UAV Navigation has launched the VECTOR-400, a compact autopilot designed specifically for unmanned aerial targets (UAT). It features a robust enclosure and a military-grade connector designed to withstand the harshest environments, in accordance with MIL-STD 810 and MIL-STD 461.
“We wanted to develop a solution specifically for manufacturers of aerial targets,” said Tobias Webster, managing director of UAV Navigation. “That is why it was important for the autopilot to have the features required by this kind of UAV, such as sea-skimming (extremely low-level flight) or the capability to navigate without a GNSS signal.”
Thanks to its physical and logical redundancy, the VECTOR-400 is able to continue a mission in case of individual sensor failure and even when subject to jamming, maintaining accurate estimations of attitude and position. It features advanced algorithms for stall prevention and the ability to carry out an efficient gliding maneuver in case of engine failure.
The VECTOR-400 uses an air data attitude and heading reference system (ADAHRS) and inertial navigation system (INS) developed by UAV Navigation, which provides high precision attitude information and which allows reliable navigation even under the most demanding circumstances.
The ADAHRS gives the VECTOR-400 the capability to operate in GNSS-denied environments (less than 30 m/min drift) and also to execute highly dynamic maneuvers.
“The VECTOR-400 is not a product in isolation, rather it forms part of our global strategy. Some of its main features, such as the execution of completely automatic functions or its compact and easy to integrate software, which also allow it to be operated in case of data-link failure, are already used in other products in our autopilot family, such as the VECTOR-600” explained Webster.
In addition to its advanced technology, the VECTOR-400 benefits from the same stringent quality standards that UAV Navigation insists upon for all of its products. The company carries out rigorous calibration processes and acceptance testing on every single unit before it ships, together with its individual certificate of conformity.
UAV Navigation has designed the VECTOR-400 to meet MIL-STD 810 and MIL-STD 461 standards. The design and development of its software and hardware has been carried out in accordance with DO-178C, DO-254 and also ASTM F3201-16 — a certification available for unmanned aerial systems.
“Not all autopilots are able to control highly dynamic platforms; even fewer are able to carry out advanced, high-speed maneuvers and low-level flight such as sea-skimming,” Webster said. “That is why we are extremely pleased with this new product, which we believe meets a requirement in the market that had yet to be covered.”
There are many ways to navigate. For most applications, none surpass the accuracy, affordability and convenience of satellite navigation.
However, given the threats to GNSS from spoofing and jamming, and the possibility that GNSS satellites could be destroyed accidentally by space debris or intentionally during a war, the search is on for alternative sources of positioning, navigation and timing (PNT) data.
Potential alternative PNT (APNT) approaches include computer vision, terrain contour matching (TERCOM, which was used to guide cruise missiles in the 1970s and 1980s), and using magnetic anomalies (MAGNAV).
Diverse animals — such as sea turtles, spiny lobsters, and birds — use magnetoreception for orientation and navigation. However, while animals likely perform wayfinding using the direction of the magnetic field, similarly to how humans use a compass, high-resolution maps used in conjunction with atomic instruments enable us to perform absolute positioning to tens of meters, explained Major Aaron Canciani.
Canciani, an assistant professor of electrical engineering at the Air Force Institute of Technology, has been designing algorithms for MAGNAV flight testing for several years.
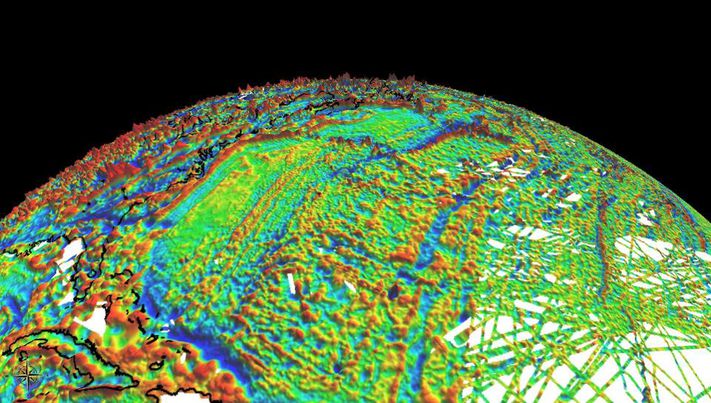
Earth’s crustal magnetic field varies from location to location as much as topographic features do and, like them, it changes very little over time. However, unlike topographic features, which only occur on the third of the planet’s surface covered by land, magnetic variations also occur on the oceans. This makes them potentially very useful as landmarks to the Navy and Air Force. Magnetic variations have the additional benefit that they cannot be jammed or spoofed.
NOAA’s EMAG2 World Digital Magnetic Anomaly Map. (Image: NOAA National Geophysical Data Center)
Just like other features of Earth, magnetic fields can be mapped, using scalar magnetometer sensors to measure their strength and direction. In fact, government agencies and mining companies have been making these maps for many decades, for geological exploration and other purposes, though mostly on land.
Conversely, these maps can be used to navigate by comparing the data from magnetometers to the map, just like cruise missiles used to use on-board radar altimeters to match the contours of the land beneath them to contour lines on a digital map and navigators on vessels in shallow waters compare the depths reported by their fathometers to those marked on a chart.
Before this approach to navigation can be widely implemented, however, magnetic maps need to greatly improve in coverage and quality. In addition to magnetic maps and sensors, MAGNAV also requires sophisticated algorithms and careful calibration, to do such things as subtract errors from space weather and the local magnetic field of the aircraft or ship.
The greater the platform’s speed, the greater MAGNAV’s accuracy, because the magnetometers can collect more varying magnetic information per unit of time of INS drift, Canciani explains. On a platform moving fast and at low altitudes, MAGNAV could achieve 10-meter accuracy. In less ideal conditions and relying on lower quality magnetic maps, the accuracy could be as low as one kilometer — which is sufficient for many missions, such as navigating ships at sea.
Off-the-shelf scalar magnetometers about the size of a quarter have already been flight tested. Corporations, the military and civilian government agencies such as NOAA, NASA and NGA already have suitable magnetic maps, though they need to be improved and expanded, particularly at sea. This would require gathering new data using calibrated sensors on airplanes, ships and submarines.
Could magnetic sensors be installed on thousands of aircraft, land vehicles and sea vessels to collect magnetic data during their routine operations? “With proper calibration, yes, but it should not be downplayed how difficult it is to get 1 nanoTesla measurements on a platform,” Canciani said. “Mapping and navigation are inverse problems so any platform that has been calibrated well enough to navigate could, in turn, also be used for mapping.”
However, he points out, the task is much more complicated than just putting a magnetometer on a platform. “Getting clean data on complex platforms remains the largest challenge for magnetic navigation,” Canciani said, “although we are making excellent progress with projects like the Air Force Accelerated AI program with MIT and Lincoln Lab. In this project we are using state of the art scientific machine learning approaches to calibrate complex magnetic fields on operational platforms. Without excellent calibration algorithms the only sure-fire way to get clean magnetic data is putting a sensor out on a boom or wing-tip, which might not be practical for all use cases.”
Two F-16 Fighting Falcons fly over Edwards AFB during a 2009 air show. (Photo: U.S. Air Force/Chad Bellay)
Canciani admits that MAGNAV is often met with skepticism but hopes that realistic testing on realistic platforms will lead to more interest and funding for this approach.
While some such testing has already been performed using private survey aircraft, a much more important test will take place in September, when F-16s from the Air Force Test Pilots School will fly MAGNAV sensors and software over a test range next to Edwards Air Force Base in Nevada.
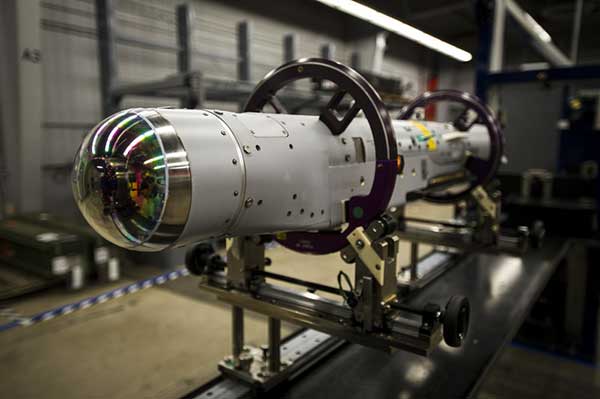
Raytheon Missiles & Defense, a Raytheon Technologies business, completed the first guided release of a StormBreaker smart weapon from an F/A-18E/F Super Hornet, which will become the second fighter jet to add the weapon when the program reaches initial operational capability later this year.
StormBreaker features a try-mode seeker that uses imaging infrared and millimeter wave radar in its normal mode. It can also deploy its semi-active laser or GPS guidance to hit targets.
During the U.S. Navy flight test, StormBreaker safely separated from the jet and successfully received guidance data from the plane, enabling it to be directed to its target while in flight, the company said.
“StormBreaker is the only weapon that enables pilots to hit moving targets during bad weather or if dust and smoke are in the area,” said Cristy Stagg, StormBreaker program director. “Super Hornet pilots will be able to use poor visibility to their advantage when StormBreaker integration is complete.”
GMV will take charge of the command and control and C4ISR interoperability system under the Integrated Modular Unmanned Ground System (iMUGS).
The European Commission’s European Defence Industrial Development Programme (EDIDP) has assigned 30.6 million euros to the iMUGS project for the development of an unmanned ground system. This makes it one of the European Commission’s biggest defense investments to date.
The Integrated Modular Unmanned Ground System (iMUGS) project will be carried out by a consortium primed by Milrem Robotics, with another 11 high-tech defense firms, including the technology multinational GMV.
The common development of this vehicle will build from Milrem Robotics’s previous program called THEMis, with the addition of various mission systems and autonomy solutions.
The aim is to develop a valid scalable architecture applicable to both manned and unmanned vehicles, with the idea of standardizing Europe’s ground and air systems and its command-and-control and communications systems, sensors, payloads and autonomy algorithms.
The system will consist of a robust and modular ground vehicle fitted with an electronic-warfare-resistant command, control and communications system and secure autonomous mobility software to allow the operator to control many different ground and air platforms securely and simultaneously.
iMUGS will include several components:
system cybersecurity
autonomous mobility
advanced communications systems and further driving-related developments
manned-unmanned teaming (MUT) including swarms.
iMUGS will enable European countries to use unmanned vehicles with logistics and ISR functions, trimming the load and increasing troop security.
With this joint initiative, the European Defence Fund meets member states’ requirements and draws on the skills of Europe’s industry to boost defense capabilities and strategic autonomy.
European Defence Industrial Development Programme (EDIDP)
The European Defence Industrial Development Programme (EDIDP) is the first initiative of the European Union’s 2019 and 2020 defense research window of capabilities. Announced on June 7, 2017, EDIDP can be considered the “preparatory action” of defense research to prove the feasibility of a joint defense-capability development and procurement program.
EDIDP’s aim is to drive the European Union’s strategic autonomy and cooperation between member states, making it possible for armed forces to carry out high level operations, with special attention to intelligence, secure communications and cybernetics.
Under the EDIDP 2019-2020 program, GMV is participating in the iMUGS, GEODE, ESC2 and PANDORA projects.
GMV‘s iMUGS role
GMV will be coordinator of the command and control and C4ISR interoperability subproject. GMV is bringing to the table experience in C2 ground systems and JISR (joint intelligence, surveillance and reconnaissance interoperability).
The overall aim is to develop the C2ISR tactical component for planning and carrying out joint manned and unmanned systems operations, using and distributing sensor data from the unmanned ground vehicle.
JISR interoperability synchronizes and integrates the planning and operation of all information-obtaining capacities with operation and processing capacities, sending on the resulting information to the assigned person at the right time in the right form and in direct support of present and future operations.
The Boxer Mechanised Infantry Vehicle (MIV) is used by many allied forces. (Photo: U.K. Ministry of Defence)
The C2 command and control subsystem will be fitted in a Boxer 8 x 8 vehicle for manned-unmanned teaming (MUT) coordination tests.
GMV’s participation in iMUGS is based on its experience in C2 ground systems, dismounted soldier C2 systems and JISR interoperability, areas where GMV is one of the leading companies in Europe. GMV is a supplier of Artillery and Dismounted Soldier Command and Control Systems for the Spanish MoD.
Since 2016 it has been responsible for maintenance and upgrading of the EUCCIS C2 system of the European External Action Service (EEAS).
SMC awards multiple rapid prototyping agreements for joint modernized GPS handheld device; four demonstrations to be held
The Defense Advanced GPS Receiver (DAGR) in use in 2011. (Photo: U.S. Army)
On June 26, the United States Space Force’s Space and Missile Systems Center awarded three separate rapid prototyping agreements to Collins Aerospace, Raytheon Intelligence & Space and the Technology Advancement Group for a total of $41.1 million.
The firm-fixed price agreements are for the development of a basic working prototype of the joint modernized GPS handheld device. The contract provides the government with innovative solutions demonstrated via hardware and software prototype development.
The purpose of this rapid prototyping effort is to produce a joint modernized handheld smaller in size with low power consumption, increased military-code capability, and improved anti-jamming and anti-spoofing capabilities compared to the equipment now used by the military.
4 demonstrations coming
This is the second competitive objective under the current Phase I strategy and is the result of a down-select from five to three vendors. It builds off the first objective of Phase I, which focused on mock-ups and drawings.
These agreements provide for four demonstrations to be held with Army and Marine Corps representatives. The demonstrations give the end users an early opportunity to provide feedback and the ability to influence the final design — ultimately making for a more seamless transition to operations.
“This is the first major update to the military’s GPS handheld device in more than 15 years,” said Col. Clifford Sulham, User Products Division chief. “The advanced capabilities of this device will allow our airmen, soldiers, sailors and Marines to conduct operations in GPS-challenged environments.”
Orolia, through its Orolia Government Systems business, has been selected by Raytheon Missiles & Defense to support the U.S. Lower Tier Air and Missile Defense Sensor (LTAMDS) radar program with its low SWaP (size, weight and power), rugged time and frequency system.
Defeating hypersonic weapons
An artist’s rendering of the Lower Tier Air and Missile Defense Sensor (LTAMDS), a next-generation radar meant to help defeat advanced threats like hypersonic weapons. (Image: Raytheon/Orolia)
The LTAMDS system — an advanced air and missile defense radar — will help the U.S. Army defeat advanced threats, including hypersonic weapons. It is a radar designed to defeat advanced and next-generation threats including hypersonic weapons, or those that fly faster than a mile a second.
LTAMDS has three antenna arrays — a primary array on the front, and two secondary arrays on the back. They work together, detecting and engaging multiple threats from any direction at the same time. This results in a battlefield without blind spots, according to Raytheon.
LTAMDS’ primary array is about the same size as the array for the Patriot Air and Missile Defense System, but it has more than twice the power. It is designed for the U.S. Army’s Integrated Air and Missile Defense system, but it will also preserve existing military customers’ investment in the Patriot system.
Raytheon Missiles & Defense was selected by the United States Army in October 2019 to provide the next-generation LTAMDS.
Timing from Orolia
Orolia was chosen for the LTAMDS program based on its core expertise in resilient timing and configurable ruggedized PNT systems for challenging environments, together with its proven track record of successfully delivering time and frequency platforms for other Raytheon Programs of Record.
Orolia was the first company to receive approval for a time and frequency reference system on the Defense Information Systems Agency (DISA) Department of Defense Information Network (DoDIN) Approved Products List for network interoperability, with its flagship SecureSync system.
“Ultra-precise mission timing and sync technology are fundamental building blocks for the Resilient PNT systems that warfighters rely on for continuous operations in contested environments,” said Hironori Sasaki, president of Orolia Defense & Security. “We are proud to be a Raytheon Missiles & Defense partner on LTAMDS and other programs that utilize GPS signals for timing, frequency and network synchronization across critical military systems.”
From critical timing solutions to GPS/GNSS simulation, interference detection, and mitigation, Orolia is an industry leader in end-to-end NAVWAR and Resilient PNT solutions to protect, augment and strengthen military systems for GPS-denied environments.
Orolia Defense & Security provides resilient PNT solutions and custom engineering services to U.S. government agencies, defense organizations, and their contractors, and is authorized to work on the full spectrum of U.S. government classified and unclassified projects.
Not surprisingly, the primary topic at the July 1 meeting of the National Space-based Positioning, Navigation and Timing Advisory Board was the Federal Communications Commission (FCC) decision on Ligado Networks.
In it Captain Sullenberger cited many of the issues the board’s vice chair, Brad Parkinson, discussed later in the meeting. Sullenberger’s statement is available here.
In his presentation, Parkinson called the FCC decision “a grave error.” He outlined his rationale in 21 information-packed slides.
Parkinson summarized his presentation up front with three points:
Repurposing the Mobile Satellite Services (MSS) radio spectrum is very high risk and brings virtually no near-term benefit to the United States.
The risks affect much more than the Department of Defense: high-value civil applications are also in jeopardy.
Any such repurposing should have been subject to a formal rulemaking process.
At the end of the presentation, the board voted unanimously to adopt the presentation, with slight modifications, as a reference document for posting on the board’s website.
The group had previously made strong recommendations to the Departments of Defense and Transportation to oppose any such action by the FCC. Both departments have done that and are continuing to do.
Hazardous information versus losing lock
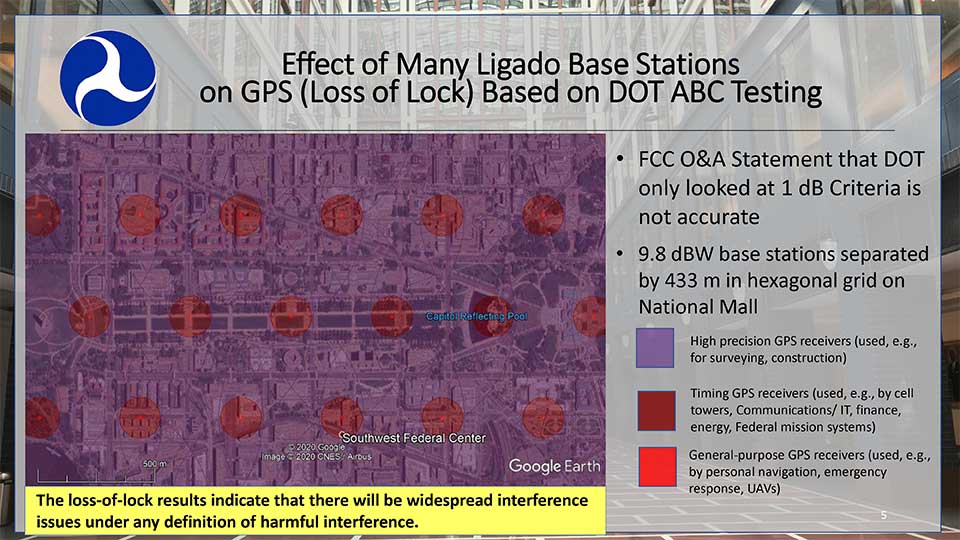
One slide in Parkinson’s presentation included a Department of Transportation (DoT) depiction how of Ligado transmissions would cause several types of receivers to “lose lock.” This graphic was used in a recent DoT presentation to the FCC.
DOT briefing to FCC: “Concerns Over Ligado Order & Authorization,” June 2020. (Slide: DOT)
Heretofore DoT has usually discussed the points at which Ligado transmissions would cause a 25% increase in the noise floor for receivers. This is an important metric as tests have shown that beyond that point many receiver types begin to give hazardously misleading information. DoT officials have used the example that the 1dB limit is like putting a load limit on vehicles crossing a bridge so that the bridge never reaches its breaking point. An important consideration with a safety-of-life application like GPS.
The National Space-Based PNT Advisory Board. (Board photo)
A receiver often gives inaccurate positioning and timing data, possibly hazardously misleading information, before it “loses lock” and stops providing any information at all. It is more difficult for a receiver to “acquire lock” than to track satellites and provide information, so equipment is rarely able to function again until it moves out of the area of interference.
When asked why DoT would bother to show such information to the FCC, one official suggested that loss of lock was more in line with the criteria the Commission used in making the Ligado decision. The hope was that, by showing that even this flawed standard had significant impacts which the FCC perhaps did not fully recognize, further technical discussions and reconsiderations could be realized.
Other Topics
While discussion of the FCC’s decision took the most time in the on-line meeting, several other issues were discussed as well.
Colonel Curtis Hernandez from the National Security Council briefly described development of a new space-based PNT policy to replace NSDP-39 which was put in place by President Bush in 2004.
He was not able to provide any specifics as it is a draft and still under consideration. Answering a question, he did say that the draft policy outlined the responsibilities of various departments, including for interference detection and monitoring.
Adam Balkcum from the Office of Science and Technology Policy discussed his office’s nascent efforts to investigate non-GNSS PNT as directed by the recent Executive Order on Responsible Use of PNT. The question of whether this includes possible PNT services from low earth orbit and geostationary satellites remains an open one.
Other presenters included:
Seth Jonas of the National Security Council staff on the recent Executive Order on Responsible Use of PNT,
Andrew Hansen of the Volpe Transportation Systems Center who spoke about efforts to monitor for GPS interference, especially in the post-FCC Ligado decision environment, and
NASA’s Chris Bonniksen discussed issues with operating and funding the agency’s Global Differential GPS system.
The agenda for the meeting and presentations are available here, as will be the meeting minutes once they have been finalized.
Third Lockheed Martin-Built GPS III satellite climbs to orbit on its own power
GPS III SV03 increases number of secure military code (M-code) enabled satellites in GPS constellation to 22 total.
After a successful launch on June 30, the third Lockheed Martin-built GPS III satellite headed to orbit under its own propulsion. The satellite separated from its rocket and used onboard power to climb to its operational orbit, approximately 12,550 miles above the Earth.
GPS III Space Vehicle 03 is responding to commands from U.S. Space Force and Lockheed Martin engineers in the Launch & Checkout Center at the company’s Denver facility. There, they declared rocket booster separation and satellite control about 90 minutes after the satellite’s June 30 launch aboard a SpaceX Falcon 9 rocket from Cape Canaveral Air Force Station, Florida.
“In the coming days, GPS III SV03’s onboard liquid apogee engines will continue to propel the satellite towards its operational orbit,” said Tonya Ladwig, Lockheed Martin’s acting vice president for Navigation Systems. “Once it arrives, we’ll send the satellite commands to deploy its solar arrays and antennas, and prepare the satellite for handover to Space Operations Command.”
After on-orbit testing, GPS III SV03 is expected to join the GPS constellation — including GPS III SV01 and SV02, which were declared operational in January and April — in providing positioning, navigation and timing signals for more than four billion military, civil and commercial users.
Lockheed Martin designed GPS III to help the Space Force modernize the GPS constellation with new technology and capabilities. The new GPS IIIs provide three times better accuracy and up to eight times improved anti-jamming capabilities over any previous GPS satellite. They also offer a new L1C civil signal, which is compatible with other international global navigation satellite systems, like Europe’s Galileo, to improve civilian user connectivity.
GPS III also continues the Space Force’s plan to field M-code, a more-secure, harder-to-jam and spoof GPS signal for our military forces. GPS III SV03 brings the number of M-code enabled satellites to 22 in the 31-satellite GPS constellation.
“As a nation, we use GPS signals every day — they time-stamp all our financial transactions, they make aviation safe, they make precision farming possible, and so much more,” added Ladwig. “GPS has become a critical part of our national infrastructure. In fact, the U.S. economic benefit of GPS is estimated to be over $300 billion per year and $1.4 trillion since its inception. Continued investment in modernizing GPS — updating technology, improving its capabilities — is well worth it.”
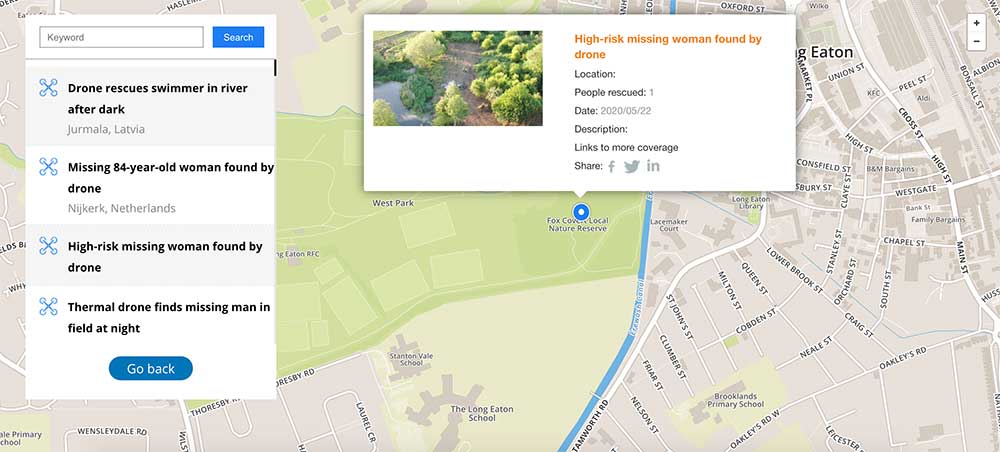
Global reference includes more than 400 people rescued by drones to date
DJI has launched an online reference to track events around the world when a drone helped rescue someone from peril. The Drone Rescue Map shows how more than 400 people around the world have been helped by drones in more than 200 emergencies, and will be continually updated as new rescues occur.
The DJI Drone Rescue Map has been compiled from news stories and social media posts from authoritative sources such as police departments, fire departments and volunteer rescue squads.
Each entry on the map includes the location and date of the incident, a brief description, a link to the original story or post, and an easy way to share those incidents online. To make the map as definitive as possible, DJI encourages public safety agencies to share additional drone rescues so they can be included.
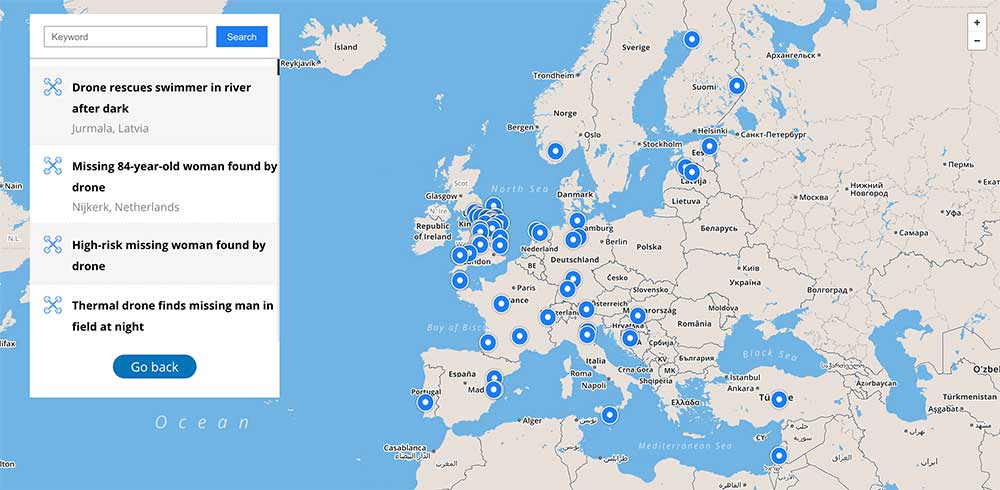
Once a week on average
The map includes rescues recorded in 27 countries across five continents, and shows how drone technology has moved from an experimental concept to standard public safety equipment.
The first drone rescue was recorded in Canada in 2013, the next one was more than a year later, and early examples of drone rescues were as likely to be performed by helpful bystanders as by professionals.
Today, drone rescues are reported about once a week on average, and public safety agencies routinely share those success stories on social media.
“The DJI Drone Rescue Map is now the best global reference for how effective drones are in emergencies, and allows the world to see the tremendous impact drones have had in finding lost people, shortening searches, reducing risks to rescuers and saving lives,” said Romeo Durscher, DJI senior director of public safety integration. “Public safety workers already know how drones are revolutionizing their work, and now the rest of the world can see their amazing stories in one place. The DJI Drone Rescue Map honors the incredible rescues they’ve made, and will allow everyone to see how drones help save people in the future.”
Types of rescues
The map includes instances of drones:
finding people lost in forests, fields and mountains, often in darkness using thermal imaging cameras
dropping life preservers to people struggling in water
locating boaters stranded on remote waterways
helping rescue people who were at risk of harming themselves.
The map does not include incidents when a drone is simply used as part of a larger search process; instead, a drone must have directly located, assisted or rescued a person in peril.
Many of these incidents illustrate how drones can find missing people more quickly than a traditional ground-based search, allowing victims to be brought to safety faster, more easily and with less risk and burden for their rescuers.
In some of the incidents on the DJI Drone Rescue Map, the drone helped accelerate a rescue and allow first responders to operate more efficiently.
In other incidents, the drone clearly made the difference between life and death.
Volunteer rescue
“I know how important drones are for people in distress, because a drone saved my life,” said Jason Mabee, a Maryland man who was injured and near death last year in a local park when he was found by a volunteer drone pilot. “My family and I are eternally grateful that a total stranger was able to use his drone to find me. It’s comforting to know that drones are helping so many other people around the world too, and I hope the DJI Drone Rescue Map demonstrates just why drones are so important in emergencies.”
“Drones have changed the game for finding and saving people lost in difficult conditions, and twice last year drones made the difference for us in finding and saving stranded hikers in dangerous terrain at night,” said Kyle Nordfors, Drone Team Coordinator for Weber County Search and Rescue in Utah. “Drones helped make these rescues possible while reducing risk and strain on our volunteer rescue force. We’re excited to see our successful efforts represented on the DJI Drone Rescue Map, and we hope it shows people all over the world how important drones are for saving lives and protecting the rescuers.”
DJI has previously released two detailed reports on how drones have been used to rescue people from peril around the world. The first, in 2017, counted 59 people rescued by drones, and the second saw the global total rise to 124 by 2018.
PC Tom Shainberg, senior drone pilot of the Alliance Drone Team for the Devon & Cornwall and Dorset police forces in England, said, “The Alliance Drone Team is proud to be a leader in adapting drone technology for police incidents, and we’re glad to see our successful drone rescues — such as finding a vulnerable man huddled near the edge of a cliff — being shared wider, along with similar accomplishments from other public safety agencies from around the world via the Drone Rescue Map.”
“Hundreds of examples now make clear that making drones widely accessible, with low barriers to entry and subject to a progressive set of operational regulations, leads inevitably to saving more lives around the world,” said Brendan Schulman, DJI Vice President of Policy & Legal Affairs. “The DJI Drone Rescue Map is a powerful resource for policymakers to understand the impact drones have on protecting vulnerable people in their own communities, and the detrimental consequences of policies that would restrict or discourage the use of drones, or increase the cost of using them. Regions with less favorable operating rules for drones appear to have substantially fewer reports of drone rescues.”
Seeking submissions
DJI monitors global news coverage, drone-related social media, and other sources to find new examples of drone rescues, but understands that many similar incidents may not yet be recorded on the map.
Anyone who knows of a drone-involved rescue not included on the DJI Drone Rescue Map can submit it through a form at the bottom of the map page.
These submissions will be reviewed for publication on the map, so DJI asks anyone submitting information about a rescue to respect the privacy rights and expectations of the persons involved, and to not share any confidential or sensitive information about agency operations.
The F-110 frigate being developed for the Spanish Navy. (Artist’s concept: Spanish Ministry of Defense)
The technology multinational GMV has signed a contract with Spanish corporation Navantia to develop and supply its SENDA navigation system for the future F-110 frigates.
The F-110 frigates represent a technological leap forward in platform systems and its combat system, incorporating Industry 4.0 technologies to improve lifecycle-long system management.
The various F-110 systems call for a continuous, precise, and trustworthy positioning, speed and attitude source. With this purpose in mind, SENDA incorporates multi-constellation (GPS and Galileo) satellite navigation technology compatible with both civil and military signals, plus differential GNSS corrections. It combines its GNSS navigation data with data received from external sensors, such as inertial navigation systems (INS) and pitometer logs. It includes state-of-the-art algorithms to provide robust navigation in contested GNSS scenarios.
SENDA also includes a timing server that generates highly precise and stable timing signals, allowing the ship’s systems to synchronize with GPS time. SENDA guarantees timing-reference stability and negligible drift, even during prolonged periods of GPS downtime.
SENDA is a redundant system with two complete functional subsystems working in active-active configuration, together with redundant GNSS signal distribution. Both systems, monitored in real time, exchange information to provide the overall system with the best possible solution.
GMV has experience in aeronautics, land and naval sectors with platforms such as the Atlante tactical long-endurance UAV, the 8×8 Dragon ground vehicle and now the F-110 frigates.
GMV worked with the Spanish Ministry of Defense MoD to develop a system prototype during the F-110 definition phase. The future F-110 frigates will replace the current Santa María class frigates starting in 2026.
The U.S. military selected Orolia Defense and Security to supply multiple BroadSim advanced GPS simulator systems, a contract valued at $1.7 million (USD), in an effort to upgrade testing facilities and field test assets.
The BroadSim Advanced GNSS Simulator (Photo: Orolia)
These new simulator systems will enable better testing of widely deployed military GPS receivers, which are integrated into air and ground-based positioning, navigation and timing (PNT) systems.
BroadSim will be leveraged with Orolia’s Panacea test suite, which the U.S. military uses to conduct automated testing and analysis for PNT system performance and vulnerabilities.
BroadSim will bring versatility to the testing process by supporting diverse test methods and environments such as a laboratory setting, or an over-the-air (OTA) field test event.
BroadSim was selected based on its flexibility to support the ever-changing military tasks at hand, according to Orolia. It can be easily configured to support laboratory testing one day, and field testing the next with its four independent RF outputs, removable drives, and software-defined architecture.
“Equipping our actively deployed warfighters with state-of-the-art technology is of utmost importance and can mean the difference between mission success and failure. To help achieve that goal, Orolia’s GPS testing and simulation solutions ensure that these systems are battlefield ready,” said Tyler Hohman, Orolia Defense and Security’s director of products.
Orolia will host a webinar on this topic on Thursday, July 16, at 2 p.m. EDT, titled “PNT Vulnerability Testing for Critical Infrastructure:Lessons Learned from Defense.”
The federal government considers PNT to be a critical aspect of mission success, as outlined in the C4ISRNET white paper “Protecting the U.S. Military PNT Advantage from GPS Jamming and Spoofing” and defined in the PNT Executive Order. For the 2021 federal fiscal year, the U.S. Army alone budgeted more than $275 million towards Assured PNT Research, Development, Test & Evaluation (RDT&E), as published in the 2021 Defense Budget.
Two F-16 Fighting Falcons fly over Edwards AFB during a 2009 air show. (Photo: U.S. Air Force/Chad Bellay)
The U.S. Air Force in September will begin testing on F-16’s an alternative position, navigation and timing (PNT) solution that uses the Earth’s magnetic anomalies.
The navigation technique, dubbed MAGNAV, is being researched at the Air Force Institute of Technology (AFIT), reports Forbes.
Air Force Major Aaron J. Canciani, an Assistant Professor of Electrical Engineering at AFIT, designed algorithms for MAGNAV flight testing on F-16s. Testing has already taken place using private survey aircraft.
MAGNAV sensors and software will be flown on Air Force Test Pilot School (AFTPS) F-16s over a special test range adjacent to Edwards Air Force Base in Nevada.
Magnetic anomaly navigation uses scalar magnetometer sensors that measure differences in the magnitude of magnetic fields when traveling past them. These variations can be compared with known features in magnetic field maps and be interpreted to determine position.
The four pillars of MAGNAV are magnetic maps, sensors, algorithms and calibration. The magnetic maps already exist within industry, the military and government agencies including NOAA, NASA, NGA and more.
NOAA’s EMAG2 (v3) World Digital Magnetic Anomaly Map. (Image: NOAA National Geophysical Data Center)