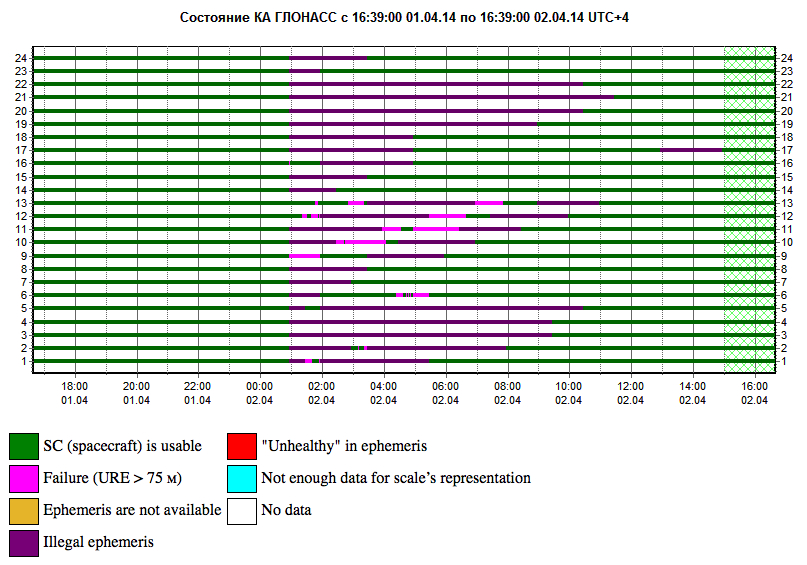
Yesterday we posted news of an 11-hour downtime for the full GLONASS constellation, due to an upload of bad ephemerides. Coincidentally, during that 11-hour period, the mass-market chip company Broadcom was conducting multi-constellation receiver tests in Asia. Frank van Diggelen, Broadcom’s chief GNSS scientist and vice president says, “We have definitive data to show how a multi-constellation receiver survives such an outage.”
Here are the pictures, and the story they tell.
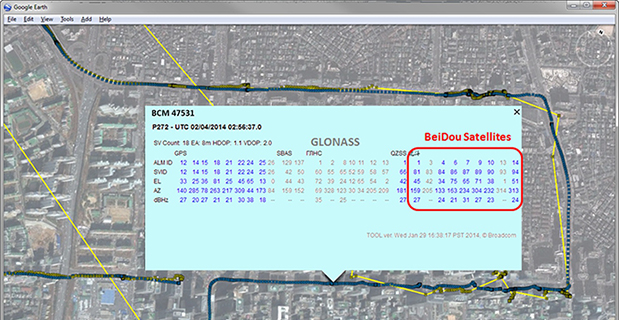
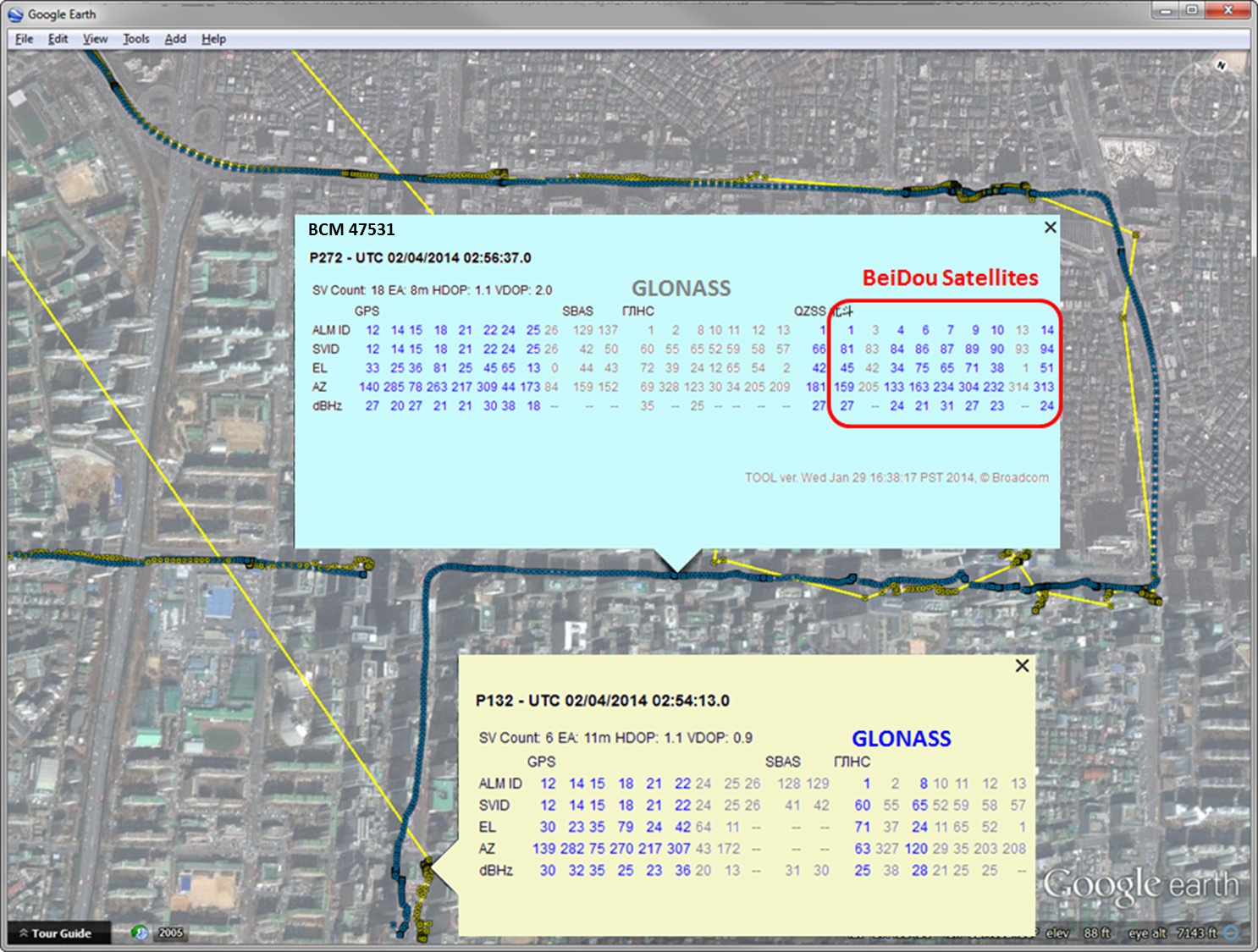
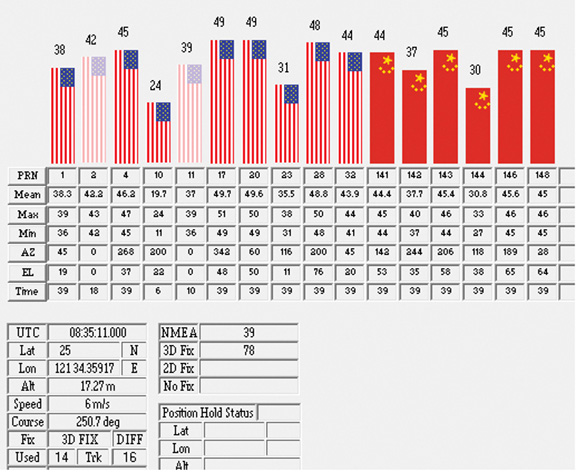
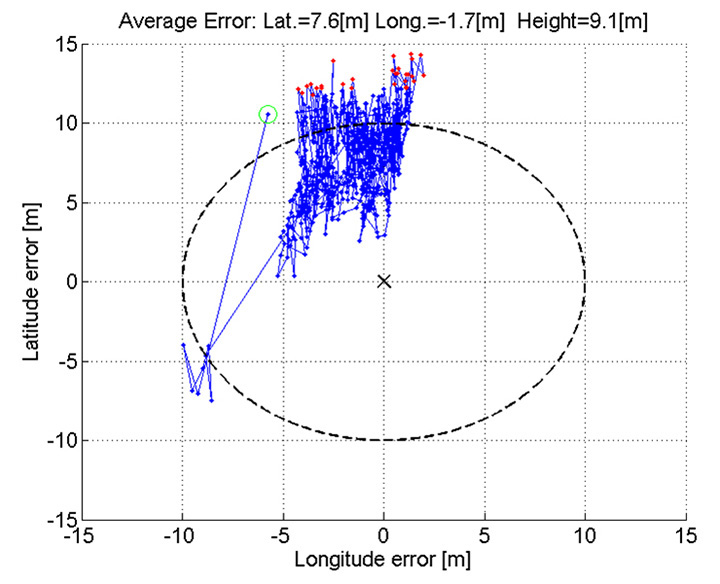
Test data coincident with the GLONASS ephemeris disruption of April 1 and 2 showing conclusively how a GPS/GLONASS/QZSS/BEIDOU receiver survives the complete disruption of one of the constellations.
On April 2 at 1:00 a.m. Moscow time, bad ephemeris was uploaded to all satellites (see chart at the bottom of this story).
There are two receivers shown here, from two different manufacturers, both in smartphones. The yellow dots are for a GPS/GLONASS receiver; the blue dots are from the Broadcom 47531 receiver which tracks GPS/GLONASS/QZSS/BeiDou signals simultaneously. The 47531 receiver includes logic to use redundant measurements to check the validity of all measurements. It successfully identified and removed the bad GLONASS ephemeris 100 percent of the time, as can be seen by the continuity and accuracy of the positions.
Here is the satellite outage chart from yesterday’s story. All GLONASS satellites were restored to healthy state after the 11-hour interruption.
Current plot from the Roscosmos GLONASS Information-Analytical Centre. Things are almost back to normal this morning.
In the mass market, individuals around the world are creating vast quantities of location data and GPS traces using not only GPS, but also Russia’s GLONASS, Europe’s Galileo, China’s Compass, and India’s Regional Navigational Satellite System. The value of this data and the value chains that produce it will increase significantly with an increase in interoperability of these satnav systems. Currently, non-interoperability represents a serious obstacle to the growth of the GPS market.
The overall system-of-system’s diversity of data formats, data models, processing models and associated custom- built one-to-one communication interfaces significantly inhibits introduction of new subsystems and also new GPS-dependent systems that would support development of future classes of stakeholders. “Many-to-many” networks based on open standards can create interoperability as well as opportunities for the introduction of new technologies, value-added data products, and new users.
To address this problem, sponsors of the 2012 Open Geospatial Consortium (OGC) OWS-9 Interoperability Testbed, including the U.S. National Geospatial-Intelligence Agency (NGA), documented a set of use cases and associated interoperability requirements, selected strategically to address problems whose solutions would be applicable in a wide variety of GPS value chains.
Technology providers participating in the testbed then implemented standards-based solutions that addressed the requirements. These were documented in a draft Engineering Report, “Use of SWE Common and SensorML for GPS Messaging.” The document focuses on the use of the OGC Sensor Web Enablement (SWE) Common Data 2.0 encodings to support an interoperable messaging description and encoding for the next-generation GPS message streams into and out of processing services that provide improved GPS navigation accuracy.
Standards. The OGC Sensor Web Enablement (SWE) suite of standards specifies models and XML encodings that provide a framework within which the geometric, dynamic, and observational characteristics of all types of sensors and sensor systems can be defined.
Furthermore, through standard web-service interfaces, one can task sensor and actuator systems and have immediate access to observations and alerts. SWE standards, now widely implemented around the world, enable developers to make all types of networked sensors, transducers, and sensor data repositories discoverable, accessible, and usable via the Web or other networks. OGC standards are downloadable at no charge, for use by anyone.
OGC Testbed
The OGC OWS-9 testbed’s OWS Innovations thread included a hands-on prototyping activity that addressed a particular set of interoperability requirements related to GPS accuracy.
GPS relies on accurate knowledge regarding the position, measured time, and state of the satellites, provided to GPS devices and processing centers in the form of satellite ephemeris data and status reports. The accuracy of the system relies on communication between the satellites themselves, the data collection systems, the data processing centers, and the GPS devices that ultimately determine their own location. This communication is through various data streams that consist of predefined message structures and encodings.
The accuracy of the positions derived from GPS can be negatively affected by several well-known factors. Improvements to the derived positions within the current operational system can occur (1) through occasional (once a day or once every few hours) updates to the satellites’ clock and ephemeris on-board information, or (2) through post- processing for applications such as geodetic surveying or image processing and georectification. Efforts are underway to provide more timely updates to satellites or positioning devices to improve the accuracy of positioning in real-time.
The GPS Correction Process
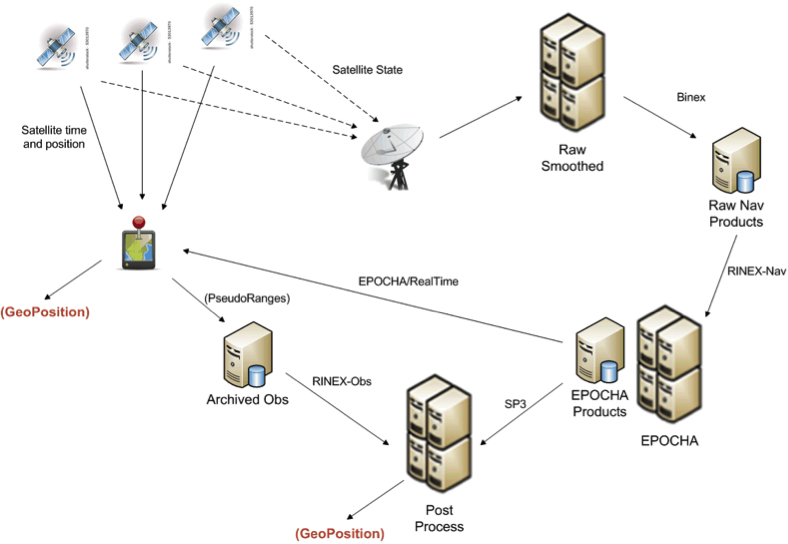
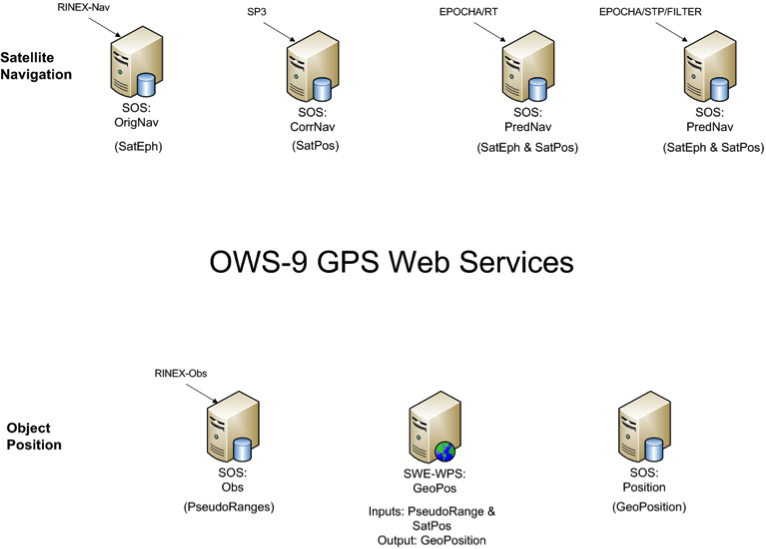
One view of the current system for correcting GPS positioning is provided in Figure 1. A GPS positioning unit (shown as a device with red thumb tack) receives signals from four or more GPS satellites derives its position. In addition, the information being sent by all satellites in the GPS system is also received at various receiving stations, stored as raw navigation data, and used to correct the clock and position information for all of the satellites. The correction process can utilize one or more operational processing systems for correcting satellite clock and ephemeris information. Each of these systems tends to utilize particular data sources and often output their results in different message structures and encodings.
FIGURE 1. Typical flow of data within the GPS correction system.
One such system for correcting the timing and positioning of GPS satellites is Estimation and Prediction of Orbits and Clocks to High Accuracy (EPOCHA). Currently, navigation and timing improvements are only uploaded to the satellites and GPS devices once a day. To improve the EPOCHA system, the National Geospatial Intelligence Agency (NGA) is researching the logistics and benefits of updating the navigation and timing information at much shorter time frames (for example, every 2–15 minutes).
The corrected satellite clock and state data can then be sent to the satellites, to the processing centers to improve geolocation of real-time or archived positions or remotely sensed observations, and to devices in the field to improve real-time position measurements.
A processing system in widespread use for applying these corrections to positional measurements is the open-source GPS Toolkit (GPSTk). This software was used in OWS-9 to demonstrate the processing of SWE Common encoded GPS data within a Web-enabled environment.
As shown in Figure 1, the data flowing between archiving and processing components exist in a wide variety of formats. Currently, these message streams consist of message structures defined through various documents, some of which have restricted access. Additionally, these streams and the messages they contain are being encoded in various formats, including, for example, a binary exchange format (BINEX), a system-specific XML schema, an HDF5 file format, several text-based formats, and others.
The message components within each of these formats are inconsistent, even though two messages may describe similar information. Often a processing system is required to read data and output results in multiple formats and to understand the inconsistencies between them.
By forcing different software and processing systems to support multiple message structures and data formats, the current system inhibits the effective use of these data by:
requiring several format-specific readers and writers to be developed in the appropriate software language (C, C++, Java, Python) as required by each application system;
providing inconsistent message structures between the data used or produced by different processing systems;
requiring meticulous and thus error-prone human interpretation of the data components based on the limited documentation provided for each;
creating lack of interoperability with regard to using data designed for or produced by a different particular processing system; and
discouraging development of new and innovative software and processing solutions.
The Engineering Report addresses the feasibility of using the OGC SWE Common Data v2.0 standard to support all message and data streams within future generations of the GPS operational network. In particular, the effort focuses on message streams that provide input to and output from the processing systems responsible for providing improved position and time accuracy within the GPS network.
Here are the benefits of the SWE Common Data standard:
The data can be fully described in a machine- and human- readable XML document providing: data type, units, constraints, semantics, quality, labels, and so on; and an unambiguous definition of both the data structure and encoding of messages/records.
The data values themselves can be encoded in highly efficient binary or ASCII text blocks or streams.
A single software application is able to read any data described in SWE Common data.
Any process can be described in SensorML using SWE Common as inputs, outputs, and parameters.
Any SensorML-defined process can participate in easily-defined executable workflows.
The Engineering Report describes the formats and how they were encoded, and the Web services created to move data between various GPS processing systems (FIGURE 2).
FIGURE 2. Collection of SWE services providing on-demand access to all GPS-related data in the project.
Conclusions
A common standards framework for all data files and streams within the GPS system would significantly improve interoperability between data centers, processing centers, and user tools.
In addition to a common encoding, common models for equivalent message or data records would also be important for interoperability among data, processing centers, and the tools. Common models and a common data framework enable rapid reconfiguration of workflows using different GPS processing products. Likewise, the availability of a common Web service interface enables one to rapidly and flexibly request specific data products and feed them into an executable workflow.
Here are further benefits:
SWE Common Data framework is fully self-described and machine readable.
Common models for all data would support “mix-and-match” capabilities within the processing workflows.
SWE Web services enable on-demand access to various GPS data products using a common framework.
SWE Common Data enables use of SensorML for readily defining and executing various workflows on demand.
Future Directions
Further research and development should move closer to a highly interoperable GNSS system that meets the needs of a broader community of users and enables the development of new supporting software by outside communities. Thus the following are recommended:
Design and reach consensus on consistent data models for all message types in navigation, observation, and state data streams.
Incorporate SWE Common Data readers/writers in the GPSTk toolkit.
Create SensorML descriptions for GPSTk apps.
Demonstrate on-demand design and execution of SensorML-defined workflows for GPS correction.
Demonstrate on-demand geolocation of UAV, ground-vehicle, and hand- held sensors using SWE services and encodings.
Some of these needs will be addressed in the OWS-10 Testbed that is currently ramping up in the OGC.
MIKE BOTTS is president and CTO of Botts Innovative Research, Inc, specializing in the design and application of open standards for sensor systems. He is the creator and chief architect of Sensor Model Language (SensorML), an OGC technical standard for describing the measurement and processing of observations from virtually any sensor system.
The R&S SMBV100A vector signal generator can generate Galileo, GPS, and GLONASS signals for up to 24 satellites in real time. With the SMBV-K107 option, the simulator covers the BeiDou standard as well.
The R&S SMBV-K101 option allows developers in the automotive and wireless communications industries to test GNSS receivers for specific effects such as obscuration and multipath propagation. If the GNSS receiver of a navigation instrument or smartphone is located inside a vehicle, testing must also take into account the obscuring effect of the vehicle’s metal body. The R&S SMBV-K102 option can simulate this obscuration and, if required, the additional antenna pattern.
In addition to test scenarios for A-GPS, smartphone developers have the Assisted Galileo (R&S SMBV-K67) and Assisted GLONASS (R&S SMBV-K95) options at their disposal.
Galileo Growth, Constellation Updates, and Jamming
I used to spend quite a lot of time in Munich working on a multi-national, multi-role fighter aircraft program, so returning for this year’s Munich Satellite Navigation Summit stirred some good memories for me.
Held in the opulent Residenz Muenchen March 25-27, the conference always has a special atmosphere that these historic 1385 surroundings convey to the attendees. The former royal palace of Bavarian monarchs, the whole complex has ten courtyards and 130 rooms. The summit was held in the Max-Joseph Hall, which took a little bit of work to find at first, wandering around the huge complex. One wing of the building hosts a theater, and the mainhall is the primary concert venue for the Bavarian Radio Symphony Orchestra. Overall, this is a delightful setting.
Munich is in the Southern German state of Bavaria, and Bavaria has taken a real interest in the promotion and success of Galileo; witness the extensive Bavarian booth at recent European and North American GNSS conferences. Germany has, of course, been one of the principle nations providing significant funding for Galileo from its inception.
Ilse Aigner
So with this backdrop, the summit brings together people involved with GNSS from around the world to report on the current status of GNSS and to relate how their participation in satellite navigation has progressed. And, of course, Europe, Germany, Bavaria and the European GNSS industry, which is now recognized around the world, all take the opportunity to present their capabilities and successes.
The plenary session on the first evening covered GNSS, Earth Observation (EO) and Telecommunications — with the panel headed by Ilse Aigner, Bavarian State Minister of Economic Affairs and Media, Energy and Technology — an extensive mandate, even for a state-certified engineer who used to work for Eurocopter.
Dr. Merith Niehuss, speaking at the opening of the summit. (copyright: Munich Satellite Navigation Summit).
The host of the summit is actually the University of the German Army in Munich, and we received a warm welcome from two leading professors: Dr. Bernd Eissfeller and Dr. Merith Niehuss, the president. The theme of the summit was to move from implementation to utilization, and in typical European form, all parties were looking to shower potential users with funded solutions to problems of which users are not yet aware — so users clearly need government-provided education, pilot projects and funding. Not exactly a North American concept, where we tend to encourage users to buy our innovative stuff by demonstrating how it can save them money or earn them more revenue.
The European Commission, ESA, DLR, European GNSS Agency (GSA), Airbus, OHB, and Telespazio were also represented. The minister did indeed associate with and praise the local area, claimed 1,000 jobs created related to Galileo through an incubation center at Oberpfaffenhofen, and declared Bavarian support for satellite navigation.
Other important things mentioned by the panel at the plenary included an €11B budget for Galileo/EGNOS and Copernicus (EO project) under the Horizon 2020 program, and an intent to declare Early Service for Galileo before the end of this year with two or three dual Galileo satellite launches — the first two FOC (production) SVs should go to the European launch center in Kourou in April in preparation for launch around June. I heard in a corridor that launches may be planned for June, October and December, but an EU spokesman later said that there would only be two launches this year. OHB now has the contract to build 22 FOC Galileo SVs, each with a design life of 14 years, and they are bullish on their ability to deliver on time and budget.
The program continued the following day with constellation updates from GPS, Galileo, Beidou and the UN International Committee on GNSS (ICG) — GLONASS delegates were notably absent. There was much speculation that they declined to attend due to the Crimean situation, and one U.S. delegate even inferred that they were “uninvited.”
Constellation Updates
GPS: It’s estimated that there are ~2B GPS receivers in use, and there may be ~10B by 2020. A return on investment (ROI) analysis is currently underway, but a rough guess is that costs are in the tens of billions, while annual returns are of the order of $60-100B/year. Another IIF satellite (SV) launched last month, bringing the total to five SVs transmitting L1, L2C and L5, with seven more to come, and multiple launches are expected this year. There are 30 operational SVs on orbit, signal performance significantly exceeds the specs, and consistent, dependable performance has been provided for more than 20 years.
Galileo: First fix was achieved March 12, 2013, with four SVs, two (maybe three?) launches of two SVs each planned for 2014, and early operational capability to be declared by end of this year. €7B in funding is provisioned for 2014-2020, with 16-24 operational ground stations, Commercial Service (CS) planned by 2016 (more on this later), and a long-term evolution plan being worked up during this year.
BeiDou: Fourteen SVs are on orbit — five GEO, four MEO and five Inclined Geosynchronous Orbit (IGOS) satellites, providing dual-frequency services. Thirty total SVs are planned, and the intent is to provide open, compatible, interoperable signals with other GNSS free of charge. There was not much other news to report, other than that China intends to invest significantly in BeiDou to keep improving services.
United Nations ICG: Nine nations and European Union = International Committee on GNSS (ICG), with 20 other associate and observer States. Activities include GNSS compatibility/interoperability, GNSS enhancements, information sharing, and reference frames, timing and applications — lots of upcoming meetings and activities.
Regional and Augmentation Updates
WAAS: Phase IV is underway with GEO replenishment begun, introduction of L5 to replace L2, and replacement of obsolete component parts. One hundred GIII receivers were ordered with L1/L2C and L5 capability for delivery by September this year — and have capacity to also add Galileo. GIII receivers have already been fielded in six locations as part of initial integration testing. The Safety computer will also be upgraded starting this year. 3,912 LP/LPV approaches have been approved, of which 3,379 LPVs serve 1,667 airports. GBAS CAT I is progressing with four U.S. airport installations. System design approval began in January this year, and United Airlines has begun equipping over 90 B737/B787 for GPS approach and landing. Alternative Positioning, Navigation and Timing (APNT) investigations are underway (as a backup to GPS) with a hybrid DME-pseudolite configuration currently favored. Stanford University subsequently presented this and other concepts.
EGNOS: A €1.58B budget has been approved, and EGNOS V3 evolution is underway, with L1/L5 and GEO (SES 5 and Astra 5B) replenishment, a requirement to expand East and West and to the North to provide full coverage to all EU States.
About 100 EGNOS LPV approaches are approved — this year, it’s hoped to add 150 more.
QZSS: The operational concept has been proven with the first IGOS SV (Michibiki), so Japan is moving forward quickly to add another three SVs (3xIGOS and 1xGEO) and ultimately would like to have a total of seven SVs in orbit providing QZSS services. L1/L1C/L2C/L5 signals are identical to GPS, and L1s/L5s are augmentation signals, while L6 is proposed to be similar to Galileo E6, providing centimeter-level PPP-type service. QZSS essentially is intended to provide higher elevation satellites to improve urban navigation in dense cities.
IRNSS: Coverage extends 1500 km beyond India. The target is <20-meter accuracy, and signals are in L5 and S band and can be used independently or in dual-frequency combinations. A second IRNSS-1B GEO satellite is scheduled to launch on April 4.
GAGAN: The Indian SBAS was commissioned and certified in February this year with a number of ground stations, redundant uplinks and two on-orbit GSAT 8 and 10 GEOs. Gagan is now qualified to provide RNP0.1 (navigation accuracy to 0.1 miles).
QZSS and Japan’s Space Policy
This session provided some detail on how changes in Japan’s Basic Space Law has lead to efforts to expand the use of space and derive further economic benefits that this provides.
Munich Highlights
A collection of examples of Bavarian GNSS innovations followed in a very interesting session led off by an overview of Business Incubation Centers and their collaboration with government agencies and research centers. Small business start-ups are apparently encouraged to apply during four annual time-slots, and receive two years’ incubation support and cash incentives. This has lead to 81 new ventures and has apparently been the source of the 1,000 new jobs mentioned by the Minister of Economic Affairs. The annual European Satellite Navigation Competition and Galileo Masters competition have also generated a whole bunch of ideas and concepts (8,000), some of which have found support through this incubation process.
Airbus Defence gave a short overview of the testing work it accomplished in supporting the first Galileo fix and has prepared several vehicle test platforms, ready to take the next phase of Galileo testing to the streets in realistic, real-world environments.
DLR provided insights into a number of its activities, namely:
Iono mapping
Signal distortion
Multipath
Jammer mitigation – adaptive antenna and processing
GNSS repeaters – how they can become unintentional jammers
Spoofer and Multipath inbvestigations
Antenna designs
GNSS evolution – Maser and clock combination benefits
Army University of Munich discussed radio science experiments in the Solar System and experiments using Mars Express (above) in polar orbit around Mars and resulting measurements of the moon Phobos. Internal and external outreach efforts with numerous organizations were also mentioned.
IFEN provided more down-to-Earth information on the on-going activities at the GATE ground-based pseudolite range, which has enabled realistic outdoors testing of Galileo receivers, well in advance of signals from orbiting satellites. Recent testing has now been able to include the four operating Galileo SVs on orbit with GATE pseudolite signals. GATE will continue to evolve over the next few years to keep up as more Galileo orbital signals come on-line.
Fraunhofer presented information on its 40-channel GPS/Galileo/GLONASS chip-receiver (above) – claiming 1-meter accuracy, low-cost, robust reliable position solution, small form-factor and low-power. Following PRS test-bed development efforts, Fraunhofer has now received a contract to also deliver 20 pre-operational Galileo PRS receivers for use in initial pilot projects.
GNSS Interference
Vidal Ashkenazi, in his inimitable form, lead a panel discussion on interference, jamming (in particular Personal Privacy Devices, or PPD) and spoofing, and coaxed his panel members to provide a whole bunch of information on what’s being done, mitigation capabilities and potential enforcement. Unlike all the other sessions, Vidal’s panel members didn’t use presentations, but rather responded to wide-ranging questions on the subject from the session chair.
David Turner, representing the U.S. State Department, indicated that the ICG will meet shortly in Geneva hosted by the International Telecommunication Union (ITU) to focus on interference, jamming and mitigation. The recourse that nations have for use of PPDs by their people is the law — jammers are illegal, sale and purchase of them is illegal — however, Internet sales are very difficult to police. So detection and mitigation are required to find and shut them down. Dave’s presentation on the GPS.gov website indicates that the ICG is working on an education program for states to inform about GNSS sensitivity to interference and the threat to critical infrastructure if they are allowed to operate. The ICG also has a task force on detection, reporting and systems development.
ISRO indicated that PPD jammers in India are restricted, but permitted for gatherings such as at churches where personal safety may be an issue. Ground-based detection is needed, as well as stronger legal protection that may well prohibit use of PPDs altogether.
Japan Aerospace Exploration Agency (JAXA) indicated that it is working on “signal proofing” for QZSS.
BeiDou said it is building a monitor network in China that will detect jamming.
There was a general discussion on whether receiver manufacturers should be mandated to make receivers that are resilient to jamming – many thought that there have already been significant advances in that direction by manufacturers. The normal approach would be to develop requirements with industry, agency and user inputs, publish them, and call up the requirements in equipment specifications. In the U.S., the Department of Homeland Security is seeking an approach to detection and location.
Legal Impacts of Personal Privacy Devices (PPDs)
While the audience may have had high hopes that the legal eagles could come up with some magic prevention and prosecution solution, the next session was more of a legal background briefing without any concrete conclusions (quite similar to other discussions I’ve had with some lawyers in the past, actually).
The first briefing was from the European Commission/European Union, who indicated that the EU doesn’t own the frequency rights to Galileo (Oh Oh…). They have to operate through a member state, which gets the rights through the International Telecommunication Union (ITU) and then licenses use to the EU — the bottom line being that EU enforcement of jamming protection laws maybe be difficult, as the legal framework only exists at the national level for each state. The EU is trying to get recognition under another class of ITU membership.
EU regulations were presented that state that GNSS re-transmitters can only be operated legally by governments or government contractors. Or can be used indoors for indoor navigation, but only for emergency services at fixed sites which are pre-approved. Pseudolites can only be operated indoors, and there should be no interference to other systems. Jammers are forbidden and cannot be placed on the market for sale.
Eurocontrol had a lot to say about the impact on aviation navigation infrastructure and receivers on aircraft. Existing ground nav aids have limitations, the worldwide equipment infrastructure is becoming quite old — aviation has generally moved away to GNSS and inertial based navigation and uses ground navaids as backup. There is a conflict between regulating GNSS heavily for aviation and how people want to use it in the commercial world. We may have to consider a trade-off between heavily restricted GNSS operations, and wide open commercial GNSS applications.
David Sobel, from Electronic Frontier Foundation in the U.S., presented the contrary case for individual privacy. His argument is that sale of tracking devices is unregulated and can readily be purchased, so people may presumably use them to track others, thereby infringing their privacy. So why shouldn’t people be able to “defend their privacy” by use of PPDs?
Say an employer insists that a vehicle you are driving have a tracking device so he knows where you are. Isn’t the driver also justified in trying to protect his privacy? Since the police in the U.S. can no longer place tracking equipment on suspect vehicles without a warrant, tracking appears to be down to private individuals or companies, who it would appear, have the legal ability to attach tracking devices under most circumstances. So the argument goes that if people have a legitimate concern about privacy, there should be acceptable provisions to allow them to disrupt tracking.
If there is a service such as road tolling, there is an incentive for people to avoid these costs. So systems should be robust enough to avoid disruption. Enforcement is a problem — should police chase people they suspect have jammers, or should they rather chase criminals or help and protect citizens? Mitigation systems need testing, so to test these systems there has to be jamming transmission — which needs to be controlled and regulated. Restricting the import of bad devices into a country might be desired, but the manufacturing countries don’t tend to want to restrict exports as exports help their economy. Again, the argument seems to be that of personal privacy over potential risks and damages to society.
No solutions, but a healthy discussion of views from a legal perspective.
Precise Point Positioning (PPP)
The group discussing PPP options consisted of the GSA (charged with exploitation of Galileo services), several principle industry service providers of PPP, and the federal agency, which provides PPP-like services in Germany.
The GSA presented its ideas concerning the provision of high-accuracy PPP corrections over the Galileo E6 signal – the so-called Commercial Service (CS). The intent, however, would not be to disrupt the commercial marketplace. Nevertheless, GSA is proposing a public-funded service to be sold to users within a market that is already well served by commercial worldwide service providers who charge users for cm-level PPP service.
And while Trimble made a polite presentation on the many levels of capabilities of its TerraSat services, as did Veripos and to some extent Fugro, it was clear that the commercial providers are not eager to find competition in their market from a government entity. NovAtel also chimed in on this conflict as it will be involved in Veripos/TerraStar, following its acquisition by Hexagon. Fugro appeared to be interested in acquiring rights to distribute CS on behalf of GSA.
The German Federal agency promoted open data, source and standards from the IGS network to which it contributes: IGS is supported by numerous national agencies around the world. Orbit and clock PPP service is available 24/7 from multiple sources. However, the service is offered on a best efforts basis without a service guarantee, and cannot achieve the accuracies or convergence times of commercial services.
I talked subsequently with Michael Ritter, CEO of NovAtel, to learn the background to the Veripos/TerraStar acquisition. It’s clear that providing PPP services means added value to NovAtel when they sell receivers with PPP capability, so they will quickly discontinue offering Omnistar subscriptions and will shortly launch NovAtel Correct, offering Veripos (marine) and TerraStar (land) PPP subscription services. NovAtel is making significant inroads in the agriculture segment, and they see PPP service as an essential element of this and other businesses. The acquisition was worth something on the order of $200 million, so there is a vested interest in making these services pay and discouraging GSA entry into this market. Veripos will continue supplying other GNSS OEM receiver manufacturers — notably Septentrio, who use TerraStar services, now also NovAtel, and potentially another major GNSS manufacturer.
Future of GNSS in User Segment
Chaired by Greg Turetzky of Intel, this session opened the third day of the Summit. The presenters offered their concepts for current and future GNSS equipment and systems.
Stanford University outlined its work with FAA on an alternate PNT system to be used as a back-up to GNSS. It used to be that GNSS systems were designed to overcome space-weather effects and faults in equipment design or manufacture — nowadays, there are “bad guys” out there and we need to “protect, toughen and augment” these systems. Antennas can be built that impart a specific signature to the signals they transmit, and this may aid in finding and prosecuting the bad guys, but the main focus of work is development of a hybrid system using Distance Measuring Equipment (DME) and a pseudolite.
Tests have demonstrated good performance, and these prototype efforts could lead to aviation requirements (MOPS) development by 2018 and deployment by 2020.
Septentrio has been involved in Galileo since it began and was the first company with Galileo receivers. Nowadays, they have receivers fielded in multiple commercial applications, including machine control, maritime, aviation, automation, and measurement, delivering accuracies from a meter down to a centimeter. They will add E6 to their AsteRx family of multiple-channel, multi-frequency, multi-constellation receivers, and have developed a number of hardware and software mitigation techniques to combat jamming, interference and multipath, and to integrate receivers with inertial units for aiding.
Furuno is interested in resilient PNT for marine applications, and has examined the use of eLoran as an alternative to GPS, but has moved towards a system of radar beacons that detect radar pulses from passing ships and transmit their positions, enabling position determination. In tests, accuracies of around 2 meters have been obtained with two beacons.
Quascom’s approach is to add firewalls inside receivers, which toughen the processing and prevent distortion of position information. Quascom believes this will be necessary until authentication can be added into the GNSS system itself, so that any data received is validated and is known to be good.
Chris Rizos from the University of New South Wales, Australia, drew attention to the “holes” that exist in GNSS, and reviewed a number of possible “Band-Aid” fixes, such as Wi-Fi especially for indoor location. However, his solution seems to be to establish terrestrial networks transmitting GNSS-like signals.
Eurocontrol indicated that aircraft currently use inertial and DME extensively as a back-up to GNSS navigation. By 2030, there will be multiple constellations, and dual-frequency use should become commonplace in aviation, so GNSS navigation should be much more robust. Aircraft approaches are required to be in conformance with Required Navigation Performance (RNP), so would it be possible to develop RNP procedures for DME and inertial to be used as back-up during approaches in the event GNSS is disrupted?
To conclude the session, Airbus provided a “starter course” overview on inertial systems – how they work, the range of different types available, what they can achieve, costs, strengths and weaknesses and integration with GNSS.
The summit continued with subsequent sessions on:
Space technologies and users
GNSS monitoring of Earth and disaster management
Copernicus – Earth Observation
GNSS Education
Unfortunately, my deadline didn’t allow me to attend these equally interesting presentations.
There is also a manufacturers’ exhibit area at the summit that just fits into a couple of corridors near the main hall – around 20 booths. I talked with several of the manufacturers, including Spirent who has launched its latest GSS9000 multi-frequency-constellation simulator, with a four-fold increase in system iteration rate over the previous model. Exhibitors appeared to be pleased to be at the summit and by the level of interest shown by the attendees.
So, as this year’s Munich Summit concludes, where does this leave us? We’ve learned some new things about several GNSS topics and heard some interesting new concepts. Europe appears to be now focused on users and applications, to ensure there is market growth and use of Galileo. What stands out for me is the contrast between how European governments go about GNSS and how North America and the commercial world does the same thing without as much direct influence. This is nothing new, of course, it’s just the European way…
Rx Networks, Inc., a mobile location technology and services company, has completed the upgrade of its GPStream Global Reference Network (GRN) to include the BeiDou constellation. A top-tier GNSS semiconductor vendor has already incorporated this new feature so its platform can take advantage of the extra satellites now available in the BeiDou constellation, the company said.
Global real-time assistance and high-accuracy long-term orbit and clock prediction products are now uniformly available across the GPS, GLONASS and BeiDou constellations. In the second quarter of 2014, BeiDou support will also extend to GPStream PGPS — Rx Networks’ popular synthetic A-GNSS software that has been deployed in more than 100 million smartphones and personal navigation devices worldwide.
In commercial service since 2006, the GPStream GRN is a collection of 26 highly reliable earth stations deployed in 21 countries. It forms the foundation underneath many of Rx Networks’ products, on which nearly a billion devices rely for their GNSS performance. The network is highly redundant and, combined with a carrier-grade service delivery network, is provided with a 99.999 percent service-level availability (SLA). A further upgrade, to support the European-run Galileo constellation, will be available later this year.
From network operators’ commercial and E911 location servers to GNSS chipset vendors and device OEMs, the addition of BeiDou means faster and higher availability GNSS location fixes.
“The addition of BeiDou to our existing GPStream GRN service meant a complete overhaul of our reference network and service delivery architecture while maintaining the 99.999 percent SLA we’re well known for,” commented Guylain Roy-MacHabee, CEO of Rx Networks. “As multi-GNSS chipsets come to market, there is commensurate requirement for a uniform, reliable and device-independent assistance data service like our GPStream GRN.”
BeiDou Releases Public Service Performance Document
In late December, director Ran Chengqi of China’s Satellite Navigation System Management Office announced the BeiDou Navigation Satellite System (BDS) Public Service Performance Standard. The document details the public service performance parameters of the BeiDou system, including service area, accuracy, integrity, continuity, and availability. It is a basic commitment to customers from BDS providers, but also an important basis for customers to choose, use, and evaluate the system performance.
Also released is Version 2 of the BDS Interface Control Document (ICD) for the Open Service Signal. Among other changes, it includes a description of the B2I signal on 1207.140 MHz.
The publishing of the Public Service Performance Standard, a common practice among GNSS operators, is also a prerequisite for BeiDou system involvement in international civil aviation, international maritime, 3rd Generation Mobile [phone] System, and other international standard-setting organization activities.
The document has Chinese and English versions. Because document download from the BDS government website can be difficult, Richard Langley has made them available at the University of New Brunswick website:
Analysis. John Lavrakas of Advanced Research Corporation posted the following comment to the online version of this news story:
“I took a quick look at comparing the BeiDou Open Service Performance Standard with the GPS Standard Positioning Service Performance Standard and obtained mixed results.
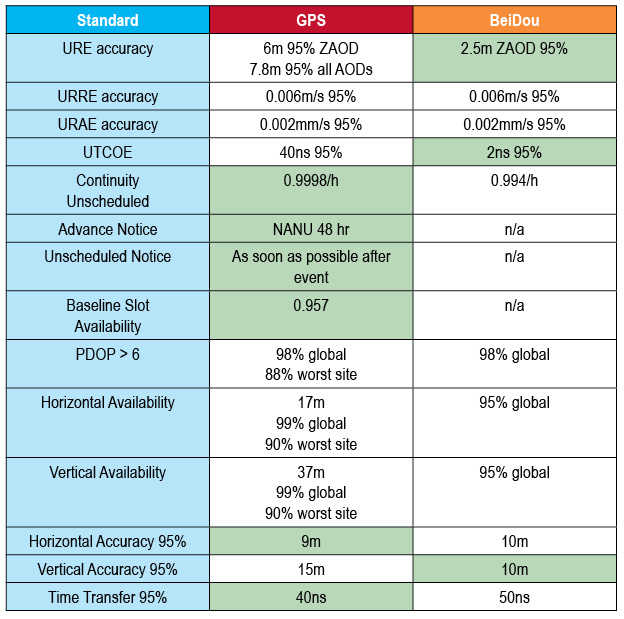
“In some cases, the commitments from BeiDou were stronger (URE accuracy, the table to show green for the GNSS service committing to a more stringent standard over the other vertical position), and in other cases the commitments from GPS were stronger (continuity of service, advance notice of outages).
Table 1. Coded to show green for the GNSS service committing to a more stringent standard over the other. Courtesy of Advanced Research Corporation.
Galileo to Sail, Penalty-Free
Schedule Overruns Not a Problem, Avers Space Agency Director-General
Athough the European Commission (EC) sternly put in place financial penalties for late delivery and arrival on orbit of Galileo satellites, the European Space Agency (ESA) that manages the process will not suffer the consequences of a one-year delay in their launch. The EC did not sign an industrial contract with the ESA for the Galileo work, according to an announcement by ESA Director-General Jean-Jacques Dordain made the announcement in mid-January 17.
Dordain said under the agreement, the EC pays for ESA’s staff costs, while ESA acts as technical manager for the program. But the industrial contract itself to build the satellites — and specifying the penalities — was not encompassed by this agreement.
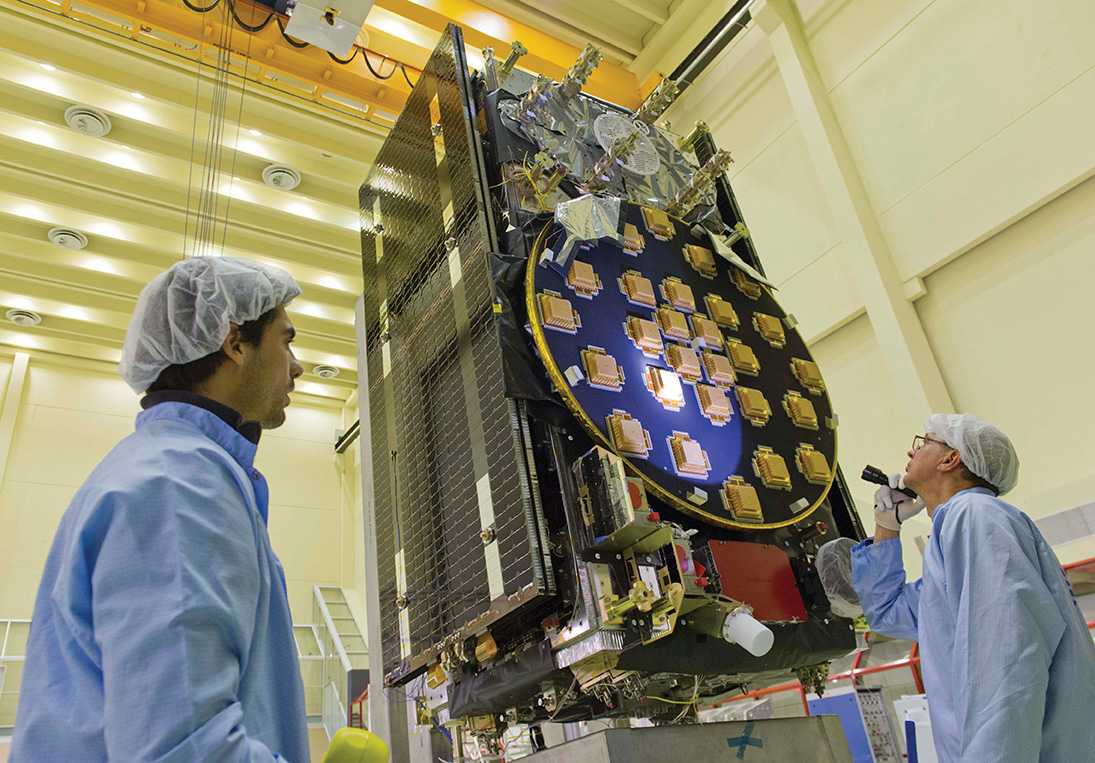
Galileo’s schedule is now firmly back on track, according to ESA,since the first OHB satellite passed thermal-vacuum testing in November, and the second satellite is in the test chamber. Signals are apparently “go” for their launch in June aboard Soyuz rocket from Guiana Space Center in South America. A second pair should launch in October, and a third in December.
Meeting an Aggressive Date. The EC committed some time ago to start initial Galileo services in 2014. Delivery on this promise has become increasingly unclear after recent testing delays. Getting new Soyuz launch dates withing this year is not a sure-fire thing, either.
The Galileo Supervisory Authority earlier announced that it had validated the four initial operating-capability (IOV) Galileo spacecraft in orbit as perform twice as well as expected in terms of signal accuracy. However, the satellites provide very limited use, about one hour per day when all are visible to the same user.
Once six satellites become visible inthe sky, sometime after the planned June launch, testing qualification of early services can begin. With eight, actual service qualification is possible but not certain. Finally, with 10 satellites — December? — early services may be able to start.
Earlier last year, EC Vice President Antonio Tajani had warned that financial penalties to those building Galileo would cover the cost overruns due to the delay in launching the system. His finger appeared to point at ESA as much as OHB AG of Germany and Surrey Satellite Technology Ltd. of Britain, who lead the industrial consortium building the satellites.
The main antenna of the second Galileo Full Operational Capability (FOC) satellite being inspected with a flashlight in advance of mass property testing at the European Space Agency’s ESTEC Test Centre in the Netherlands. Thermal-vacuum testing on the second model began in early 2014. The two FOC satellites will be launched on a Soyuz rocket from Europe’s French Guiana Spaceport in mid-2014. Whether four more can rise and begin providing initial Galileo services by the end of the year is the question of the hour.
U.S.Transport DepSec Takes Potshot at CNAV
The departing Deputy Secretary of Transportation, John Porcari, wrote a letter in the closing days of 2013 opposing the U.S. Air Force’s announced plans to begin broadcasting Civil Navigation (CNAV) message-populated L2C and L5 signals as early as April 2014. Military personnel are incensed over what they see as Porcari’s impugning, when not ignoring, the Air Force 35-year track record of broadcasting the gold standard of global navigation satellite signals — something in which Transportation has zero experience.
Porcari alludes in his December 27 letter to “non-standard engineering tools” and “non-standard operations” that he believes would come into play for early CNAV broadcast. “These have the potential to inject human error, which may result in unacceptable GPS constellation operation.”
What Porcari means by “non-standard” he does not specify, although he confesses to unease as “the ability to monitor these signals, [without which] the system will not know if the L2C and LS signals are within specification. Given these risks, DOT is concerned that the CNAV messages could provide hazardously misleading information, impacting GPS safety-of-life, protection of property, and economic security applications.” The full text of the Porcari letter is available here.
OCX Delay the Cause? Because the current GPS ground control system cannot generate CNAV, and the next-generation OCX —which can — will not be ready by April, anothercomputer will apparently develop the civil signal navigation data. However, neither the data or message is intended for actual use, nor will the FAA or any transport agency employ it. The advance project is designed to aid reciever manufaturers and developers in adpting to the new signal.
In addition to questioning Air Force 2 SOPS ability to broadcast an accurate, compliant signal containing CNAV, the letter appears to ignore — or be ignorant of — the 17 official U.S. government/military monitoring sites for GPS distributed around the world, not to mention thousands of other monitoring sites run by government agencies such as the Jet Propulsion Laboratory, the National Aeronautics and Space Administration, and the National Geospatial-Intelligence Agency, and by many universities such as Stanford, Ohio State, Cal Tech, and many other international institutions around the world. Many of these sites collaborate under the rubric of the International GNSS Service.
Finally, John Deere and Trimble Navigation both operate automated GPS signal monitoring systems that that report any anomaly in the navigation message for all GPS signals with an average two-second notification time.
“This letter is so much BS,” fumed one source who wished to remain anonymous, “coming from an agency that is in arrears in its GPS payments to the tune of more than $70 million and has no clue how to represent the global GPS user. GPS is a ubiquitous system, not just a tool for the DOT and the Federal Aviation Administration. GPS needs to implement these signals for all users and as a modernization program that was promised to be in place years ago.”
Porcari left for the private sector.
OCX Change Order to Ensure Proper M-Code Function
Raytheon Intelligence and Information Systems has been awarded a change order for work that costs up to $8.5 million on its existing contract to ensure that the new military signal, M-code, works with the GPS Operational Control System, according to an announcement from the Pentagon as reported by Space News.
Raytheon is building the ground station (OCX) for a new generation of satellites that will bring more safety and precision to GPS. The contract modification is to assure implementation of M-code capabilities across OCX Block 1 and 2. M-code is the new highly secure, anti-jam signal designed for the GPS III constellation. The current GPS ground control system lacks M-code capability.
The OCX is designed to work with the advanced GPS III positioning, navigation and timing satellites, slated to start launching in 2015, and also will be backwardly compatible with existing GPS satellites.
Raytheon won the $886.4 million prime contract to develop the OCX in February 2010. Work will be performed at Raytheon’s facility in Aurora, Colorado, and is expected to be completed by August 31, 2016.
The Air Force Space and Missile Systems Contracting Directorate, Los Angeles Air Force Base, California, is the contracting agency.
Details. Raytheon Intelligence and Information Systems, Aurora, Colorado, was awarded the unpriced change order (P00112) with a not-to-exceed of $8,595,748 on an existing contract (FA8807-10-C-0001) for M-Code Implementation on the Operational Control System. The contract modification is to assure implementation of M-Code Capabilities across OCX Block 1 and 2. Work will be performed at Aurora and is expected to be completed by August 31, 2016. Fiscal 2014 research and development funds will be obligated at definitization.
GAGAN Certified for Aviation over India
The Director General of Civil Aviation of India has certified the GPS-Aided Geo Augmented Navigation (GAGAN) system to Required Navigation Performance 0.1 Nautical Mile (RNP0.1) service level.
Aircraft equipped with satellite-based augmentation system (SBAS) receivers can now use GAGAN signals in Indian airspace for en route navigation and non-precision approaches without vertical guidance.
Mission control centers and uplink stations now operate on Indian soil. Messages carrying corrections to GPS signals are sent to satellites in geostationary orbit carrying the GAGAN payload.
The availability of the GAGAN signal over Indian airspace bridges the gap between European Union’s European Geostationary Navigation Overlay Service (EGNOS) and Japan’s Multi-functional Satellite Augmentation System (MSAS) coverage areas.
The SBAS consists of 15 Indian reference stations, three uplink stations, three mission control centers, and three GAGAN payloads broadcasting in C and L bands and with all the associated software and communication links.
GAGAN will provide augmentation service for GPS over India, the Bay of Bengal, South East Asia and the Middle East expanding up to Africa.
Car, Nav Makers Emulate NSA: Track, Store Consumer Data
U.S. Big Three automakers and some Japanese car companies track and store data from customers’ on-board navigation systems, according to a report from the U.S. Government Accountability Office. The document describes, in general fashion, practices at General Motors, Ford, Chrysler, Toyota, Honda, and Nissan, and further delves into data storage by GPS manufacturers Garmin and TomTom and nav app designers Google Maps and Telenav.
The GAO said the automakers collect data at times to assist customers with traffic updates, emergency roadside assistance, and to track stolen vehicles.None of the companies currently sell the data, according to the report, but most drivers do not know what information is being tracked and cannot opt out of the data collection programs.
The companies can “track where consumers are, which can in turn be used to steal their identity, stalk them or monitor them without their knowledge. In addition, location data can be used to infer other sensitive information about individuals such as their religious affiliation or political activities.”
The report claims the companies’ privacy policies are sometimes unclear, making it difficult for consumers to understand the potential risks of using their GPS navigation devices.
No federal law regulates GPS privacy; it is not illegal for private companies to collect, use, or sell personal information. Several proposals have been floated in Congress to protect the privacy of GPS data, but none enacted.
China’s BeiDou system claimed a user range error (URE) of 2.5 meters zero age of data (ZAOD) 95% recently. The parallel GPS specifications commit to 6 meters 95% ZAOD and 7.8 meters 95% all AODs. Does this mean that BeiDou is more accurate than GPS? Not so fast.
In late December, director Ran Chengqi of China’s Satellite Navigation System Management Office announced the BeiDou Navigation Satellite System (BDS) Public (or Open) Service Performance Standard. The document details the public service performance parameters of the BeiDou system, including service area, accuracy, integrity, continuity, and availability. It is a basic commitment to customers from BDS providers, but also an important basis for customers to choose, use, and evaluate the system performance.
A few important qualifications of BeiDou’s performance standard first:
According to the foreword of the document, “This document specifies the BDS open service performance standard at the current stage.” This is as it should be.
A paragraph on service volume, however, highlights the fact that BeiDou is as yet a regional service.
“4.4 BDS OS Service Volume
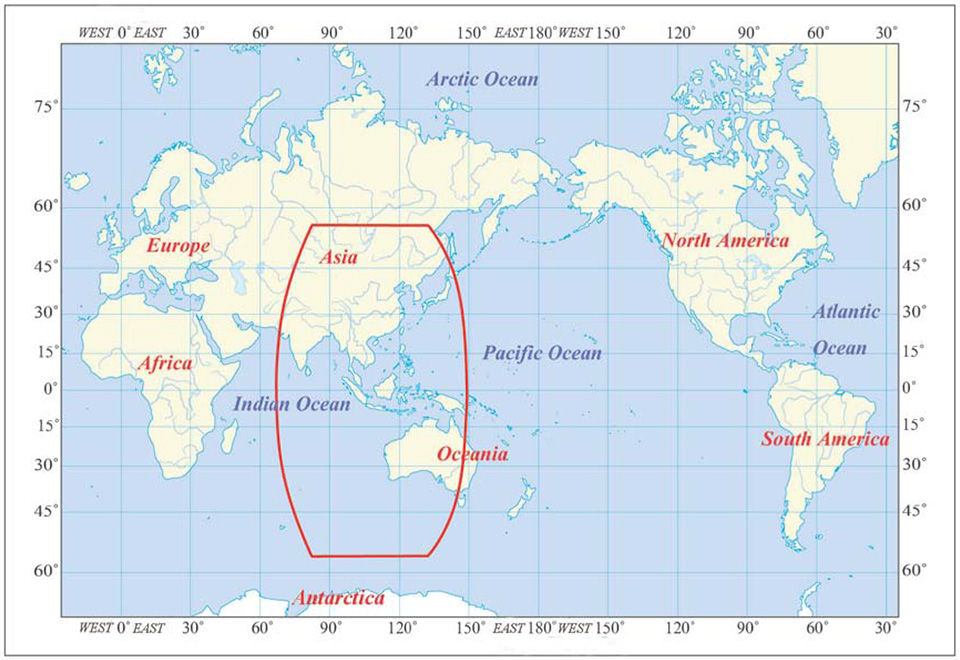
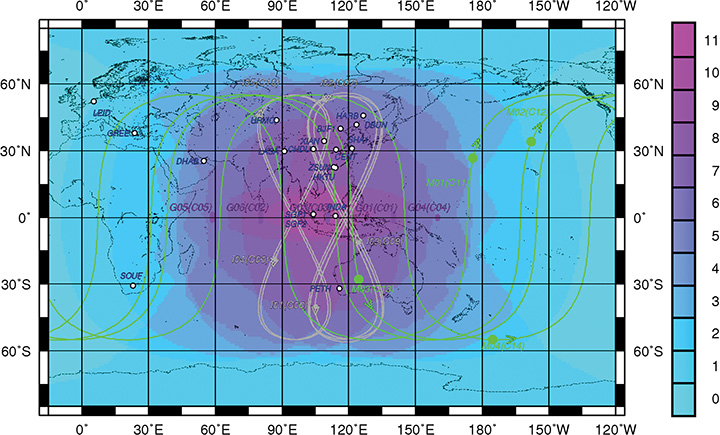
The BDS OS service volume is defined as the OS SIS coverage of the BDS satellites where both the BDS OS horizontal and vertical position accuracy are better than 10 meters (probability of 95%). At the current stage, the BDS regional service capability has been achieved, which can provide continuous OS to the area as shown in Figure 2 & Figure 3, including the most part of the region from 55°S to 55°N, 70°E to150°E.”
The BDS Service Area.
This means that BeiDou commits to 2.5 meter accuracy in China, as well as neighboring countries — and importantly, trading partners — in Southeast Asia plus Australia.
Does this mean that once BeiDou attains global status, it will provide 2.5 meter accuracy everywhere, on its basic single frequency, open service? Hard to tell. Much of its strength, its core strength, one might say, comes from 5 geostationary Earth orbit (GEO) satellites and 5 Inclined Geosynchronous Satellite Orbit (IGSO) satellites. The GEOs hover over the Equator more or less permanently, south of but in the general longitude of China’s sovereign national territory. The IGSOs move back and forth from the northern to the southern hemispheres in the same area.
When BeiDou achieves its planned global reach, an event scheduled for 2020, the constellation will consist of 35 satellites: 5 GEOs, stationed at longitudes so their footprints cover China, 27 medium Earth orbit (MEO) satellites encircling the globe in continuous paths as do those of GPS, and 3 IGSOs over the East and Southeast Asian regions.
Will globally available accuracy at that point match what is achievable in China? It takes a better geometric mind than mine to fathom this.
Even disregarding the geographic limit of the 2.5-meter claim, and ignoring for the moment the mathematical conundrum outlined above, there are reasons to scrutinize the BeiDou Performance Standard more closely, as John Lavrakas of Advanced Research Corporation has done. His notes, and an illuminating table, follow below after a bit more introduction and background on the general topic.
The publishing of the Public Service Performance Standard, a common practice among GNSS operators, is also a prerequisite for BeiDou system involvement in international civil aviation, international maritime, 3rd Generation Mobile [phone] System, and other international standard-setting organization activities.
The document has Chinese and English versions. Because document download from the BDS government website can be difficult, Richard Langley has made them available at the University of New Brunswick website:
John Lavrakas of Advanced Research Corporation posted the following comment to the an earlier online article announcing the Performance Standard document.
“I took a quick look at comparing the BeiDou Open Service Performance Standard with the GPS Standard Positioning Service Performance Standard and obtained mixed results.”
Table 1. Coded to show green for the GNSS service committing to a more stringent standard over the other. Courtesy of Advanced Research Corporation.
“In some cases, the commitments from BeiDou were stronger (URE accuracy, vertical position), and in other cases the commitments from GPS were stronger (continuity of service, advance notice of outages).
“The good news is that GNSS systems are documenting the service levels that users can expect. What we will need next is monitoring to verify these service levels are being met.
A final note. As the GPS stewards from the U.S. Air Force carefully and proudly remind us at each GNSS conference where they deliver a briefing, actual GPS performance has almost always bettered its specs over the last decade or two — often by a considerable margin.
And with that, I think we may all return to our various pursuits, secure in the knowledge that while the gold standard may — repeat, may — at times pass in limited special circumstances or under particular conditions, from system to system, overall GNSS Things Are Getting Better All the Time.
On December 27, 2013, the first anniversary of BeiDou Navigation Satellite System providing full operational regional service was held in Beijing. At the meeting, China Satellite Navigation System Management Office Director Ran Chengqi announced the BeiDou Navigation Satellite System Public Service Performance Standard.
The document details the public service performance parameters of BeiDou system, including service area, accuracy, integrity, continuity, and availability. It is a basic commitment to customers from BeiDou system providers, but also an important basis for customers to choose, use and evaluate the system performance.
Also released is Version 2 of the BeiDou Navigation Satellite System Interface Control Document (ICD) for the Open Service Signal. Among other changes, the new version now includes a description of the B2I signal on 1207.140 MHz.
The publishing of the Public Service Performance Standard is a common practice in the world satellite navigation system suppliers, and also a prerequisite for BeiDou system involvement in international civil aviation, international maritime, 3GPP and other international standard-setting organization activities. Further, it is meaningful for the promotion of international cooperation and application of the BeiDou system in the aviation, maritime and mobile communication areas, according to the China Satellite Navigation System Management Office.
The implementation changes and first live tests of BeiDou and Galileo on Teseo-3 GNSS chips developed in 2013 are covered, bringing it to a four-constellation machine. By 2020, we expect to have four global constellations all on the same band, giving us more than 100 satellites — under clear sky, as many as 30 or 40 simultaneously.
By Philip G. Mattos and Fabio Pisoni
Multi-constellation GNSS first became widely available in 2010/2011, but only as two constellations, GPS+GLONASS. Although receivers at that time may have supported Galileo, there were no usable satellites. BeiDou was a name only, as without a spec (an interface control document, or ICD), no receivers could be built. However, the hardware development time of receivers had been effectively shortened: the Galileo ICD had been available for years, BeiDou codes had been reverse-engineered by Grace Gao and colleagues at Stanford, and at the end of 2011 they were confirmed by the so-called test ICD, which allowed signal testing without yet releasing message characteristics or content.
The last weeks of 2012 saw two great leaps forward for GNSS. Galileo IOV3 and 4 started transmitting at the beginning of December, bringing the constellation to four and making positioning possible for about two hours a day. At the end of December, the Chinese issued the BeiDou ICD, allowing the final steps of message decode and ephemeris calculation to be added to systems that had been tracking BeiDou for many months, and thus supporting positioning. The Teseo-2 receiver from STMicroelectronics has been available for some years, so apart from software development, it was just waiting for Galileo satellites; however, for BeiDou it needed hardware support in the form of an additional RF front end. Additionally, while it could support all four constellations, it could not support BeiDou and GPS/Galileo at the same time, as without the BeiDou ICD the spreading codes had to be software-generated and used from a memory-based code generator, thus blocking the GPS/Galileo part of the machine.
The Teseo-3 receiver appeared late in 2013, returning to the optimum single-chip form factor: RF integrated with digital silicon and flash memory in the same package, enabling simultaneous use of BeiDou and GPS/Galileo signals. Multi-constellation in 2012 was GPS+GLONASS, which brought huge benefits in urban canyons with up to 20 visible satellites in an open sky. Now, for two hours a day in Europe while the Galileo IOVs are visible, we can run three constellations, and in the China region, GPS/BeiDou/Galileo is the preferred choice.
This article covers the first tracking of four Galileo satellites on December 4, 2012, first positioning with Galileo, and first positioning with BeiDou in January 2013. It will cover static and road tests of each constellation individually and together as a single positioning solution. Road tests in the United States/Europe will combine GPS/GLONASS/Galileo, while tests in the China region will combine GPS/Galileo/BeiDou. Results will be discussed from a technical point of view, while the market future of multi-constellation hardware will also be considered.
In the 2010–2020 timeframe, GLONASS and BeiDou (1602 MHz FDMA and 1561 MHz respectively) cost extra silicon in both RF and digital hardware, and cause marginal extra jamming vulnerability due to the 50 MHz bandwidth of the front end. The extra silicon also causes extra power consumption.
After 2020, GLONASS is expected to have the L1OC signal operational, CDMA on the GPS/Galileo frequency, and BeiDou is expected both to have expanded worldwide, and also to have the B3 signal fully operational, again on 1575 MHz. At that point we will have four global constellations all on the same band, giving us more than 100 satellites. With a clear sky, the user might expect to see more than 30, sometimes 40, satellites simultaneously.
Besides the performance benefits in terms of urban canyon availability and accuracy, this allows the receiver to be greatly simplified. While code generators will require great flexibility to generate any of the code families at will, the actual signal path will be greatly simplified: just one path in both RF (analog) and baseband (digital) processing, including all the notch filters, derotation, and so on. And this will greatly reduce the power consumption.
Will the market want to take the benefit in power consumption and silicon area, or will it prefer to reuse those resources by becoming dual-frequency, adding also the lower-L-band signals, initially L5/E5, but possibly also L2/L3/L6 ? The current view is that the consumer receiver will go no further than L5/E5, but that the hooks will be built-in to allow the same silicon to be used in professional receivers also, or in L2C implementations to take advantage of the earlier availability of a full constellation of GPS-L2C rather than GPS-L5.
This article presents both technical results of field trials of the quad-constellation receiver, and also the forward looking view of how receivers will grow through multi-frequency and shrink through the growing signal commonalities over this decade.
History
Galileo was put into the ST GPS/GNSS receiver hardware from 2006 to 2008, with a new RF and an FPGA-based baseband under the EU-funded GR-PosTer project. While a production baseband (Cartesio-plus) followed in high volume from 2009, in real life it was still plain GPS due to the absence of Galileo satellites.
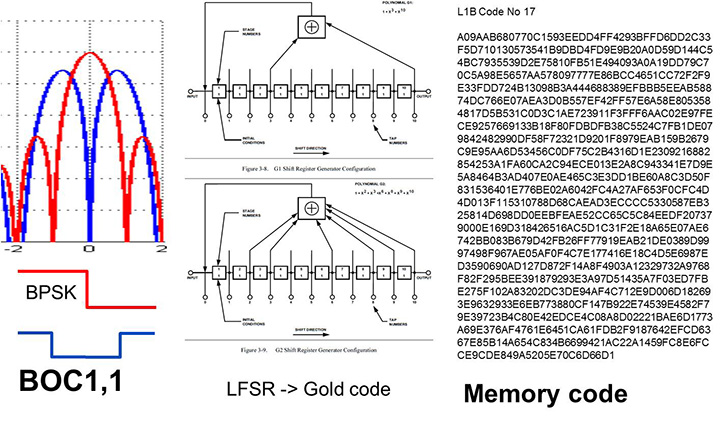
The changed characteristics in Galileo that drove hardware upgrades are shown in Figure 1. The binary offset carrier BOC(1,1) modulation stretches the bandwidth, affecting the RF, while both the BOC and the memory codes affect the baseband silicon in the code-generator area.
Figure 1. Changes for Galileo.
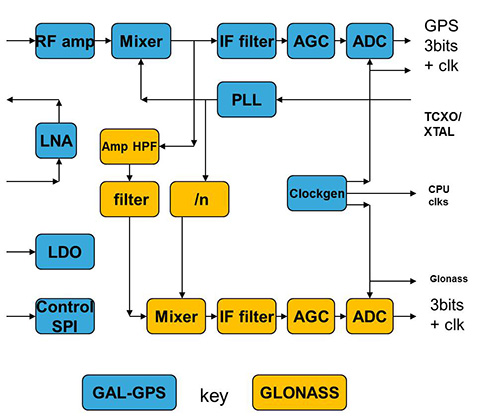
Next was the return to strength of the GLONASS constellation, meaning receivers were actually needed before Galileo. However the different center frequency (1602 MHz), and the multi-channel nature of the FDMA meant more major changes to the hardware. As shown in Figure 2 in orange, a second mixer was added, with second IF path and A/D converter.
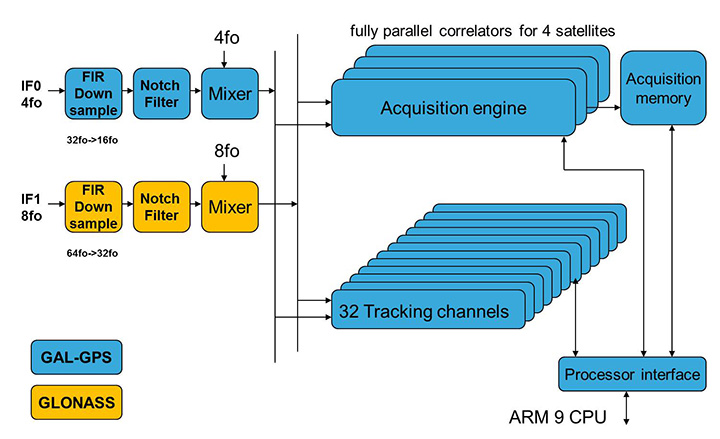
Figure 2. Teseo-2 RF hardware changes for GLONASS.Figure 3. Teseo-2 and Teseo-3 baseband changes for GLONASS.
The baseband changes added a second pre-processing chain and configured all the acquisition channels and tracking channels to flexibly select either input chain. Less visible, the code-generators were modified to support 511 chip codes and 511kchips/sec rates.
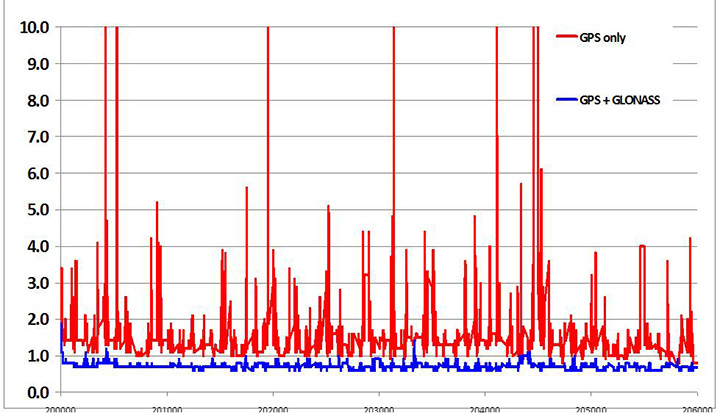
Teseo-2 appeared with GPS/GLONASS support in 2010, and demonstrated the benefit of GNSS in urban canyons, as shown by the dilution of precision (DOP) plot for central London in Figure 4. The GPS-only receiver (in red) has frequent DOP excursions beyond limits, resulting either in bad accuracy or even interrupted fix availability. In contrast, the GNSS version (in blue) has a DOP generally below 1, with a single maximum of 1.4, and thus 100 percent availability. Tracking 16 satellites, even if many are via non-line-of-sight (NLOS) reflected paths, allows sophisticated elimination of distorted measurements but still continuous, and hence accurate, positioning.
Figure 4. DOP/accuracy benefits of GNSS.
BeiDou
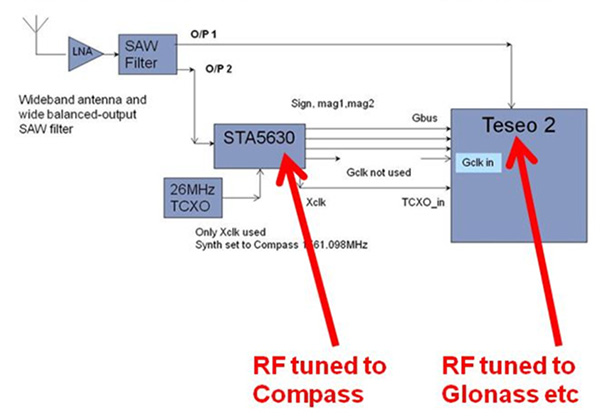
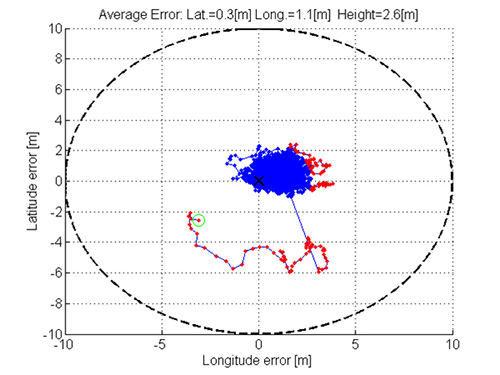
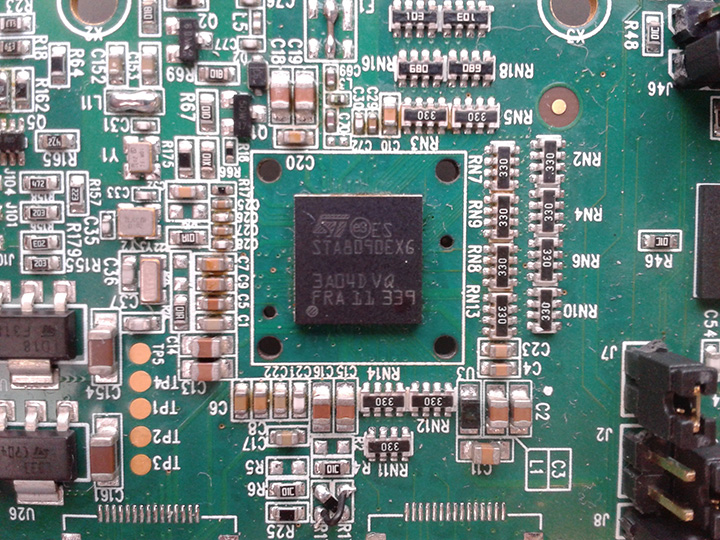
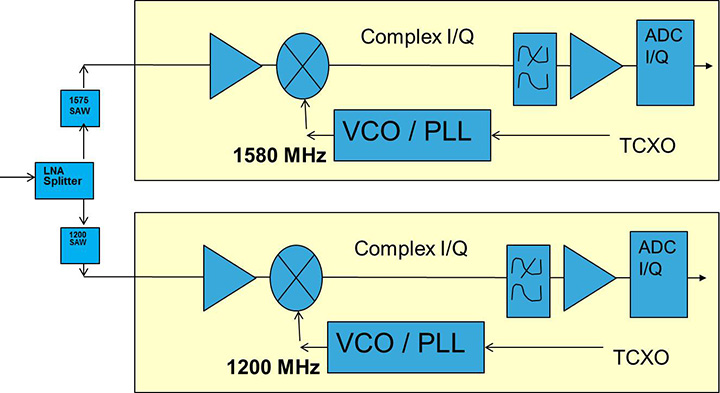
Like Galileo, BeiDou is a story of chapters. Chapter 1 was no ICD, and running on a demo dual-RF architecture as per the schematic shown in Figure 5. Chapter 2 was the same hardware with the test ICD, so all satellites, but still no positioning. Chapter 3 was the full ICD giving positioning in January 2013 (Figure 6), then running on the real Teseo-3 silicon in September 2013, shown in Figure 7.
Figure 5. Demo Teseo-2 dual RF implementation of BeiDou.Figure 6. Beidou positioning results.Figure 7. Teseo 3 development board.
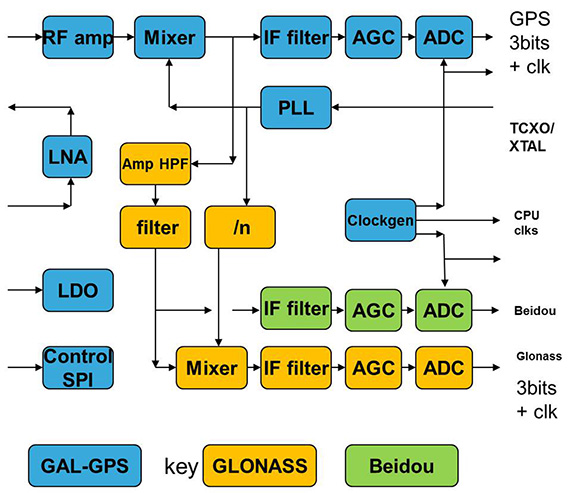
The Teseo-3 has an on-chip RF section capable of GPS, Galileo, GLONASS and BeiDou, so no external RF is needed.
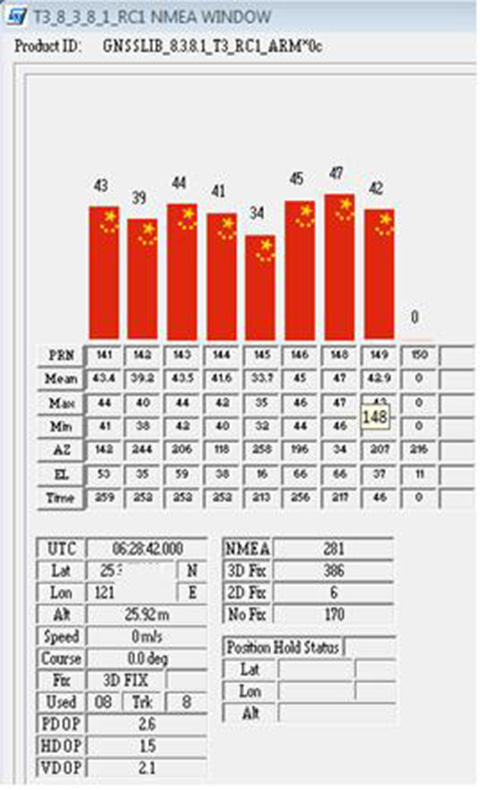
The clear green space around the Teseo-3 chip in the photo and the four mounting holes are for the bolt-down socket used to hold chips during testing, while the chip shown is soldered directly to the board. Figure 8A shows the development board tracking eight BeiDou satellites visible from Taiwan.
However, the silicon is not designed to be single-constellation; it is designed to use all the satellites in the sky. Figure 8b shows another test using GPS and BeiDou satellites simultaneously.
Figure 8A. Beidou.Figure 8b. GPS+Beidou.
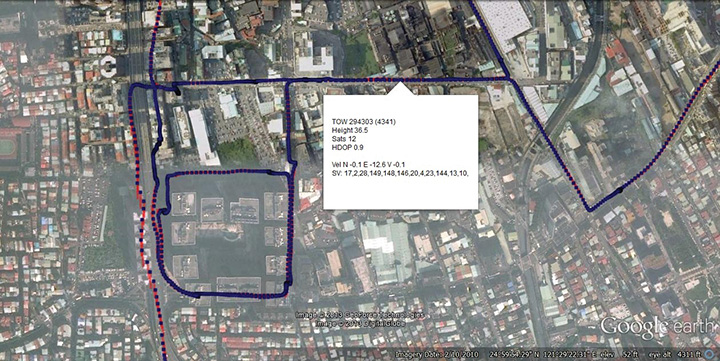
A mobile demo on the Teseo-3 model is shown running GPS plus BeiDou in Figure 9, a road test in Taipei. Satellites (SV) up to 32 are GPS, those over 140 are BeiDou, in the status window shown: total 13 satellites in a high-rise city area, though many are non-LOS.
Figure 9. GPS + Beidou roadtrack in Taipei.
Extending the hardware to add BeiDou, which is on 1561 MHz and thus a third center frequency, meant adding another path through the IF stages of the on-chip radio. After the first mixer, GPS is at 4 MHz, and GLONASS at about 30 MHz, but BeiDou is at minus 10 MHz. While the IF strip in general is real, rather than complex (IQ), the output of the mixer and input to the first filter stage is complex, and thus can discriminate between positive frequencies (from the upper sideband) and negative ones (from the lower sideband), and this is normally used to give good image rejection. In the case of BeiDou, the filter input is modified to take the lower sideband, that is, negative frequencies, and a second mixer is not required; the IF filter is tuned to 10 MHz. The new blocks for BeiDou are shown in green in Figure 10. The baseband has no new blocks, but the code generator has been modified to generate the BeiDou codes (and, in fact, made flexible to generate many other code types and lengths). Two forms of Teseo-3 baseband are envisaged, the first being for low-cost, low-current continues to have two input paths, so must choose between GLONASS and BeiDou as required. A future high-end model may have an extra input processing path to allow use of BeiDou and GLONASS simultaneously.
Figure 10. Teseo-3 RF changes for Beidou shown in green.
Galileo Again
Maintaining the chronological sequence, Galileo gets a second chapter in three steps. In December 2012, it was possible for the first time to track four IOV satellites simultaneously, though not to position due to the absence of valid orbit data. In March 2012, it was possible for the first time to demonstrate live positioning, and this was done using Teseo-2 simultaneously by ESA at ESTEC and STMicro in Naples and Milan, our software development centres.
The demos were repeated in public for the press on July 24, 2013, at Fucino, Italy’s satellite earth station, with ESA/EC using the test user receiver (TUR) from Septentrio, and ST running simultaneous tests at its Italian labs. Figure 11 and Figure 12 show the position results for the data and pilot channels respectively, with independent LMS fixes. In real life, the fixes would be from a Kalman filter, and would be from a combined E1-B/E1-C channel, to take advantage of the better tracking on the pilot.
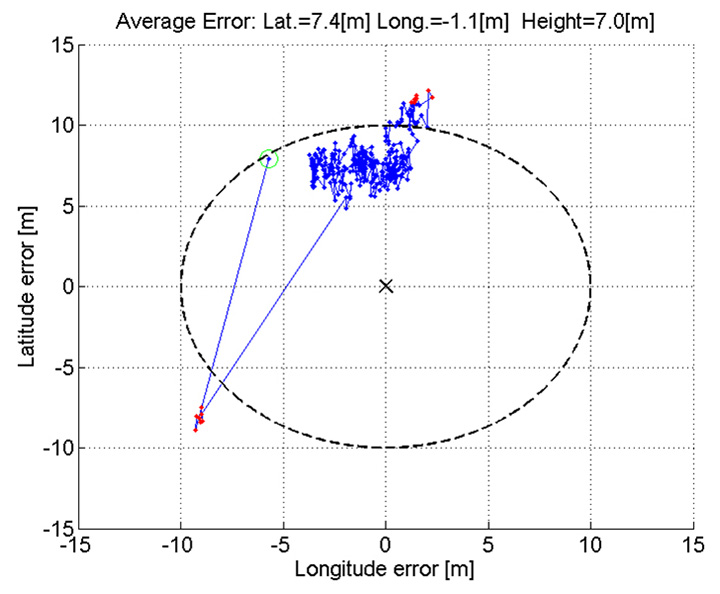
Good accuracy is not expected from Galileo at this stage. The four satellites, while orbited to give good common visibility, do not also give a good DOP; the full set of ground monitoring stations is not yet implemented and cannot be well calibrated with such a small constellation. Finally, the ionospheric correction data is not yet available. Despite these problems, the residuals on the solutions, against a known fixed position for the rooftop antenna, are very respectable, shown in Figure 13.
Figure 13. Galileo residuals, L1-B.
The common mode value is unimportant, representing only an offset in the receiver clock, and 10 meters is about 30 nanoseconds. The accuracy indicator is the spread between satellites, which is very respectable for a code-only receiver without full iono correction, especially around 640 on the TOW scale, where it is less than 2 meters. The rapid and major variation on the green data around t=400 is considered to be multipath, as the roof antenna is not ideally positioned with respect to other machinery and equipment also installed on the roof.
QZSS and GPS-III/L1C
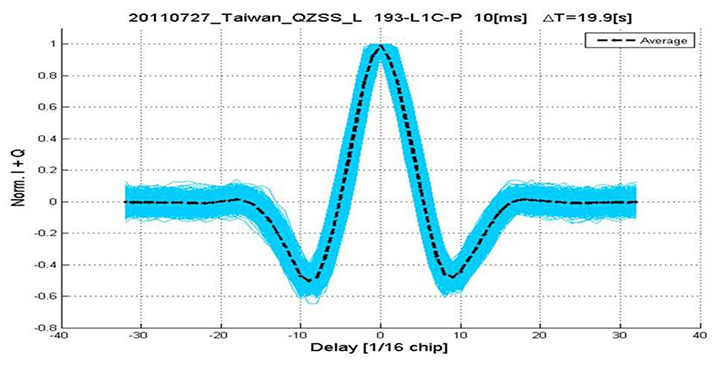
Teseo-2 has supported the legacy (C/A code) signal on QZSS for some time, but Teseo-3 has been upgraded to handle the GPS-III/L1-C signal, waiting for modernized GPS. This signal is already available on the QZSS satellite, allowing tests with real signals. Significant changes were required in the baseband hardware, as the spreading code is a Weill code, whose generation complexity is such that it is generated once when the satellite is selected, then replayed real time from memory. Additionally it is long, in two domains. It is 10230 chips — that is, long to store but also long in time, with a 10-millisecond epoch. On Teseo-3, the legacy C/A code is used to determine code-phase and frequency before handing over to the Weill code for tracking.
Using a long-range crystal ball and looking far into the future, a model of the future Teseo-4 DSP hardware is available, with 64 correlation taps per satellite. Running this on the captured QZSS L1-C signal gives the correlation response shown in Figure 14. Having multiple taps removes all ambiguity from the BOC signal, simultaneously removing data transitions, which can alternatively be pre-stripped using the known pilot secondary code (which on GPS III is 5 dB stronger than the data signal). The resultant plot represents 2,000 epochs, each of 10 milliseconds, plotted in blue, with integrated result for the full 20 seconds shown in the black dashed line. Assuming vehicle dynamics is taken out using carrier Doppler, this allows extremely precise measurement of the code phase, or analysis of any multipath in order to remove it. This RF data was captured on a benign site with a static antenna, so it shows little distortion.
Figure 14. L1-C tracking on QZSS satellite.Figure 15. Dual RF implementation of dual-band front end.
The Future
Having already built in extreme flexibility to the code generators to support all known signals and generalized likely future ones, the main step for the future is to support multiple frequencies, starting with adding L5 and/or L2, but as before, ensuring that enough flexibility is built in to allow any rational user/customer choice. It is not viable for us to make silicon for low-volume combinations, nor to divide the overall market over different chips. Thus our mainstream chip must also support the lower volume options.
We cannot, however, impose silicon area or power consumption penalties on the high-volume customer, or he will not buy our product.
Thus, our solution to multi-frequency is to make an RF that can support either band switchably, with the high band integrated on the volume single-chip GNSS. Customers who also need the low band can then add a second RF of identical design externally, connected to the expansion port on the baseband, which has always existed for diagnostic purposes, and was how BeiDou was demonstrated on T2. By being an RF of identical design to the internal one, it incurs no extra design effort, and would probably be produced anyway as a test chip during the development of the integrated single-chip version. Without this approach, the low volume of sales of a dual-band radio, or a low-band radio, would never repay its development costs.
Conclusions
All four constellations have been demonstrated with live satellite signals on Teseo-2, a high-volume production chip for several years, and on Teseo-3 including use in combinations as a single multi-constellation positioning solution. With the advent of Teseo-3, with optimized BeiDou processing and hardware support for GPS-3/L1C, a long-term single-chip solution is offered.
For the future, dual-frequency solutions are in the pipeline, allowing full advantage of carrier phase, and research into moving precise point positioning and real-time kinematic into the automotive market for fields such as advanced driver-assistance systems.
Acknowledgments
Teseo III design and development is supported by the European Commission HIMALAYA FP-7 project.
This article is based on a technical paper first presented at ION-GNSS+ 2013 in Nashville, Tennessee.
ST GPS products, chipsets and software, baseband and RF are developed by a distributed team in: Bristol, UK (system R&D, software R&D; Milan, Italy (Silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); Noida, India (verification and FPGA). The contribution of all these teams is gratefully acknowledged.
Philip G. Mattos received an external Ph.D. on his GPS work from Bristol University. Since 1989 he has worked exclusively on GNSS implementations, RF, baseband and applications. He is consulting on the next-generation GNSS chips, including one-chip GPS (RF+digital), and high-sensitivity GPS and Galileo for indoor applications, and combined GPS/Galileo/GLONASS chipsets. In 2008-2009, he re-implemented LORAN on the GPS CPU, and in 2009-2010 led the GLONASS implementation team. He is leading the team on L1C and BeiDou implementation, and the creation of totally generic hardware that can handle even future unknown systems.
Fabio Pisoni has been with the GNSS System Team at STMicroelectronics since 2009. He received a master’s degree in electronics from Politecnico di Milano, Italy, in 1994. He was previously with the GNSS DSP and System Team in Nemerix SA and has earlier working experience in communications (multi-carrier receivers).
Hello, everyone, I am looking for a tool/software which can generate a satellite geometry distribution map of Chinese BeiDou over Asia. Just like a GPS PDOP global map. Could anyone give me a help? Thanks a lot in advance.
We use this tool to plot satellite coverage: www.agi.com/
We have a standard mission planning tool that can do it (GPS, GLONASS, Galileo and BeiDou) and is included with our post-processing software, called EZSurv. If you’re interested to try the planner, I can send an evaluation copy of it.
You can use the (free!) Trimble online Planner (www.trimble.com/GNSSPlanningOnline/#/SatLibrary). Supports GPS, GLONASS, Galileo, BeiDou, QZSS. There was an offline tool available, too, but can’t find it anymore. Really helpful tools, thanks Trimble!
We at GMV have our own Service Volume Simulator, named polaris (www.gmv.com/en/space/Polaris/). polaris has been (and is being) extensively used in the Galileo and EGNOS programmes.
From the CANSPACE Discussion Group (ListServ)
I’d like to view broadcast SV health data that is accurate to the minute. When I use IGS stations, I can only find health data in nav files to the resolution of two hours. Could someone point me to where I could find SV health data with the granularity of 1 minute or better?
Comments
Some IGS stations stream data, including ephemerides, in real time. Presumably, any change in SV health would be reflected in an updated ephemeris. Real-time ephemeris data from the global network is provided on available Ntrip streams. Georg Weber (the scientific director in the Department of Geodesy at the German Federal Agency for Cartography and Geodesy (BKG) and a member of the IGS Real-time Working Group and the Radio Technical Commission for Maritime (RTCM) Services Special Committee (SC) 104 on Differential Global Navigation Satellite Systems (DGNSS)) kindly supplied this information:
“If I understand things correctly, then an updated navigation message is disseminated immediately when GPS operators become aware of a problem and that this is the only real-time source of information regarding SV health coming directly from the system. Hence real-time access to RTCM broadcast ephemeris messages is what you are asking for. Here is how to get it:
Pull stream RTCM3EPH for a few seconds and convert its contents to RINEX2 or RINEX3 navigation files.
Stream RTCM3EPH contains only broadcast ephemeris for GPS and GLONASS as received from the global real-time IGS network — no observations. The broadcast ephemeris repetition/update rate is 5 seconds.”
The Navigation message is only updated every two hours (currently) so the granularity you require is not possible, as the health flag is an official designation from the GPS control center. The fastest changing navigation files are in the IGS Data centers called “hourDDD0.13n” for example, for today here: ftp://cddis.nasa.gov/gps/data/hourly/2013/318/hour3180.13n.Z
This file gets updated hourly (or more) with the contributions from the navigation files of the IGS network.
A faster way of noting changes would be to monitor several worldwide data real-time streams from public stations using the BNC software to monitor the health flags, but while the data will come in real-time the changes in flag status only take place every two hours, but at least you will see a health flag change very quickly. Check out:
November 29, 2013, marks the 210th anniversary of the birth of Christian Doppler. His work laid down the fundamental concepts that enabled researchers at Johns Hopkins University in the United States to make observations on the signals of Sputnik I during the International Geophysical Year of 1957. From those observations more than 60 years ago, we can trace the development of GNSS as we know it today. The very genesis of GNSS drew on the combined science, technology, and innovation from Europe, the United States, and Russia. Today, GNSS is a truly global technology that has changed for the better the lives of an estimated one billion people.
2013 also saw a major milestone in the global history of GNSS with the announcement by the European Space Agency (ESA) that the Galileo system had generated its first position fix using operational space vehicles. Here at Trimble we have for some time been providing user equipment that is ready for the modernized, multiple-constellation environment emerging in the coming years. It is still exciting to see the plans of the GNSS operators gradually become a reality, whether it is the ongoing deployment of Galileo and BeiDou or the modernization of GPS and GLONASS. There is no doubt that GNSS users worldwide will benefit significantly from these new developments, and it is natural to expect that we will see continued user-driven adoption and integration of these systems in the year ahead, together with new applications and services that make full use of the expanding GNSS capabilities.
Global Addiction to Accuracy
We have come to expect — if not demand — that technologies continuously evolve to become faster, smaller, and more cost-effective, while also providing expanded functionality and benefits. For GNSS, this expectation includes increased accuracy and precision for a growing proportion of the total user base, together with a desire to determine location in more places or, ultimately, ubiquitously.
From a technological perspective, the trend to increased accuracy is moving beyond local or regional land- or satellite-based differential augmentation toward global networks and services. New technologies such as Trimble RTX use data from a global network of GNSS stations together with global connectivity and communications to facilitate precise point positioning without the need to connect to local or regional reference station networks. Such capabilities simplify the user’s experience with precise positioning, while at the same time vastly expanding the areas on Earth where such positioning can be quickly and conveniently carried out.
Over the past decades, high-precision GNSS positioning has been adopted by increasingly larger numbers of users in the context of end-to-end work-process solutions in industries from agriculture to construction, surveying and mapping, energy, mining, utilities, transportation, and government, to name but a few. With assets, workers, and work sites spread over large geographic areas, these industries and operations have transformed how their work is done through the use of systems that incorporate real-time location information. While we should expect adoption and advancement in these areas to continue due to the compelling economic, safety, and environmental benefits provided, we should also expect to see increasing adoption of high-precision GNSS positioning in new applications such as intelligent transportation and within some proportion of the consumer user base. Accuracy is, after all, addictive.
Availability, Too. Along with accuracy, availability of position is also proving to be addictive; once we come to depend on location-enabled systems in our professional and personal lives, our needs and expectations will naturally tend toward that of continuous availability at all times and regardless of location. Although new constellations with more satellites and new, stronger signals help in this regard, augmentation of GNSS plays a key role on the path to more robust ubiquity. From a Trimble perspective, many of our new product launches during the past year incorporated deep integration of multiple measurement technologies. New systems combine GNSS with inertial measurement units, gyros, tilt sensors, seismometers, optical measurement, imaging systems, lasers, and other sensors or technologies, all enabling location and movement determination (increasingly in three dimensions) of more objects in more places — including, in some cases, even inside buildings. Looking to the future,we can expect the appetite for ubiquitous positioning to continue unabated.
Multiple sensors are also used to collect non-geographic information. Increasingly, innovation is taking place at the intersection and aggregation of many different types of data, providing new insights and enabling more informed, more timely, and more insightful decisions across almost every facet of human activity. GNSS is rapidly expanding its role as an enabling technology in this regard. While we know that delivering consistently accurate positions is a decidedly nontrivial achievement, those positions are often just one component of increasingly large and complex endeavors. In fact, much of the innovation today lies in applications that enable new, more efficient approaches to work and enterprise management, and in the creation of new and powerful analytics from aggregated data.
Global Utility, Global Business
2013 marks another important anniversary: GPS officially reached Initial Operating Capability twenty years ago on December 8, 1993. In his 2011 State of the Union address, U.S. President Barack Obama cited GPS, along with the Internet, as key examples of how government-funded fundamental research can stimulate innovation and create whole new industries. The combination of those two technologies has transformed our lives in ways even the early visionaries may not have imagined. The U.S. government has contributed to the global success of GPS in ways beyond technological innovation. Following the 1983 Korean Airlines 007 disaster (caused in part by inaccurate navigation), President Reagan declared that GPS should be free and available to all, providing a stable policy foundation upon which successive U.S. administrations have continued to build, increasingly recognizing the importance of civilian GPS applications.
Importantly, the United States strengthened this open-access policy framework by publishing the Interface Control Document for GPS, which enabled entrepreneurs and innovators anywhere in the world to bring to life their ideas about how this new technology in space could be used on Earth. For the most part, other governments have followed U.S. leadership in announcing predictable policy access to worldwide satellite positioning and timing availability, allowing innovation to take place wherever it may. In the process it spawned a truly global industry.
Technology alone has not achieved the global impact of GNSS. Rather, it is the combination of technology, a transparent, stable policy environment conducive to global innovation and adoption, and the economics of a global market that together have led to so many people today enjoying the benefits that GNSS provides. Such alignment is equally important for the future: just as GNSS from the beginning built upon knowledge and achievement from around the world, its full international potential will be best realized through global, user-driven innovation, vibrant international entrepreneurship, and robust open markets. Given that we are still far from reaching that full potential, there is good reason for us all to have great expectations of GNSS operators, the industry, and the user community in 2014 and beyond.
Peter O. Large joined Trimble in 1996 and has served as a vice president and a member of the executive committee since 2010. He holds a BSc (Hons) in surveying and mapping science from the University of Newcastle upon Tyne, UK, and an M.S. in management from Stanford University.
By Chengqi Ran, Director General of the China Satellite Navigation Office
By adhering to the principles of independence, openness, compatibility, and gradualness, China has steadily pushed forward the deployment of the BeiDou Navigation Satellite System (BDS), following a planned three-step strategy. In 2000, BeiDou Navigation Satellite Demonstration System was completed. By December 2012, five geostationary orbit (GEO) satellites, five inclined geosynchronous orbit (IGSO) satellites, and four medium-Earth orbit (MEO) satellites had been launched, forming the constellation, and formally beginning service provision to the Asia-Pacific region.
The important contribution of BDS for Chinese and global users is well-recognized. It will provide services to global users by around 2020.
System Deployment
Moving forward in 2014, additional satellites will be launched to form the next constellation, while regional service performances will be advanced and expanded to worldwide scope. Approximately 40 satellites in total will have been launched by about 2020.
Current System Performance
Single-frequency horizontal, vertical, and three-dimensional positioning accuracy has been achieved at levels better than 10 meters, 10 meters, and 14 meters, respectively. Timing accuracy is better than 50 nanoseconds. Velocity accuracy is better than 0.2 meters per second. Carrier-phase differential accuracy is about 2–3 centimeters. During the past year, BDS has been continuously improved and enhanced, while its service performances in some regions dramatically surpassed the indicators given earlier.
Application Promotion
The application of BDS has played an important role in China, especially in advancing science and technology. Chinese scientists and engineers have intelligently and enthusiastically embraced China’s independent navigation satellite system and have made great progress in research and development of navigation satellite technologies, as well as new breakthroughs in the production of navigation chips, antennas, terminals, and integrated services.
In 2012, the total output value of China’s satellite navigation and location-based service (LBS) industries reached 81 billion renminbi (RMB, equivalent to $13.2 billion), which amounts to 8 percent of the global sector. At the end of 2012, BDS civil user terminals totaled 230,000 units, and BDS-related industrial output value was close to 4 billion RMB ($652 million), which is about 5 percent of the national output.
A series of policies aimed at strengthening the application of satellite navigation are under formulation in China, and the Mid- and Long-Term Development Plan for the National Satellite Navigation Industry has been issued. Satellite navigation has become one of the emerging industries with strategic importance. BDS is propelling China’s satellite navigation and LBS industries into a new era.
Distribution of visible in-orbit BeiDou satellites.
International Cooperation
China upholds and adheres to the concept of “BeiDou is of China, and also of the world,” advocating compatibility and interoperability among navigation satellite systems, and endeavoring to stimulate global widespread use of navigation satellite systems. To enable users to enjoy more reliable and ensured satellite navigation services, BDS has joined in international GNSS monitoring and assessment cooperation, making use of global monitoring stations, sharing international monitoring statistics, implementing joint assessment studies, and striving to offer trustworthy monitoring and assessment data and products to users.
To achieve BDS’ envisioned coverage area more quickly, the BeiDou+ Application Demonstration and Experience Campaign (BADEC) has been initiated. “BeiDou’s tour to the Asian-Pacific region” and “BeiDou’s tour to the ASEAN” have been kicked off to accelerate application promotion of navigation satellite systems in many countries. To popularize satellite navigation technologies, particularly enhancing its recognition and application in developing countries, BDS has provided academic education, short-term training, and thematic lectures with support from International GNSS Exchange and Training Center.
China also holds the annual China Satellite Navigation Conference, actively participates in international exchange activities on satellite navigation, and engages in academic exchanges, high-level forums, and popularization of knowledge.
Future Outlook
BDS is also committed to:
establishing navigation-satellite augmentation systems in the Asia-Pacific region and worldwide, developing better service performances, to provide decimeter-level accuracy in real time and centimeter-level accuracy after post-processing;
setting up satellite-navigation products-quality testing certification centers;
speeding up formulation of standards and intellectual property rights;
joining international organizations such as the International Civil Aviation Organization (ICAO), International Maritime Organization (IMO), and Third-Generation mobile communication standard Partnership Project (3GPP);
strengthening compatibility and interoperability with the other navigation satellite systems;
promoting BDS/GNSS applications in transportation, energy, power, finance, telecommunication, disaster reduction and relief, and so on, to realize the BDS objective of serving the world and benefiting mankind.
BDS will fully exploit the unique advantages of navigation, communication, and augmentation integration, enhance its short message service (SMS), and providing faster positioning and timing capabilities. BDS will also effectively integrate satellite- and ground-based augmentation systems, and insist on implementations of compatibility and interoperability among multi-GNSS, to enable its organic integration with mobile communication, LBS, and the Internet, and provide better quality, more reliable and efficient services to eco-social development, public security, and individual users.
Chengqi Ran is the director general of the China Satellite Navigation Office and press spokesman of BeiDou Navigation Satellite System. He graduated from Tsinghua University with a Master’s degree in industrial engineering, and previously was director of the General Technology Department in the China Satellite Navigation Project Center.