In my January 2026 GPS World newsletter, I noted that the National Geodetic Survey (NGS) convened the Federal Geodetic Control Subcommittee (FGCS) meeting with federal geospatial agencies to boost awareness and align efforts on National Spatial Reference System (NSRS) Modernization government-wide. Key steps include cultivating internal champions to champion the initiative, distilling complex topics for clear leadership briefings, and bringing together agencies, partners, and industry to collaboratively shape solutions. I also highlighted that on Feb. 17-18, NGS staff would be participating in Geo Week 2026 in Denver to engage geospatial product and service users and further coordinate on the modernization. NGS gave several presentations during GeoWeek that addressed many of my questions on the new modernized NSRS. This newsletter will highlight some of NGS’s presentations.
First, a special shout-out to my dear friend and former colleague, Juliana Blackwell, retired Director of the National Geodetic Survey. NOAA’s Table Mountain Gravity Observatory in Boulder, Colorado — long known for its absolute gravity work — has been officially renamed the J. P. Blackwell Gravity Observatory. This well-earned tribute honors her outstanding dedication and visionary leadership at NGS. Congratulations, Juliana!

NGS employees participated in the following sessions and meetings during GeoWeek 2026:
- ASPRS NSRS Modernization Working Group Meeting
- NSRS Modernization — The Latest Technical Updates
- Preparing to Put the Modernized National Spatial Reference System into Practice
- Roundtable — NSRS Modernization and Professional Societies
As President of the American Association for Geodetic Surveying (AAGS), I participated in the session titled “Roundtable – NSRS Modernization and Professional Societies.” Dana J Caccamise II, NGS regional geodetic advisor, opened our session by describing the NGS Modernization Engagement Plan and Progress. As I mentioned last month, Dana should get an award for the material he has prepared and for his work assisting agencies and professional organizations in preparing for the new NSRS. I highlighted Caccamise’s work in my October 2025 GPS World newsletter.
All the NGS sessions provided the latest information on activities associated with NGS’s NSRS Modernization. Here are the specific questions I had going into the session, along with the clear answers provided by NGS personnel during their presentations and the follow-up Q&A:
What NGS products and services will be available when federal agencies officially adopt the new NSRS?
When the modernized NSRS is officially adopted (following FGCS approval and the transition to it becoming “the NSRS”), NGS will make available a full suite of updated tools, data access points, and services built around the new reference frames (e.g., NATRF2022 and variants), the North American-Pacific Geopotential Datum of 2022 (NAPGD2022), the State Plane Coordinate System of 2022 (SPCS2022), and associated geopotential models like GEOID2022. Key products expected to be operational and official include:
- NCAT
- NGS Maps
- Geodetic Station Page
- CORS
- Geodetic Mark Page
- Passive Marks
- OPUS–Static 5.2
- OPUS-Share
What NGS products and services will NOT be available when federal agencies officially adopt the new NSRS?
Upon official adoption of the modernized NSRS — after FGCS approval and the shift to the new system becoming “the NSRS” — several current products and services will no longer be part of the official modernized NSRS or will be discontinued in their present form. Key items not included or no longer supported in the modernized NSRS release include:
- OPUS Projects 5 will not be supported
- OPUS-Rapid Static (OPUS-RS) will not be supported (modernized OPUS-Static 5.2 is expected to handle a broader range of observations)
- OPUS 6.0 and OPUS 6.1 will not be available
What GNSS data will be included in the first iteration of the computation of Reference Epoch Coordinates (REC) for marks?
At Geo Week 2026, NGS stated that its plans include providing Reference Epoch Coordinates (RECs) for certain legacy GNSS projects. Specifically, this includes:
- GPS projects that were originally processed and published under the NAD 83 (2011) realization, and
- Other GNSS projects will be officially published by NGS through the end of 2025\
After the first iteration of Reference Epoch Coordinates, is NGS planning to perform future adjustments to determine REC and SEC of new marks? If so, what process will be used to establish RECs on new marks?
Yes, NGS plans include performing future adjustments to compute Reference Epoch Coordinates (REC) for new marks. However, at this time, no final decision has been made on how often this will be performed.
Has NGS changed how users need to submit data to incorporate leveling data into NAPDG2022?
Yes, NGS has introduced changes to better integrate leveling data (differential height differences) into the modernized NSRS for computing orthometric Reference Epoch Coordinates (RECs) in NAPGD2022 (epoch 2020.00).
As documented in Blueprint Document 3, when performing leveling projects, users will also be required to occupy a number of primary marks with GNSS.
OPUS 6.1 is built for future expansion to support other geodetic measurements (classical, leveling)-no timeframe was given for this.
Is NGS planning to officially adopt the new NSRS before users can submit data to NGS for technical review and publication in the NGS database?
Yes, that is what NGS is saying at this moment (February 2026). OPUS Project 5 will not be supported and OPUS 6.1 will not be operational when the new NSRS is officially adopted.NGS is working on the OPUS 6 application and is trying to “minimize any gap in service.”
Is NGS recommending using the OPUS-Share utility until users can submit data to NGS for technical review and publication in NGS database?
Yes, that is what NGS is recommending at this moment (February 2026).
This is also stated in NGS’s Track Our Progress Webpage.
OPUS-Projects 5 will not be included in the modernized NSRS. Instead, NGS will focus on both developing an improved software suite for OPUS, known as OPUS 6.0 and OPUS 6.1, and minimizing any gap in service in which the current OPUS-Projects functionality is not available for users to organize, process, adjust, and submit high-accuracy GPS surveys for use by NGS in expanding and improving the NSRS. As noted above, OPUS-Share will remain available as a means to submit data to NGS.
When will OPUS 6.1 be available for users to submit data to NGS for technical review and publication in NGS database? Is it weeks away, months away, or years away?
NGS has not announced an official completion or release date for OPUS 6.0 and OPUS 6.1. However, they have indicated that active development is underway on this enhanced OPUS tool suite. It’s not imminent— meaning not expected within several months—but it’s also not a distant, multi-year project.
NGS is working on the application and is trying to “minimize any gap in service.”
The NGS’s Track Our Progress Webpage states:
“OPUS-Projects 5 will not be included in the modernized NSRS. Instead, NGS will focus on both developing an improved software suite for OPUS, known as OPUS 6, and minimizing any gap in service in which the current OPUS-Projects functionality is not available for users to organize, process, adjust, and submit high-accuracy GPS surveys for use by NGS in expanding and improving the NSRS. As noted above, OPUS-Share will remain available as a means to submit data to NGS.”
What’s the cut-off date for users to submit projects via OPUS Project 5 so the data can be part of future computations of RECs?
Current OPUS-Projects 5 is going to be supported until adoption of the new NSRS, with a deadline announced at least 6 months in advance.
The NGS’s Track Our Progress Webpage states
“Note: the current OPUS Projects 5 software will be supported until the modernized system is adopted, and a deadline for OPUS-Projects users to submit their surveys for publication will be announced with at least six months’ notice.”
In the session “NSRS Modernization – The Latest Technical Updates,” the National Geodetic Survey (NGS) presented slides detailing the status and upcoming tasks for the modernized National Spatial Reference System (NSRS). Key highlights from the presentation are summarized below.
For the source of these slides and additional context, refer to the “Updates from the National Geodetic Survey at GeoWeek 2026” box. NGS posts their presentations at here: https://geodesy.noaa.gov/web/science_edu/presentations_library/.
Updates from the National Geodetic Survey at GeoWeek 2026
(Selected Slides from the following presentations)
- 2026 GeoWeek – NSRS Modernization – The Latest Technical Updates: The Why and How of NSRS mod – February 17, 2026 – Dru Smith
- 2026 GeoWeek – Managing Modernization Rollout – February 17, 2026 – Seth Pollack
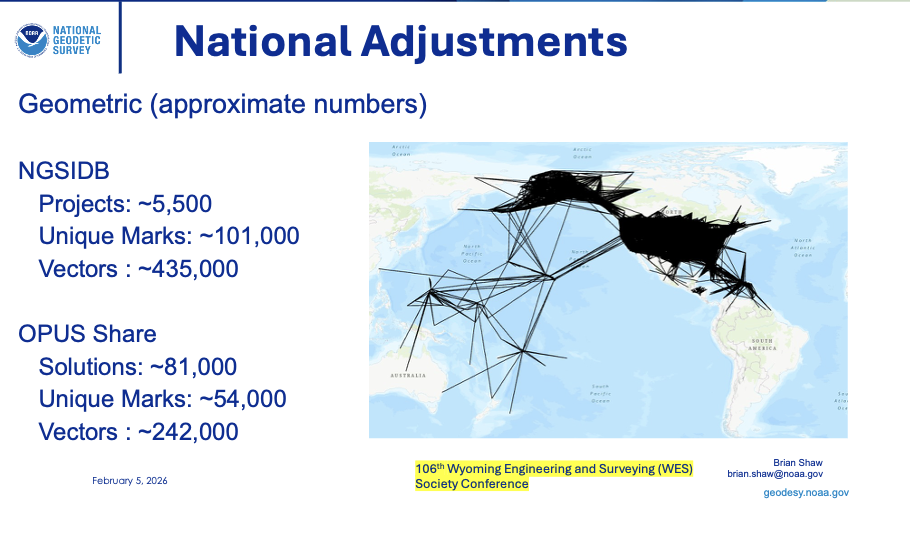
- 106th Wyoming Engineering and Surveying (WES) Society Conference – February 5, 2026 – Brian Shaw
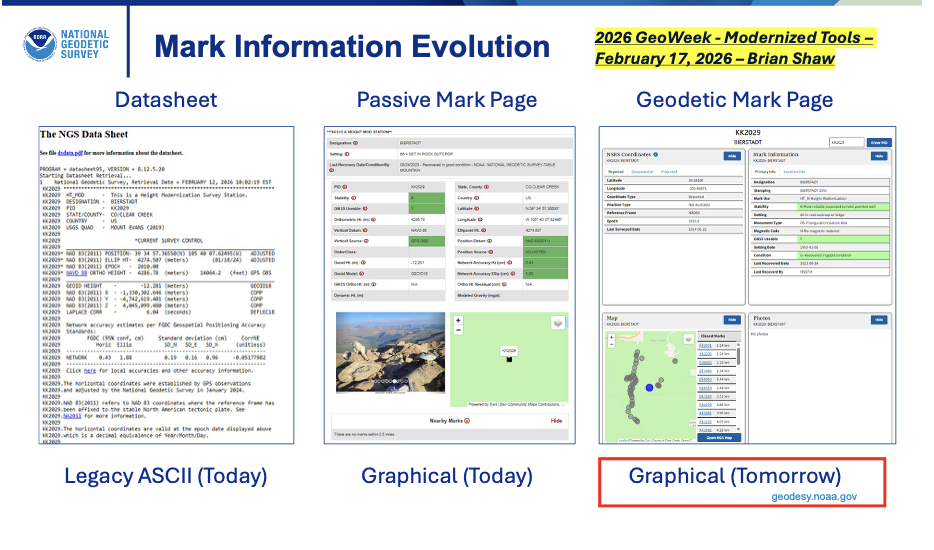
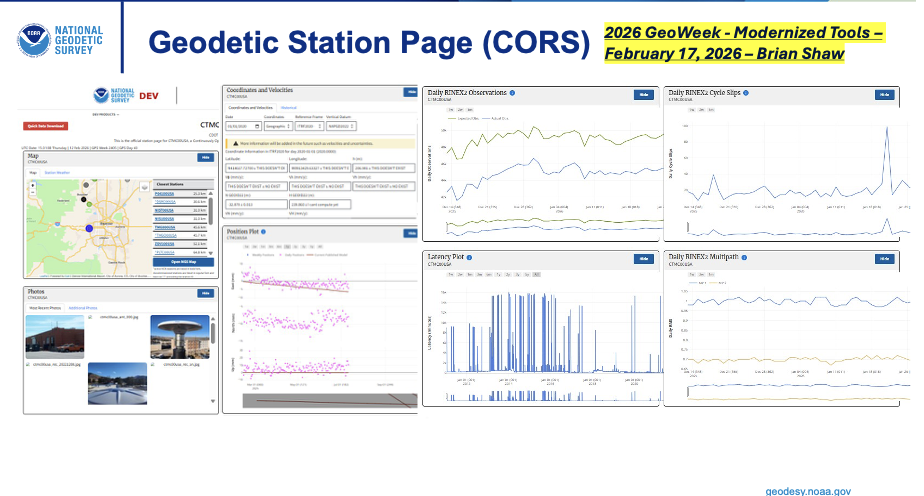
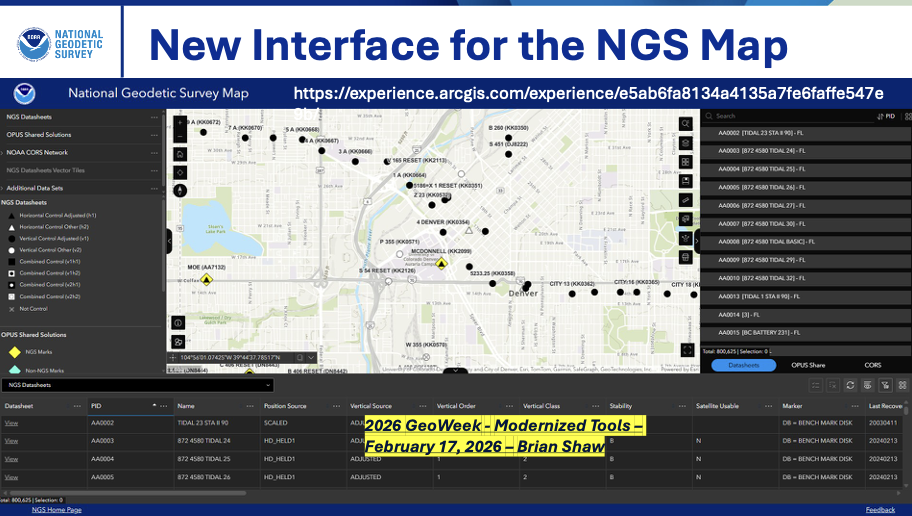
- 2026 GeoWeek – Modernized Tools – February 17, 2026 – Brian Shaw
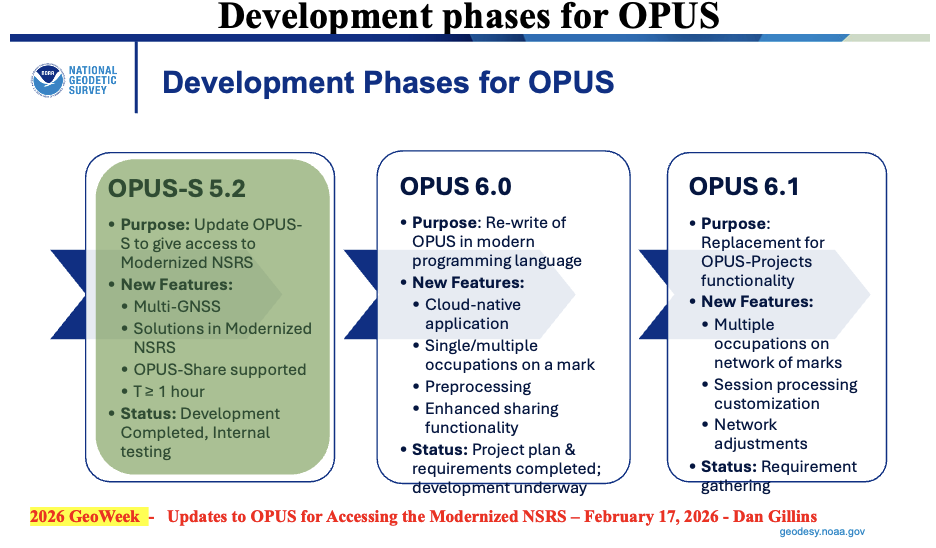
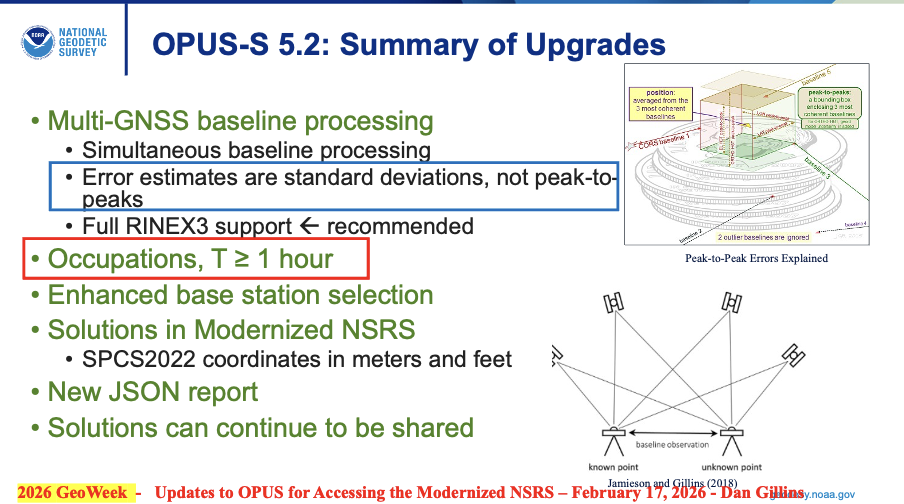
2026 GeoWeek – Updates to OPUS for Accessing the Modernized NSRS – February 17, 2026 – Dan Gillins
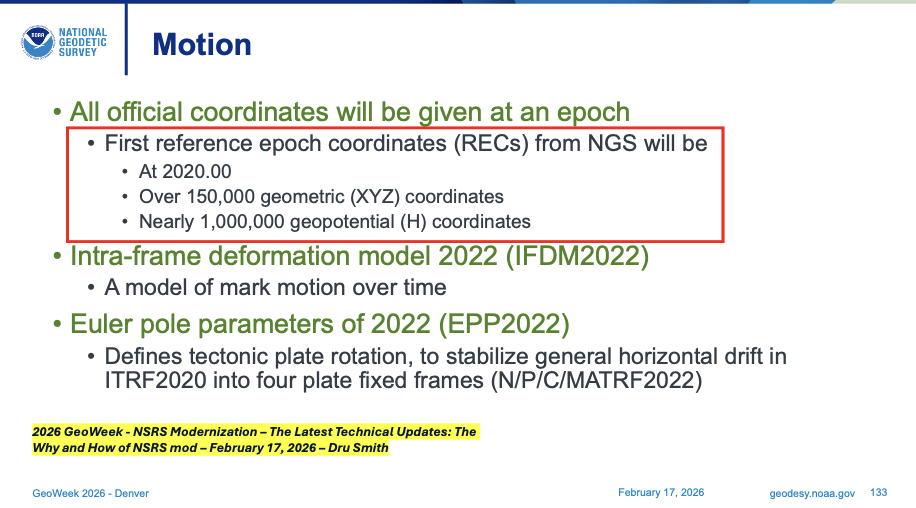
During Dru Smith’s presentation, he mentioned what will be included in the first iteration of the computation of Reference Epoch Coordinates (REC) for marks. The slide states that more than 150,000 geometric (XYZ) coordinates and 1 million geopotential coordinates (that is, orthometric heights) will get reference epoch coordinates (REC), epoch 2020.00. These will include data from NGS Integrated Database and from the OPUS Share database.
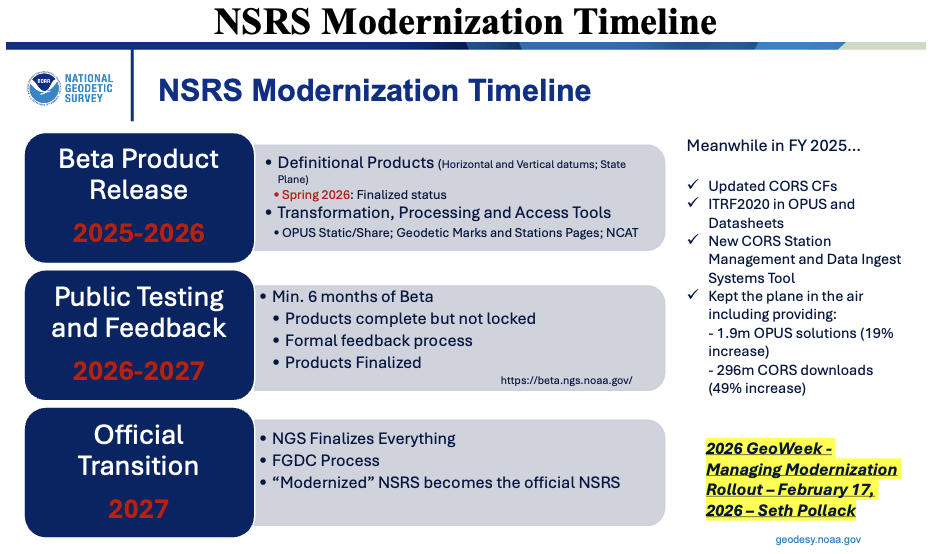
In the GeoWeek 2026 presentation by Seth Pollack (from NOAA’s National Geodetic Survey), a slide outlined the NSRS modernization timeline.
As detailed in the slide and consistent with NGS’s official rollout plan:
- Beta products are currently being released incrementally on the beta site for public testing and feedback. This phased rollout began with initial beta releases in 2025 (following alpha in 2024) and continues through 2026, covering key components such as NAPGD2022, GEOID2022, SPCS2022, enhanced NCAT transformation tools, OPUS-Static updates, and forthcoming Data Delivery System features.
- Each beta component, once released, undergoes public testing and stakeholder feedback, with overall testing continuing for at least 6 months after the final component is made available on the beta site.
- Following sufficient testing—once all components appear stable and NGS has incorporated feedback—the Federal Geodetic Control Subcommittee (FGCS) will vote to recommend approval of the modernized NSRS. This vote is anticipated in late 2026 or early 2027.
- Upon FGCS approval (and subsequent Federal Geographic Data Committee (FGDC) endorsement), NGS will probably publish a Federal Register Notice announcing the adoption. At that point, the modernized NSRS becomes the official National Spatial Reference System, replacing the legacy system (NAD 83 realizations, NAVD 88, etc.).
- While earlier NGS documentation targeted adoption likely in mid-to-late 2026 (post-FGCS vote), recent updates from GeoWeek 2026 sessions and related reports indicate the full official adoption and transition may extend into the first part of 2027, accounting for final testing, FGCS/FGDC processes, Federal Register steps, and a smooth handover to avoid disruptions.
- The current NSRS remains official throughout this period. Users are encouraged to test beta products now and provide feedback to help refine the system.
Brian Shaw, NGS’s expert on GIS products and services, presented key updates on how users will access geodetic data in the modernized National Spatial Reference System (NSRS).
He emphasized the introduction of a revamped Data Delivery System (DDS), which includes:
- Geodetic Mark Pages — for passive marks. These replace the current ASCII-text datasheets with modernized, user-friendly pages featuring updated Reference Epoch Coordinates (RECs), integrated photos, graphics, maps, project details, and easier navigation.
- Geodetic Station Pages — for active stations like those in the NOAA CORS Network (NCN). These provide updated versions of existing CORS pages, including modernized coordinate functions (e.g., Coordinate Functions or time-dependent positioning info) aligned with the new reference frames (NATRF2022, etc.).
- Additionally, Shaw highlighted a new interface for the NGS Map (the interactive web map application), serving as an enhanced landing page within the DDS. This updated “NGS Map” (replacing or evolving the current version at https://noaa.maps.arcgis.com/apps/webappviewer/index.html?id=190385f9aadb4cf1b0dd8759893032db ) will provide better access to geodetic control data, CORS stations, and other layers, improving visualization and querying for surveyors, GIS professionals, and the public.
- These changes are part of the broader DDS rollout, currently pending beta release (as of February 2026), aimed at making data more accessible, visually rich, and compatible with the modernized NSRS components (e.g., NATRF2022, NAPGD2022, SPCS2022). The DDS landing page will consolidate access, moving away from legacy datasheet formats toward dynamic, web-based delivery.
During Dan Gillins presentation he highlighted that NGS has three development phases for OPUS underway to support the Modernized NSRS:
OPUS-S 5.2: Multi-GNSS with similar functionality as current OPUS-S
- Occupations – one hour or greater
- Standard deviations estimate instead of peak-to-peak values
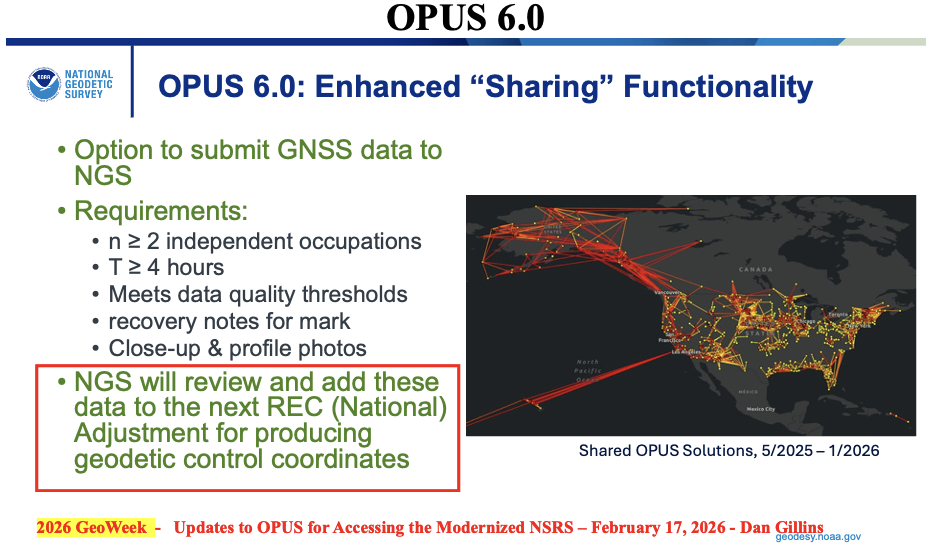
OPUS 6.0: Rewrite of code base in cloud-native application
- single/multiple occupations on a single mark
- enhanced sharing functionality
- Occupation Time – minimum of 4 hours
- NGS will review and add these data to the next reference epoch coordinate (REC) adjustment
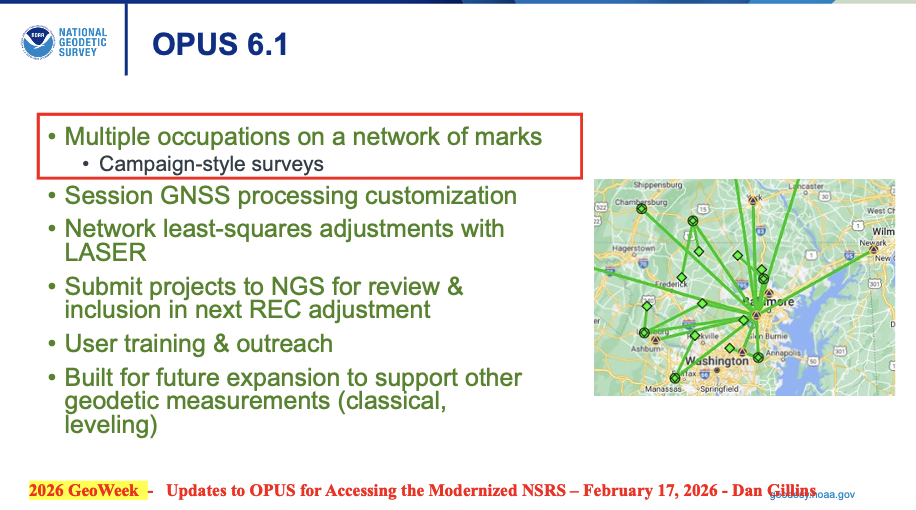
OPUS 6.1: Extension of OPUS 6.0 for multiple marks in a network
- Replace OPUS-Projects functionality
- Multiple occupations on a network of marks (campaign-style surveys)
- Will allow multiple occupations on a single mark – uploads ~10 data files on a mark
- Built for future expansion to support other geodetic measurements (classical, leveling)
I want to emphasize that, in my opinion, NGS is doing a fantastic job with the limited resources that they have. That said, I still have an issue with adopting the new NSRS without having a process for users to submit data to NGS for review, approval, and publication by NGS. This may not be an issue if NGS’s OPUS 6.1 is available soon after the new NSRS is adopted by the Federal Agencies.
My August 2025 GPS World Newsletter discussed the OPUS products under development and, as I mentioned at that time, in my opinion, may be a problem for some users. As I stated in my August newsletter, for the new NSRS to be successfully implemented by users, it is essential that all the necessary software tools are available to enable users to submit projects for review, approval and publication by NGS.
Excerpt from August 2025 GPS World Newsletter
“The NGS News announcement provides a list of products that will be available and a list of products that will not be available when the new NSRS is adopted. Users need to understand what products will not be available after NGS officially adopts the new NSRS so they can determine what that means to their workflow process and client requirements. In my opinion, for the new NSRS to be successfully implemented by users, it is essential that all the necessary software tools are available to enable users to submit projects for review, approval, and publication by NGS. As many of you know, when I worked for NGS, I was the Project Manager of the North American Vertical Datum of 1988 (NAVD 88). That said, from my experience as the NAVD 88 Project Manager, having the appropriate tools available was important for users to implement NAVD 88. As a matter of fact, NGS accepted and processed vertical control data in both NGVD 29 and NAVD 88 for a period to assist users in the implementation of the new vertical reference datum.”
NGS does state that users will be able to submit data through OPUS and OPUS Share to obtain estimates of coordinates in the new NSRS. Unfortunately, using OPUS-Share results that are NOT official NSRS coordinates published by NGS could lead to confusing results and potential lawsuits since NGS does not stand behind the results and recommends NOT using OPUS-Share results for geodetic control.
“This is NGS’s statement on OPUS-Share: Additionally, the popular function of “sharing” your solution with others (colloquially called “OPUS-Share”) will be retained, but with appropriate caveats that the shared solution should not be used as geodetic control. These shared solutions will be available through the geodetic mark pages of the DDS.“
Why should users use OPUS-Share to establish geodetic control when NGS advises against relying on OPUS-Share for establishing geodetic control? OPUS-Share results are not officially submitted to NGS for review, approval, and publication on an NGS Datasheet. I don’t believe this approach will meet the needs of users who require their projects to be reviewed, approved, and published by NGS.
Finally, as someone deeply invested in the geodetic community—having retired from NGS and followed NGS developments closely for years—my overall opinion on the NSRS modernization rollout plan for the remaining products is cautiously positive, but with some genuine concerns that I believe NGS and stakeholders should address head-on to ensure a smoother transition.
The phased beta release approach (starting in 2025 and continuing through 2026) is smart and user focused. Releasing components incrementally on the beta site, allowing at least 6 months of public testing and feedback per major piece (and overall testing extending beyond the final release), shows NGS is prioritizing stability over speed. The emphasis on stakeholder input, FGCS approval (now looking like late 2026 or early 2027), and a multi-month transition to the official site align well with best practices for such a massive shift. It’s encouraging to see private industry partners (e.g., ESRI, Blue Marble) already engaging deeply and planning implementations—success will depend on industry buy-in.
That said, here are my main thoughts and concerns I’d share directly with NGS (perhaps via [email protected], user forums, or upcoming webinars/Q&A sessions):
Timeline uncertainty: Clearer, more frequent milestone updates (beyond the Track Our Progress page) would help manage expectations. For example, monthly or bimonthly “status dashboard” with remaining beta items and projected release windows would be invaluable.
OPUS and processing continuity: The shift away from OPUS-Projects 5 toward OPUS 6 and OPUS-Share is logical for a modern GNSS-centric system, but the lack of a firm end-of-support date for legacy OPUS tools (beyond “at least 6 months’ notice”) creates planning headaches for firms with ongoing projects. NGS should commit to a longer grace period—or ideally a defined parallel support window—for legacy OPUS tools (particularly OPUS-Projects 5) after the official adoption of the modernized NSRS.
Data access and usability in the new DDS: The revamped Geodetic Mark/Station Pages, updated NGS Map interface, and overall Data Delivery System sound promising (more visual, integrated RECs/SECs, photos, etc.), but surveyors rely heavily on reliable, scriptable access (e.g., for bulk queries or automation). If the new web-based system lacks robust APIs or export options comparable to current datasheets/legacy tools, it could hinder efficiency. Beta testers should push hard on this during the 6+ month window.
Transformation tools and legacy data handling: Enhanced web-based tools are key for bridging old-to-new (NAD 83/NAVD 88 to NATRF2022/NAPGD2022), but users need confidence that transformations minimize errors, especially in deformation-prone areas.
Communication and outreach: NGS has improved with webinars, the Presentations Library, and beta feedback channels, and more targeted outreach to state agencies, professional societies (NSPS, AAGS), and software vendors has helped. That said, many in the field still feel “in the dark” about practical impacts—case studies, training resources, and FAQs tailored to common workflows would go far.
In summary, the plan is thoughtful and deliberate, reflecting lessons from past delays. If NGS maintains transparency, incorporates feedback aggressively during beta, and ensures vendor readiness, the modernized NSRS will be a major win for accuracy, sustainability, and GNSS alignment.
I’d encourage anyone reading this (including NGS staff) to test the beta products actively, submit detailed feedback, and participate in forums/Q&As. The community input will make or break the success of this once-in-a-generation update.