This column details the potential effects of crustal movement on published heights in various regions of the United States.
In my last column (in the April 2021 Survey Scene), I mentioned that the National Geodetic Survey (NGS) announced that it is suppressing height information in Southeast Texas.
The April column also highlighted one of NGS’ four use cases – “Use Case 1: Flood Mapping.” The case study discusses the Elevation Certificate (CE) Example, Flood Insurance Rate Map (FIRM) and Flood Insurance Study (FIS).
The column highlighted the potential effects of subsidence on published heights in the Houston region, which implied that most of the published heights that are based on older surveys in the region are not current or accurate.
This column will provide more details of the suppression of heights in the Southeast Texas region, and potential effects of crustal movement on published heights in other regions of the United States.
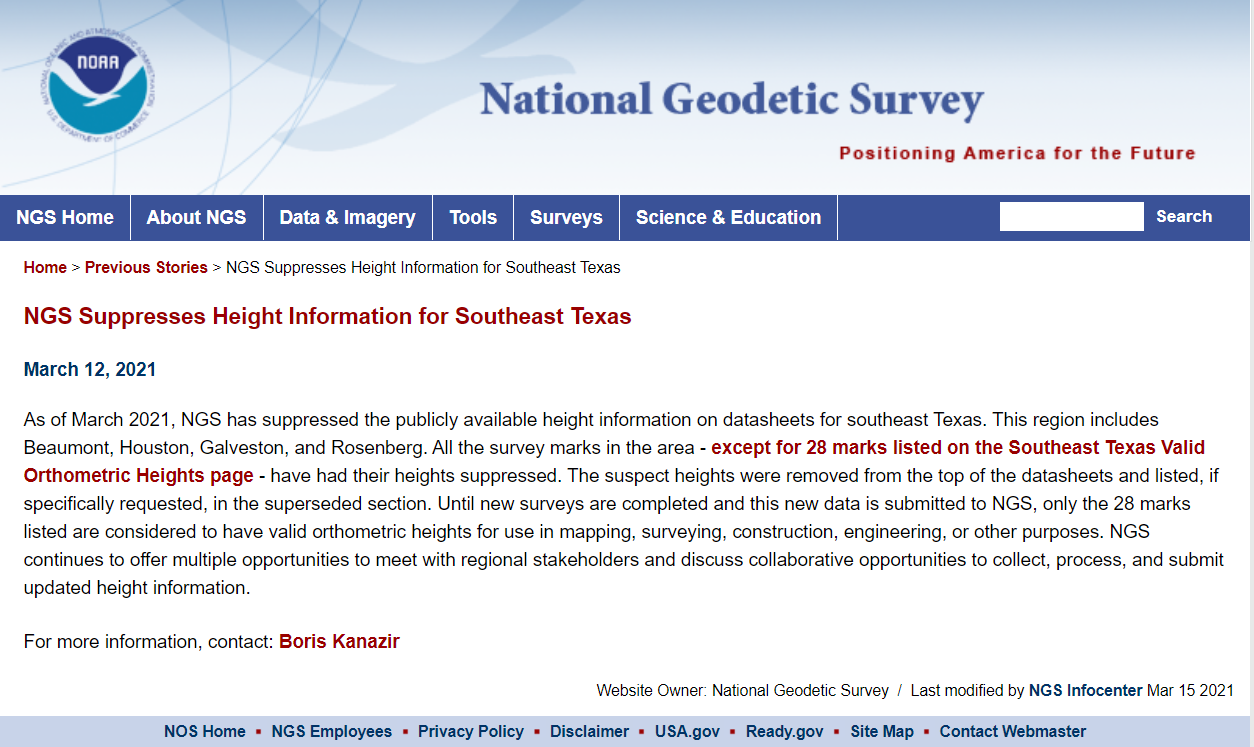
According to NGS’ announcement, only 28 marks will have publicly available orthometric heights on NGS datasheets in Southeast Texas.
The “Link to Map: SE TX Valid Ortho. Heights” button provides the benchmarks available to users (see the box titled “Link to Map SE TX Valid Ortho Heights”). The website provides links to the published stations.
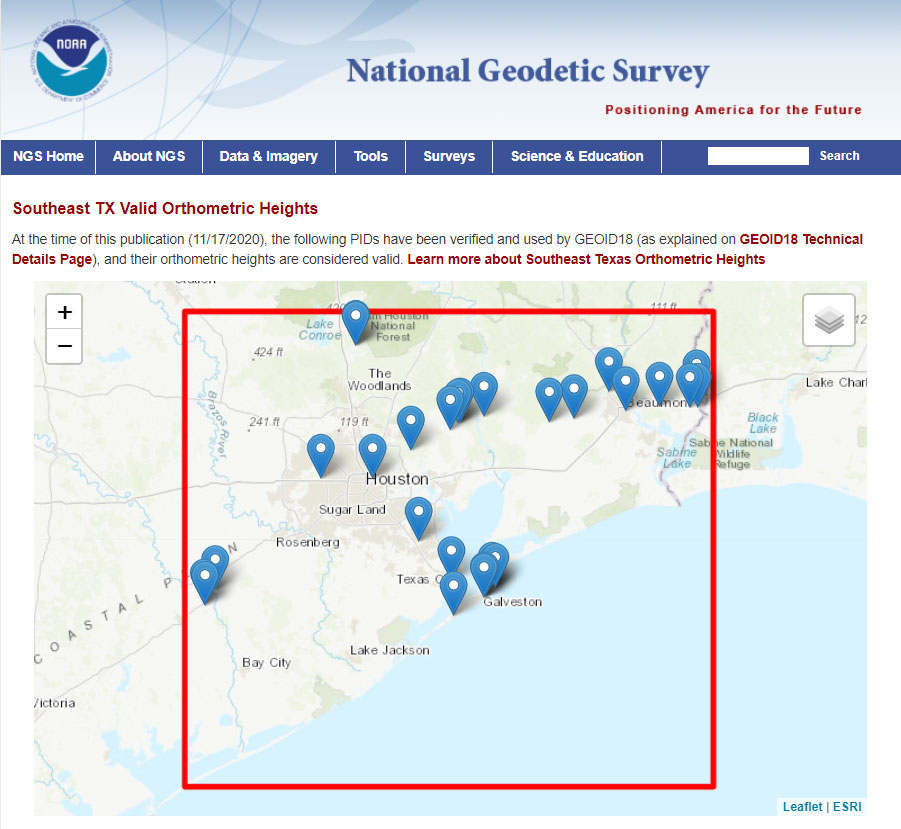
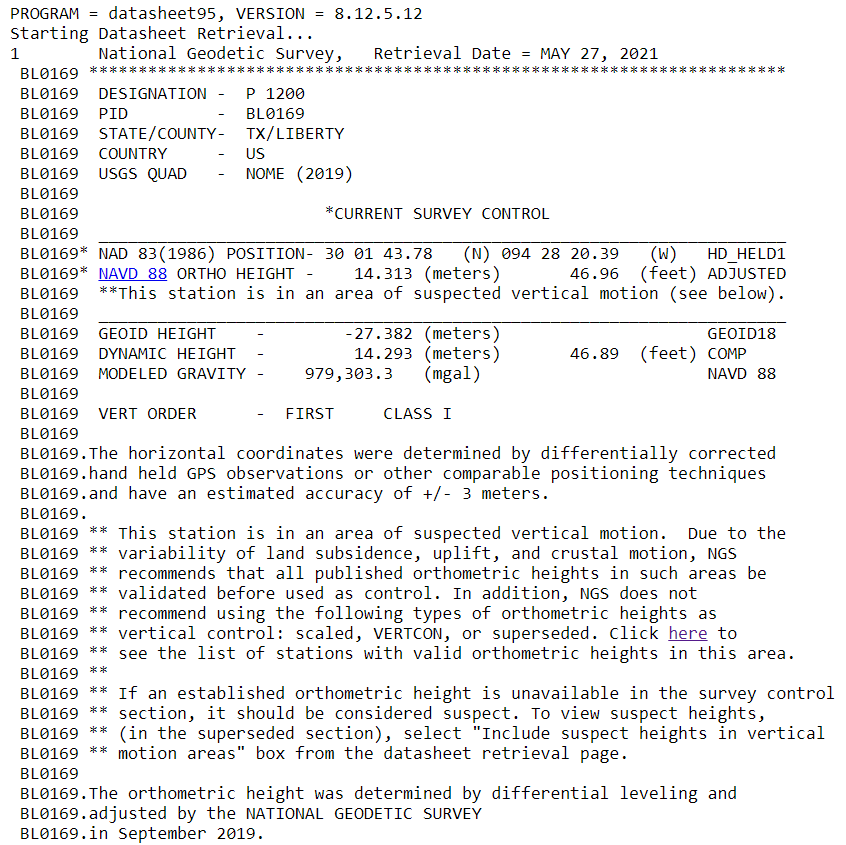
Clicking on an icon provides the PID and name of the station with a link to a datasheet. Click “Get Datasheet” for a datasheet of the station. Below is an excerpt from the datasheet of Station P 1200.
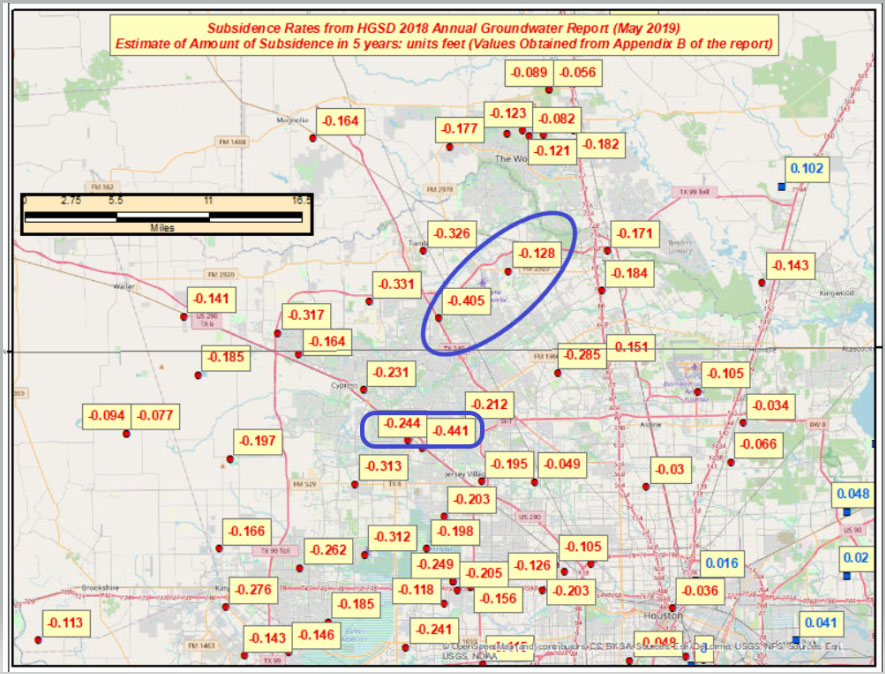
Let’s address why NGS is suppressing the stations in Southeast Texas. My last column provided plots depicting the amount of movement in the Harris-Galveston, Texas, region. See the box titled “Estimate of Amount of Subsidence in 5 Years in Harris-Galveston, Texas, Region – Units Feet.”
As indicated in the plot, some of the marks are estimated to have moved almost ½ foot (approximately 0.15 meters) in 5 years. In addition, some of the relative height differences approach 1/3 of a foot (approximately 0.1 meter) between neighboring stations. See the highlighted stations in the box titled “Estimate of Amount of Subsidence in 5 Years in Harris-Galveston, Texas, Region – Units Feet.”
The last major releveling incorporated into NGS’ Database in the Harris-Galveston, Texas, region was performed more than 30 years ago in the 1986/1987 timeframe. Therefore, some of the published stations in the region could have subsided more than three feet (or about a meter).
As stated in NGS’ Blueprint 3, “Most leveling data in NGS archives comes from the mid-20th century, in support of the NAVD 88 project.” Of course, most regions of the United States are not subsiding at the same rates as in the Houston-Galveston, Texas, region.
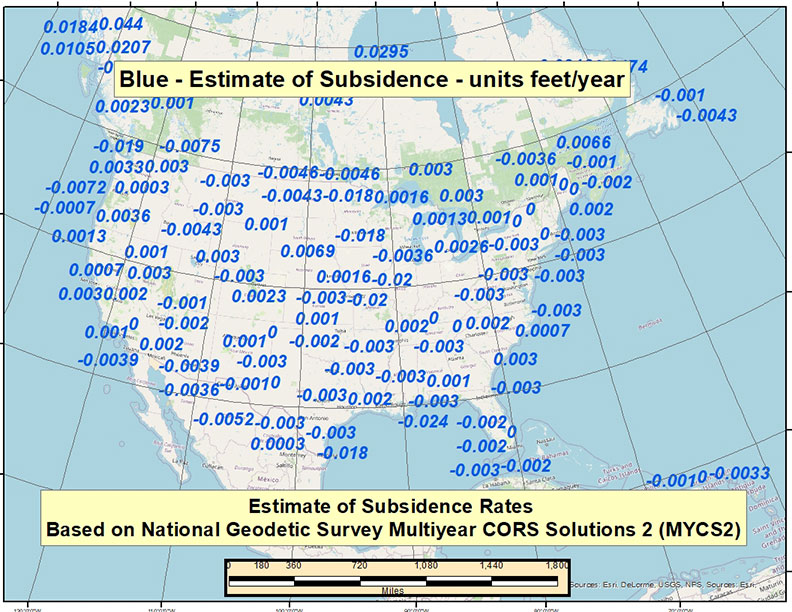
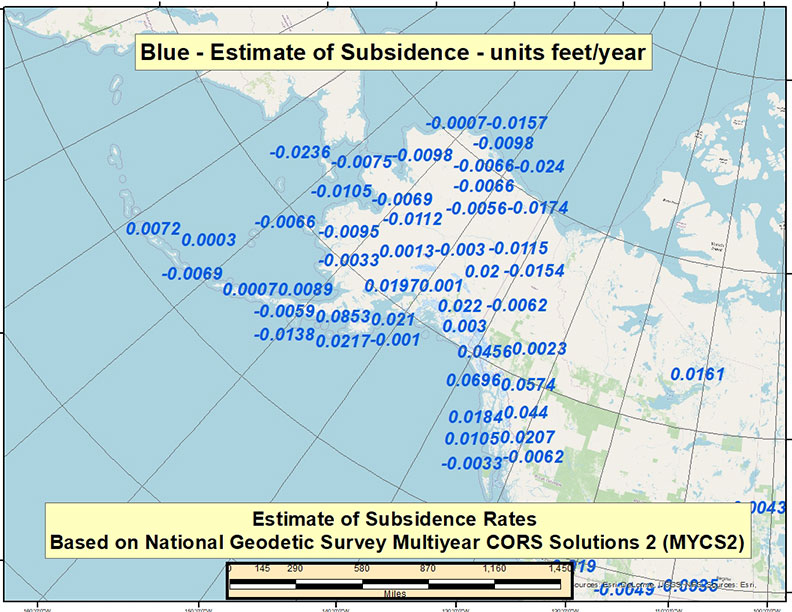
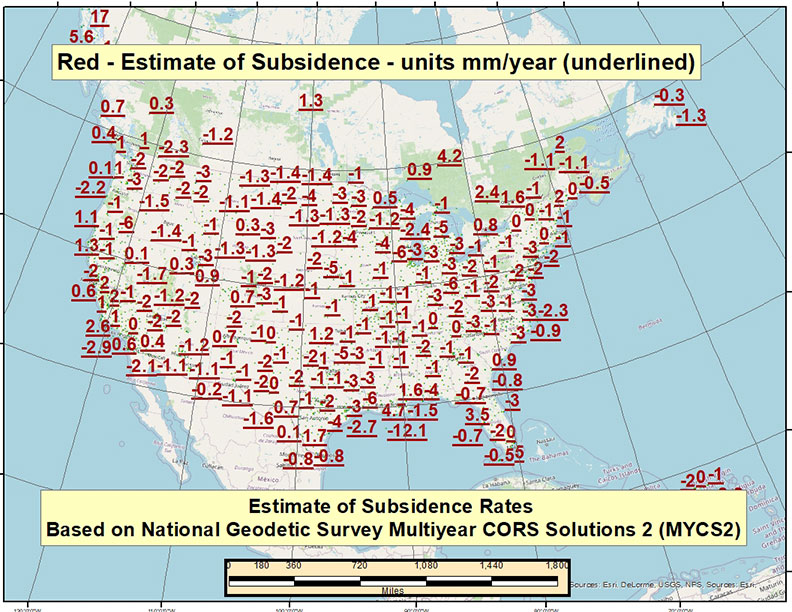
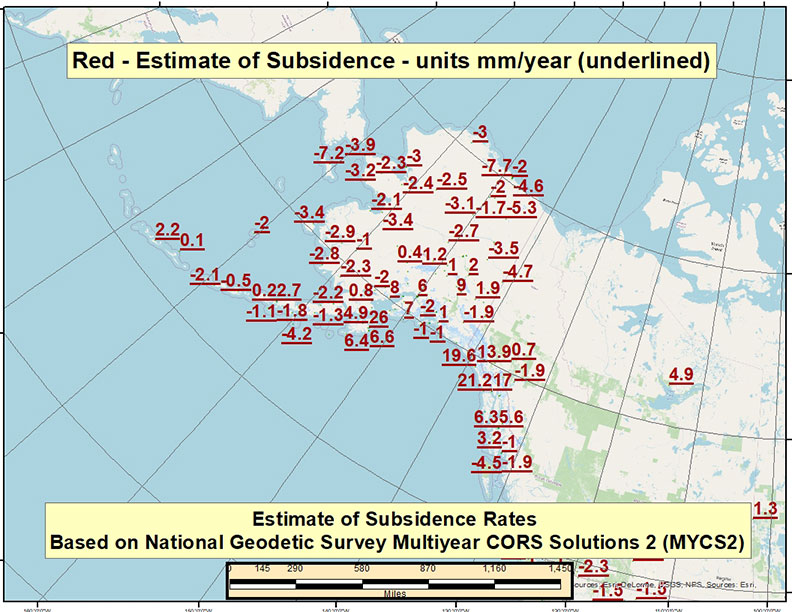
In a previous newsletter, I discussed NGS’ second Multi-Year CORS Solution of the National CORS (MYCS2). I downloaded the coordinates and velocities from NGS’ website and created a plot of the vertical velocities. For those who prefer to use feet as opposed to meters, I provided velocities with units in feet/year and mm/year.
See the boxes titled “Estimate of Velocity Rates Based on MYCS2 – CONUS (feet/year),” “Estimate of Velocity Rates Based on MYCS2 – Alaska (feet/year),” “Estimate of Velocity Rates Based on MYCS2 – CONUS (mm/year)” and “Estimate of Velocity Rates Based on MYCS2 – Alaska (mm/year).”
It should be noted that the intent of these four plots is to provide a wide-ranging view of the values and some of the variation in rates across the United States.
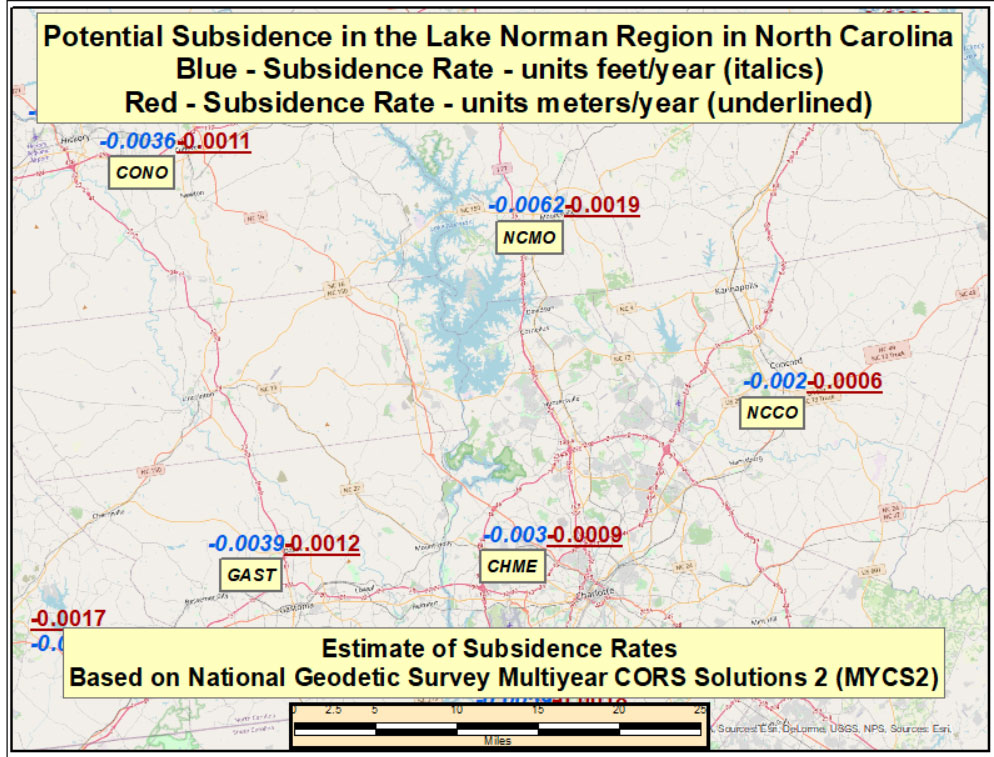
The rates appear to be small in most regions of the United States. As an example, the rates are all less than -0.0062 feet/year (-0.0019 meters/year) in the Lake Norman region in North Carolina (see the box titled “Potential Subsidence Rates in the Lake Norman Region in North Carolina). It would take many years for the crustal movement to make a difference to some projects in this region.
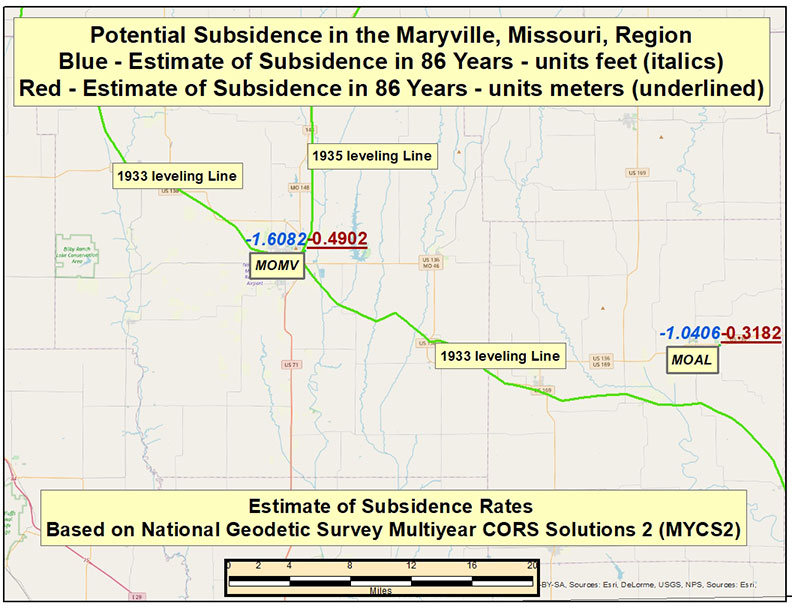
That said, let’s look at another region of the country. For example, in the vicinity of Maryville, Missouri, the rate of subsidence is around -0.0187 feet/year (-0.0057 meters/year). See the box titled “Potential Subsidence Rates in the Maryville, Missouri, Region.” These subsidence rates don’t appear to be large values but if you take into account the last time the height of a mark was established by leveling data it could result in a large difference from the true orthometric height.
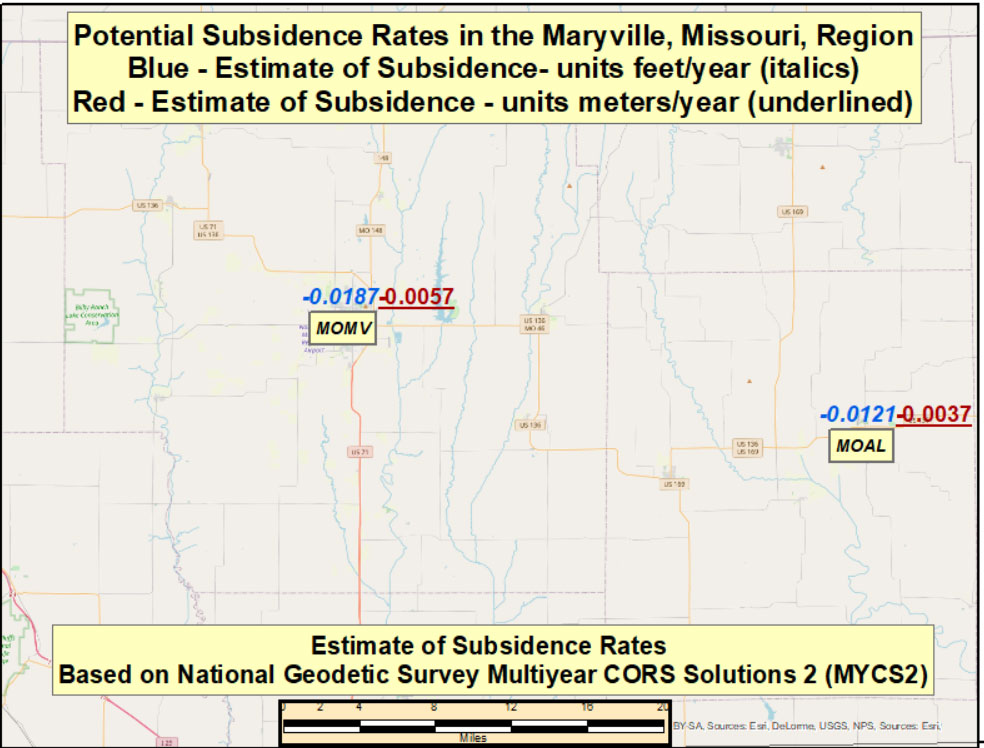
According to NGS’ database, it appears that many of the marks in the Maryville, Missouri, region were last leveled in 1935. I used NGS’ Passive Mark Lookup tool and Leveling Project Page tool to identify the marks and associated leveling lines in the area of the CORS stations in the Maryville, Missouri, region.
I described the Passive Mark Lookup webtool in a previous column. As previously mentioned, these subsidence rates all seem very small, but if you take into account the last time the height of mark was established by leveling data, the subsidence value can be very large.
See the box titled “Potential Subsidence in 86 Years in the Maryville, Missouri, Region.” The box indicates that, if you account for the last 86 years (2021 – 1935), the potential subsidence exceeds 1½ feet (-1.6082 feet, -0.4902 meters).
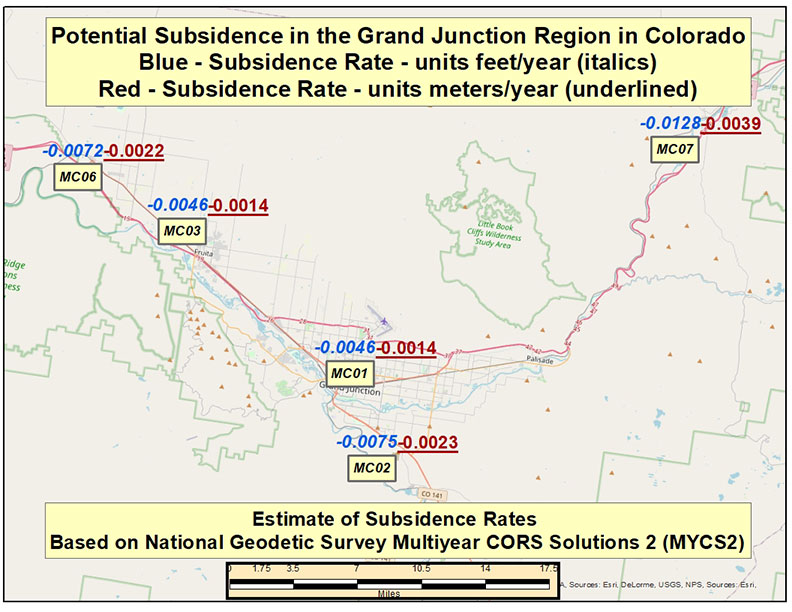
Continuing across the country to Colorado, the box titled “Potential Subsidence Rates in the Grand Junction Region, Colorado,” provides the estimate of subsidence rates in Mesa County, Colorado. As the plot indicates, the rates vary between -0.0046 feet/year (-1.4 mm/year) and -0.0128 feet/year (-3.9 mm/year). Once again, these rates all seem relatively small but many of the marks near CORS MC06 were last leveled in 1985. This means the potential change in height could be as large as 0.2592 feet (0.0792 meters).
Obviously, this is only an estimate of the subsidence in the region and the actual amount of subsidence is unknown since the last time the mark was leveled. These estimates are based on the MYCS2, which uses current data to estimate the velocity. The processing included data spanning 1996 to 2016 (week 0834 to 1933), 1099 weeks or about 21 years in total.
The point of this column is not to provide the exact change in height of a mark, but to highlight that the publicly available orthometric height on a NGS datasheet may not be up to date based on crustal movement. The new modernized National Spatial Reference System will enable users to determine an accurate, current height on a mark and be able to efficiently and effectively monitor changes in a mark’s height.
As stated in NGS’ announcement to suppress the heights in Southeast Texas, the agency has developed tools to assist users in submitted data to NGS. See the box titled “Excerpt from NGS Announcement to Suppresses Height Information for Southeast Texas.”
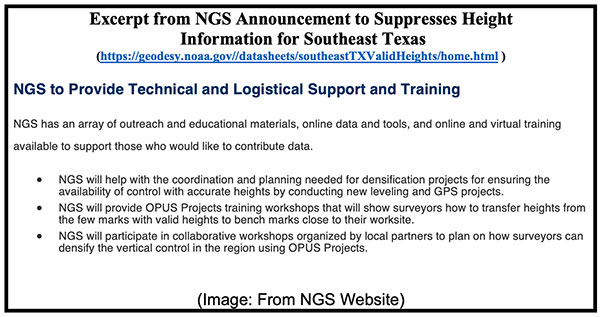
This assistance is for every user, not just for individuals performing surveys in Southeast Texas. NGS has Regional Geodetic Advisors throughout the United States.
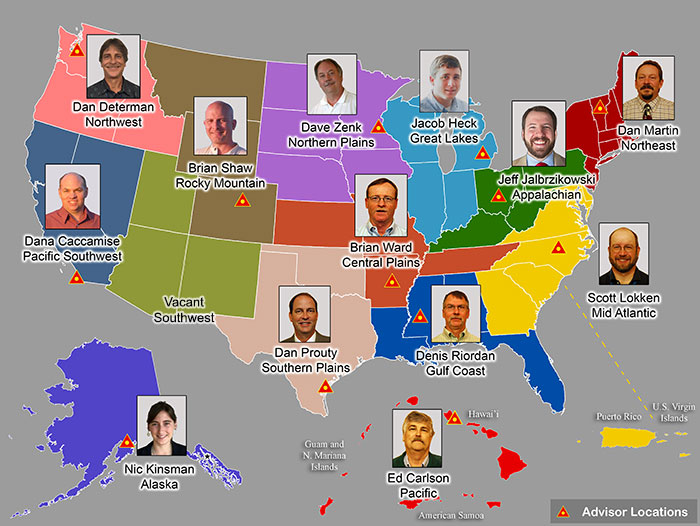
The Regional Geodetic Advisors provide guidance and assistance to constituents within their region. They are subject-matter experts in geodesy and regional geodetic issues. These individuals can assist users that are planning GNSS campaigns to re-densify the network.
NGS also provides a website detailing how users can help densify the network to prepare for the new, modernized North American-Pacific Geopotential Datum of 2022 (NAPGD2022). See the box titled “NGS GPS on Bench Marks Webpage.”
As mentioned in previous newsletters, a benefit of the new modernized National Spatial Reference System (NSRS) will facilitate the establishment of consistent, accurate NAPGD2022 GNSS-derived orthometric heights.
This column provided details on the suppression of heights in the Southeast Texas region, and potential effects of crustal movement on published heights in other regions of the United States. NGS suppressed the heights in the Southeast Texas region because of the large amount of crustal movement since the last time the heights of the marks were established.
As indicated by NGS’ MYCS2 velocities, every mark could be affected by crustal movement. In my opinion, the question a user should be asking is “How much has the height of the mark changed since it was last determined? Not, “Has the height of the mark changed?”