A roundup of recent products in the GNSS and inertial positioning industry from the March-April 2026 issue of GPS World magazine.
Surveying & Mapping
Mapping Application: High-precision GNSS for IOS and Android smartphones
FastXY can transform standard mobile devices into professional-grade data collection tools for geospatial information systems (GIS) and architecture, engineering and construction (AEC) professionals. FastXY offers professionals the ability to collect point, line and polygon data, and delivers advanced capabilities including 3D basemaps, construction staking, topographic surveying, on-the-fly datum transformations and survey-grade elevations. A built-in Bluetooth data parser allows users to configure the app to collect data from virtually any instrument supporting BLE Bluetooth or RS-232 — including echosounders, radiation sensors, laser rangefinders, barcode scanners and more — and marry that data instantly with precise GNSS coordinates. Available in free and premium versions.
Handheld scanner: Designed for BIM, indoor scanning and reality capture

The RS7 handheld SLAM (simultaneous localization and mapping) scanning solution was built for BIM documentation, indoor surveying, renovation planning and complex spatial analysis. It is designed to help professionals capture high-density 3D data efficiently and convert it into practical deliverables through CHCNAV’s software and cloud ecosystem. The RS7 integrates a next-generation lidar scanner capable of measuring up to 1.15 million points per second. Its wide field of view (360° x 189°) supports comprehensive coverage of floors, walls and ceilings, helping reduce the need for repeated passes and complex capture maneuvers in tight or cluttered spaces. The scanner also includes a high-precision inertial measurement unit with bias stability better than 0.5°/h. By combining lidar and inertial data, the system is designed to maintain stable motion estimation and consistent point-cloud quality in environments that challenge many mobile workflows, including long corridors, repetitive structures, and feature-limited interiors.
Mobile scanner: All-in-one system offers SLAM, LIDAR, RTK and 360 degree imagery

The GX1 is an integrated, highly accurate all-in-one mobile scanning system combining simultaneous localization and mapping (SLAM), lidar, real-time kinematic (RTK) georeferencing, cameras and software. It supports a seamless workflow, from capture to deliverable, and can reduce the time required to survey a site by up to 95%. The independently validated global accuracy of 5 mm to 10 mm
delivers the precision needed for topographic and road surveying, scan to building information models, construction progress tracking, and more. These capabilities are supported by integrated RTK georeferencing with real-time quality monitoring, four 20MP cameras for 360° panoramic imagery, and a proven SLAM algorithm. The GX1 has four deployment modes — backpack, survey pole, vehicle mount and supported handheld.
Quad-band GNSS rover: With support for Galileo high accuracy service

The SparkPNT TX2 quad-band GNSS rover combines an IP67-rated aluminum enclosure with support for Galileo’s High Accuracy Service (HAS) and standard RTK correction workflows. The receiver is built around the Quectel LG290P quad-band GNSS engine and supports multi-constellation tracking. Galileo HAS support provides sub-20 cm accuracy globally without subscription-based correction services, while RTK workflows via NTRIP or u-blox PointPerfect can achieve centimeter-level positioning. Battery life is rated at 50-plus hours, positioning the TX2 for multi-day field campaigns without recharging. The unit connects to iOS and Android devices via Bluetooth and WiFi, with compatibility reported for common GIS and data-collection applications. A notable design choice is the open-source firmware, which gives users visibility into how positioning data is processed and allows for customization and third-party integration. SparkFun has positioned this as an alternative to closed GNSS ecosystems where firmware and processing pipelines are not user-accessible.
Mobile
GNSS platform: Provides ultra-low power GNSS for all environments
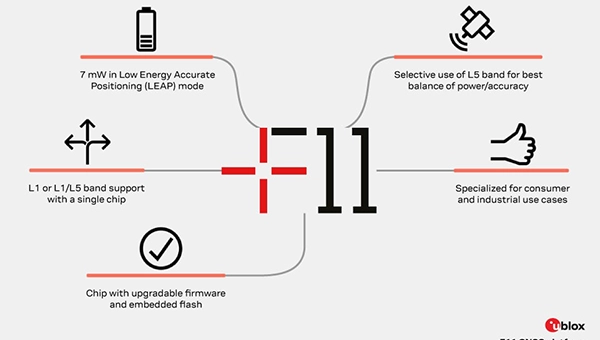
The u-blox F11 platform provides L1/L5 dual-band standardprecision GNSS to improve positioning accuracy while reducing power consumption to as low as 7 mW in typical configurations. It combines ultra-low power operation with intelligent signal management to meet the evolving demands of tracking, wearables, telematics and mobility applications — including micromobility solutions and drones. The platform enables device manufacturers to achieve longer battery life, faster and more reliable position fixes, and greater design flexibility. Its situationally aware GNSS architecture, with integrated geofencing and indoor detections, dynamically balance accuracy and power consumption. By selectively using dual band L1/L5 operation only when it helps maintain positioning performance, the platform reduces energy use while providing resilience and maintaining confidence in location data.
IOT platform: Combines GNSS, SBD and LTE-M

The Iridium 9604 is a compact, threein-one internet of things (IoT) module that integrates Iridium short burst data satellite service, LTE-M cellular connectivity, and GNSS positioning into a single platform. The Iridium 9604 seeks to make dual-mode IoT connectivity viable for price-sensitive, high-volume deployments. Built on the u blox SARA-R5 platform, the module comes in a compact 16 mm x 26 mm x 2.4 mm form factor, suitable for dual-mode IoT deployments across industrial, infrastructure and mobility applications.
L1+L5 GNSS modules: For trackers and high-precision IOT
Two dual-band positioning modules built on Airoha’s AG3335 chipset series are available: the ultracompact SE873K5-D and the high-end SE869eK5-DRK. Both support space- and power-constrained IOT devices and use cases that require continuous, ultraprecise positioning. The modules provide a scalable path to adopt dual-band L1 + L5 GNSS.
Timing
Cesium-less clock: An alternative to cesium-accuracy holdover clocks
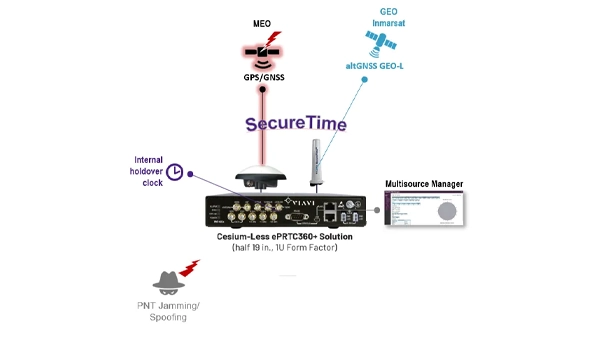
The patent-pending Cesium-less ePRTC360+ holdover solution is designed to safeguard atrisk infrastructure against the increased threat of GNSS timing disruptions. It is the only alternative to Cesium clocks to meet ITU-T G.8272.1 standards. It can protect critical power grids; transportation, aviation and public safety systems; 5G mobile networks; and AI data centers. It meets the international ITU-T G.8272.1 standard and has been successfully tested across a range of livesky defense and commercial jamming/spoofing environments. It has been integrated into VIAVI’s SecurePNT 6200 product series and can maintain 100 ns accuracy during GNSS-denied threats through the resilient altGNSS GEO-L service with no time limit.
Transportation
MEMS IMU module: For vehicles, ships and drones

The U4930 series is a reliable and cost-effective six-axis microelectromechanical system (MEMS) and inertial measurement unit (IMU) module for navigation, control and measurement of vehicles, ships and drones. Applications include vehicle/ship
attitude measurement, UAV attitude reference and trajectory control, mobile mapping, track inspection and underwater highprecision navigation. The U4930 series integrates high-performance MEMS gyroscopes and accelerometers within an independent structure. The three-axis MEMS gyroscopes sense the angular motion of the carrier, and the three-axis MEMS accelerometers sense the linear acceleration of the carrier. The system internally performs compensation for zero bias, scale factor, non-orthogonal error and acceleration-related terms across all temperature parameters, maintaining high measurement accuracy over a long period of time. The module supports custom communication protocols and provides synchronization for GPS/GNSS time data and pulse per second (PPS) signals.
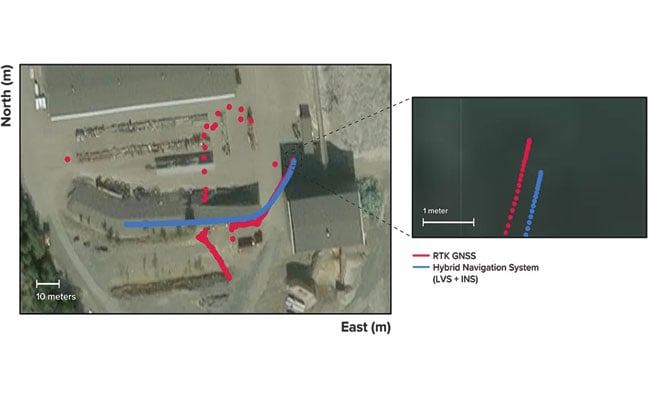
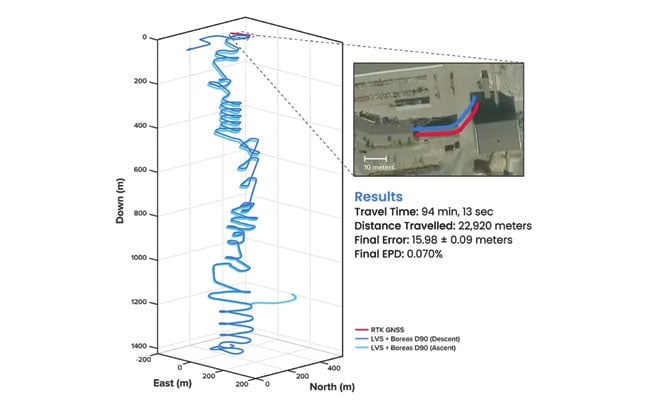
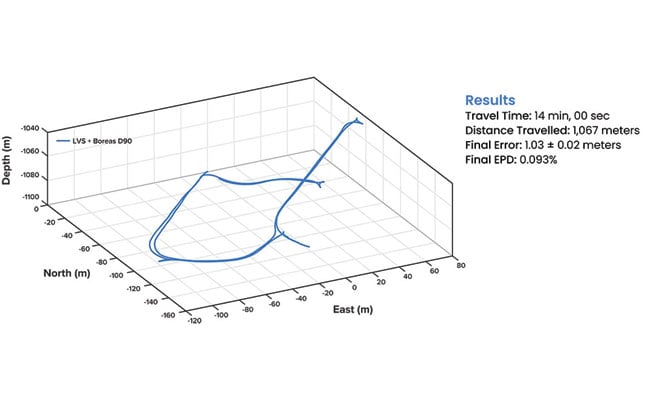
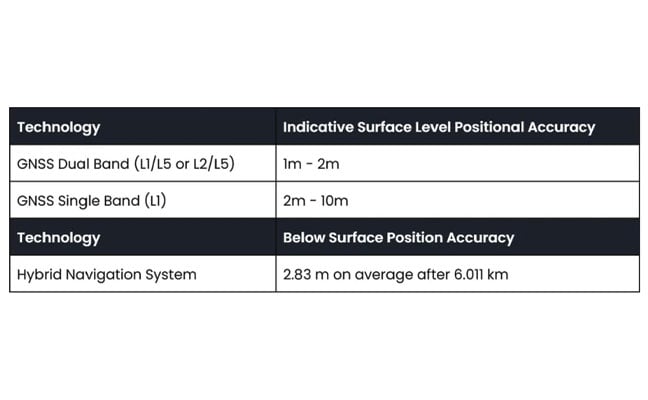
Underground navigation: For navigating mines and unmapped environments
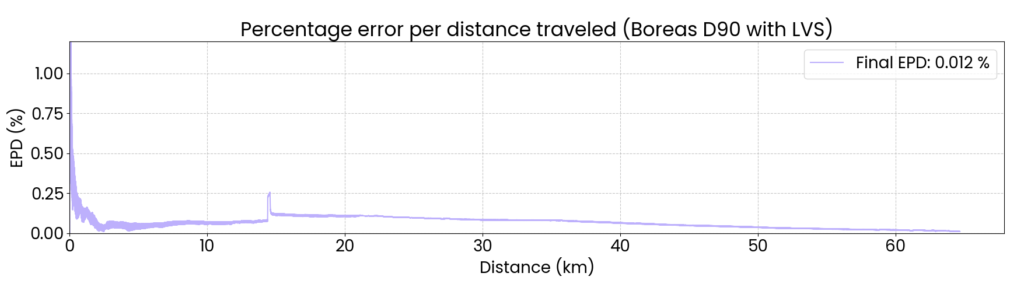
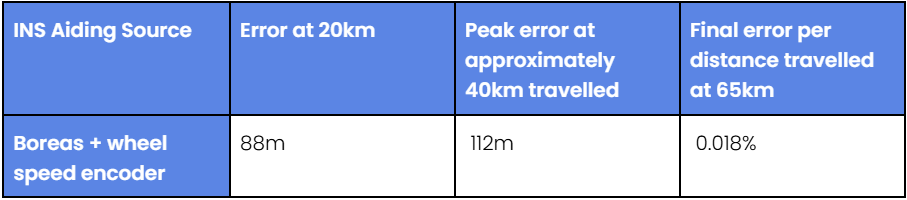
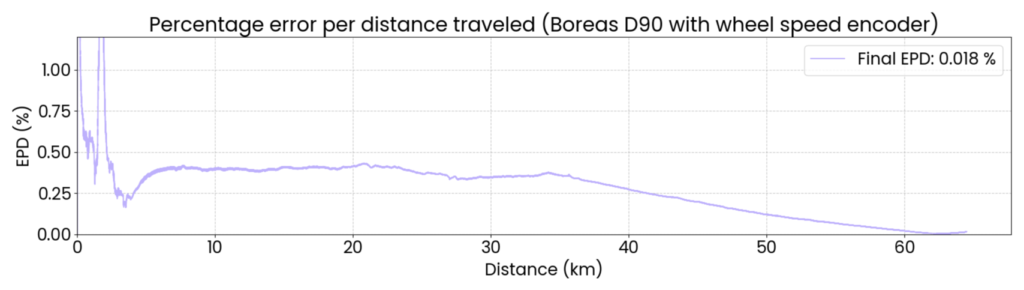
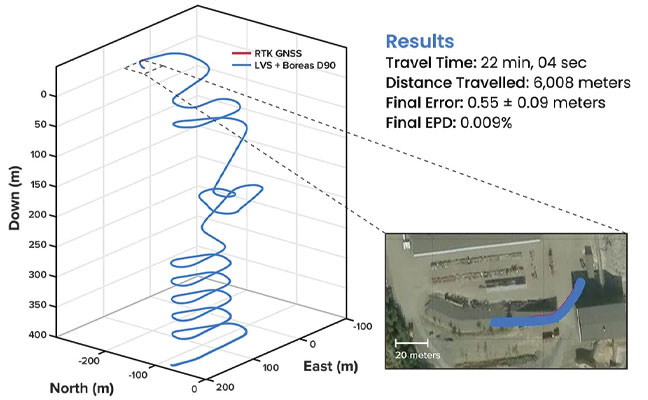
Chimera Land is a 3D laser velocity sensor (LVS) designed to solve the primary challenge for underground mining: maintaining precise vehicle positioning in deep,
dark and unmapped environments where GPS cannot reach. When fused with an Advanced Navigation inertial navigation system (INS), Chimera Land allows underground vehicles to maintain stable navigation over extended distances and time. Instead of needing to query an external beacon or satellite for its location, the sensor uses specialized lasers to measure a vehicle’s ground-relative 3D velocity with high accuracy. By feeding this precise data into the vehicle’s INS, the sensor eliminates the drift that typically comes with standalone INS. Using AdNav Intelligence, the result is a resilient, high-performance, infrastructure-light positioning solution that excels in the highdust, zero-light conditions typical of underground mines.
Simulators
GNSS test tool: Provides real-world testing with signals from the field
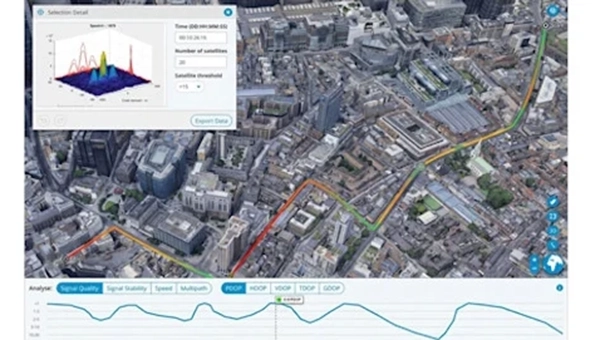
The SimXTRACT GNSS test tool bridges the gap between field and laboratory. It enables signals captured in field environments to be comprehensively decomposed into individual, discrete signals and applied to lab simulation for realism at every stage of the development test cycle. Developers usually rely on either RF record-and-playback or lab simulation for testing and validation of PNT systems and devices. SimXTRACT takes real signals captured in field environments and performs complex signal decomposition, breaking down each received signal into discrete line-of-sight and multipath ray paths, along with metadata such as Doppler offset, code error, power level and angle of arrival. This decomposed environment is then automatically converted into fully controllable simulation scenarios for Spirent GNSS simulators.
Autonomous
Inertial measurement unit: For unmanned air, land and sea

Honeywell launched the HGuide i700, an inertial measurement unit (IMU) that delivers high-accuracy performance for unmanned air, land and sea vehicles. By pairing near navigation-grade capability with a nolicense-required (NLR) classification, the HGuide i700 provides integrators worldwide with a new option for critical sensing and navigation. The HGuide i700 uses high reliability sensors and electronic architecture found in Honeywell’s HG3900 inertial measurement unit (IMU). Compact and low power, the HGuide i700 delivers near-navigationgrade accuracy and reliability while being optimized to support longer range navigation in GNSS-denied environments. The HGuide i700 offers strong GNSS-denied performance for by limiting maximum acceleration and spin rates in a license-free package. The latest in Honeywell’s HGuide suite of no-license inertial solutions, the HGuide i700 allows customers to streamline development cycles, simplify system architecture and transition to field deployment quickly. The HGuide i700’s rugged design, compact size and low-power profile make it suitable for diverse commercial, industrial and defense applications, including autonomous vehicles, mapping and surveying.
Anti-jam antenna system: Provides multi-constellation, multi-frequency GNSS signal protection

The GAJT-AE3 protects all major GNSS constellations from jamming with full multiconstellation, multi-frequency coverage, ensuring reliable PNT in demanding airborne environments. Its antenna electronics mitigate interference by creating up to seven nulls per band in the direction of jammers, providing significant anti-jam protection even in dynamic multi-jammer scenarios. The output is a protected radio frequency signal, free from jamming and suitable for input to modern and legacy GNSS receivers. The GAJT-AE3 protects and supports all GNSS frequencies, including L-band corrections and Iridium PNT.
OEM
GNSS board: All-band multifrequency reception and HAS-ready

Syslogic’s new all-band GNSS expansion board for rugged embedded computers is powered by the u-blox X20 receiver. It supports all major GNSS constellations and frequencies, including L1, L2, L5, L6 and L-band, and enables the use of the Galileo High Accuracy Service (HAS). It provides centimeter-level positioning, opening up new applications across industries such as autonomous field management, operation of construction machinery in remote areas, or navigation of automated guided vehicles and autonomous mobile robots. The GNSS board is designed for worldwide use. The integrated u-blox receiver supports modern correction techniques such as RTK, PPP-RTK and PPP. For the first time, it has been fully optimized for PointPerfect Global, u-blox’s proprietary high-precision GNSS correction service, delivering centimeter-level positioning anywhere in the world. This is particularly useful in remote areas without cellular coverage.
GNSS L1/L5 breakout: For meter-level positioning in embedded applications

The SparkFun GNSS L1/L5 Breakout – NEO-F10N (SMA) is a compact GNSS module designed for meter-level positioning accuracy in embedded applications. It uses dual-frequency L1 and L5 bands, with the L5 signal offering improved performance in urban environments due to reduced RF interference within the protected ARNS spectrum.
The board supports concurrent reception of GPS, Galileo and BeiDou, and uses u blox dual-band multipath mitigation to enhance accuracy in challenging conditions. It features a single UART interface, with an onboard CH340 USB-to-serial converter for easy connection to a computer, and standard pin headers for integration with external systems.
The module includes an SMA connector for secure antenna attachment and is configurable using u-blox u-center software.
















 High-Dynamics MEMS Gyro
High-Dynamics MEMS Gyro Anti-Jamming
Anti-Jamming Triple-Band RTK Receivers
Triple-Band RTK Receivers OEM GNSS Antenna
OEM GNSS Antenna OEMs
OEMs Direct Georeferencing Solution
Direct Georeferencing Solution Fixed-Wing UAV
Fixed-Wing UAV GNSS Receiver
GNSS Receiver USV
USV Laser RTK
Laser RTK UAV Lidar Scanner
UAV Lidar Scanner Receiver
Receiver Software Solution
Software Solution