérieur et de la Recherche. The first author would also like to thank John LaBrecque of NASA’s Science Mission Directorate for supporting his fellowship at the California Institute of Technology/JPL.
GIOVANNI OCCHIPINTI received his Ph.D. at the Institut de Physique du Globe de Paris (IPGP) in 2006. In 2007, he joined NASA’s Jet Propulsion Laboratory (JPL), California Institute of Technology, as a postdoctoral fellow to continue his work on the detection and modeling of tsunamigenic perturbations in the ionosphere. He will soon take up the position of assistant professor at the University of Paris and IPGP. His scientific interests are focused on solid Earth-atmosphere-ionosphere coupling.
ATTILA KOMJATHY is senior staff member of the Ionospheric and Atmospheric Remote Sensing Group of Tracking Systems and Applications Section at JPL, specializing in remote sensing techniques. He received his Ph.D. from the Department of Geodesy and Geomatics Engineering at the University of New Bruns-wick, Canada, in 1997. He has received the Canadian Governor General’s Gold Medal for Academic Excellence and NASA awards including an Exceptional Space Act Award.
PHILIPPE LOGNONNÉ is the director of the Space Department of IPGP, a professor at the University of Paris VII, and a junior member of the Institut Universitaire de France. His science interests are in the field of remote sensing and are related to the detection of seismic waves and tsunamis in the ionosphere. Also, he participates in several projects in planetary seismology.
FURTHER READING
Ionospheric Seismology
“3D Waveform Modeling of Ionospheric Signature Induced by the 2004 Sumatra Tsunami” by G. Occhipinti, P. Lognonné, E. Alam Kherani, and H. Hebert, in Geophysical Research Letters, Vol. 33, L20104, doi:10.1029/2006GL026865, 2006.
“Ground-based GPS Imaging of Ionospheric Post-seismic Signal” by P. Lognonné, J. Artru, R. Garcia, F. Crespon, V. Ducic, E. Jeansou, G. Occhipinti, J. Helbert, G. Moreaux, and P.E. Godet in Planetary and Space Science, Vol. 54, No. 5, April 2006, pp. 528–540.
“Tsunamis Detection in the Ionosphere” by J. Artru, P. Lognonné, G. Occhipinti, F. Crespon, R. Garcia, E. Jeansou, and M. Murakami in Space Research Today, Vol. 163, 2005, pp. 23–27.
“On the Possible Detection of Tsunamis by a Monitoring of the Ionosphere” by W.R. Peltier and C.O. Hines in Journal of Geophysical Research, Vol. 81, No. 12, 1976, pp. 1995–2000.
“Unusual Topside Ionospheric Density Response to the November 2003 Superstorm” by E. Yizengaw, M.B. Moldwin, A. Komjathy, and A.J. Mannucci in Journal of Geophysical Research, Vol. 111, A02308, doi:10.1029/2005JA011433, 2006.
“Automated Daily Processing of More than 1000 Ground-based GPS Receivers for Studying Intense Ionospheric Storms” by A. Komjathy, L. Sparks, B.D. Wilson, and A.J. Mannucci in Radio Science, Vol. 40, RS6006, doi:10.1029/2005RS003279, 2005.
“Space Weather: Monitoring the Ionosphere with GPS” by A. Coster, J. Foster, and P. Erickson in GPS World, Vol. 14, No. 5, May 2003, pp. 42–49.
“GPS, the Ionosphere, and the Solar Maximum” by R.B. Langley in GPS World, Vol. 11, No. 7, July 2000, pp. 44–49.
European chip maker NXP Semiconductors plans to acquire U.S.-based fabless GPS chip maker GloNav Inc., the companies announced today.
NXP will purchase the company for $85 million in cash plus up to $25 million more, contingent upon GloNav reaching certain revenue and product development milestones over the next two years. The transaction will give NXP immediate access to GloNav’s GPS products and technology, including its single-chip and 90nm design capability, the company said. It expects the deal to close in Q1 2008.
“This is the second major acquisition that we have made this year to strengthen our Mobile and Personal Business Unit that quickly adds complementary technologies to our existing portfolio and meets our customers’ demands for innovative products,” said Frans van Houten, NXP CEO. “We are a leader in cellular system solutions. Combining GloNav’s GPS expertise with NXP’s FM Radio, Bluetooth, USB and NFC leadership, enables us to offer a broader connectivity suite to the mobile phone market.
“We already turned the cell phone into a multimedia wallet,” he continued. “It’s only natural that we also want to use our mobile phones to navigate and to find local goods and services. GPS integration allows us to create these and many more interesting and dynamic features, continuously enriching the cell phone in our pocket.”
GloNav has approximately 50 employees and contractors at locations in the United States, United Kingdom, Ireland and Taiwan. It will join NXP’s Mobile and Personal Business Unit.
With the merger pending, GloNav investor Ceva Inc. said that it will divest its ownership stake in the company. European private equity firm Atlantic Bridge Venture created GloNav in 2006 through the divestment of Ceva’s GPS technology and product lines and a merger with California-based RFDomus Inc. Ceva’s ownership in GloNav is 19.9 percent on a fully diluted basis.
The value of Ceva’s shareholding in GloNav, based on its ownership percentage and the acquisition purchase price, is approximately $17 million, more than four times the recorded value of approximately $4 million for the GloNav investment as accounted in in Ceva’s financial statements. “Today’s announcement that NXP Semiconductors is to acquire GloNav is great news for Ceva and in line with the company’s strategy to focus on its strength as a leading silicon intellectual property SIP provider for DSP cores, multimedia, Bluetooth and SATA products.” said Gideon Wertheizer, Ceva CEO.
Schlumberger has announced the acquisition of exclusive distribution rights to the oil and gas sector for MetaCarta‘s map-based geographic information search technologies. Schlumberger will acquire all existing contracts for MetaCarta in the oil and gas sector, resulting in a single source for sales and support of this technology in the industry.
“MetaCarta is the perfect compliment to expand the Schlumberger industry leadership in information management. With the increasing amount of information held in unstructured form, such as documents, presentations and web content, MetaCarta’s geographically specific access to unstructured content brings new power to petrotechnical professionals,” said Olivier Le Peuch, president, Schlumberger Information Solutions (SIS). “In combination with our geoscience and engineering information management solutions, now petrotechnical professionals will be able to rapidly incorporate all available information that is relevant to their prospect or field.”
MetaCarta search technology combines map-driven geographic search, geographic referencing, temporal filtering and data visualization capabilities, for both structured and unstructured content, making that content “location-aware.” This enables geoscientists and engineers to find and display relevant data in the context of their area of interest.
“The Schlumberger global sales and support organization will accelerate the expansion of MetaCarta solutions in the oil and gas industry,” said Ron Matros, president and chief executive officer, MetaCarta. “We look forward to bringing geographically relevant data search capabilities to a broader set of customers across the globe.”
Navteq Corp. said Wednesday that its stockholders have approved the company’s pending merger deal with Finnish mobile phone giant Nokia.
Shareholders representing more than 75 percent of the issued and outstanding shares of common stock eligible to vote and nearly 100 percent of the total votes cast at the special meeting Wednesday, voted in favor of the merger agreement. That move follows the company’s announcement late last week that it had received early termination of the mandatory waiting period under the U.S. Hart-Scott-Rodino Antitrust Improvements Act.
Upon satisfaction of the remaining closing conditions, under the terms of the merger deal each outstanding share of the common stock of Navteq will be converted into the right to receive $78 in cash, without interest, and Navteq will survive the merger as a wholly-owned subsidiary of Nokia Inc., according to the company. All unvested options to purchase common stock will accelerate and vest in full immediately prior to the consummation of the merger. Option holders will receive a cash payment for each option held equal to the excess of $78 over the applicable option exercise price, less taxes.