Raytheon Company has signed a strategic agreement with AirMap, an airspace intelligence platform for drones, to collaborate on projects to safely integrate unmanned aerial systems (UAS) into the national airspace system. This will help unlock the positive economic and social benefits of expanded commercial drone operations, the companies said.
Unmanned air traffic control advances will unlock safe, efficient and scalable drone operations with a myriad of economic and social benefits.
“AirMap is ushering in a new era in drone aviation,” said Matt Gilligan, vice president of Raytheon’s Intelligence, Information and Services business. “Drones must safely operate in an already complex ecosystem, which is where our experience matters.”
The agreement combines the two companies’ expertise:
Raytheon’s Standard Terminal Automation Replacement System, or STARS, is used by air traffic controllers across the U.S. to provide safe and efficient aircraft spacing and sequencing guidance for more than 40,000 departing and arriving aircraft daily at both civilian and military airports.
AirMap is a global provider of airspace intelligence for UAS operations, with over 250,000 registered users. In 2018, U.S. registered commercial drone pilots used AirMap to request more than 45,000 automated authorizations to fly in controlled airspace.
“Raytheon technology has helped safely and effectively manage airspace in the most complex, dense controlled airspace in the world for decades,” said Ben Marcus, AirMap co-founder and chairman. “They are an ideal partner to join AirMap on the path toward enabling safe, efficient, and scalable drone operations in U.S. low-altitude airspace between 0 and 400 feet.”
The two companies are working toward an integrated demonstration that will showcase how AirMap’s unmanned aircraft traffic management platform can increase air traffic controllers’ awareness of potential conflict between drones and manned aircraft near airports to ensure overall safety of the airspace.
Incorporating precise and consistent absolute location information is an essential component of enabling advanced driver assistance (ADAS) and autonomous driving (AD) technology for vehicles.
To help meet this need, Trimble recently released Trimble RTX Auto. The Trimble RTX Auto correction service provides a precise point position (PPP) solution that can be used to correct the position of any auto grade GNSS chipset. RTX Auto works in parallel with other on-vehicle sensors to deliver a positioning solution that satisfies ADAS and AD requirements.
Absolute position contributes to many features:
Lane centering. Systems designed to keep a car centered in a lane, relieving the driver of the task of steering, is often achieved with cameras and absolute position data. Absolute position can be used when lines disappear, or weather prevents them from being seen.
Map aiding. a combination of precise map and location data helps to navigate junctions, lane changes, roundabouts or intersections where lane information is essential to safe driving.
Prediction of future road structure. Both allow a vehicle to begin slowing in advance of a bend in the road and to avoid harsh braking that would happen if the system only relied on short range sensors.
Adhering to the speed limit. This helps drivers anticipate changes in speed limits when a downpour prevents cameras from seeing the speed limit signs or when they might be obscured by natural surroundings or another vehicle.
RTX Auto is both Automotive Safety Integrity Level (ASIL) and Automotive Software Process Improvement and Capability Determination (ASPICE) certified. These certifications validate that Trimble RTX Auto meets functional safety requirements for ADAS and autonomous applications in the auto industry.
Super Cruising. Trimble is on the road today providing RTX-based absolute positioning within General Motors’ Super Cruise driver assistance feature, a hands-free driving system for the freeway. For more information on Super Cruise, visit www.cadillac.com/world-of-cadillac/innovation/super-cruise.
Photo: Ministry of Defense of the Russian Federation
Israeli security officials publicly accused Russia of disrupting and spoofing GPS signal reception in Israeli airspace throughout the month of June. The electronic warfare at which Russia is known to be adept was reportedly traced to the Khmeimim Air Base in Syria, where Russia maintains and actively flies a large number of warplanes on behalf of the Syrian government. The base is approximately about 350 kilometers (217 miles) north of Ben Gurion, so if the accusation is true, fairly powerful equipment is behind the attack.
Both Israeli and other-nationality airline pilots have reported interruptions in GPS reception during take-off and landing at Tel Aviv’s Ben Gurion International Airport. The Israeli Airline Pilots Association labeled the interruptions a spoofing attack, causing airplane receivers to report false positions.
The International Federation of Air Line Pilots’ Associations issued a Notice to Airmen: “GPS signal loss affects RNAV arrivals and departures and may create numerous alerts for systems that rely on internal position accuracy. Flight Crews should be aware of the potential risk, avoid distractions, and plan for alternative procedures as necessary.”
Pilots have since for the most part relied on Instrument Landing System, a precision runway approach aid based on two radio beams which together with both vertical and horizontal guidance during an approach to land at Ben Gurion International Airport.
The Israeli Airports Authority stated that the GPS attacks affected only airborne crews and not terrestrial navigation systems, and that they occur only during daytime.
The Russian ambassador to Israel has denied the accusations.
In April, a U.S. research institute, the Center for Advanced Defense Studies, documented more than 10,000 separate incidents of GPS disruption on Russian soil, in northern Scandinavia and in the Middle East between February 2016 and November 2018. It said Russia was “pioneering” the technique to “protect and promote its strategic interests.” GPS World summarized the report here, stating that “The Russian Federation is growing and actively nurturing a comparative advantage in the targeted use and development of GNSS spoofing capabilities to achieve tactical and strategic objectives at home and abroad.”
Tie-in with Iran Tensions. Meanwhile the Helsinki Times reported that researchers at the Finnish Geodetic Institute noticed unusual power variations in the GPS signal on June 20 and 21: “an increase of up to 10dBHz in the carrier-to-noise ratio readings comparing with the usual daily values.” Normally the variations are between -0.5 and 0.5 dBHz.
The same findings were communicated to the research community by Peter Steigenberger, senior scientist at the German Aerospace Center, DLR:
“Based on carrier-to-noise density ratio observations (C/N0) of IGS receivers, we observed global flex power operations on June 20 and 21, 2019. Flex power started subsequently for all healthy Block IIR-M and IIF satellites on June 20 between 15:18 and 17:49 UTC. C/N0 of the P(Y)-code tracking increased by roughly 10 dB for all healthy Block IIR-M and IIF satellites whereas C/N0 of the C/A-code decreased by about 2-3 dB for the healthy IIR-M satellites only. The changes in power levels are similar to flex power mode III discussed in “Steigenberger P, Thölert S, Montenbruck O. (2019) Flex power on GPS Block IIR-M and IIF, GPS Solutions, doi:10.1007/s10291-018-0797-8″. All satellites returned to normal power levels on June 21 between 6:00 and 10:00 UTC.”
On June 20, a US military drone was downed down by Iranian missiles. On June 21 President Trump tweeted that he had called off a dawn attack on Iran that day.
Whether the spoofing affecting Israeli airspace has any connection to building tensions 1,500 kilometers to the east is unknown.
Autopilot Navigation Steers Car off Road, Research from Regulus Cyber Shows
The Tesla Model S and Model 3 — electric cars built for speed and safety — are vulnerable to cyberattacks aimed at their navigation systems, according to recent research from Regulus Cyber.
During a test drive using Tesla’s Navigate on Autopilot feature, a staged attack caused the car to suddenly slow down and unexpectedly veer off the main road. Regulus Cyber, the first company to deal with smart-sensor security across a wide range of applications including automotive, mobile, and critical infrastructure, initially discovered the Tesla vulnerability during its ongoing study of the threat that easily accessible spoofing technology poses to GNSS receivers.
The Regulus Cyber researchers found that spoofing attacks on the Tesla GNSS receiver could easily be carried out wirelessly and remotely, exploiting security vulnerabilities in mission-critical telematics, sensor fusion, and navigation capabilities.
Regulus Cyber experts traveled to Europe last week to test-drive the Tesla Model 3 using Navigate on Autopilot. An active guidance feature for its Enhanced Autopilot platform, it’s meant to make following the route to a destination easier, which includes suggesting and making lane changes and taking interchange exits, all with driver supervision.
While it initially required drivers to confirm lane changes using the turn signals before the car moved into an adjacent lane, current versions of Navigate on Autopilot allow drivers to waive the confirmation requirement if they choose, meaning the car can activate the turn signal and start turning on its own. Tesla emphasizes that “in both of these scenarios until truly driverless cars are validated and approved by regulators, drivers are responsible for and must remain ready to take manual control of their car at all times.”
Designed to reveal how the semi-autonomous Model S and Model 3 would react to a spoofing attack, the Regulus Cyber test began with the car driving normally and the autopilot navigation feature activated, maintaining a constant speed and position in the middle of the lane.
Although the car was three miles away from the planned exit when the spoofing attack began, the car reacted as if the exit was just 500 feet away — abruptly slowing down, activating the right turn signal, and making a sharp turn off the main road. The driver immediately took manual control but couldn’t stop the car from leaving the road.
The testing revealed another unexpected finding that significantly amplified the threat—a link between the car’s navigation and air suspension systems. This resulted in the height of the car changing unexpectedly while moving because the suspension system “thought” it was driving through various locations during the test, either on smooth roadways, when the car was lowered for greater aerodynamics, or “off-road” streets, which would activate the car elevating its undercarriage to avoid any obstacles on the road.
Yoav Zangvil, Regulus Cyber CTO and co-founder, explains that GNSS spoofing is a growing threat to ADAS and autonomous vehicles. “Until now, awareness of cybersecurity issues with GNSS and sensors has been limited in the automotive industry. But as dependency on GNSS is on the rise, there’s a real need to bridge the gap between its tremendous inherent benefits and its potential hazards. It’s crucial today for the automotive industry to adopt a proactive approach towards cybersecurity.”
The Regulus Cyber testing is designed to assess the impact of spoofing with low-cost, open source hardware and software, the same kind of technology that is accessible to anyone via e-commerce websites and open source projects on GitHub. Taking control of Tesla’s GPS with off-the-shelf tools took less than one minute.
The researchers were able to remotely affect various aspects of the driving experience, including navigation, mapping, power calculations, and the suspension system. Under attack, the GNSS system displayed incorrect positions on the maps, making it impossible to plot an accurate route to the destination.
Tesla’s response on Model S
Prior to the Model 3 road test, Regulus Cyber provided its Model S research results to the Tesla Vulnerability Reporting Team, which responded with the following points at that time:
Any product or service that uses the public GPS broadcast system can be affected by GPS spoofing, which is why this kind of attack is considered a federal crime. Even though this research doesn’t demonstrate any Tesla-specific vulnerabilities, that hasn’t stopped us from taking steps to introduce safeguards in the future which we believe will make our products more secure against these kinds of attacks.
The effect of GPS spoofing on Tesla cars is minimal and does not pose a safety risk, given that it would at most slightly raise or lower the vehicle’s air suspension system, which is not unsafe to do during regular driving or potentially route a driver to an incorrect location during manual driving.
While these researchers did not test the effects of GPS spoofing when Autopilot or Navigate on Autopilot was in use, we know that drivers using those features must still be responsible for the car at all times and can easily override Autopilot and Navigate on Autopilot at any time by using the steering wheel or brakes, and should always be prepared to do so.
“This is a distressing answer by a car manufacturer that is the self-proclaimed leader in the autonomous vehicle race,” Zangvil commented. “As drivers and safety/security experts, we’re not comforted by vague hints towards future safeguards and statements that dismiss the threats of GPS attacks.”
He offers the following counterpoints in response:
Attacks against any GPS system are indeed considered a crime because their effects are dangerous, as we’ve shown, yet the same devices we used to simulate the attacks are legally accessible to any person, online via e-commerce sites.
Taking steps to “introduce safeguards for the future” indicates that spoofing is, in fact, a major issue for Tesla, which relies heavily on GNSS.
In the case of cars, a spoofing attack is confusing in the best case, and a threat to safety in more severe scenarios.
The more GPS data is leveraged in automated driver assistance systems, the stronger and more unpredictable the effects of spoofing becomes.
The fact that spoofing causes unforeseen results like unintentional acceleration and deceleration, as we’ve shown, clearly demonstrates that GNSS spoofing raises a safety issue that must be addressed.
In addition, the spoofing attack made the car engage in a physical maneuver off the road, providing a dire glimpse into the troubled future of autonomous cars that would have to rely on unsecure GNSS for navigation and decision-making.
Given that the trust of the public still has to be earned as the automotive industry moves towards autonomy, the leading players are accountable for a responsible deployment of new technology.
As Tesla clearly stated, drivers are responsible for overriding autopilot under a spoofing attack, so it appears its auto pilot system can’t be trusted to function safely under a spoofing attack.
Because every GNSS/GPS broadcast system can be affected by GNSS/GPS spoofing, the issue is everyone’s problem and shouldn’t be ignored; furthermore, governments and regulators that have a mandate to protect the public’s safety must engage in proactive measures to ensure only safe GNSS receivers are used in cars.
“According to Tesla, they’ll soon be releasing completely autonomous cars utilizing GNSS, which means that, in theory, an attacker could remotely control the car’s route planning and navigation,” Zangvil said. “We’re obligated to ask what steps they’re taking to address this threat, and whether new safeguards will be implemented in its next generation of entirely autonomous cars.”
Although Regulus Cyber researchers tested only the Model S and Model 3, they concluded that the “disturbing vulnerability” of Tesla’s GNSS system is most likely company-wide, as the same chipsets are used across the Tesla fleet.
“Just a few months ago we saw that during a spoofing incident in a car show in Geneva, seven different car manufacturers complained that their cars were being spoofed. This incident proves that many other automotive companies that are working on the next generation of autonomous cars are also vulnerable to these attacks. As an industry, to win public trust and succeed, every car manufacturer should be proactive and prepare against these threats,” Zangvil said.
New GLONASS-K2 satellites will improve the accuracy of Russia’s satellite navigation system from 3-5 meters to less than 1 meter, said Chief Designer Mikhail Korablyov of the Joint Stock Company GLONASS, operator of the ERA-GLONASS traffic accident emergency response system, at a transport conference in Moscow in late May.
Russia plans to launch the first K2 satellite in late 2019 or early 2020. By 2030 the GLONASS constellation will consist wholly of K2 space vehicles, 24 of them.
The improved accuracy will better determine vehicle location in analyzing a traffic accident, according to Korablyov. It will not, however, be sufficient for lane-keeping and other advanced driver assistance systems, nor for more stringent autonomous driving requirements, at least according to emerging Western standards.
“There are also tasks linked with the country’s defense, there are special precision weapons, the requirements for which already make up less than a meter,” Korablyov added.
Yury Urlichich, First Deputy Director General, Roscosmos. (Photo: Roscosmos)
Numbers. Writing in the December 2018 issue of GPS World, Yury Urlichich, First Deputy Director General, Roscosmos State Space Corporation, gave a somewhat more precise figure for the new accuracy to be achieved via the K2 generation. “The new signals will allow lowering the hardware-dependent SC-user ranging error by an order of magnitude, reducing the influence of signal reflections from buildings, constructions and landscape (multipath effect), thus enabling their effective use for high-precision navigation with real-time errors below 0.1 m.
“This SC will enable navigation not only using legacy FDMA signals available for users for more than 35 years, but simultaneously with a full row of CDMA signals in all GLONASS frequency bands: L1, L2 and L3.”
Later in the same piece, Urlichich wrote “Mission Definition Requirements for Glonass-K2 define user range error to be 0.3 m, qualitatively improving GLONASS user performance.”
The new K2 satellite will transmit nine navigation signals and will weigh about 1,800 kg, twice as much the latest GLONASS-K generation, known as K1. Of the 24 currently orbiting operational satellites, only two are K1 space vehicles. The other 22 are older GLONASS-M satellites.
A Shock to the System. A bolt of lightning struck the rocket launcher for the latest GLONASS-M satellite to rise, on May 27. It did not adversely affect the bird’s journey to space, and all systems were found to be functioning properly once the satellite was released into preliminary orbit, Russian space officials said.
The Allystar INS Platform — the company’s latest technology — is a dual-antenna, multi-frequency, multi-GNSS inertial navigation system (INS) that delivers accurate and reliable position, velocity and orientation, the company said.
It is designed for a wide range of autonomous vehicle applications under the most demanding conditions.
The Allystar INS Platform combines high-grade, six-axis, temperature-calibrated accelerometers and gyroscopes with a multi-frequency, multi-GNSS engine, the HD9300 series. HD9300 is a dual-antenna chip-grade real-time kinematic (RTK) GNSS receiver for accurate positioning and heading.
GNSS-aided inertial navigation systems are widely used in autonomous vehicles. However, high-accuracy multi-frequency multi-GNSS receivers are usually too expensive for mass-market applications. The Allystar HD9300 series is a mass-market multi-band chip-grade receiver that concurrently support all civil bands in all GNSS constellations (GPS/QZS L1&L2&L5&L6, BDS B1&B2&B3, GAL E1&E5, GLO L1OF/L2OF) with an integrated RTK engine to achieve centimeter-level accuracy.
The Allystar INS platform contains an on-board sensor-fusion filter, navigation and calibration algorithms for different dynamic motions of land vehicles. Key features include:
multi-band multi-GNSS chip-grade receiver
dual antennas
integrated RTK engine (up to 2 centimeters)
100-hz update rate
OBD data adapter.
Allystar OBD Data Adaptor V1. (Photo: Allystar)
The Allystar OBD Data Adapter (v1.0) enables users to read and monitor various sensors built into cars, obtaining the real-time vehicle speed and gear signals from the OBD interface, and then output AT commands by serial port or SPI. When connected to the Allystar RTK INS platform, the adapter allows for outstanding navigation accuracy, especially in urban areas, helping to increase accuracy and reduce position drift.
An evaluation kit — including platform board, antenna and OBD adaptor — will be available in August.
STMicroelectronics has grown its GNSS product offering with the Teseo-LIV3R ROM-based module. The module provides ST’s full GNSS algorithm capability for cost-conscious tracking and navigation devices.
ST’s new GNSS module provides odometer functionality with three trip counters and reached-distance alert, along with geofencing capabilities with up to eight configurable circles and crossing-circles alarm. Support for real-time assisted GNSS with free server access ensures uninterrupted positioning data for dependable navigation.
Simultaneous tracking of GPS, GLONASS, BeiDou and QZSS constellations, with satellite-based augmentation system (S-BAS) and Radio Technical Commission for Maritime Services (RTCM) V3.1 differential positioning ensures excellent accuracy to within 1.5 meters (50% circular error probability, CEP).
Tracking sensitivity of -163 dBm and time-to-first-fix faster than one second ensure high performance for demanding applications. The module is easy to use and responds to proprietary National Marine Electronics Association (NMEA) commands.
With scalable power consumption according to accuracy, average current, and frequency of fixes, a sub-15µA standby mode with RTC backup, and support for multiple low-power modes, Teseo-LIV3R is an ideal choice for battery-sensitive applications. The low-power modes include continuous-fix with adaptive and power-saving cycled modes, periodic-fix with GPS only, and fix-on-demand with the device in permanent standby.
To simplify and accelerate new-product development, the module is FCC certified and is supported by the STM32 Open Development Environment. STM32 applications for advanced geolocation, smart tracking, and server-assisted GNSS are available, while the EVB-LIV3x evaluation board and X-NUCLEO-GNSS1A1 expansion board provide a head-start with hardware. The Teseo Suite PC tool helps easily configure settings and fine-tune performance. Developers can also join the ST GNSS community to share information and increase their understanding of the field.
The Teseo-LIV3R is in volume production. The 9.7mm x 10.1mm LCC18 module is priced from $7.3 for orders of 1,000 pieces.
Orolia’s Kannad Ultima-S emergency locator uses the Galileo Return Link Service. (Photo: Orolia)
Orolia is introducing a new product for commercial aircraft safety, the Kannad Ultima-S emergency locator transmitter (ELT).
The Kannad Ultima-S is designed to be installed in the cabin of commercial aircraft or in its life raft. It is capable of notifying the crew about the launch of a search-and-rescue operation via Galileo Return Link Service (RLS).
For passengers, installation of the Kannad Ultima-S means their flight can located accurately, with rescue following if an aircraft evacuation is needed.
Orolia’s Kannad Ultima-S ELT was developed under a two-year contract through the European GNSS Agency’s Tauceti Project. Orolia says this is the first beacon to use the Galileo RLS.
Other key features include:
Certified to the new lithium battery regulations to avoid the risk of battery fires.
A multi-GNSS receiver to accept multiple signals such as GPS and Galileo to detect the aircraft’s
location faster and deploy rescue teams sooner than before.
Dual activation modes: manually or automatically upon contact with water.
An RLS option to notify the crew that the distress signal has been received and help is on the way (available on Galileo).
Multiple configurations available to install in aircraft cabins and life rafts. With a rugged, compact, and easy-to-install form factor, both versions can be installed through a carry-off bag or a mounting bracket and require little storage room.
Orolia’s Kannad Ultima-S meets new and evolving EASA/FAA requirements related to ELTs and non-rechargeable lithium batteries documented under the RTCA DO-227A standard.
“Orolia is dedicated to making air travel even safer than it is today with resilient positioning and aircraft location technology, featuring automatic, manual and remote activation modes to provide a complete ELT portfolio,” said Christian Belleux, Aviation Product Line director at Orolia. “We are excited to present aircraft operators with an affordable, reliable and state-of-the-art ELT solution for cabin modifications or linefit installations.”
The new ELT benefits from the proven Cospas Sarsat infrastructure, which is being upgraded to provide highly accurate location data and nearly real-time reporting to search-and-rescue operators through global coverage.
Kannad Ultima-S survival distress beacons complement Orolia’s Ultima family of next-generation ELTs, following the company announcement of the Global Aeronautical Distress and Safety System (GADSS)-compliant fixed Ultima-DT. Orolia provides aircraft manufacturers and operators with a complete solution for every ELT application.
Orolia will exhibit at the Paris Air Show June 17-20, Hall 2B booth E32, where both new ELTs will be displayed for the first time.
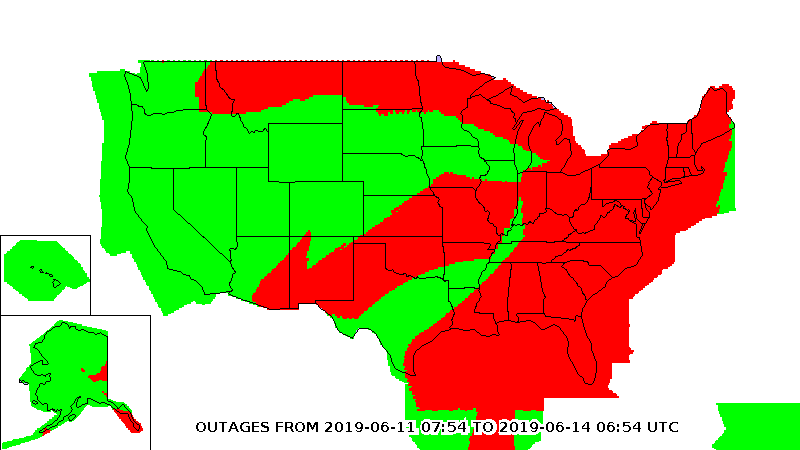
ADS-B transponder problems on some aircraft stem from a bad update to a large class of aviation receivers, according to a blog on the Resilient Navigation and Timing Foundation website. The Air Traffic Control System Command Center issued a blanket waiver on June 9 for all flights having GPS/ADS-B issues with their transponders.
According to various sources, the disruption briefly grounded entire fleets of regional jets. The resulting delays and cancellations rippled through the system.
On June 9, the FAA published a map purporting to show an area of GPS signal degradation in the United States. However, the disruption appears to affect only certain Collins Aerospace (formerly Rockwell Collins) GPS receivers, according to AIN Online.
Collins Aerospace confirmed to AIN, “We identified a technical issue with our recently released GPS product(s) impacting availability, and have since determined the root cause and the resolution. We are engaging with our customers to ensure continued safe operational capability.”
The affected GPS receivers are GPS-4000S part number 822-2189-100 and GLU-2100 part number 822-2532-100. It appears that all aircraft worldwide these receives are not able to locate satellite position signals.
“The absence of reports of problems from other modes of transportation and other industries certainly seems to justify refocusing from GPS signals to receivers as the root cause….” said the RNTF blog. “This is a good reminder for all that great signals in space are just one part of a ‘gold standard’ system. We also need unobstructed spectrum, great receiving equipment, and more than one source of great signals.”
The RealSense camera uses two fisheye lenses and an IMU to construct location awareness. (Photo: Intel)
The Intel RealSense Tracking Camera T265, designed for positioning and maneuvering mobile robots and other portable systems, includes an inertial measurement unit (IMU) that enables developers to create solutions with advanced depth-sensing and tracking capabilities. Intel introduced the camera in Q1 of 2019. An earlier model, the D435i, also includes an IMU but is a depth camera, not a tracking camera.
As robots, drones and other autonomous mobile devices must — eventually — interact independently and intelligently with their environments, they must track their locations as they move, navigating unfamiliar spaces while discovering, monitoring and avoiding still and moving obstacles in real time.
Block diagram of camera components. (Image: Intel)
Moving toward that goal, the T265 includes two fisheye lens sensors, an IMU and an Intel Movidius Myriad 2 video processing unit (VPU), a system-on-chip component for image processing and computer vision at very high performance per watt.
Vision-based simultaneous localization and mapping (V‑SLAM) algorithms run directly on the VPU with very low latency. The T265 has demonstrated less than 1% closed-loop drift under intended use conditions. It also offers sub 6 ms latency between movement and reflection of movement in the pose.
The RealSense device measures 1 x 0.5 x 4 inches (108 mm x 24.5 mm x 12.5 mm), weighs around two ounces (55 g), and draws 1.5 watts to operate the entire system, including the cameras, IMU and VPU. Its spatial sensing and tracking capabilities are based on technology developed by RealityCap, acquired by Intel in 2015.
The camera performs inside-out tracking: it does not depend on external sensors to understand its environment. Tracking is based on information gathered from the two fisheye cameras, each with a 163-degree range of view (±5 degrees) and capturing images at 30 frames per second. The wide field of view from each sensor keeps points of reference visible to the system for a relatively long time, even if moving quickly.
Visual-Inertial Odometry. A key strength of visual-inertial odometry is that the sensors complement each other. The images from the camera are supplemented by data from the onboard IMU, which includes a gyroscope and accelerometer. The aggregated data from these sensors is fed into the SLAM algorithms.
The algorithm identifies sets of salient features in the environment, such as a corner of a room or object that can be recognized over time to infer the device’s changing position relative to those points.
The visual information prevents long-term drift from the inertial that degrades position accuracy. The IMU operates at a higher frequency than the cameras, allowing for quicker response and recognition by the algorithm to changes in the device’s position. A map of visual features and their positions is built up over time. In re-localization, the camera uses the features it has seen before to recognize when it has returned to a familiar place. The camera can locate its point of origin with an error margin of less than one percent.
Drone testing demonstrated that, in both cases, the tracking and position data generated by the peripheral was closely correlated with what was provided by GPS. This supports the viability of using it for navigation in areas where GPS is not available, such as under a bridge or inside an industrial structure.
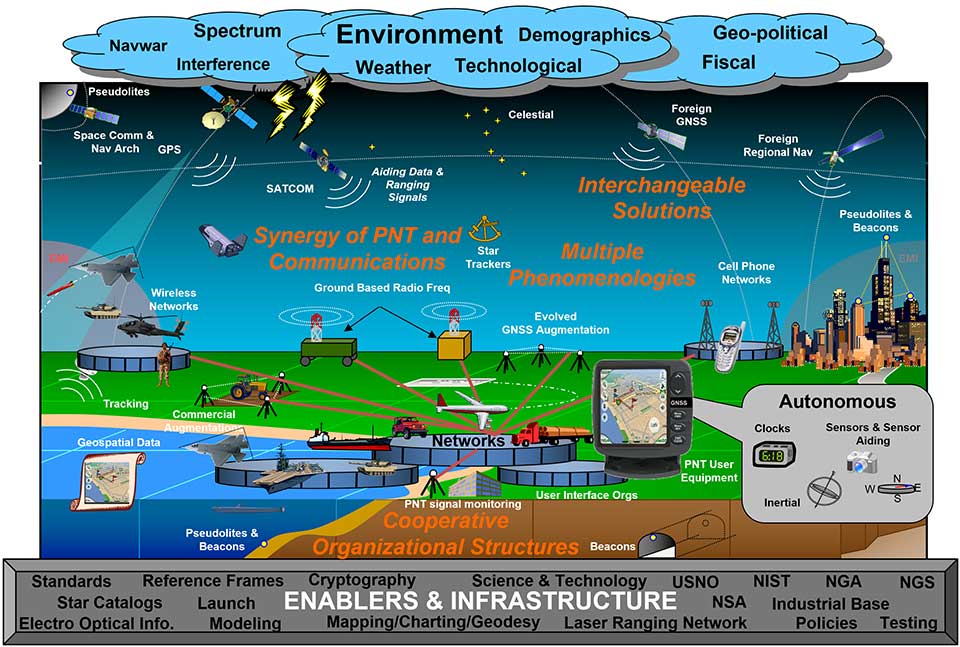
U.S. National PNT Architecture from a 2007 Department of Transportation report, updated in 2017. (Graphic: U.S. Department of Transportation)
The U.S. Department of Transportation (DOT) says it will implement a terrestrial timing system to complement and back up GPS signals, and plans to demonstrate the new system “toward the end of the calendar year.”
The demo is anticipated to include a range of technologies, including among others local positioning systems such as Locata and NextNav, wide-area coverage by eLoran, and — though the parameters of DOT’s mandate specified terrestrial backup — space-based signals furnished by Satelles.
The statement came in response to an inquiry in March from the House of Representatives’ Transportation and Infrastructure Committee concerning progress on a GPS Backup Technology Demonstration that was mandated in December 2017. Although funds were appropriated for the project, committee chair Peter DeFazio of Oregon saw little to no evidence of work being done, and so required a status report.
DOT issued a Request for Information (RFI) on May 3, with a due date of June 3. The RFI asked for “readiness-level six” technologies (bearing demonstrated results in a relevant environment) “capable of providing backup positioning, navigation, and/or timing services to critical infrastructure in the event of a temporary disruption to GPS.
“This demonstration effort also is expected to encompass technologies capable of providing complementary PNT functions to GPS by either expanding PNT capabilities, including cross checks, or extending them to GPS or Global Navigation Satellite System (GNSS)-denied or degraded user environments.”
The DOT said it is “interested in leveraging PNT service technology initiatives.” Possibly, the agency intends to contract for a service rather than build a new system.
Congress first required DOT to establish an operational terrestrial timing system to back up GPS signals, then expanded that definition to include positioning and navigation services.
Systems or services, or combinations thereof, must now provide all three functions.
The U.S. Department of Transportation (USDOT) convened leaders from state departments of transportation, stakeholders in academia, and representatives from the auto industry in Washington, D.C., to discuss the importance of preserving the 5.9 GHz spectrum for transportation safety.
The 5.9 GHz band supports vehicle-to-everything (V2X), a wireless technology that enables data exchanges between a vehicle and its surroundings. Starting with advanced technology development and demonstrations about 20 years ago, America has deployed 54 operational V2X projects, improving safety today, with more in the pipeline.
Vehicle manufacturers are planning to equip new cars with the technology. This next generation of intelligent transportation communications promises to improve safety for drivers and for vulnerable roadway users, such as pedestrians, bicyclists, disabled persons and transit users.
The National Highway Traffic Safety Administration (NHTSA) estimates that full adoption of just two V2X safety applications would prevent about half a million crashes and save approximately 1,000 lives a year. As more safety applications are developed for vehicles, more lives could be saved.
V2X will also support an efficient, safe, and smooth transportation system, with vehicles communicating with traffic lights to improve the flow of traffic. V2X applications such as dynamic traffic signal control and prioritization have the potential to reduce travel times by up to 27% and reduce fuel emissions.
Link to video of CV2X demonstration in Hawaii in June. (Photo: USDOT)