Vantor has rebranded from Maxar Intelligence. The newly named company also unveiled Tensorglobe, an AI-powered spatial intelligence platform.
The rebrand represents the culmination of the company’s multi-year journey to productize its core operational technology and transform from a satellite imagery provider into an end-to-end spatial intelligence company.
According to the company, the name Vantor speaks to how the company unlocks a real-time competitive advantage by delivering total clarity for missions across the space, air and ground domains, ending the era of disconnected sensor platforms. “Vantor is solving the most critical challenges across the defense and commercial sectors, including the urgent need for more advanced battlespace systems and the push to unleash autonomy across every industry,” the company said in a press release.
The company addresses these challenges with multi-domain spatial intelligence solutions that integrate sensor data across satellites, drones and ground-based assets to improve decision-making and drive autonomous operations at scale. Over the past six months, Vantor has launched several AI-enabled solutions, including:
Raptor: A software suite that integrates Vantor’s 3D terrain data with a drone’s native camera to ensure that autonomous platforms can navigate effectively and extract target ground coordinates accurately in the absence of GPS.
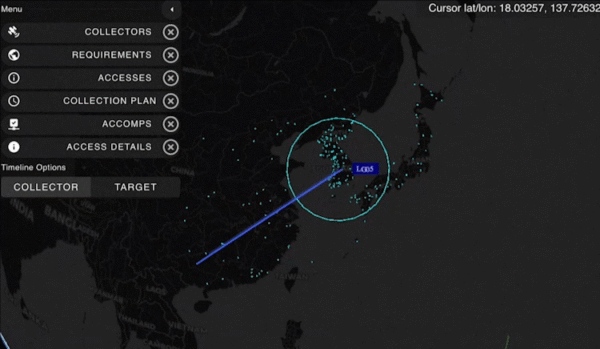
Sentry: A global-scale persistent site monitoring solution that can identify operational threats across hundreds of areas at once by integrating automated collection planning across multiple satellite constellations, including sovereign assets, with AI-driven data fusion and analytics.
Tensorglobe: An end-to-end platform that empowers organizations to build their own spatial intelligence system. Tensorglobe fuses sensor data from space, air and ground to create a living 3D globe, automating the intelligence cycle to keep this unified foundation up to date.
Vantor has partnered with innovators across the defense and commercial sectors to jointly build integrated intelligence solutions. For instance, Vantor is delivering the foundational spatial intelligence for Anduril’s next-generation mixed reality combat system designed for the U.S. Army’s Soldier Borne Mission Command Architecture (SBMC-A) program. The company has also signed partnerships with Saab and Taiwan’s AIDC to integrate Raptor into mission-ready systems designed for contested environments.
GNSS simulation has evolved well beyond accuracy testing. It now covers full-spectrum NavWar and PNT validation. Today’s simulators are expected to generate real-time GNSS, LEO signals, inertial measurement units (IMU), alternative navigation sources, jamming and spoofing — all from a single system.
“The number of signals continues to grow with the rise of multi-PNT sources and advanced threat capabilities,” said Jaemin Powell, senior product manager, NavWar & Simulation at Safran Federal Systems. “Our customers are preparing for GPS-denied operations, validating NavWar responses and ensuring resiliency in contested domains.”
Powell noted that Safran Federal developed BroadSim Genesis to enable simultaneous streaming of L1, L2, L5 and L6 GNSS and LEO signals with integrated jamming and spoofing — all within a compact 4U platform.
The company’s strategy is built on a software-defined architecture, allowing for rapid adoption to evolving threats and mission requirements, Powell said. Safran Federal collaborates closely with government stakeholders and defense primes to stay up-to-date with new requirements and incorporate real-world threat vectors, such as spoofing and jamming. The BroadSim platform supports software upgrades for every feature, from adding constellations and LEO signals to enabling hardware-in-the-loop (HIL) support or integrating additional PNT resources.
While defense and aerospace continue to serve as core markets, rising demand also is coming from space companies, LEO-PNT developers, and advanced electronic warfare laboratories now relying on Safran simulators.
“These users value the scalability, fidelity and flexibility of our simulation solutions, especially in environments with high dynamics,” Powell said. “They are looking beyond traditional GNSS, and we address that need with a simplified, all-in-one platform.
Large-Scale Simulation
“Large-scale simulation is technically demanding,” Powell added. “Generating thousands of signals across multiple bands with ultra-low latency and 1000 Hz update rates pushes both hardware and software boundaries.”
Maintaining the intuitive Skydel interface while adapting to evolving NavWar requirements remains a top priority for the company. For example, Safran Federal introduced real-time automated calibration for BroadSim Wavefront, which executes before every scenario. This allows users to power up and immediately begin testing, eliminating recalibration and setup delays.
“Simulation is more than just signal generation. It is about enabling operational confidence,” Powell said.
“Our platform gives users the ability to stress test systems, visualize behavior in real time and adapt quickly without relying on range time or live sky testing…We are enabling teams to meet their toughest NavWar and PNT challenges with confidence and flexibility. If you have demanding requirements, we are ready to deliver a solution that is intuitive, capable and built for the future.”
An A330 airplane carrying Spanish Defence Minister Margarita Robles experienced GPS interference while flying over Kalingrad, Russia, reports EU Today. The news outlet cites Spanish newspaper El Mundo as its source.
Robles was flying to in an aircraft belonging to the Spanish Air and Space Force. It was is “subjected to an attempt to throw it off course using GPS” over Kaliningrad as Robles was travelling to the Šiauliai air base in Lithuania on Sept. 24.
The pilot said incidents attempting to disorient pilots have been common for both commercial and military flights over Kaliningrad. Becausee this was a military craft, the plane was receiving instructions from a military satellite and the attempt failed.
A coalition of 14 major industry associations has called on the departments of Defense and Transportation to address increasing threats from GPS signal jamming and spoofing that are affecting civilian operations beyond traditional conflict zones.
The letter, signed by organizations including the GPS Innovation Alliance (GPSIA), Aircraft Electronics Association, Airlines for America and the U.S. Chamber of Commerce, was sent to Defense Secretary Pete Hegseth and Transportation Secretary Sean Duffy, outlining concerns about GPS signal interference. The letter warns that such interference is expanding beyond military conflict zones to affect civilian transportation and commerce operations in international airspace and waters.
The coalition represents industries that collectively contribute significant portions to the U.S. economy. The aviation system accounted for 5% of U.S. GDP in 2024, totaling $1.45 trillion, while ports and maritime operations contributed $2.9 trillion, nearly 10% of GDP. GPS technology has generated more than $1.4 trillion for the U.S. economy since its introduction, with more than 6 billion GPS-enabled devices in use worldwide.
The organizations are seeking coordinated action from the Trump administration to modernize GPS infrastructure and enhance its resilience against interference. The coalition has indicated its willingness to work with federal agencies on addressing what it describes as challenges to national security, public safety and economic prosperity.
System Vulnerabilities
Despite GPS maintaining a 99.99% availability rate with no recorded outages since 1993, the system faces several challenges. On-orbit satellites operate years beyond their intended design life, ground system upgrades have been delayed, and the system lacks counter-spoofing capabilities.
The coalition emphasizes that GPS serves as a foundation for modern defense, aviation, maritime operations and commercial activities. Transportation industry officials note their sector’s role as a key partner in U.S. military logistics operations.
“GPS is one of the most important innovations of the modern era, underpinning national security, critical infrastructure such as transportation, and commerce,” said Lisa Dyer, Executive Director of the GPS Innovation Alliance. “The Trump administration’s approach to “getting stuff done” is what this nation needs to finally achieve a modern GPS that is resilient to jamming and spoofing. The President’s leadership can also deter further harmful interference – actions that will benefit most critical industries that are delivering goods and services around the world and transporting passengers safely to their destinations.”
The GPSIA recommendations call for executive branch agencies to:
Accelerate the procurement and launch of modern GPS satellites and include anti-jamming and anti-spoofing technology upgrades in GPSground systems. Prepare a program plan that ensures GPS is technologically more advanced than China’s BeiDou and Europe’s Galileo GPS-like systems.
Strengthen enforcement and coordination across the U.S. government to rapidly identify and respond to interference events and crack down on illegal sales and use of jamming devices.
Streamline regulatory and certification processes to accelerate adoption of advanced technologies such as jam- and spoof-resistant antennas, modern GPS signals, and anti-spoofing signal authentication in airframes, receivers and devices.
Deter interference through public statements and diplomatic engagement, making clear the United States will not tolerate harmful jamming and spoofing outside conflict zones that risks public safety and impedes commerce.
“These are concrete, achievable actions that, if pursued, will ensure the integrity, continuity, availability, and resiliency of GPS. This approach also offers the commercial position, navigation, and timing industry time to mature and deploy their technologies so that they can meet the high regulatory bar that is appropriately set for public safety applications,” Dyer said.
Ukraine unveiled its TLK-1000 underwater drone — capable of striking targets as distant as 2,000 km (1,240 miles) away — at the Defense Tech Valley 2025 exhibition in Lviv on Sept. 19.
While the torpedo drone itself moves underwater, it has surface elements including antennas for receiving GPS signals, video and thermal imaging cameras, and communication equipment, reported Militaryn in February, when Ukraine President Volodymyr Zelensky first introduced the Toloka drone at the Support Ukraine summit. Designed for stealth operations just below the surface, it uses electric propulsion to evade detection and penetrate Russian defenses.
Kyiv has repeatedly used maritime drones to inflict heavy losses on Russian assets in the Black Sea, according to Defense Express. The TLK-1000 could threaten the Crimean Bridge, a supply and transport route for Russian forces to occupied territories, as well as Russian submarines.
There are three models of Toloka. The largest, TLK-1000, is 12 meters long with a warhead payload of up to 5,000 kg and a range up to 2,000 km (1,240 miles). It is built for long-distance missions and heavy loads. It navigates with GNSS supplemented by AI-INS with a Doppler Velocity Log (DVL).
The TLK 400 also navigates with AI-INS with DVL and GNSS. It is 4 to 6 meters long, its payload can be up to 500 kg, and its range can be up to 1,200 kilometers. The TLK-400 features a hybrid propulsion system and is intended for reconnaissance, mining, signal relay and strike operations.
The TLK 200 navigates with GNSS + AI-INS. It is 2.5 meters, its range 100 km, and its payload 20 to 50 kg of explosives. Typical tasks include reconnaissance, mining, short-range strike missions and radio-relay support.
Safran Electronics & Defense has released an enhanced version of VersaSync, its ruggedized GNSS master clock and network time server designed for defense applications.
The updated VersaSync platform includes several technical improvements over previous versions. The system now offers improved frequency stability in harsh environmental conditions, including extreme temperatures, shock and vibration. Engineers have enhanced holdover performance for GNSS-denied missions and increased resistance to power supply transients to maintain timing continuity during platform power disruptions.
The new version maintains form-fit-function compatibility with earlier VersaSync models, allowing for straightforward upgrades without major redesigns.
The system has been deployed in more than 16,000 operational cases across various platforms, including high-altitude intelligence, surveillance and reconnaissance aircraft, armored vehicles, naval combat systems and offshore platforms. VersaSync incorporates anti-jamming and anti-spoofing algorithms and features a conduction-cooled design for size, weight and power (SWAP)-constrained environments.
The device provides secure Network Time Protocol and Precision Time Protocol synchronization over Ethernet and offers configurable input/output options. Applications include mobile command, control, communications and intelligence platforms, airborne ISR, Satellite On The Move systems and naval communications.
Safran Electronics & Defense will display the enhanced VersaSync at DSEI 2025.
Safran Electronics & Defense and QinetiQ have entered a strategic partnership to deliver sovereign and resilient positioning, navigation and timing (PNT) solutions for the United Kingdom Ministry of Defence. The collaboration addresses today’s urgent need for trusted PNT capabilities in increasingly challenging and GNSS-denied operational environments.
By integrating QinetiQ’s Q40 GNSS receiver with Safran’s SecureSync time server, the partnership offers advanced protection against jamming, spoofing and other adversarial electronic warfare threats. The joint solution supports multi-signal reception and delivers reliable, coherent synchronization for mission-critical military operations — from strategic headquarters to frontline forces.
The SecureSync time server. (Photo: Safran)
This next-generation, sovereign capability strengthens the UK’s operational advantage, ensuring continuous access to secure timing and navigation, even under electronic attack. The solution is designed to adapt and expand, accommodating future threats and supporting the full spectrum of defence operations.
“The Q40 provides navigational assurance in environments where jamming, spoofing and electronic attacks are ever-present,” said James Willis, chief executive UK Intelligence, QinetiQ. “By pairing it with Safran’s SecureSync, we are giving UK forces a trusted, sovereign solution that ensures precise timing and navigation data remains available when it matters most.”
The Q40 GNSS receiver. (Photo: Qinetiq)
“In the current context of evolving threats and contested environments, guaranteeing sovereignty in navigation and timing is more critical than ever for national defence,” added Maxime Gorlier, director of PNT Business Unit for Safran Electronics & Defense. “This partnership enables UK armed forces to maintain full independence and sovereignty, even when facing sophisticated electronic warfare tactics. Together, we are committed to providing future-proof PNT solutions that strengthen the UK’s resilience and strategic autonomy.”
The partnership leverages both companies’ sustained investment in customer-focused research, development and innovation, and demonstrates their shared commitment to providing robust, secure and resilient PNT solutions.
General Atomics Aeronautical Systems Inc. (GA-ASI) is in the news again, as it got its prototype version of the U.S. Air Force (USAF) Collaborative Combat Aircraft (CCA) into the air for the first time, with an anticipated lengthy flight test campaign to follow. This latest CCA iteration, refered to as the YFQ-42A CCA, was derived from an earlier jet-powered XQ-67A Off-Board Sensing Station, a platform that enabled the company to not only develop and build but also fly this latest aircraft in just one year.
GA-ASI CAA makes first flight Aug. 27, 2025. (Credit: GA-ASI)
The UAV features significant autonomous capabilities developed over nearly five years of training using the MQ-20 Avenger unmanned jet aircraft. The strategy of beginning with a company-developed baseline aircraft (Avenger), securing USAF support for an initial derivative and then for the YFQ-42A CCA, appears to be accelerating development of the Loyal Wingman concept toward USAF operational manned-unmanned airborne teaming.
Previously, in July, GA-ASI began preparations to enable friendly European countries to rapidly participate in the future CCA-capabilites by teaming with its German affiliate General Atomics Aerotec Systems GmbH (GA-ATS). The agreement appears to enable high-volume local manufacture of a European CCA, and press releases have implied that potential content is expected to be provided by other high-tech local suppliers.
Following earlier reports that Reliable Robotics (RR) has been busy automating all phases of aircraft operations, including a Cessna Caravan cargo aircraft, USAF has awarded RR a $17.4 million contract to install a Reliable Autonomy System (RAS) in another Cessna. The resulting automated Cessna 208A Caravan is to be used in an estimated two-year program toward obtaining FAA certification that should enable flight within the U.S. National Airspace System (NAS). The system has been demonstrated — with a remote pilot in the loop — to be able to take an aircraft from startup on the ramp, through taxi, takeoff, en route flight, landing and taxi return to the ramp for unloading.
RR autonomous Cessna 208B takes off from Mojave Air and Space Port, California, on Aug. 8, 2024. (Credit: RR)
Cessna Caravans have been heavily used for cargo transport across the U.S. (and around the world) with a range of 1000 miles, carrying up to 1000 lb of cargo. The RR certification program is intended to allow these types of automated unmanned commercial and military operations on a regular basis throughout FAA controlled US airspace, alongside manned aircraft. Flying military unmanned aircraft in the NAS currently requires extremely highly-coordinated, continuous activity. The hope is that eventually it could become an easier more regular form of autonomous cargo/people air transport.
The cost of the continuing war in Ukraine may be affecting the Russian economy — a major drone manufacturer apparently is facing bankruptcy despite Russia currently using thousands of drones in attacks on Ukraine. The situation is difficult to understand, but this is an expensive war.
However it appears that, AO Kronshtadt, one of the major drone suppliers in Russia is also beset by civil lawsuits from several organizations to which it owes lots of rubles. Its Orion and an updated version Inokhodets drone are apparently somewhat similar to the US MQ-9 Reaper UAV.
AO Kronstadt employees assemble the Russian Orion UAV. (Credit: open source)
Russia has apparently converted the Orion/Inkhodets medium-altitude surveillance drone into a strike version, but with limited success. Nevertheless, Kronshtadt apparently has made some progress, selling an export version in Asia.
Meanwhile, Russia still is apparently producing up to 6,000 Shahed one-way drones per month by another manufacturer in the Alabuga Special Economic Zone at a unit cost of around $70,000. This is significantly lower than drones that were originally purchased from Iran at $370,000 each.
The U.S. Federal Government through its transport agencies apparently has the exclusive right to control drones, including bringing malicious UAVs down from the sky. Most people understand that the Federal Aviation Administration (FAA) regulates who flies what and where, but who is in charge of reducing and removing drone threats? It may have been difficult to understand during recent unauthorized overflights of military installations on the East Coast why someone didn’t shoot down the offending drones.
Now, a group of police agencies has approached members of Congress to ask for the right to “detect, track, identify and mitigate” the unlawful, negligent or malicious use of drones that threaten public safety. Citing a number of incidents — including drone incursions at airports and other incidents where unmanned aircraft have interfered with firefighting and disaster response, instances where law enforcement activities have been overflown and disrupted, and the practice of using drones to drop drugs, guns and mobile phones into prisons — the law enforcement group sees a need for permission to engage. With several major events scheduled across the U.S., it likely is time to support law enforcement with the appropriate powers needed to protect the public.
It is true that several bills are already pending before Congress to enable state, local, tribal and territorial law enforcement agencies to find, identify and possibly mitigate inappropriate drone activity, but the group is urging action now. And they clearly demonstrate the need to be able to stop drone activity when necessary — the federal government cannot cover the whole country all the time, so it makes more sense to adequately train law enforcement and to distribute authorized local mitigation activity whenever it is found to be necessary.
So a mixed bag this month — progress for the U.S. Collaborative Combat Aircraft initiative, more steps toward automation for air cargo transport, problems for one Russian drone supplier while others increase volume and the United States seeks options for better defense against them, and U.S. law enforcement seeks the capability to help mitigate drone incursions where they are not wanted — plenty of different angles to consider around unmanned aerial vehicles.
Markus Irsigler, Sebastian Kehl-Waas, Carsten Stöber, Jürgen Dampf, Rohde & Schwarz GmbH & Co. KG
GNSS jamming and spoofing pose a significant threat to global security, as satellite-based navigation and timing systems are utilized in various application fields, including critical infrastructure, transportation, military operations and communication networks. These intentional interferences disrupt signals or deceive GNSS receivers, leading to navigation errors, loss of situational awareness and potential safety hazards.
Local, low-power jamming is often used to deliberately prevent GNSS-capable devices from recording their positions and being tracked. Such jamming devices, known as personal privacy devices (PPDs), are typically used to prevent fleet monitoring, concealing personal travel, or evading toll systems. Although mostly illegal, PPDs are fairly widespread and can pose a significant threat to GNSS availability, at least on a local scale.
On the other hand, larger-scale incidents are observed very frequently. Regional jamming often occurs in conflict zones to protect military assets or disrupt enemy operations. Jamming has also been reported near critical infrastructure. Spoofing is typically less frequent than jamming, but it poses a more concerning integrity threat when incorrect PVT data is used for navigation. Well-documented events include the (in)famous 2017 incident affecting ships in the Black Sea, where a spoofed GNSS signal led vessels to report incorrect positions. Jamming and spoofing also play an important role in the Ukraine conflict, where it is used to disrupt enemy drones, guided munitions, and navigation. Such events clearly highlight the vulnerability of GNSS-dependent systems and the need for robust mitigation techniques and strategies.
Against this background, testing how GNSS devices react to such threats has become more and more important, especially if they feature dedicated jamming detection and mitigation techniques. In such cases, the main test objective is to verify that these detection and mitigation techniques work as expected and that the GNSS receiver reacts properly and as expected in response to such attacks.
Categorization of GNSS Threats
Although jamming and spoofing can be considered the most critical threats, GNSS signals can be degraded in various other ways. Signal degradation effects can occur anywhere along the path from the GNSS satellite to the user. They can be caused by the transmitting satellite itself, usually in the form of hardware malfunctions, typically referred to as “evil waveforms.” They can also occur along the signal path in the form of ionospheric and tropospheric errors or scintillation effects, or they can be a result of the conditions in the vicinity of the GNSS user. This includes jamming, spoofing, RF interference caused by other signals, as well as signal obscuration and multipath caused by buildings or trees.
“Evil waveforms” can pose a significant threat to GNSS signal integrity, leading to large positioning errors. However, the occurrence of this effect is very rare and therefore not specifically considered in this article. There are also some atmospheric effects that have the potential to significantly degrade the quality of GNSS signals. Especially ionospheric and tropospheric scintillation due to temporal, fast-changing atmospheric conditions can cause rapid amplitude and phase variations, leading to reduced C/N0 or even loss of lock. Again, this does usually not happen every day and is therefore not discussed in detail below either.
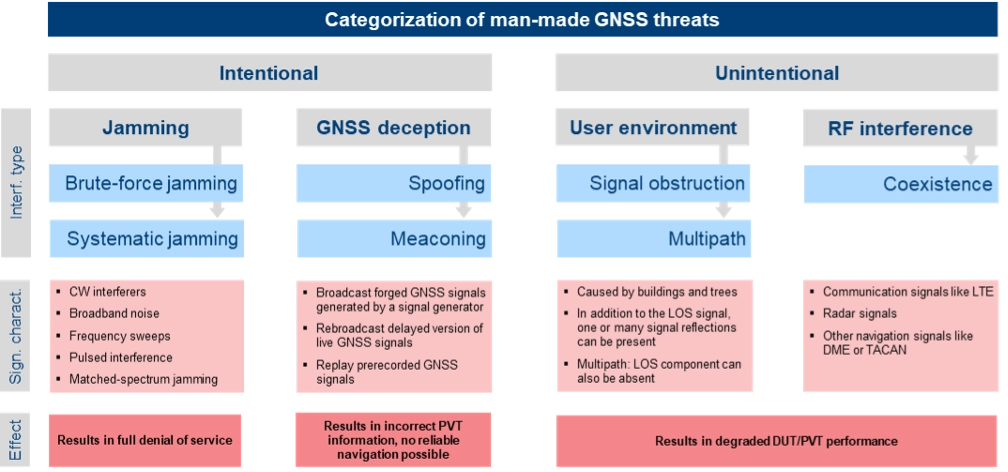
The most critical and common GNSS threats originate from interference signals that occur in the vicinity of a user receiver. Unlike system-inherent threats that originate from GNSS satellites or atmospheric conditions, these threats can be termed as “man-made” and categorized as shown in Figure 1.
Figure 1. Categorization of man-made GNSS threats. Credit: All figures provided by authors.
Jamming can be divided into two types of attacks. Brute-force jamming aims at completely blocking GNSS reception for a receiver by deliberately emitting interference signals like CW interferers, broadband noise or frequency sweeps with very high-power levels. As a result, the carrier-to-noise values will drop below the receiver’s acquisition and/or tracking threshold, and GNSS signals cannot be processed anymore. In contrast to such a simple jamming attack, where the attacker needs to have only basic knowledge about the GNSS signals (e.g. center frequencies and signal bandwidths), systematic jamming is a much more sophisticated attack, which can be further divided into
• Intelligent or smart jamming. The objective is to jam only a specific part of the navigation message (e.g. the ephemeris data section), so that the navigation message can never be fully decoded and the receiver will never be able to perform a position fix. All other parts of the navigation message remain unaffected, allowing signal tracking to continue for the receiver. Figure 2 illustrates this attack on the GPS L1 C/A signal.
Figure 2. An intelligent jamming attack performed on a GPS L1 C/A signal.
Smart jamming is much more complicated to implement for an attacker as the jammer must only be active during specific time intervals; this requires that the jammer is somehow synchronized with GNSS/Coordinated Universal Time. Moreover, the attack requires knowledge of the navigation message structure and what information the receiver needs to compute a position. Nevertheless, if done correctly, the attack is rather difficult to detect [1].
• Matched spectrum jamming. The objective is to generate a GNSS-like jammer signal with the same spectral characteristics as the real GNSS signals but without any valuable navigation information (i.e. the navigation message is missing). Matched-spectrum jamming is not straightforward, and to be effective, an attacker must replicate the GNSS signals for multiple visible satellites simultaneously, considering signal characteristics such as pseudo-random noise codes and, ideally, their correct Doppler shifts. In contrast to jamming, GNSS deception techniques aim to force the receiver to compute an incorrect PVT solution, compromising the integrity of GNSS-based navigation. The two basic methods are:
• Meaconing. This rather simple approach is based on rebroadcasting a delayed version of live GNSS signals. This can be realized by using a commercial GNSS repeater. Alternatively, previously recorded actual GNSS signals can be replayed.
• Spoofing. This includes generation and broadcast of forged GNSS signals. This is typically done using a GNSS simulator, but specialized, modified GNSS receivers combined with a transmitting unit can also be used. The simulated signals need to be self-consistent, i.e. a GNSS receiver must be able to compute a PVT solution based on the simulated constellation. Spoofing attacks can be rather simple, e.g. broadcasting high power signals that represent a different location than those of the receiver under attack. The aim is to force the receiver into a reacquisition process, tracking and processing only the fake GNSS signals. More sophisticated spoofing attacks are possible [2], but not discussed in this article.
Additionally, the PVT performance of a GNSS receiver can also be degraded by objects in the vicinity of a GNSS user, causing signal obstruction and reflections from buildings, trees, or the ground. Multipath can cause significant ranging and positioning errors. Multipath effects can hardly be avoided and must be seen as a permanent threat to GNSS signal quality.
Finally, other existing signals and services can interfere with GNSS, either because there is a frequency overlap (in-band interference) or harmonics from other signals fall into the GNSS bands (out-of-band interference). As an example, the upper part of the DME/TACAN band overlaps with a significant portion the GNSS L5 band. The effect of this type of interference on GNSS receiver performance can be analyzed by performing coexistence tests.
RX-Internal Detection and Mitigation Methods
At least some of the threats discussed above can be detected and/or mitigated by the GNSS receiver. The capability of a GNSS receiver to detect and apply countermeasures to threats such as multipath, jamming or spoofing depends on the receiver’s availability of specific features and its basic architecture. Figure 3 shows the basic building blocks of a typical GNSS receiver with a single, fixed reception pattern antenna (FRPA).
Figure 3. Basic architecture of a FRPA receiver
The three basic building blocks are the antenna, the RF front-end and the digital signal processing section. The antenna is responsible for receiving the weak GNSS signals as well as for successive amplifying and band-limiting. It typically features a low noise amplifier (LNA) and a band-pass filter. The signals are then fed to the receiver front-end where the signals are amplified, down-converted to an intermediate frequency and converted to the digital domain. Part of this process is the automatic gain control (AGC) loop; the AGC acts as a variable amplifier, adjusting the power of the incoming signal and keep it constant over time. The sampled and quantized stream of IQ data is then fed to the digital signal processing section, where signal conditioning, acquisition and tracking, and PVT solution computations take place.
In contrast to using a single antenna with a fixed antenna pattern, some receivers use an adaptive antenna array, also referred to as controlled reception pattern antenna (CRPA). The idea is to weigh the signals received by each element according to dedicated optimization criteria. Typical optimization criteria are to minimize the signal’s output power towards a dedicated direction (“null-steering”), or to maximize the signal to interference or signal to noise ratio (“beamforming”). The underlying receiver architecture is more complex as signal weighting mechanisms must be added to the signal processing chain. These can be integrated before the digital processing block (“pre-correlation”) or implemented as an additional processing step between the correlation and tracking stages in the digital signal processing section (“post-correlation”). Both approaches are very effective in mitigating jamming and spoofing attacks, as they can either form a null in the direction of a strong jammer/spoofer or form beams towards the wanted signals from GNSS satellites, thereby de-weighting any unwanted signals coming from other directions.
Pre-correlation architecture of a 4-channel CRPA receiver
Post-correlation architecture of a 4-channel CRPA receiver
Within the processing chain of a GNSS receiver, there are different approaches and methods to detect and mitigate interfering signals, which are summarized in the following table:
AGC monitoring
●
●
Monitoring of the gain in the AGC loop. A sudden drop of the AGC gain can be an indication of an interfering signal; detection of high-power interferers; low-power spoofing attacks very difficult to detect
Spectrum monitoring
●
●
Detection of interferers and jammers above the noise floor; especially suited for detecting CW interferers. Not suited for the detection of matched-spectrum jammers, spoofers and meaconing attacks as their spectrum is typ. identical to the GNSS spectrum.
Frequency domain adaptive filtering
●
●
Dynamically identifies and suppresses unwanted frequency components (e.g., interference or multipath) by adjusting (notch) filter parameters.
Pulse blanking
●
●
Pulse blanking is a time-domain interference detection and mitigation technique used in GNSS receivers to detect and suppress short-duration, high-power pulses, typically caused by pulse jammers or Radar transmitters. Monitors the incoming signal power in short time windows and “ignores” this signal part in case certain power level thresholds are exceeded. Effective to mitigate pulsed jammers, not suited for multipath mitigation or anti-spoofing measures.
C/N0 monitoring
●
●
Monitoring over time and/or comparison against theoretical max. value; detection of all types of interferers; low-power spoofing attacks very difficult to detect
Time jump detection
●
●
Time jumps (backwards or forwards) are clear indications for meaconing or spoofing attacks.
PVT monitoring, incl. RAIM
●
●
Example: The computed position can be constantly compared against a known reference position. Not possible to distinguish between jamming/spoofing or other environmental effects like multipath. This also includes receiver-autonomous integrity monitoring (RAIM) schemes, that can be considered as a special form of PVT monitoring.
Doppler monitoring
●
●
Compare Doppler against theoretical/geometrical values; monitored Doppler profiles may show irregularities in case of an attack. Difficult to be separated from environmental or atmospheric effects.
CMC monitoring
●
●
„Code minus Carrier“ observable shows irregularities and increased noise in case of an attack. Difficult to be separated from environmental or atmospheric effects.
Signal Quality Monitoring (SQM)
●
●
Sampling of the correlation function using a few correlators; can detect distortions of the correlation function resulting from multipath, jamming or spoofing attacks.
Massive multi-correlator monitoring
●
●
Continuous, high resolution observation of the code/Doppler space. Can be done during signal acquisition and tracking. Can detect multipath, jamming, meaconing and spoofing attacks.
Derived Test Requirements
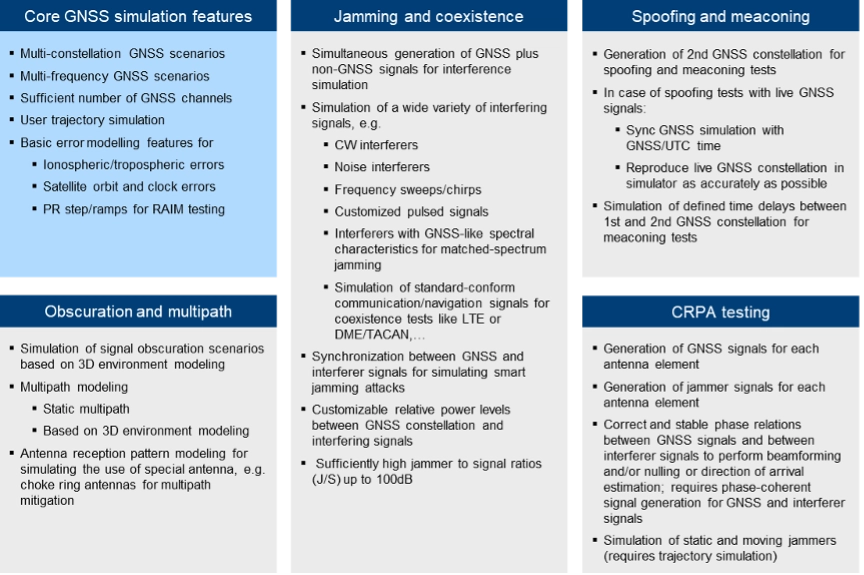
Based on the typical threat signal and attack characteristics, as well as the receiver-internal detection and mitigation methods discussed above, the test and simulation requirements listed in the table below can be derived. In addition to the requirements related to threat simulations (grey background), the table also contains “base requirements” for the simulation of realistic GNSS scenarios (blue background):
Testing: Methods, Setups and Challenges
The test methods, strategies and setups used depend on the architecture of the GNSS receiver being tested, the receiver features that need to be evaluated and the specific testing objectives.
A first categorization can be made by examining the origin of the GNSS signals being used for testing. The signals may come from real GNSS satellites and be used instantly and on-site (live GNSS testing) or recorded, stored, and played back in the lab (record/replay). Alternatively, testing can be done entirely in a lab environment using GNSS simulators. There are also hybrid test methods that will be discussed later in this article. In comparison to using real GNSS signals – either via live testing or the record/replay approach – using GNSS simulators in a lab environment offers significant benefits.
Simulation vs. Live GNSS Testing. One major drawback of using live signals is that the system conditions are often unknown at a given point in time, and – most importantly – they change over time. The locations of the satellites — and thus the geometric conditions — change as the satellites move along their orbits. Errors, such as atmospheric effects, are also time- and location-dependent. One of the most unpredictable error influences is multipath. The magnitude of multipath errors depends on a variety of different parameters, including the number of reflections, the distance between the reflection points and the antenna or the strength of the reflected signal. The latter is determined by the material properties of the reflecting surface. Both the geometric conditions and the material properties of the reflectors change or may change over time – the geometric conditions due to the permanent motion of the satellites and the reflector properties due to meteorological influences like rain, dew, or snow.
As a result, when using live signals, one must expect that the conditions change permanently and unpredictably and will never be the same for two distinct points in time. It is therefore very unlikely that two successive test runs can be performed under identical conditions. Repeatable testing, which is one of the most important test requirements, is impossible when using live GNSS signals.
Well-defined and controlled simulation conditions can only be ensured by using a GNSS simulator. A simulator typically offers fully customizable and repeatable scenarios (i.e., one and the same test scenario) that can be repeated as often as needed, producing the same signals with the same characteristics. Moreover, a simulator is often a more cost-effective and efficient solution, whereas using live signals would be time-consuming, complex, expensive or even impractical (e.g. test of airborne and spaceborne receivers).
The following discussion of typical test setups therefore focuses on the use of signal generators for GNSS testing. In terms of test scenarios, the focus will be on jamming, spoofing and coexistence testing. Testing against multipath influences is not specifically discussed below.
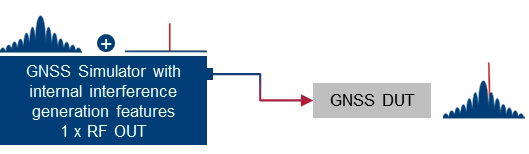
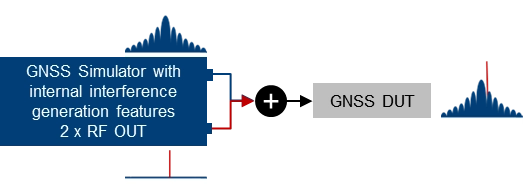
Basic simulator setups. The basic approach for testing against GNSS threats is to combine a “clean” reference GNSS simulation scenario with interfering signals and add the combined signals to the device under test (DUT). This basic concept can be implemented using two separate signal generators or an integrated solution that combines GNSS simulation and threat signal generation in a single instrument. Based on the architecture of the integrated solution (1 RF output vs. multiple RF outputs), GNSS and interfering signals are already combined internally, or GNSS and interfering signals can be fed to different RF outputs and combined with an external combiner before fed to the DUT.
Using two separate signal generators for GNSS threat testing. The interference generator (red) can either be a second GNSS simulator for generating spoofing signals or any other signal generator providing non-GNSS signals for jamming or coexistence tests.
Using a GNSS simulator with integrated interference generation capabilities. The signal generator features 1 RF outputs. GNSS and interfering signals are combined internally. An external combiner is not needed, but the dynamic range between GNSS and interferer (J/S) is usually limited.
Using a GNSS simulator with integrated interference generation capabilities. The signal generator features 2 RF outputs. GNSS and interfering signals fed to individual RF ports and combined externally. This requires an external combiner, but with the benefit that very high J/S ratios can be achieved.
Conducted testing vs. OTA testing. The basic setups introduced above only work if the receiver has dedicated and accessible input connectors to feed the antenna signal to the receiver’s front end. This is sometimes not the case, so that conducted testing is not possible and over-the-air (OTA) tests must be considered. A classic example of such DUTs is mobile phones, where no antenna connector is available, at least not without dismantling the device.
Testing such devices against interfering signals is still possible by using a shield box. The shield box has an RF input to feed in the combined GNSS and interfering signals. The signals are then retransmitted into the inside of the box and the DUT uses its integrated antenna to receive and process the signals coming from the GNSS simulator.
Using a GNSS simulator in combination with a shield box to test GNSS devices with integrated antennas.
OTA GNSS threat simulation using a shield box with 2 RF inputs and 2 transmit antennas. The GNSS signals and the interfering signals are fed separately (uncombined) into the shield box.
An alternative setup is to use a shield box with two RF inputs. In this case, the wanted signals and the interfering signals are not combined externally but are fed to the shield box via separate RF input connectors and transmitted to the GNSS DUT via separate transmit antennas.
Additional aspects and challenges must be considered when performing OTA tests using mobile phones as a GNSS DUT. This includes conducting a proper cold start, removing all preexisting navigation-related information from its memory, and disabling any other sensors that may contribute to computing the phone’s position, including any assisted GNSS services. This is typically not a concern for most standalone GNSS receivers that feature dedicated cold start procedures and usually have no other positioning sensors on board. On the other hand, initiating a real cold start for GNSS modules in mobile phones can be tricky. Just rebooting the phone does not necessarily work, and the availability of dedicated settings also depends on the phone’s operating system (e.g. iOS vs. Android).
Another challenge during OTA testing of mobile phones is how to assess and analyze the impact of any interfering signals on signal acquisition, tracking and positioning. This requires detailed analysis and monitoring features on the mobile phone, which are typically not a standard feature of the phone’s operating system. Specialized GNSS monitoring apps can be used instead. To get access to the data during the test, special screen mirroring apps can be installed on the mobile phone.
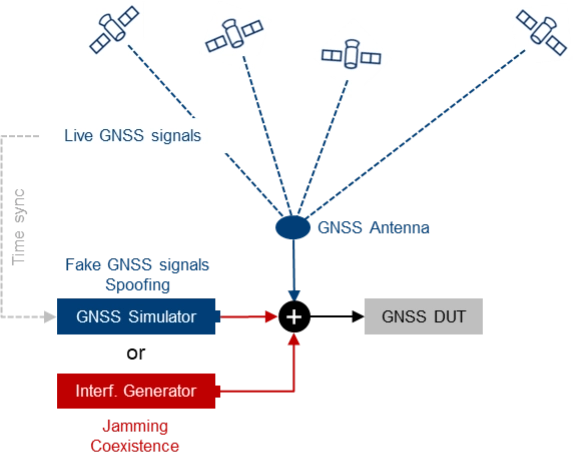
Testing with live signals. GNSS tests may also be performed in combination with live GNSS signals using already existing field infrastructure such as GNSS receivers installed at mobile base stations. A typical use case is to add one or several jamming/spoofing signals, or even an entire (stronger) “spoofing constellation” to an existing “live GNSS constellation” and test how the GNSS receiver reacts to such an attack. The typical test setup is illustrated in Figure 4.
Photo: Figure 4. The receiver’s response to interference is evaluated by introducing jamming or spoofing signals, alongside normal satellite signals using existing field infrastructure. This setup is often used to assess reactions to attacks.
This approach may be a good alternative to simulating everything with a GNSS simulator, as much more HW, i.e., more GNSS channels and more RF paths, are required with a simulator-internal approach. On the other hand, there are also some challenges associated with this test method, e.g., the signal generators, which need to be operated in a field environment. Moreover, for more sophisticated spoofing attacks, a prerequisite is the capability to time-synchronize the GNSS simulation with the live GNSS constellation.
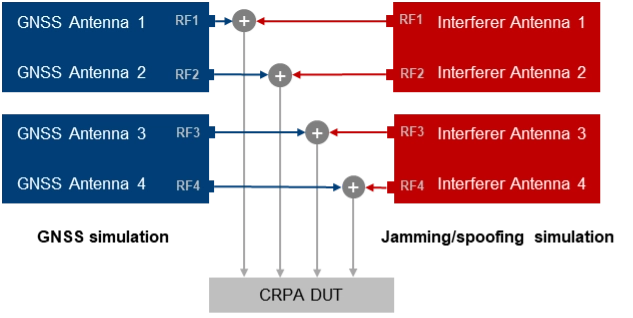
CRPA testing. For testing GNSS receivers with multiple antenna inputs, particularly CRPA systems, several RF sources/paths need to be combined and synchronized. The following illustration shows a possible setup for testing a 4-channel CRPA receiver against jamming or spoofing attacks. It is based on the 2-path architecture introduced above. It consists of two signal generators for generating GNSS signals for each antenna (left part of the setup) and two signal generators for generating the jammer/spoofer signals (right part of the setup). GNSS and interfering signals are combined per antenna element and fed to the RF inputs of the CRPA receiver under test.
For CRPA testing, generating phase-coherent signals is a must, i.e., it must be ensured that the phase relations between the GNSS signals and between the interfering signals represent the actual geometrical conditions and, above all, remain consistent throughout the simulation. To achieve this, a common LO signal needs to be used for generating the GNSS and interferer signals in all signal paths.
Another challenge is related to calibration. To correctly simulate the directions of the satellite signals and the interference signals, the test system must be calibrated at the RF interface to the DUT with respect to amplitude, phase and propagation time. This means that the amplitude, phase and propagation time differences between the individual RF paths, resulting for example from cables orRF components, must be compensated.
Rohde & Schwarz Solution
With GNSS test solutions from Rohde & Schwarz, all the relevant requirements for testing GNSS receivers against GNSS threats can be addressed. Available test solutions range from simple, single-channel, waveform-based signal generation with limited simulation time up to multi-frequency, multi-constellation GNSS simulators with 2 RF outputs, hundreds of GNSS channels and internal threat simulation capabilities, including non-GNSS signals for jamming and coexistence tests. For these advanced GNSS tests, the R&SSMW200A high-end vector signal generator is the ideal choice. It can be equipped with a multitude of GNSS options and feature sets.
Photo: Testing against GNSS threats with the R&S SMW200A
Jammer simulation. There are several ways to generate jamming and coexistence signals with Rohde & Schwarz signal generators in general and especially with the R&SSMW200A. Simple interference signals like noise or a CW interferer can be generated by using an optional integrated noise generator. For coexistence testing, the instrument can be equipped with signal generation capabilities for various standard-conforming communication signals, such as LTE. Customized interferer signals in the form of waveform files can be created by external software tools like MATLAB or Python and replayed by the instrument.
Customized jamming signal as well as entire jamming and coexistence scenarios can also be created using the R&SPulse Sequencer. The software allows to generate typical simple GNSS jamming signals like CW interferer, frequency sweeps, or pulsed interferers, but also complex jamming scenarios with consideration of moving interference sources and moving GNSS receivers, user-defined antenna patterns and scans. Depending on the signal characteristics, the jammer and receiver positions and the antenna arrangement, the software calculates the correct amplitude, phase angle and signal propagation times for the jamming signals.
Further reading
[1] Curran, James T. et. al. (2017): A look at the Threat of Systematic Jamming of GNSS, InsideGNSS, September/October 2017
[2] Dovis, Fabio et. al. (2015): GNSS Interference Threats and Countermeasures, GNSS Technology and Application Series, Artech House, 2015
Quantum technologies may offer a solution to GPS jamming and spoofing, according to the University of Chicago. Already, prototypes are being tested of a suite of sensor-based techniques that do not rely on satellite signals.
GPS jamming and spoofing have emerged as growing threats in recent years, according to the Chicago Quantum Exchange, based at the university. In 2024 alone, more than 1,000 commercial flights per day were affected by GPS spoofing, especially while flying through regions like the Middle East and Eastern Europe.
During these incidents, in-flight instruments show pilots that their aircraft is flying higher or lower than they truly are or that they are miles off their actual location. In maritime settings, spoofed GPS signals have even caused ships to veer off course or run aground. These are not isolated glitches but the result of deliberate electronic warfare tactics.
Corporate partners of the Chicago Quantum Exchange, including Boeing, Infleqtion and SandboxAQ, are among those developing applications. The CQE is a hub that connects leading universities, national labs, and industry partners to advance quantum technology.
“Governments and the commercial industry are in dire need of this technology,” said Ken Devine, senior product manager for quantum navigation at SandboxAQ. “The geopolitical issues happening across the world, and the ramp up in both jamming and spoofing — Russia, Ukraine, the Middle East, Israel, Iran — everyone’s getting super disruptive, and that’s not going to go away anytime soon. Everyone is saying, ‘We basically need this yesterday.’”
In May 2023, SandboxAQ completed the first of many flight tests for the United States Air Force and its commercial aviation partners, including two major Air Force exercises that year.
In 2024, Boeing completed the world’s first recorded flight using multiple quantum navigation systems, testing the ability of these sensors to navigate across the central U.S. for four hours without GPS.
The Boeing test incorporated two different technologies. The first is a magnetic field-based navigation system called AQNav from SandboxAQ, It uses map matching, though the map that they use is of the Earth’s crustal magnetic field rather than terrain. Infleqtion is investigating both techniques. The second is an inertial navigation system from quantum sensing technology company AOSense.
Jay Lowell, principal senior technical fellow at Boeing, said it was vital to consider “whether and how” the different technologies could be used together. “Maybe that means a tradeoff of performance between sensors in moments where one struggles and the other’s strong,” Lowell said. “Fundamentally, it means we just need to understand whether their combined data is better than either one alone.”
Detecting tiny changes
Inertial navigation depends on accelerometers and gyroscopes — which respectively measure acceleration and rotation — to measure movement. An inertial sensor tracks how an object moves from a known starting point by recording changes in its speed and direction.
While basic accelerometers are common in smartphones and fitness trackers, quantum inertial sensors can detect changes in motion down to the femtometer — less than the width of an atom — making them extraordinarily precise. Inertial sensors have applications in space-based technology, since they do not need maps or fixed points to navigate.
Infleqtion recently completed commercial flight trials of inertial-based quantum navigation in the United Kingdom and plans to conduct tests in the U.S. as well. Infleqtion’s Chicago office is also developing an AI-powered tool called SAPIENT that won first place in the U.S. Army’s xTechScalable competition.
“[SAPIENT] is focusing on the software side, taking the outputs of multiple kinds of sensors and stitching them all together with AI to provide a more robust navigation signal,” said Pranav Gokhale, general manager of computing at Infleqtion. “There is a big gap between an inertial measurement unit and a full inertial navigation system, so we’re using AI to fill that gap.”
Alternatively, magnetic navigation, or MagNav, works much like terrain-following radar, comparing real-time sensor data to a known map to pinpoint location.
But instead of elevation, the aircraft senses subtle magnetic fluctuations in the Earth’s crust — variations caused by geology, mineral deposits and even human infrastructure — and compares its measurements to a corresponding map of that field.
Scientists believe that birds can use their ability to sense the Earth’s magnetic field to navigate in a similar way. Magnetic field maps of the globe are frequently done for mineral, oil and gas surveys, as small anomalies in the field can indicate resources underground. But there are areas where high-resolution maps can be hard to come by.
“Map quality in the region you’re going to is definitely a factor that gets plugged into how well magnetic navigation can perform,” Devine said.
He identified a list of other key variables, such as the type of aircraft being used, plus its altitude and speed, as additional points of consideration for MagNav technology. At the same time, he said the importance of these tools is likely to grow as electronic warfare strategies become even more entrenched.
“We’ve validated that we can do real-time navigation with this technology,” Devine said. “And that’s huge, because the need for it is only going to increase.”
Intellian Technologies Inc., a leading global provider of satellite communication antennas and ground gateway solutions, and Eutelsat, a GEO-LEO operator in satellite communications, have developed a portable, fully integrated military-grade Manpack for Eutelsat’s OneWeb low-Earth orbit (LEO) network.
With auto detected resilient GNSS (R-GNSS), the military-grade unit enables external support of an alternative positioning, navigation and timing (Alt-PNT) to ensure operation in GPS-denied environments.
Developed for defense and government, the unit provides the uninterrupted, dependable Eutelsat OneWeb LEO connectivity. It was created to address the urgent need for next-generation LEO capabilities within the broader military satellite communications domain.
Designed for rapid deployment, the Manpack is small and light to fit a standard military rucksack. It features one-touch network acquisition for immediate operation even in demanding and high-pressure conflict regions. It is optimized for low power consumption to maximize mission duration for up to five hours on external batteries depending on usage.
Built to battlefield-ready specifications, the Manpack is designed for Ingress Protection (IP67), as well as the U.S. Military Standards for Environmental Engineering (MIL-STD-810H) and Electromagnetic Compatibility (MIL-STD-461). This ensures exceptional durability for Communications-On-The-Pause (COTP) to personnel on front lines and mission-critical operations.
Advanced Navigation is moving forward with plans to establish international positioning, navigation and timing (PNT) Centers of Excellence, with the UK location selection process currently underway.
The company is evaluating potential sites based on access to technical talent, logistics capabilities and proximity to major international airports. The final UK center location will be announced in late 2025, with additional global centers confirmed in early 2026.
Over the past year, Advanced Navigation has doubled its workforce and significantly expanded manufacturing capacity to address surging defense sector demand. The international COE network represents the next phase of the company’s growth strategy, positioning it to double its team again within 12 months.
“In an era of increasing complexity and contested environments, the ability to navigate with absolute certainty is becoming the world’s most critical strategic asset,” the company stated.
Building Supply Chain Resilience
To complement its Australian operations and establish robust onshore supply chains meeting local standards and security requirements, Advanced Navigation plans to partner with regional specialists in critical PNT sensing technologies, including:
Inertial sensing (optical gyroscopes and MEMS)
Vision-based sensing
Lidar and radar sensing
Acoustic Doppler velocity log sensing
The company emphasizes that navigation’s future depends on integrating diverse, adaptable sensor suites rather than relying on single technologies. Through its multi-sensor approach centered on inertial systems, the company aims to deliver resilience even in severe GPS-contested environments.
The expansion will accelerate innovation cycles, strengthen quality assurance and create opportunities for partners and research institutions across America and Europe to collaborate on breakthrough technologies.
Strengthening NATO Capabilities
The strategic expansion directly addresses NATO forces’ evolving operational needs. By establishing presence within U.S. and European industrial landscapes, Advanced Navigation aims to bolster critical infrastructure resilience while creating collaboration opportunities and jobs.
Beyond scaling production, the centers will focus on enabling seamless interoperability across NATO’s land, sea and air platforms, reducing integration time and costs for member nations. The COE network positions the company to power the next generation of autonomous systems and alternative PNT solutions worldwide.
Advanced Navigation said the Boreas D90 FOG INS represents the type of technology that will be developed and manufactured at these new facilities.