Founded in 2012, GeoSLAM is a provider of mobile scanning solutions with proprietary high-productivity simultaneous localization and mapping (SLAM) software to create 3D models for use in digital twin applications.
The addition of GeoSLAM is expected to significantly expand and accelerate Faro’s market growth in the mobile scanning space.
“We are thrilled to add GeoSLAM’s handheld 3D scanning technology to our portfolio of cutting-edge data capture solutions,” said Michael Burger, Faro president and CEO. “Faro now offers the industry’s broadest set of 4D data-capture solutions, including 360° camera-based images, mobile scanning and stationary high-accuracy laser scanning, allowing customers to balance the need for accuracy, speed and detail depending on their requirements. These capture technologies provide the foundation for our 4D digital-reality-based SaaS (software-as-a-service) offering that will allow customers to access multiple 4D data sources for visualization and analysis through a single user experience. We welcome the GeoSLAM team to our Faro family.”
“Joining with Faro represents the next step in the growth of GeoSLAM and the establishment of mobile mapping as a driver for growth in the way businesses map and understand their spaces,” said Andy Parr, GeoSLAM CEO. “Both companies share a vision of the importance of mobile scanning in the burgeoning digital reality capture market.”
GeoSLAM reported £14.5 million in revenue with 18% EBITDA in the fiscal year ending March 31, 2022. EBITDA, a non-GAAP measure, is calculated as net income/loss before interest (income) expense, net, income tax expense (benefit), foreign exchange rate variance, and depreciation and amortization. The transaction closed on Sept. 1, funded with available cash reserves and equity consideration.
Under terms of the agreement, GeoSLAM shareholders received a cash payment of £22.0 million and 495,562 shares of Faro stock subject to customary lock-up provisions. Faro expects the acquisition to be accretive to Non-GAAP EPS in 2023.
Faro serves the markets of architecture, engineering and construction (AEC); facility operations and maintenance; 3D metrology; and public safety analytics.
CEO Paul Gray displays the MK6 OBU (left) and RSU. (Photo: Cohda Wireless)
Cohda Wireless has developed an advanced and versatile V2X connectivity solution to help pave the way for the introduction of connected vehicles on smart roads and highways across the globe.
The MK6 RSU (roadside unit) and OBU (onboard unit) offer a comprehensive connectivity capability as standard features, including DSRC, C-V2X, LTE/5G and Wi-Fi/Bluetooth.
The Australian-headquartered company believes the MK6 will expedite the rollout of cooperative intelligent transport systems (C-ITS) around the world. Cohda’s V2X stack and applications are widely deployed in the industry, and the MK6 is the company’s most capable, versatile and powerful platform to date.
The dual concurrent technology capability of the MK6 gives users the reliability, flexibility and interoperability needed to embark on deployments with confidence, no matter where they are in the world, said Paul Gray, Cohda Wireless chief executive officer.
“More and more cities across the world are actively embarking on initiatives to introduce connected vehicles on their roads and we developed the MK6 with the intent that it would become the undisputed connectivity solution of choice,” Gray explained.“City transport authorities want to invest confidently in future-proof products, and when they equip their traffic lights and other roadside infrastructure with the MK6 Road-Side Unit, they are deploying a road-ready solution that can reduce congestion and road accidents.”
The MK6 also offers improved security and processing power for unique and complex applications, Gray said.
In developing the sixth-generation MK6, Cohda applied its experience and involvement in some of the world’s most prolific trials and deployments, including the 3,000-vehicle New York Connected Vehicle Project as well as Australia’s largest connected vehicle pilot, the Ipswich Connected Vehicle Project.
Cohda’s technology has featured in two production vehicle platforms, most recently in 2019 when Volkswagen equipped its Golf 8 production model with Cohda’s V2X. Volkswagen is the second manufacturer to incorporate Cohda’s V2X technology in a production vehicle in readiness for an impending connected road transport system.
“We are approaching a tipping point and we expect the MK6 to be a catalyst for increased momentum,” explained Gray.
“The MK6 is the all-rounder solution that makes it easy for the entire industry, especially cities and transport authorities, to participate in the evolution of the world’s transport systems,” Gray added.
The MK6 features the RoadLink SAF5400 and SXF1800 chipsets from NXP Semiconductors, as well as the Qualcomm Snapdragon Auto 5G Modem-RF Platform. It will be available in December.
From left: Yusuf Kıraç, Türk Telekom chief technology officer, and Net Insight CEO Crister Fritzson. (Photo: Türk Telekom)
Türk Telekom is using specialized GPS/GNSS-independent technology to provide critical time and frequency synchronization in its 5G network.
The technology — developed by Türk Telekom engineers with Net Insight — is expected to significantly reduce synchronization investment costs and increase service continuity in 5G. The companies did not reveal the details of their technology.
Türk Telekom, the pioneer of digital transformation in Türkiye, continues its efforts to shape the future with 5G and new generation technologies. Türk Telekom became the first operator in the world to implement the “Time Synchronization Transmission Solution,” implemented in cooperation with Net Insight, one of the world’s leading technology companies, on its network. This solution, which is the patented technology developed by Türk Telekom and Net Insight, will provide strategic superiority in network technologies.
Minimum end-to-end deviation throughout Turkey
The testing process of the GPS/GNSS-independent stable synchronization service for 5G has been successfully completed. Türk Telekom, which has installed the system at 20 locations in Turkey, will have a central synchronization network with high time accuracy, and will be able to offer synchronization service to 5G base stations.
While the highest time deviation value for 5G is 1,500 nanoseconds, the deviation value was measured at 5–45 nanoseconds in two different regions of Türkiye, according to the first data obtained from the Türk Telekom live network. The values revealed that sensitive time and synchronization information can be carried from Edirne to Hakkari, the entire length of Türkiye, with minimum deviation regardless of network equipment.
Solution to increase efficiency and save resources
“We became the first operator to implement the next-generation synchronization solution, developed together with Net Insight and leveraging patents of Turkish engineers, which is critical for 5G and beyond technologies on the live network,” said Yusuf Kıraç, Türk Telekom chief technology officer. “We see a significant potential in the global market for this innovative solution that will reduce costs and increase service continuity for mobile operators and all industries with critical time synchronization requirements.
“We can meet all these needs with this solution, which has a time deviation far below 1,500 nanosecond required for the synchronization need of 5G,” Kıraç continued. “We are proud to develop new satellite-independent solutions for operators and standardization organizations in the world.”
“We believe that this solution, which is operated on the Türk Telekom network for the first time in the world, will break new ground in 5G and have a high and significant market potential on a global scale,” said Net Insight CEO Crister Fritzson.
Important step for 5G and beyond
The new-generation time synchronization solution, which is not depending on GPS/GNSS satellites, offers unique advantages for transmitting phase and time synchronization over the network without the need to replace or update existing network equipment. With this technology, a fundamental solution to GPS/GNSS satellites’ signal interruptions and service losses — one of the biggest needs of operators who have switched to 5G — will be met, the companies said.
At the same time, the synchronization needs of 6G technologies — planned to begin global standardization studies in 2025 — will be met with the same solution.
The patented technology will be produced and marketed all over the world and will provide solutions for sectors such as telecommunications, energy and finance.
New Combined Program Office to enhance U.S. ability to prevail against threats in space, including new hypersonic weapons
Space Systems Command (SSC) is leading a new tri-agency Combined Program Office (CPO) comprised of representatives from SSC, the Space Development Agency (SDA) and the Missile Defense Agency (MDA). The CPO was established on Aug. 19 to enhance the United States’ ability to deter, defend and win against competitors’ challenges in space.
The Space Acquisition Council, established by Congress to manage space procurements across the Department of Defense, concurred on the CPO proposal, enabling the coordinated development and fielding of capabilities in the missile warning (MW), missile tracking (MT), and missile defense (MD) mission areas.
The CPO will address growing challenges resulting from the transition of space from a peaceful domain to one that is congested, contested and competitive. Other nations now challenge access to and movement in space, and have demonstrated the capability and intent to hold U.S. and allied space assets at risk.
“The MW/MT/MD mission is driving the U.S. Space Force’s new ‘requirements to execution’ roadmap, rapidly turning USSF Force Design into operational capabilities that will outpace and defeat very determined threats,” said U.S. Space Force Col. Brian Denaro, Space Sensing program executive officer and leader of the new CPO. “Our adversaries continue to develop missile technologies that are faster burning, dimmer and more maneuverable. This Combined Program Office, in partnership with SDA and MDA, will drive critical integration across a new resilient multilayer architecture that will warn, track and defeat these increasingly advanced and elusive missile threats.”
Establishing this partnership among MW/MT/MD acquisition organizations will enhance the interface between requirements, operators and users, optimizing delivery of integrated and resilient sensor-to-shooter capabilities for the United States and its allies.
“We are focused on delivering MW/MT/MD capabilities to the warfighter and the nation,” said U.S. Army Lt. Col. Alexander Rasmussen, Tranche 1 Tracking Layer program manager, SDA. “The Combined Program Office is a critical component in delivering this capability and enabling our nation to counter hypersonic and advanced missile threats. Together, SDA, MDA and SSC will ensure a synchronized end-to-end capability that sets the foundation for a continually evolving and advancing MW/MT/MD architecture.”
“With the emerging advanced threats, space-based sensors are essential to missile defense,” said Walter Chai, director for space sensors at MDA. “The close collaboration between SDA, SSC and MDA will ensure that we are able to defeat these threats.”
The CPO organizational structure integrates strategic decision-making across the interagency, establishing:
clear roles, responsibilities, and authorities for SSC, SDA, MDA and other mission partners
end-to-end system of systems accountability between requirements and weapon system delivery
development and management of standards (models, open architecture, data, etc.)
integration with operators, combatant commands and other weapon systems.
Space Systems Command is the U.S. Space Force field command responsible for rapidly identifying, prototyping and fielding resilient space capabilities for joint warfighters. SSC delivers sustainable joint space warfighting capabilities to defend the nation and its allies, while disrupting adversaries in the contested space domain. SSC mission areas include launch acquisition and operations; space domain awareness; positioning, navigation and timing; missile warning; satellite communication; and cross-mission ground, command and control, and data.
Light and with low power consumption, the NavGuard NOCTA Mini is a fully integrated day and night optical navigation module for jam-proof and spoof-proof operations
Photo: Asio Technologies
Asio Technologies has launched the NavGuard NOCTA Mini, a tiny jam-proof aerial optical positioning system for unmanned aerial systems (UAS).
NavGuard is a real-time optical navigation system that enables seamless and accurate autonomous GNSS-free navigation for tactical UAS platforms in areas where the GNSS signal is spoofed, jammed or unavailable. Using machine vision technology, artificial intelligence, advanced optics and sensor fusion, NavGuard can be installed on various unmanned aerial platforms to enable safe and sustainable 24/7 drone missions under complete GNSS blackout.
NavGuard’s new mini version, NOCTA Mini, is suitable for installation on small UAS. Lighter than other NavGuard systems and with low power consumption, it is a fully integrated day and night optical navigation module for jam-proof and spoof-proof operations.
NOCTA Mini enables UAS to operate beyond visual line of sight from takeoff to landing. Because it is based on machine vision, the system is drift-free. The self-contained system incorporates a computing module, geographic information system (GIS) infrastructure, and day and night cameras.
Designed for applications such as defense, homeland security and infrastructure security, it is a suitable solution for tactical UAS missions where payload capacity and flight time are limited, and continuous operation under all conditions is critical.
The Visual Navigation System improves navigation in GNSS-denied environments by means of visual odometry techniques
Photo: UAV Navigation
UAV Navigation has released its new Visual Navigation System (VNS), a new capability for manufacturers and end users of NATO Category I and II unmanned aerial systems (UAS).
The compact and lightweight device — provided as an optional peripheral to the main flight control system — enables the safe and efficient navigation of UAVs in GNSS-denied environments. The VNS combines visual odometry techniques and pattern identification with the rest of the sensors onboard the aircraft to ensure that the absolute position, orientation and relative movement of the aircraft over the ground is calculated with extremely high accuracy.
The planning and execution of UAV missions in environments in which the GNSS signal is either unavailable or unreliable is becoming more critical. For some missions, the datalink to the ground control station may be subject to interference, or the operation dictates that the flight must be performed without a datalink from the outset.
Under these circumstances, UAS traditionally rely on an inertial navigation system (INS) to complete the mission. However, all such inertial systems accumulate navigational drift due to sensor noise, propagation models and the difficulty in characterizing external forces. This positional error limits any such UAS operation because an accurate position cannot be guaranteed.
The new VNS, combined with the company’s Vector range of flight control systems, effectively addresses this problem by using data independent from GNSS and more accurate than INS. The system identifies patterns in the terrain below to assist in canceling out any accumulated error, allowing the UAS to operate for long periods without losing positional precision.
Because of its reduced size and weight, the VNS can be installed in Category I and II UAS, enabling them to take advantage of this navigation technique without penalizing autonomy or payload capacity.
The new VNS — developed entirely by the Spanish company UAV Navigation, part of the Oesía Group — has produced outstanding results during flight testing, both on fixed-wing platforms (typically with higher airspeeds and greater service ceilings) and rotary-wing platforms (where high vibrations and hover maneuvers are typically a problem). The new VNS has proved its ability to provide accurate navigation information for flights where there may be an intermittent loss of GNSS signal, and also when a flight must be executed from the outset without GNSS data.
Expanded Construction One Portfolio enables an end-to-end digital experience for heavy civil and infrastructure contractors to enhance productivity, profitability and sustainability
Trimble has acquired privately held B2W Software, a provider of estimating and operations solutions for the heavy civil construction industry. Financial terms were not disclosed.
With the passage of the U.S. Infrastructure Investment and Jobs Act (IIJA) and other infrastructure legislation across the globe, construction organizations are fast-tracking the digitization of their processes and operations. As infrastructure projects become increasingly complex, data-driven insights and analytics will be imperative to improve productivity, increase efficiency and drive sustainability.
“Seamlessly connected workflows are key to unlocking the true potential of an organization’s data,” said Elwyn McLachlan, vice president of Trimble’s Civil Solutions Division. “With the acquisition of B2W, Trimble will be able to provide an unparalleled end-to-end digital experience — connecting the digital to the physical — for heavy civil and infrastructure contractors.”
The addition of B2W’s comprehensive suite of pre-construction and operations capabilities will expand Trimble’s already extensive civil infrastructure portfolio and Trimble Construction One, a purpose-built connected construction management platform.
Photo: Trimble
B2W’s integrated suite of applications includes estimating, scheduling, field tracking, equipment maintenance, data capture and business intelligence. By combining these capabilities with Trimble’s field data, project management, finance and human capital management solutions, civil contractors will be able to bridge the gap between office and field in new ways, promoting transparency, efficiency and ultimately profitability.
“B2W has helped thousands of heavy civil contractors increase their bid accuracy and operational efficiency,” said Paul McKeon, B2W founder and CEO. “Now with Trimble, we can realize the next chapter of our story. By linking the planned with the executed, we will provide civil contractors with a truly connected construction experience, unlocking valuable new insights for our customers across their entire operation.”
B2W will be reported as part of the Buildings and Infrastructure segment.
Perkins Coie LLP acted as legal advisor to Trimble. Piper Sandler & Co. acted as a financial advisor and Foley Hoag LLP acted as legal advisor to B2W Software.
An interview with Fergus Noble, CTO at Swift Navigation about recent GNSS receiver innovations.
Noble
What was the most significant technical innovation in your GNSS receivers in the past five years?
At Swift Navigation, our mission has been to bring precise positioning technology to the mass market. We focus on the applications that touch our everyday lives — automotive, transportation, robotics and mobile devices. To realize that mission, we have had to innovate beyond traditional GNSS techniques. There are three areas where Swift has had to push the boundaries of GNSS technology: scalability, affordability and safety.
To meet the scalability needs of applications — such as automotive ones, which require continental-scale coverage for millions of devices — we have had to develop new techniques for providing GNSS corrections. We have developed new algorithms to precisely model the Earth’s atmosphere and other sources of GNSS error over wide areas in real-time and deliver them via scalable state-space representation (SSR) format.
To make the technology affordable, we have partnered with GNSS chipset providers to bring precise positioning performance to vehicles and consumer devices that was previously only achievable using expensive industrial receivers.
Swift brings to vehicles precise positioning that was previously only achievable with expensive industrial receivers. (Photo: metamorworks/iStock/Getty Images Plus/Getty Images)
To make the technology safe, we have developed the most sophisticated end-to-end positioning integrity system available today. This integrity provides our customers with the guarantee of safety needed for autonomous and industrial applications, as well as certifying to industry safety standards such as ISO-26262 (ASIL).
What has it enabled users to do that they could not do before?
Previous precise positioning solutions did not apply to applications such as autonomous driving as they were too costly to go into a vehicle, had the required accuracy only in limited coverage areas, and could not provide the guarantees of integrity such that they could be relied upon as a safety-critical sensor. The same limitations applied to last-mile transportation, consumer robotics — such as lawnmowers — and even mobile applications.
Swift’s technology enables our customers to unlock these use cases by providing reliable and seamless precise positioning to our users at continental scale.
What is a good example of this?
Swift’s technology is now powering one of the largest vehicle fleets on the road today equipped with advanced driver-assistance systems (ADAS). It improves vehicle positioning for an enhanced user experience when navigating, as well as to upgrade the ADAS functionality.
We also have customers using our technology to track and improve safety across a continent-wide rail network, provide precise position to improve the efficiency of last-mile delivery fleets, and a host of other applications across both emerging and traditional GNSS markets.
An interview with Rachel Wong, product manager, surveying and engineering division at CHC Navigation about recent GNSS receiver innovations.
Wong
What was the most significant technical innovation in your GNSS receivers in the past five years?
CHC Navigation is a technology enabler for geospatial professionals in more than 120 countries. End users of geospatial data increasingly come from diverse backgrounds. This forces us to invest heavily in simplifying data-acquisition processes by focusing on the user friendliness and positioning reliability of our GNSS receivers.
The latest technological developments in GNSS real-time kinematic (RTK) rovers are based on the maturity and improvement of satellite navigation systems, as well as on the integration of IMU sensors in the receivers — the latter being certainly the most important innovation.
In addition, the latest generation of our GNSS rovers, such as the CHCNAV i83, is based on the sophisticated iStar algorithm, which significantly improves the efficiency of tracking GNSS satellite signals for unmatched performance in GPS, GLONASS, BeiDou, Galileo and QZSS constellations, using all available frequencies including BeiDou 3. This goes hand-in-hand with the integration of the IMU as it helps to ensure increased GNSS positioning accuracy through optimized satellite geometry.
What has it enabled users to do that they could not do before?
A utility worker uses the tilt-pole-compensation feature to measure a manhole. (Photo: CHC Navigation)
The integration of GNSS+IMU modules allows surveyors to survey points without the need to level the range pole, accelerating the adoption of GNSS technologies for early adopters by simplifying work processes. For example, our i83 GNSS is powered by a 1,408-channel multiband GNSS receiver, the latest iStar technology and a high-end, calibration-free IMU sensor for faster, more reliable GNSS field surveys.
The i83 GNSS’ integrated IMU automatically compensates for pole tilt, increasing surveying, engineering and mapping efficiency by 30% over conventional RTK GNSS surveying methods. In less than 5 seconds, the 200-Hz inertial module is initialized to ensure survey-grade accuracy over a pole-tilt range of up to 30 degrees that meets the real-world operational needs of our users.
What is a good example of this?
Surveyors can extend their working boundaries near trees, walls and buildings without the need for a total station or offset measuring tools. This can be illustrated in sewer and drainage applications, such as measuring the bottom of manholes for water, utilities or sewers, which was barely feasible in terms of GNSS measurement before the advent of hybrid GNSS + IMU positioning.
Operators only need to concentrate on their tasks and no longer need to level their pole vertically. They are now able to perform many measurements without compromising accuracy and reliability. Productivity is greatly increased, RTK usability is greatly improved, and potential human error is reduced, whether you are an engineer, foreman or surveyor, and whether you are an experienced or new user.
According to Fact.MR, a market research and competitive intelligence provider, the global surveying and mapping services market was worth US$9 billion in 2021 and is expected to expand at a CAGR of 3% during the forecast years of 2022-2032.
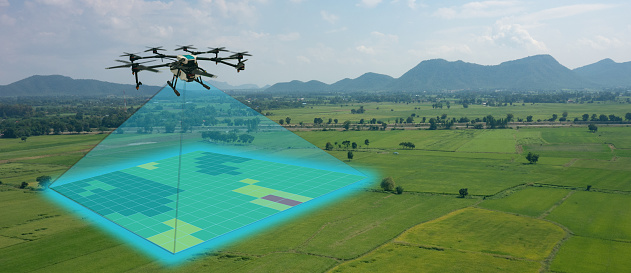
The survey and mapping industry has significantly benefited from drone technologies, because UAVs are less expensive and more accessible compared to traditional methods. Conventional surveying methods require rental aircraft and trained pilots, along with attached recording instruments — a costly and resource-intensive process. The introduction of UAVs has substantially created a future opportunity for surveying and mapping services to gather spatial information in a tighter structure. This also allows the collection of geospatial information with easy storage, processing and sharing capabilities.
For instance, in May 2022, India-based software company PDRL introduced a software-as-a-service platform — DroneNaksha — under the Svamitva Yojana scheme by the government of India for mapping land parcels using drone technology across the country. Similarly, in March 2022, Australia-based Emesent introduced Hovermap ST autonomous drone lidar mapping and surveying payload.
The integration of advanced technologies such as Wi-Fi, first-person view cameras, and GPS technology to make UAVs highly flexible and eliminate the need for a skilled pilot is expected to stimulate the demand for drones for survey and mapping activities, thereby driving market expansion.
Key Takeaways
The global surveying and mapping services market is projected to expand at a CAGR of 3.4% and reach US$13 billion by 2032.
Over the 2017-2021 historical period, the market evolved at 3.2% CAGR.
Forestry and agriculture account for a leading share in the market at a valuation of US$1.80 billion in 2021.
North America and East Asia account for leading shares in the global mapping services market at 24% and 32%, respectively.
Experts at u-blox discuss how they’re creating a hybrid positioning system for automated vehicles using GNSS and terrestrial radio ranging
By David Bartlett, senior principal engineer, Product Center Positioning, and Stefania Sesia, head of Application Marketing, Automotive, u-blox
There’s so much discussion around automated vehicles in the mainstream press these days, that it’s easy to forget some of the critical enabling technology needs to mature significantly before large numbers of people are being whisked from A to B by completely driverless cars.
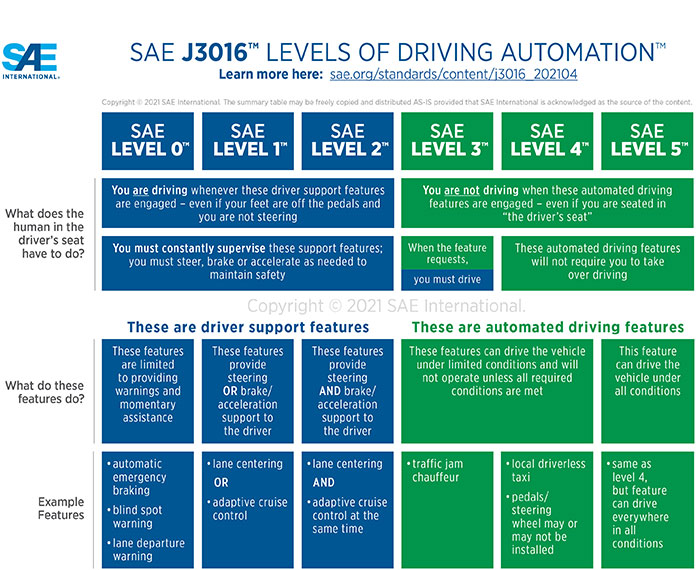
An area demanding particular attention is high-precision positioning. The Society of Automotive Engineers published a six-level automation scale. For vehicles at the higher end of the scale to become reality, they need to be able to reliably pinpoint their location to within centimeters, at all times.
Society of Automotive Engineers’ six-level automation scale. (Image: SAE International)
The positioning systems in most modern cars — which typically use GNSS receivers coupled with an inertial measurement unit (IMU) and the odometer — can’t get close to this level of accuracy. Even in the most favorable conditions for GNSS satellite signal reception, accuracy is between 2 and 5 meters horizontal circular error probable (CEP) without a correction service. In more challenging environments, such as urban areas or indoors, this is significantly reduced.
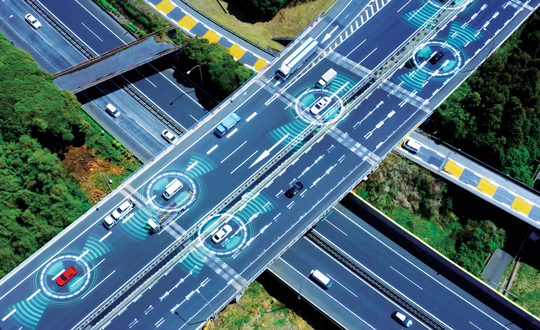
Using UWB and V2X to complement GNSS
Various solutions are being developed to address this GNSS shortcoming, but all currently have their limitations or don’t offer a solution that’s workable in all environments. Future autonomous vehicles will therefore invariably need to rely on hybrid solutions that blend multiple technologies.
One area where relatively little research has been done to date is in combining GNSS with terrestrial radio signals to enhance automotive positioning accuracy. Cellular vehicle-to-everything (C-V2X), IEEE 802.11p V2X, its successor 802.11bd and ultra-wideband (UWB) can all be used for short-range distance measurements. V2X ITS communications technology is listed as a potential positioning solution in EN 302890 (Intelligent Transport Systems), while UWB technology is gaining momentum for indoor applications, as well as by vehicle manufacturers for keyless entry.
These technologies are all ripe for further investigation as complements to GNSS and IMUs, to ultimately support higher levels of vehicle autonomy. U-blox recently ran a study to evaluate the terrestrial-ranging strengths and weaknesses of IEEE 802.11p V2X and UWB as part of a hybrid solution with GNSS for automotive navigation. Our aim was to establish their feasibility for this application, and identify where further research needs to happen for this type of hybrid navigation solution to become part of future autonomous vehicles.
A terrestrial-ranging system requires a network of fixed ground stations (typically referred to as roadside units, or RSUs, in V2X systems) at known locations. V2X or UWB signals sent out by the vehicle are returned by the RSUs, enabling the vehicle to measure the roundtrip time, and consequently calculate the distance between itself and the anchor point. Do this for three or more RSUs that are geometrically dispersed relative to the vehicle, and you can determine its position.
The need to simulate
Mass deployment of the RSUs required for this type of solution has not yet happened. Installing a suitable network of ground stations in an urban setting on public land wasn’t feasible for our research, in part because the regulatory landscape around UWB in this context is still evolving.
Instead, we set up anchor points around various private estates, from open fields to areas representative of urban environments, such as a business park. We took extensive measurements of the UWB and V2X signals’ behavior in these environments, which enabled us to extract performance statistics such as noise, and subsequently create a behavioral simulation model for the ranging performance.
Our test methodology
Having established our behavioral simulation model for different types of environments, rural, urban and indoor settings, we did a number of real-world test drives. These covered a wide range of driving conditions. We took in high-speed sections of open road, dense urban areas, start-stop congested traffic, numerous corners, and places with limited or no GNSS reception such as tunnels.
During these drives, we collected both GNSS measurements and ground truth. For the former, we used a u-blox NEO-M8L module with built-in IMU. To establish the ground truth, we used a high-grade real-time kinematic (RTK) receiver, GNSS augmentation data service and a high-spec IMU.
We classified each section of the test drives based on the environment — dense urban, tunnel, open countryside and so on — to enable us to apply the appropriate noise models in our simulation.
Next, we allocated RSU positions based on chosen density and placement rules, and added 2 m of random height variation, to ensure we avoided a fully planar deployment. We tested with various numbers of RSUs, to help understand how many would be required to achieve the necessary levels of location precision.
We then set additional simulator variables, such as the accuracy of the timestamp on the ranging measurements.
Having done all of this, we generated simulated ranging measurements between the RSUs and the truth position for every ranging epoch. To these, we added noise on a sample-by-sample basis, and merged the resulting noisy simulator measurements with the GNSS measurements we recorded en route.
Key findings
The output of the simulator enabled us to generate performance statistics that facilitated a comparison between the hybrid GNSS + V2X and GNSS + UWB solutions and a conventional GNSS + IMU solution, similar to those found in mainstream vehicles today.
The table below shows performance of the three solutions.
UWB
V2X (IEEE 802.11p)
GNSS+IMU
Ranging update rate
0.67 Hz
(1.5 s interval)
10 Hz (0.1 s interval)
n/a
Horizontal accuracy
0.1 – 2.5 m (Hybrid)
1.1 – 4.2 m (Hybrid)
1.2 – 5.5 m
Height accuracy
0.4 – 5 m (Hybrid)
5 – 10 m (Hybrid)
2 – 7 m
Frequency of operation
6.5 GHz
5.9 GHz
n/a
Signal bandwidth
500 MHz
10 MHz
n/a
Performance of the three navigation solutions on test.
At a very high level, we found that the GNSS+V2X (IEEE 802.11p) system achieved performance similar to a conventional GNSS+IMU(DR) solution using standard positioning. In situations where there is no GNSS reception, or where this is seriously degraded, an IMU also loses its value, given its reliance on continual GNSS reception to remain aligned. Here, a V2X-based positioning solution would be of value for navigation guidance.
However, more work will need to be done, including into the role of the IMU in high-integrity, high-accuracy positioning, to achieve the levels of accuracy and integrity that autonomous applications require.
The GNSS + UWB hybrid system delivered significantly better performance, approaching the levels that can be achieved using an RTK-based GNSS augmentation service. Our test system ran at 0.67 Hz, and was able to deliver precision close to 10 cm, though we would expect future production systems to align with the more common 10-Hz refresh rate broadly used in V2X.
By pairing a 10-Hz UWB ranging system with a high-accuracy GNSS system using correction data, it should be possible to achieve 10 cm-level accuracy in most situations. GNSS with correction data is already proven to be capable of delivering this level of precision in open areas and motorways. A network of RSUs deployed in urban environments would enable UWB to complement high-accuracy GNSS in situations where satellite reception is challenging.
However, the limited range of UWB, coupled with current regulatory restrictions around outdoor use, limit its usefulness at the present time. That said, micro-navigation in indoor areas, such as parking garages, could be a good fit for this technology.
Other lessons learned
The research brought to light a number of other important findings. First, having even just two RSUs visible, in addition to GNSS, provided significant benefit in the hybrid solution.
Second, height variation in the RSUs is essential if the navigation system is to determine the vehicle’s height accurately, particularly with V2X technology. This will be particularly important when it comes to enabling vehicles to safely operate where there are different levels of road one above the other, such as at multi-level junctions.
Third, we were successfully able to build a hybrid filter to process the signals from the V2X, UWB and GNSS systems, and seamlessly handle the transition between areas with GNSS only (where there were no RSUs deployed) and terrestrial ranging only (such as tunnels).
Fourth, despite the promise it showed for this application, terrestrial ranging is far from immune to environmental effects and multipath. Even UWB would sometimes suffer from non-line-of-sight signal propagation.
Finally, accurate time alignment between the GNSS and terrestrial ranging measurements also emerged as a critical factor. Where we had initially anticipated that alignment to within a few milliseconds would be sufficient, in reality we found we needed to be below 100 microseconds.
What next?
This research has shown the potential of using terrestrial-radio ranging to complement the existing positioning technologies and services being deployed in vehicles today. That said, more needs to happen, not least on the regulatory front, for this technology to genuinely become one of the enablers of future autonomous vehicles.
Outdoor UWB use needs to be permitted for this application, for example, and there needs to be widespread deployment of UWB-capable RSUs. Moreover, when RSUs of any kind are being deployed, thought needs to be given to their possible use as positioning anchors, rather than simply as communication devices.
In addition, more spectrum and wider channels need to be allocated to V2X. And we need to see positioning primitives and signals incorporated into the V2X standards. (Positioning primitives allow a car to know in what direction it is headed — up/down/left/right — relative to a point of reference. It uses signals from the sensors to calculate these values.)
A related area that merits further investigation is the use of UWB ranging to protect vulnerable road users such as people walking, wheeling and cycling. With modern smartphones and cars both now including UWB technology, there are opportunities to use this to make autonomous vehicles more aware of the position of people in their surroundings.
If you’d like to find out more about the research, our methodology, or the results, we’d be delighted to discuss these with you. Please email [email protected] to get in touch.
Galileo Control Centre in Oberpfaffenhofen, Germany. (Photo: ESA)
News from the European Space Agency (ESA)
Europe’s Galileo satellite navigation system continues to evolve. For the first time, end-to-end testing of the Galileo system demonstrated signal acquisition of an improved version of the Public Regulated Service (PRS), the most secure and robust class of Galileo services.
The system test extended from the Galileo Security Monitoring Centre in Spain and the Galileo Control Centre in Germany to a Galileo satellite at ESA’s ESTEC technical heart in the Netherlands, which then broadcast in turn to a user receiver.
Galileo’s PRS is an encrypted navigation and timing service for governmental authorized users and sensitive applications intended to remain available even in scenarios where other Galileo services might be degraded or jammed.
An initial version of the PRS signal has been broadcast by the satellites up to now, but as of next year the signals will evolve into an enhanced version known as Full Operational Capability Public Regulated Service (FOC PRS), which has been defined in close collaboration with the European Commission, the European Union Agency for the Space Programme (EUSPA) and the EU Member States.
The system’s FOC PRS capability is being enabled by an expansion of the Galileo ground mission segment — important upgrades of the Galileo Security Monitoring Centres (GSMCs) in St. Germain-en-Laye, France, and Madrid, Spain. These two sites oversee PRS provision and monitor its performance.
This coming version of the security monitoring centers, set for the following year, is being developed by an industrial consortium led by Thales Alenia Space in France.
Meanwhile the progressive deployment of remote system infrastructure is taking place over the course of this year, readying Galileo sensor stations to receive the upgraded PRS signals.
Upgrade of Galileo Sensor Station on Norway’s remote Jan Mayen Island in the Arctic Ocean. (Photo: ESA)
“To qualify, the FOC PRS Signal in Space required a major Galileo end-to-end test, demonstrating the compatibility of the space segment with the ground and user segments, called the System Compatibility Test Campaign (SCTC),” explained Federico Di Marco, ESA SCTC test director. “This test involved all Galileo key players spread across Europe, requiring close cooperation between the teams and months of preparation.”
The SCTC was led by an ESA engineering team from the agency’s ESTEC technical center in Noordwijk, the Netherlands supported by the System Engineering Technical Assistance industrial team led by Thales Alenia Space in Italy and in close collaboration with the operations team supervised by EUSPA.
“The testing involved three centers across Europe: the GSMC in Madrid, the Galileo Control Centre in Oberpfaffenhofen, and ESTEC hosting an actual Galileo satellite plus FOC PRS user receivers,” added Edward Breeuwer, who is in charge of Galileo system qualification at ESA.
FOC PRS test receiver developed by Antwerp Space under ESA contract. (Photo: ESA)
The FOC PRS signal was generated at the GSMC, sent to the German control center, then uplinked to the Galileo satellite at ESTEC, where the satellites are tested for space in advance of launch. The Galileo satellite then broadcast the FOC PRS signal in turn, to be picked up by a pair of receivers also on site: one developed by Antwerp Space under ESA contract and the other developed by Leonardo as part of a national development undertaken by Italy’s Competent PRS Authority, charged with overseeing the country’s PRS use.
“This marks the first time we have integrated such a nationally developed receiver within a system test activity,” said Fabio Covello, who oversees system security for ESA. “Having achieved this for PRS makes us very proud. We are confident that this experience can pave the way for future fruitful collaborations between the Galileo Programme and EU Member States, in the frame of specific tests to guarantee compatibility between the ESA-developed system and nationally developed PRS receivers.”
This successful outcome sets the scene for the PRS qualification at ground segment and system level, followed by operational validation planned in coming months, culminating in the first FOC PRS Signal In Space operational broadcast, in the course of next year.
FOC PRS test receiver developed by Leonardo as part of a national development undertaken by Italy’s Competent PRS Authority, charged with overseeing the country’s PRS use. (Photo: ESA)