To create the world image, satellite imagery was processed to remove clouds and balance shades and tones, and then carefully stitched together to create a seamless map layer with beautiful colors. The input data is recent, from 2020 and 2021, and rendered as one tiled file with zoom levels 0-13 for use in web applications.
Crafted by a small Swiss/Czech team, it is a viable, up-to-date alternative to Google maps for software developers, without privacy issues. It is available including seamlessly merged, super-high resolution aerial images for selected countries. The imagery provides more detail when users zoom beyond the satellite data.
The map’s cloud-free satellite imagery is useful for real-estate websites, mobile apps, globes, games, virtual worlds, in airplane infotainment systems, and for TV news and weather. In addition, scientists and artists can download it for their own innovations and creations.
In all, 180 terabytes of imagery have been crunched to fit on a 512-gigabyte USB stick.
MapTiler has a history of collaborating with the European Space Agency (ESA) and its Copernicus Earth observation project, and has won two Copernicus Masters Awards. Working in ESA’s Business Incubation Center also boosted the company’s ability to adapt satellite imagery into useful data.
Guangzhou Asensing Technology Co. Ltd, which specializes in high-precision positioning technology for intelligent transportation, demonstrated HD-MapBox at the Consumer Electronics Show (CES), which took place Jan. 5-8 in Las Vegas.
HD-MapBox integrates high-precision map data based on high-precision positioning.
The device can achieve lane-level positioning and 1+ mile (2 km) predictive cruise control (PCC), providing a decision basis for advanced assisted driving to better meet the demanding positioning requirements of autonomous vehicles.
“As the premise for autonomous driving safety, high-precision positioning is of great importance for integrating positioning technology based on inertial measurement units (IMU), GNSS signals, visual perception systems and high-definition (HD) maps,” said Situ Chunhui, Asensing Technology CTO. “High-precision positioning is becoming the preferred choice due to higher positioning accuracy and improved redundancy as well as an enhanced passing rate under all scenarios.”
Under any driving scenario, autonomous vehicles must accurately interpret their own lane-level location information to better predict and prevent risks and make safe driving decisions. As a result, positioning is not only part of the autonomous driving process, but also the premise of autonomous driving.
However, any single positioning technology has its own limitations, especially in certain scenarios such as in tunnels and underground garages where the perception system may be adversely affected by changes in the amount of light and low GPS signal, thereby affecting driving safety.
Fusing data from a GNSS receiver, IMU, ADAS camera, vehicle dynamics and HD maps, the HD-MapBox can achieve a lateral error of less than 8 inches (0.2 meters) and a longitudinal error of less than 6.5 feet (2 meters) with a 95 percent confidence interval, providing an accurate reference for highway pilot (HWP) and automated valet parking (AVP). Even if both GNSS and lane line detection are not available, the HD-MapBox can still enable vehicles to keep in lane for at least a quarter mile (400 meters).
Trimble has opened its Call for Speakers for the Trimble Dimensions+ 2022 User Conference to be held November 7-9 at the Venetian Resort in Las Vegas.
The Dimensions+ User Conference will promote a variety of sessions highlighting groundbreaking technology that can be used to transform work and push for a sustainable future. Speakers will have the opportunity to share their industry experiences and insights with peers from around the globe. The conference will also provide an Offsite Experience where attendees can learn how professionals are using the latest technologies to create a safer, greener and more productive work environment.
Session topics will include autonomy; building design, construction and operation; civil engineering and infrastructure; forensics; forestry; local, state and federal government; land administration; mapping and GIS; marine construction; mobile mapping; monitoring; photogrammetry and remote sensing; scanning; surveying; utilities; sustainability and more.
Proposals for speakers will be accepted through March 31, 2022 and notifications of acceptance will be made in the following months. Proposals can be submitted here.
To register for the conference or learn about sponsorship opportunities, visit Trimble’s website.
It’s the beginning of 2022 and the new, modernized NSRS is only about three years away. Hopefully, everyone has been reading NGS’s blueprint documents updated during 2021, and participating in NGS’s webinar series. Together, they provide the latest information about the changes from the existing NSRS to the new NSRS.
My previous columns highlighted many aspects of the new geometric reference frame and geopotential datum. In this month’s column, I will highlight the time-dependent aspect of the modernized NSRS and why it is necessary for the new system.
As I stated before, NOAA’s National Geodetic Survey (NGS) is developing models and tools for users to be able to transform coordinates between the four national terrestrial reference frames and the International Terrestrial Reference Frame, the Geopotential Datum and the North American Vertical Datum of 1988 (NAVD 88), as well as estimate coordinates at epochs different from the survey observation epoch by accounting for movement.
What does NGS mean by estimate coordinates at epochs different from the survey epoch, and why is it necessary to account for movement for the new, modernized NSRS? This column will address these issues.
NGS’s January 2022 (Issue 27) edition of NSRS Modernization News announced a paper about the modernized NSRS and a change in name to the Intra-Frame Velocity Model (IFVM). See the box below. Users can sign up for these newsletters here, and can obtain access to previous newsletters here.
The Latest Issue of
NSRS Modernization News
Image from GovDelivery Communications Cloud on behalf of NOAA’s National Ocean Service.
The new paper was published in October 2021 and is titled “The Mathematical Relation between IFVM2022 as Expressed in ITRF2020 with IFVM2022 as Expressed in the Four Terrestrial Reference Frames of the Modernized NSRS with Dependence on EPP2022.” It can be downloaded here.
The paper describes the mathematical relationship between the Intra-Frame Velocity Model (IFVM2022) and the Euler Pole Parameters (EPP2022).
The NSRS Modernization News announcement states that the IFVM2022 name has been changed to the Intra-Frame Deformation Model (IFDM2022). The latest version of blueprint 1 and the October 2021 (NOS NGS 90) report were published before the name changes, so they refer to IFVM2022 instead of IFDM2022.
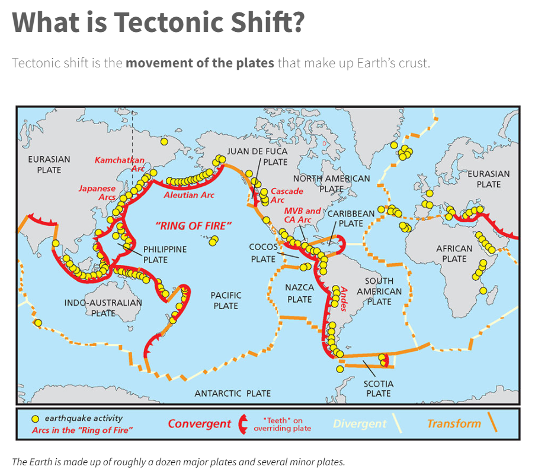
Why is it necessary to account for movement? Coordinates basically change because the Earth’s surface is moving due to the movement of major tectonic plates. See the box below for information about why it is called plate movement or tectonic shift. NGS understands this and is attempting to manage the changing coordinates by providing a time-dependent component.
Image: National Ocean Service websiteScreenshot: NOAA Website
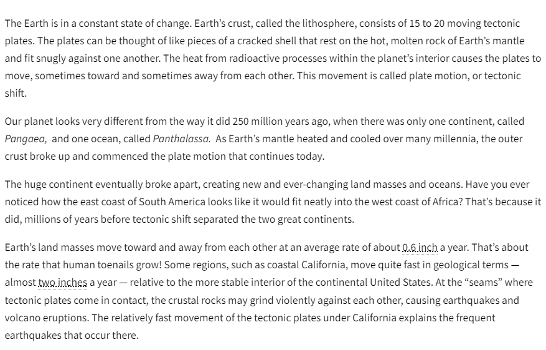
NGS will be defining the following four geometric terrestrial reference frames that are based on the tectonic plates (see map below):
North American Terrestrial Reference Frame of 2022 (NATRF2022)
Pacific Terrestrial Reference Frame of 2022 (PATRF2022)
Caribbean Terrestrial Reference Frame of 2022 (CATRF2022)
Mariana Terrestrial Reference Frame of 2022 (MATRF2022)
Four Tectonic Plates Part of NGS’s New NSRS
Image: Dave Zilkoski
As previously stated, NGS is developing models and tools for users to be able to transform coordinates between the four national frames and the International Terrestrial Reference Frame, as well as estimate coordinates at epochs different from the survey observation epoch by accounting for movement. These models are denoted as EPP2022 and IFDM2022.
So, what are EPP2022 and IFDM2022? And what does this mean to surveyors and mappers?
EPP stands for Euler pole parameters (a way of describing a plate’s rotation) and IFDM2022 is a way of computing the drift in coordinates.
Why Euler Pole? See the box titled “Who was Euler?”
Who was Euler?
Leonhard Euler was a Swiss who lived in the 1700s. He was one of the greatest mathematicians that ever lived and has been called the greatest mathematician of the 18th century. He founded the studies of graph theory and topology, and made pioneering and influential discoveries in many other branches of mathematics such as infinitesimal calculus. He introduced a lot of modern mathematical terminology and notation, including the notion of a mathematical function. He is also known for his work in mechanics, fluid dynamics, optics, astronomy and music theory.
The definition of Euler’s fixed point theorem states that any motion of a rigid body on the surface of a sphere may be represented as a rotation about an appropriately chosen rotation pole, called a Euler pole. This theorem has been used by geologists to understand and describe the motions of tectonic plates.
NGS’s 2021 revised Blueprint 1, NOAA Technical Report NOS NGS 62, Blueprint for the Modernized NSRS, Part 1: Geometric Coordinates and Terrestrial Reference Frames provides an explanation of Euler poles and “plate-fixed” frames. As stated in the “Who was Euler?” box, the definition of Euler’s fixed-point theorem states that any motion of a rigid body on the surface of a sphere may be represented as a rotation about an appropriately chosen rotation pole, called a Euler pole. The following is stated in the NOS NGS 62 report under “Plate-Fixed Frames and Euler Poles,” section 4:
When considering only the rigid (not deforming) part of a tectonic plate, the horizontal motion of the plate (relative to a global plate-independent reference frame, like the ITRF) can be modeled as a rotation about a geocentric axis passing through a fixed point on Earth’s surface. Although such models must make certain assumptions (such as the rigidity of the plate), the dominant motion of the majority of points on most tectonic plates is the rotation about a fixed point. That point is known as an “Euler pole.”
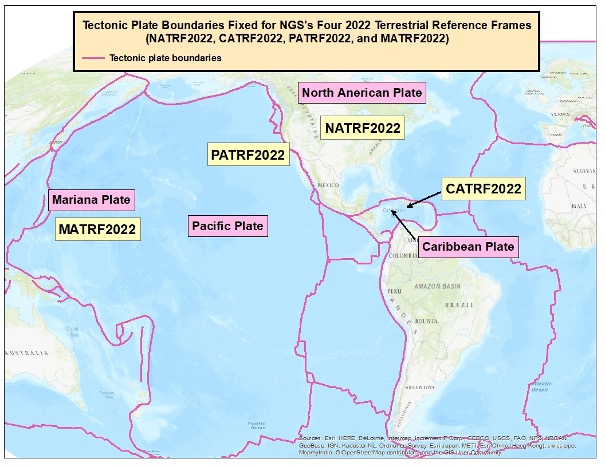
What is important to know is that the determination of a plate’s Euler pole location and the angular velocity with which the plate rotates can be empirically determined using GNSS observations from a CORS network distributed throughout the plate. Figure 1 from the NOS NGS 62 report provides a plot of the North American plate Euler pole and the vectors of the horizontal velocities at select CORS (see the box titled “Figure 1 from NOS NGS 62”).
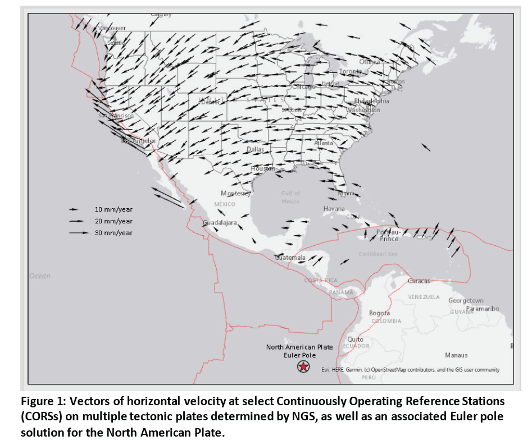
Every place on Earth is moving. That includes neighboring marks on the same tectonic plate. What this means is that after the Eulerian motions are removed, the remaining motions left over change the relative differences in coordinates of neighboring marks located on the same tectonic plate. Figures 2 and 3 from the NOS NGS 62 report provide plots of estimates of these remaining velocities (see the boxes titled “Figure 2 from NOS NGS 62” and “Figure 3 from NOS NGS 62.”)
Figure 2 is a plot of the non-Eulerian motions east of 110° west longitudes. As stated in the report, most of the velocities are less than 2 mm/year. The concept is that the EPP2022 and IVDM2022 models will remove the Eulerian and non-Eulerian movement of the marks.
Figure 2 from NOS NGS 62
Image: NGS website
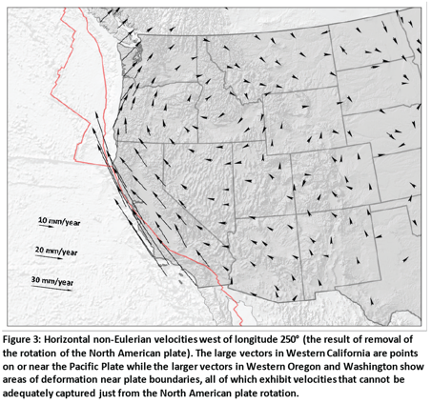
Figure 3 is a plot of non-Eulerian vectors west of 110° west longitude. As indicated in the plot, the large vectors in Western California, Western Oregon and Western Washington show areas of deformation near plate boundaries that don’t appear to be adequately captured just from the North American plate rotation.
Figure 3 from NOS NGS 62
Image: NGS website
It should be noted that the size of the vectors on Figures 2 and 3 depict a different magnitude of movement. Figure 2 depicts vectors at 1-3 mm/year and Figure 3 depicts movement at 10-30 mm/year.
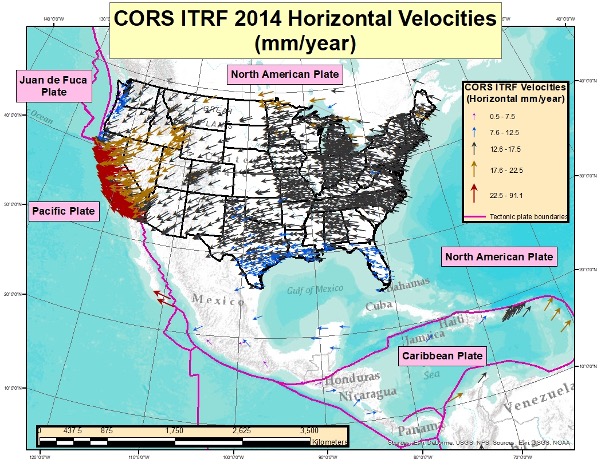
To better visualize the potential size of the movement, I downloaded the CORS ITRF2014 coordinates and velocities from NGS’s website and compiled the results. See the boxes titled “CORS ITRF 2014 Horizontal Velocities” and “Table of ITRF 2014 Horizontal and Upward Velocities of U.S. CORSs.”
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
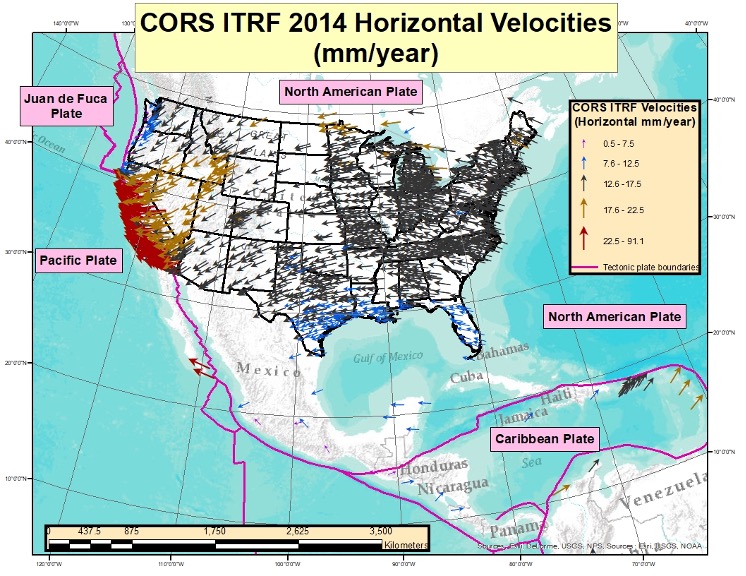
The box titled “CORS ITRF 2014 Horizontal Velocities” provides the horizontal vectors based on NGS’s file downloaded on Jan.13. Only CORSs designated as operational and computed velocities were included in the plot.
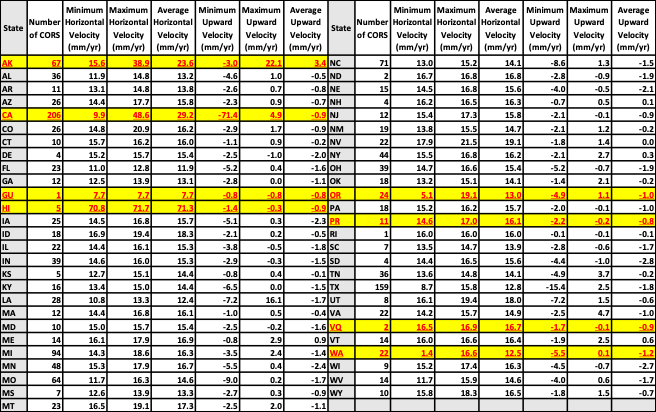
I have also created a table that includes a summary of the ITRF rates for CORS labeled as part of the United States. The table includes the following information for each State and Territory of the United States:
Number of CORS
Minimum Horizontal Velocity (mm/year)
Maximum Horizontal Velocity (mm/year)
Average Horizontal Velocity (mm/year)
Minimum Upward Velocity (mm/year
Maximum Upward Velocity (mm/year),
Average Upward Velocity (mm/year).
See the table below.
Table of ITRF 2014 Horizontal and Upward Velocities of U.S. CORSs
Computed Velocities Only (Downloaded Jan. 13, 2022)
Highlighted territories are not on the North American plate (GU, HI, PR, and VQ), and highlighted states are partly inside or close to the boundary of the North American plate and another tectonic plate (AK, CA, OR, WA).
The highlighted territories in the table are not on the North American plate (GU, HI, PR and VQ), and the highlighted states are partly inside or close to the boundary of the North American plate (CA, OR, WA). This is one of the reasons why their minimum and maximum horizontal velocity values are different from most of the other states’ values.
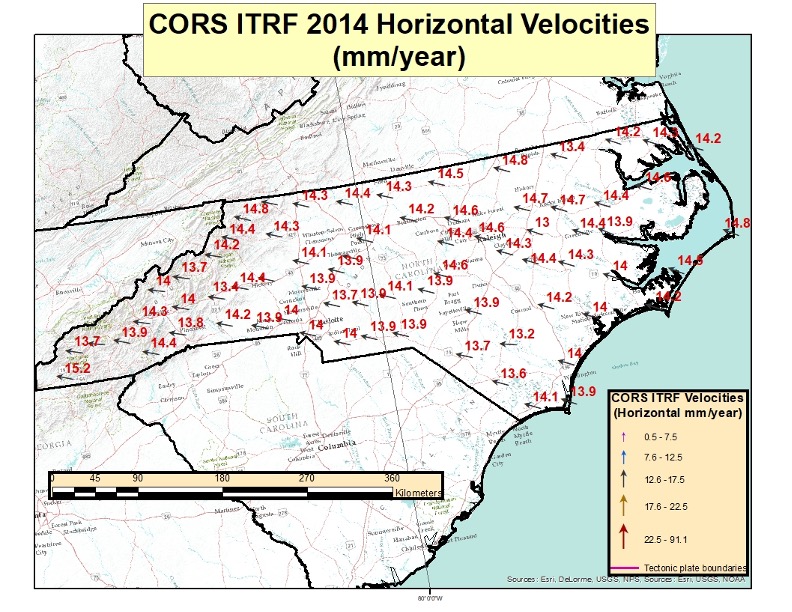
To visualize the relative differences in horizontal velocities between neighboring CORSs, I plotted the ITRF 2014 Horizontal Velocities for CORSs located in North Carolina (see the box titled “CORS ITRF 2014 Horizontal Velocities in North Carolina”). Looking at the figure, it’s obvious that all of the velocities are around 14 mm/year and moving in the same direction.
CORS ITRF 2014 Horizontal Velocities in North Carolina
Computed Velocities Only (Downloaded Jan. 13, 2022)
Screenshot: Dave Zilkoski
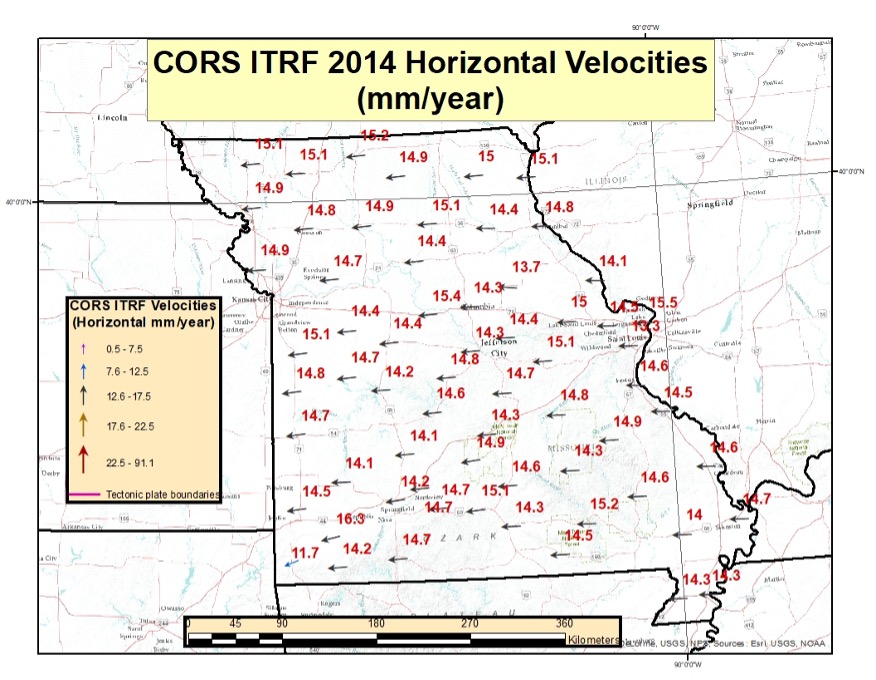
I plotted the horizontal velocities for Missouri to provide an example of the velocities in the central region of the conterminous United States. The magnitude of the velocities is similar to that for North Carolina, but the direction of the vector is slightly different. North Carolina’s average horizontal velocity is 14.1 mm/year and Missouri’s average horizontal velocity is 14.6 mm/year.
CORS ITRF 2014 Horizontal Velocities in Missouri
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
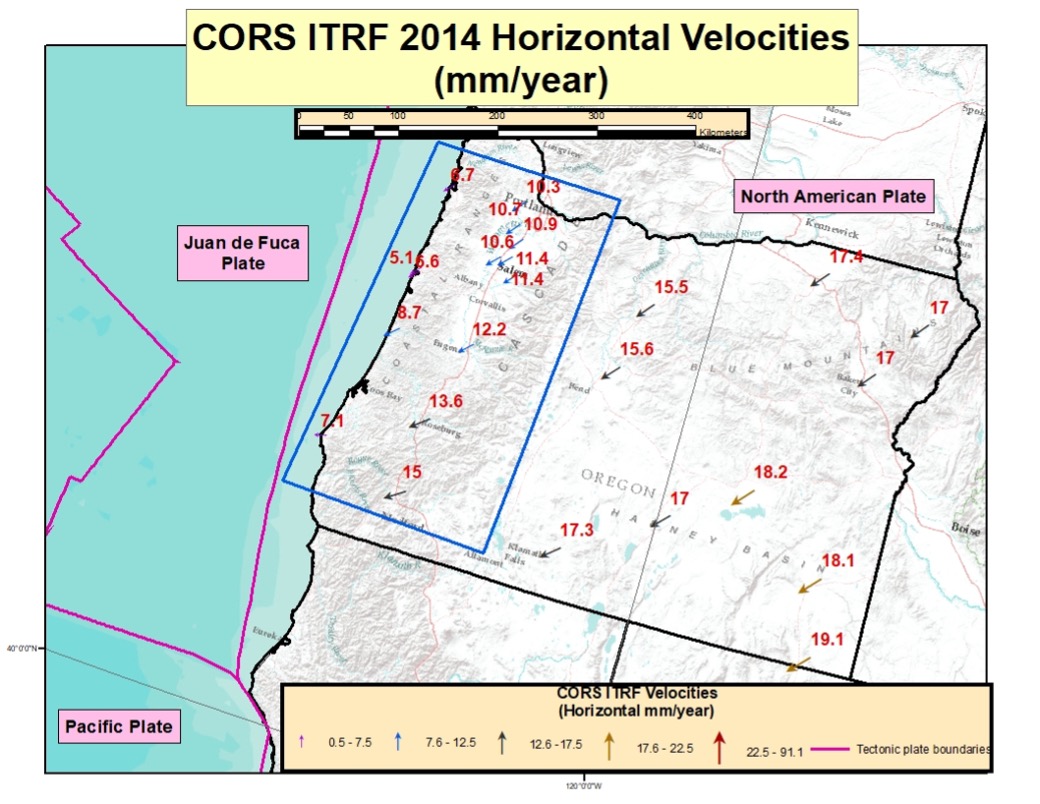
To emphasize the differences along the boundaries of the tectonic plates, I’ve included a plot of the CORS ITRF 2014 horizontal velocities for the State of Oregon and a plot of the states along the West Coast of the United States. See the boxes titled “CORS ITRF 2014 Horizontal Velocities in Oregon” and “CORS ITRF 2014 Horizontal Velocities Along West Coast of CONUS.” As indicated in the plot, there are significant changes in horizontal velocities near the Oregon coast. The values decreased by about 10 mm/year from the inland CORS to the CORS along the coast.
CORS ITRF 2014 Horizontal Velocities in Oregon
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
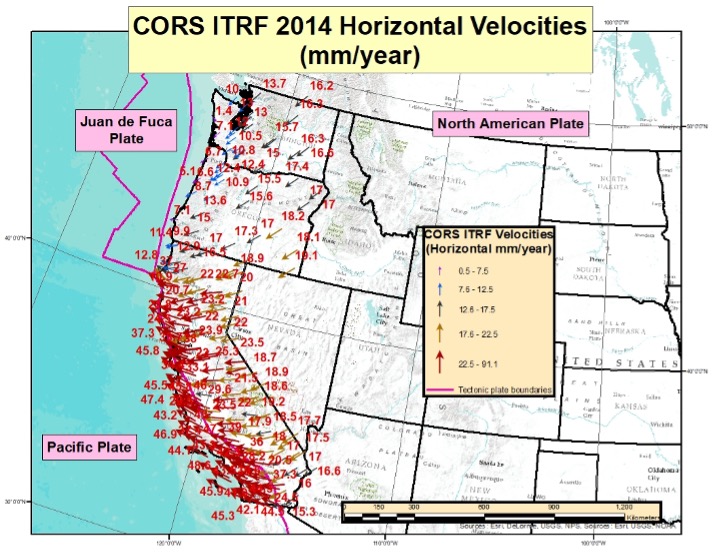
The plot of the CORS ITRF 2014 Horizontal Velocities Along West Coast of CONUS clearly indicates the change in magnitude the closer the CORS are to the Pacific and Juan de Fuca plates.
CORS ITRF 2014 Horizontal Velocities Along West Coast of CONUS
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
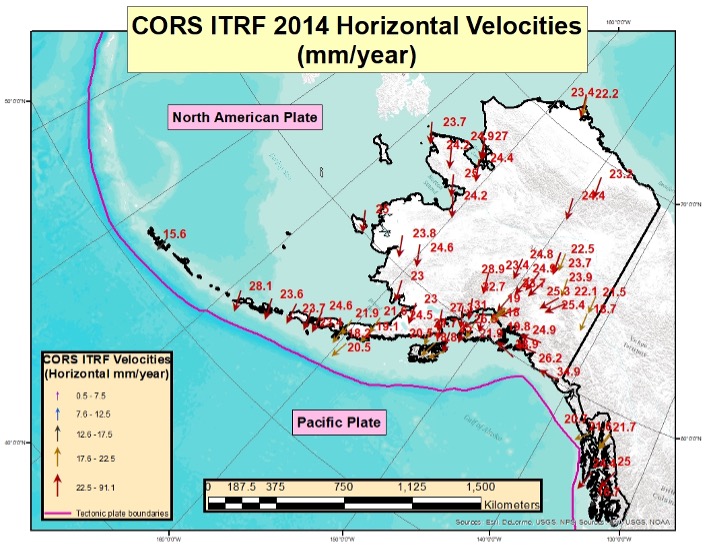
For completeness, I’ve also included a plot of the horizontal velocities for Alaska.
CORS ITRF 2014 Horizontal Velocities in Alaska
Computed Velocities Only (Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
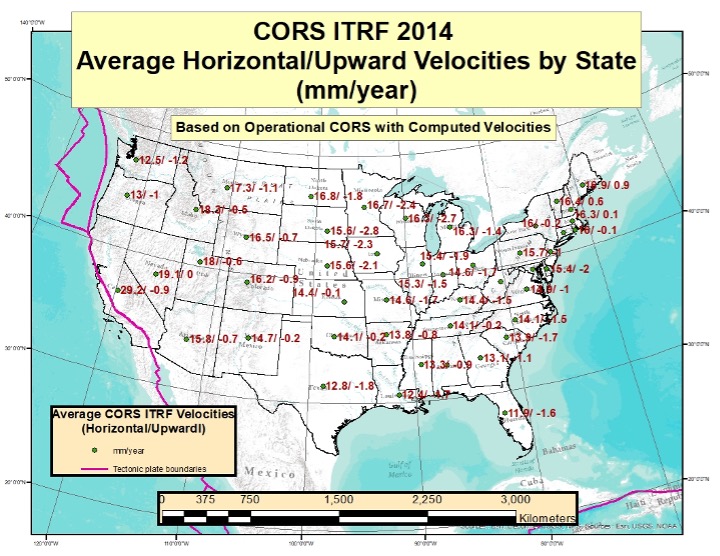
To better visualize the horizontal and upward velocities of CORS among states, I plotted the average horizontal and upward velocity value for each state based on that states’ CORS. See the box titled “Average Velocities by State.”
Average Velocities by State
Image: Dave Zilkoski
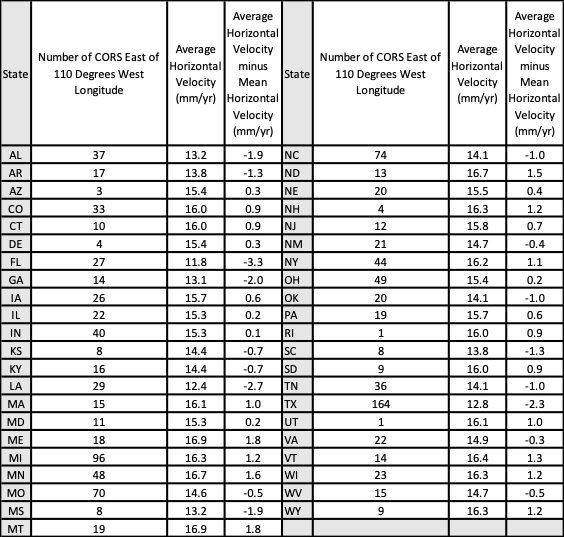
I also computed an average horizontal velocity value based on CONUS CORS east of 110° west longitude (denoted here as a regional horizontal velocity value). [I used the CORSs east of 110° west longitude to be consistent with NGS’s Figure 2 in NOS NGS 62.]
The box below summarizes the average horizontal motion for each state. The table provides:
The Number of CORS East of 110° West Longitude
Average Horizontal Velocity (mm/year)
Average Horizontal Velocity minus Regional Horizontal Velocity (mm/year).
This provides an estimate of the variation of the relative horizontal motion between States.
Table of ITRF 2014 Horizontal Velocities minus Regional Velocity of U.S. CORS East of 110° West Longitude
Table only includes CORS East of 110° West Longitude (Image: Dave Zilkoski)
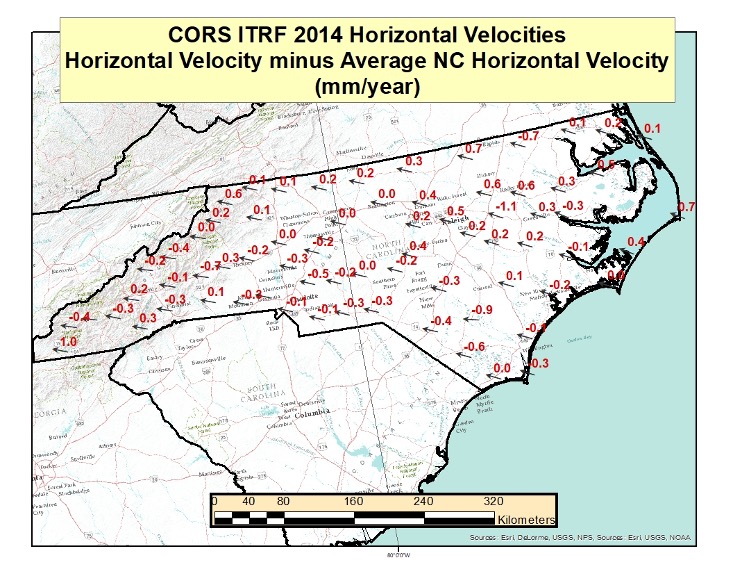
The box titled “Horizontal Velocities in NC Minus Average Velocity” depicts the resulting horizontal velocities with an average velocity removed (the average velocity was based on NC CORS only) for all CORS in North Carolina. As one can see from the plot, most of the resulting horizontal velocities are less than 1 mm/year, but they are still not zero. Once again, this is only meant to provide an idea of the size of the relative vectors between CORS in North Carolina.
As indicated in the NOS NGS 62 report, these horizontal velocities will be small, but they will not be zero. Hence the reason that NGS needs to provide models and tools for users to be able to transform coordinates between the four national frames (NATRF, PATRF, CATRF and MATRF) and the International Terrestrial Reference Frame (ITRF), as well as to estimate coordinates at epochs different from the survey observation epoch by accounting for movement within the reference frame. Surveyors in California have been dealing with these types of movements for many years now.
Horizontal Velocities in NC Minus Average Velocity
(Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
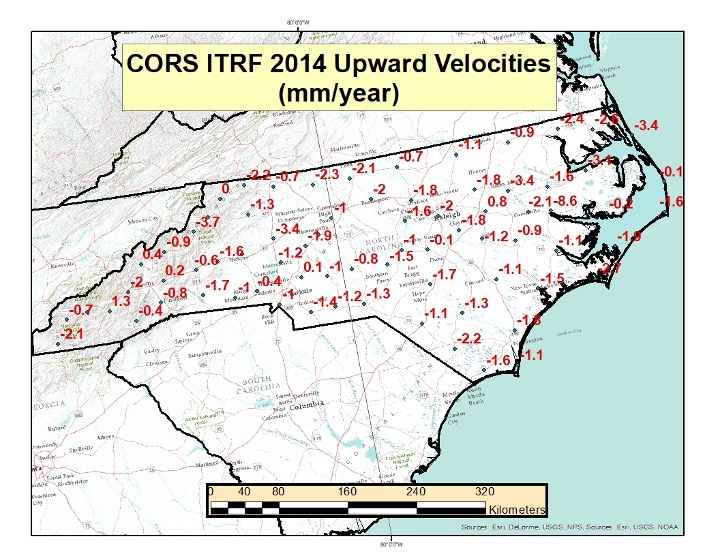
I plotted the ITRF 2014 upward velocity values of the CORS in North Carolina to depict an estimate of the vertical movement of the CORS in North Carolina. See the box below. The vertical velocities values are much less than the horizontal velocities, but they still are not zero. A future column will address the upward velocities based on the ITRF 2014 rates and crustal movement models.
CORS ITRF 2014 Upward Velocities in North Carolina
(Downloaded Jan. 13, 2022)
Image: Dave Zilkoski
This column explained why it is important to account for movement of marks everywhere and not just in areas influenced by active crustal movement due to earthquakes such as in Southern California. It provided information about the CORS rates of movement based on NGS’s ITRF2014 coordinates and velocity information. It highlighted NGS’s reports that describe models that will facilitate users transferring coordinates between reference frames and dealing with intra-frame movement between marks based on survey performed at different epochs. This is not just a horizontal positioning issue.
A future column will address estimates of vertical velocities in the new, modernized NSRS.
Rohde & Schwarz adds an extension to its R&S TS-LBS location-based services test system to meet 112 emergency-call regulations for smartphones
E112 emergency caller location tests are now available on the R&S TS-LBS test system. (Photo: Rohde & Schwarz)
A new regulation requires all smartphones sold in the European Union from March 2022 onwards to support caller location for 112 emergency calls. To ensure this feature, the devices must be compliant with several positioning systems as outlined by the European Commission.
In response, Rohde & Schwarz has added an extension to its R&S TS-LBS location-based services test system. Certification service provider CETECOM has already started E112 testing using these test sequences.
All smartphones sold in the European Union have to be compliant as of March 17 with the Delegated Regulation (EU) 2019/320. A supplement to Radio Equipment Directive (RED) 2014/53/EU, it defines that 112 emergency calls provide caller location information to emergency services in a fast and accurate way, to make sure first responders can arrive at the site of an accident quickly.
Instead of a harmonized standard, a guideline document from the European Commission recommends the testing procedures for Notified Bodies, who support the smartphone vendors in the conformance assessment procedure. Compliance with Galileo, advanced mobile location (AML) and Wi-Fi positioning will be mandatory.
The software-based extension to the R&S TS-LBS location-based services test system makes it a tailored solution in line with the European Commission’s guideline document and the upcoming ETSI standard TS 103 825 for AML protocol testing.
In the Rohde & Schwarz solution, the cellular network is emulated by the R&S CMW500 wideband radio communication tester, while the dual-frequency E1+E5 GNSS Galileo signal is generated by an R&S SMBV100B vector signal generator. Thanks to the automation software of the test setup, all the test cases described in the EC guideline can be executed automatically to ensure unified, fast and repeatable results.
Dubai-based Intelligent Quantum Labs (Intqlabs) has announced that its latest proprietary technology of enabling location data solely from the Earth’s geomagnetic strength is now patent pending (UAE patent office application 202111049994).
Leveraging more than two decades of experience in developing antennas, sensors, radio analysis platforms and computing algorithms, the new technology incorporates advanced processes to calculate power profile data from magnetic readings. The power profile enables calculation of a location under water, in the air or on the ground within a few seconds.
The technology, dubbed New Global Navigation Satellite System (NGNSS), was developed to serve as an alternative to existing GNSS platforms such as GPS, GLONASS, Galileo, Beidou, QZSS and IRNSS. NGNSS does not depend on satellite constellation and is not susceptible to being jammed, injected, replayed or spoofed.
NGNSS operates on the core principle that every point on Earth’s surface and in its atmosphere has a uniquely calculable magnetic strength reading, or a geomagnetic force. This force changes based on distance from the poles, elevation, altitude, time of day, direction of sunlight, magnetosphere, earthquakes, inner core rotation, crust, declination, inclination, ionosphere, magnetosphere, and gyrations that occur in continuity such as solar storms, elevation, topography, altitude changes, spherical variations and regional anomalies
NGNSS removes interference and noise from geomagnetic readings by using a specialized array of aligned multiple input multiple output (MIMO) antennas connected to a complex network of embedded processors, extremely sensitive fluxgate sensors and other sensors. The antenna and embedded setup processes the magnetic strength reading to obtain the power profile, split the various signals in a profile, and then calculate the direction, origin and location of these sources. This enables NGNSS to identify the true strength of the Earth’s geomagnetic field by removing all sources of interference.
NGNSS is a secure platform unaffected by jamming, replay or injection as it monitors power profiles and simply drops the malicious data. Furthermore, NGNSS is independent of the GNSS constellations, making it a standalone, secure and “always available” platform that can be integrated within any electronic terminal by strategically embedding a chip and antenna.
Nearmap Ltd. has appointed Penny Diamantakiou as chief financial officer (CFO) effective Jan. 31. The announcement follows the promotion of Andy Watt to chief growth and operations officer.
Diamantakiou has had a distinguished career spanning more than 20 years as a business executive with a passion for digital, media and technology businesses. Previously the CFO of 5B, a clean technology leader that accelerates access to low- cost, safely deployed, solar energy, Diamantakiou has also held leadership roles at companies including Optus, Yahoo7, WooliesX (part of the Woolworths Group) and the Association for Data-Driven Marketing & Advertising (ADMA).
Diamantakiou is a graduate of the Australian Institute of Company Directors, holds a master’s degree in business administration (an MBA), a graduate diploma in management, and a bachelor’s in economics. She is also a Fellow Certified Practicing Accountant (FCPA).
“It gives me great pleasure to welcome Penny to the team at Nearmap,” said CEO Rob Newman. “Penny will start from a strong foundation of fiscal management, reporting and transparency established by Andy, and will take our systems forward as we increasingly manage more products, customers and geographies.”
“Just as importantly, Penny shares our core values, and given her passion, commitment and extensive leadership experience working at high growth digital and technology-led businesses, is the right cultural fit to help drive our business and strategy forward,” Newman said. “I look forward to working together as we continue growing our business and expanding our market leadership position.”
How inertial systems and GNSS availability will help
By Kana Nagai, Matthew Spenko, Ron Henderson and Boris Pervan
Self-driving cars in urban environments can be problematic. The required multi-sensor automated systems will include GNSS, but buildings block and reflect GNSS signals, reducing system availability and accuracy. Researchers from the Illinois Institute of Technology report on how inertial navigation systems coupled with wheel-speed sensors and vehicle dynamic constraints can help.
Innovation Insights with Richard Langley
ARE WE THERE YET? This was a familiar refrain from the backseats of parents’ cars when traveling to a holiday destination or to grandparents when I was growing up. We didn’t have videos on a display attached to the seats in front of us or (who could imagine?) our own personal communication device on which we could call up games, movies or social media channels.
But I’m not talking about that complaint from our childhoods. I’m asking if we have arrived at the era of the self-driving car. The answer is yes and no. It all depends on what you mean by “self-driving.” We reviewed some of the technologies needed for self-driving or autonomous vehicles in this column in June 2019. And we indicated in the introduction to that column that vehicle autonomy has several levels. SAE International, formerly known as the Society of Automotive Engineers, has defined six levels of autonomy that can be briefly described as Level 0 – no automation; Level 1 – hands on/shared control; Level 2 – hands off; Level 3 – eyes off; Level 4 – mind off; and Level 5 – steering wheel optional.
Already, Level 1 automation is widely available in modern cars with adaptive cruise control, parking assistance, lane-keeping assistance and automatic emergency braking among the features being offered.
Level 2 automation, where the automated system takes full control of the vehicle’s acceleration, braking and steering, is available in some production models, although the “hands-off” designation is not to be taken literally — most motor vehicle laws require drivers to keep their hands on the steering wheel.
Between Level 2 and Level 3, we have conditional automation — the car can drive itself, but the driver must stay alert and be prepared to take over immediately.
Level 3 is high automation, where a computer fully drives the car at certain times on certain routes such as a highway; while the driver can perform other tasks such as reading a book, they must be prepared to take over operation of the vehicle within a few seconds if alerted by the automated system. While test campaigns are still ongoing, some jurisdictions permit Level 3 operation by ordinary drivers on some roads, and customers will soon be able to buy vehicles with this level of automation. Widespread use of
Level 4 and Level 5 automation is further off (some would say quite a way off) and remains in development. But famously, last year, Toyota operated Level 4 self-driving shuttle vehicles around the Tokyo 2020 Olympic Village.
A lot more work needs to be done before we will have arrived at the era of the fully self-driving car that will be able to travel on any road, anywhere in the world, all year around, in all weather conditions. In particular, self-driving cars in urban environments (as opposed to highway driving) can be problematic.
The required multi-sensor automated systems will include GNSS, but buildings block and reflect GNSS signals, reducing system availability and accuracy. In “Innovation” this month, researchers from the Illinois Institute of Technology report on how inertial navigation systems coupled with wheel-speed sensors and vehicle dynamic constraints can help.
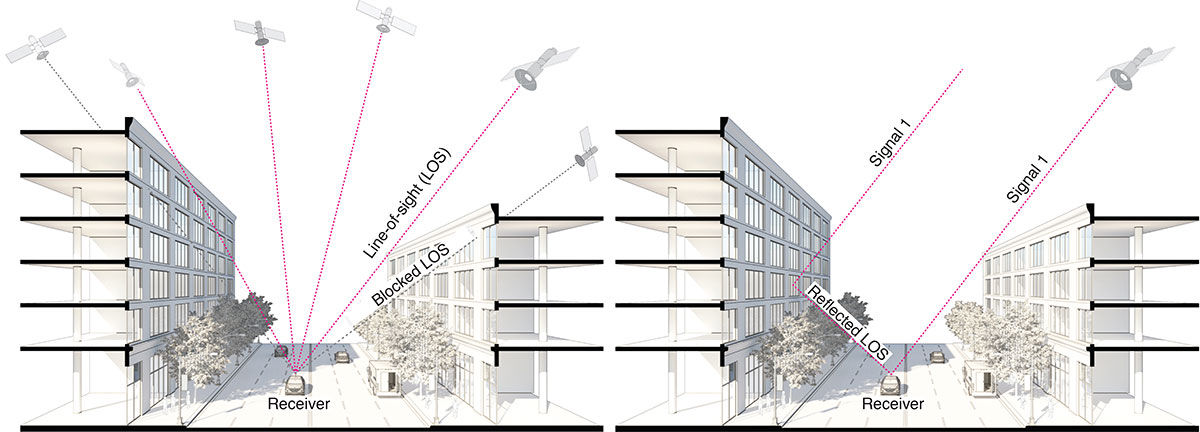
GNSS provides navigation services globally, but satellite visibility in urban areas is limited by high-rise buildings. This creates a mixture of GNSS available and denied environments (see FIGURE 1) — users do not generally know where the system can maintain sufficient levels of accuracy and integrity for a particular application. To begin to address the issue for self-driving cars, we evaluated GNSS-only availability in downtown Chicago.
FIGURE 1. The figure depicts three types of potential GNSS signal reception: direct LOS signals and blocked LOS signals (left) and reflected LOS signals (right). (Image: Authors)
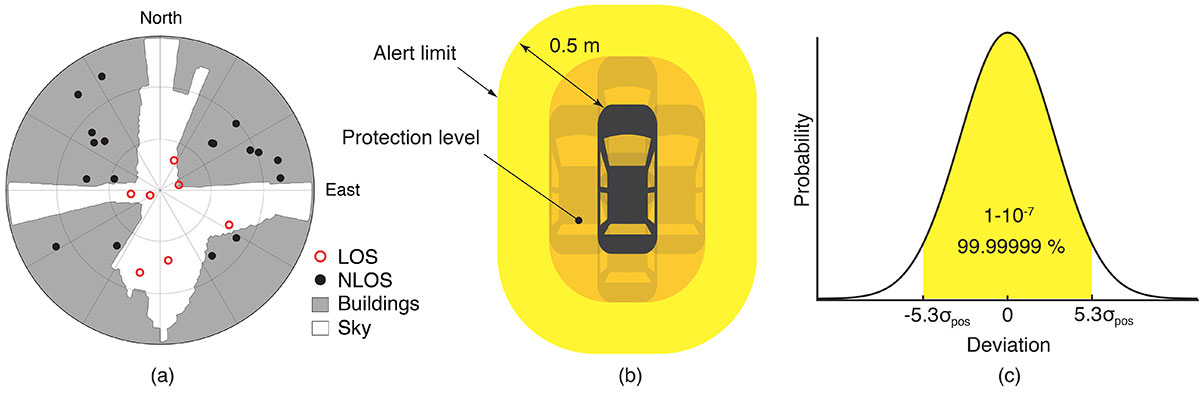
GNSS signal prediction in urban environments has been conducted in previous work. For example, the concept of “shadow matching” was developed to identify GNSS signal blockages in urban canyons. Overlaying sky plots on a hemispherical sky view can be used to distinguish between line-of-sight (LOS) and non-line-of-sight (NLOS) signals (see FIGURE 2a). Reflected rays can be predicted using Householder transformations to reveal potential multipath conditions. Satellites producing blocked or reflected (NLOS) signals should be excluded to maintain integrity.
FIGURE 2. (a) A hemispherical sky view in an urban environment. (b) Illustration of a protection level and an alert limit. To ensure integrity, the protection level must not exceed an alert limit. (c) The allowable probability of exceedance is assumed to be 10−7 in this work. (Image: Authors)
When the number of visible satellites is greater than three, GNSS can resolve vehicle position. However, even in cases where enough satellites are visible, the satellite geometries are generally weak because the dilution of precision (DOP) is adversely affected by the buildings partially blocking the sky. Horizontal positioning error must be bounded by a protection level computed by the vehicle. Then, for navigation to be deemed available, the protection level must not exceed a required alert limit (see FIGURE 2b). The maximum allowed probability of exceedance (see FIGURE 2c) and the alert limit can together be used to determine the maximum allowable position error standard deviation.
Even if the protection level is far below the alert limit in an open-sky environment, it will frequently exceed the alert limit once the vehicle enters a city. GNSS alone is generally not able to maintain availability, so integration with other sensors is needed. Tightly coupling inertial navigation systems (INS) with GNSS using the extended Kalman filter (EKF) provides better estimation in urban environments. The EKF algorithm also enables integration of wheel-speed sensors and vehicle dynamic constraints. These integrated navigation systems will improve availability, but it is still unclear how long such a system can be expected to maintain fault-free integrity in a congested city.
Focusing on the problem of self-driving cars in urban environments, we evaluate protection levels of navigation with practical integrated sensors: GNSS, INS, a wheel-speed sensor (WSS) and vehicle dynamic constraints (VDC). The goal is to develop the means by which we can determine locations where external ranging sources (such as lidar) are needed to maintain continuous navigation with fault-free integrity.
GNSS-ONLY AVAILABILITY
For GNSS availability evaluation, we assume an integrity requirement that the probability of exceeding a 0.5-meter alert limit must be lower than 10−7. The 0.5-meter alert limit therefore corresponds to approximately five times the position standard deviation, so the maximum allowable position error standard deviation is then approximately 0.1 meters. Accuracy at this level clearly requires differential GNSS carrier-phase measurements. We assume a nominal GNSS double difference (DD) carrier ranging error standard deviation of approximately 0.02 meters, and that carrier cycle ambiguities can be readily resolved in an open-sky environment prior to initiation of vehicle motion.
Given the assumptions made of the maximum allowable position error standard deviation and the GNSS ranging error standard deviation, the maximum allowable horizontal dilution of precision (HDOP) is about 5.
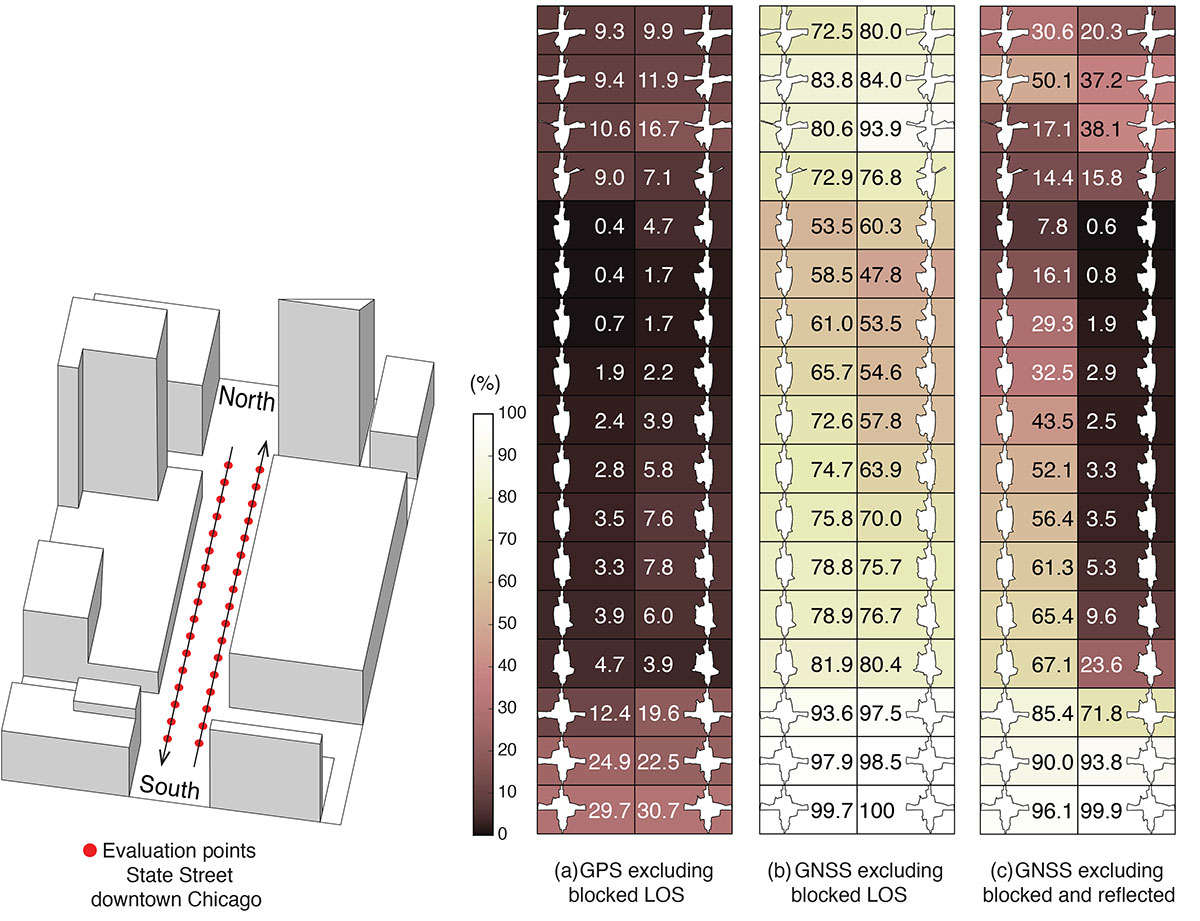
FIGURE 3 shows GPS and GNSS availability — the fraction of time the HDOP requirement is met over 24 hours — along a section of State Street in downtown Chicago. The availability results using GPS only and excluding only blocked LOS signals ranged from 0% to 9% along the block and 9% to 30% at the intersections (see FIGURE 3a). Using four full GNSS constellations (GPS, Galileo, GLONASS and BeiDou), availability ranged from 48% to 82% along the block and 72% to 100% at the intersections (see FIGURE 3b).
FIGURE 3. The percentage of GPS or GNSS availability in 3D-mapped downtown Chicago. We exclude satellites producing blocked LOS signals or both blocked and reflected LOS (NLOS) signals from the measurements. Each column expresses a lane of southbound or northbound travel. The availability is the percentage of total time when HDOP meets the self-driving car integrity requirements in 24 hours. (Image: Authors)
When we also excluded satellites producing reflected LOS signals that reach the vehicle, the availability dropped significantly at every point (see FIGURE 3c). We assert that FIGURE 3c expresses the reality of GNSS availability because building-reflected multipath signals degrade positioning accuracy and would affect integrity negatively. It’s obvious from these results that GNSS alone is insufficient to meet the autonomous driving requirements in an urban environment, and multi-sensor integrated navigation systems are needed to augment poor GNSS signal availability.
MULTI-SENSOR INTEGRATION
We begin by considering tightly coupled INS/GNSS integration using an EKF, and then integrate a realistic sensor suite including WSS and vehicle dynamic constraints that enforce resistance to lateral sliding and vertical movement. If it is known from another source that the vehicle is not moving (for example, it is in the parking gear), a static mode constraint (SMC) can also be applied.
INS/GNSS Integration. Tightly coupled INS/GNSS integration with an EKF uses the INS measurement to predict vehicle motion. The continuous process model uses a state vector having the position in the navigation frame, the velocity, the attitude, bias errors and cycle ambiguities, with the input vector having accelerometer-specific force measurement in the body frame and gyro-rotation-rate measurements. A white-noise vector drives the inertial measurement unit (IMU) states.
The GPS/GNSS measurement model includes the measurement vector having carrier and code phases, and the observation matrix containing LOS vectors and the vector of white receiver thermal noise.
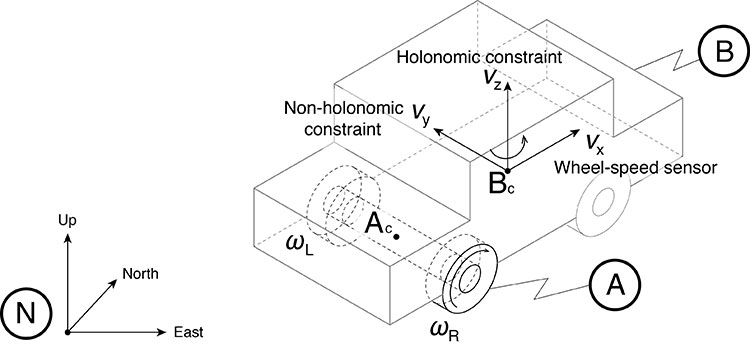
INS/GNSS/WSS/VDC Integration. For the vehicle in motion, we developed a model consisting of a WSS measurement in the along-track direction, a non-holonomic constraint resisting lateral sliding, and a holonomic constraint on vertical movement (see FIGURE 4).
The INS/GNSS/WSS/VDC integration using the EKF consists of the process model and the measurement models.
FIGURE 4. The measurement model consisting of the WSS measurement in the along-track direction (vx), non-holonomic constraint resisting lateral sliding (vy), and holonomic constraint on vertical movement (vz). N is the navigation frame, Ac is the rear-axle center point and Bc is the center point of the body-fixed frame. (Image: Authors)
INS/GNSS/SMC Integration. The static mode constraint provides zero-velocity measurements to the EKF measurement update to mitigate position error propagation. We use SMC only when it is known that the vehicle is not moving; for example, when the vehicle is in the parking gear.
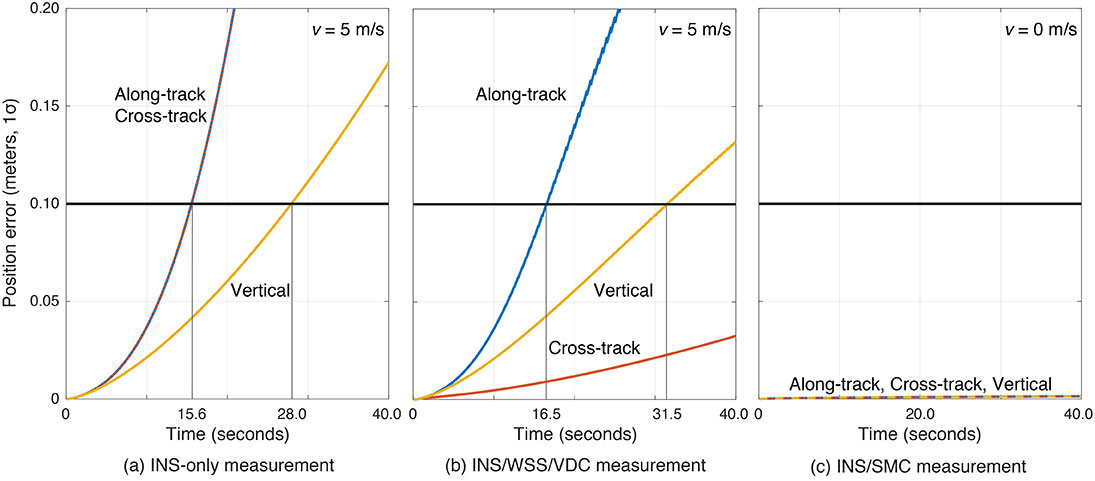
Error Propagation Analysis. We tested the time from perfect initialization to when position error exceeds 0.1 meters in GNSS-denied environments. FIGURE 5 shows the error growth in the along-track (x), the cross-track (y) and the vertical (z). The error specifications for a STIM300 tactical-grade IMU are used in this analysis. The standard deviation of the WSS measurement noise is assumed to be 0.05 meters per second, and the standard deviation of the movement constraint violations is 0.001 meters per second. The vehicle is moving at 5 meters per second except when we test the SMC.
The INS can coast 15.6 seconds before the position error standard deviation exceeds 0.1 meters in both the along-track and the cross-track directions (see FIGURE 5a). The INS/WSS/VDC can coast 16.5 seconds in the along-track direction, and significantly more than 40 seconds (the simulation duration) in the cross-track direction (see FIGURE 5b). In static mode, INS/SMC estimate errors do not grow with time in any direction, as expected (see FIGURE 5c). In GNSS-denied environments, the non-holonomic constraint suppresses the cross-track position error, but the WSS measurement hardly affects the along-track position error. The SMC works perfectly, but the usage is limited to when the vehicle is known to be stationary.
FIGURE 5. The vehicle position error growth vs. time in the along-track (x), cross-track (y) and vertical (z) directions. Each graph represents the navigation system introduced in the multi-sensor integration section. The vehicle is moving at 5 meters per second (a and b) or 0 meters per second (c). (Image: Authors)
SIMULATION SCENARIO
We imagine a future driverless-car mission scenario in which multi-sensor navigation systems are practicable. To minimize congestion in a city, autonomous vehicles will be held outside the urban core when not in use. In the clear open-sky environment, a vehicle in a parking lot completes GNSS initialization using the INS/GNSS/SMC system. Once requested for action, the vehicle departs for the city from the parking lot, and the motion of the vehicle improves alignment by the INS/GNSS system. Safe navigation can be ensured using the system to provide continuity under overpasses and bridges in the open-sky environment. Upon entering the urban core, navigation becomes more dependent on the INS/WSS/VDC system.
A reasonable numerical target for differential GNSS initialized position error is 0.02 meters, and for the INS alignment yaw angle error 0.1 degrees.
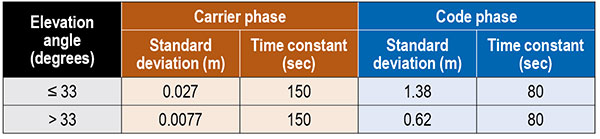
Local GNSS multipath errors from nearby vehicles will vary with the satellite elevation angle. Prior experimental results show that lower elevation-angle satellite signals (below 33 degrees) are much more likely to be impacted by multipath than higher ones (see TABLE 1).
Table 1. The nominal GNSS multipath error values in the simulation.
INITIALIZATION AND ALIGNMENT
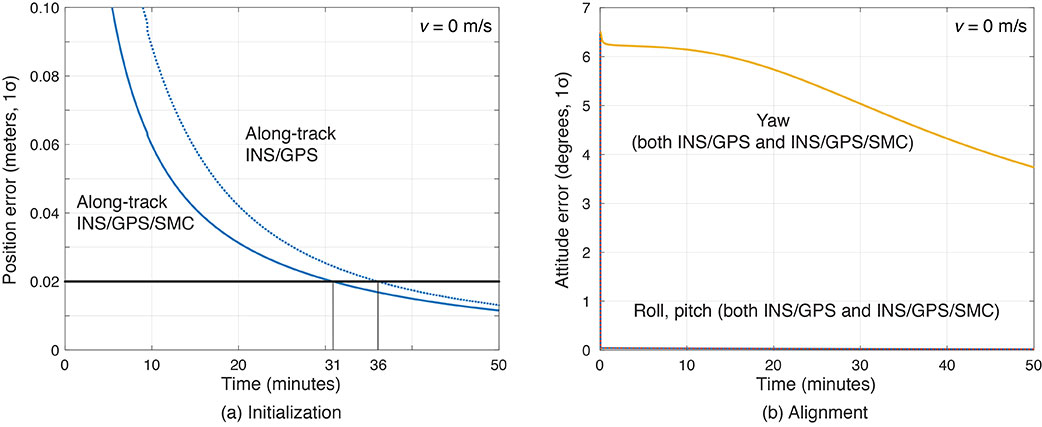
Initialization takes place in a parking lot with a clear sky view. A vehicle is in the parking gear, enabling SMC to be applied. FIGURE 6a shows a typical example: with INS/GPS/SMC, system initialization takes about 31 minutes, and with INS/GPS, about 36 minutes. Therefore, SMC does speed up GPS initialization, although the improvement is modest.
The yaw angle is not aligned during the initialization, but roll and pitch are immediately aligned (see FIGURE 6b). Earth’s gravity affects roll and pitch angle alignment but not yaw angle.
Yaw angle alignment cannot be performed when the vehicle is stationary or moving with constant velocity. Accelerated motion, either straight or turning, is required.
FIGURE 6. (a) Comparisons of initialization time between INS/GPS and INS/GPS/SMC in an open-sky environment. The INS/GPS/SMC system initializes rapidly. (b) Transitions of roll, pitch, yaw alignment during the initialization. Yaw angle alignment cannot be performed when the vehicle is stationary. (Image: Authors)
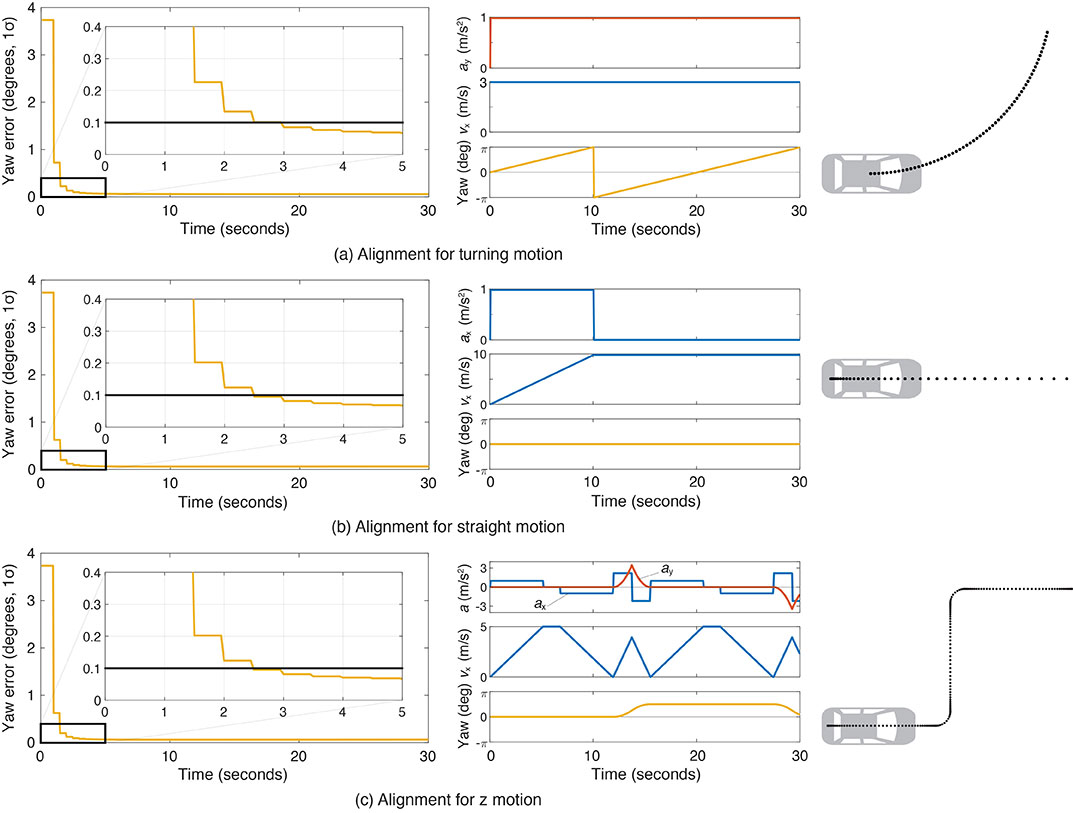
FIGURE 7 shows the behavior of the yaw angle error standard deviation using the INS/GPS system when centripetal (see FIGURE 7a) or tangential (see FIGURE 7b) acceleration is applied. The yaw angle can be aligned in a couple of seconds for either type of acceleration. To represent typical initial motions of self-driving cars, we model a parking-lot departure via a “Z”-shaped path. In this scenario, the yaw alignment error reaches 0.1 degrees within a couple of seconds (see FIGURE 7c).
FIGURE 7. The behavior of yaw angle error when centripetal (a) or tangential (b) acceleration is applied; (c) shows the behavior while following a z-shaped path. The yaw angle can be aligned in a couple of seconds in each case. (Image: Authors)
EVALUATION IN URBAN ENVIRONMENTS
After initialization and alignment in the open-sky environment, we simulated the vehicle traveling into the urban core. The urban environment in our study is 3D-mapped State Street in Chicago, which runs north-south and transits from low-rise neighborhoods to central downtown. We selected one congested section surrounded by tall buildings and computed the position error standard deviation along the path. The evaluation points are at 10-meter intervals over a total distance of 170 meters. The yellow lines in FIGURE 8 denote the visible satellites, identified by their pseudorandom noise (PRN) code numbers, at each point. We assume for convenience that the INS/GPS system is initialized and aligned at the first evaluation point. In reality, we would expect a degraded initial condition because we are starting the simulation in an urban canyon.
FIGURE 8. Evaluation points and PRN numbers of visible satellites at each point. (Image: Authors)
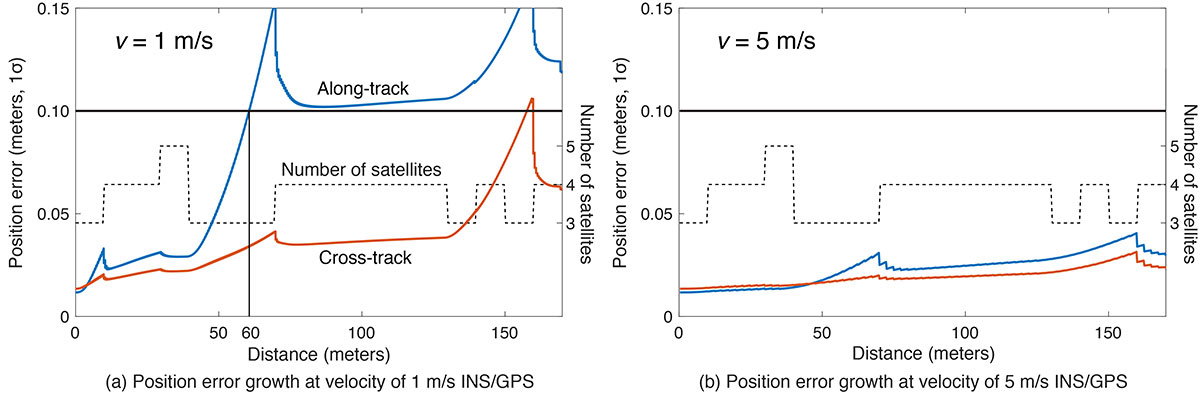
In the first simulation, the car equipped with the INS/GPS system moved either 1 or 5 meters per second. The y-axis in FIGURE 9 represents the position error standard deviation, and the x-axis represents the distance in meters. The dotted line expresses the number of visible satellites. The error when the vehicle velocity is 1 meter per second exceeded the maximum allowable position error standard deviation of 0.1 meter, at the distance of 60 meters. However, when the velocity was 5 meters per second, the maximum allowable position error standard deviation was never reached. It is also clear from the figures that error propagation is significantly affected by the number of visible satellites.
FIGURE 9. A comparison of position error growth between velocities of 1 meter per second and 5 meters per second. (Image: Authors)
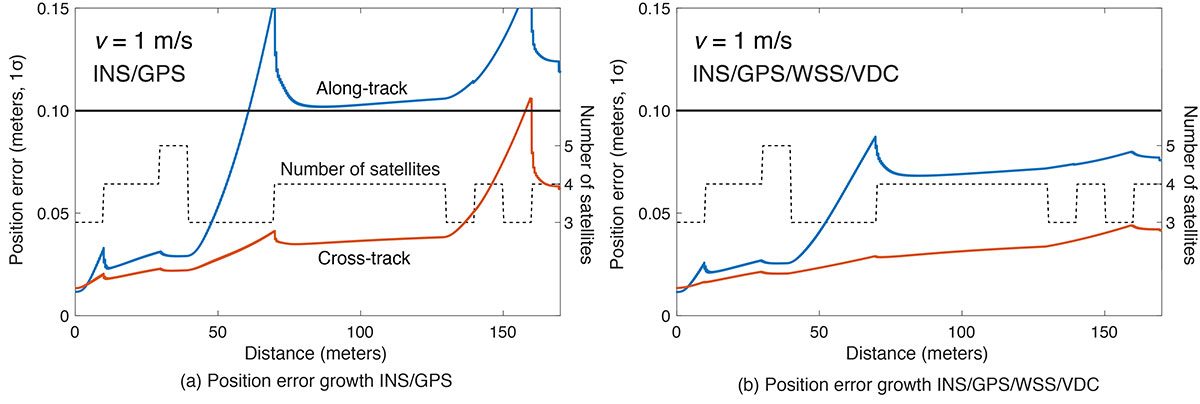
In the second simulation, we compared two different navigation systems, INS/GPS and INS/GPS/WSS/VDC. The vehicle moved at 1 meter per second in the same urban environment. The INS/GPS/WSS/VDC system does provide relief, but the error propagation is still clearly affected by the number of visible satellites (see FIGURE 10).
FIGURE 10. A comparison of position error growth between the INS/GPS and INS/GPS/WSS/VDC systems for a velocity of 1 meter per second. (Image: Authors)
In GNSS-challenged environments, INS error propagation is a function of time. When a vehicle moves faster, it clears the blockage area more quickly, reducing the impact of INS drift — a function of time, not distance. In contrast, GNSS error is completely determined by location. Because INS error propagation depends on how long the vehicle stays in an area of GNSS outage, protection levels for trips through the same area will be different if the vehicle is smoothly cruising or gets stuck in a traffic jam.
CONCLUSION
To gain a better understanding of how long and under what local conditions multi-sensor integrated navigation systems can maintain fault-free integrity, we evaluated navigation positioning errors in 3D-mapped downtown Chicago. The system we developed consists of sensors with which self-driving cars would reasonably be equipped: GNSS, INS, WSS and dynamic constraints. We showed that INS/GPS position errors along the path depend very strongly on the vehicle’s speed. When the system is augmented with WSS/VDC, position errors are suppressed, but the error propagation is still strongly influenced by the number of visible satellites.
ACKNOWLEDGMENTS
The research described in this article is supported by the National Science Foundation. Figure 1 was created by Alexis Arias of the Landscape Architecture + Urbanism Program at the Illinois Institute of Technology (IIT). The authors greatly appreciate the advice and help of Nilay Mistry from that program.
This article is based on the paper “Evaluating INS/GNSS Availability for Self-Driving Cars in Urban Environments” presented at ION ITM 2021, the virtual 2021 International Technical Meeting of The Institute of Navigation, Jan. 25–28, 2021.
KANA NAGAI is a Ph.D. candidate and research assistant in mechanical and aerospace engineering at IIT.
MATTHEW SPENKO is a professor of mechanical and aerospace engineering at IIT. He earned his M.S. and Ph.D. degrees in mechanical engineering from the Massachusetts Institute of Technology.
RON HENDERSON is a professor and director of the Landscape Architecture + Urbanism Program at IIT. He earned his Master of Landscape Architecture and Master of Architecture from the University of Pennsylvania.
BORIS PERVAN is a professor of mechanical and aerospace engineering at IIT. He earned his M.S. from the California Institute of Technology and Ph.D. from Stanford University.
Precision agriculture — which promises to reduce inputs of water, fertilizers and pesticides by matching them to variations in soil conditions, thereby reducing environmental impacts, while increasing yields and productivity and reducing fuel consumption —has been around for a long time. This magazine published a few issues of a special supplement on the subject more than 20 years ago. In recent years, the convergence of enabling technologies — including improved satellite-based sensors, unmanned aerial vehicles, ground-based sensors, and GNSS corrections services — and greater demand has made agriculture one of the largest users of GNSS.
Compared to autonomous vehicles on public roads, autonomous tractors, sprayers, combines, and other farming equipment pose much lower safety concerns, because they need not deal with the vagaries of traffic, accidents and construction. They also are not subject to the kind of signal occultation and multipath that is the bane of GNSS navigation in urban canyons and, at least for now, they are not at significant risk of jamming or spoofing. However, they face other challenges, including severe roll and pitch due to bumpy terrain, some multipath from silos and other tall structures, occasional signal interference, occasional dense tree canopies, the requirement to maintain exact heading at very low speeds, the need to receive corrections over very large areas, complicated weather conditions (including rain, fog and dust clouds) and, like every other sector, cost constraints.
Despite this, guidance for farm vehicles must be consistently accurate at the decimeter-level, lest the machines damage the valuable crops that they are designed to service.
In the following articles, seven companies briefly describe their advancements in precision agriculture:
Although GNSS has been applied in agriculture for many years, farmers still encounter challenges caused by GNSS. No matter the farm task — planting, spraying, harvesting or specialized applications such as robotic grass mowing — position accuracy matters.
Here are the most common issues farmers have and how Unicore’s products help.
Under canopy. They are unable to get a fix under heavy foliage canopy because the real-time correction signal is interrupted or “shaded out” by the canopy. Unicore is launching two new modules that will help mitigate this problem.
Loss of lock. At times, the receivers lose lock or get large position errors when the ionosphere’s effects are severe. Driven by a full-constellation and full-frequency RTK engine, Unicore’s RTK algorithm takes advantage of triple and quad frequency observables, effectively mitigating ionospheric residuals.
Loss of 4G signals. RTK can provide real-time centimeter-level high-precision positioning, which requires real-time base station data. In practical applications, radio or wireless network communication is often interrupted. During the interruption of the base station data, RTK’s positioning accuracy decreases quickly. Unicore’s RTK KEEP technology can maintain the centimeter-level positioning accuracy for more than 10 minutes after the interruption.
Lack of CORS stations. It is challenging to provide a stable high accuracy position for an ultra-long baseline. With the mitigation of ionospheric and tropospheric delays, Unicore products’ RTK baseline can be extended to up to 50 kilometers.
The UM980 is Unicore’s new-generation high-precision RTK positioning module, supporting full constellation and full-frequency. Relying on the strengths of high reliability, precise positioning accuracy and low latency, UM980 is not only well suited for high-precision surveying and mapping, but also a good choice for rover or base station receivers in agriculture.
The UM982 is a dual-antenna high-precision positioning and heading module. Since its master and slave antennas can simultaneously track all the frequencies of all the GNSS systems, the UM982 performs fast on-chip RTK positioning and dual-antenna heading solutions without the need to initialize the IMU. Featuring great positioning performance and stability, the UM982 is a perfect choice for high-precision agriculture applications, such as drones, autonomous tractors and autonomous lawnmowers.
Controlling weeds is a natural challenge in agriculture. The cost of controlling these unwanted plants is also one of the most expensive line items in a farmer’s budget. For third-generation Brazilian farmer Ivan Bedin, trying to rid his 8,620-hectare soybean and corn farm of hearty weeds has been a costly challenge.
“Typically, we’ve had to blanket spray weed-killing chemicals throughout the entire farm,” Bedin said. “Even if only 15% or 20% of the area was weed-infested, we had to spray the total area. We were spending more than $145,000 a year on chemicals, and it wasn’t good for the environment.”
The Bedin family then acquired Trimble’s WeedSeeker 2 technology. This intelligent spot-spray system senses whether a weed is present and signals a spray nozzle to deliver a precise amount of chemical, spraying only the weed. By targeting resistant weeds individually, WeedSeeker 2 can reduce the amount of herbicides used by up to 90%, promoting sustainability and cost savings on the farm.
While driving 18–20 km/hr, the sprayer’s operator focuses on the WeedSeeker application while the AutoPilot system guides the sprayer. As he drives between crop rows, optical sensors distinguish the green of the crop from the green weed and release herbicide just on the weed. From inside the cab, the operator can monitor the spray system and adjust any application parameters in real time. With the reliability of the steering technology and the efficiency of WeedSeeker, Bedin has been able to reduce refueling time and cover his entire field 30% faster than with his conventional system.
Most importantly, the technology has significantly slashed his weed-chemical expense. “WeedSeeker 2 has yielded us nearly 90% savings in herbicide costs,” said Bedin. “Now we only need to spray between 10% to 30% of the farm — where the weeds actually grow — which equals a savings of about $70,000 for each 1,000 hectares sprayed. Additionally, because we use less herbicide, we impact the environment less.”
Because the spot-spray system logs and maps every weed sprayed, Bedin can also see in real time where there are weed infestations and review the detailed maps before the next spray. With the “seek and destroy” premise of WeedSeeker 2, Bedin’s formidable weeds may have finally met their match.
On a French vineyard in the Loire Valley, a tractor is driving between the grape vines with no one behind the wheel. Meet TREKTOR, the autonomous hybrid robot that works tirelessly to weed the organic vineyard producing some of the finest Gamay wine, called Anjou Gamay Village.
After TREKTOR worked the land for a month, its developer, a company called Sitia, reviewed the quality of their autonomous robot’s work. They counted grape vines damaged during operation — two in one month — and approached the farmer to reconcile the liability. To Sitia’s surprise, he responded, “When I use my manual tractor to get the same job done, I damage at least two vines a day! How did your tractor manage to be so careful?” Sitia’s developers thought for a while and then replied, “It’s thanks to the high quality and accuracy of the components that are inside.”
“Despite the strong magnetic field emitted by the generator on the TREKTOR, the AsteRx SB ProDirect receiver did not have any issues,” said Clément Aubry-Tardif, Sitia’s R&D manager. “The spectrum analyzer in its web interface showed other small radio interferences aboard the robot, but everything was still working fine.”
Integrated into the TREKTOR is an AsteRx SB ProDirect dual-antenna receiver, which provides the reliable high-accuracy positioning and heading needed for autonomous operation. Sitia chose the receiver for the following reasons.
It has centimeter-level accuracy with RTK, which reduces crop damage and increases yields.
Its heading helps point implements in the right direction. Unlike inertial systems, it’s reliable and accurate even in static or slow-moving applications.
Built-in advanced interference mitigation (AIM+) technology makes it resistant to radio interference, while its LOCK+ technology ensures robust satellite tracking even under intense vibrations or shocks.
It includes an intuitive web interface for fast prototyping and easy real-time testing.
Sitia is a French company specializing in autonomous robots. Its TREKTOR helps compensate for the current farmer shortage, which is especially felt on organic farms, where weeding is seven times more labor intensive due to the use of few (if any) herbicides. TREKTOR is a flexible solution that can adjust its height and width on the fly, adapting to various working environments. It can also change implements to perform various functions. Depending on TREKTOR’s dimensions and implements, the distance from the crop to the robot changes, making high-accuracy positioning crucial to minimize damage to any of the crops.