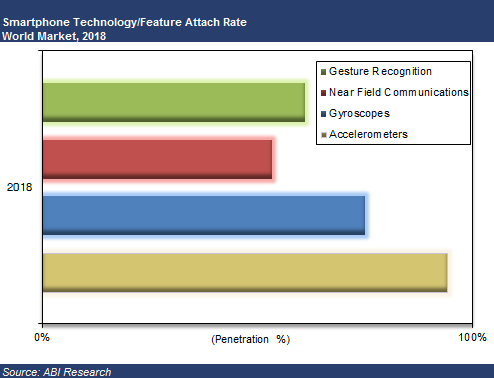
Accelerometers, gyroscopes, near field communications (NFC), and gesture recognition are predicted to be the big winners in mobile devices. These mobile technologies are projected to make the greatest penetration gains over the coming years, according to a recent study by market intelligence firm ABI Research.
“Hands-free operation or gesture recognition is soon going to become a key differentiator in high-end flagship smartphones, media tablets, and smart glasses,” says senior analyst Joshua Flood. “Samsung’s latest Galaxy S4 has already incorporated the technology within its handset and has received significant plaudits for its new innovative user experience. Furthermore, with a host of new smart glass products soon to be released, it is easy to imagine the usefulness of the interface with this product.” In 2013, almost 12% of smartphones shipped will have vision-based gesture recognition capabilities.
Accelerometers and gyroscopes play a crucial role with today’s mobile devices, enabling devices to be more intuitive and take action without a user pressing a button. Simple actions like switching from portrait to landscape when a smartphone is tilted are made possible by including these components. Additionally, the fast growing mobile gaming market is highly dependent upon smartphones including gyroscopes, which enhance gaming experience. Nearly half of the smartphones shipped this year will include these MEMS sensor types.
NFC has been one of the most talked about mobile technologies that has not quite taken off. The technology has primarily been focused around mobile payments; however, mobile OEMs have begun to see other potential capabilities for the technology such as photo-sharing and location information tag points that could open a huge market for advertising and marketing campaigns. Within three years, it is anticipated one in two smartphones shipped will include NFC and have gesture recognition capabilities. Furthermore, accelerometers and gyroscopes will be the “norm” with most smartphones.
Kipo, a GPS mobile location technology company targeting businesses and families, and Tigo Business Guatemala, a telecommunications company, announced their partnership to launch Localizador Tigo. Localizador Tigo is a smart, user-friendly location platform that allows any type of mobile device to connect to the web and trigger actions by predetermined rules, the companies said.
Triggers include location (arrival, exit, stay) and device events such as battery consumption and speed. Rules determine how the event will trigger and the action to take — send an email, post on social networks, mark a calendar, send an SMS, among others. For example, a company can create a rule that notifies a manager when his messenger delivers paperwork. Every time the messenger arrives to a specific location, the manager would receive an automatic email from the software. The sales manager could also create a rule to identify every time the sales team members have less than 10 percent battery. Once a device runs low on battery the manager would receive an automatic SMS to his mobile device.
The technology also lets team members check in and leave comments when they arrive with clients, information that can be seen in real-time on the web alongside a complete suite of reports to make cell phone devices more useful than ever before. The product can work with any mobile device — smartphones will be able to access the service through native applications and feature phones will rely on cell-towers to report location.
Localizador Tigo gives customers full ownership and control over their data and eliminating contracts, giving them the liberty to cancel service at any time. The product will be launched initially for corporate clients of Tigo Business and will be offered to individual customers on a later phase.
“We believe GPS location technology should be smarter and easier to use. This alliance with Tigo Business makes real-time GPS technology accessible to millions of Tigo customers, which is great because we are allowing more people than ever before receive the benefits this technology provides,” said Rodrigo Blanco, founder and co-CEO of Kipo, Inc.
“In Tigo Business we are always looking to provide our clients with the best and the most advanced tools so they can operate efficiently. We had been searching globally for the leading geolocation platform to incorporate to our mobile devices, and to our surprise we found it in a Guatemalan startup. The Kipo platform is functional, targets the needs of Tigo Business clients and is easy to use. The partnership with Kipo is a perfect next step to continue innovating and offering preeminent products to our clients,” said Hector Jimenez, category manager of Tigo Business Guatemala.
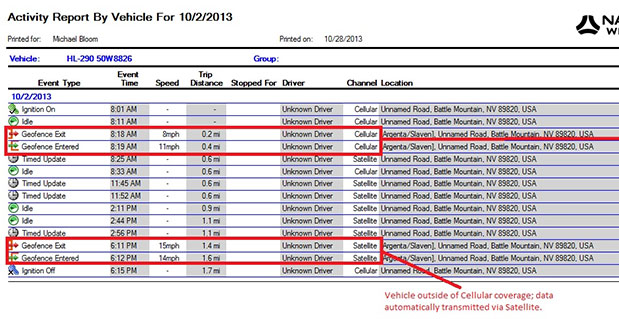
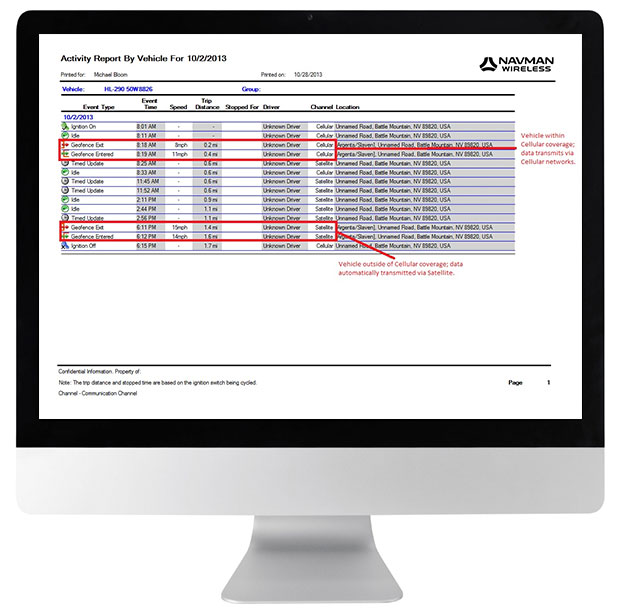
Navman Wireless USA today announced a new satellite communications option for its OnlineAVL2 fleet tracking platform, enabling continuous visibility of both heavy equipment and on-road vehicles even when assets are out of cellular coverage. Designed for construction, surface mining, mining and oil and gas exploration, and other environments with remote location work, the new solution includes the ability to minimize data charges by transmitting only the most critical event information via satellite.
Satellite connectivity is provided via a small modem that plugs into the serial port on Navman Wireless’ Qube on-highway or ruggedized Qtanium off-highway GPS tracking devices. The system automatically switches between cellular and satellite transmission with intelligent least-cost routing, using the global Iridium satellite network when fleet assets move out of cellular range. Benefits include:
Uninterrupted real-time fleet tracking without losing visibility of equipment location and other status information when assets are beyond the reach of cell towers.
Increased employee safety because equipment and vehicles are never out of sight of the fleet tracking system, even if they are working in cellular dead zones.
No missed engine alerts, potentially preventing costly machine repairs and downtime by ensuring that job supervisors are promptly informed when engine, coolant, transmission or air filter sensors connected to GPS tracking devices exceed pre-defined thresholds.
Cost-saving configurability, with the option to limit satellite transmissions to priority events (panic messages, rollover alerts, engine overheating, speed or geofence violations, etc.) and delay the transfer of low-priority event data until cellular coverage is restored.
“If a machine or vehicle in your fleet is operating outside of cell coverage and you have critical communications that need to take place for safety or operations reasons, it can be a problem to wait until the asset gets back into cell range,” said Davis Gammage, VP Product Management, Navman Wireless. “Temporarily switching to satellite communication solves the problem and ensures 100% visibility of your equipment as well as your field staff.”
The new satellite communications option marks the latest expansion of Navman Wireless’ fleet tracking portfolio for the construction, mining, and oil and gas industries. The company’s OnlineAVL2 fleet tracking platform provides location, operations and performance data for both on-highway vehicles and construction heavy equipment from a single interface. The back-end OnlineAVL2 application — delivered under the software-as-a-service model — includes industry-specific reporting such as jobsite utilization reports that break down equipment use by project, facilitate proper cost accounting, reduce writeoffs for unallocated asset hours, and aid in the development of future job bids for construction customers.
There is no doubt about it: drones (also referred to as UAVs and UAS) are a disruptive technology that will significantly impact geospatial professionals not only in the U.S., but around the world. While the mainstream media has mostly pushed the panic button with regards to privacy and drones, you don’t often read a discussion about using drones for mapping.
3D Matterhorn image produced from senseFly’s drone mapping effort.
In Switzerland, where drones weighing less than 30 kg (66 lbs) are legal to operate without a license as long as the operator maintains line of sight, drones mapped the famous Matterhorn Mountain (4,478 meters/14,692 feet) in the Swiss alps, at a resolution of 20 cm. This illustrates the power of drones for 3D mapping, and mapping in general. More efficient and less costly than traditional photogrammetry and airborne lidar, there is no doubt in my mind you will begin working with drones and/or data collected via drones in the near future. Of course, mapping the Matterhorn in 3D at 20-cm resolution is a monumental effort. Even using drones, senseFly reported that it took 11 flights, 5 hours and 40 minutes of flight time, and a total of 2,188 images to process covering 2,800 hectares (~6,920 acres). senseFly didn’t report how many manhours of post-processing the Matterhorn project required, but you know it must be a healthy number. Also, remember that Swiss regulations require that the drone operator must be within “direct eye contact” of the drone at all times, so you can bet the senseFly team had to do some serious mountain climbing.
While generating precise 3D images of a mountain certainly push the limits of drone technology, there are plenty of uses for mapping drones that make a lot of sense and are less complex. The Association for Unmanned Vehicle Systems (AUVSI) reports that in the United States, in the first three years of UAS integration more than 70,000 jobs will be created with an economic impact of $13.6 billion. AUVSI further reports that by 2025, the jobs number will increase to 100,000 jobs, and the economic value to $82 billion. Earlier this year, The Daily Beast reported that agriculture may end up being the largest user of drone technology. Other uses, according to AUVSI, include wildfire mapping, environmental mapping, disaster management, power-line surveys, oil and gas exploration, and general aerial mapping.
So what are we waiting for? Let’s start flying!
Not so fast. In many countries in the world, you can purchase a drone mapping kit and start flying tomorrow. Last month, I witnessed the massive offering of drones at the Intergeo 2013 conference. Copters and fixed-wing aircraft in all shapes and sizes were on display.
However, in the U.S. it’s not so easy. In fact, it’s illegal to operate any drone for mapping unless you have a special permit from the U.S. Federal Aviation Administration (FAA). If you think XYZ Corp. down the road who is using drones for mapping have such a permit, you are wrong. Despite the rumors and gossip you may have heard, and the fact that many companies are using drones for mapping in the U.S., it is not legal, by any stretch of the imagination.
Let’s have a look at what the FAA regulations state.
The FAA divides drone users into two categories: public and civil.
Public Users
Examples of public users by the FAA include the U.S. military and U.S. Customs and Border Protection, as well as other government agencies. Public users must apply for a Certificate of Waiver or Certificate of Authorization (COA) and adhere to the following guidelines:
The operator is required establish the drone’s airworthiness either from FAA certification, a Department of Defense airworthiness statement, or by other means.
The operator must demonstrate that a collision with another aircraft or other airspace user is extremely improbable.
The operator must comply with appropriate cloud and terrain clearance requirements.
The PIC (Pilot in Command), the operator in control of the drone, must maintain minimum qualifications and currency requirements.
An observer must be present to observe the drone and surrounding airspace via line-of-sight on the ground or via chase aircraft.
The PIC and observer must be within, generally speaking, one mile horizontally and 3,000 feet vertically of the drone.
Direct communications between the PIC and Observer must be maintained at all times.
As you imagine, these requirements are not easy to meet and issued to a select few entities. if you want to take a look at the list of Certificates of Authorization issued by the FAA, click here and scroll down to find links to redacted CoA awards that aren’t exempt from the Freedom of Information Act (FOIA).
As of February 15, 2013, the FAA reports there were 347 active COAs.
Civil Users
Civil users include any entity other than Public users, and includes commercial users.
Civil users must obtain an FAA airworthiness certificate just like you would need for any type of aircraft such as an airliner.
The FAA is issuing special airworthiness certificates in the experimental category for testing, market survey, and training of drones. The FAA is very clear that no Certificate of Authorization (CoA) or experimental certificates will be issued to commercial users. In fact, the FAA specifically states that drone users awarded an experimental certificate are not licensed to use drones for “hire or compensation.”
That’s it: short, sweet and to the point.
What about model aircraft users?
Interestingly enough, model aircraft users are allowed to operate drones and have a surprising amount flexibility in doing so. The guidelines for model aircraft users can be found here, but essentially the only concrete rules are that the “hobby” drone cannot exceed 400 feet AGL (above ground level), and that when flying within three miles of an airport, notify the airport operator. That’s it!
Even more interesting is that some hobby-class drones can be very useful for businesses. For example, last month I bought an AR Drone 2.o for US$370. The manufacturer calls it a quadracopter. It operates like a helicopter with four rotor blades. It’s controlled by an app that runs on your smartphone or tablet. I use a Samsung Galaxy III to control it. It’s amazingly easy to control with my smartphone.
AR Drone 2.0
I took the AR Drone 2.0 to the Field Technology Conference to demonstrate it and give conference attendees an idea of what is possible for very little expense. The response from attendees was a little surprising. I didn’t expect geospatial users to appreciate the limited capabilities of the AR Drone 2.0, but attendees spoke of applications like checking birds’ nests for eggs and close-up inspection of structures that aren’t easily accessible. After spending some time flying it, even I began to think about the inspection app and the ability to create video fly-throughs of golf courses, environmental areas, proposed developments, etc. The AR Drone 2.0’s forward-looking, high-definition camera generates stunningly crisp video.
So, that begs the question…
Why can’t a user, following the hobby rules (fly below 400 feet AGL), use the AR Drone 2.0 or any other drone for commercial purposes?
The answer is simple. The FAA rules state that you can use a drone all day long as a hobbyist (following the AC 91-57 rules), but once you start using it for commercial purposes, you are violating the law. Some drone users have said that to skirt the FAA rules, they don’t charge for drone flight time, but just the image processing (data) after the flight. I don’t think this concept has been tested in court yet, but the FAA says this activity is illegal.
“They would be violating FAA rules,” says FAA Spokesperson Alison Duquette. “Please read this policy link. The FAA recognizes that people and companies other than modelers might be flying UAS with the mistaken understanding that they are legally operating under the authority of AC 91-57. AC 91-57 only applies to modelers, and thus specifically excludes its use by persons or companies for business purposes.”
To understand how serious the FAA is about enforcing the no-business-use of hobby rules, I asked the FAA for a list of enforcement citations, cease and desist orders, etc. I was told I had to file a Freedom of Information Act (FOIA) request, which I did, but I’m warned by colleagues not to expect a speedy response.
Check out the following short (three-minute) video news report on a company in Minnesota that was “grounded” by the FAA for flying a drone for commercial use.
The good news is that in January 2012, the U.S. Congress ordered and funded the FAA to figure out how to integrate commercial drone use into the U.S. airspace by the end of 2015. In September 2013, the FAA released a document entitled “UAS Comprehensive Plan” and a document entitled “Integration of Civil Unmanned Aircraft Systems (UAS) in the National Airspace System (NAS) Roadmap“. If you’re really interested in learning more about drone usage in the U.S. and understand the FAA’s perspective, it’s worth a few minutes to scan these documents.
It’s going to be fascinating to see what rules the FAA establishes for commercial drone usage. Don’t be surprised if the PIC (Pilot in Command) must be a licensed pilot, and expect tough restrictions on altitude constraints, flight time, visibility, and control tower communications. I have my private pilot license (although I haven’t flown as PIC in years), and I recall that FAA rules state that you can fly as low as 500 feet AGL over rural areas and 1,000 feet AGL over populated areas. That doesn’t give commercial drone operators a lot of room to work with if they want to map a wide area.
As you would guess, it takes a lot of planning and preparation to put on a technical conference of the scope of GEOINT. So imagine the hand wringing the USGIF staff went through deciding to postpone a conference of about 4,000 attendees and 300 exhibitors because of the untimely government shutdown. There really was no choice, with the majority of federal attendees canceling due to travel restrictions. Without their participation, holding the conference would have been futile. Since the city of Tampa was so accommodating and easy to work with, USGIF rescheduled the conference at the same Tampa venue, April 14-17. They tried their best to minimize scheduling conflicts with other geospatial and USGIF conferences such as the NGA Tech Showcase West (also scheduled for April) and USGIF’s GEOINT Community Week, including Tech Days.
Prior to a major conference, manufacturers send out press releases and invitations to see new products being shown on the exhibit floor. So, although GEOINT 2013 was postponed, I’m still doing my column as a “virtual conference” report. This is a very broad sample of new developments that I received from vendors who planned to be at the October conference, now rescheduled for April.
Thermopylae focuses on commercially-based knowledge-fusion capabilities in the geospatial, cloud, and mobile arenas. It has three solutions: iSpatal, a web-based collaborative framework that leverages Google Earth and Maps in a flexible, task-based approach to solve complex problems; iHarvest, a standards-based enterprise analytic service that organizes, analyzes, and reports activities to enable critical decisions; and Ubiquity, a proprietary platform for creating dynamic, customized, and geocentric native mobile applications. Thermopylae is also bringing back the popular Liquid Galaxy immersive virtual-reality display showcasing Google Glass and Leap integration, showing a unified demonstration of all of its products in the Liquid Galaxy display.
KEYW’s geospatial capability exploits cyberspace as a domain for collecting, processing, and supporting actionable imagery intelligence to the warfighter and for civilian and commercial uses. The company matches aircraft to mission requirements and modify the aircraft with integrated airborne sensor systems for onboard, geospatially referenced digital imagery collection and processing. KEYW planned to showcase its intelligence, surveillance, and reconnaissance (ISR) imaging and mapping; and its Precision Geo-location via handheld, backpack and mobile solutions, along with several other innovations.
Brocade provides networking solutions for government agencies and has expanded its product line with a new compact, fanless switch that simplifies network operations. It’s a secure, enterprise-quality network that is responsive to the complex needs of warfighter and civilian missions. The ICX 6450-C switch is deployable outside the wiring closet, without interfering with other critical activities. Using power over Ethernet, the switch can operate in remote locations, where access to an external power source is limited or not available.
TouchShare has extended its multi-touch solutions for immersive geospatial collaboration to anyone, regardless of location or device, through the TouchShare Mobile Access. The new TouchShare Mobile Access significantly improves teamwide productivity as it gives all collaborators the ability to simultaneously view and contribute to what other team members are seeing in real-time and interact with visual geospatial information (live data, 2D imagery, video, etc.) via any device. This allows all participants to easily and quickly see the big picture for making better decisions faster.
Surrey Satellite Technology provides small satellite solutions, applications, and services for Earth observation, science, technology demonstration, and communications. Since 1981, Surrey has launched 41 satellites as well as provided training and development programs, consultancy services, and mission studies for NASA, the United States Air Force, Los Alamos National Laboratory, and other institutional and commercial customers.
GameSim planned to show off its latest version of Conform, a software product for geospatial visualization. Conform imports, fuses and renders LiDAR content in near real time, while offering a variety of unique abilities, including an instantaneous 3D view of raw source data. Users are able to easily import large amounts of data (such as Shape Files, DTED, GeoTIFFs, LIDAR) and immediately view them in both 2D and 3D displays.
Hyperspectral sensing offers advantages over traditional multispectral imaging with respect to the number of spectral bands being covered. Use enhances target recognition, material identification, and elimination of false positive alarms. Hyperspectral imaging yields much more spectral data than multispectral by producing a continuous spectrum of data representing the chemical composition of objects or spectral “signatures” of everything within the sensor’s field of view. Headwall’s Micro-Hyperspec have been miniaturized and optimized for deployment aboard small, tactical UAVs, including small hand-launched versions.
Orbit Communication Systems provides ground-station solutions for Earth observation and remote-sensing applications. It has a new product family known as the Gaia series that supports a range of antenna sizes. These ground stations offer an ideal combination of high performance in a compact footprint. “With our new Gaia family, Orbit addresses a void in the market, and opens the door to new Earth observation markets that could not afford to purchase legacy ground stations due to their size and cost,” said Ofer Greenberger, Orbit CEO.
The antennas are designed to withstand extreme weather conditions and to handle a broad range of applications, operated anywhere on Earth. The series comprises three different sized antennas: 2.4 meters (7.9 feet); 3.7 meters (12.1 feet); and 4.5 meters (14.7 feet). Each antenna supports X-band or S-Band (both transmit and receive) feeds, as well as a dual-band (S&X) feed.
Astrium’s Street Factory, an advanced 3D urban mapping solution, was awarded “most valuable product in the geo-information field 2012” at the World Geospatial Developers Conference. Building on that success, Astrium planned to demonstrate WorldDEM, a high-resolution elevation data set that covers the Earth’s entire land surface, pole to pole. The accuracy of the German high-resolution radar satellites TerraSAR-X produces data intended to replace SRTM data. It has excellent ground-position accuracy with vertical accuracy of 2m (relative) / 10m (absolute) in a 12m x 12m raster GSD. WorldDEM will be available in 2014 with data less than 2.5 years old. Shown above is a comparison of STRM 90 elevation data compared to WorldDEM.
Ever since my experience supporting Katrina recovery efforts, I’ve be a strong advocate for simple low-tech hard-copy imagery plots overlaid with vector data to support emergency responders. Many times this low-tech embodiment of our high-tech capability suits the needs of first responders better than computer displays. However, paper plots ideally need to be laminated on foam core to be useful in wet and windy environments. Epson has one solution, a plotter that prints on ridged media. Epson engineers developed the SureColor T-Series printers with an all-new design that prints directly on ridged substrates that have a thickness of 1.5 mm. This is especially important to agencies that have a need for fast print output on thick media eliminating the hassle of laminating or marrying to thicker carriers for immediate use. The SureColor T-series also features Epson UltraChrome XD pigment-based ink technology for smudge and water-resistant prints.
This is just a sample of the nearly 300 exhibitors that will be at GEOINT in April. I’ll bet you thought that GEOINT was just imagery and big data. Quite the contrary — it takes a lot diverse players and pieces to build a strong GEOINT capability.
Linx Technologies announces its launch of the high-performance, low-cost RM GPS receiver modules. Using the built-in MediaTek MT3337 chipset, the RM module can simultaneously acquire on 66 channels and track on up to 22 channels, providing standard NMEA data messages through a UART interface. A simple serial command set can be used to configure optional features.
According to the company, the RM receiver module is a cost-effective GPS solution that offers no-frills, basic operation in a compact 15 x 13 millimeter package. The MediaTek MT3337-based RM Series is self-contained and only requires an antenna. It powers up and outputs position data without any software set-up or configuration, making the RM Series easy to integrate, the company said.
The receiver operates down to 3.0 volts and has a low tracking current of 12mA. The module has built-in receiver duty cycling that can be configured to periodically turn off the module for added power savings. This low-power consumption helps maximize runtimes in battery powered applications, such as consumer recreational positioning, marine, location and tracking, cargo tracking, and other asset monitoring systems.
In addition, the available GPS Master Development System connects a RM Series Evaluation Module to a prototyping board with a color display that shows coordinates, a speedometer and compass for mobile evaluation. A USB interface allows simple viewing of satellite data and Internet mapping, as well as custom software application development.
ABI Research forecasts that the global market for Driver Monitoring Systems (DMS) will reach 64.8 million units by the end of 2020 with the majority of shipments being accounted for in vehicles sold in the Asia-Pacific region. These findings are part of ABI Research’s Intelligent Transportation Systems Research Service and includes detailed installed base and forecasts of ADAS systems [advanced driver assistance systems] by regions.
Driver Monitoring Systems were first introduced as far back as 2006 when Toyota launched its innovative Driver Attention Monitor system. Toyota’s system functions by directly monitoring the driver’s face using a discrete in-dash camera and was initially offered as an option in the company’s luxury Lexus models. Other OEMs soon followed suit and announced their own DMS systems which were typically based on monitoring the vehicle rather than the driver’s face.
“DMS systems such as Mercedes-Benz’s ’Attention Assist’ and Volvo and Volkswagen’s ’Driver Alert’ systems were the first ADAS systems to be offered as standard equipment by OEMs, albeit only in a small selection of models,” comments Gareth Owen, principal analyst at ABI Research.
Today, an increasing number of ADAS systems are gradually becoming standard equipment in new cars, particularly in some European and Japanese brands such as Volvo, Mercedes-Benz, Nissan Infiniti, Lexus, and Mazda, and more are being offered as options. Although some of the big U.S. brands offer ADAS features in their European models, they typically do not offer the same features in their U.S. models, although this is beginning to change. Ford is a good example of this with its Ford Focus model.
“Another very observable trend in 2013 is that ADAS features are migrating from the luxury brands into B, C, and even A segment cars. Typically, the focus here is on offering ADAS systems, mostly as options, designed specifically for low-speed urban driving,” adds Owen.
Prices are decreasing, too. For example, the European Ford Focus offers an emergency braking system plus lane departure warning and lane-keep assist, driver alert, and blind spot monitoring as an optional package for £550 ($880) in the UK. Meanwhile, Volkswagen offers its City Emergency Braking System for £225-£405 ($360-$648), depending on model, on its budget A segment Up! car. This uses a laser sensor to detect the risk of an imminent collision and is active at speeds under 30 km/hr (18 mph).
Northrop Grumman Corporation is applying a modular, open architecture approach throughout its product portfolio, allowing for rapid addition of new avionics capabilities for warfighters. Northrop Grumman is already applying the FACE Reference Architecture and interfaces to existing programs and products, including an embedded GPS/inertial navigation system for the Joint Precision Approach and Landing System and a highly adaptable mission equipment package.
Northrop Grumman will leverage the corporation’s expertise in open architecture to implement FACE requirements for both current and future programs, including the Black Hawk H-60L Digital Performance Plan program and Tech-Refresh Mission Computers for the H-1 Upgrade program.
The company plans to participate in demonstrations that will promote maturation of the FACE Reference Architecture by enabling companies to deploy their products in a functional, standardized FACE software environment.
Also, the company’s Transport Services Segment aligns with the FACE Technical Standard requirements and provides a standard interface that allows portable avionics applications to be integrated with a variety of architectures and aviation platforms.
“An open architecture approach is critical to the affordability, innovation and effectiveness of avionics systems,” said Ike Song, vice president of Northrop Grumman’s Situational Awareness Systems business unit. “We are using performance-proven solutions from across our corporation to offer highly flexible, affordable products that support reuse on various platforms.”
Northrop Grumman’s Common Mission Management System (CMMS) establishes a common foundation for affordable control systems to support a variety of the company’s unmanned products. Based upon open architecture standards and standard off-the-shelf commercial hardware and software infrastructures, the Northrop Grumman CMMS product line avoids the need for dedicated, custom-built command and control systems for individual platforms. Also, the Northrop Grumman CMMS product line enables pilots to operate a variety of dissimilar unmanned platforms using the same informational displays and control features, thereby improving mission effectiveness while reducing training requirements.
With its expertise in unmanned aerial systems (UAS), the Northrop Grumman team was instrumental in leading the FACE Consortium’s effort to align with the UAS Control Segment (UCS) information model, establishing a common conceptual data model and metamodel as a framework that defines rules and conventions for developing interoperable software components for unmanned aerial system ground control stations. Further collaboration under the UCS/FACE Memorandum of Agreement is anticipated in aligning the FACE and UCS standards.
Northrop Grumman is a leading global security company providing innovative systems, products and solutions in unmanned systems, cyber, C4ISR, and logistics and modernization to government and commercial customers worldwide.
The annual Intergeo conference and trade fair, this year held October 8–10 in Essen, Germany, elicited three principal observations from the three GPS World staff who attended:
Unmanned aerial vehicles, particularly in micro-form factor, have exploded across multiple sectors of the industrial economy. Emulating GPS — and carrying GPS on board in most cases — UAV has become an enabling technology with far-reaching implications.
Mobile devices bearing GPS/GNSS have likewise exploded, with many more commercial makers and models of handheld survey/mapping devices and location-enabled tablets to be found in Europe than in the United States.
GNSS manufacturers from China are making major efforts to secure distributors and break into the international market. Several had substantial booths, noticeably larger than the fewer, smaller booths present at Intergeo 2012.
Like ION-GNSS+, Intergeo spans an industrial exhibit and a technical conference, but the emphasis in Germany is decidedly on the former.
The technical conference covers key topics from a geoinformational perspective: environment, climate, energy, disaster management, cartography, spatial data, land policy, geographic information systems (GIS), and satellite processes and geodesy. About 140 presentations in 40 subject areas drew 1,300 participants — slightly larger than ION-GNSS+.
But the real story here is the gigantic trade fair for geodesy, geoinformation, and land management, displaying GIS software and services, surveying equipment and accessories, data capture and processing, remote sensing photogrammetry, cartography, and much more — including a dizzying and frequently buzzing array of micro-UAVs.
These face less regulation Europe than in the United States, which has still to come to grips with the technology. Federal Aviation Administration rules are expected in 2015.
The 28,000 square-meter Intergeo exhibition space featured 505 exhibitors from 30 nations and drew an estimated 16,000 attendees from 80 countries — making it between eight and 125 times the size of the ION GNSS+ industry exhibit. Clearly, the German show has a different mission and a different mix of both exhibitors and attendees, spanning different bands of the GNSS application spectrum; and, its orientation is much more commercial.
Exhibitors at the two shows form sort of an old-fashioned Venn diagram: some exclusive to either show and some overlapping, appearing at both. Among the latter group were: JAVAD GNSS, Trimble, Hemisphere GNSS, Leica Geosystems, NovAtel, Septentrio, ComNav Technology, Topcon Positioning Systems, and Fraunhofer Institute.
Among GNSS companies showing in Essen but not in Nashville were Altus Positioning, AllSat GmbH, Carlson Software, CHC Navigation, Forsberg, Fugro Geospatial, and Hi-Target.
A final question proffers itself after three days amid this hubbub: Why is there not a North American show of this nature? The Esri User Conference comes closest, but it is vendor-specific. There would appear to be a niche for a 5,000–10,000 attendee tradeshow in this sector.
GPS World shipped 700 copies of the September issue to Intergeo; by the second morning of the three-day show, nearly all were gone, as attested by this note from our friendly bin stocker. Publisher Alan Cameron, Survey/GIS Editor Eric Gakstatter, and Associate Publisher Steve Copley attended, holding productive meetings with many exhibitors.
The CW46S GPS sensor by NavSync is a fully integrated module that includes a CW25 GPS receiver, DC/DC converter, RS232 or RS422 interface options, and active GPS antenna housed in a small weatherproof (IP67-rated) enclosure.
When mounted with a good sky view, the CW46S receiver can provide high-quality timing and synchronization. The 1 pulse per second (PPS) timing signal can provide accuracies to within 30nS RMS of Coordinated Universal Time (UTC).
The 1PPS is transmitted via RS422 signal format; this two-wire method allows the pulse to be transmitted with cable lengths exceeding 100 meters.
The CW46S utilizes the CW25TIM GPS receiver, which allows the CW46S to act as a complete timing module capable of outputting a GPS-disciplined 10-MHz frequency.
By Miguel Torroja, Steve Malkos, and Christophe Verne
Users of smartphones, tablets, and other devices expect position with the highest level of accuracy, always available, with the least amount of power consumed. One recent improvement fulfilling this demand involves operating-system services for location on smartphones, and the evolution towards lower power solutions.
“Please connect to a charger — The battery is getting low: less than 15 percent remaining.”
Handsets are battery-supplied devices, and a user’s tolerance for features is driven by battery consumption. There are many examples of technologies where users do not run certain hardware or features because it will consume the battery and make the phone useless within a short period of time.
The application processor (AP) of a handset device is very powerful, and is the part that consumes most of the battery life. Today’s smartphone multicore application processor is faster than many desktop computers that are just a few years old. Whatever the application, when it uses the AP, it can draw up to hundreds of milliamperes (mAs).
For the last few years, the trend for GNSS has been host-based positioning. Host-based designs have less logic on the GNSS integrated circuit (IC) and employ the host AP for a portion of the positioning computation. This strategy has three advantages:
Shares memory and code resources with the application processor.
Reduces the cost of the dedicated GNSS hardware.
Sharing the processor makes sense since it is already running.
Traditionally, when the GNSS solution was running, a navigation application that utilized the AP was also running.
However, when we only want to compute GNSS positions in the background, and we do not need a third-party application running on the AP, a host-based IC architecture is not the optimal solution with regard to system power consumption. This article explains some of the technologies used to compute a GNSS position using an ultra-low power (ULP) hybrid solution that combines the classic host-based GNSS architecture with a host-offload architecture that minimizes the use of the AP.
We discuss here two applications that benefit from a host-offload architecture: geofencing and position batching.
We will review the requirements for a platform to support a new hybrid GNSS positioning solution. Different host-offload technologies for geofence, such as GNSS, Wi-Fi, and Cell-ID, will be compared. Broadcom’s ultralow-power host-offload GNSS solution supports any operating system. We focus here on Android’s operating system because it is the most open OS.
Always-on Applications
Geofencing is an application that sends reports or triggers alarms when a predefined area is crossed. For example, users can be alerted to discounts with e-coupons when walking through a mall, or to “don’t forget the milk” — users can set their own reminder notifications based off of location; also, social networking. One example of location-based reminders is through Google Keep, which uses Android’s Geofence APIs on platforms that support hardware geofencing; this application will automatically take advantage of the hardware geofence solution.
Geofencing applications run in the background for long periods of time, and their main task is to compute positions (fixes) without the need of assistance from other applications. An ultra-low-power GNSS position solution, or always-on positioning solution, is desirable for these scenarios. Typical applications require notifications when entering or exiting a geofence area, or require periodic reporting of user positions relative to the fence.
Geofencing is not something new. API support has been provided in mobile OS for many years, but only now can it be used without draining the battery, thanks to this new host-offload architecture.
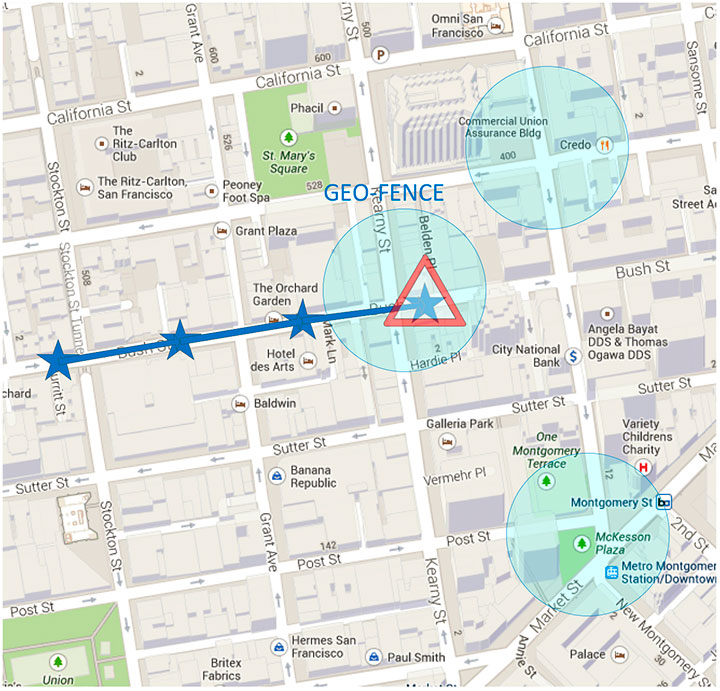
Figure 1 shows a circular geofence boundary and an alarm. In that example, the alarm was triggered when entering the fence.
Figure 1. Alarm when the vehicle enters a geofence area.
Breadcrumbing or position batching pertains to storing of positions, referred to as crumbs, which are accumulated for a certain amount of time and then pushed all at once to the application. Examples would be fleet or asset tracking applications, or people that wants to track their position while they are running.
Currently, Android does not support breadcrumbing as a native feature. There is some ongoing work, and APIs are being defined.
GNSS Positioning Models
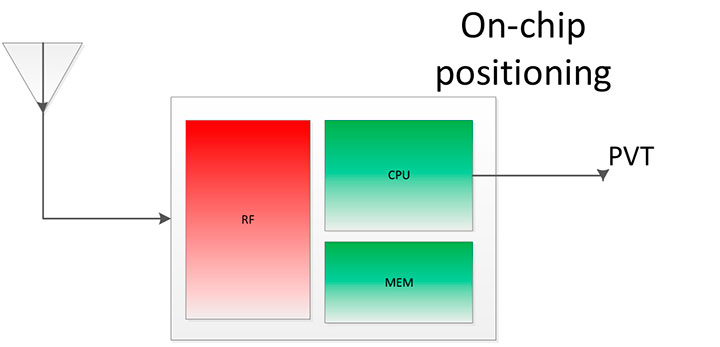
Before smartphones, the dominant GNSS hardware architecture employed a system-on-chip solution. The position/velocity/time (PVT) comes directly from the hardware, and all the computations are done in the GNSS IC.
On-Chip Positioning requires two things: a powerful-enough central processing unit (CPU) and lots of memory. The increase in CPU and memory performance are not free; they translate directly into more power and higher manufacturing costs.
The RF block in Figure 2 is intentionally drawn with a similar size to the CPU and memory, to emphasize the need for higher resources for a complete on-chip solution.
Figure 2. On-chip solution.
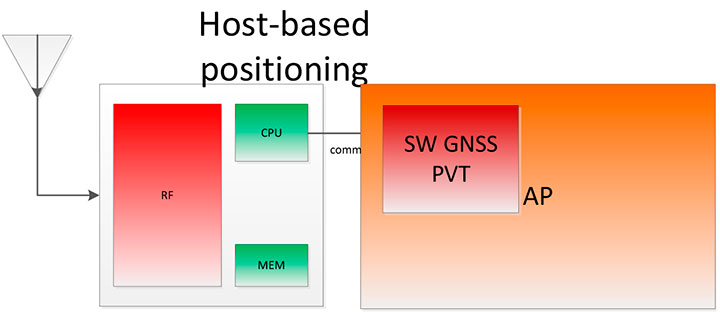
Host-Based Solution. GNSS positioning requires dedicated hardware, complex software, and protocols. This complexity led GNSS providers to move parts of the software out of the IC to the AP.
Using a mobile phone’s AP for position computation is one method of reducing the CPU and memory power footprint from the GNSS IC. At the same time, it also increases the power consumed by the platform needed to compute GNSS position, since part of the computation is not performed on the host-based IC. APs may consume approximately 100 mA just to be operational.
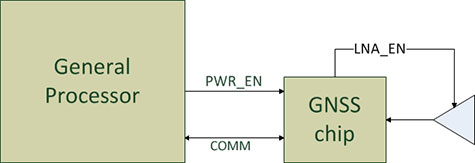
Figure 3 shows a typical configuration with dedicated GNSS hardware and a generic AP. In host-based mode, both the AP and the GNSS IC run in parallel when computing positions. The AP controls the GNSS hardware.
Figure 3. I/O connections in on-host positioning.
With this type of shared architecture, shown in Figure 4, the CPU and the memory on the GNSS IC are reduced, shrinking the size of the chip and reducing power consumed by the chip. In Figure 4 we see that the AP is communicating with the dedicated hardware, and the final PVT is computed by the AP. This solution fits well in many applications, such as navigation, where the AP has to run a mapping application at the same time.
Figure 4. Host-based solution.
Hybrid Positioning. For geofencing, we need a hybrid model, one which keeps GNSS IC complexity similar to the host-based architecture, but also offloads some of the host-based positioning so that the host can go to sleep.
In Broadcom’s hybrid mode, the AP does not need to run when GNSS positions are computed. Broadcom’s hybrid IC does not invoke the host AP often, and thus achieves an even lower power footprint. The CPU on the GNSS IC used for computing position is a dedicated one. It needs to be carefully chosen because it has to be powerful enough to compute positions and be as power efficient as possible. All this is done while keeping the GNSS IC area size in mind, to control cost.
Detailed analysis and steps were considered to ascertain the minimum requirements for the CPU and other resources to best accomplish the on-chip positioning task.
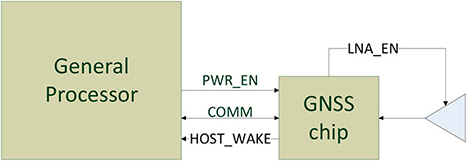
Other considerations: the GNSS IC must be powered even when the AP is suspended, and the GNSS IC must be capable of waking up the AP. Figure 5 shows a possible implementation using a dedicated I/O signal controlled by the IC to wake up the host AP.
Figure 5. I/O connections in hybrid positioning.
With this architecture, the host AP will still be needed to provide some assistance data to the GNSS IC. The assistance provided allows the GNSS IC to not invoke the host AP often and thus achieve an even lower power footprint.
Geofencing Methods
Certain OS application APIs have been supporting geofencing for many years. Currently, we can find geofencing APIs in most of the mobile OSs in the market.
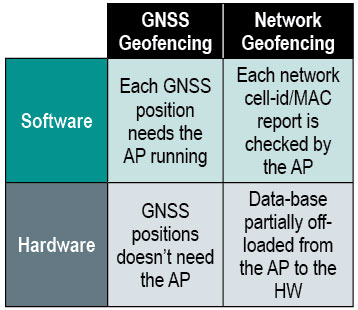
There are four main types of geofencing: GNSS software geofencing, GNSS hardware geofencing, network software geofencing, and network hardware geofencing (Table 1).
Table 1. Geofencing methods.
GNSS Hardware Geofencing. In this method, the one described in detail in this article, the OS initiates a request and offloads the areas of interest to the hardware. After that, the AP can go to sleep and the hardware is responsible for computing positions and checking the areas of interest. This method basically relies on GNSS hardware to compute positions and check the programmed fences.
GNSS Software Geofencing. Here, the OS initiates regular fixes to a host-based GNSS IC design. Then it invokes both the AP and the GNSS IC at the same time to check against the defined fence areas.
Network Geofencing. In this method, the OS requests network IDs from the hardware (that is, baseband modem Cell-ID and Wi-Fi access points). The OS uses different positioning technologies to compute position. This usually requires a connection to a server to retrieve location information about the different IDs. The position is used to check the geofences.
In network hardware geofencing, a set of network IDs is offloaded from the OS to the network hardware ICs. The hardware can poll for these IDs, and wake up the host when found.
Network versus GNSS Geofencing
A good geofencing solution combines both network and GNSS methods because each solution benefits from each other.
GNSS positioning solutions compute positions in open-sky environments with accuracy to a few meters and have worldwide coverage. However, they cannot work in deep indoor spaces.
Network geofencing using cell IDs is quite inaccurate, but works very well indoors. Network geofencing using a Wi-Fi access point provides reasonable accuracy, but location of the access points is not always known and it does not have full coverage.
Geofencing in Android 4.3. The API for applications supports geofencing. Starting from the first version of Android, the application just initiates a proximity alarm and will get an event when its boundaries are crossed. The OS is responsible for notifying the application when such an event occurs, and can use any technologies it sees fit.
The API that applications use is very simple. The monitoring is handled by the OS and is hidden to the application (for example, technologies, periodicity of checks, and accuracies).
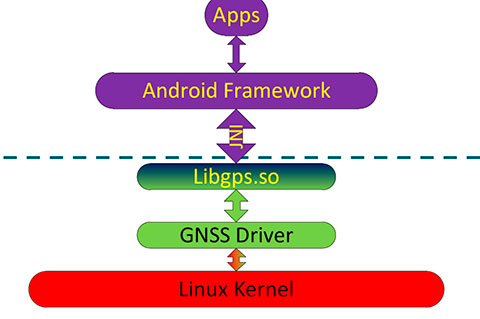
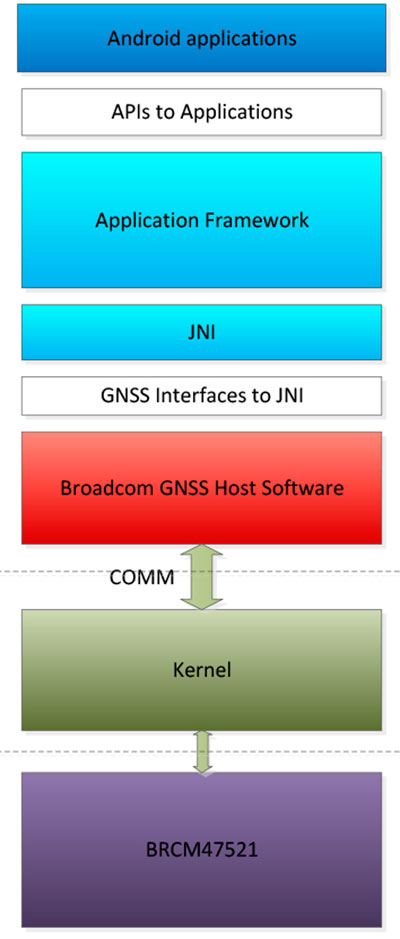
Software Geofence in Android. Software geofencing has been the default method until recently, as there was no native hardware support. In this mode, the host-based GNSS positioning engine is started like any other position request. The Android framework is the one dealing with the monitoring of the geofences, and therefore, the AP must run continuously to handle periodic position checks. That means the software-geofencing logic is mainly in the framework layer of Android (see basic layers diagram shown in Figure 6).
Figure 6. Android framework.
More recent versions of Android dropped the support for software-based geofencing in favor of a host-based GNSS system, likely because of the big impact on the battery. Broadcom developed a low-power GNSS hardware solution for geofencing.
Hardware Geofence in Android. Starting from Android 4.3, a new interface is available to use hardware geofencing. This interface is not visible to the application, and it is only used as a low-level interface. To support the new hardware-geofence interface, the native driver only has to register to a new GNSS interface defined in the native hardware abstraction layer (HAL) of Android.
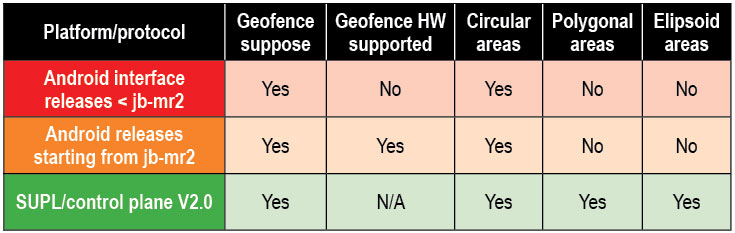
There are other protocols known to support geofencing. Table 2 provides a short list.
Table 2. Geofencing support on different platforms.
Broadcom Hybrid Positioning
Android defines interfaces to the hardware, referred to as the HAL.
GNSS Host Software. GNSS providers need to comply to the HAL interface, which is at the Java native interface (JNI) level. Below the JNI lies the GNSS host software (Figure 7).
For the host-based solution, the GNSS host software handles most of the heavy computing.
For the hybrid solution, the GNSS host software does some of the heavy computing, but positions are computed inside the GNSS IC.
To support this new hybrid solution, two main changes are required compared to the usual host-based solution, as described below.
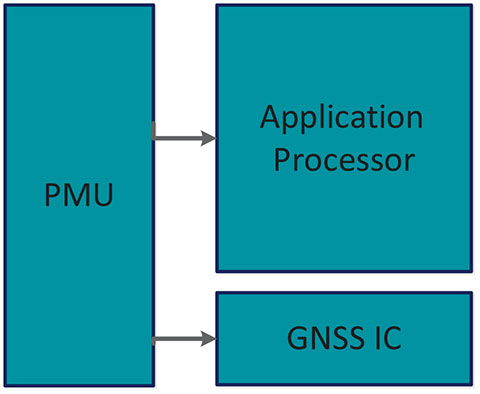
First, the hybrid GNSS IC must be autonomous while the host AP is sleeping. This implies that some power domains are maintained when the GNSS is in use. This typically means at least one of the outputs of the power management unit (PMU) should be dedicated to the GNSS only (Figure 8).
Figure 8. Power domains.
Second, the GNSS IC must be able to wake up the host AP so as to send geofence notifications, or to request assistance data. This is usually done through a dedicated pin.
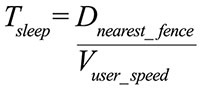
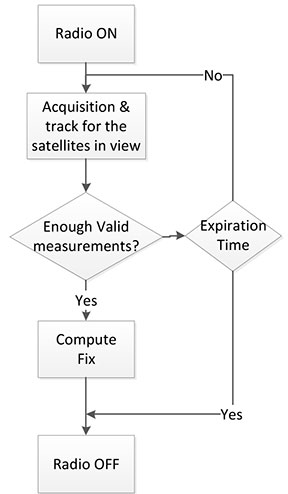
Acquisition and Sleep Period. Most of the power in the GNSS IC is used by the radio and analog part. To reduce power, this part is switched on only during acquisition. As soon as enough measurements are observed, the radio part is switched off while the digital part computes a fix.
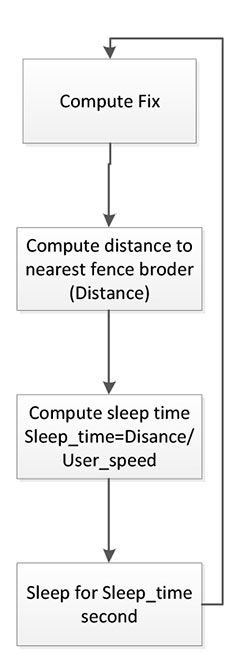
After each computed position, the GNSS IC can go into a deep power-saving mode until the next acquisition. The distance to the closest fence in conjunction with the user speed is used to determine when to compute the next position (Figure 9):
Figure 9. Start fix decision logic.
Once the GNSS IC starts computing positions, the AP can go into sleep mode (Figure 10). Total power per position computed is reduced, and the time between fixes is no longer constant, as shown in Figure 11.
Figure 10. Sleep time between fixes.Figure 11. Duty cycling.
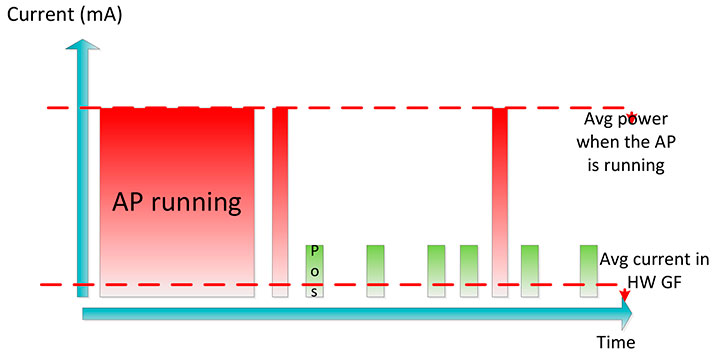
In Figure 12, the lower square-shaped pattern corresponds to a position computation from the hardware GNSS IC. Once we have an alarm, the host has to be woken up and we can see the impact in power in the big peaks after a position is computed.
Figure 12. Power graph.
Alarm Triggering
When a geofence area is crossed, the GNSS IC needs to wake up the AP. This is achieved using a dedicated interrupt pin. After asserting it, an alarm and geofence status is sent to the AP.
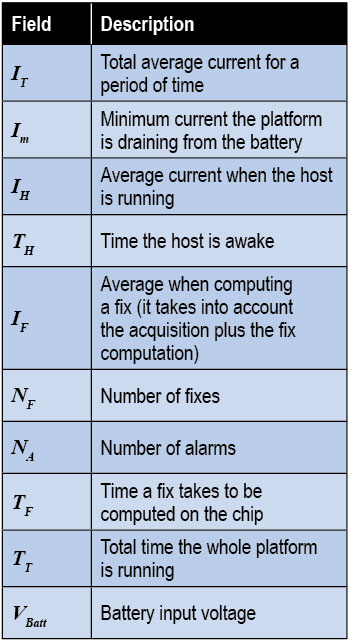
Power Consumption. We calculate the total average current by splitting it into three components, as shown in the following formula:
Some of these parameters are set by the host: for example, how often the fix should be computed. The extra current drained by the GNSS IC is the one defined by
∆I is the change in current drain when computing positions.
We can also express this formula based on the average number of position attempts:
where Tp is the average time between fixes (the time the GNSS IC stays in sleep).
Table 3 illustrates some theoretical ∆I current savings with respect to Tp.
Conclusion
As APs become faster and faster, their power consumption goes up. A novel hybrid GNSS receiver has been presented, which offloads some of the host-based processing into the GNSS hardware, offering ultra-low system power consumption versus the traditional methods. The new hybrid positioning solution is a good approach for always-on applications that need to have location information always available, without requiring the host to be running, as is the case with geofencing and breadcrumbing.
References
We would like to thank Jason Goldberg, Frank van Diggelen, and Manuel del Castillo, all of Broadcom, who reviewed this article and spent many hours with us discussing the topics point by point.
Miguel Torroja is a principal software developer at Broadcom. He has an M.Sc. in electrical engineering from Ramon Llull University, Barcelona. Since 2011, he has been working on the design and development of algorithms for optimizing power consumption in GNSS host-offload solutions.
Steve Malkos is a senior program manager at Broadcom. He has a B.S. in computer science from Purdue University. He has been active in the development of A-GNSS technologies such as hybrid location services, long-term predicted orbits (LTO), Broadcom’s worldwide reference network (WWRN), and secure user-plane location (SUPL). He has five patents issued and 16 pending.
Christophe Verne is a manager of software engineering at Broadcom. He has an M.S. in electrical engineering from Ecole Centrale, Paris. He has been involved in the development of GNSS and A-GNSS technologies at EADS, Sagem, Global Locate, and Broadcom, where he has been working on low-power host-offload positioning.
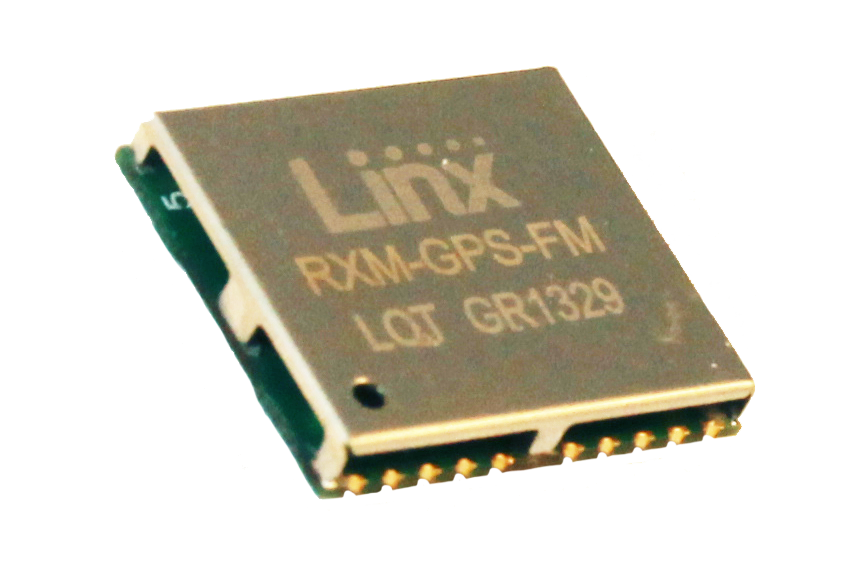
Linx Technologies announces its launch of the self-contained, high-performance FM GPS receiver modules. At 15 x 13 millimeters in size, the MediaTek MT3339-based FM Series gives the module fast lock times and high position accuracy even at low signal levels, the company said.
The module’s very low power consumption helps maximize run times in battery powered applications, such as positioning and navigation, location tracking, marine, and asset management, according to Linx Technologies.
Using the built-in MediaTek MT3339 chipset, The FM module can simultaneously acquire on 66 channels and track on up to 22 channels, providing standard NMEA data messages through a UART interface. A simple serial command set can be used to configure optional features.
The GPS receiver is completely self-contained and only requires an antenna. It powers up and outputs position data without any software set-up or configuration. As a result, the FM Series is easy to integrate, the company said.
With built-in hybrid ephemeris prediction technology, the FM Series predicts satellite positions for up to three days and delivers start times of less than 15 seconds under most conditions.
In addition, the available GPS Master Development System connects a FM Series Evaluation Module to a prototyping board with a color display that shows coordinates, speedometer and compass for mobile evaluation. A USB interface allows simple viewing of satellite data and Internet mapping, as well as custom software application development.