Join GPS World’s Survey and GIS Editor Eric Gakstatter March 15 for the webinar, “Everything Else but GPS: How GLONASS, Galileo, and Compass Will Affect High-Precision Users.” The webinar will be held at 10 a.m. Pacific (1 p.m. ET/6 pm. GMT); registration is free.
“In a rapidly changing world — which is the world of GPS and GNSS — those who invest significant amounts of their operating capital in hardware must plan carefully for the future,” said Gakstatter, who serves as moderator of the webinar. “Will your survey receiver remain relevant and up to date long enough for you to recoup your investment? How could taking advantage of newly operational constellations improve your efficiency and competitiveness? GLONASS is operational now. Compass has put forward a very aggressive schedule for regional and then global operations. Galileo is moving steadily forward.”
Gakstatter closely follows all these systems, and can relate their capabilities — current and future — directly to surveyors’ needs. His guest speakers will add to the insight. This webinar is required listening for anyone planning to stay on survey’s leading edge.
According to the GLONASS Information-Analytical Centre, proposals made at a December 27, 2011 meeting on the status and future of the satellite constellation included one to expand the GLONASS constellation to 30 satellites using six orbital planes. Five other options for upgrading the constellation were also aired, a draft of the tactical and technical requirements for GLONASS in 2025 was reviewed, and a report was given on the status the Glonass-K2 satellite under construction and the timing of the start of flight tests.
Present at the meeting of the Presidium of the TsNIImash Council, held in the Moscow suburb of Korolyov, were Yuri Urlichich, general director and general designer of the Joint Stock Company (JSC) Russian Space Systems, and Sergey Revnivykh, TsNIImash deputy director general, among others. TsNIImash (the Central Research Institute of Machine Building) is the arm of Roscosmos, the Russian Federal Space Agency, with responsibility for civil aspects of GLONASS.
A press conference following the meeting discussed the six options for upgrading the constellation, foremost among them the six-plane, 30-satellite concept. The other options include adding one more satellite to each of the existing three planes, but that would involve rephasing almost all of the operating satellites, which could cause many problems, according to Urlichich. Another option would add a reserve satellite to each operating satellite, but that option had already been rejected. Adding three new planes to the constellation, each with two satellites, is the leading option; Urlichich said this would be considered in detail over the next few months.
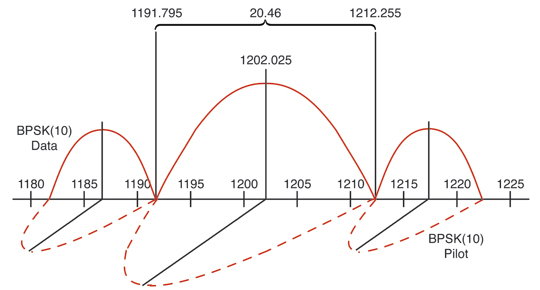
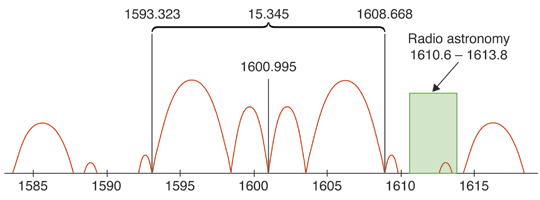
It is not clear how the present frequency division multiple access (FDMA) channel spectrum used by GLONASS could handle 30 satellites. As indicated in the current publicly available version of the GLONASS Interface Control Document (version 5.1, dated 2008), there are 14 available channels (channel numbers from -7 to +6), with antipodal satellites sharing the same channel. It appears that this arrangement can only handle a maximum of 28 satellites. However, at least one recent GLONASS spectrum plot shows GLONASS channels going from -7 to +8, rather than to +6 as in the ICD. Such an expansion to 16 channels could support 32 satellites and is a partial return to the pre-2005 use of higher frequency channels, although the Russians had previously agreed to abandon their earlier use of the higher channels to avoid interfering with radio astronomers’ use of the 1610.6-1613.8 MHz observation band to observe the spectral line of the hydroxyl molecule.
Nevertheless, the six-plane concept is still only just that — a concept — and the Russian Defense Ministry among others would have to get on board for it to go ahead.
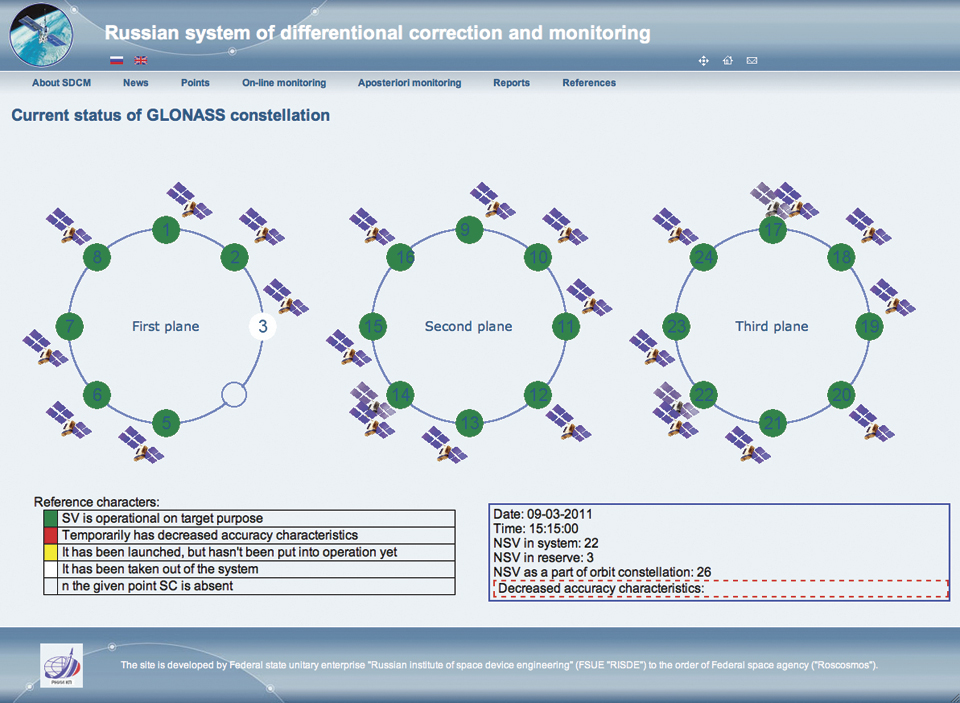
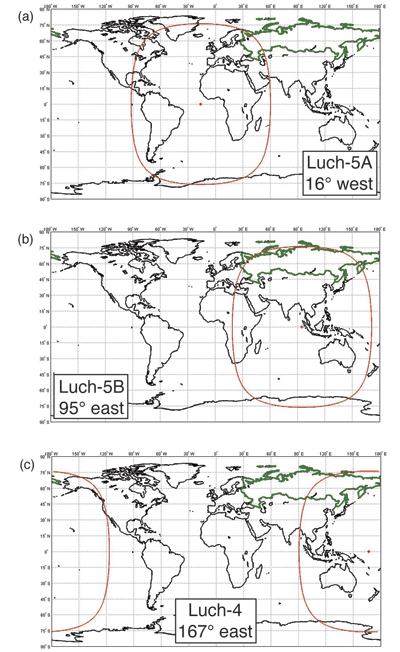
SBAS. Information on the Russian satellite-based augmentation system, the System for Differential Correction and Monitoring or SDCM, was also revealed during the press conference. SDCM will use a global ground network of monitoring stations and transponders on the Luch Multifunctional Space Relay System geostationary communication satellites to transmit correction and integrity data using the GPS L1 frequency. The first of these satellites, Luch-5A, was launched on 11 December.
Luch-5A is temporally located in a stable geostationary orbit at about 58.5 degrees east longitude according to U.S. tracking data. Testing of the satellite is being carried out at this location but it will eventually be deployed to 16 degrees west longitude for operational use. It was announced during the press conference that SDCM testing is to start after the Russian Christmas holidays.
Negotiations for additional SDCM ground stations in Australia, Indonesia, Brazil, and Nicaragua are ongoing to provide adequate coverage in the southern hemisphere. If one or more of the proposed ground stations cannot be realized, then additional stations at Russia’s Antarctic research bases could be deployed, Urlichich said. SDCM already has stations at the Bellingshausen and Novolazarevskaya research bases. Presentations by TsNIImash staff at international meetings have indicated that additional stations could be installed at the Progress and Russkaya Antarctic bases. According to Urlichich, the SDCM stations on Russian territory could be sufficient for northern hemisphere coverage.
Free downloadable software Toolkits at www.egnos-portal.eu can help cell-phone and handheld receiver developers enhance location and timing applications with GPS corrrection data from the European Geostationary Navigation Overlay Service (EGNOS) satellite-based augmentation system.
The Toolkits include software packages, demo applications, and supporting materials, enabling application developers, researchers, university students, and others to create, use, and maintain EGNOS-capable positioning applications.
For handheld receiver manufacturers and mobile-phone developers, the Toolkit contains free source code for easy integration of EGNOS capabilities into a smartphone, and all the necessary files for the demonstration application, for use as a basis for a new application, as well as core libraries, to integrate enhanced EGNOS positioning capability into an existing application.
For the simply curious, an EGNOS Toolkit provides a means of exploring and understanding the entire chain from the raw GNSS satellite signal to enhanced EGNOS positioning data.
The development kit provides an easy way incorporate all EGNOS corrections and integrity capabilities, allowing developers to perform real EGNOS integration directly into a smartphone. It works with different operating systems, including Android, Apple, and RIM.
Static and kinematic tests show that EGNOS performs well in both cases: “The EGNOS SDK provides an average increase of 30 percent in position accuracy over GPS alone,“ according to developer DKE Aerospace.
EGNOS Software Development Kit provides a software receiver to enhance GPS positions, displaying position accuracy increases on average of 30 percent.
DOT Blank Stare on LightSquared
The U.S. Department of Transportation (DoT) responded to a Freedom of Information Act (FOIA) request by GPS World for its recommendations to the National Telecommunications and Information Administration (NTIA) regarding LightSquared interference with GPS. The DoT wrote, “We are withholding two pages [of thirteen relevant pages] in part and eleven pages in their entirety,” and enclosed two completely blacked-out pages.
Kathy Ray, DoT FOIA officer, added, “We have determined that the release of the redacted and withheld portions would foreseeably cause harm to the government’s deliberative process.”
The blacked-out DOT letter is dated August 25, 2011. How it differs from the agency’s July 21 “LightSquared Impact Assessment,” publicly available courtesy of the U.S. House of Representatives Committee on Science, Space, and Technology, cannot, of course, be known.
The Department of Homeland Security wrote in response to GPS World’s FOIA request, “We conducted a comprehensive search of files with the Science and Technology Directorate’s Homeland Security Enterprise and First Responders Group, and Cyber Security Division for records that would be responsive to your request. Unfortunately, we were unable to locate or identify any responsive records.”
The National Institute of Standards and Technology of the Department of Commerce replied, “NIST has no documents that are responsive to your request.”
The Department of the Interior provided the same documents that were previously made public by the House committee.
The National Aeronautics and Space Administration made a similar determination, but did not send a document, referring instead directly to the committee’s public website.
PNT Board Hears Proposal for LightSquared Solution
The November 9 meeting of the National Space-Based Position Navigation and Timing (PNT) Advisory Board in Alexandria, Virginia got several earfulls regarding the LightSquared/GPS controversy. One of seven speakers on a two-hour panel, Javad Ashjaee, president and CEO of JAVAD GNSS, demonstrated his company’s newly developed filter technology that he said could protect GPS receivers from LightSquared broadband network interference.
As Ashjaee stated, the proposed solution does not protect against interference from the so-called high-10 signals, one of two bands (the other is known as the low-10) for which LightSquared has received a conditional waiver. Unless and until a solution for the terrestrial high-10 signals is found, LightSquared transmissions in that band will still interfere with the GPS signal. The technical solution proposed by JAVAD GNSS addressed only the low-10 band.
Proposed filter to “harden” high-precision GPS receivers against Lightsquared Lower 10 (click to enlarge.)
The JAVAD GNSS proposed fix consists, in simplified form, of a ceramic filter followed by a series of surface acoustic wave (SAW) filters.
A PDF of Ashjaee’s 76-slide Powerpoint demonstration, without his verbal explanations and commentary, along with other presentations from the board meeting, are available at www.pnt.gov/advisory/2011/11/. A December 8 GPS World webinar reprised the same presentation, and the download at env-gpsworld-integration.kinsta.cloud/webinar includes audio of Ashjaee’s remarks.
Ashjaee said that his company’s testing of its own filter methodology found no GPS signal loss due to a low-10 (10L) signal power of –10 dBm. An “Ultimate Test: Special Zero Baseline” put receivers on a Moscow skyscraper with multipath from both above and below. One antenna fed two receivers (zero baseline). One receiver used standard filtering and the other the new filters. He said that over 15 hours of testing the average carrier-phase error between the two receivers was 0.2 millimeters, and the average code difference was about 5 centimeters.
JAVAD GNSS has started production of what Ashjaee calls “LightSquared-compatible” Triumph GNSS receivers. He brought 40 units to the PNT Board meeting. The company will begin manufacturing “LightSquared-integrated” receivers in May 2012, for RTK positioning using the proposed LightSquared broadband network for high-speed communication, if and when it is deployed.
Fellow presenter Jim Kirkland, vice president and general counsel for Trimble Navigation, pointed out that such filters represented a potential solution only for one class of high-precision receivers. Whether it would work for other classes of high-precision receivers had yet to be verified. Kirkland said that even if further independent testing shows that the filter solution is viable at the lower 10 MHz of the spectrum, retrofits would be costly and time consuming.
Questions regarding cost and responsibility of retrofit, should the solution prove practical, were not discussed at length at the meeting, nor was any solution proposed.
LightSquared executive vice president Martin Harriman did not directly answer a question as to whether his company intends to develop the upper 10 MHz for which it has been given a conditional waiver.
Scott Burgett, software engineering manager for Garmin International, said, “It is almost impossible to design new products compatible with LightSquared’s proposed system without knowing its technology’s end state.” He estimated 10–15 years to properly retrofit Garmin devices, which are widely distributed in general aviation, personal navigation, car navigation, and other sectors, so that they could coexist with LightSquared.
The panel was moderated by Tom Stansell of Stansell Consulting, who concluded, “I think we learned, thanks to Javad, about a very clever solution to a particular problem for a particular range of products — the products he is most familiar with. It may or may not fit in some of the other applications.
“What we have not addressed is the elephant in the living room,” Stansell continued. “That is the cost, and time delay, and changeover process if LightSquared is allowed to go forward. Will it be the lower 10, upper 10? That has to be resolved. There are very large questions remaining to be discussed, and [they] may or may not be fully solved in a short period of time.”
Constellation Updates
Where Is Compass ICD?
The long-awaited signal interface control document (ICD) for China’s Beidou/Compass GNSS has not yet appeared, despite an announcement at the ION-GNSS conference by Chinese delegates that ICD document v1.0 will be published in 2011, “probably” in the month of October. When it does appear, it should be available for download on the Compass website, www.beidou.gov.cn (as yet without an English version), also at www.compass.gov.cn.
The delay in publishing a document may reflect a system very much in formulation, with ongoing discussions among the principal parties to its design, with different views on system architecture and possibly even final signal structure. This was one possible conclusion that could be inferred — a dynamic system in formation and growing rapidly — from varying reports given by different Chinese representatives, governent and academic, at the ION Compass session.
There was some disagreement among panelists at that time as to, for example, the final targeted number of satellites in the system: either 30, or 35.
The ICD has been rumored to be available previously to receiver manufacturers within China, creating some disgruntlement among companies outside the country. One of the ION panelists affirmed that GPS/Compass chips and receivers are being actively developed by many Chinese manufacturers and research institutes.
The next BeiDou/Compass launch, which will be for the system’s fifth inclined geosynchronous orbit satellite, is expected during the first few days of December, according to web discussions. As of press time for this magazine, there had been no official announcement on the Chinese official government BeiDou website, www.compass.gov.cn.
The site has posted Chinese and English versions of a document titled “Report on the Development of BeiDou (COMPASS) Navigation Satellite System (V1.0)” by the China Satellite Navigation Office. The pages are viewable as separate images.
Galileo Under Control
Europe’s first two in-orbit validation satellites reached their final operating slotss 23,222 kilometers above Earth, have been activated, and are now undergoing tests of their navigation payloads, reports the European Space Agency (ESA).
Marking the formal end of their Launch and Early Operations Phase, control of the satellites passed on November 3 from the French space agency (CNES) center in Toulouse to the Galileo Control Centre in Oberpfaffenhofen, Germany.
Oberfaffenhofen, operated by the German Aerospace Center (DLR), will be in charge of the satellites’ command and control for the whole of their 12-year operating lives. The navigation signals are being checked out by ESA’s ground station in Redu, Belgium, where a 20-meter antenna measures the shape of the signals to a high degree of accuracy. Once the navigation payload is fully checked out and activated, a second Galileo Control Centre in Fucino, Italy, will oversee all navigation services. All activities are performed under contract to SpaceOpal, a joint subsidiary of DLR and the Italian company Telespazio.
GLONASS as Expected
The Satellite System Mission Control Center of the Russian Ministry of Defence, with the ISS-Reshetnev Information Computation Center, established communication with the three GLONASS satellites launched November 4. The satellites are earth- and sun-oriented, and their subsystems are functioning properly.
According to NORAD tracking, the three satellites were inserted into Plane 1. This was expected as there are only seven active satellites in this plane, whereas the other two planes have a full complement of eight satellites. Orbit slot 3 in Plane 1 is currently vacant. According to Nikolay Testoyedov, ISS-Reshetnev general designer and director general, the new satellites will ensure the operation of a complete 24-satellite GLONASS constellation, and allow creating the necessary orbital reserve.
GPS GEO-MEO Floated
In a presentation titled “Analysis of Alternatives for Future GPS Architecture; Considerations for Constellation Sustainment,” made to the U.S. PNT Advisory Board on November 9, Kirk Lewis, senior advisor from the Institute for Defense Analyses (IDA), put forth the concept of “boosting” GPS III payloads onto commercial geostationary Earth-orbit (GEO) satellites.
After concluding that the current program of launches and orbit costs extending into the Block III-C generation is not sustainable, Lewis presented several alternatives, but quickly eliminated two that involved low-Earth-orbit satellites and non-space options, due to technical, scheduling, and performance issues. Remaining in play are “potential and realistic” GEO and mid-Earth orbit (MEO, the configuration of the present GPS constellation) options, used individually or in combination.
IDA analysis found that two GEO satellites, separated by 15 degrees or more longitude, supplied almost the same signal performance as adding six MEO satellites. The presentation is available at www.pnt.gov/advisory/2011/11/.
A one-chip multiconstellation GNSS receiver, now in volume production, has been tested in severe urban environments to demonstrate the benefits of multiconstellation operation in a consumer receiver. Bringing combined GPS/GLONASS from a few tens of thousands of surveying receivers to many millions of consumer units, starting with satnav personal navigation devices in 2011, followed by OEM car systems and mobile phones, significant shifts the marketplace. The confidence of millions of units in use and on offer should encourage manufacturers of frequency-specific components, such as antennas and SAW filters, to enter volume mode in terms of size and price.
One-chip GPS/GLONASS receiver trials in London, Tokyo, and Texas sought to demonstrate that the inclusion of all visible GLONASS satellites in the position solution, in addition to those from GPS, produces much greater availability in urban canyons, and in areas of marginal availability, much greater accuracy.
Multi-constellation receivers are needed at the consumer level to make more satellites available in urban canyon environments, where only a partial view of the sky is available and where extreme integrity is required to reject unusable signals, while continuing to operate on other signals deeply degraded by multiple reflection and attenuation. This article briefly outlines the difficulties of integrating a currently non-compatible system (GLONASS), offering an economic solution in the mass market where cost is king, but performance demands in terms of low signal, power consumption, time-to-first-fix, and availability are extreme. While the accuracy achieved is not at survey levels, we deem it sufficient to meet consumer demands even at the worst signal conditions.
The aim is to provide improved indoor and urban canyon availability for mass-market GNSS by using all available satellites; in 2011, that requires GLONASS support, as the constellation availability precedes Galileo by around three years. The aim is to overcome the hardware incompatibility issues of GLONASS, that is, its frequency division multiple access (FDMA) signal rather than the code division multiple access format used by GPS, different centre frequency, and different chipping rate, all without adding significantly to the silicon cost of the receiver chipset. This then allows a total satellite constellation of about 50 to be used at present, even before two recently launched Galileo IOV satellites.
It is expected that in benign conditions the additional satellites will give little benefit, as availability approaches 100 percent, and accuracy is excellent, with GPS alone. Though dominated by the ionosphere, using seven, eight, or nine satellites in the fix minimises the amount of error that feeds through to the final position.
In marginal conditions, where GPS can give a position, but is using 3/4/5 satellites and those are clustered in the narrow visible part of the sky resulting in poor DOP values, the increased number of satellites benefits the accuracy greatly, due to both improved DOP and multipath-error averaging. Limited satellites mean the full multipath errors map into position and are magnified by the DOP. Adding the second constellation means more clear-view satellites for accuracy, more total satellites to minimise the errors, and the errors are less magnified by the geometry due to better DOP.
In extreme conditions, where insufficient GPS satellites are seen to give a fix, the additional GLONASS satellites increase the availability to 100 percent (excluding actual tunnels).
Availability is a self-enhancing positive feedback loop… if satellites are always tracked, even if rejected on a quality basis by the RAIM/fault detection and exclusion (FDE) algorithms, then they do not need to be reacquired, so become available for use earlier. If position can be maintained, then the code phases for obstructed satellites can continue to be predicted accurately, allowing instant reacquisition after obstruction, and instant use as no code pull-in time is required. Once availability is lost, the reverse applies, as wrong position means worse prediction, longer re-acquisition, and hence again less availability.
The extra visible satellites are very significant for the consumer, particularly — as for example with self-assistance where the minimum constellation is five satellites, not three to four — to autonomously establish that all satellites are healthy using receiver-autonomous integrity monitoring (RAIM) methods. Self-assistance has further major benefits for GLONASS, in that no infrastructure is required, so there will be no delay waiting for GLONASS assistance servers to roll out. The GLONASS method of transmitting satellite orbits is also very suitable for the self-assistance algorithm, saving translation into and out of the Kepler format.
Significance of Work
Previous attempts to characterize the multi-constellation benefits in urban environments have been handicapped by the need to use professional receivers not designed for such signal conditions, and by the need to generate a separate result for each constellation or sacrifice one satellite measurement for clock control. These problems made them unrepresentative of the performance to be expected from the volume consumer device.
This new implementation is significant in being a true consumer receiver for high sensitivity, fully integrated both for measurement and for computation. Thus fully realistic trials are reported for the first time.
Background
The tests were performed on the Teseo-II single chip GNSS receiver (STA-8088). A brief history: our 2009 product Cartesio+ already included GPS/Galileo, and the digital signal processor (DSP) design has been extended to include GLONASS also for Teseo2, the 2010 product. Test results with real signal data through FPGA implementations of the baseband started in late 2009, and with the full product chip in 2010.
The architectural design showed that the silicon could be implemented with only small additional silicon area. Changes to the baseband DSP hardware and software were small and were included in the next scheduled upgrade of the chip, Teseo2. The RF chip silicon requires much greater attention, duplicating the intermediate frequency (IF) path and analog-digtal converter (ADC), with additional frequency conversion and a much wider IF filter bandwidth; however, as the RF silicon area is very small in total, even a 30 percent increase here is not a significant percentage increase on the whole chip. As the design is for an integrated single chip system (RF and baseband, from antenna to position, velocity, and timing (PVT) solution), the overall silicon area on a 65-nanometer process is very small.
Commercially, it is new to include all three constellations in a single consumer chip. Technically it is new to use a pool of constellation-independent channels for GLONASS, though standard for GPS/Galileo. Achieving this flexibility has also required new techniques to manage differing RF hardware delays, different chipping rates, in addition to the coordinated universal time (UTC) offset and geoid offset problems already well known to the surveying community.
It is also very unusual to go direct to a single-chip solution (RF+baseband+CPU) for such a major technology step. The confidence for this step comes from the provenance of the RF and the baseband, the RF being an extension of the STA5630 RF used with Cartesio+, and the baseband being significant but not major modifications of the GPS/Galileo DSP used inside Cartesio+. 5630/Cartesio+ were proven in volume production as separate chips before the single-chip three-constellation chip starts production.
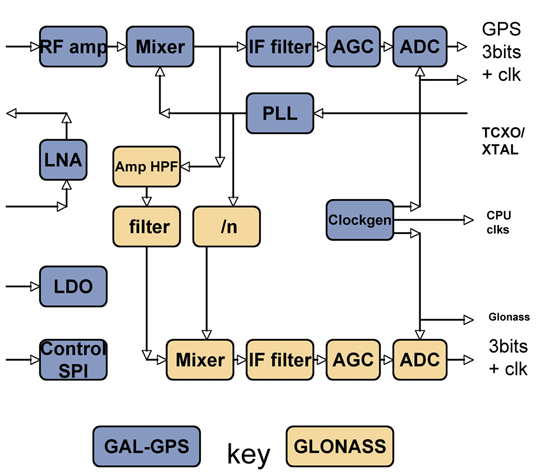
The steps forward from the previous generation of hardware are on chip RF, Galileo support, GLONASS support. While Galileo can pass down the existing GPS chain, with appropriate bandwidth changes, additional changes are required for GLONASS: see Figures 1 and 2.
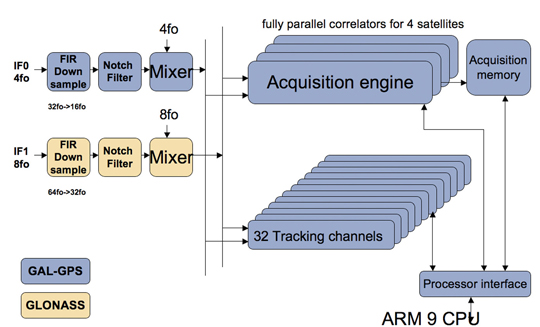
Figure 1. RF changes to support GLONASS.Figure 2. Baseband changes to support GLONASS.
In the RF section, the LNA, RF amp, and first mixer are shared by both paths, in order to save external costs and pins for the equipment manufacturer, and also to minimize power consumption. Then the GLONASS signal, now at around 30 MHz, is tapped off into a secondary path shown in brown, mixed down to 8 MHz and fed to a separate ADC and thus to the baseband.
In the baseband, an additional pre-conditioning path is provided, again shown in brown, which converts the 8 MHz signal down to baseband, provides anti-jammer notch filters, and reduces the sample rate to the standard 16fo expected by the DSP hardware.
The existing acquisition engines and tracking channels can then select whether to take the GPS/Galileo signal, or the GLONASS signal, making the allocation of channels to constellations completely flexible.
Less visible but very important to the system performance is the software controlling these hardware resources, first to close tracking loops and take measurements, and secondly the Kalman filter that converts the measurements to the PVT data required by the user. This was all structurally modified to support multiple constellations, rather than simply adding GLONASS, in order that future extensions of the software to other future systems becomes an evolutionary task rather than a major re-write.
The software ran on real silicon in 2010, but using signals from either simulator or static roof antennas, where accuracy and availability of GPS alone are so good that there is little room for improvement. In early 2011, prototype satnav hardware using production chips, antennas, and cases became available, making mobile field trials viable.
Actual Results
Results have already been seen from trials using professional receivers with independent GPS and GLONASS measurements. However, those tests were not representative of the consumer receiver because they are not high sensitivity; because the receivers require enough clean signal to operate a PLL, which is not realistic in a mobile city environment; and because they were creating two separate solutions, thus needing a continuous extra satellite to resolve inter-system time differences.
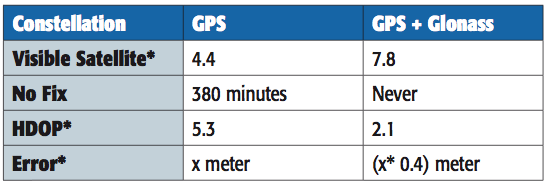
A 2010 simulation of visible satellites in a typical urban canyon of downtown Milan, Italy, produced the results, every minute averaged for a full 24 hours, shown in Table 1. The average number of satellites visible rises from 4.4 with GPS alone, to 7.8 for GPS+GLONASS, with the result that there are then zero no-fix samples. With GPS alone there were 380 no-fix samples, or 26 percent of the time.
Table 1. Accuracy and availability of GPS and GPS+GLONASS, averaged over 24 hours.
However, availability is not itself sufficient. Having more satellites in the same small piece of sky above the urban canyon may not be sufficient, due to geometric accuracy limitations. To study this, the geometric accuracy represented by the HDOP was also collected, and shows an accuracy 2.5 times better.
Previous studies suggested that in the particular cities tested, two to three additional satellites were available, but one of these was wasted on the clock solution. Using the high-sensitivity receiver, we expected four or five extra satellites and none wasted.
The actual results far exceeded our expectations. Firstly, many more satellites were seen, as all previous tests and simulations had excluded reflected signals. Having many more signals, the DOP was vastly improved, and the effect of the reflections on accuracy was greatly reduced, both geometrically, and by the ability of the FDE/RAIM algorithms to maintain their stability and down-weight grossly erroneous signals rather than allow them to distort the position.
The results presented here are from a fully integrated high-sensitivity receiver optimized to use signals down to very low levels, and to give a solution derived directly from all satellites in view, no matter which constellation.
This produces 100 percent availability, and much improved accuracy in the harsh city environment.
Availability
The use of high-sensitivity receivers, not dependent on phase-locked loops (PLLs) for tracking, produces 100 percent availability in modern cities, even high-rise, due to the reflective nature of modern glass in buildings, even for GPS alone. Thus some other definition of availability is required rather than “four sats available,” such as sats tracked to a certain quality level, resulting in a manageable DOP. Even DOP is difficult to assess, as the Kalman filter gives different weights to each satellite, not considered in the DOP calculation, and also uses historic position and current velocity, in addition to instantaneous measurements, to maintain the accuracy of the fix.
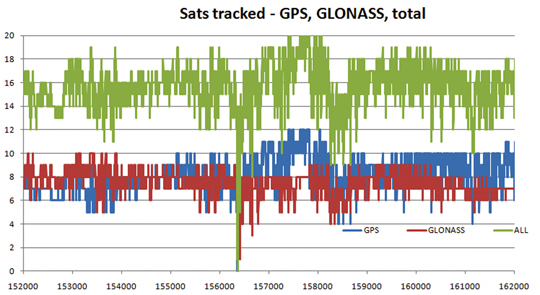
Figure 3 shows the availability of tracked satellites in tests in the London City financial district in May 2011.
As can be seen, there are generally seven to eight GLONASS satellites and eight to nine GPS satellites, for a total of around 16 satellites. The only period of non-availability was in a true tunnel (Blackfriars Underpass) at around time 156400 seconds. In other urban canyons, around time 158500 and 161300, individual constellations came down to four satellites, but the total never fell below eight. Note this is an old city, mainly stone, so reflections are limited compared with glass/metal buildings.
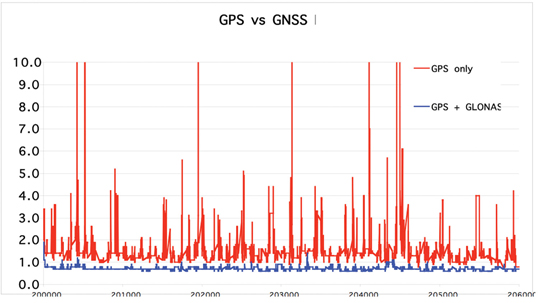
While outside tunnels, availability is 100 percent, this may be limited by DOP or accuracy. As can be seen in Figure 4 on another London test, the GNSS DOP remains below 1, as might be expected with 10–16 satellites, while GPS-only frequently exceeds four, with the effect that any distortions due to reflections and weak signals are greatly magnified, with several excursions over 10.
Figure 4. GPS-only versus combined GPS/GLONASS dilution of precision.
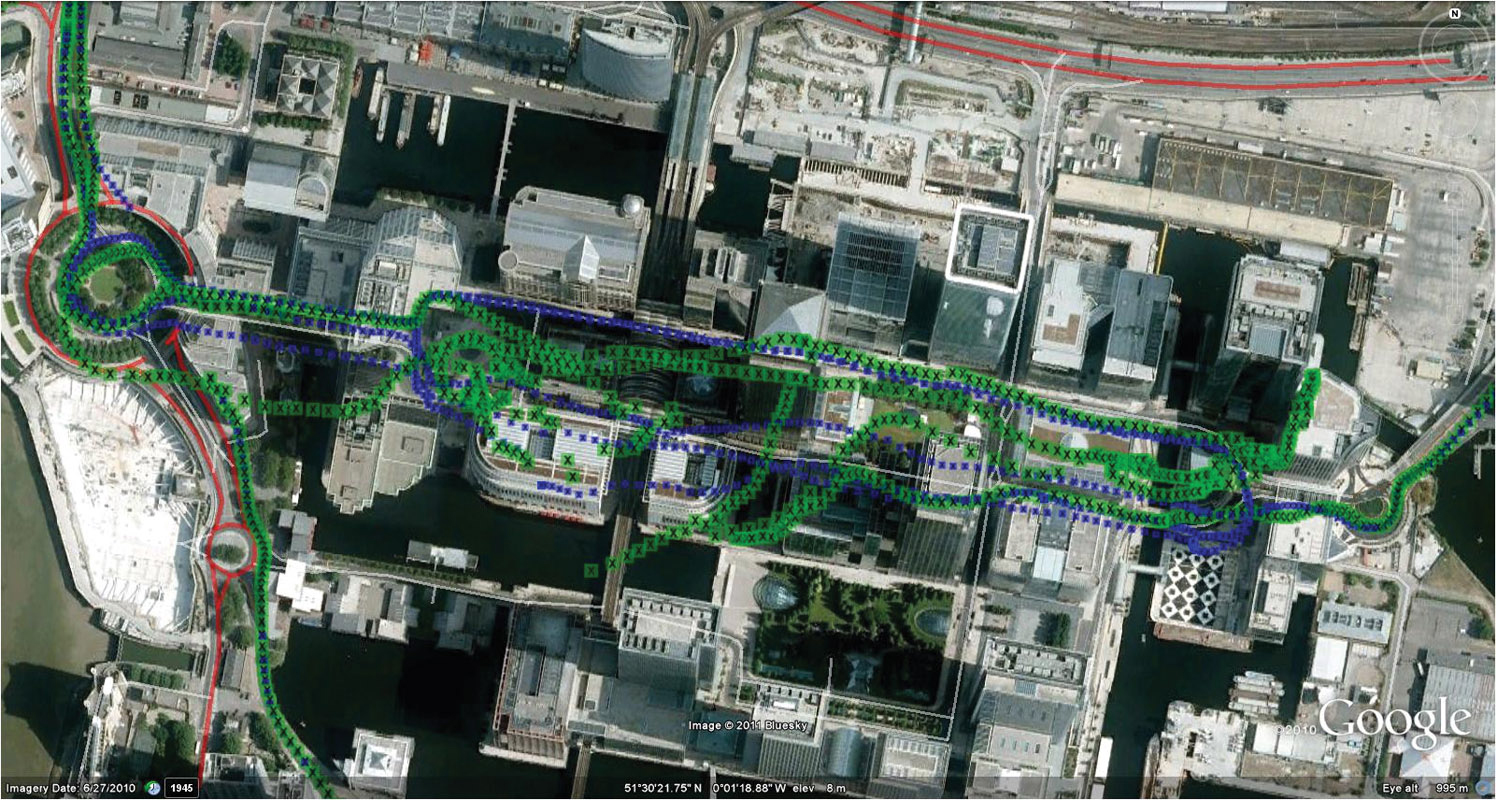
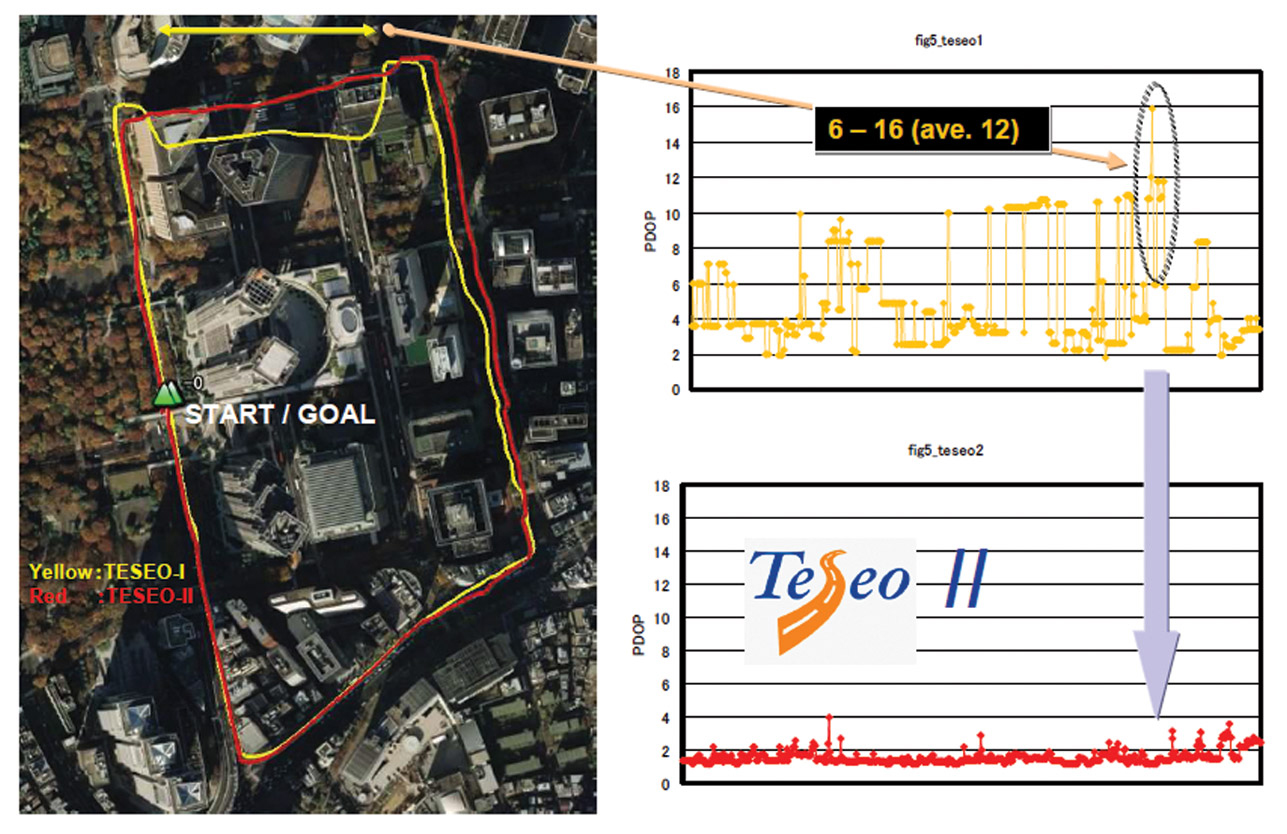
As the May 2011 tests had not been difficult enough to stress the GPS into requiring GNSS support, a further trial was performed in August 2011. This was in a modern high-rise section of the city, Canary Wharf, shown in Figure 5 on an aerial photograph. In addition to being high-rise, the roads are also very narrow, resulting in very difficult urban canyons. Being a modern section of the city, the buildings are generally reflective glass and metal, rather than stone, testing RAIM and FDE algorithms to the extreme.
Figure 5. GPS versus GNSS, London Canary Wharf (click to enlarge.)
This resulted in difficulty for the GPS-only solution, shown in green, especially in the covered section of the Docklands station, center-left, lower track.
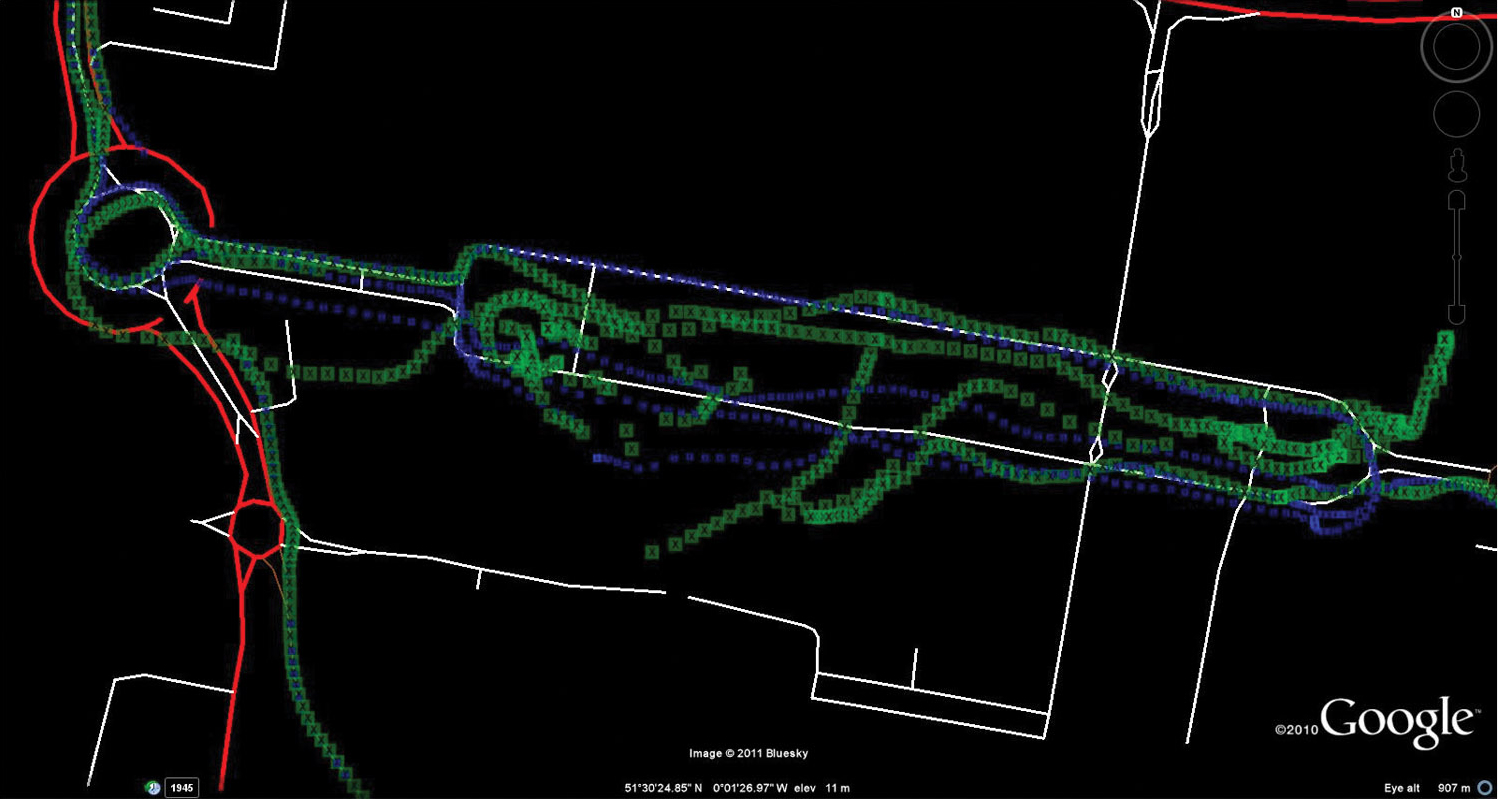
Figure 6 shows the same test data displayed on truth data taken from the ordnance survey vector map data of the roads.
Figure 6. GPS versus GNSS, London Canary Wharf, on vector truth (click to enlarge.)
The blue GNSS data is then extremely good, especially on the northern (eastbound) part of the loop (UK drives on the left, thus one-way loops are clockwise).
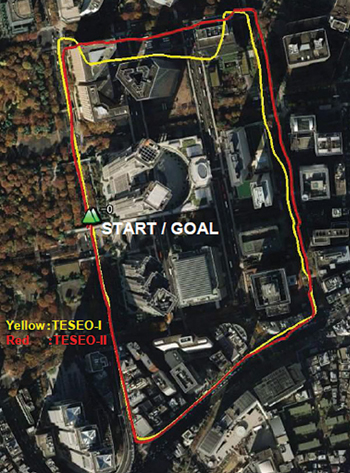
Further tests were carried out by ST offices around the world. Figure 7 shows a test in Tokyo, where yellow is the previous generation of chip with no GLONASS, red was Teseo-II with GPS plus GLONASS.
Figure 7. Teseo-I (GPS) versus Teseo-II (GNSS) in Tokyo test.
Again, here the scenario is not sufficiently challenging to hurt the availability even of GPS alone, but the accuracy is limited.
Figure 8 gives some explanation of the accuracy problems, by showing the DOP during the test. It can be seen that Teseo-II DOP was rarely above 2, but the GPS-only version was between 6 and 12 in the difficult northern part of the test, circled for illustration.
Figure 8. DOP during Tokyo tests (click to enlarge.)
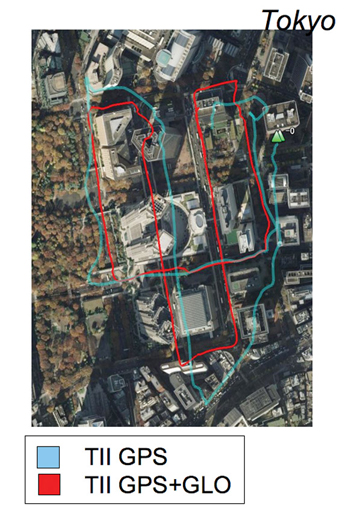
Further Tokyo tests were performed entering the narrower urban canyons in the same test area, shown in Figure 9. Blue is GPS only, red is GPS+GLONASS, and the major improvement is obvious.
Figure 9. GPS only (blue) versus GNSS (red), Tokyo.
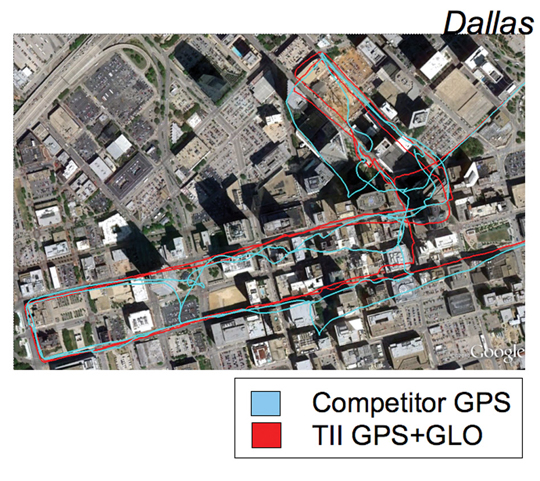
Figure 10 uses the same color scheme to illustrate tests in Dallas, this time with a competitor’s GPS receiver versus Teseo-II configured for GPS+GLONASS, again a huge benefit.
Figure 10. GPS only (blue, competitor) versus GNSS (red), Dallas.
Other Constellations
While Teseo-II hardware supports Galileo, there are no production Galileo satellites available yet (September 2011), so the units in the field do not have Galileo software loaded.
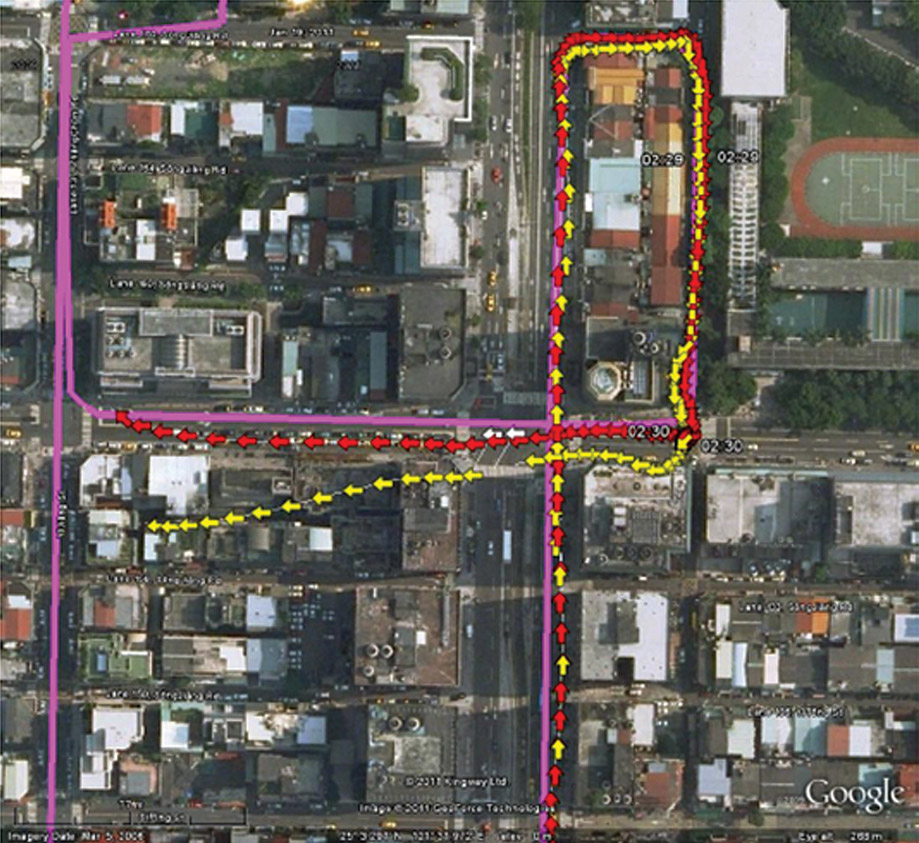
However, the Japanese QZSS system has one satellite available, transmitting legacy GPS-compatible signals, SBAS signals, and L1C BOC signals. Teseo-II can process the first two of these, and while SBAS is no benefit in the urban canyon as the problems of reflection and obstruction are local and unmonitored, the purpose of QZSS is to provide a very high-angle satellite, so that it is always available in urban canyons.
Figure 11 shows a test in Taipei (Taiwan) using GPS (yellow) versus GPS plus one QZSS satellite in red, with the truth data shown in purple.
Figure 11. GPS only (yellow) versus GPS+QZSS(1 sat, red), truth in purple, Taipei (click to enlarge.)
Further Work
The test environment will be extended to yield quantitative accuracy results for UK tests where we have the vector truth data for the roads.
The hardware flexibility will be extended to support Compass and GPS-III (L1-C) signals, in addition to Galileo already supported. Acquisition and tracking of these signals have already been demonstrated using pre-captured off-air samples.
In 2010, the Compass spec was not available. Thus the Teseo-II silicon design was oriented to maximum flexibility in terms of different code lengths, such as BOC or BPSK, so that by using software to configure the hardware DSP functions, the greatest chance of compatibility could be achieved.
The result was only a marginal success, in that the 1561 MHz frequency of the regional Compass system can only be supported using the flexibility of the voltage-controlled oscillator and PLL, meaning that it cannot be supported at the same time as other constellations. Additionally, the code rate on the regional system is also 2 M chips/second, which is not supported, so is approximated by using alternate chips, producing serious signal loss.
So the hooks for Compass are only useful for research and software development, either for a single-constellation system, or using a separate RF front end.
The worldwide Compass signal, which is on a GPS/Galileo signal format in both carrier frequency and in code length and rate, will be directly compatible, but is not expected to be fully available until 2020.
The city environment testing will be repeated as the Galileo constellation becomes available. With 32 channels, an 11/11/10 split (GPS/Galileo/GLONASS) may be used when all three constellations are full, but for the next few years 14/8/10 satisfies the all-in-view requirements.
Conclusions
The multi-constellation receiver can include GLONASS FDMA at minimal increased cost, and with its 32 channels tracking up to 22 satellites in a benign environment, even in the harshest city environment sufficient satellites are seen for 100 percent availability and acceptable accuracy. 10–16 satellites were generally seen in the urban canyon tests. The multiplicity of measurements allows RAIM and FDE algorithms to be far more effective in eliminating badly reflected signals, and also minimizes the geometric effects of remaining distortion on the signals retained.
Acknowledgments
ST GPS products, chipsets, and software, baseband and RF are developed by a distributed team in Bristol, UK (system R&D, software R&D); Milan, Italy (silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); and Noida, India (verification and FPGA). The contribution of all these teams to both product ranges is gratefully acknowledged.
Philip Mattos received a master’s degree in electronic engineering from Cambridge University, UK, a master’s in telecoms and computer science from Essex University, and an external Ph.D. for his GPS work from Bristol University. He was appointed a visiting professor at the University of Westminster. Since 1989 he has worked exclusively on GPS implementations and associated RF front ends, currently focusing on system-level integrations of GPS, on the Galileo system, and leading the STMicroelectronics team on L1C and Compass implementation, and the creation of generic hardware to handle future unknown systems.
The long-awaited signal interface control document (ICD) for China’s growing GNSS will appear this month, according to representatives of the system who spoke in a “Compass: Progress, Status, and Future Outlook” workshop as part of ION GNSS and the CGSIC meetings in Portland in September.
The ICD has been rumored to be available previously to receiver manufacturers within China, creating some disgruntlement among companies outside the country. One of the workshop panelists affirmed that GPS/Compass chips and receivers are being actively developed by many Chinese manufacturers and research institutes.
The ICD announcement came among many valuable pieces of information presented during the pre-ION workshop, sponsored by the International Association of Chinese Professionals in Global Positioning Systems and chaired by Jade Morton, professor of electrical and computer engineering at Miami University, Ohio.
Xiancheng Ding of the Beidou Program Office described Compass as a demo system in transition to an operating navigation system. Two more satellites will launch in 2011, making a total of five new space vehicles this year,as part of a total “simple navigational system” of nine satellites that has been built up, and what is termed a test system over the Asia-Pacific region, to be complete by the end of the year.
Five more satellites will rise into orbit in 2012, and the system will gradually extend its coverage and improve its performance. Compass will start official regional service by the end of 2012, meeting user requirements in the Asia-Pacific region.
ICD document v1.0 will be published in 2011, and probably in the month of October. It will be available for international download on the Compass website (as yet without an English version).
There was some disagreement among panelists as to the final targeted number of satellites in the system: either 30, or 35. Subsequent comments indicated that much of the structure may still be under discussion. The impression given was very much of a dynamic system in formation and growing rapidly.
In a presentation on “Preliminary Results of GPS/Compass Integrated Positioning and Navigation,” Uanxi Yang of China’s National Administration of GNSS and Applications reported integrated navigation with a Unicore UB 240 Compass/GPS receiver with up to 9-centimeter accuracy, and also mentioned a Shanghai Huace Compass/GPS receiver. Some systematic errors in Compass positioning were reported, and attributed to the sparse satellite distribution currently.
Yang concluded with the exhortation, “Reasonable Wishes for Compass!” emphasizing the delegation’s desire to continue working diligently on, but with realistic expectations for, the new system.
Orbit Roundup
In other satellite news and debuts anticipated around the world:
GPS. Back-channel reports say the cesium clock aboard SVN-63, the second IIF satellite, is not functioning properly, and that this is at least one reason why the satellite, turned over to 2SOPS control on August 19, has not been set healthy to users.
[Correction: The September issue and env-gpsworld-integration.kinsta.cloud mistakenly reported that SVN-63 had been set operational on August 23. This is not the case. As of September 29, the satellite is still not healthy to users.]
After repeated attempts to get the clock working, operators are ready to switch to a rubidium clock onboard, and may already have done so.
GLONASS. The launch of GLONASS-M No. 42 from Plesetsk is scheduled for October 1. GLONASS-M Nos. 43, 44, 45 from Baikonur may occur as early as November 2. GLONASS-M No. 46 from Plesetsk is now scheduled for November 22. The launch of the next-generation GLONASS-K1 No. 12 from Plesetsk will likely slip to 2012.
The K1 satellites will not be set healthy, but held in reserve only. The remaining M-generation vehicles launching this year will fill up the 24 almanac slots. GLONASS will have plenty of satellites held in reserve.
Luch-5A, a Russian geostationary communications satellite that includes an SBAS payload, will launch on December 10 from Baikonur.
FCC Calls for More Testing on LightSquared Interference
The U.S. Federal Communications Commission (FCC)issued a Public Notice on September 14 stating that additional testing is necessary to ensure that LightSquared’s broadband network will not interfere with GPS.
The notice states: “Following extensive comments received as a result of the technical working group process required by the International Bureau’s Order and Authorization dated January 26, 2011, the Federal Communications Commission, in consultation with NTIA, has determined that additional targeted testing is needed to ensure that any potential commercial terrestrial services offered by LightSquared will not cause harmful interference to GPS operations….
“For more than three months, the technical working group, comprised of more than 120 participants including representatives from the Department of Defense, Department of Transportation and other federal agencies, the GPS community, various telecommunications companies and LightSquared, conducted an extensive set of tests, and LightSquared submitted a final report on June 30, 2011. The technical working group effort identified potential for harmful interference from LightSquared’s originally proposed deployment based on operation of terrestrial transmitters in both the upper and lower 10 MHz portions of its spectrum. The FCC issued a public notice on June 30, 2011, seeking comment on the report.
“LightSquared submitted proposed mitigation techniques to remedy the interference to GPS simultaneously with the technical working group final report. Notably, LightSquared proposed to revise its planned deployment to operate terrestrial transmitters only in the lower 10 MHz of its spectrum. The results thus far from the testing using the lower 10 MHz showed significant improvement compared to tests of the upper 10 MHz, although there continue to be interference concerns, e.g., with certain types of high precision GPS receivers, including devices used in national security and aviation applications. Additional tests are therefore necessary.”
Galileo Counts Down to October 20 for First Validation Satellites
The first flight of a Russian rocket, Soyuz, from Europe’s spaceport in French Guiana will carry the first two satellites of Europe’s Galileo navigation system into orbit on October 20, and the European Space Agency is reporting on the preparations.
The Soyuz launcher will be rolled out horizontally to the launch pad on October 14 and raised into its vertical launch position. The upper composite, comprising the Fregat upper stage, payload and fairing, will then be hoisted on top of Soyuz.
The two Galileo satellites arrived from the Rome facility of Thales Alenia Space Italy, also in mid-September. In 2012, a second pair of satellites will join them in orbit, with the task of proving the design of the Galileo system in advance of the other 26 satellites. The four satellites, built by a consortium led by EADS Astrium Germany, will form the operational nucleus of the full Galileo satnav constellation. They combine reportedly the best atomic clock ever flown for navigation — accurate to one second in three million years — with a powerful transmitter to broadcast precise navigation data worldwide.
The first Soyuz to rocket up from a port outside Baikonur in Kazakhstan or Plesetsk in Russia, the launch will take place from a new facility 13 kilometers northwest of the Ariane 5 launch site. French Guiana is much closer to the Equator than other launch possibilities, so each Galileo effort will benefit from the Earth’s spin, increasing the maximum payload into geostationary transfer orbit from 1.7 tons to 3 tons.
China’s GNSS, Compass or Beidou, intends to publish its signal interface control document (ICD) in October. Representatives of the system made an unprecedented showing at ION GNSS in Portland, and referred frankly to “internal deliberations” that may be at the root of much of the public uncertainty about the system’s planned structure and timeline. Meanwhile, representatives of other navigation satellite systems also delivered updates on their status and plans. Everyone is concerned about LightSquared interference, but everyone continues to move forward.
This month’s column is a two-parter: a guest appearance by Len Jacobson, editorial advisory board member for GPS World magazine and president of Global Systems and Marketing Inc. Len writes on the “Harmonizing GNSS” aspect, the briefings by all systems and their efforts to achieve compatibility and interoperability. Then I’ll return with an account of the Compass panel that formed part of the CGSIC meeting immediately preceeding ION.
Harmonizing GNSS
by Len Jacobson
Representatives of the International Committee on GNSS (ICG) participated in briefings and a panel discussion at the ION-GNSS Conference in Portland on Thursday, Sept. 22, 2011. The ICG is a committee formed under the auspices of the United Nations Office of Outer Space Affairs. The purpose of the panel was to acquaint the audience with the activities of the ICG and to allow the global and regional satellite navigation systems providers to describe their policies and efforts with regard to interoperability and compatibility among the various GNSS and to advise how multi-GNSS services could be harmonized.
Rick Hamilton from the U.S. Coast Guard Navigation Center organized the panel, and Jeffrey Auerbach, from the same U.S. Department of State (DOS) office as the U.S. ICG representative Dave Turner, moderated it.
The first speaker was Sharafat Gadimova, from the ICG Executive Secretariat. She described the functions and make-up of the ICG and suggested visiting their web site www.icgsecretariat.org for further information. The next meeting of the ICG is scheduled for December 4–9, 2012 in China.
David Turner, the deputy director of the Office of Space and Advanced Technology in the DOS, reiterated the President’s 2010 Space Policy and in particular the addition emphasizing international cooperation and more use of foreign systems by the U.S. government to enhance GPS. Turner co-chairs Working Group (WG)-A on compatibility and interoperability. He discussed a Multi-GNSS Monitoring Network using new and existing GNSS monitoring receivers and networks. He stated that the various GNSS geodetic and timing references can be found on the ICG web site.
Dr. Sergey Revnivykh, deputy director-general, GLONASS Information and Analysis Center, stated his desire that all GNSS be considered equal. In this sense, Russian policy differs from U.S. policy, which considers GPS as the premier GNSS. Dr. Revnivykh discussed the GLONASS System of Differential Correction and Monitoring (SCDM), the Russian version of WAAS. It will augment both GLONASS and GPS. He had to leave after his presentation so was not able to participate in the ensuing panel discussion.
Independently, we have learned from GLONASS communications that the launch of GLONASS-M No. 42 from Plesetsk is scheduled to take place on October 1 at 20:19 UTC. The launch of GLONASS-M Nos. 43, 44, 45 from Baikonur may occur as early as November 2. The launch of GLONASS-M No. 46 from Plesetsk is now scheduled for November 22. The launch of the next-generation GLONASS-K1 No. 12 from Plesetsk will likely slip to 2012. Additionally, Luch-5A, a Russian geostationary communications satellite that includes an SBAS payload, will launch together with Amos-5, a Russian-built Israeli communications satellite, on December 10 from Baikonur.
Next we heard a short briefing by Xavier Maufroid from the Galileo Implementation office of the European Commission in Belgium. He stressed compatibility with all services, and then interoperability. He stated that the European Union (EU) is concerned about LightSquared (LS) because LS transmissions could affect Galileo reception in the United States and also could expand to provide a similar disruption in Europe if they were to expand into that area. And if not LS, then someone else could attempt a similar broadband service over Europe with the same potential to interfere with Galileo. He later added that 7 billion euros are budgeted for Galileo between 2014 and 2021.
From the Chinese Electronics Technology Group came Dr. Xiancheng Ding, the deputy director-general. He described Beidou (Compass) as having nine satellites with five more to be launched in 2012. This will provide regional service by the end of 2012, including over Australia and New Zealand. Beidou has a communications capability for short messaging, which is needed in rural China.
Dr. Ding said the Beidou signal interface control document (ICD) would be released soon. Other sources indicate it to be as early as October 2011. He indicated that Beidou is fully funded for phase 2 (regional system) and will probably be funded for phase 3 (global system).
The final briefer was Dr. Satoshi Kogure from the Japan Space Ageny. He gave a QZSS update similar to one given in other ION GNSS sessions.
During the panel interchange and answers to questions from the audience, various combinations of signals were discussed as needing to be compatible. That is, to not interfere in same frequency band and to comply with International Telecommunications Union (ITU) regulations. Specific signal pairs mentioned in this context included: GPS L1 and L5 with Galileo; Compass and future GLONASS CDMA; the QZSS LEX with Galileo; and others.
A WG-A workshop proposed jointly to ICG to study the potential noise impact of too many satellites. By 2020, more than 100 satellites are expected to be transmitting the myriad of GNSS signals, with up to 35 in view at any one place. This could cause mutual interference, which in turn could cause degradation in the levels of service of the various GNSS.
Dr. Kogure described a Multiple GNSS demo campaign sponsored in part by the Japanese Space Agency consisting of tens of receivers monitoring GNSS signals over Asia and the Western Pacific. For multi-GNSS testing there is better availability in these region as there are initially more GNSS signals in view. This experiment is a prototype of a multi-GNSS monitoring network with 20 QZSS receivers by March of 2012 and 40 by a year later. China will supply Beidou receivers to Japan for the multi-GNSS Monitoring Network in cooperation with the ICG. There will be a workshop on this topic in November in Korea.
There is still an issue between China and the EU on frequency compatibility for authorized services, but Dr. Xiancheng said a technical solution is known. Negotiations are still ongoing.
All members of the panel were cognizant of the LS problem and are focused on providing interference detection and mitigation for their GNNS.
Compass ICD in October
The long-awaited signal interface control document (ICD) for China’s growing GNSS will appear this month, according to representatives of the system who spoke in a “Compass: Progress, Status, and Future Outlook” workshop as part of ION GNSS and the CGSIC meetings in Portland in September.
The ICD has been rumored to be available previously to receiver manufacturers within China, creating some disgruntlement among companies outside the country. One of the workshop panelists affirmed that GPS/Compass chips and receivers are being actively developed by many Chinese manufacturers and research institutes.
The ICD announcement came among many valuable pieces of information presented during the pre-ION workshop, sponsored by the International Association of Chinese Professionals in Global Positioning Systems. The workshop was chaired by Jade Morton, professor of electrical and computer engineering at Miami University, Ohio.
Dr. Xiancheng Ding of the Beidou Program Office described Compass as a demo system in transition to an operating navigation system. Two more satellites will launch in 2011, making a total of five new space vehicles this year,as part of a total “simple navigational system” of nine satellites that has been built up, and what is termed a “test system” over the Asia-Pacific region, to be complete by the end of the year.
Five more satellites will rise into orbit in 2012, and the system will graduallly extend its coverage and improve its performance. Compass will start official regional service by the end of 2012, meeting user requirements in the Asia-Pacific region.
ICD document v1.0 will be published in 2011, and probably in the month of October. It will be available for international download on the Compass website, www.beidou.gov.cn (as yet without an English version), also at www.compass.gov.cn.
There was some disagreement among panelists as to the final targeted number of satellites in the system: either 30, or 35. Subsequent comments indicated that much of the structure may still be under discussion. The impression given was very much of a dynamic system in formation and growing rapidly.
In a presentation on “preliminary Results of GPS/Compass Integrated Positioning and Navigation,” Dr. Uanxi Yang of China’s National Administration of GNSS and Applications reported integrated navigation with a Unicore UB 240 Compass/GPS receiver, and also mentioned a Shanghai Huace Compass/GPS receiver. Some systematic errors in Compass positioning were reported, and attributed to the sparse satellite distribution currently.
Dr. Yang concluded with the exhortation, “Reasonable Wishes for Compass!” emphasizing the desire of the delegation to continue working hard on, but with realistic expectations for, the new system.
Recent events, some of them summarized here, may appear to have dealt setbacks to LightSquared, the boundless opportunist of wireless broadband that just happens to interfere with GPS. But the company has not run out of moves yet. Would you, if you had $20 billion at stake? The latest gambit, led by lawyers and cloaked in jargon, appears to be an end-run around the U.S. government to appeal to the International Telecommunications Union, which has ultimate and international authority over spectrum. Watch out, GLONASS and Galileo — and U.S. troops operating in foreign theaters.
GPS World has received copies of three “fact sheets” authored by two lawyers and a strategic consultant. The documents are addressed to ITU-R WP 4C, the International Telecommunications Union Working Party that handles mobile satellite services (MSS) and radio determination satellite service (RDSS spectrum) and orbits. One document is titled “ Compatibility between Complimentary Ground Componenet in the 1525–1559 Mhz and 1626.5–1660.5 Mhz Bands and Other Service.” All three documents appear to be cover sheets for longer treatises, and their language and citations are not entirely clear to me, as my legal and regulatory background leaves something to be desired.
However, they announce their purpose as “to modify and refine the example methodology to calculate aeronautical mobile satellite (route) service spectrum requirements,” and “to address ongoing Integrated Mobile Satellite Service Complimentary Ground Component compatibility matters,” and finally “to update the Integrated Mobile Satellite Service Complimentary Ground Component technical characteristics based upon the most recent information regarding CGC deployment plans in this frequency band.”
One source familiar with the documents, who did not wish to be named, commented that “One should interpret what LightSquared is doing with ITU as a bellwether indication of intent to use the whole band at the full authorized power, no matter how they spin ‘protect GPS’ in their press releases.
“At first blush, the filings look innocuous; let me assure you, they are not. This is the first salvo. Watch what they do, much more than what they say.
“These are fact sheets intended to inform the U.S. government that LightSquared intends to develop papers with the intent to get the U.S. government to approve the papers to be sent to the ITU WP-4C, the Working Party that handles MSS and RDSS spectrum & orbits. The ultimate goal is to work internationally to allow LightSquared to allow ancillary terrestrial component (ATC) broadcast globally.”
In other developments, going now in reverse chronological order, from most recent to early June:
Congressional Activity
On June 23, the U.S. House of RepresentativesAppropriations Committee approved the fiscal year 2012 Financial Services and General Government Appropriations bill. One amendment to the bill prohibits funding for the Federal Communications Commission (FCC) to remove conditions on or permit certain commercial broadband operations until the FCC has resolved concerns of harmful interference by these operations on GPS devices. The amendment was adopted on a voice vote. More details here.
Previously, on May 27, the U.S. House of Representatives passed a bill stating that the FCC shall not provide final authorization for LightSquared operations until Defense Department concerns about GPS interference have been resolved. The bill then went to the U.S. Senate for its action.
The House actions and a letter to the FCC signed by 32 U.S. senators may presage a showdown over the issue between Congress and the president, who has promised increased broadband access. A 4G wireless network providing this access could be facilitated by LightSquared sales of service via its tower transmitters to wireless carriers. LightSquared has already signed a $20 billion, 15-year deal with Sprint.
Money Talks
A report on “The Economic Benefits of Commercial GPS Use in the United States and the Costs of Potential Disruption” was presented by during a June 21 webinar sponsored by the Coalition to Save Our GPS. The report estimates that “the direct economic benefits of GPS technology on commercial GPS users are . . . over $67.6 billion per year in the United States,” but also that ““the direct economic costs of full GPS disruption to commercial GPS users and GPS manufacturers are estimated to be $96 billion per year in the United States.” Final Report Withheld
At the last minute of a June 15 deadline for the final Working Group report on interference, LightSquared asked for a two-week extension. Federal regulators granted the request, and the final report is now due on July 1.
A spokesperson for the Coalition to Save Our GPS revealed that “The Working Group results show devastating interference to GPS and no proven method of mitigation. Delay will not change these results. These results are the same results the FCC had had before it granted the waiver.”
Some Solution. Three days after requesting the delay, LightSquared announced it had solved the problem, by proposing to broadcast only from the lower end of its permitted spectrum band. GPS experts countered that this would still disable the functioning of high-precision receivers.
“This comes out of the blue, without the knowledge, agreement or consensus of the industry group studying the problem,” riposted the Coalition to Save Our GPS. “That may well be because virtually nothing has actually changed in this “new” proposal relative to what LIghtSquared pledged at the outset of testing. The power levels don’t change. Nor do the frequencies. In fact, the only thing that has changed is the order in which the channels within the band adjacent to GPS would be deployed.
“LightSquared’s announced “solution” has two components:
“1. LightSquared acknowledges that “[e]arly test results indicated that one of LightSquared’s 10MHz blocks of frequencies poses interference to many GPS receivers.” LightSquared states that for “the next several years” it would not operate in this band – which is directly adjacent to GPS spectrum and is referred to as the “upper MSS band.” During this period, LightSquared would commence operations in a second 10 MHz block of the MSS band , referred to as the “lower MSS band,” slightly further away from GPS.
“2. According to the proposal ‘LightSquared will modify its FCC license to reduce the maximum authorized power of its base-station transmitters by over 50 percent. This action will limit LightSquared to the power it was authorized to use in 2005.’
“This so-called solution is not a solution in any shape, form or fashion,” continues the Coalition. “This is not a move to an alternative frequency band. Nor is it a reduction in power relative to what has been tested from the beginning. The “solution” would cause massive disruption to many critical U.S. economic sectors, initially including public sector users of high precision GPS, later followed – af
ter “the next several years” — by other GPS users. The only real solution to the LightSquared interference problem is to move out of the MSS band altogether."
The Air Transport Association and the Aircraft Owners & Pilots Association told Congress that the only acceptable mitigation is for LightSquared’s operations to be moved outside of the L-band and away from GPS. “With so much of the early evidence showing that LightSquared’s proposed network would potentially endanger nearly every flight operating in U.S. airspace, it seems evident that no further development of this system can be allowed.”
Military Report Calls for FCC Retreat
The National PNT Engineering Forum concluded after testing classified and GPS receivers under LightSquared terrestrial transmission conditions: “Significant concerns remain that operation of an ATC integrated service as originally envisioned by the FCC cannot successfully coexist with GPS.”
The NPEF report calls for rescinding the FCC waiver for LightSquared terrestrial transmissions, conducting more thorough studies on impacts, and revisiting the 2003–2010 authorizations. The group tested a variety of military receivers under classified categorization, also known as “government receivers.” Rebuttals Distort Record
Claims by LightSquared’s Carlisle and FCC chair Julius Genachowski, that the GPS industry knew long ago about LightSquared’s plan for powerful terrestrial transmitters, contradict the truth. Examination of FCC filings show that the GPS industry knew about and agreed to a plan by a previous ownership of the company, for a different purpose, with a different business concept, and employing a completely different technological approach, one that would not have harmed GPS transmissions and disabled GPS users the way the current LightSquared plan does.
The terrestrial broadband operations first unveiled in November 2010 cannot be described as ancillary to the purpose for which Lightsquared predecessors Motient, MSV, and SkyTerra received their spectrum and licenses — that is, to provide a service that was primarily a mobile satellite service. The November letter to the FCC described a new business model that turns the original concept on its head. LightSquared for the first time revealed plans to build a “nationwide network of 40,000 terrestrial base stations,” and stated that “the capacity of its fully deployed terrestrial network across all base stations will be tens of thousands of times the capacity of either of [its] satellites.”
The deviations from established policy required to accommodate LightSquared’s new business model are not technicalities. They represent a fundamental change to a complex and interrelated set of rules that were carefully designed to protect GPS users from interference.
The predecessor companies had to protect their own primary satellite operations from interference. The protection that their own satellite operations required was also sufficient — at that time — to protect GPS receivers. The terrestrial network and powerful signal LightSquared now proposes bear no resemblance to the operations the FCC authorized in 2003.
At its June 9–10 meeting, the National Space-Based Positioning, Navigation and Timing (PNT) Advisory Board found that GPS services cannot be assured if the LightSquared plan is approved, and that the only viable option for continued availability of GPS as well as new wireless broadband is to find another spectrum for LightSquared not adjacent to the GPS frequency.
The formal recommendation reads: “The provision of GPS services cannot be assured if the LightSquared proposal for satellite and terrestrial broadband provision using the MSS L-Band receives final approval.
“The only reasonable and viable option to continue ubiquitous availability of GPS and the provision of a new 4G wireless broadband capability would be for the FCC to assign an alternate frequency spectrum to LightSquared that has little or no probability of affecting the delivery or utilization of GPS/GNSS services.”
During its meeting, the Advisory Board heard directly from one representative of LightSquared, the company’s executive vice president, regulatory affairs and public policy, Jeff Carlisle, and from Jim Kirkland, vice president and general counsel, Trimble Navigation, speaking on behalf of the Save Our GPS Coalition. "Without knowing otherwise," commented one observer, "one might have thought they were talking about two different sets of FCC actions. Their interpretations of FCC actions were completely orthogonal to each other."
During the discussion, one Advisory Board member, a former governor of the state of Wyoming, told presenter Jeff Carlisle of LightSquared, “Your definition of mitigation seems more tied to a legal argument than a common-sense argument.”
Other speakers on the LightSquared/GPS panel included Dean Bunce, co-chair of the National PNT Engineering Forum (NPEF), which has had responsibility for testing various classified GPS receivers under LightSquared conditions; and Robert Frazier of the Federal Aviation Administration (FAA) Spectrum Planning and International Office.
Another observer at the Advisory Board meeting opined of the LightSquared presentation and subsequent replies to questions from board members, “I’ve seen weasels before, but not like this. Misinformation, mis-statements, reversals and take-backs, outright lies.”
Tests Slam Hi-Precision Receivers
Data from Las Vegas field tests show that wide-bandwidth, high-precision GPS receivers started feeling the effects of the LightSquared transmission about 1,800 meters from the tower. Medium-bandwidth high-precision GPS receivers started feeling the effects of the LightSquared transmission at about 1,200 meters from the tower. In each case, there was about a 200-meter buffer from when the GPS receivers started to feel the effects of the LightSquared transmission to the GPS receiver being jammed, at 1,600 meters and 1,000 meters respectively. For further details, see this article.
GPS World has received further details of the tests but not an authorization to publish them yet.
Deere & Company, a major provider of precision agriculture equipment and services, notified the FCC on May 26 of substantial interference with its GPS receivers by the LightSquared signal. Deere receivers registered impact of and interference by the LightSquared signal as far away as 22 miles from a transmitter. Further, the company has found no practicable technical solution to the problem.
The recent broadcast of the first CDMA signal from the new GLONASS-K satellite culminates a long series of events that began in 1989. A key participant gives a first-hand account of the history of many meetings, formal and informal, that created true interoperability between the two major satellite systems, giving users a modern GNSS in action.
October 18, 1989, the Queen Elizabeth Auditorium in London, around 8:30 am. Unknown to me, two 60-minute periods were about to imprint themselves indelibly on my memory.
I walked up the stairs to the exhibition booth of my company, Ashtech, at The Royal Institute of Navigation conference. My good friend, the late Ann Beatty, met me and asked, “Any news from home?”
I thought it was just a casual customary question, and replied: “Thanks, all OK.” She had a strange look on her face. She continued: “Are all your family really OK?” I replied again: “Thanks, all good.” She then realized that I had no clue about the cataclysmic event that had hit the San Francisco Bay area. She abruptly said, “Don’t you know? The big one came! The big earthquake hit San Francisco!”
Californians know the rumors that when The Big One comes, Nevada will have ocean frontage. Now she was telling me that The Big One came! I rushed to the phone, and the recorded AT&T message said, “All lines to your area are out of service.” It took me another hour to find out that this was not yet The Big One, and that my family was safe. I will never forget these 60 minutes of my life. Never!
Nor will I ever forget the events of the next 60 minutes.
After the stress had settled a bit, a delegation from the Russian Space Agency visited our booth. First they expressed their sympathy regarding the earthquake. Then we discussed GPS technology and its similarities with GLONASS. Both systems were fairly new then, although GPS had started first, with a Block I launch in 1978, followed by GLONASS with a launch in 1982. At the time we met in London, GPS was flying 12 satellites, and GLONASS also had 12 in orbit.
The Russian delegation visited all GPS manufacturers’ booths in the exhibition hall and then gathered in the coffee area for their private discussions. A few hours before the conference closed, they returned to our booth and said, “We want to combine GPS and GLONASS, and you are our first choice.” Simply put, I was fascinated and excited.
After working out visa and travel details, four months later I arrived in Moscow in the cold days of February 1990. It was still the Soviet Union.
I had grown up in Iran where the U.S.S.R. was our neighbor to the north. Remembering the global political landscape of my childhood days, I felt both fascination and fear as my airplane landed at Moscow airport.
Upon meeting the people who greeted me at the airport, my fears disappeared, and my fascination grew stronger.
Our first formal meeting took place in the Institute of Space Device Engineering (ISDE), a division of the Russian Space Agency that was responsible for the GLONASS program. The opening photo shows me with the late Dr. Nikolay Yemelianovich Ivanov, director of the GLONASS program, at that first meeting.
I want to focus a bit on the GLONASS team and applaud them for their efforts. What makes the GLONASS team special is that they worked under much harder political and financial conditions than the GPS or Galileo teams. But still they were able to make the project successful. The Soviet Union and later Russia went through huge political, economic, social, and geographical revolutions, but the GLONASS team managed to keep the satellite navigation program alive and successful.
Galileo’s management, while enjoying much more stability and financial luxury, can certainly appreciate and understand the significance of what the GLONASS team accomplished. Galileo also benefitted from the European integration of 27 countries, while the Soviet Union disintegrated into 15 separate nations.
Despite all their heroic work, individuals on the GLONASS team have received almost no international recognition. At home they went unnoticed, due to their political situations. For example, the highest international recognition that Dr. Ivanov received was that he became a member of the GPS World Advisory Board, which I facilitated. In this article, I want to salute some members that I know and at least keep their names and photos recorded in the GPS World archives.
In the first meeting, everyone recognized and emphasized the great potential of combining GPS and GLONASS for a variety of applications. I became more assured of the deep desires of my hosts to make this happen. They had prepared detailed charts and plans, especially for high-precision applications. They also gave me the GLONASS Interface Control Document (ICD) for the first time.
We signed a cooperation protocol and agreed to explore technical details in our next meeting, which occurred a few months later. There I began to know Dr. Stanislav “Stas” Ulianovich Sila-Navitsky, at that time the chief scientist of Dr. Ivanov’s team. Later he became my vice president in three companies that I founded. He also became my best friend of 19 years, before he passed away on May 7, 2010.
We had several meetings in Moscow and one in Paris in the headquarters of our partner SAGEM.
I have wonderful memories of all the meetings. One meeting in Paris included General Leonid Ivanovich Gusev, the head of ISDE. One evening Stas called my hotel room and asked me to cancel our dinner at a famous French restaurant and instead join them for a “real dinner.” Apparently General Gusev was tired of French food! The real dinner took place in the General’s hotel room, and the menu consisted of dark Russian bread, Russian kielbasa sausage, Russian seledka herring, and an abundance of Russian vodka.
Our first announcement of combining GPS and GLONASS was published in GPS World magazine, in only its second issue, March/April 1990. That year we had a poster banner in our Institute of Navigation exhibition, showing the American flag and the Soviet flag (hammer and sickle) next to each other. My very good friend, Colonel Gaylord Green, the second director of the GPS Joint Program Office, refused to have his picture taken with me in front of that banner. Instead, we stood over to another side of the booth for his photo.
A few months after the Paris meeting, the political process known as perestroika began and caused the Soviet Union to end. Life became extremely difficult for Russians.
I called Stas to discuss the situation. We concluded that we had no choice but to continue the plan on our own if we wanted to combine GPS and GLONASS. I went back to Moscow several times, and in February 1992 officially opened the Moscow office of Ashtech. This office is still operational in Moscow with about 10 percent of the original team. It is now in the process of being purchased by Trimble Navigation. What a turn of events!
In 1996 we introduced the first combined GPS and GLONASS receiver; the product announcement appeared in GPS World, July 1996
Back home in the United States, the situation was different. Supporting GLONASS was an unpatriotic act. The most prominent figures of GPS teased me for wasting my time with GLONASS. The news favored their arguments: the Russian economy was going downhill. In September 1998, the Russian ruble collapsed more than 300 percent within a week. Banks closed. Even Coca Cola was not able to pay its employees in Russia because of bank closures. Many western companies left Russia. During that period, I intentionally stayed longer times in Moscow and managed to pay our employees without a day of delay. Furthermore, a more than three-fold rate change in favor of the dollar made our employees relatively rich, because their salaries were based on the U.S. dollar.
I remained confident that GLONASS would succeed because I had seen the enthusiasm and dedication of GLONASS management and engineers.
My Ashtech partners wanted to take the company public to recoup their investments. They thought Wall Street would negatively view GLONASS and the Russian connection. So my aspiration did not match theirs, and I started Javad Positioning System (JPS) in 1996. About 90 percent of the staff engineers followed me to JPS.
One of John Scully’s vice presidents did to Ashtech what Scully did to Apple. Meanwhile JPS became very successful, as Apple did when Steve Jobs returned.
Subsequent to another event and termination of some obligations and commitments, I started JAVAD GNSS in June 2007. Almost all of the key people followed me again. Our current team has a history of working together for close to 20 years.
In JAVAD GNSS we raised the bar of GPS/GLONASS integration to a higher level and focused in two new directions. The first was to eliminate the problem of GLONASS inter-channel biases, which is inherent to the GLONASS frequency-division multiple access (FDMA) signal structure. The second was to support the opinion of GLONASS engineers who were pushing for a new code-division multiple access (CDMA) signal for GLONASS, similar to the GPS signal.
We resolved the GLONASS inter-channel biases issue around 2009 and announced, “Our GLONASS is as good as GPS.”
On the second front, we worked with the top managements of ISDE and the Information Analysis Center (IAC) of the Russian Space Center to demonstrate the advantages of CDMA for high-precision applications.
Some years ago, Stas had confided in me that the issue of CDMA was nothing new, and had been extensively deliberated at all levels of various GLONASS organizations during the early design phase of the system. The result of all these discussions was that engineers and technical people favored CDMA, but the higher management, mostly influenced by the military organizations, held out for FDMA. The reason for favoring FDMA is still a secret, though some believe that they just wanted to be different from GPS and did not see much advantage in CDMA. Some also believed FDMA gave better jamming protection.
Of course in those very early days, no one imagined using GPS or GLONASS for high-precision applications, and as such truly there was not much difference between CDMA and FDMA. Much later, the notion of using carrier phase of GPS and GLONASS signals for high-precision applications was discovered, and then the advantages of CDMA became relevant, as Dr. Ivanov also hinted in our first meeting.
After we combined GPS and GLONASS, and as a lot of our worldwide users began comparing the two systems, the issue of CDMA versus FDMA again came up for discussion among the GLONASS authorities.
More recently, since 2007, we had several meetings in the offices of ISDE in Moscow, in IAC in Korolev (the Russian Space City), and several in our JAVAD GNSS office in Moscow. Most importantly, we had several meetings in my Moscow apartment, enhanced by Russian vodka and the best Armenian cognac, courtesy of Sergey Revnivykh, head of IAC. All meetings were open and candid, discussing and demonstrating the advantages of CDMA, in support of the ISDE engineers who were reluctant to express their opinion above certain levels.
I also met with the head of the Russian Space Agency, Dr. Anatoly Nikolayevich Perminov, who personally supported and sponsored me in obtaining an extended Russian residency visa. Let me also express my appreciation for receiving the Medal of Honor from the Russian Cosmonauts Federation, along with the official astronaut watch. I don’t understand the reason for receiving a Kalashnikov AK-47 semi-automatic rifle from ISDE for my birthday. I wonder how I can transport it home!
General Anatoly Shilov (deputy director of the Russian Space Center), Dr. Vicheslav Dvorkin (GLONASS deputy general designer), Sergey Revnivykh, Viktor Kosenko (first deputy of chief GLONASS designer) and Sergey Karutin (GLONASS senior scientist) are the new generation of GLONASS leaders who deserve credit for supporting CDMA on GLONASS. Recently, a new GLONASS-K sat-ellite was launched, transmitting an experimental CDMA signal in addition to the legacy signals. Almost immediately, we announced tracking of the new GLONASS-K satellite and its new L3 signal details, hours after it started transmitting. See GPS World archives and our website for details of this signal which seems, in all aspects, as good as GPS.
Another new issue of significant international concern was a new frequency for GLONASS. This issue was more political than technical, and is discussed under the umbrella of interoperability.
In the early days of my frequent travels to Russia, the KGB probably suspected that I was a CIA agent — and the CIA probably suspected that I was a KGB agent! I would not be surprised if both the CIA and KGB monitored every bit of my travels and activities. After some years, the San Francisco airport authorities stopped interrogating me for my activities in Russia any time I came back home. Perhaps because of their deep investigations, I earned the trust and friendship of both sides, and their confidence that I had nothing in mind other than helping to integrate GPS and GLONASS. I was an unofficial member and friend of both U.S. and Russian delegations during the so-called interoperability discussions since 2007, which sometimes touched on the CDMA issue as well.
Some of the most fruitful and friendly discussions between the U.S. and Russian delegations occurred in my apartment in Moscow, after their official meetings. Ken Hodgkins of U.S. State Department; Mike Shaw, director of the National Space-Based Positioning, Navigation, and Timing Coordination Office; David Turner, director of the Center for Space Policy & Strategy; Scott Feairheller of the U.S. Air Force; and Tom Stansell, consultant to the GPS Wing were some of my honored guests.
The new GLONASS frequency discussions are still in progress, and I am proud to host and support both sides the best that I can. Sometimes it is fun to observe that discussions resemble poker games where hands are known to all sides, but players still try to bluff each other! Let’s leave it at that for now.
In May of this year, I had a conversation with General Anatoly Shilov, now second-in-command of the Russian Space Agency, reporting to the first deputy of the minister of defense, General Vladimir Popovkin, who recently replaced Dr. Perminov as head of the Russian Space Center. This is an indication of increased attention and support from the Russian government to its GLONASS program. In our conversation, General Shilov was enthusiastic and optimistic that the GLONASS program will move forward faster.
GLONASS has proven to be a real and reliable complement to GPS. If it were not for the failure of the launch of three GLONASS satellites in December 2010, its constellation would be complete and fully, globally operational today. It will happen soon. Sergey Revnivykh estimates that currently the system has 99.8 percent global coverage.
Today, a truly reliable and fast RTK is not possible without combining GPS and GLONASS satellites.
The most recent testimony to the success of GLONASS comes from the long-time GLONASS opponents who once criticized me for supporting the system. Recently they had to pay a lot of money to acquire the first company that I founded in Moscow, which they believed would never survive.
This year at JAVAD GNSS, I and most of my original employees and GLONASS designers are celebrating our 20th year in Russia, and we are working harder to make the integration of GPS and GLONASS even better.
On May 7, 2010, Stas lost to leukemia. He was not present to witness the successful introduction of our TRIUMPH-VS receivers. My refrigerators in Moscow are full of medicines that he brought for me any time I had a little cold. I miss him a lot, and our team is dedicated to following the path that Stas loved so much.
I want to briefly summarize the current status and the future of GPS and GLONASS from the users’ point of view.
GLONASS now has 24 satellites transmitting FDMA signals in two frequency bands. The failure in the last launch to deploy three more satellites delayed completion of the constellation to the end of 2011. The good thing about GLONASS is that both of its L1 and L2 signals are not encrypted and give better data than GPS P1 and P2 that are encrypted.
GLONASS is considering a plan to add CDMA signals to all satellites and not suffer from inter-channel biases. But it will take about 10 years for this plan to become complete for public use, even if the plan is approved and followed. At JAVAD GNSS, we have already mitigated the effect of GLONASS inter-channel biases to the accuracy of better than 0.2 millimeters. We made GLONASS FDMA the same as GPS CDMA by adding some innovations (patent pending) and enhanced algorithms.
The GPS plan is to add a third frequency signal (called L5) and add an unencrypted signal in L2. But it will take several years to have enough new satellites transmitting these new signals to make them usable for daily work.
In the near term, we have two complete systems, consisting of about 30 GPS and 27 GLONASS satellites. The current non-encrypted GLONASS signals give it an edge over the current GPS encrypted signals, given the fact that we have mitigated the GLONASS FDMA inter-channel biases.
GLONASS is also enhancing its control segment to better monitor GLONASS satellites and improve the system’s clock and orbit parameters. Most of these errors are cancelled in differential and high-precision applications anyway.
Existence of two complete and free systems, GPS and GLONASS, will place some doubt on the future of Galileo, as it will be extremely difficult for Galileo to hope to collect money from users to fund itself. The addition of Galileo, as a third system, will not really add much benefit for users anyway. The only push for deploying Galileo must come from some European military organizations to support their specific interest.
I have been extremely fortunate also to have had the opportunity to work on GPS from its early days, co-pioneering high-precision applications at Trimble Navigation. I owe a lot to Charlie Trimble, who helped me to lift myself up when I sought refuge in the United States in 1981. He taught me GPS as well as dedication in business. I also benefitted from Sunday meetings with Dr. Bradford Parkinson, the first program director of GPS, who was and still is a board member of Trimble Navigation. I am curious to find out how Brad, as a board member, voted in the recent matter of the purchase of Ashtech. Since leaving Trimble, my innovative products at Ashtech, JPS, and JAVAD GNSS have been well documented through the years in GPS World.
My emphasis on GLONASS in this memoir is only to record some histories and recognize GLONASS and some of its pioneers who were often overlooked. GPS is already a well-known, well-established system and is the backbone of GNSS.
As a final note, let me add that our current JAVAD GNSS products have the option of tracking all current and future signals of GPS, GLONASS, QZSS, and Galileo. Yes, Galileo too!
Plus: GLONASS CDMA Tracked, Third Beidou-2 Launched
The second report from non‐governmental members of the LightSquared/GPS Technical Working Group (TWG) was filed with the Federal Communications Commission (FCC) on April 15. For those anxious to see actual results of interference/desensitization of GPS receivers by the proposed LightSquared terrestrial signal — or, conversely, absence of said results — the report does not contain any such hard news. It relates the set-up of TWG work sub-teams to test various categories of GPS devices and receivers.
The sub-teams have identified laboratories for testing activities, developed test plans, and identified devices, receivers, and systems to be tested. Attachments to the report include current draft test plans and the current list of devices and receiver models submitted for testing by companies.
The following sections summarize the testing laboratories and devices selected for testing by each sub-team:
aviation
cellular
general location/navigation
high precision, networks, and timing. These three sub-teams are collaborating to a large extent.
space-based receivers.
The full report also includes a “high-level description of test plan” by each sub-team.
Aviation Sub‐Team. The aviation sub‐team will rely primarily on testing, funded by the Federal Aviation Administration (FAA), that will be performed at Zeta Associates Incorporated of Fairfax, Virginia.
Additional testing is planned by the U.S. government at White Sands Missile Range and Holloman Air Force Base, both in New Mexico, for use by the National PNT Engineering Forum (NPEF) LightSquared Working Group. These results will be considered for inclusion in the TWG Final Report by the aviation sub‐team. Presumably, this group will test military receivers, under classified categorization.
The aviation receivers are representative of those in use today. Their selection was based mainly upon device availability (those already owned by the FAA Technical Center). They are: Canadian Marconi GLSSU 5024; Garmin 300XL; Garmin GNS 430W; Garmin GNS 480; Rockwell Collins GLU‐920 multimode receiver; Rockwell Collins GLU‐925 multimode receiver; Rockwell Collins GNLU‐930 multimode receiver; Symmetricomm timing card (used for an FAA automation system); WAAS NovAtel G‐II ground reference station; and Zyfer timing receiver (used for the WAAS ground network).
Cellular Sub‐Team. The cellular sub‐team is in the process of engaging PC TEST, Columbia, Maryland; CETECOM, Milpitas, California; InterTek, Lexington, Kentucky; and ETS Lindgren, Cedar Park, Texas, for device testing.
The cellular sub‐team expects to test approximately 50 different device models. The selections represent current and legacy devices and have been prioritized based on sales volumes. While it is expected that there will be some representation of data‐only devices and femtocells, the testing will focus largely on handheld devices.
Those designated for testing are: Apple iPhone 4 (GSM and CDMA); HTC A6366; HTC ADR6200; HTC ADR63002; HTC ADR63003; HTC ADR6400L; HTC Touch Pro 2; LG Lotus Elite; LG Rumor Touch; LG VN250; LG VS740; LG VX5500; LG VX5600; LG VX8300; LG VX8360; LG VX8575; LG VX9100; LG VX9200; Motorola A855; Motorola DROID X; Motorola VA76R; Motorola W755; Nokia 6650; Nokia E71x; RIM 8330C; RIM 8530; RIM 9630; RIM 9650; RIM 9800; Samsung Moment; Samsung SCH‐U310; Samsung SCH‐U350; Samsung SCH‐U450; Samsung SCH‐U640; Samsung SCH‐U750; Samsung SGHi617; Samsung SGHi917; Sierra Wireless 250 U USG 3G/4G; and Sony Ericsson W760a.
General Location/Navigation. This sub-team has chosen Alcatel/Lucent as its initial facility for testing. Twenty-six devices were selected based on nominations by manufacturers represented on the sub‐team, considering the percentage of the installed user base.
They include: Garmin Forerunner 110 and 305; Garmin ETREX‐H; Garmin Dakota 20; Garmin Oregon 550; Garmin GTU 10; BI Inc. ExacuTrack One; Garmin GPS 17X; Garmin GPSMAP 441; Hemisphere Vector MV101; GM OnStar (model TBD); Garmin GVN 54; TomTom XL335; TomTom ONE 3RD Edition; TomTom GO 2505; Garmin nűvi 2X5W, 13XX, 3XX, and 37XX; Garmin GPSMAP 496; Garmin aera 5xx; Honeywell Bendix/King AV8OR; Trimble iLM2730; Trimble TVG‐850; Trimble Placer Gold; and Hemisphere Outback S3.
High Precision-Networks-Timing. The HPN&T sub‐teams are collaborating extensively to develop joint test plans and procedures. The joint sub-teams have chosen the U.S. Navy’s NAVAIR facility for testing.
To be tested are: Hemisphere R320; Hemisphere A320; Deere iTC; Deere SF‐3000; Deere SF‐3050; Trimble MS990; Trimble MS992; Trimble AgGPS 252, AgGPS 262, AgGPS 442, and AgGPS EZguide 500; Trimble CFX 750; Trimble FMX; Trimble GeoExplorer 3000 series GeoXH and GeoXT; Trimble GeoExplorer 6000 series GeoXH and GeoXT; Trimble Juno SB; Trimble NetR9 and NetR5; Trimble R8 GNSS; Trimble 5800; Leica SR530; Leica GX1200 Classic; Leica GX1230GG; Leica GR10; Leica Uno; Leica GS15; Topcon HiPer Ga and HiPer II; Topcon GR‐3 and GR‐5; Topcon MC‐R3; Topcon NET‐G3A; Topcon TruPath/AGI‐3; NovAtel PROPAK‐G2‐Plus; NovAtel FLEXG2‐STAR; NovAtel FLEXPAK‐G2‐V1, FLEXPAK‐G2‐V2 and FLEXPAK6; NovAtel PROPAK‐V3; NovAtel DL‐V3; Septentrio PolaRx3e; and Septentrio AsteRx3.
Space‐Based Receivers. Lab testing has been conducted at the NASA Jet Propulsion Laboratory (JPL) in California. The receivers are used by NASA for space‐based missions and high-precision science applications. The TWG agreed that these would be tested at JPL by NASA, with participation by LightSquared personnel, and the results provided to the TWG; see Appendix G
The devices tested are current or representative of GPS receivers in use by NASA or planned for use in the near future for space and science applications: TriG (NASA Next‐generation Space Receiver) and IGOR (Space Receiver).
NASA/JPL also tested the following high-precision receivers and shared the results with the HPT&N sub‐team: JAVAD Delta G3T (High Precision‐IGS) and Ashtech Z12 (High Precision‐IGS).
Conclusion. For all sub-teams, analyses will consider both LightSquared’s expected transmit power of 62 dBm per channel and its maximum authorized transmit power of 72 dBm per channel.
The WG co‐chairs will update the Commission on its progress in a subsequent report on May 16.
The April 15 TWG report contains these appendices: Working Group Roster; List of Receivers and Devices; Aviation Test Procedure; Cellular Test Plan Draft; General Location/Navigation Test Plan Draft; High Precision/Networks/Timing Test Plans Draft; Space‐Based Receivers Test Process.
GLONASS CDMA: New Era’s Dawn Glimpsed from Multiple Receivers
The newest Russian satellite, launched on February 26, began transmitting its new code-division multiple-access (CDMA) signal on April 7. In a clear break from all previous GLONASS signals, which are frequency-division multiple-access (FDMA), the new signal is expressly designed to be interoperable with current and future GPS signals, and with the coming Galileo signals, all of which have a CDMA structure. Thus, a new era of GNSS, truly global navigation satellite systems, began on April 7.
JAVAD GNSS was the first company to announce that it had tracked CDMA signals of the GLONASS-K satellite in
the L3 GLONASS band. Data was logged at the company’s Moscow office on April 8 from 02:30 until 07:30 UTC. The satellite’s pseudorange (in chips) and signal-to-noise ratio (in relative numbers) are shown in Figures 1 and 2.
Figure 1. GLONASS-K’s pseudorange in chips, courtesy of JAVAD GNSS. The y-axis goes from 0 to 12,000 in increments of 2,000; the x-axis goes from 0 to 500 in increments of 100. (Click to enlarge.)Figure 2. GLONASS-K’s signal-to-noise ratio (in relative numbers), courtesy of JAVAD GNSS. The y-axis goes from 0 to 10,000 in increments of 2,000; the x-axis goes from 0 to 500 in increments of 100. (Click to enlarge.)
On April 11, the satellite’s code-minus-phase and signal-to-noise ratio were tracked (Figures 3 and 4). Data quality is quite similar to GPS, according to the company.
Figure 3. GLONASS-K satellite’s code-minus-phase data (courtesy of JAVAD GNSS). (Click to enlarge.)Figure 4. GLONASS-K satellite’s signal-to-noise ratio (courtesy of JAVAD GNSS). (Click to enlarge.)
Future GLONASS satellites of the K1 and subsequent K2 generations will broadcast CDMA signals in multiple frequency bands. GLONASS-K satellites are markedly different from their predecessors. They are lighter, use an unpressurized housing (similar to that of GPS satellites), have improved clock stability, and a longer, 10-year design life. There will be two versions: GLONASS-K1 will transmit a CDMA signal on a new L3 frequency, and GLONASS-K2 will in addition feature CDMA signals on L1 and L2 frequencies. The CDMA signal in the L3 band has a center frequency of 1202.025 MHz.
The new generations of GLONASS signals and satellites are described in detail in the April “Innovation” column of GPS World, edited by Richard Langley.
Septentrio Navigation of Leuven, Belgium, also tracked GLONASS CDMA L3 signal with its AsteRx3 receivers. Figure 5 shows the C/N0 in dB-Hz of the legacy L1-C/A signal and of the data component of the new L3 CDMA signal. The graph covers the time span starting at 20:30 (UTC) on April 10 and ending at 02:00 on April 11. Figure 6 shows the de-trended code minus phase from L1-C/A and L3 signals. Such a plot provides a glimpse of the code measurement multipath and noise, according to the company.
Figure 5. GLONASS-K1 AsteRx3 measurements; C/N0 in dB-Hz of L1-C/A and L3 CDMA (courtesy of Septentrio Navigation).Figure 6. GLONASS-K1 AsteRx3 measurements; de-trended code minus phase of L1-C/A and L3 CDMA (courtesy of Septentrio Navigation).
Topcon Positioning Systems (TPS) also released data on the new signal, stating that signals from the new satellite “provide an additional accuracy advantage over older satellites.” Figures 7 and 8 show data from the company’s Moscow office.
Figure 7. Pseudorange-phase of four signals transmitted by the new K1 satellite (courtesy of Topcon Positioning Systems). (Click to enlarge.) Figure 8. Signal-to-noise ratios of four signals transmitted by the new K1 satellite (courtesy of Topcon Positioning Systems). (Click to enlarge.)
Finally, the German Aerospace Center’s Institute of Communications and Navigation recorded the spectrum of the GLONASS CDMA signal, captured with a 25-meter dish antenna, Raisting Satellite Earth Station, near Munich.
The signal spectrum spans at least 40 MHz (Figure 9). It contains additional sidelobes not shown in the plot. The plot indicates total power of all components of the transmitted signal.
Figure 9. GLONASS CDMA signal’s power over frequency (courtesy of the German Space Agency, DLR).
Third Beidou-2 IGSO Launched
China’s BeiDou-2 (Compass) satellite launched on April 9 has attained a circularized orbit, joining two inclined geosynchronous orbit (IGSO) satellites to form a mini-constellation centered on an east longitude of about 120 degrees. While BeiDou-IGSO-3’s orbit might still be tweaked slightly, it is clear that the orbits of the three satellites are arranged so that there will always be one satellite with a high elevation angle over China, according to the CANSPACE news service operated by the University of New Brunswick.
The latest spacecraft joins four geostationary satellites, a middle-Earth orbiting vehicle, and the two other IGSO satellites now on orbit. As the first Chinese launch in 2011, the new arrival presages much activity to come. With eight now flying, six more spacecraft are scheduled to rise by 2012, completing a 14-satellite constellation to provide a regional service over eastern Asia. The regional system will consist of five geostationary or GEO, five IGSO, and four medium-Earth orbit satellites.
Long-range plans envision a 35-satellite constellation providing global service by 2020: 27 MEOs, 5 GEO satellites, and 3 IGSOs. The satellites will transmit signals on the 1195.14–1219.14 MHz, 1256.52–1280.52 MHz, 1559.05–1563.15 MHz, and 1587.69-1591.79 MHz carrier frequencies.
Compass satellites have an announced lifespan of eight years.
Three IGSO satellite tracks over China (image courtesy of CANSPACE).
By Yuri Urlichich, Valeriy Subbotin, Grigory Stupak, Vyacheslav Dvorkin, Alexander Povalyaev, and Sergey Karutin
A team of authors from Russian Space Systems, a key developer of navigation and geospatial technologies in the Russian aerospace industry, describes the new L3 CDMA signal to be broadcast by GLONASS-K satellites and the progress to date in developing the SDCM augmentation system.
INNOVATION INSIGHTS by Richard Langley
IT’S NO LONGER JUST A GPS WORLD. Russia’s GLONASS, or Global′naya Navigatsionaya Sputnikova Sistema, will soon have a full complement of satellites in orbit providing positioning, navigation, and timing worldwide.
The Soviet Union began development of GLONASS in 1976 just a few years after work started on GPS. The first satellite was launched in 1982 and a fully populated constellation of 24 functioning satellites was achieved in early 1996. However, due to economic difficulties following the dismantling of the Soviet Union, by 2002 the constellation had dropped to as few as seven satellites. But the Russian economy improved, and restoration of GLONASS was given high priority by the Russian government. The satellite constellation was gradually rejuvenated using primarily a new modernized spacecraft, GLONASS-M. The new design offered many improvements, including better onboard electronics, a longer lifetime, an L2 civil signal, and an improved navigation message. The GLONASS-M spacecraft still used a pressurized, hermetically sealed cylinder for the electronics, as had the earlier versions. Today, 26 functional GLONASS-M satellites are on orbit, 22 of them in service and providing usable signals, with four more having reserve status. A full constellation of 24 satellites should be available later this year with launches of several GLONASS-M satellites and the latest variant, the GLONASS-K satellite.
GLONASS-K satellites are markedly different from their predecessors. They are lighter, use an unpressurized housing (similar to that of GPS satellites), have improved clock stability, and a longer, 10-year design life. They also include, for the first time, code-division-multiple-access (CDMA) signals accompanying the legacy frequency-division-multiple-access signals. There will be two versions: GLONASS-K1 will transmit a CDMA signal on a new L3 frequency, and GLONASS-K2, in addition, will feature CDMA signals on L1 and L2 frequencies. The first GLONASS-K1 satellite was launched on February 26 and is now undergoing tests.
GLONASS is being further improved with a satellite-based augmentation system. Called the System for Differential Correction and Monitoring or SDCM, it will use a ground network of monitoring stations and Luch geostationary communication satellites to transmit correction and integrity data using the GPS L1 frequency. The first of these satellites, Luch-5A, will be launched this year.
In this month’s column, a team of authors from Russian Space Systems, a key developer of navigation and geospatial technologies in the Russian aerospace industry, describes the new L3 CDMA signal to be broadcast by GLONASS-K satellites and the progress to date in developing the SDCM augmentation system.
The Russian Global Navigation Satellite System (GLONASS) is once again approaching full operation. As of March, 22 satellites are in service, providing nearly continuous global coverage. These satellites are modernized GLONASS or GLONASS-M satellites, transmitting the legacy frequency-domain-multiple-access (FDMA) navigation signals in the L1 and L2 frequency bands.
The structure of the navigation signals transmitted by the satellites determines the accuracy of the pseudorange measurements, which, in turn, affects a user’s position accuracy. Evolution of the GLONASS navigation signals is a top priority for the overall system development. A new version of the satellites, GLONASS-K, will broadcast a code-division-multiple-access (CDMA) signal in the L3 band for the first time in the system’s history. In addition to the change in signal parameters, new navigation information will be transmitted to users through this signal. Further GLONASS navigation signal development assumes that a new CDMA civil signal will also become available in the L1 and L2 bands.
The evolution of GNSS augmentation is also an important task in the development of satellite navigation in Russia. The Russian satellite-based augmentation system (SBAS), the System for Differential Correction and Monitoring (SDCM), is entering into the deployment phase and that is why some aspects of interoperability and compatibility with other SBASs become important. Taking into account the fact that satellite channels are the most efficient and universal tool to supply GNSS users with precise ephemeris and clock parameters and the positive experience of regional systems (such as the Quasi-Zenith Satellite System), we can see the potential for the development of a precise positioning service.
In this article, we will discuss plans for modernizing GLONASS, covering both the new signals and the augmentation service.
Navigation Signals
The main task for GLONASS development is an extension of the ensemble of navigation signals. This extension means that new CDMA signals in the L1, L2, and L3 bands will be added to the existing FDMA signals. The GLONASS satellites will keep broadcasting the legacy signals until the last receiver stops working.
The first phase in the implementation of CDMA technology on GLONASS-K satellites includes a new signal in the L3 band on a carrier frequency of 1202.025 MHz. The first GLONASS-K satellite was launched on February 26, 2011, and is undergoing tests. The ranging code chipping rate for the CDMA signal is 10.23 megachips per second with a period of 1 milliseconds. It is modulated onto the carrier using quadrature phase-shift keying (QPSK), with an in-phase data channel and a quadrature pilot channel. The signal spectrum is shown in Figure 1.
Figure 1. L3 CDMA signal spectrum (frequencies in MHz).
A block diagram of how the GLONASS L3 signal is formed is presented in Figure 2. The set of possible ranging codes consists of 31 truncated Kasami sequences. (Kasami sequences are binary sequences of length 2m – 1 where m is an even integer. These sequences have good cross-correlation values approaching a theoretical lower bound. The Gold codes used in GPS are a special case of Kasami codes.) The full length of these sequences is 214 – 1 = 16,383 symbols, but the ranging code is truncated to a length of N = 10,230 with a period of 1 milliseconds and with the following initial state (IS) in the generator (G) registers: G2 – IS = 00110100111000, G1 IS = n, G3 IS = n + 32. It these equations, n is the system number of the satellite in the orbit constellation. For these codes, inter-channel jamming is about –40 dB.
Figure 2. Formulation of L3 CDMA signal.
The navigation message symbols (NSs) are transmitted at a rate of 100 bits per second with half-rate convolution coding (CC) with a memory of 6. This means that the duration of an NS is 10 milliseconds and the duration of the CC symbols is 5 milliseconds. The CC switch (see Figure 2) should be in the lower position for the first half of each NS.
The pseudorandom sequence of the L3 data signal, PRS-D, is modulo-2 summed with a periodic 5-bit Barker code (BC = 00010) b
efore phase modulation. Barker code symbols have a duration of 1 millisecond and are synchronized with the pseudorandom code symbols. The pseudorandom sequence of the L3 pilot signal, PRS-P, is modulo-2 summed with a 10-bit Neuman-Hoffman code (NH = 0000110101). The Neuman-Hofman code symbols have a duration of 1 millisecond and are synchronized with the information symbols. The Barker and Neuman-Hoffman codes are used for CC synchronization in the L3 user’s receiver (see Further Reading for background details).
The navigation message superframe (2 minutes long) will consist of 8 navigation frames (NFs) for 24 regular satellites in the GLONASS first modernization stage and 10 NFs (lasting 2.5 minutes) for 30 satellites in the future. Each NF (15 seconds long) includes 5 strings (3 seconds each). Every NF has a full set of ephemerides for the current satellite and part of the system almanac for three satellites. The full system almanac is broadcast in one superframe. A time marker is located at the beginning of a string and given as a number of a string within the current day in the satellite time scale.
The GLONASS system and the satellites’ time scales are coordinated with the Russian national time scale, UTC(SU), which is periodically adjusted for a leap seconds. A special flag, A, is used in each frame to inform users about an anomalous fifth string of this frame. If А = 0, the fifth string will be normal with a 3-second duration; if А = 1, the fifth string will be either 2 seconds or 4 seconds. The correction value (+1 second or –1 second) is also transmitted in the special NF flag, KP. If KP = 11, the fifth string will be shorter due to a correction of –1 second; if KP = 01, it will be longer due to a correction of +1 second. A user should not use the short string. A string is lengthened by adding “0” to the normal string. This algorithm is implemented with the objective of simplifying the time scale correction process in user equipment.
Modulation and Multiplexing. There are intensive studies being carried out for developing new CDMA signals in the L1 and L2 bands in addition to the L3 signal described above. The main difficulties to be overcome in these studies are to ensure a low-power spectral density (PSD) of –238 dBW/m2/Hz in the 1610.6–1613.8 MHz radio astronomy band and the multiplexing of more than two signal components, providing a constant signal level.
The first task could be solved by using a modulation with a low PSD level in the radio astronomy band, such as a binary offset carrier (BOC) modulation with a subcarrier frequency of 5.115 MHz and a spreading code chipping rate of 2.5575 megachips per second (BOC(5, 2.5)) as shown in Figure 3.
Figure 3. BOC(5, 2.5) signal spectrum (frequencies in MHz).
There are two well-known methods of signal multiplexing — time multiplexing and amplitude equalizing. The time multiplexing technique is used for the GPS L2C signal, while the amplitude equalizing method is used for the composite BOC (CBOC) signals in the Galileo E1/L1 band and the alternative BOC (AltBOC) signals in E5a-E5b bands. This method has the disadvantage of about 10–16 percent loss of the transmitter power on the equalization. However, it has an advantage: simple user equipment architecture and, more importantly, the possibility of step-wise implementation of the multicomponent signal. The step-wise approach is compatible with older receivers. New user equipment will be able to track both old and new signal components, as well as a combined signal consisting of old and new components. Vector and phase diagrams for two-, four-, and six-component AltBOC signals are shown in Figure 4. Even with six components, losses are lower than about 16 percent, but it is possible to avoid any loss using time multiplexing. That is why the final decision about future GLONASS signals has not yet been made.
Figure 4. Vector and phase relationships for AltBOC signals with (a) 2-, (b) 4-, and (c) 6-components, with losses of 0, and about 15 and 16 percent respectively.
There have been extensive studies on the definition of the ensemble of code sequences with a minimum level of interchannel jamming. It was found that the jamming level for random shifts does not depend on the code type, but rather depends on the number of symbols, N, in a period. Cross-correlation functions for Kasami 4095 and Weil 10230 codes are shown in Figures 5 and 6. (Kasami codes, as previously mentioned, are being used for the GLONASS L3 CDMA signal. Weil codes are prime length sequences constructed from the well-known Legendre sequences and are used for the GPS L1C signal.) For comparison, we show cross-correlation functions for random codes with equal lengths on the same figures. It is obvious that the histograms of predefined and random codes are close to being equal. Sidelobe dispersion levels are lower than 0.1 dB.
The results obtained from the studies allow us to draw a conclusion about the invariance of the stochastic characteristics of inter-channel interference using a code structure with a fixed length of N symbols. That is why it is possible to choose an ensemble of binary code sequences on the basis of generation simplicity.
Figure 5. Kasami and random code cross-correlation functions (4,095 symbols).Figure 6. Weil and random code cross-correlation functions (10,230 symbols).
GLONASS Augmentation Development
SDCM has been under development since 2002. The main elements of the system, including the network of reference stations in Russia and abroad, the central processing facility (CPF), and the SDCM information distribution channel, have been designed.
Ground Stations. The SDCM uses 14 monitor stations in Russia and two in Antarctica at Russia’s Bellingshausen and Novolazarevskaya research stations. Eight more monitor stations will be added in Russia and several more outside Russia. The additional overseas stations may include sites in Latin America and the Asia-Pacific region.
Central Processing. Raw measurements (GLONASS and GPS L1 and L2 pseudorange and carrier-phase measurements) from the ground stations come to the SDCM CPF. The CPF calculates the precise satellite ephemerides and clocks, controls integrity, and generates the SBAS messages. The format of these messages is compliant with the international standard also used by the Wide Area Augmentation System (WAAS), the European Geostationary Navigation Overlay Service (EGNOS), and the Japanese Multi-functional Transport Satellite (MTSAT) Satellite-based Augmentation System (MSAS).
Format Limitations. The current SBAS format has a limited capability for broadcasting corrections for GLONASS and GPS satellites combined. There is space for only 51 satellites, insufficient for the current number of satellites on orbit. As a result, studies are looking into the efficiency of SDCM data broadcasting in an attempt to resolve this contradiction. The three main options are: use a dynamic satellite mask, use two CDMA signals, or provide an additional SBAS message.
Under the first option, SDCM satellites would only broadcast corrections and integrity data for those GLONASS and other GNSS satellites in view of users in the territory of the Russian Federation. For the second option, SDCM satellites would transmit two CDMA signals with independent sets of correc
tions and integrity data on each signal. The third option assumes that the SDCM data stream would have additional messages with information about satellites not included in the initial list of 51.
The first scenario is possible with the current version of the SBAS format. The other two options require some changes in the format of SBAS messages and international coordination. But the SDCM CPF is ready to operate in all of these modes.
Distribution. The main advantage of SBAS is its universal space channel to users. The SDCM orbit constellation will consist of three geostationary satellites from the multifunctional space relay system Luch (see Figure 7). Luch, which means “ray” or “beam” in Russian, will be used to relay communications between low Earth-orbiting spacecraft and ground facilities in Russia in a similar fashion to that of NASA’s Tracking and Data Relay Satellite System. The satellites will also include transponders for relaying SDCM signals from the CPF to users. The first satellite, Luch-5A, will be launched this year and will occupy an orbital slot at 16° west longitude. Luch-5B will be launched in 2012 to a slot at 95° east longitude. The full constellation will be deployed by 2014 with the launch of Luch-4 into a slot at 167° east longitude.
Figure 7. Multifunctional relay system Luch.
Wideband transponders (22 MHz) will be installed on board the Luch-5A and Luch-5B satellites. These transponders will transmit signals on a carrier frequency of 1575.42 MHz. As the SDCM service area is Russian territory, the main beam will be directed to the north with an angle of 7 degrees relative to the direction to the equator. The transmitted power will be 60 watts and will give a signal power level at the Earth’s surface roughly equal to that of GLONASS and GPS signals, about –158 dBW.
SDCM will also provide service through the Internet. A system website (www.sdcm.ru) already gives users information about real-time and a posteriori GLONASS and GPS monitoring (see Figure 8). An SDCM data-broadcasting ground system has been developed and is being tested now. It will help to verify SDCM data before the Luch satellites are launched. SDCM SBAS messages will be transmitted through the Internet in real time using the SISNeT (Signal in Space through the Internet) approach. The SISNeT protocol was developed for relaying EGNOS messages over the Internet.
Figure 8. SDCM website, www.sdcm.ru.(Click to enlarge.)
A set of experiments was carried out to evaluate SDCM performance. In one experiment, 130 hours of raw pseudorange data was processed to generate the results shown in Figure 9. The upper plot shows the positioning results of a stand-alone receiver working only with the GLONASS and GPS signals. The lower plot presents results of GLONASS/GPS/SDCM navigation. It is clear that the SDCM ephemeris and clock corrections improve user accuracy by more than a factor of two.
Figure 9. SDCM tests results; (a) without and (b) with SDCM corrections.
However, precise point positioning (PPP) technology, based on post-processing dual-frequency carrier-phase measurements with precise satellite ephemeris and clock data, expands the areas of practical use of satellite positioning without complex user ground infrastructure of reference stations and wireless communication channels. Studies have already demonstrated that decimeter-level PPP is possible using GLONASS data or GLONASS data in combination with GPS data. Tests are under way to deliver the precise satellite ephemeris and clock data over the Internet to allow real-time PPP. We can envisage that some time in the future, the ephemeris and clock data could be provided to users in real time using satellite signals.
Future SDCM Satellites. The first SDCM satellites will provide service over the main part of Russia, excluding northern regions. To cover those regions, the SDCM orbit constellation could be enlarged using satellites in circular, inclined geosynchronous orbit (GSO); inclined, elliptical geosynchronous orbit (IGSO); or Molniya-type highly elliptical orbit (HEO) with an orbital period of precisely one-half of a sidereal day.
A comparative availability analysis for satellites with different orbits shows that using four GSO/IGSO/HEO satellites in two planes allows a user anywhere in Russia to continuously receive a signal from two satellites with a minimum elevation angle of 5 degrees. If the elevation mask angle is 30 degrees, availability will fall to 0.9 for IGSO satellites and 0.8 for HEO satellites. An orbit constellation of GSO satellites provides an availability of 0.8 and 0.3 for 5- and 30-degree mask angles respectively.
It is important to point out that the development of satellite orbit and clock prediction technology allows us to consider the possibility of using GSO, IGSO, or HEO satellites for ranging signal broadcasting. In that case, the navigation message could include precise ephemerides and clock data for all GNSS satellites to provide the data for a PPP service as mentioned earlier.
Conclusion
GLONASS development is entering a new historical phase. New CDMA navigation signals and deployment of a national SBAS system will provide not only a new quality of navigation service, but the basis for a regional precise navigation system with an accuracy of a few decimeters for users in Russia and neighboring countries.
Acknowledgment
This article is based on the paper “GLONASS Developing Strategy” presented at ION GNSS 2010, the 23rd International Technical Meeting of The Institute of Navigation, Portland, Oregon, September 21–24, 2010.
Yuri Urlichich is the general director and general designer of the Joint Stock Company (JSC) Russian Space Systems, formerly the Russian Institute of Space Device Engineering, headquartered in Moscow. He is a GLONASS general designer, doctor of science, professor, and author of more than 150 papers and 20 patents.
Valeriy Subbotin is a first deputy general director and general designer of JSC Russian Space Systems and a doctor of science. He has worked in the space industry for more than 40 years and has published more than 45 papers.
Grigory Stupak is a deputy general director and general designer of JSC Russian Space Systems, a GLONASS deputy general designer, and a professor of Bauman Moscow State Technical University (BMSTU). He has worked in the space industry for 35 years and has published more than 150 papers.
Vyacheslav Dvorkin is a deputy general designer of JSC Russian Space Systems and a doctor of science. Dvorkin has been developing GLONASS, GNSS augmentations, and user equipment for more than 35 years. He is an author of 50 papers in the satellite navigation field.
Alexander Povalyaev is a deputy head of division in JSC Russian Space Systems and a professor of Moscow Aviation Institute. He has been developing methods and algorithms for processing GNSS carrier-phase measurements for 30 years and has published more than 40 papers.
Sergey Karutin is a deputy head of division in JSC Russian Space Systems and an assistant professor at BMSTU. Karutin has been on the GLONASS team since 1998, developing GNSS augmentations and user equipment. He received a Ph.D. degree in 2004.
GLONASS Interface Control Document, Edition 5.1, Russian Institute of Space Device Engineering, Moscow, 2008.
“The Spreading and Overlay Codes for the L1C Signal” by J.J. Rushanan in Navigation, Vol. 54, No. 1, Spring 2007, pp. 43–51.
Spread Spectrum Systems for GNSS and Wireless Communications by J.K. Holmes, Artech House, Inc., Norwood, Massachusetts, 2007.
“The Galileo Code and Others” by G.W. Hein, J.-A. Avila-Rodriguez, and S. Wallner in Inside GNSS, Vol. 1, No. 6, September 2006, pp. 62–74.
• System for Differential Correction and Monitoring
“Russian System for Differential Correction and Monitoring: A Concept, Present Status, and Prospects for Future” by S.V. Averin, V.V. Dvorkin, and S.N. Karutin in Proceedings of ION GNSS 2006, the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, Texas, September 26–29, 2006, pp. 3037–3044.
Minimum Operational Performance Standards for Global Positioning/Wide Area Augmentation System Airborne Equipment, RTCA/DO-229D, prepared by SC-159, RTCA Inc., Washington, D.C., December 13, 2006.
“Appendix B. Technical Specifications for the Global Navigation Satellite System (GNSS)” in Aeronautical Telecommunications: International Standards and Recommended Practices, Annex 10 to the Convention on International Civil Aviation, Vol. I. Radio Navigation Aids, (6th ed.), International Civil Aviation Organization, Montreal, Quebec, Canada, 2006.
• SISNeT
“Proposal of an Internet-Based EGNOS Receiver Architecture and Demonstration of the SISNeT Concept” by E. González, M. Toledo, A. Catalina, C. Barredo, F. Torán, and A. Salonico in Proceedings of ION GPS/GNSS 2003, the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, Oregon, September 9-12, 2003, pp. 1628–1641.
• Precise Point Positioning
“An Evaluation of OmniStar XP and PPP as a Replacement for DGPS in Airborne Applications” by J.S. Booth, and R.N. Snow in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 1188–1194.
“Precise Point Positioning for Real-Time Determination of Co-Seismic Crustal Motion” by P. Collins, J. Henton, Y. Mireault, P. Héroux, M. Schmidt, H. Dragert, and S. Bisnath in Proceedings of ION GNSS 2009, Savannah, Georgia, September 22–25, 2009, pp. 2479–2488.
“Orbits and Clocks for GLONASS Precise-Point-Positioning” by R. Píriz, D. Calle, A. Mozo, P. Navarro, D. Rodríguez, and G. Tobías in Proceedings of ION GNSS 2009, Savannah, Georgia, September 22–25, 2009, pp. 2415–2424.
“Study on Precise Point Positioning Based on Combined GPS and GLONASS” by X. Li, X. Zhang, and F. Guo in Proceedings of ION GNSS 2009, Savannah, Georgia, September 22–25, 2009, pp. 2449–2459.
According to a Roscosmos report, the state commission governing rocket launches will launch GLONASS-K1 on February 26 at 03:06 UTC. The launch of GLONASS-K1 has been pushed back for “technical reasons.” The original schedule called for a February 24 launch.
Quoting the commander of the Russian Space Forces, Lieutenant-General Oleg Ostapenko, an Interfax news item stated that there was insufficient time to ready the rocket for launch february 25, though it was announced as a launch date following the scrub on February 25. “The probability of a launch on the 26th is very high,” Ostapenko said.
Meanwhile, Komsomolskaya Pravda quoted an unnamed space industry official as saying that if the launch is not held tomorrow, it will be put off for a month. “[The decision will be] once again to be safe, rather than to carry out the launch, which for technical reasons, was postponed for the second day in a row. Without further checks, and to eliminate technical problems, no one [wants to] take responsibility to conduct the launch,” he said.
Gazeta.ru, an online Russian newspaper, has carried a report in which Nikolai Testoedov, the chief designer and CEO of Information Satellite Systems Reshetnev states that seven GLONASS satellites will be launched this year. In addition to GLONASS-K satellites being launched this month and in December, five GLONASS-M satellites will be launched. Three will be launched on a Proton-M rocket from Baikonur (this launch is expected in June). He said that, in addition, two GLONASS-M satellites will be launched on the Soyuz-2 rocket from Plesetsk. The first of the five GLONASS-M satellites is to be delivered to the customer on February 28.
How GLONASS helps fill in gaps in GPS coverage for a user with a combined GPS/GLONASS receiver.
When the Russian GLONASS system lost three new satellites in a recent launch failure, did this long-standing navigation system lose some momentum? The reports out of Russia had indicated renewed enthusiasm and commitment to put a revived, complete constellation back in its rightful GNSS place. Launch of an L3 CDMA demonstrator satellite is apparently forecast for late February, and work on the Russian SBAS ground network (known as SDCM) also appears to be proceeding. We can only hope that Russia does not back away from its strong push to not only restore one of the world’s primary satellite navigation systems to its former glory, but to also “modernize” the signals it broadcasts.
But why do commercial users care about GLONASS? Everyone is already enjoying an enhanced and growing GPS signal in space with loads of satellites and the promise of a rejuvenated GPS constellation with even more signals and features. Well, actually GLONASS has been around for a long time and it has become a system that a lot of users rely on, especially those in the high-accuracy real-time kinematic (RTK) community.
GLONASS may not itself directly enhance accuracy, but the availability of ~21 healthy satellites certainly helps fill in gaps in GPS coverage for a user with a combined GPS/GLONASS receiver. Those extra space vehicles (SVs) when added into an RTK solution can make the difference between accurate, reliable RTK and no RTK or only intermittent RTK.
Back in the early days of a complete, reliable GLONASS constellation, at least one manufacturer embraced and integrated these signals with GPS and was able to demonstrate the best RTK it had ever seen. Other manufacturers followed, and soon high-precision GPS/GLONASS receivers became the norm. As the GLONASS constellation decayed over the next several years, the advantages of dual-constellation receivers fell away somewhat, and GPS-only RTK receivers became more common. Then, almost 10 years ago, as the news of an impending GLONASS revitalization filtered into users and manufacturers, at first in Europe and then throughout the rest of the world, a new generation of dual-function GPS/GLONASS receivers was developed and fielded.
In the process, manufacturers outside Russia dusted off their old GLONASS tracking algorithms, and it became clear that some inside knowledge might be needed. Over time, it became clear that some GLONASS satellites had their own distinct personality, each of which had to be accommodated in a more complex tracking, position, and RTK solution. Allowances were made, and the ultimate goal of more robust, more reliable RTK using both GPS and GLONASS was eventually achieved.
Robust, reliable RTK mean that survey missions can be completed without intermittent or total loss of high-accuracy measurements. Crews operating in difficult locations could avoid the expense of making repeated measurements or avoid the drastic solution of a subsequent complete re-survey. Dual-function, dual-frequency receivers became cost-effective for these users and those involved in machine control, construction, high-precision mapping, precise shipping-container location, and for many other high-value, difficult operations requiring RTK.
But what happens to users with GPS/GLONASS receivers when Galileo, Compass, IRNSS, QZSS and other regional, more capable SBAS systems around the world all come on line? The promise of huge numbers of additional usable signals has yet to be realized, but provided that momentum is maintained with these developing systems, the signal “landscape” will change considerably in the future. And manufacturers are already anticipating those changes — multiple constellation receivers are already available in the market — but RTK is only possible with signals that exist, so GPS/GLONASS RTK is still king.
It may be reasonable to assume that GLONASS users in countries that are politically aligned or who are trading partners with Russia will hang onto these signals. India and China may have their own systems in the future, but users in both countries already appear to subscribe to the GLONASS club, and politics may play a role in maintaining this user base. Of course, GLONASS use is now mandated in Russia. Surprisingly, European and even North American users may also currently form a significant part of the existing GLONASS user group. As Galileo comes on line, the situation in Europe and elsewhere might well change.
And when GPS L5 comes on line some time in the future, manufacturers will be able to dump their complex P-codeless tracking techniques. Low-cost RTK will become a real possibility, and the advantages of lower-cost receivers may begin to outweigh the cost-benefits of complex multi-constellation receivers for some niche users. But with Galileo E5 and IRNSS L5 on the same (well almost) frequency, its likely that multi-constellation receivers will fall in price with volume and will ultimately become commonplace.
And if you already have all those GLONASS gates in your ASIC and GLONASS tracking algorithms implemented in your future powerful processor, its possible that GLONASS will still form a basic element of precision navigation for most future GNSS users.
Now, should the promised GLONASS innovations keep pace over time with all these other investments in GNSS system growth — and a complete GLONASS constellation with CDMA signals allows manufacturers to reduce receiver complexity and still hang onto GLONASS capability — then it’s a good guess that GLONASS will remain with us all for a long time as a basic system which we will all depend on.
 Join GPS World’s Survey and GIS Editor Eric Gakstatter March 15 for the webinar, “Everything Else but GPS: How GLONASS, Galileo, and Compass Will Affect High-Precision Users.” The webinar will be held at 10 a.m. Pacific (1 p.m. ET/6 pm. GMT); registration is free.
Join GPS World’s Survey and GIS Editor Eric Gakstatter March 15 for the webinar, “Everything Else but GPS: How GLONASS, Galileo, and Compass Will Affect High-Precision Users.” The webinar will be held at 10 a.m. Pacific (1 p.m. ET/6 pm. GMT); registration is free.