Point One Navigation is showcasing an ongoing collaboration with STMicroelectronics, a relationship that has made its real-time kinematic (RTK) and positioning engine solutions accessible to ST customers developing autonomous vehicles, robotics, and precision navigation applications.
AutoSens 2026, taking place in Detroit, Michigan, June 9-11, will bring together experts in the field of automotive sensing technology.
Point One Navigation’s software platform integrates seamlessly with ST’s new Teseo6 family of GNSS receiver chipset and module solutions to deliver a complete, off-the-shelf precise positioning system.
By combining ST’s GNSS receiver and measurement engine with Point One’s RTK correction service and advanced dead-reckoning algorithms, customers can achieve centimeter-level accuracy for their navigation solutions without the complexity of developing these capabilities in-house.
At AutoSens 2026, Point One and ST are collaborating to showcase an integrated solution that highlights the power of their joint technology. The demonstration features live precision location data and real-time performance analytics, illustrating the effectiveness of the Teseo6 automotive-grade solutions paired with Point One’s advanced dead-reckoning and corrections services in a variety of automotive and autonomous driving scenarios.
“Through our strong collaboration with STMicroelectronics, we are able to deliver proven precision positioning technology to ST’s global customer base,” said Aaron Nathan, CEO, Point One Navigation. “Our RTK and dead-reckoning software, combined with ST’s Teseo6 GNSS receiver, provides developers with a ready-to-integrate solution that matches or exceeds competing systems while accelerating time-to-market for robots, autonomous vehicles, and other applications requiring centimeter-accurate navigation.”
“The key to precise navigation is feeding the application a trusted position, that maximizes integrity and minimizes error,” said Mike Slade, GNSS product marketing manager, STMicroelectronics. “The collaboration between ST’s Teseo6 GNSS receiver and Point One’s complementary dead-reckoning and RTK correction services ensures high signal availability and the centimeter-accurate positioning needed for consistent and predictable operation.”
The adoption of the new, modernized National Spatial Reference System (NSRS) is rapidly approaching, with official implementation now expected in the first quarter of 2027.
One of the most common questions I receive during presentations is: How will the National Geodetic Survey (NGS) account for plate tectonics in the modernized NSRS, and what does that mean for my geospatial products and services?
First, I have some very sad news to share.
Dr. Chris Pearson
Our friend and colleague, Dr. Chris Pearson, unexpectedly passed away while in Cape Town attending the May 2026 International Federation of Surveyors (FIG) conference. At the time, he was serving as a Geodetic Advisor for Trimble and as co-chair of FIG Commission 5.2.
Chris previously worked for the National Geodetic Survey (NGS) as a Geodetic Advisor, where he played a key role in developing the comprehensive block model of crustal deformation — widely known as HTDP — across the western United States, including Alaska.
He was an active and respected member of several professional organizations and will be greatly missed by the entire geodetic and surveying community.
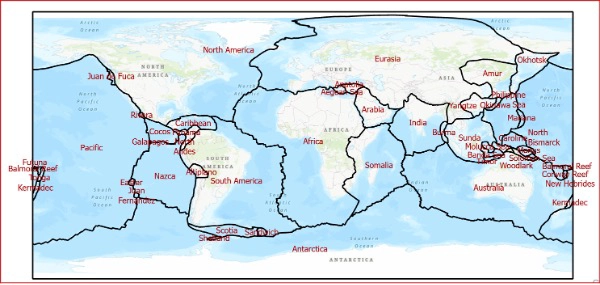
Plate tectonics is the scientific theory that describes how Earth’s outer shell, known as the lithosphere, is divided into large, rigid pieces called tectonic plates. These plates float atop the hotter, more ductile rock in the mantle below and move very slowly — roughly at the same rate as your fingernails grow, about 1 to 10 centimeters per year.
So why does plate tectonics matter for geodetic coordinates? Because the most significant geological activity — including earthquakes, volcanic eruptions, and crustal deformation — occurs primarily at the boundaries where these plates interact.
My last newsletter highlighted several activities by the North Carolina 2022 Reference Frame Working Group (NC RFWG) that are addressing this issue and other challenges related to the implementation of the new NSRS.
During my presentations on the modernized NSRS, I always show the National Geodetic Survey (NGS) maps that illustrate the approximate horizontal and vertical changes expected when the new Terrestrial Reference Frames (TRFs) are adopted, with coordinates referenced to epoch 2020.00. These maps provide a high-level (“30,000-foot”) overview of the anticipated changes. However, they do not include the level of detail that many users are looking for.
Participants at these seminars and meetings consistently want to know the expected coordinate differences for their specific state or local region, and how the time-dependent components will impact their work.
Most geospatial users now understand that International Terrestrial Reference Frame (ITRF) coordinates include a velocity component caused by tectonic plate movement. To manage these changing coordinates, the National Geodetic Survey (NGS) plans to incorporate time-dependent modeling. NGS has developed two key models — EPP2022 and IFDM2022 — to make time-dependent geodetic control practical and usable.
EPP2022 (Euler Pole Parameters) describes the rigid rotation of tectonic plates.
IFDM2022 (Intra-Frame Deformation Model) computes the internal deformation and drift within a tectonic plate.
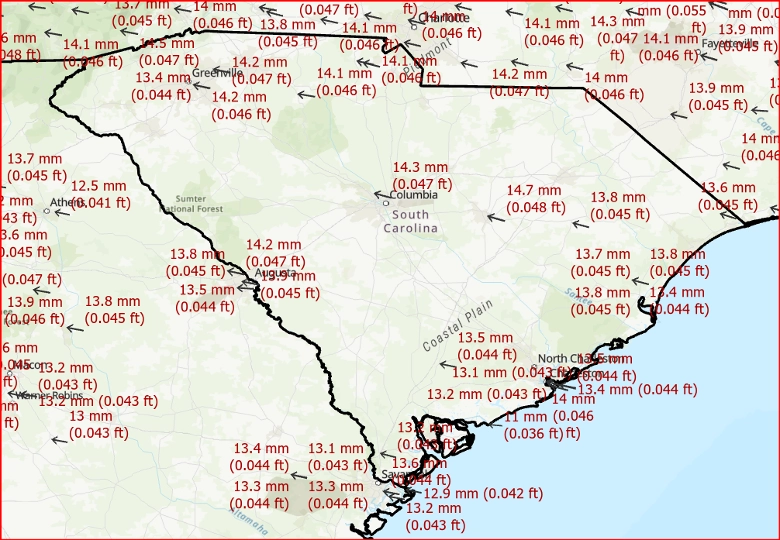
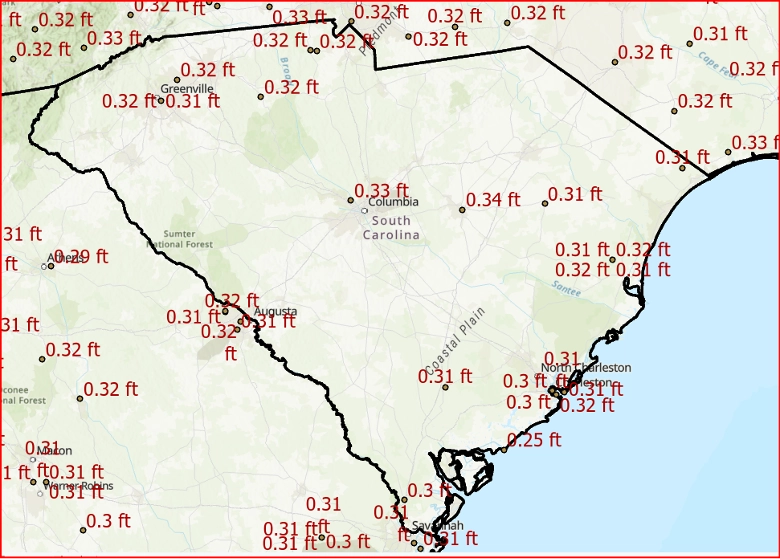
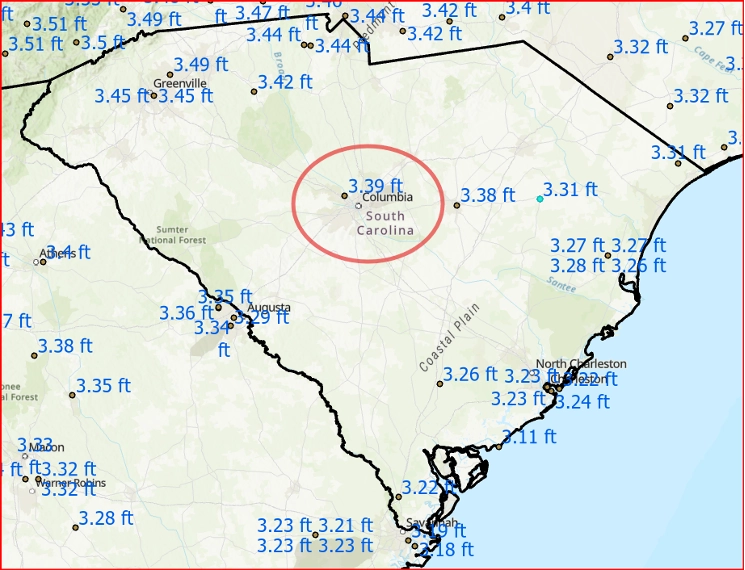
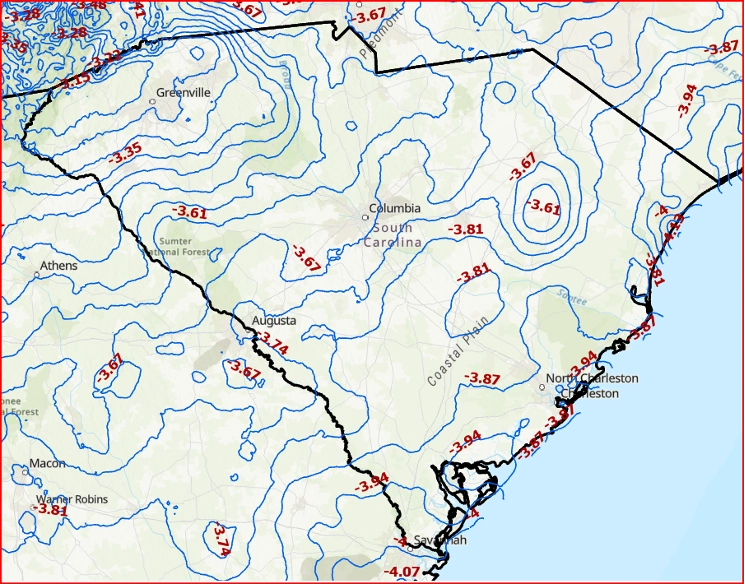
As shown in the figure below, the NOAA CORS Network station COLA in Columbia, South Carolina — located on the North American Plate — is moving at approximately 0.05 feet (14 mm) per year.
This velocity is provided on the published ITRF2020 position and velocity data for the station (NGS CORS Position and Velocity Sheet for COLA). As a result, a surveyor working in June 2026 would observe a shift of about 0.3 feet in the ITRF2020 horizontal coordinates compared to the 2020.00 reference epoch, solely due to tectonic plate motion.
Motion due to plate movement (rates per year) – based on ITRF2020 velocity rates
(Image: Dave Zilkoski)
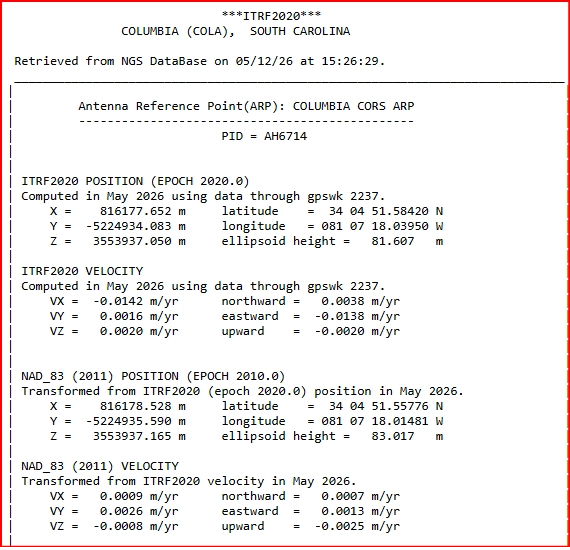
The National Geodetic Survey (NGS) provides detailed information for all NOAA CORS Network (NCN) stations on the NGS NCN Station Pages.
In the section titled “Coordinates and Velocities”, simply click the Position and Velocity button to view the station’s ITRF2020 coordinates and velocities (referenced to epoch 2020.00), as well as the NAD 83 (2011) coordinates and velocities (referenced to epoch 2010.00).
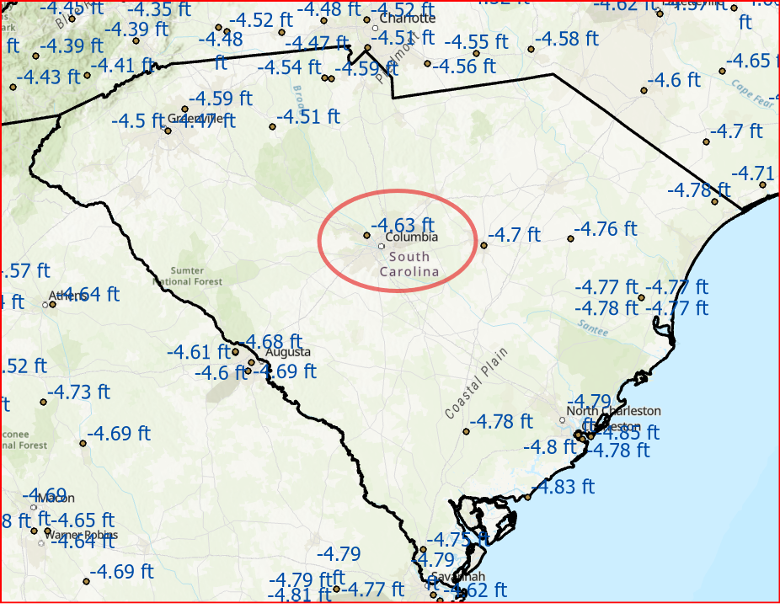
As previously mentioned, the National Geodetic Survey (NGS) is expected to adopt the new modernized NSRS in the first quarter of 2027. The figure below shows the change in ITRF2020 coordinate values between epoch 2020.00 and 2027.00 for NOAA CORS Network (NCN) stations in South Carolina. This shift of approximately 0.33 feet (10 cm) is the result of seven years of tectonic plate motion.
ITRF2020, Epoch 2020 to ITRF2020, Epoch 2027 (units ift)
Image: Dave Zilkoski
That said, what will the change in NATRF2022 coordinate values be between epoch 2020.00 and 2027.00?
This is where NGS’s EPP2022 and IFDM2022 models become essential. My February 2022 and July 2024 GPS World newsletters discussed the Euler Pole Parameters (EPP) process in detail.
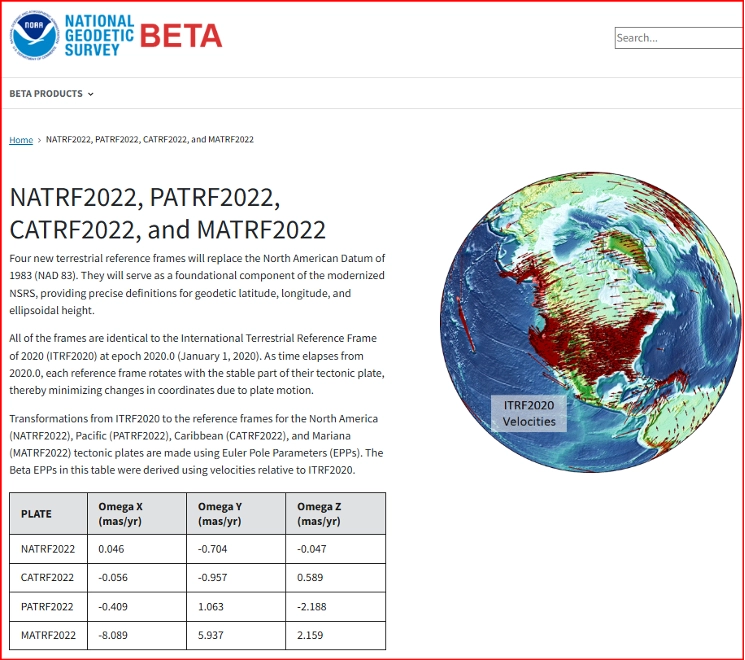
The Beta NATRF2022 website provides the Euler Pole Parameters (EPP) needed to define the relationship between ITRF2020 and the new NATRF2022 frames for the North American, Caribbean, Pacific, and Mariana plates, as outlined in NGS’s Blueprint Part 1 document. The values in the table have proven especially useful to programmers developing and testing their software.
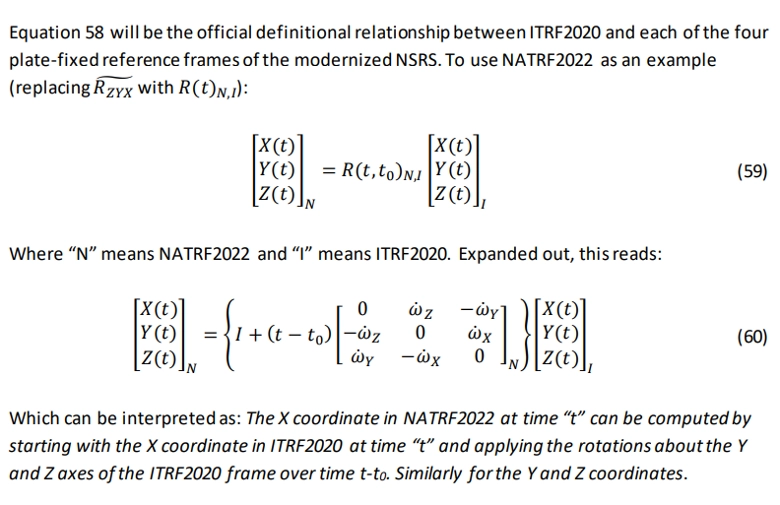
As stated in Blueprint Part 1, the National Geodetic Survey (NGS) will define the official relationship between ITRF2020 and the four NSRS Terrestrial Reference Frames (TRFs) through Equation 59. This equation uses the rotation matrix provided in Equation 58, which results in Equation 60.
See the box titled “Official Relationship Between ITRF2020 and the Four NSRS TRFs” for the equations.
Official relationship between ITRF2020 and the four NSRS TRFs
(Image: NGS Blueprint pt. 1)
So, what does this mean for surveyors?
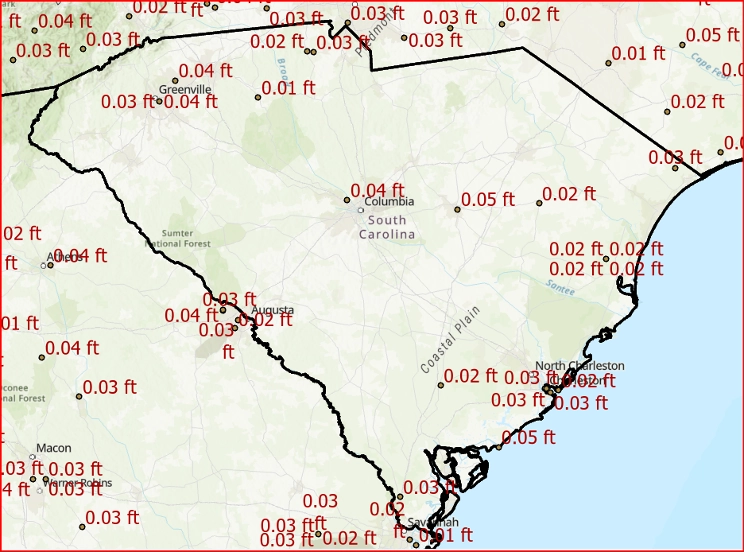
The primary purpose of the EPP2022 model is to remove the rigid tectonic plate motion from the coordinates. After applying the EPP2022 model to the ITRF2020 coordinates at epoch 2027.00, the resulting NATRF2022 horizontal coordinates for station COLA (epoch 2027.00) will change by only 0.04 feet (12 mm).
EPP applied
NATRF2022, Epoch 2020 to NATRF2022, Epoch 2027 in SC (units ift)
Image: Dave Zilkoski
As shown in the figure, the EPP2022 model removes most of the horizontal movement caused by seven years of tectonic plate motion — reducing it to just 0.04 feet (1.2 cm) at station COLA. In other words, the EPP model effectively removes the vast majority of plate tectonic effects.
Additionally, the plot shows that the relative horizontal differences between nearby marks are very small — typically less than 0.01 feet (0.3 cm).
As previously mentioned, the NGS maps provide a high-level (“30,000-foot”) view of the expected changes between the current NSRS and the new modernized NSRS. So, what are the anticipated differences between NAD 83 (2011) and NATRF2022 specifically in South Carolina?
The figures below illustrate the differences in both horizontal position and ellipsoid heights between NAD 83 (2011) and NATRF2022 coordinates across South Carolina.
NAD83 (2011), Epoch 2010 to NATRF2022, Epoch 2020 Horizontal Changes in SC(Units ift)
NAD83 (2011), Epoch 2010 to NATRF2022, Epoch 2020 Ellipsoid Height Changes in SC(Units ift)
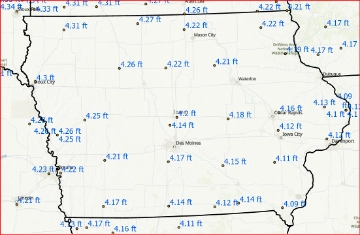
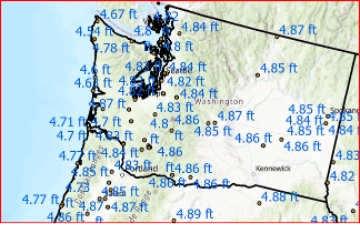
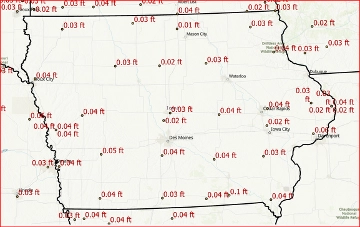
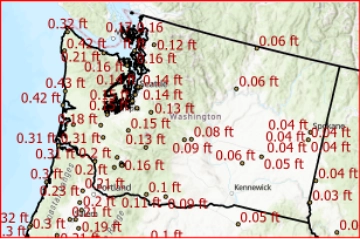
The magnitude of these changes varies depending on your location. To illustrate this, I’ve provided two additional examples: one for Iowa and one for Washington State. As the plots clearly show, the differences in these states are noticeably different from those depicted for South Carolina.
That said, the differences between NATRF2022 at epoch 2020.00 and epoch 2027.00 in Iowa and Washington State — after applying the EPP2022 model — are very similar to the values shown for South Carolina.
However, readers should note that the differences in Washington State increase as you move toward the coast. This is because the area lies near the boundary between the North American Plate and the Pacific Plate. The Juan de Fuca Plate, a small microplate in the eastern North Pacific, is also actively involved in this region.
(See the box titled “Juan de Fuca Plate.”)
NATRF2022, Epoch 2020 to NATRF2022, Epoch 2027 (units ift)EPP Applied
What about orthometric height changes in the new NSRS?
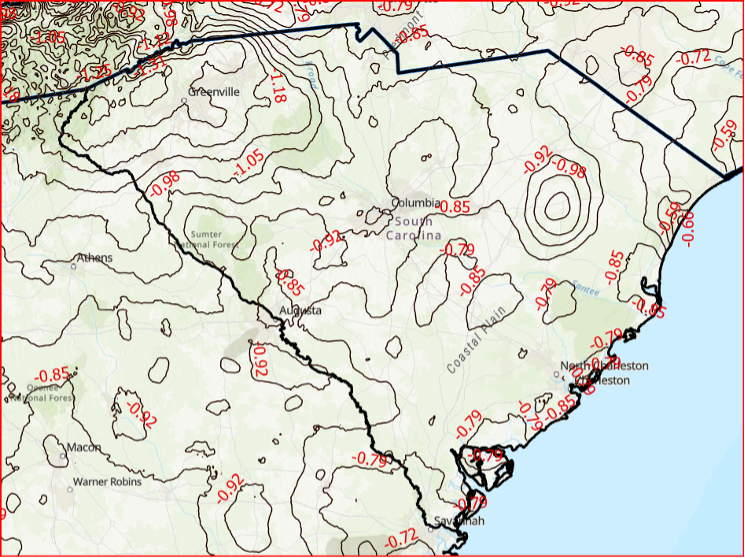
As an example, the orthometric height differences between NAPGD 2022 and NAVD 88 in South Carolina are expected to range from approximately -0.8 feet to -1.3 feet.
Difference between NAPGD2022 and NAVD 88 (Units ift) in S.C.
Image: Dave Zilkoski
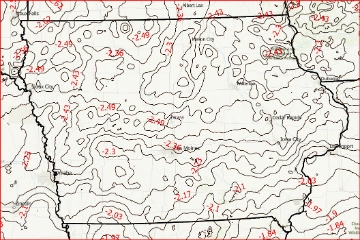
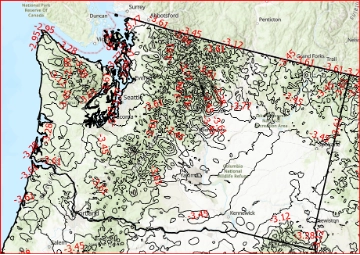
The differences between NAPGD 2022 and NAVD 88 vary significantly depending on your location. The figures below illustrate these orthometric height differences for Iowa and Washington State as examples.
Difference between NAPGD2022 and NAVD 88 (Units ift)
The new NSRS will use a gravimetric geoid (GEOID2022) rather than a hybrid geoid (GEOID18) to compute GNSS-derived orthometric heights.
During my presentations, I always remind participants that a hybrid geoid is not a “true” geoid. It is simply a transformation model that converts ellipsoid heights in one reference frame to orthometric heights in a specific vertical datum. Specifically, GEOID18 is a transformation tool that allows users to derive NAVD 88 orthometric heights from NAD 83 (2011), epoch 2010 ellipsoid heights.
The figure below shows the differences between the gravimetric geoid model GEOID2022 and the hybrid geoid model GEOID18.
Important note: Users cannot use GEOID18 with NATRF2022 ellipsoid heights to obtain NAVD 88 orthometric heights. Instead, GEOID2022 must be used with NATRF2022 ellipsoid heights to compute orthometric heights in the new vertical datum, NAPGD 2022.
Differences between GEOID2022 and GEOID18 in SC (Units ift)
As noted at the outset of this newsletter, the transition to the modernized National Spatial Reference System (NSRS) is rapidly approaching, with official implementation scheduled for the first quarter of 2027.
The National Geodetic Survey (NGS) released the following announcement on May 28, 2026:
Public Testing Period Ends for Key NSRS Modernization Products
NGS has declared the following products stable and ready for implementation planning and integration activities ahead of the official release:
North American-Pacific Geopotential Datum of 2022 (NAPGD2022)
New Terrestrial Reference Frames of 2022:
North America (NATRF2022)
Pacific (PATRF2022)
Caribbean (CATRF2022)
Mariana (MATRF2022)
State Plane Coordinate System of 2022 (SPCS2022)
Additional modernization products, including NCAT, OPUS, and the Data Delivery System, are scheduled for release later in 2026.
NGS news
Public testing period ends on specific NSRS modernization products
This newsletter highlighted the role of the EPP2022 model in accounting for plate tectonics and illustrated the anticipated local differences between the current National Spatial Reference System (NSRS) and the upcoming modernized version.
Future editions will continue to explore additional NGS Beta products as they are released later in 2026.
HRL Laboratories has introduced a new inertial measurement unit (IMU) that provides near navigation-grade accuracy in a palm-sized package.
Smaller and lighter than grade-equivalent conventional sensors, HRL’s AXI-R100 delivers range-extending accuracy for GPS-contested navigation. The product is now ready for pre-production orders.
Using silicon microelectro-mechanical systems (MEMS) technology, HRL’s gyros exceeds the performance of many tactical-grade IMUs in the same or smaller package size, and is manufactured in high volumes at wafer-scale. This near navigation-grade performance is available at a tactical-grade price.
The new IMU is suitable for use in defense, aerospace and automotive applications, including missile-guidance systems and drone navigation, as well as for commercial automotive applications with higher levels of autonomy. The product is ready for integration as it has been designed and tested against challenging vibration, shock and thermal conditions representative of those applications.
HRL will present product specifications at the 2026 Joint Navigation Conference, taking place this week in Cincinnati, Ohio, and is exhibiting in booth 129.
By leveraging high volume design automotive methodologies, HRL designed AXI-R100 navigation sensors to scale for high-volume automotive demand while maintaining performance superiority over traditional tactical-grade sensors. The result is a gyroscope compatible with foundry fabrication processes for high volume applications.
“Our gyroscopes and inertial sensors support navigation, pointing and stabilization systems for autonomous vehicles, aircraft and guided missile and munition applications,” said Jeff Dickman, director, Precision Sensing, HRL Laboratories. “We leveraged our extensive microelectronics legacy along with innovations in micromechanical and manufacturing processes to pave the way for AXI-R100 to address the urgent needs from our industrial base.”
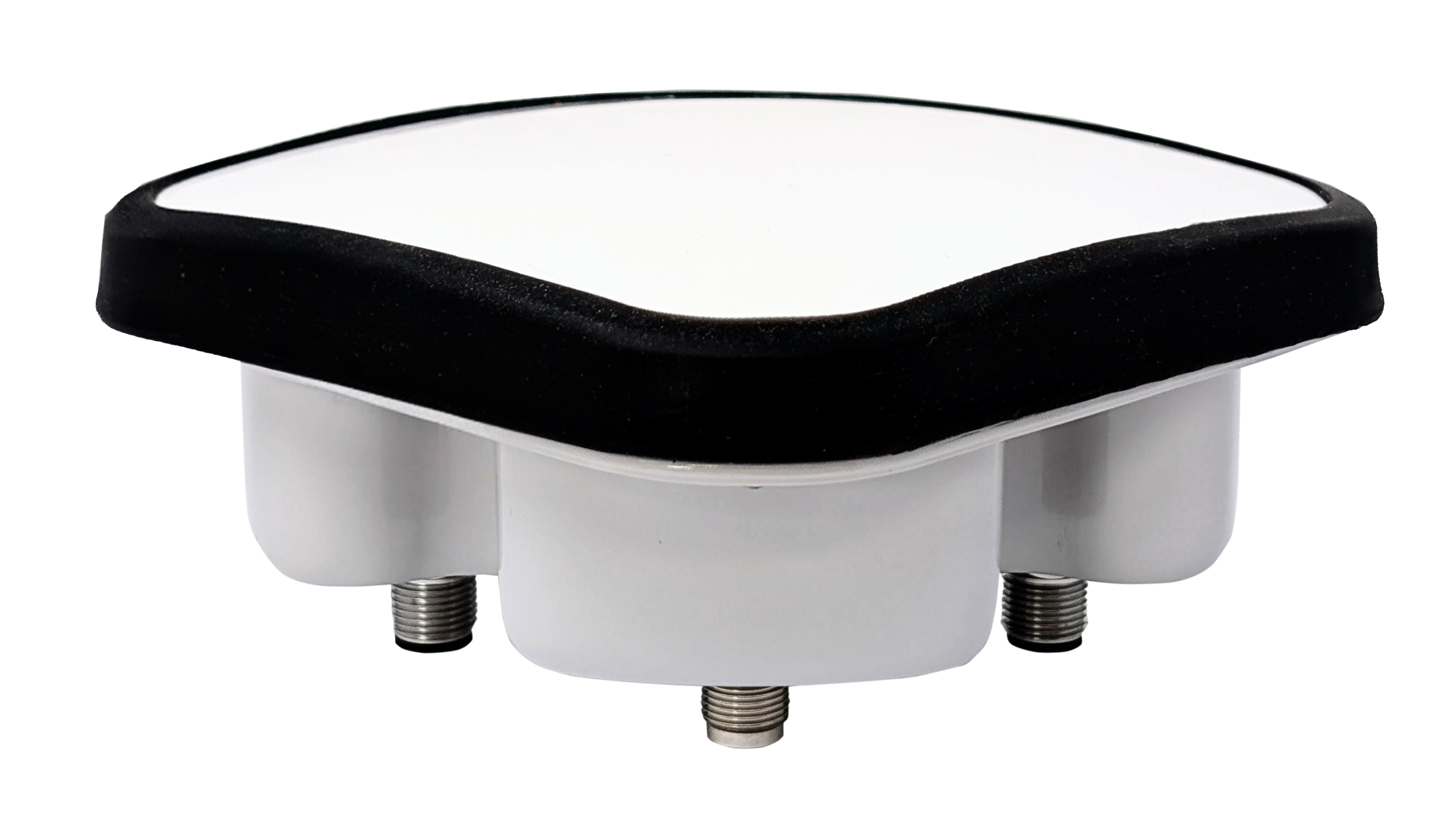
Calian has introduced two pole mount variants of its controlled reception pattern antenna (CRPA) line. The new models support L1/E1 + L2/E5b (CR8894PXF+) and L1/E1 + L5/E5a (CR8854PXF+), giving customers expanded deployment and frequency support options for resilient GNSS applications.
The new architecture increases installation flexibility across critical infrastructure, timing, marine and defense environments while maintaining Calian’s CRPA and extended filtering plus (XF+) interference mitigation performance.
Flexible deployment
The pole-mount design integrates into fixed and marine installations such as communications towers, vessels, monitoring stations and critical infrastructure, supporting rapid setup and optimal antenna placement.
With dual-band options, the platform aligns with modern multi-frequency GNSS architectures, improving accuracy, robustness, interference rejection and compatibility with current and next-generation receivers.
Advanced anti-jamming features include:
GPS and Galileo support
Operation across L1/E1 and L2/E5b or L5/E5a
Mitigation of three jamming sources per band
Integrated XF+ filtering for superior out-of-band rejection and cross-band isolation
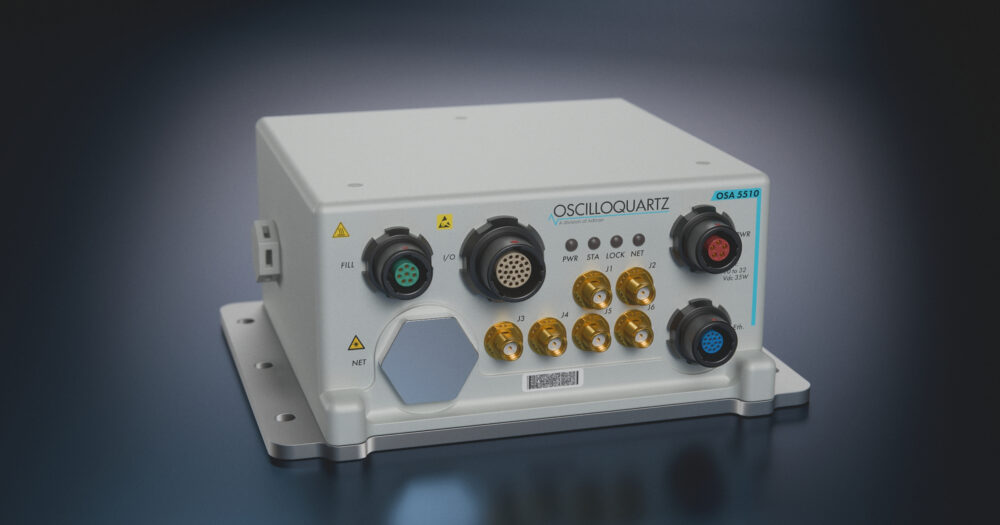
Oscilloquartz has launched its ruggedSync Series OSA 5510, a ruggedized timing and synchronization platform engineered for defense and other harsh, mission-critical environments.
The OSA 5510 is designed for deployment in tactical communications networks, mobile command centers, aviation systems and other highly demanding operational environments. It combines PTP grandmaster and NTP server functionality with synchronization assurance and resilient holdover in a compact military (MIL)-qualified platform.
Multi-band GNSS support, encrypted and authenticated timing options, and environmental protection enable operation in contested and GNSS-denied environments where trusted synchronization must be maintained.
Built to support resilient defense timing architectures, the OSA 5510 integrates advanced synchronization technologies and flexible mission-critical interfaces within a hardened platform compliant with MIL-STD-810H and MIL-STD-461G. The solution supports IEEE 1588v2 PTP, SyncE and secure NTP services, while programmable I/O and timecode interfaces, including STANAG, Have Quick, IRIG and PPS/CLK distribution, support diverse defense payloads and operational requirements. Optical and copper SFP/SFP+ 1G/10G interfaces and dual power feeds further enable deployment across modern high-bandwidth defense networks.
The ruggedSync Series OSA 5510 strengthens multi-source resilience through zero-trust architecture, with support for M-code, Galileo PRS and Iridium STL. Extended holdover, low phase-noise outputs, and jamming and spoofing detection and mitigation help maintain continuity during GNSS degradation or disruption, while White Rabbit readiness supports advanced timing distribution use cases.
The launch also builds on Oscilloquartz’s expanding global aerospace, defense and government partnerships, including regional representative and VAR relationships supporting resilient timing and assured PNT deployments across the Americas, EMEA and Asia-Pacific.
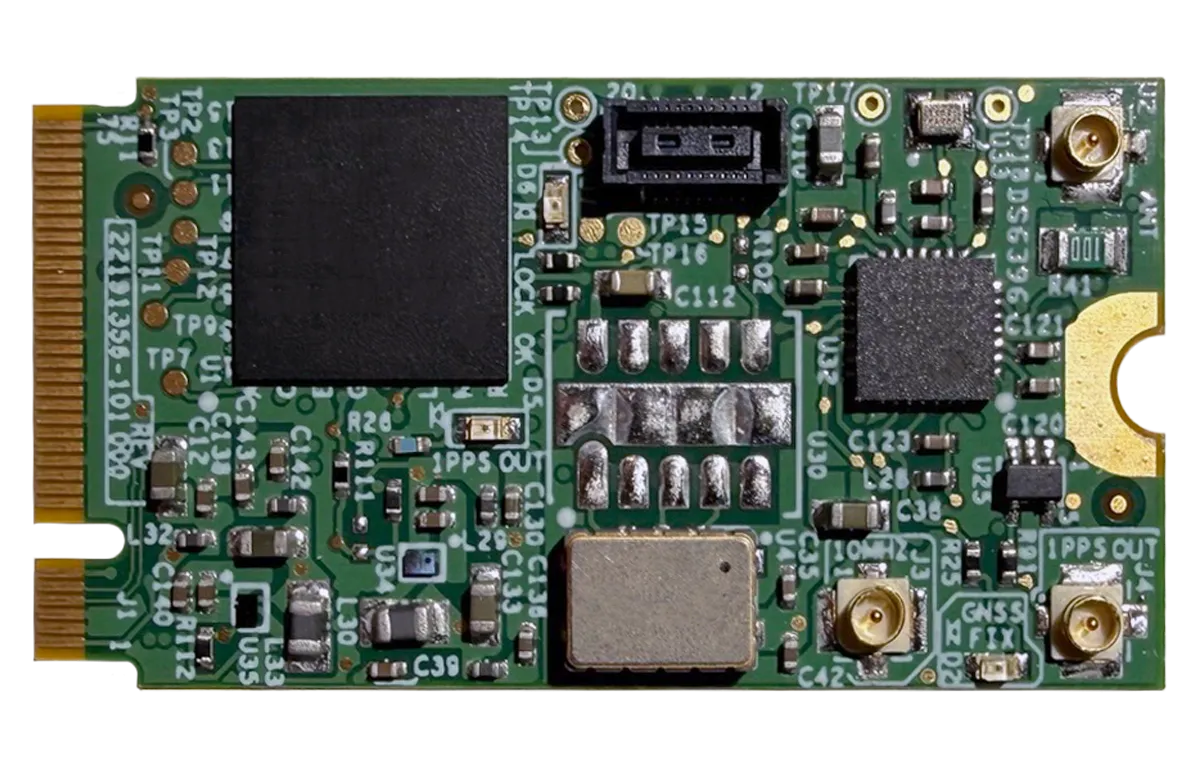
Viavi Solutions has launched the µPNT GDO-1000, a GNSS-disciplined oscillator built in the M.2 B-key form factor, suitable for low size, weight and power (SWaP) platforms.
Measuring 22 x 42 mm (the size of a postage stamp) and weighing less than 4 grams, the GDO-1000 is designed for platforms requiring accurate timing in places where traditional timing modules do not fit or are too power-hungry, including defense and airborne platforms, unmanned systems, data center cards, and communications equipment.
The µPNT GDO-1000 addresses these challenges through a combination of capabilities:
Dual-frequency L1/L5 GNSS reception with microsecond-class 24-hour holdover enables precise, resilient timing in compromised conditions.
The M.2 B-key form factor drops into modern compute platforms, time appliance cards, and embedded systems without custom mechanical design, drawing approximately half a watt.
Patented AI and ML algorithms developed by the Jackson Labs team, now part of VIAVI, predict and compensate for oscillator behavior across environmental conditions
The microelectro-mechanical systems (MEMS) oscillator delivers better thermal stability across the full military temperature range than traditional quartz oven-controlled crystal oscillators (OCXOs), with sustained phase noise and Allan Deviation performance under vibration and shock
It accepts an external 1PPS input, allowing it to be disciplined by M-code GPS, alternative navigation sources, or other external references without hardware modification
Multiple 1PPS and low-phase-noise 10MHz coaxial inputs and outputs for system integration flexibility, despite its miniature size.
The GDO-1000 will be on display by Viavi at booth 407 during the 2026 Joint Navigation Conference, taking place June 1-4 at the Northern Kentucky Convention Center. As part of the event technical program, Lisa Perdue and Nino De Falcis of Viavi will speak on a “New Cesium-Less ePRTC Solution to Provide Timing for Homeland Critical Infrastructure.”
Russian acts targeting critical infrastructure, satellite signal interference paralyzing maritime and air navigation, and cognitive operations aimed at intimidating European societies are examples of Russian hybrid activities targeting the Baltic Sea region states.
The paper, “White Paper on Russian Acts of Sabotage and Subversion against Members of the Council of the Baltic Sea States,” can be downloaded here. Authors Filip Bryjka, Anna Maria Dyner and Aleksandra Kozioł are with the Polish Institute of International Relations.
The report explores GNSS signal disruptions in the Baltic Sea and how it affects the safety of maritime and air traffic.
Scale and Methods of Russian Operations
Since the beginning of the full-scale invasion of Ukraine, Russia has intensified its hybrid activities against NATO member states, particularly those that have most actively supported Ukrainian resistance. This group includes the members of the Council of the Baltic Sea States. It is against them that the vast majority of acts of diversion and sabotage recorded in Europe since February 2022 have been directed.
Russia deploys a full spectrum of tools against the region:
Acts of diversion and sabotage targeting critical infrastructure.
Border incidents: Violations of airspace and maritime borders.
GNSS signal disruptions (satellite radio transmissions), creating operational problems for maritime and air navigation.
Cognitive influence, aimed at causing measurable damage, testing state responses, and inducing a sense of growing threat among societies.
Recommendations: How to Counter Hybrid Threats?
The offensive nature of Russian actions demonstrates an intent to destabilize NATO and EU countries. Effective defense requires developing shared mechanisms:
Close cooperation among agencies: Ensuring a high level of situational awareness through the coordination of activities (at both national and international levels) among military and civilian intelligence, counterintelligence, border guard services, and the police.
A dedicated information exchange system: Leveraging the geographical proximity and potential of the CBSS states to quickly share threat data.
Unambiguous attribution of persuasions: Publicly naming Russia as the author of the attacks. A lack of clear attribution hinders coordinated preventive and retaliatory measures.
A catalog of best practices: Developing common rules for monitoring, reporting, and responding to known and repetitive Russian operational patterns.
The authors conclude that only a full spectrum of coherent measures taken by all states in the region, alongside NATO and EU structures, can effectively influence Russia and reduce the risk of future incidents.
A two-kilometer free-space demonstration validates quantum-secure communications and resilient PNT capabilities
Xairos Systems has met a significant milestone for its Ares Quantum Optical Terminal, a robust system designed to deliver quantum-secure, high-data-rate communications and resilient position, navigation and timing (PNT) in RF- and GPS-denied environments.
The Ares terminal will combine 10 Gbps free-space optical communications, entangled photon distribution for timing and encryption key sharing, and a stable clock ensemble disciplined by Xairos’ exclusive Quantum Time Transfer technology.
Xairos completed two-kilometer free-space range testing with Space Development Agency-compliant optical communications and established simultaneous quantum and optical links using a common Ares Quantum Optical Terminal. This free-space testing — distinct from fiber-based demonstrations — marks a critical step toward real-world operational deployment.
The fully integrated Ares Quantum Optical Terminal will combine 10 Gbps free-space optical communications, entangled photon distribution for timing and encryption key sharing, and a stable clock ensemble disciplined by Xairos’ Quantum Time Transfer (QTT) technology — all within a ruggedized compact package. QTT provides unprecedented security and resilience for PNT where GPS and RF signals are unavailable or jammed.
The Ares Quantum Optical Terminal underpins a communications and PNT mesh network for aircraft, uncrewed aerial systems (UAS), ships, and other assets in contested environments, and serves as a foundation for a future space-based architecture spanning satellites, air vehicles and ground nodes.
Developed for a U.S. Army Program of Record, the TRX DAPS GEN II solution provides warfighters with a resilient, trusted source of position, navigation and timing (PNT) that remains operational in GPS-degraded, jammed or denied environments.
The new enhancements strengthen DAPS GEN II system performance in extended-duration threat environments and include a new mounted capability that facilitates vehicle integration.
The new mounted capability delivers a modular, open architecture that expands client support and provides future extensibility while leveraging the core DAPS GEN II capability. To facilitate use of DAPS GEN II in vehicles, a vehicle interface adapter (VIA) is under development to provide the following capabilities:
Hold the DAPS GEN II device securely in the vehicle, enabling improved inertial performance under threat
Accept and condition power from the vehicle, extending battery life
Extend the number of supported clients, enabling vehicle systems to consume a single assured-PNT feed
Provide RF and data interfaces to anti-jam antennas, enabling tight integration with the antennas, including sharing of electronic warfare situational awareness information
Provide a FLEX-IO port, enabling extensibility by supporting addition of new PNT sensors and simplifying transition of new assured PNT capabilities
JNC 2026 attendees can visit the TRX team in Booth #319 to learn how the DAPS GEN II solution supports dismounted and mounted operations by delivering continuous, assured PNT – even in contested environments.
During the conference, TRX leaders will participate in technical sessions where they will discuss the latest DAPS GEN II innovations and share testing results for delivering assured PNT in both dismounted and mounted situations:
Session C6 (Tuesday, 11:30 a.m.): Speakers from TRX Systems and Combat Ready PNT will present U.S. Army Program of Record: DAPS Gen II Advancements, Interoperability, and Performance. This presentation will review DAPS GEN II innovations that increase resilience to extended-duration threats.
Session C6: TRX Systems is supporting an alternate presentation,U.S. Army Program of Record DAPS Mounted ECP (DME). This presentation will cover the functionality being developed with the VIA and provide results from the development and testing.
42 Technology (42T) and Omnisense have demonstrated a safer autonomous drone landing system when GNSS signals are unreliable.
The system uses a ground-based ultra-wideband (UWB) positioning technology. It was developed by Omnisense through its European Space Agency-supported DroneHome program.
Autonomous landing is a safety-critical phase for drone missions, particularly challenging when GNSS is impaired due to signal obstruction, reflection or interference (near tall buildings, in busy ports, or inside tunnels).
The DroneHome program uses terrestrial radio positioning as a complementary navigation layer within the overall navigation system, so a drone’s position remains stable and predictable even in GNSS-challenged environments. In practice, this means autonomous systems can maintain controlled behavior instead of experiencing sudden navigation failures.
One of the key technical challenges was extending the operational range of UWB positioning to make it viable for autonomous landing. 42T worked closely with Omnisense to design and develop the extended-range RF hardware used in both the ground infrastructure and airborne elements of the system. The front-end design incorporates a UWB system-on-chip with low noise amplification, power amplification, switching, and antenna integration to deliver the required range and performance.
Field trials and simulation-based analysis confirmed that the system maintained stable positioning within a defined envelope during GNSS-degraded operation, enabling reliable autonomous approach and landing.
The results from Omnisense’s DroneHome program are directly relevant across a wide range of applications, including airborne, terrestrial and maritime operations, infrastructure inspection, and autonomous systems operating in GNSS-challenged environments.
DroneHome was a focused development and validation programme exploring extended-range terrestrial positioning for autonomous navigation applications. The project was led by Omnisense in collaboration with Mozaero and supported by ESA under the NAVISP program.
Apogee has been awarded a five-year, $103 million task order to provide positioning, navigation and timing (PNT) support services for the U.S. Department of Defense.
The contract supports modernization, acquisition and sustainment planning across the international PNT enterprise, ensuring resilient and reliable capabilities that underpin critical military operations worldwide.
Under the contract, Apogee will deliver technical expertise and mission support across multiple locations, including Robins Air Force Base, Georgia; Wright-Patterson Air Force Base, Ohio; and Eglin Air Force Base, Florida.
Apogee’s team will contribute to advancing next-generation PNT capabilities, strengthening system performance and supporting the continued evolution of a mission essential to joint and coalition operations.
Apogee is headquartered in Colorado Springs, Colorado, with regional offices nationwide.
The project is framed within the COINCIDENTE Programme, the Spanish Ministry of Defence’s National R&D Plan, which seeks innovative technological solutions of interest for defense. It will also benefit from the support of institutions such as AICIA (Association for Research and Industrial Cooperation of Andalusia, University of Seville) and FADA-CATEC (Advanced Aerospace Technologies Centre).
The main objective of FENIX is the design, development and validation through simulation and flight test campaigns of a technological demonstrator for an autonomous control and coordination system for heterogeneous unmanned aerial vehicle (UAV) swarms.
The system will build on Alpha Unmanned Systems’ existing UAV platforms, as project lead, and on the advanced autopilot technology of UAV Navigation-Grupo Oesía. Building on this foundation, new technologies will be developed to endow the swarm with collective intelligence, in alignment with military doctrine. These technologies will analyze, assess and demonstrate how the use of such systems enhances effectiveness and efficiency in surveillance and reconnaissance tasks in complex and contested environments, while also providing increased robustness.
Key developments and objectives of the project include:
Swarm coordination and planning system: Capability for efficient, real-time replanning in response to unforeseen events.
Cooperative perception system: Integration of multisensor data collected by the different UAVs, enhancing detection accuracy and robustness against occlusions, concealment and adverse weather conditions.
Advanced capabilities for critical missions: Identification and mapping of areas of interest under GNSS signal interference (jamming) or spoofing, as well as in NRBQ (CBRN) threat scenarios, and detection of specific targets in patrol, reconnaissance, target acquisition, and search-and-rescue missions.
The use of a heterogeneous UAV swarm will enable these missions to be carried out more effectively and efficiently, directly enhancing defense operational capabilities. The FENIX system operator will only need to define the mission to be executed by the swarm through a single human–machine interface.
The system will automatically decompose the mission defined by the operator into simple tasks, optimally allocate these tasks to the UAVs within the swarm according to their capabilities and constraints, and generate and assign safe, efficient and physically feasible trajectories for each UAV, while respecting kinematic constraints, energy limitations, communication range constraints, and other operational factors.
The FENIX Project, supported by the advanced intelligence of UAV Navigation-Grupo Oesía’s GNC systems and Alpha Unmanned Systems’ rotary-wing platforms, represents a significant step forward in the use of UAV swarms for military applications. This project provides a robust and efficient tool for inspection and reconnaissance in complex and contested environments.