One of India’s four navigation satellites has failed, a setback for the NAVIC network. Satellite IRNSS-1F was lost after its atomic clock stopped functioning.
Only three satellites — IRNSS-1B, IRNSS-1L and NVS-01 — remain operational for providng positioning, navigation and timing (PNT) services across the Indian subcontinent. The loss of one degrades location services provided by the NavIC system, a regional navigation satellite system designed to augment global systems (an SBAS).
“IRNSS-1F satellite launched in March 2016 has completed its design mission life of 10 years on 10th March 2026,” the Indian Space Research Organisation (ISRO) announced. “On 13th March 2026, [the] procured on-board atomic clock stopped functioning. However, the satellite will continue to function in-orbit for various societal applications to provide one-way broadcast messaging services.”
Since July 2013, the Indian Space Research Organization (ISRO) has launched 11 satellites. Since then, six have failed, largely due to defective imported atomic clocks in the initial phase and, in some recent cases, because of orbital complications.
In 2025, the government stated that only four of the 11 satellites deployed for the NavIC system were fully operational for PNT services, while the remaining spacecraft were being utilized in a limited or sub-optimal capacity.
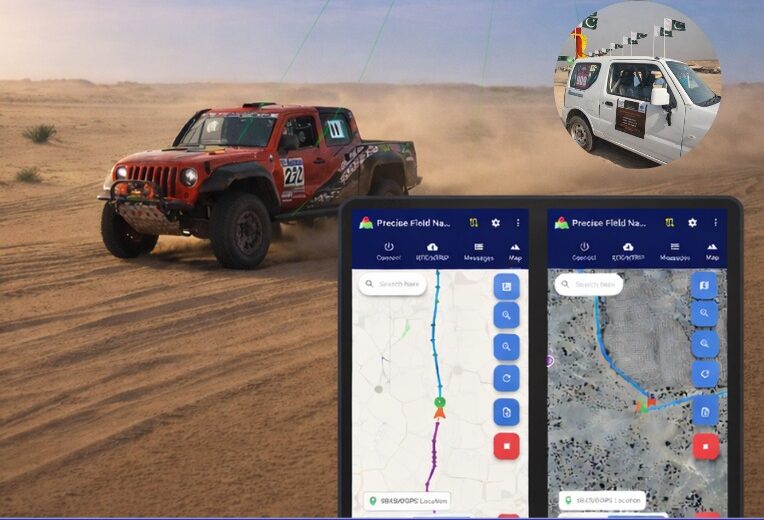
Pakistan’s national space agency SUPARCO (Space and Upper Atmosphere Research Commission) has achieved a major milestone in navigation technology with the successful launch of its Pak-SBAS satellite-based augmentation system (SBAS) device and service.
The Pak-SBAS navigation service was rigorously tested in the extreme desert conditions of Cholistan during Cholistan Desert Rally 2026. The Cholistan desert experinces high speeds, unpredictable routes, and the absence of visual landmarks that demand exceptional positioning accuracy and signal reliability for autos and motorcycles.
Throughout the rally, Pak-SBAS demonstrated remarkable performance by delivering highly precise location data, stable signal continuity, and integrated route tracking.
By applying SBAS corrections, the system significantly reduced positioning errors compared to conventional GNSS technologies, offering rally drivers and navigation teams a new level of confidence essential for competitive desert racing.
According to a SUPARCO spokesperson, the Pak-SBAS technology holds vast potential beyond motorsports. It is expected to enhance disaster response operations through accurate tracking of rescue teams and affected areas, improve transport efficiency via real-time vehicle positioning, and strengthen aviation safety with more reliable navigation support.
The system also will benefit the surveying and mapping sectors by minimizing positional inaccuracies and reducing project costs.
The v4.1.0 update includes new SouthPAN SBAS capabilities and additions to the graphical user interface (GUI).
Ginan is an open-source toolkit for creating precise point positioning (PPP) analysis products, correction streams and positions. It is being actively developed in a Geoscience Australia Positioning Australia program.
The source code for the current version of Ginan is available for download from GitHub. New versions of Ginan with enhanced capabilities will be developed and released over time.
Geoscience Australia is establishing operational instances of Ginan that produce PPP analysis products and streams on a continuous basis, and which are available free of charge.
The agreement ensures Europe’s satellite-based augmentation continues enhancing navigation for aviation and other critical users and lowering emissions.
SES, a space solutions company, and the European Union Agency for the Space Programme (EUSPA) have announced an extension of the European Geostationary Navigation Overlay Service (EGNOS) GEO-1 satellite service agreement through 2030, with an option to extend until 2032, helping maintain high-precision navigation services for aviation and other critical users across Europe.
By improving the accuracy and integrity of satellite positioning signals, EGNOS supports aircraft in landing in low-visibility conditions, as well as planning more efficient routes, reducing fuel burn and CO₂ emissions.
At the core of the EGNOS service is Europe’s regional satellite-based augmentation system (SBAS) that improves the accuracy and reliability of GNSS signals, such as GPS. Beyond aviation, EGNOS supports maritime navigation and precision-driven agriculture, contributing to efficient operations and sustainability by reducing fuel consumption and emissions.
Under the extended GEO-1 contract, SES will continue operating an EGNOS-hosted payload on its SES-5 satellite, as well as the ground segment from its facilities in Europe.
“This extension ensures a robust EGNOS space segment, ready for the transition towards its next version and the development of new services, while safeguarding high-precision navigation for aviation and other critical users across Europe,” said Rodrigo da Costa, EUSPA executive director.
“EGNOS is a cornerstone of Europe’s aviation and broader navigation applications. The agreement underscores SES’ and EUSPA’s joint commitment to advancing satellite-based services that enable secure, reliable, and sustainable navigation solutions,” said Philippe Glaesener, senior vice president, Global Government at SES. “Thanks to the service, millions of users and operators will benefit from efficient and more reliable air transportation services across all of Europe. This commitment reflects our broader mission of delivering resilient satellite solutions for critical infrastructures.”
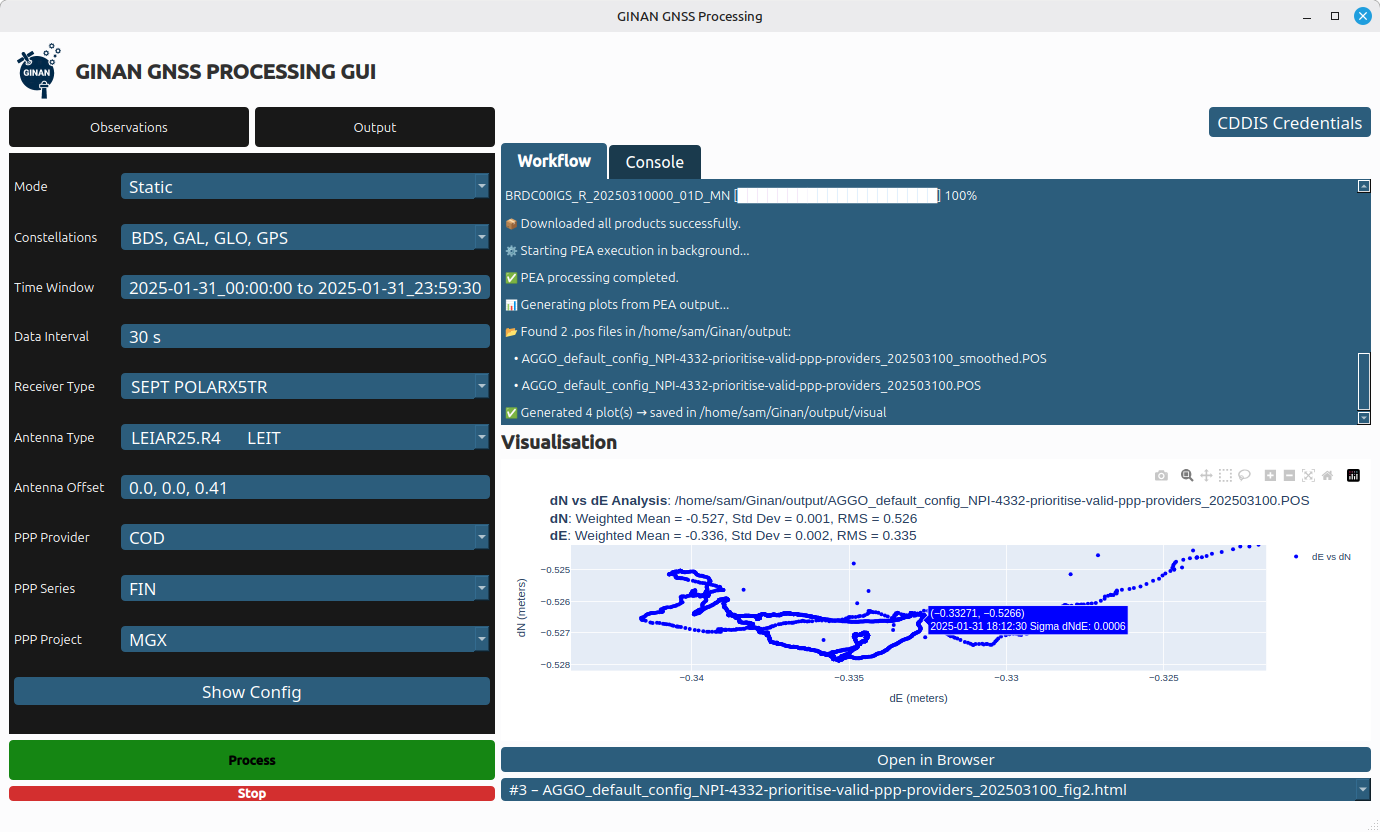
Geoscience Australia has released Ginan V4, the latest version of its home-grown, open-source toolkit for precise point positioning.
Developed under the Positioning Australia program, Ginan V4 delivers world-class GNSS capabilities to innovators, researchers and industry professionals.
Version 4 features a new intuitive graphical user interface (GUI) that makes data processing faster, easier and more accessible. The new GUI was designed to lower the barrier to entry for users across sectors. With simple data loading and streamlined output downloads, the new interface enables anyone — from navigation specialists to disaster response teams — to harness centimeter-level accuracy without needing advanced technical expertise.
Ginan V4 also introduces enhanced robustness and improved software formatting, reducing errors and accelerating processing speeds. Users can expect smoother workflows and reliable results, whether calculating orbital mechanics or pinpointing precise locations on Earth’s surface.
Ginan V4 remains fully modular, empowering users to build their own capabilities depending on their needs. From surveying and geospatial analysis to emergency response and scientific research, the toolkit supports innovation across diverse applications.
Key benefits of Ginan V4
User-friendly interface. Simplifies data loading and output generation.
Enhanced robustness and speed. Fewer errors, faster processing.
Modular design. Customize capabilities for orbital mechanics, surveying or disaster response.
GNSS accuracy. Centimeter-level precision based on satellite observations.
Free and open source. Available to download via Geoscience Australia’s GitHub.
As part of Positioning Australia’s suite of capabilities, Ginan V4 reflects Geoscience Australia’s commitment to delivering GNSS capabilities that support innovation, safety and productivity. By making the software free and open source, the program ensures that Australian expertise continues to drive global advances in positioning technology.
Ginan V4 is available for free download on Geoscience Australia’s GitHub. More information can be found at ga.gov.au/positioning.
SouthPAN includes Safety-of-Life L1 SBAS for civil aviation and open services for precise point positioning and next-generation SBAS.
The Southern Positioning Augmentation Network (SouthPAN) has successfully completed its Critical Design Review (CDR), marking a pivotal milestone towards delivering advanced satellite-based augmentation services (SBAS) across Australia and New Zealand.
Led by Lockheed Martin Australia, with GMV as a key strategic partner, SouthPAN is jointly supported by the Australian and New Zealand governments to provide satellite navigation and precise positioning services throughout Australasia.
The Critical Design Review represents a vital checkpoint in the lifecycle of a safety-critical system such as SouthPAN, validating that the design meets stringent performance, safety and security requirements necessary for civil aviation operations. As part of this milestone, the SouthPAN team provided comprehensive certification artifacts aligned with international aviation standards, including ARP 4754A for systems development processes, DO-254 for hardware, and DO-278A for software assurance.
The successful completion of the CDR demonstrates that the system’s architecture and implementation will satisfy the rigorous design assurance levels mandated for safety-of-life applications. Achieving this milestone confirms the readiness of the system’s design for operational deployment and marks a critical step forward towards its future certification for safety‑of-life services in the aviation sector.
SouthPAN is notable as the first SBAS globally designed from its inception as a service rather than as a conventional turnkey system. This service-oriented approach enables scalability and potential expansion into other regions, while establishing clear customer-provider interactions governed by service-level agreements (SLAs) and adherence to defined key performance indicators (KPIs).
Early open services have been provided since September 2022, demonstrating immediate benefits to users across Australasia. Moving forward, the SouthPAN service will fully deliver safety‑of-life L1 SBAS critical for aviation operations, significantly enhancing flight safety through precise runway approaches and superior navigation accuracy.
Additionally, SouthPAN has integrated cutting-edge dual-frequency multi-constellation (DFMC) SBAS and precise point positioning (PPP) through SBAS as open services available to diverse users, including the agriculture, maritime, rail, road transport and geomatics sectors. The DFMC SBAS capability is designed to support an effortless transition to future safety-of-life services through engineering updates and software modifications, without necessitating costly hardware replacements.
GMV is responsible for two core elements of the SouthPAN project: the Corrections Processing Facility (CPF) and the Ground Control Center (GCC). These facilities will ensure that SouthPAN consistently meets stringent performance benchmarks by generating precise corrections for navigation signals and promptly identifying and reporting anomalies critical for safety-of-life aviation services. GMV also leads the navigation performance engineering activities and continuous performance monitoring, ensuring the system reliably fulfills its specified operational criteria.
The European Geostationary Navigation Overlay Service (EGNOS), Europe’s regional satellite-based augmentation system (SBAS), has added Safety of Life Assisted Service (ESMAS) for maritime users.
Designed to complement ground-based augmented signals, ESMAS aims to add a layer of protection against GNSS signal errors while increasing signal accuracy and ensuring integrity.
While GNSS remains the primary means of obtaining positioning, navigation and timing (PNT) information while at sea, users in the maritime realm generally employ augmentation services provided by ground-based technologies such as Differential Global Navigation Satellite System (DGNSS), which correct GNSS errors to provide more accurate positioning information.
ESMAS is delivered via existing EGNOS space-based and ground-based facilities and does not require any additional infrastructure. It is well-positioned to support navigation on the open sea and in coastal waters, covering harbor approaches and entrances.
ESMAS is provided openly and is accessible without any direct charge. It is available via all satellite-based augmentation system (SBAS) enabled GNSS receivers developed following International Electrotechnical Commission (IEC) standards. With such a receiver, users can navigate with increased accuracy and get GNSS error warnings.
EGNOS also interfaces with NAVAREA coordinators to provide timely maritime safety information (MSI), including navigation warnings and other urgent safety-related messages that are broadcast to ships through conventional channels.
According to Rodrigo da CostaDa Costa, EUSPA executive director, ESMAS is targeted towards aiding merchant vessels, but it is also available to all other SOLAS-conforming vessels from EU Member member States states and EGNOS contributing countries, including Iceland, Norway and Switzerland. Unlike other EGNOS services — which are delivered by European Satellite Services Provider (ESSP) under contract with EUSPA, ESMAS is to be delivered directly by EUSPA.
The Radio Technical Commission for Aeronautics (RTCA) has released a six-file document titled “DO-401 Minimum Operational Performance Standards (MOPS) for Dual-Frequency Multi-Constellation Satellite-Based Augmentation System Airborne Equipment.”
The document is designed to support validation of airborne requirements when using dual-frequency GPS, Galileo and satellite-based augmentation system (SBAS) signals as defined by International Civil Aviation Organization Standards and Recommended Practices (Annex 10, Volume I, Amendment 93), as well as the development of dual-frequency multi-constellation SBAS services.
The SBAS MOPs document does not provide specifications for a production approval.
The RCTA stated that a future release of the document will provide requirements supporting production approval, typically through a new Technical Standard Order or European Technical Standard Order.
The Australian and New Zealand governments, with support from FrontierSI, are conducting a survey with original equipment manufacturers (OEMs) to identify the opportunities and barriers for integrating Southern Positioning Augmentation Network (SouthPAN) signal support in GNSS chips, devices and equipment.
SouthPAN is a Satellite-Based Augmentation System (SBAS) in the Southern Hemisphere and provides improved positioning and navigation services in Australia, New Zealand and maritime regions.
Precise positioning from the network offers improved accuracy down to 10 cm. SouthPAN provides augmented and corrected satellite navigation signals directly from the satellite rather than through a mobile phone, providing accuracy that overcomes gaps in mobile internet and radio communications.
SouthPAN early Open Services has been live since September 2022, and aviation safety-of-life certified SouthPAN services are set to go live in 2028. Safety-of-life certified services are designed to support end users engaging in life risking operations, such as landing an aircraft at an airport.
OEMs of positioning and/or navigation service equipment are asked to share insights on the support of SouthPAN’s three services into chips, devices and equipment. In particular, the company is looking for OEM’s’ views on barriers and opportunities for support of the L1, dual frequency multi-constellation (DFMC) and precise point positioning (PPP) via SouthPAN services.
The information provided will assist Geoscience Australia (GA) and Toitū Te Whenua Land Information New Zealand (LINZ) to maximize SouthPAN ‘s full potential and benefits.
Click here to access the survey. Responses will be accepted until Sept. 30, 2023.
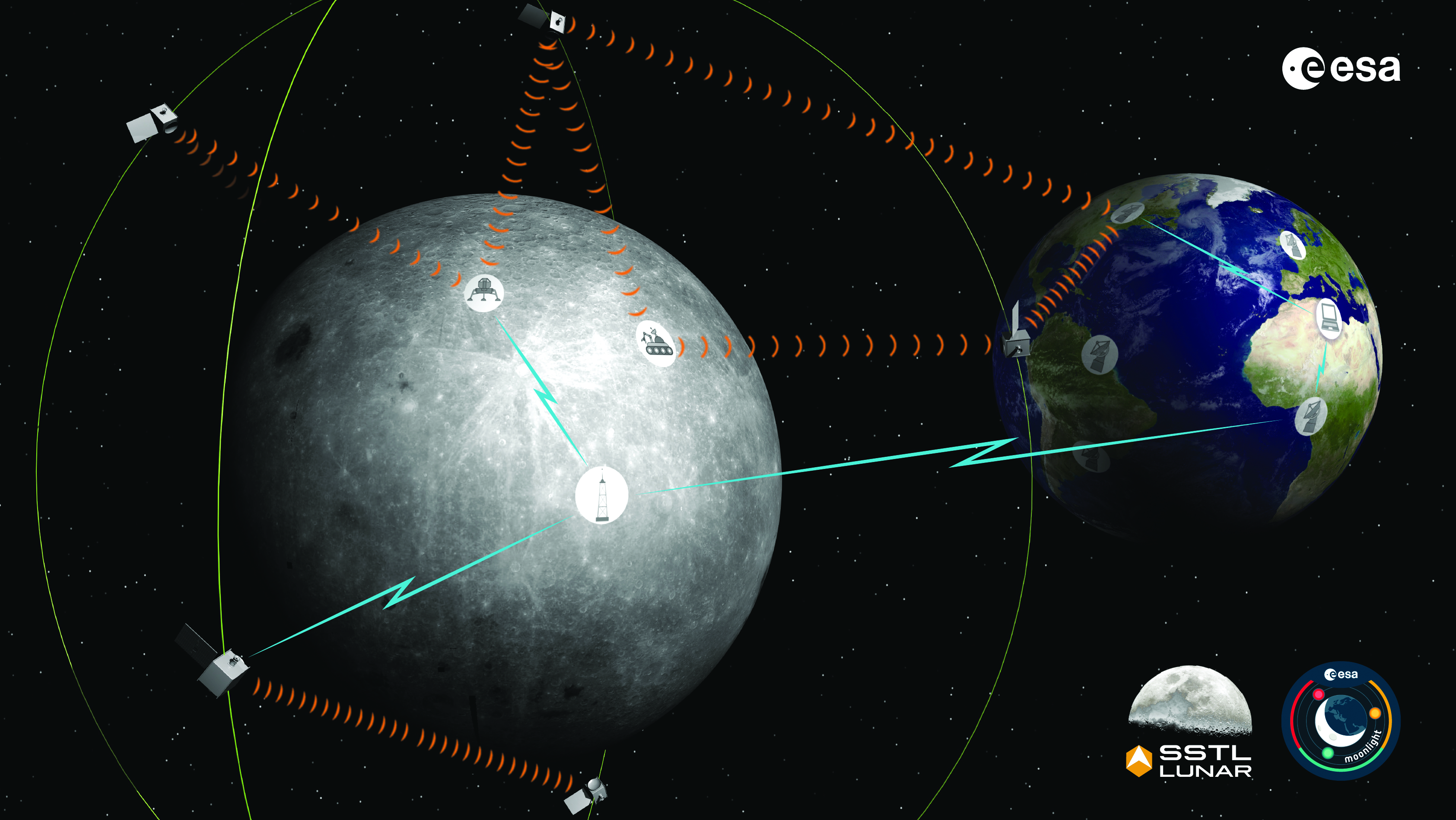
The Moonlight initiative will provide sustainable lunar data-relay services for communication and navigation around the Moon. (ESA Moonlight Study conceptual drawing.) (Image: SSTL/Airbus/ESA)
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23 in Denver, Colorado, and virtually. The following five papers focused on lunar and space applications. The papers are available now.
MTO Navigation Using Lunar Signals
The moon transfer orbit (MTO) is becoming increasingly important as several national space agencies are planning moon exploration soon, with projects such as NASA’s Artemis. In previous research, the GPS navigation accuracy on the MTO reached 200 m at the moon altitude by using GPS signals emitted from the far side of Earth. As accuracy on a low-Earth orbit (LEO) using GPS is a few meters, 200 m accuracy is not accurate enough to support lunar exploration. The deterioration of accuracy is due to the poor geometry of the GPS satellites that became visible from the MTO.
The authors want to achieve an accuracy of less than 100 m in MTO by using other navigation sources, including the lunar navigation satellite system (LNSS) to be deployed in the moon’s orbit. The LNSS signals will come from the far side of the moon, similar to the signals of GPS satellites coming from the opposite side of Earth. Its satellites will be pointed towards the moon to provide positioning, navigation and timing services on the moon surface, especially at the lunar South Pole region
The researchers have been conducting the simulation evaluation for the MTO navigation accuracy using signals coming from the moon and assume that these signals will be emitted from beacons on the moon surface or the LNSS.
Murata, Masaya; Kogure, Satoshi; “Moon Transfer Orbit Navigation Using Signals Coming from the Moon.”
Designing the Smallsat-Based LNCSS
There is growing interest in the use of a smallsat platform for the future lunar navigation and communication satellite system (LNCSS); however, many design considerations are not finalized for the smallsat-based LNCSS, such as choice of the satellite clock, satellite orbital parameters and the constellation size.
Using the Systems Tool Kit simulation software, the authors examined various LNCSS constellation case studies based in elliptical lunar frozen orbit and with a low-grade chip-scale atomic clock.
They evaluated case studies of navigation design considerations including position and timing accuracy, lunar user equivalent ranging error, and dilution of precision. As for case studies of communications design considerations, the authors examined daily data volume, availability and data rate. Finally, they examined smallsat factors including the cost, size, weight and power of the satellite payload.
The paper includes trade-off analysis in satisfying the preliminary design criteria outlined by international space agencies and commercial space companies.
Bhamidipati, Sriramya; Mina, Tara; Sanchez, Alana; Gao, Grace; “A Lunar Navigation and Communication Satellite System with Earth-GPS Time Transfer: Design and Performance Considerations.”
Developing an SDR for Space
A geostationary satellite (GEO) equipped with the satellite-based augmentation system (SBAS) function has a transmitter for GNSS correction signals at the L1 and L5 bands. This transmitter could interfere with the GNSS space service volume (SSV) receiver in the same satellite, so L1 and L5 signals cannot be used for the GEO SBAS satellite. However, the use of GPS L2C signals can be an alternative.
The authors of this paper present the development of a GPS L2C signal generator for the SSV in GEO simulation. They present the simulation process for GEO satellites and the structure of the GPS L2C signal generator.
In this study, a verification through the receiver test with a GNSS software-defined receiver is included to show the possibility of the designed signal simulator. The validation is performed by analyzing the programmable system device, the results of the acquisition, code/carrier tracking, and the C/N0 estimation.
Lee, Hak-beom; Choi, ByeongHyun; Song, Young-Jin; Won, Jong-Hoon; Kwon, Ki-Ho; “Development of GPS L2C Signal Generator for SSV in Geostationary Orbit Simulation.”
Differential Positioning on the Moon
This paper introduces a new concept of delivering the pseudorange correction calculated at a reference station on the lunar surface, as a part of the lunar navigation satellite system (LNSS) navigation message. The concept enables LNSS users to apply differential positioning using pseudorange correction without adding new hardware to their receivers.
The authors propose the differential positioning technique to reduce the signal-in-space range error of LNSS satellites and the coordinate transformation errors from Earth-centered fixed frame to lunar reference frame — the dominant errors in satellite positioning by LNSS.
The proposed reference station is equipped with instruments to externally estimate its own position relative to the lunar reference frame. The user on the lunar surface would then perform differential positioning using the station coordinate and pseudorange correction obtained at the reference station.
In this study, the simulation results using eight elliptical lunar frozen orbit satellites show that the real-mean-squared values for both horizontal and vertical positioning errors with differential correction are reduced to 1/10 of those without differential correction, even at 10 degrees latitude from the reference station at the lunar South Pole.
Akiyama, Kyohei; Murata, Masaya; Kogure, Satoshi; “Differential Positioning Performance on Lunar South Pole Region Using Lunar Navigation Satellite System.”
GEO Precise Orbit Determination
Using GPS in satellites in geostationary (GEO) orbits provides advantages by improving position, velocity and timing data, reducing operating costs and providing autonomous orbit control for station keeping. This paper presents the result of the onboard data evaluation and precise orbit determination of an optical data-relay satellite (ODRS) using GPS L1 C/A code and carrier-phase observations for 74 days.
As a result of precise orbit determination, the authors found that both code- and carrier-phase observations are affected by the ionospheric delay when signals pass through the plasmasphere located above the ionosphere.
Several methods were implemented during this research to reduce the effect of the plasmasphere, including setting a higher cut-off altitude, applying correction sequences generated from orbit determination residuals, and applying a new observation noise model depending on the GPS off-nadir angle. Results show that the correction sequences and the new noise model improve the internal orbit consistency. The authors also found that the orbit bias in radial direction due to negatively biased carrier-phase observations is mitigated from –51 cm to –17 cm by setting a higher cut-off altitude and applying correction sequences.
Matsumoto, Takehiro; Sakamoto, Takushi; Yoshikawa, Kazuhiro; Kasho, Sachiyo; Nakajima, Ayano; Nakamura, Shinichi; “GEO Precise Orbit Determination Using Onboard GPS Carrier Phase Observations of Optical Data Relay Satellite.”
What would be required for the United States to develop and deploy a GPS high-accuracy service analogous to Galileo’s HAS?
Ismael Colomina
“Galileo HAS is a particular implementation of a PPP-RTK service. U.S. companies are already providing similar fee-based services that are even more accurate than HAS. Therefore, there is no big technical challenge for the United States to provide a GPS HAS. Actually, the European Union already provides a HAS for GPS. It is more a question of strategy for GPS policy makers: which user segment to service with a HAS-like augmentation? What about other services analogous to Galileo’s OSNMA and the upcoming CAS [commercial authentication service] for resiliency purposes? In short, a HAS-like service would just require including it in the U.S. GNSS evolution roadmap.”
— Ismael Colomina GeoNumerics
John Fischer
“The challenge is probably more political than technical. The U.S. government usually refrains from competing with commercial services. The prevailing attitude in the United States is that the private sector is more efficient than the public sector. Maybe the most practical approach is for the government to provide the authentication mechanism and open access to the data required, then allow the private sector to offer services. There isn’t a pressing need for high-accuracy GPS for transportation — it needs resiliency/reliability. However, precision agriculture needs it, so maybe sponsorship from the Department of Agriculture would be more effective than from the Department of Transportation.”
— John Fischer Orolia
Mitch Narins
“When I saw this question, my first impression (as a systems engineer) was to ask ‘For whom? For what applications? For which services?’ (Positioning? Navigating? Time/frequency?) Many have concentrated on accuracy, competing in a GNSS Olympics to see who can achieve ‘the best’ position accuracy and precision (repeatability). Finally, (thanks to Logan Scott) integrity is being pushed beyond just SBAS and GBAS, and real civil authentication of signals is being pursued. I can promise nanometers/nanoseconds if I don’t have to prove it’s true. While we finally understand the need for zero trust, we must still address loss of service by establishing real complementary PNT.”
Douglas County Public Works needed a GNSS rover to support its UAS operations. The pay-as-you-go option was appealing as they only needed high-precision a few times per month. (Image: Jason Schilling)
High precision GNSS rovers play a vital role in a broad variety of field surveying and mapping applications. Different users have different value propositions in mind when choosing field hardware and software: expected precision, sources of corrections, configurations for specific workflows, and, of course, cost. Weighing these many considerations, GNSS manufacturers have come up with portfolios of multiple models to fill these varied needs.
That said, GNSS manufacturer Bad Elf took a different approach when it designed its flagship rover, the Bad Elf Flex. The Flex is designed to meet the cost-precision-workflow needs of everyone, from asset mappers to surveyors. (Hence the name “Flex.”) To inform the design of the Flex, Bad Elf listened to field users who wished for a scalable solution in a single rover, rather than having to buy multiple different models, and without breaking the bank.
Options for the Infrequent User
“I had one of the little Bad Elf GNSS surveyor handhelds for many years,” said Jason Schilling, wildlife biologist with Douglas County Public Utility District in central Washington State. “That worked great for rough mapping, between a foot and a meter of precision, and I could connect it via Bluetooth to mapping software on my mobile.”
But this all changed when Schilling began an unmanned aerial system (UAS) program for the utility several years ago.
“I really needed survey-level precision for ground control points to geolocate the images from the UAS,” said Schilling.
He was aware of the high cost of centimeter-precision-capable surveying rovers and it was too big of an investment, considering that he only did UAS mapping a few times a month. As an existing Bad Elf customer on the company mailing list, Schilling learned about the new Flex rover, which offered multiple options, and he found one that seemed quite enticing for the needs of his utility.
Schilling purchased a Flex Standard bundle at a low base price, about $3,000, with the pay-as-you-go plan for high precision. In the standard configuration, the Flex is capable of autonomous positioning (1–5 m), and mapping grade (sub-meter precisions) via free satellite-based augmentation services (SBAS), such as WAAS. But when the user activates a pre-purchased “token,” the full centimeter-precision capability, using external corrections, is enabled.
“On the day of a UAS survey, we turn it on, activate a token from our account, and then we have 24 hours of high precision,” Schilling said. “It costs us $25 per day.”
For two to three UAS surveys a month, this works out to far less over many years than the cost of buying a typical surveying rover.
Correction Sources
For real-time kinematic (RTK) corrections, Schilling connects via NTRIP to the statewide cooperative real-time network (RTN); sometimes in a network RTK mode (such as VRS) or single-base RTK to a nearby reference station on the same network. The Flex accommodates NTRIP connections to RTN or IP-enabled reference stations, but Bad Elf has added even more flexibility for corrections.
In some scenarios there is no access to an RTN or no cell service (needed for NTRIP access). One option in these cases is to add a second Flex, set it up as an RTK base, and connect the base and rover via radios that Bad Elf offers.
Bad Elf has added other options for corrections: the Bad Elf RTK service taps into a nationwide real-time network operated by Point One Navigation. This is accessible via NTRIP in the same manner as regional, state or local RTN, and is offered for a monthly fee. In addition, for situations where there is no RTN or cell service, a global precise point positioning (PPP) service (Atlas) can be enabled on the Flex.
PPP differs from RTK/RTN in that it does not need the dense arrays of reference stations, or cell service to access. Instead, PPP derives very precise clock and orbit data from a global array of tracking stations and delivers this to the Flex via geostationary satellites. After a short convergence time, PPP from the Atlas service will yield 5 –10 cm precision over most of the globe.
The Full Boat
Full Configuration. Brian Cortese works for the City of Ellensburg, where he uses the FLEX Extreme Bundle for multiple field applications. (Image: Brian Cortese)
The City of Ellensburg, a college town and farming community in central Washington State, chose the Flex Extreme bundle for about $6,000 — the “full boat” configuration. The Extreme bundle enables all the add-on services all the time, eliminating the need for tokens. In their case, the frequency of use made the higher initial investment worthwhile.
“We have big plans for our rovers,” said Brian Cortese, Engineering Tech/Inspector for the City of Ellensburg Public Works & Utilities.
Ellensburg is a vibrant town that is attracting a lot of new development and it is being proactive in surveying and mapping assets as they are added or replaced.
“We’re recording manholes and valves, sewer systems, storm water systems, irrigation, hydrants — everything that gets built in the city gets as-built surveyed,” Cortese said. “Precise, real-time positioning, it’s been a benefit to us already. We can go out before they work on the subgrade for new developments and take measurements, and then when they finish the subgrade and pave it, we can go back and locate those exact positions.”
Ellensburg uses corrections from the statewide cooperative RTN. In fact, one of the RTN reference stations —also part of the NOAA National CORS Network — is right in the center of town atop the science building of Central Washington University. While the city does a wide variety of surveying and mapping, with the Flex and RTN corrections surveyors get the same centimeter-precision for everything they measure in the field.
“We’ve done design projects with it,” Cortese said. “For instance, we recently took measurements in an area of downtown for a proposal by recording positions and elevations to develop a new park and entertainment area for the community. We are also marking Americans with Disabilities Act (ADA) ramps to meet federal specs out in the field — it’s been really handy for so many things.”
Survey-Grade Rover
To serve the full range of precision needs, the Flex had to be designed as a survey-grade rover. It has a full-constellation GNSS and RTK engine: GPS, GLONASS, Galileo, BeiDou, and support for other regional constellations. With more satellites in view, it can perform in sky-view-challenged locations, such as around buildings and under tree canopy.
“Ellensburg is on the Tree City, USA list; our streets are very well lined with a variety of trees, which is also where a lot of our utilities are and development is going on,” Cortese said. “We have been able to get good precisions in and around those trees. Actually, someone on our staff is taking an inventory of the trees with the Flex and loading the data directly into ArcGIS.”
Even in the more rural areas of Grant County that enjoy a lot of open sky, Schilling said, some areas planned for mapping are along upper tributaries and in the hills with a lot of tree coverage. He said the Flex has performed well in those areas.
Choices
The Flex offers these options and combinations:
Flex Extreme. Full survey-grade rover that can use a variety of correction types.
Base-Rover RTK. Two Flex Extreme units connected via radio.
External RTN/RTK corrections via NTRIP.
Bad Elf RTK Service. Single-tap access to a nationwide RTK corrections service.
PPP service. Atlas PPP corrections via L-band geostationary satellites.
Flex Standard. Pay-as-you-go high-precision-enabled service using tokens.
Static Logging. Observation file logging for post-processing (supported by Flex Extreme).
Compatibility with multiple field-mapping software applications.
While many modern GNSS rover systems support one or more options similar to those listed above, Bad Elf’s Flex supports all of them, making it capable of a wide variety of applications.