Europe’s 2nd Horizon Europe call has been launched for European GNSS, Galileo and Earth observation projects, offering total funding of €48.1 million.
The Horizon program is managed by the European Union Agency for the Space Programme (EUSPA). It funds research and innovation by small and mid-size enterprises, academia, public actors and others that will stimulate development of space applications and solutions using EUSPA data and services.
The 2nd call aims to to strengthen downstream capabilities and modernize the EU public sector by offering cutting-edge solutions based on Galileo, Copernicus, EGNOS and GOVSATCOM.
Funding is being offered for projects that make use of Galileo and EGNOS in smart mobility applications. Other projects fuse Copernicus data with artificial intelligence to boost the European economy and help modernize the public sector. For the first time, the call seeks to deliver satellite communication use cases based on the forthcoming GOVSATCOM system.
Below is a breakdown of the funds’ distribution per thematic area.
Visit the EU’s funding & tender opportunities portal for detailed information about the EUSPA call and the topics available. The deadline for applications is March 2, 2023.
To paraphrase Galileo Galilei — the great Italian astronomer, philosopher, engineer, mathematician and physicist — positioning, navigation and timing (PNT) does not revolve around GPS. The European GNSS named after the father of modern science (as Albert Einstein called him) is making great strides and currently provides more accurate positioning than the United States’ GPS, Russia’s GLONASS, or China’s BeiDou-3. In fact, there are more Galileo satellites providing an L5 signal than GPS satellites.
I heard much well-earned pride about Galileo’s achievements expressed by European presenters at the Institute of Navigation’s GNSS+ conference in Denver in September; during a visit to the European Commission’s Joint Research Center in Ispra, Italy, on Oct. 7; and at the INTERGEO conference and trade show in Essen, Germany, on Oct. 18-20. (On the way, I stayed several days in Pisa, Italy — where I spent my teen years when my father taught physics at the city’s university — at a friend’s home about 100 feet away from the house where Galileo was born in 1564.)
While two more launches are required to complete the Galileo constellation so that it will have at least one spare satellite per plane, its service availability is already at 98-99% and a new ground segment has been deployed. A second generation of satellites is on its way, with expected initial operational capability in 2028 and full operational capability starting after 2031. Its features will include new signals, improved effective isotropic radiated power (EIRP), inter-satellite links, and a 15-year lifespan.
The Open Service Navigation Message Authentication (OSNMA), a free data authentication function for users of Galileo’s Open Service, has been stably transmitted worldwide for a year. It will enable users to verify the authenticity of GNSS data, thereby greatly helping to detect instances of spoofing. A declaration of initial service is foreseen for 2023, and the first OSNMA-capable receivers are already on the market.
Galileo’s High Accuracy Service (HAS) signal has been available worldwide with orbit and clock corrections and biases for Galileo and GPS since July 22. While it is still in its validation phase, it is already performing very well and an initial service declaration is expected by the end of the year, including an Internet-based correction distribution service.
Galileo is also developing an emergency warning service that will use the L1 band to broadcast alerts and guidance to populations at risk of natural disasters. It is expected to enter service in 2024 and reach any Galileo-enabled device, of which there are already about three billion. Other services will include advanced timing, space service volume (to aid in the positioning and navigation of spacecraft in high-Earth orbits), advanced receiver autonomous integrity monitoring (ARAIM), and predictions of ionospheric perturbations.
Like so much else, completion of the Galileo constellation was affected by Russia’s war in Ukraine, because two launches planned for this year from French Guyana aboard Russian Soyuz rockets were scrapped.
Finally, one of my favorite quotes from Galileo: “Measure what can be measured and make measurable what cannot yet be measured.”
Europe’s leading companies and research institutes working on positioning, navigation and timing (PNT) technologies met in the Netherlands in mid-June for this year’s NAVISP Industry Days. The event is devoted to the latest developments in the Navigation Innovation and Support Program (NAVISP), sponsored by the European Space Agency (ESA).
NAVISP is focused on navigation technologies beyond Galileo and EGNOS, with many of the same engineers that led the development of Europe’s own satnav constellation working with European industry and academia on exciting new concepts.
Photo: ESA
About 130 people participated in the two-day event, which took place June 16-17 at the ESA-ESTEC center in Noordwijk aan Zee, The Netherlands.
As well as attending presentations on NAVISP projects, participants had the opportunity to meet and talk shop in the exhibition area, which displayed products and hardware such as an improved-accuracy smartphone board and drones for data gathering.
The PNT sector accounts for 10% of the European economy.
Throughout Industry Days, the importance of innovation for competitiveness was highlighted, to enable companies to adapt to rapid technological change in the fast-growing PNT sector, which today accounts for 10% of the European economy.
“NAVISP’s strength lies in supporting all types of actors, from start-ups and SMEs to large enterprises, and space companies to companies in other sectors that have recognized the added value of PNT solutions,” said Pierluigi Mancini, NAVISP program manager. “That means playing a part in advancing research and product development, as well as commercialization to broadly foster and support European industry in addressing technology, market and regulatory risks.”
At the Industry Days, many different projects across varying market areas along different points in the value chain were highlighted such as air mobility testbeds, new technologies for roads and other infrastructure, support for maritime navigation, development of novel PNT satellites, studies for quantum-based PNT, and weather monitoring based on collaborative crowdsourcing.
The innovation potential of NAVISP activities was underlined by the fact that two new Navigation Directorate programs set to be proposed to ESA’s Council of Ministers this November — the in-orbit demonstration of low-Earth orbit PNT services and the GENESIS mission for precision Earth measurement — originated in NAVISP projects.
The entire set of the NAVISP Industry Days presentations can be found here.
Image: GPS World; outdoor, Andriy Solovyov/Shutterstock.com; indoor, Rade Kovac/Shutterstock.com
\Registration is now open for the fifth GNSS Raw Measurements Task Force meeting, which will take place on May 17. Participation is online, where participants will gain access to Task Force members’ experience and learn about progress on using raw measurements in Android devices.
The aim of the EUSPA’s Raw Measurements Task Force is to bridge the knowledge gap between raw measurement users. The meetings of the task force are a key element in this effort, providing a forum for stakeholders to share experience and knowledge around raw measurements use.
Following a welcome address from Fiammetta Dianithe, EUSPA’s head of Market, Downstream and Innovation (MADI) Department, the opening session will include a keynote presentation from Google`s Frank Van Diggelen and Mohammed Khider. Updates on EGNSS opportunities from the Galileo programme will be provided by members of the MADI team.
After the break, the agenda will be dedicated to presentations from Task Force members, targeting their innovative work using raw measurements. The last session focuses on testing results and implementation of EGNSS differentiators. For the full draft agenda, click here.
Since its launch in 2017, the task force has expanded from a handful of experts to a community of more than 100 agencies, universities, research institutes and companies. Membership is open to anybody interested in GNSS raw measurements. To join the task force, contact [email protected].
Russia’s brutal aggression on Ukraine changed the world in a few days. Devastation and displacement in Europe already are on a scale unseen since World War II, and the risk of a catastrophe greater by orders of magnitude has not been as high since the Cuban Missile Crisis of 1962, the year I was born. Given the long production timeline of a monthly magazine, I will not venture a guess as to what the headlines will be on the day you read this.
The Russian assault has sharply raised concerns about GNSS vulnerabilities. In a March 17 bulletin, the European Union Aviation Safety Agency (EASA) warned of a GNSS outage leading to the degradation of navigation and surveillance. Reports analyzed by EASA indicate that since Feb. 24, GNSS spoofing and jamming has intensified in the Baltic Sea, neighboring states, Eastern Finland, the Black Sea and the Eastern Mediterranean. “The effects of GNSS jamming and/or possible spoofing,” the bulletin stated, “were observed by aircraft in various phases of their flights, in certain cases leading to re-routing or even to change the destination due to the inability to perform a safe landing procedure.”
Russia already has aided in the proliferation of handheld GPS jammers, the deployment of road-mobile jammers, and even development and testing of space-based jammers. Now, it could turn its substantial cyberspace hacking capability against the ground-control segments of GPS and Galileo.
When Russia tested an anti-satellite weapon on Nov. 15, 2021, the Kremlin claimed on state television that this capability “means that if NATO crosses our red line, it risks losing all 32 of its GPS satellites at once.” This threat was particularly dangerous because GPS satellites carry, as a secondary payload, the U.S. nuclear detonation detection system.
At a panel discussion about resilient GPS that I moderated at the International Wireless Communications Expo in Las Vegas on March 24, Diana Furchtgott-Roth, an adjunct professor at George Washington University and former deputy assistant secretary for Research and Technology at the U.S. Department of Transportation (DOT), titled her presentation “Russia Proves America Needs Backup GPS.” She cited the National Defense Authorization Act of 2017, the National Defense Authorization Act of 2018, and the National Timing Resilience and Security Act of 2018, which instructed DOT to provide a complement and backup for civilian GPS. The legislation required the Secretary of Transportation to put in place a backup system for GPS by the end of 2020, subject to congressional appropriations. However, she pointed out, these funds have not yet materialized.
Multiple technologies can and should be used to complement GPS. Several of them are mature and commercially available, including signals from low Earth orbit satellites and terrestrial broadcast stations.
Meanwhile, the United States should accelerate the launch schedule for GPS III satellites already produced. They provide better accuracy, anti-jamming capabilities, and opportunities for civilian connectivity that could offer critical assistance to its European allies.
NAVISP includes projects for autonomous and connected driving. (Image: ESA/F. Bagiana)
Many of the experts that designed and oversaw the Galileo system are now supporting European companies in developing new navigation technologies and services through the Navigation Innovation and Support Programme (NAVISP) of the European Navigation Agency (ESA).
NAVISP supports navigation research and development, such as ways to improve satellite navigation, alternative positioning systems, and new navigation services and applications. Working in partnership with European industry and researchers, more than 200 NAVISP projects have been initiated so far.
NAVISP is divided into three elements.
Element 1 focuses on improving and expanding satellite navigation, as well as establishing novel positioning, navigation and timing (PNT) services.
Element 2 focuses on innovation for competitiveness, developing new PNT products and services.
Element 3 supports European Union Member State priorities, including support for national testbeds and programs.
An expert has warned the government of the United Kingdom that the lack of an alternative to Galileo threatens to put critical infrastructure at risk, according to a report in Daily Express.
Andy Proctor, formerly with the satellite and positioning, navigation and timing (PNT) cabinet office, submitted evidence of his concerns to the UK’s ministers.
“Our critical infrastructure is at risk from the loss of PNT, space-based or otherwise,” he wrote. “We are currently critically dependent upon GPS; the loss of which will have a major impact in capability and economically.”
Proctor is director of Rethink PNT, a consultancy firm.
He pointed out that the government disinvested in the eLoran terrestrial system that could have provided a backup, although this is slowly reversing.
“For 20 or so years there have been calls for action, yet the current status of inaction regarding the PNT strategy puts our systems at increasing risk, especially given the clear and present electronic-warfare systems being used in Europe today,” Proctor wrote.
Britain was removed from the Galileo project following Brexit, and has since been looking for an alternative PNT system.
Septentrio has released Open Service Navigation Message Authentication (OSNMA) functionality on its mosaic GNSS receiver modules. OSNMA offers end-to-end authentication on Galileo’s civilian signals, protecting receivers from OSNMA attacks.
Spoofing is a malicious form of radio interference, where faulty positioning information is sent to a receiver. For the last two years Septentrio has been working closely with the European Space Agency (ESA) during the test phases of OSNMA deployment. The know-how gained during this period is what allowed Septentrio to be one of the first to market with this advanced security feature.
OSNMA’s anti-spoofing capability complements Septentrio’s Advanced Interference Mitigation technology, AIM+, and further strengthens the overall security of Septentrio GNSS receivers, making them suitable for assured PNT solutions as well as critical infrastructure, such as 5G network synchronization.
“We are excited to start offering the OSNMA anti-spoofing technology in our industrial GNSS receivers. Our close collaboration with ESA enabled us to get the expertise needed to implement and validate this functionality in a timely manner,” said François Freulon, head of Product Management at Septentrio. “The addition of OSNMA to Septentrio’s already strong anti-jamming and anti-spoofing technology takes our receivers to a new level as the market leader of resilient positioning and timing solutions for industrial applications and critical infrastructure.”
OSNMA is now supported by the complete mosaic receiver family including GNSS RTK positioning modules, timing modules and heading receiver modules. It will also be rolled out on Septentrio’s latest generation of OEM receiver boards, AsteRx-m3, and subsequently on the ruggedized boxed receivers. Read more here.
The Munich Satellite Navigation Summit program is now online and registration for the event is open. The summit will be held online March 7-8.
The Munich Satellite Navigation Summit focuses on satellite navigation in the present day and future, featuring global speakers and highlighting the latest developments in the field of GNSS. This year’s theme is “AI in GNSS – Intelligence brought to Navigation”.
The summit will feature 12 sessions from industry experts, including sessions on the following topics:
First and Second Generation of the European Satellite Navigation System Galileo
Modernization of the US Global Positioning System
Status and modernization of the Russian Global Satellite Navigation System GLONASS and the Chinese Beidou System (BDS)
Developments of regional systems like the Japanese QZSS and the Indian IRNSS and the Korean Positioning System (KPS)
Use of AI within the navigation world and its implications
By Francesco Ardizzon, Nicola Laurenti, Carlo Sarto and Giovanni Gamba
To ensure the authenticity of the Galileo navigation messages, the Open Service navigation message authentication (OSNMA) mechanism requires a loose synchronization between the receiver clock and the system time.
To ensure the authenticity and the integrity of the transmitted messages, the Timed Efficient Stream Loss-tolerant Authentication (TESLA) protocol for broadcast authentication requires a loose time synchronization between the transmitter and the receiver — that is, an upper bound to the time offset between their clocks. In the context of the TESLA-based Open Service navigation message authentication (OSNMA) protocol, it is customary to assume that:
On the system side, the transmission is synchronous because the satellites are equipped with high-precision atomic clocks, the drift of which is assumed negligible with respect to those at the receiver side.
At the receiver side, commercial clocks can be found that are less accurate and less stable, which accounts for the substantial time mismatch between the transmitter and the receiver clocks accumulating over time.
To limit the impact of such mismatch on OSNMA operation, it is envisioned that clocks for authenticated tachographs onboard vehicles, such as the ones that will be employed for the position authenticated tachograph for OSNMA launch (PATROL) project, are reset and precisely realigned to system time in periodic workshop visits. However, the clock mismatch must satisfy the OSNMA constraint at all times between successive workshop resets, in the “holdover” period, and through all possible operating conditions, to ensure constant authenticity of the navigation message.
In other contexts, this task is performed by such means as network synchronization protocols.
However, we are considering a scenario where, during holdover, we cannot rely on other sources, such as an internet connection or other devices to synchronize with the reference time to assure the authenticity of our time reference and, consequently, of the PVT solution. We also cannot trust any signal received during the holdover period, thus we should not use the PVT solution to synchronize the clock.
Here, we have two goals. First, investigate the causes of the misalignment and frequency deviation in clock generators commonly found on the market for GNSS receivers. Second, relate the clock specification parameters, taken directly from the real-time clock (RTC) device datasheets, the holdover period, and the OSNMA misalignment constraints.
Atomic clocks at ESTEC’s Navigation Laboratory in The Netherlands independently validate Galileo timing performance. (Photo: ESA)
Frequency Accuracy and Stability
Two metrics are usually employed to evaluate the performance of an oscillator.
Clock frequency accuracy is the normalized difference between the frequency output and its nominal value, f0.
Clock frequency stability is the normalized instantaneous frequency deviation from its local mean.
Although devices are characterized in terms of their stability, we are interested in measuring their accuracy y(t)ΔF(t)⁄f0, where ΔF(t) is the instantaneous frequency deviation from f0 at time t. The calibration performed during each workshop reset brings the residual misalignment to a negligible value called phase calibration error. On the other hand, we will later discuss the residual frequency deviation, due to the frequency calibration error.
The loose time synchronization requirement TL states that the authenticity of the navigation message received at time t is guaranteed if |ΔT(t)|≤TL, at every t during the holdover period.
Finally, we can relate accuracy and misalignment using the bound
(1)
which allows us to upper bound the clock misalignment at any time t in terms of the frequency accuracy along the whole interval elapsed from the last calibration time t0.
Accuracy Loss for Receiver Clocks
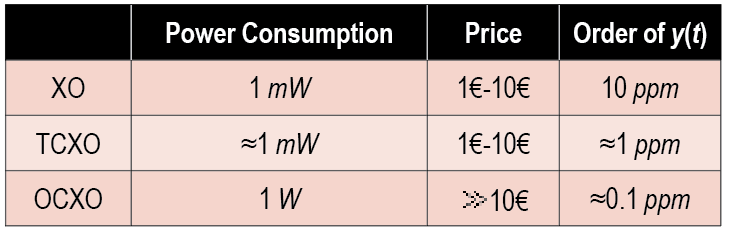
Thanks to their affordable price and wide temperature operating conditions, quartz crystal oscillators are used for clock generation in GNSS receivers (see TABLE 1). We distinguish among simple, temperature-controlled crystal oscillators (TCXOs) and oven-controlled crystal oscillators (OCXOs). GNSS receivers typically employ TXCOs because they offer the best trade-off in terms of power consumption, price and typical accuracy.
Table 1. Summary of the main quartz crystal oscillator characteristics.
Sources of Frequency Accuracy Loss. Quartz crystals are piezoelectric materials, therefore any additional stresses and environmental changes generate an additional voltage, decreasing the clock stability. In the automotive scenario, the main sources of accuracy loss are temperature changes, long-term aging, and the residual calibration frequency offset, while the impact of accelerations, vibrations, gravity variation and supply voltage oscillation can safely be neglected as they result in changes of a few parts per billion.
Currently, no analytic relationship is known between frequency accuracy and temperature for TCXOs (or OCXOs). Therefore, as reported in datasheets, the inaccuracy induced by the temperature changes is bounded by a constant value Ytemp across the whole operating temperature range. This yields a bound on the clock misalignment that increases linearly with the time from the last calibration.
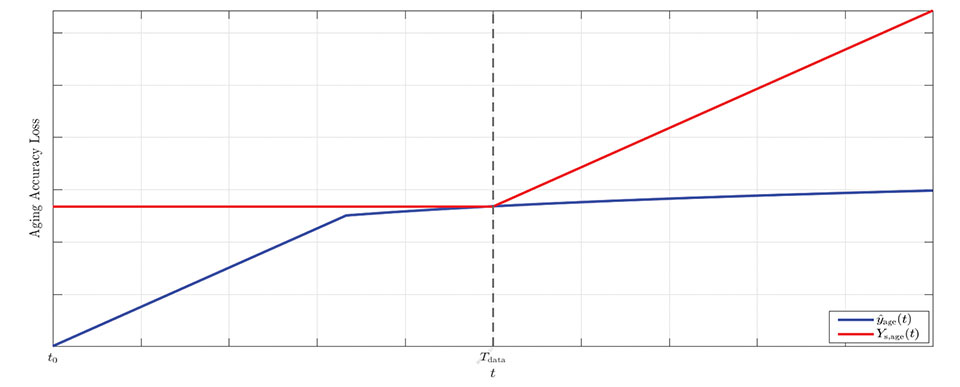
Long-term aging has significant impacts on the clock frequency accuracy and may affect the device even when it is not used for a long time (see Figure 1). A critical aspect of this effect is that it is time-variant, with the accuracy loss increasing over time.
Figure 1. Graphical representation of the model for aging accuracy loss: upper-bound (red) versus estimated model (blue). (Image: R. Filler and J. Vig)
However, datasheets typically report a single value, Yage (Tdata ), which bounds the accuracy at a fixed time Tdata.
The effect of long-term aging for both TCXOs and OCXOs was investigated in a 1993 study by R. Filler and J. Vig measuring the accuracies of oscillator models for several years. The study concluded that a logarithmic fit is better suited for long-term measurements, while a linear fit is better suited for initial measurements (t<30 days) and is a loose upper-bound for longer times. Because we are interested in establishing a prudential upper bound rather than a precise estimate, we use the constant upper bound Yage (Tdata) for all t<Tdata and a linear upper bound for t>Tdata. This leads to a linearly increasing bound on the time offset before Tdata, and a quadratically increasing bound after Tdata.
Finally, the misalignment due to the frequency calibration error accumulates over time. An off-the-shelf oscillator has an initial accuracy that depends on the frequency tolerance ftol. To improve this, a precise calibration is performed, trying to synchronize the RTC with the nominal frequency f0, such as by using PTP. The contribution to the accuracy loss given by calibration can be bounded by Ycalib, a value set a priori either by system design or during the calibration process itself, yielding again a linearly increasing bound on the clock misalignment.
Bound on the Total Misalignment. In general, the cross-correlation between the uncertainties is unknown; we can only consider the worst-case scenario where the total uncertainty is bounded by the sum of the single bounds. This choice represents a prudential and conservative approach that may yield a rather loose bound with very high probability.
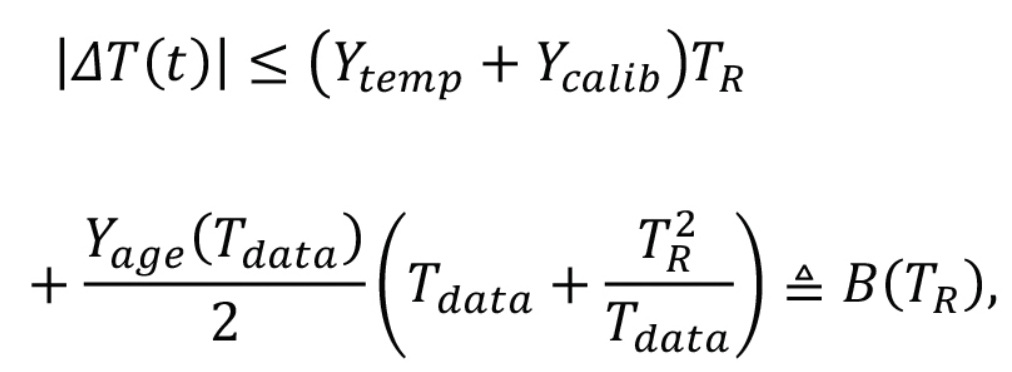
Thus, considering that all terms in the clock error bound increase over time, we can bound the total misalignment as
(2)
Example Values from Datasheet Specifications
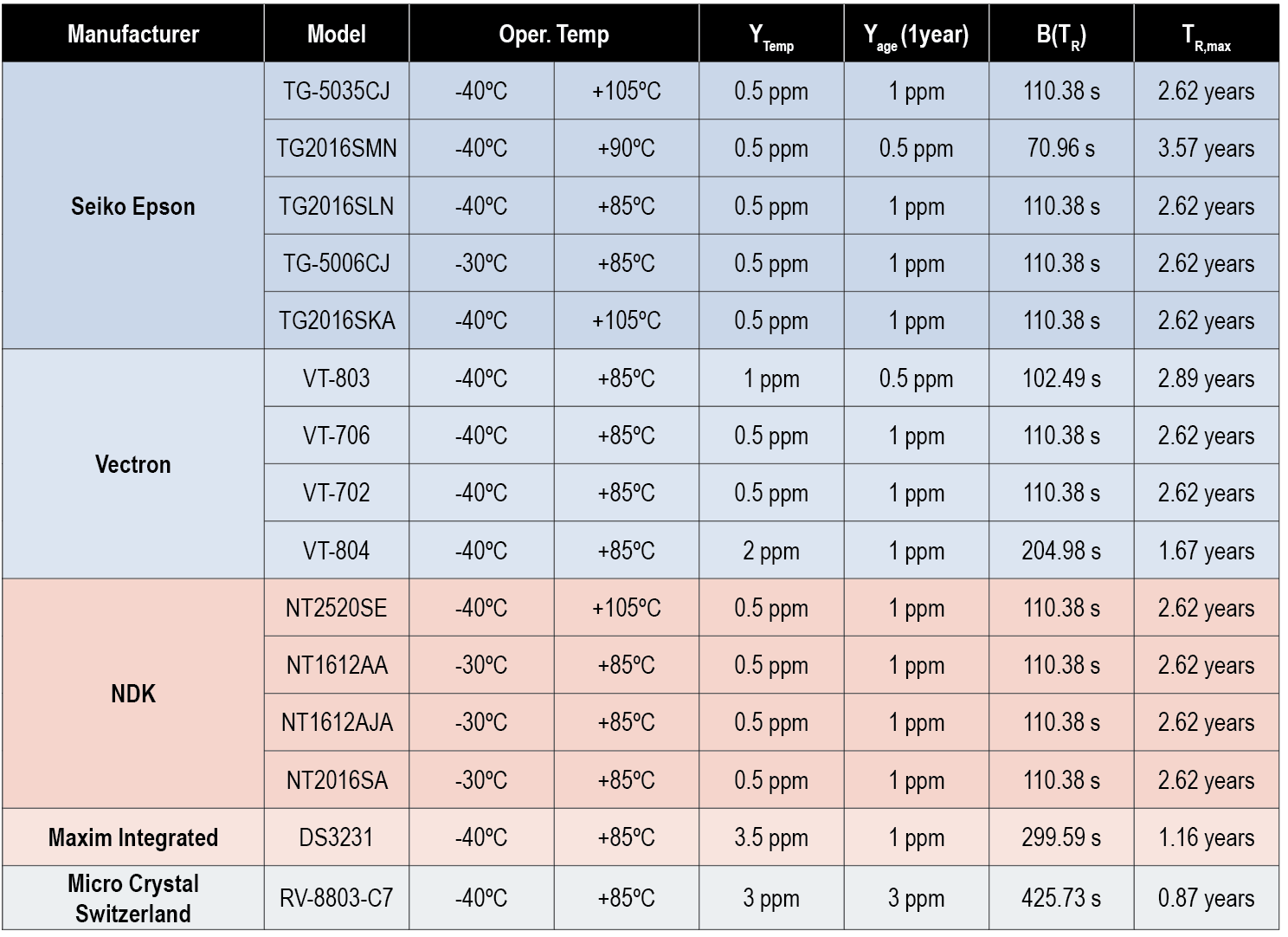
Based on the above result, we can deem a commercial oscillator suitable for OSNMA operation if B(TR )≤TL. We can then compare the requirements for different RTCs, focusing on TCXOs designed for GNSS receivers suitable for the automotive scenario, with f0=52 MHz and a target operating temperature range between –20° Celsius and +85° Celsius. We assume that devices are subject to a calibration process, such that YcalibYtemp; thus we have neglected the calibration accuracy loss. We report in Table 2 the values of the misalignment bound, B(TR ), for TR=2 years and the maximum reset period TR,max such that B(TR,max)≤TL, with a loose time synchronization requirement TL=165s, as computed form the specs found in the datasheets.
Table 2. Bound values B(TR) and TR,max computed using several RTCs’ datasheet specs with TL=165 s and TR=2 years.
Conclusions
To ensure the authenticity of the GNSS navigation message, the Galileo OSNMA protocol requires a loose synchronization between the transmitter and the receiver. The misalignment between transmitter and receiver clock needs to be lower than a threshold TL for the whole holdover period TR. In this article, we have investigated the causes of the misalignment and frequency deviation in clock generators commonly found on the market and defined a general relationship between TL ,TR and the specifications commonly found in datasheets. Finally, we examined several mass-market temperature-controlled crystal oscillator datasheets, evaluating their performance in terms of worst-case offset bound B(TR).
The bound represents a prudential conservative approach and may be rather loose. However, given the lack of a consistent statistical model, this is a reasonable solution. We conclude that most devices can satisfy the constraint B(TR)≤TL=165 s with a workshop reset period of TR = 2 years.
Acknowledgements
This study was conceived within the PATROL (Position Authenticated Tachograph foR OSNMA Launch) project, funded by the EU Agency for the Space Programme through the Fundamental Elements programme, under procurement No. GSA/OP/23/16 “Development, supply and testing of a Galileo open service authentication user terminal (OSNMA) for the GSA.”
The authors acknowledge the invaluable support provided by the PATROL technical team: Davide Marcantonio (Qascom), Fabio Pisoni, Giovanni Gogliettino and Domenico di Grazia (ST Microelectronics), Alexandre Allien and Francois Riou (FDC), Jacques Kunegel (ACTIA), Simón Cancela Díaz and Belén Villanueva Coello (GMV).
PATROL success was fostered by the commitment and support of Flavio Sbardellati (EUSPA Project Officer), Gonzalo Seco Granados and Alexander Rügamer (EUSPA external reviewers), Javier Simon (EUSPA reviewer), Ignacio Fernandez-Hernandez and Giovanni Vecchione (EC reviewers). The authors thank colleagues Giada Giorgi (UNIPD) and Lorenzo Dal Corso (Qascom) for reviewing this work.
The content of this publication does not reflect the official opinion of the European Union or of the EU Agency for the Space Programme. Responsibility for the information and views expressed therein lies entirely with the authors.
Francesco Ardizzon is a Ph.D. student and Nicola Laurenti an associate professor in the Department of Information Engineering of the University of Padova, Italy. Carlo Sarto is the head of the security engineering division and Giovanni Gamba the head of the SIGINT and EW division at Qascom S.r.l., in Bassano del Grappa, Italy.
REFERENCES
A. Perrig, R. Canetti, J. Tygar, and D. Song, “The TESLA broadcast authentication protocol,” RSA CryptoBytes, vol. 5, 11 2002.
I. Fernandez-Hernandez, T. Walter, A. Neish, and C. O’Driscoll, “Independent time synchronization for resilient GNSS receivers,” in 2020 International Technical Meeting of The Institute of Navigation, 02 2020, pp. 964–978.
I. Fernandez-Hernandez, V. Rijmen, G. Seco-Granados, J. Simon, I. Rodriguez, and J. D. Calle, “A Navigation Message Authentication proposal for the Galileo Open Service,” NAVIGATION, vol. 63, no. 1, pp. 85–102, 2016. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/navi.125
L. Cucchi, S. Damy, M. Paonni, M. Nicola, M. Troglia Gamba, B. Motella, and I. Fernandez-Hernandez, “Assessing galileo OSNMA under different user environments by means of a multi-purpose test bench, including a software-defined GNSS receiver,” in 4th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), 9 2021.
“IEEE standard definitions of physical quantities for fundamental frequency and time metrology—random instabilities,” IEEE Std 1139-2008, pp. c1–35, 2009.
J. Vig, “Quartz crystal resonators and oscillators for frequency control and timing applications – a tutorial,” in IEEE International Frequency Control Symposium Tutorials, 2016.
M. Lombardi, “Fundamentals of time and frequency,” in The Mechatronics Handbook, CRC Press, 01 2002, ch. 17.
R. Filler and J. Vig, “Long-term aging of oscillators,” IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 40, no. 4, pp. 387–394, 1993.
W. Riley and D. Howe, Handbook of Frequency and Stability Analysis. Special Publication (NIST SP), National Institute of Standards and Technology, Gaithersburg, MD, 2008-07-01 00:07:00 2008.
“Performance specification: oscillator, crystal controlled, general specification for,” MIL-PRF-55310F, 2018.
Arianespace will launch eight additional Galileo satellites, confirmed the European Union Agency for the Space Programme (EUSPA).
Arianespace will launch the first two satellites in 2022, leading to the Full Operational Capability of Galileo open service. Then, three successive launches on Ariane 62 in 2023, 2024 and 2025 will finalize the launch of the first generation of Galileo satellites and will increase the constellation resilience.
These will be the 13th to 16th Galileo missions by Arianespace, which has orbited all satellites in the constellation.
With this order, EUSPA takes over the role of placing launch services contracts for Galileo from the European Space Agency (ESA), which has acted so far in the name and on behalf of the European Commission and will continue to be the technical authority for these launches.
The order follows ESA’s order for the launch of four satellites in October 2021, and will complete the deployment of first-generation Galileo satellites.
The launches will take place from the Guiana Space Center, Europe’s Spaceport in Kourou, French Guiana. After a Galileo launch in the first half of this year, carrying satellites from a previous order, a second Soyuz launch this year will orbit the first two satellites from this latest order. The next three missions will orbit two satellites each on Ariane 62.
“I would like to thank ESA and EUSPA, along with the European Commission, for continuing to entrust us with their satellites,” said Stéphane Israël, CEO of Arianespace. “We’re very proud to once again be helping the EU deploy its own global navigation satellite system. This additional order to the service of Galileo once again confirms Arianespace’s assigned mission of ensuring reliable access to space for Europe.”
Each of the eight satellites under this order, built by OHB System AG in Bremen, Germany, will weigh less than 730 kg. They will join the 28 Galileo satellites already deployed to date, as well as the two to be orbited in early 2022 from the Guiana Space Center by Arianespace.
A new video celebrates the first decade of Europe’s satellite navigation system Galileo, which celebrates its 10-year anniversary on Oct. 21.
Galileo delivers meter-level accuracy anywhere on Earth. It is also saving lives, by relaying distress calls for search and rescue. Today, 26 Galileo satellites orbit 23,222 km above the Earth. The first was launched on Oct. 21, 2011; nine more launches followed to create the constellation.
The satellites in space are supported by a globe-spanning ground segment. The system as a whole is set to grow, with the first dozen Batch 3 about to join the current satellites in orbit and Galileo Second Generation satellites in development.