Millennial Media, provider of mobile advertising, announced that mMedia, its newest self-service mobile solution, has emerged from private beta to full release.
Within mMedia, developers and advertisers will be able to reach more than 200 million global mobile users via Millennial Media’s advertising platform, according to the company. mMedia complements Millennial Media’s full-service mobile advertising solutions, renowned for their scale across multiple regions of the world.
mMedia allows mobile app developers, franchises, and small or independent businesses to utilize mobile as a strategic piece of their marketing strategy. mMedia campaigns can be set up quickly, and advertisers will have access to a comprehensive dashboard that puts them in control of bids, creative, targeting, and more, the company said.
“mMedia extends our mobile ad platform to developers and advertisers who are looking for a complete self-service solution,” said Chris Brandenburg, Co-Founder and CTO, Millennial Media. “Whether their goals are to monetize an app or to promote a business, the technology behind mMedia helps our developer and advertiser partners unlock the power of mobile and drive results that will scale their businesses.”
In addition to traditional mobile targeting methods, mMedia includes a self-service hyper-local targeting feature. Advertisers can draw a virtual fence around their desired targeting area to deliver zone-based advertising with ease. Once drawn, the advertiser’s ads will reach users within that designated area.
Developers can now access mMedia through the same portal they currently use to monetize their mobile applications and sites.
The Mobile World Congress in Barcelona is getting bigger every year — so much that it’s almost a mini CES that is hard to navigate and find companies…much less big location-based services news. While there were no big jaw-dropping mergers and acquisitions, big product roll-outs and partnerships, this conference will continue to be the main showcase for location companies wishing to establish a presence in Europe.
BARCELONA — It was tough to find out what might be the big deal for the location industry here at the Mobile World Congress, among 67,000 attendees and more than 1,500 exhibitors. Two areas continued to stand out, as they had at the January Consumer Electronics Show: the rise of the connected vehicle and machine-to-machine connections.
An MWC keynote was given by Ford Motor Co.’s chairman Bill Ford (right), who gave long-term strategies for the company, which includes big connected car components. Ford’s Sync, which is already on 4 million cars in the United States since it was launched in 2007, now is available in Europe. The company hopes to have 13 million cars equipped with the connected service by 2015 — 3.5 million of those in Europe.
One of the more significant deals at MWC was Sprint Nextel’s announcement that it will be the strategic wireless partner for Chrysler Group’s Uconnect voice-activated vehicle communications system.
In keeping with the connected theme, GSMA’s Connected House featured such companies as AT&T and Airbiquity that showcased the transfer of connected lifestyle from car to house. Airbiquity demonstrated its products for cloud-based services, mobile phones and application integration into vehicles. The company launched its Application Developer Program at MWC.
TCS Offers Family Locator to Auto Makers for Connected Car Initiatives
TeleCommunication Systems announced at the MWC that it’s incorporating the TCS Family Locator into connected vehicles and is offering it on the iPhone and Android platforms. TCS Family Locator allows users to locate family members’ vehicles through aerial photos or maps to monitor when they arrive or leave specific areas.
TCS was a pioneer in enhanced 911 roll outs, which was the basis of today’s location-based services, said Jay Whitehurst, TCS senior vice president, commercial software group.
The cloud-based Family Locator product is being offered to vehicle manufacturers, telematics service providers, and wireless carriers for connected car initiatives, the company said.
Currently, Family Locator supports BlackBerry and other phones.
For the enterprise market, TCS said its Workforce Locator mobile resource management product now has extended coverage to data cards and any device with a SIM card, which includes mobile Wi-Fi hotspots and tablets.
Also at MWC, TomTom said it partnered with HTC to provide the maps, points of interest, and turn-by-turn directions for a line of HTC smartphones in India. TomTom views India as a growing market, citing a study that forecasts more than 5.2 million smartphones will ship to the country this year.
The HTC deal is TomTom’s first major partnership in India, said Nuno Campos, the company’s vice president of sales and marketing for its licensing division. Campos said that Jocelyn Vigreux, formerly president of TomTom USA, has been consolidating all business units in India to steward the company’s HTC partnership there.
TomTom also announced a partnership with NDrive to deliver maps and other content to its location-based applications. The three-year deal is big for TomTom as NDrive has millions of users worldwide, Campos said.
When asked how TomTom is competing against the Googles of the world, Campos said that the market is big enough to run a profitable mapping business. His only crack at Google was that “they are finding that making maps isn’t easy.”
TomTom, through its joint venture partner AutoNavi Holdings Limited, also announced a seven-year agreement with Qoros Auto, an international automotive corporation. TomTom and AutoNavi will deliver HD Traffic, marking the first real-time traffic customer for the newly expanded joint venture. In 2013 the first cars — aimed at young metropolitan users — will hit the streets in China equipped with HD Traffic, providing drivers with the most accurate, comprehensive, and up-to-date traffic information available.
In other Mobile World Congress news:
Urban Airship said its new Unique Opt-In Report allows users to gain insight in to the numbers of distinct users opting in or out of push notifications. This enables companies to hone mobile messaging strategy based on users’ behavior.
Locaaid rolled out its Global Cell-ID at MWC. This new feature, accessible via Locaid’s Location-as-a-Service (LaaS) platform, allows enterprise mobile developers to acquire carrier-certified, permission-based location on their devices in more than 165 countries around the globe.
American Roamer changed its name to Mosaik Solutions at MWC. Through its partnership with Europa, the company’s Global Coverage Analyzer and CellMaps are marketed in Europe. Mosaik Solutions’ customers include AT&T International, OnStar, and Comcast.
ALK Technologies Inc., which previously charged for its navigation applications, now said its CoPilot GPS is a free app for iPhone, iPad, and Android devices. The company contends that CoPilot is a lot more than Google’s free map service and allows users to search millions of pre-installed points of interest for nearby restaurants, hotels, and gas stations. The company had a booth at MWC and exhibited at Showstoppers, as did Poynt.
Indoor positioning continued to be a big topic to enable LBS markets at the Mobile World Congress. Richard Najarian, Broadcom senior director, business development, said that market is shaping up. The company also showed off its Bluetooth Low Energy modules that enable indoor location positioning.
Some other MWC observations:
Qualcomm had an off-site reception for its indoor positioning partners that included Cisco and others.
The Android room at MWC was huge…with such companies as Glympse participating.
Telmap, now owned by Intel, which has recently said it will invest millions into connected vehicle initiatives, has a strong presence in Europe with many LBS applications.
The company says it’s the No. 1 local content aggregator in Europe, according to Motti Kushner, Telmap’s chief marketing officer.
Neustar, which is partnering with TELUS and other major operators in North America to create mobile services, had a large presence at MWC. The company’s intelligent cloud helps operators to integrate location and messaging, said Gary Zimmerman, Neustar’s director of product marketing.
Some of these applications include geofence, which Neustar works with partner ZOS, to create opt-in mobile campaigns that send offers to subscribers based on their location. The company also offers enhanced location that shows how a brand can personalize location information once a consumer gives consent to participate.
GPS World Partnering with GPS-Wireless
GPS World is the GPS-Wireless (www.gps-wireless.com) conference’s exclusive media partner. GPS World’s Chris Litton will be on site at GPS-Wireless 2012, which is March 21-22 at the Hyatt Regency San Francisco Airport, to discuss why location companies should advertise in the magazine and LBS Insider, which has more than 10,000 worldwide subscribers.
In the public dialogue about mobile privacy concerns, I’ve yet to hear a plea to turn back the clock to when mobile apps were supported by subscription fees. Surprisingly, many consumers don’t understand the devil pact that free services come with a loss of privacy. With the exception of enterprise offerings, subscription fees have shrunk or disappeared for most location-based services. At the Institute for Communication Technology Management at the University of Southern California, Allison Cera of Lucent-Alcatel talked about the intersection of technology and identity. More than half of the people in her study felt they shouldn’t have to provide information about themselves just to get the most out of online services. Among the most connected technology users, the expectation of privacy was lower.
As companies rework privacy agreements, it’s interesting that Cera’s research indicates people prefer a simpler privacy policy that is easier to understand, over one that provides more comprehensive protection. In addition to simplicity, people prefer uniformity. Almost 90 percent want to see Internet and mobile service providers, social networking sites, and search engines all governed by the same laws and regulations regarding the collecting, analyzing, and sharing of online data.
Google knows all? Google has experienced heat from lawmakers and consumers over its efforts to consolidate user privacy standards and share data among its offerings. Google announced plans to connect user data across desktop and mobile services including Google+, Gmail and YouTube. “Our new privacy policy makes clear that, if you’re signed in, we may combine information you’ve provided from one service with information from other services,” blogged Alma Whitten of Google. “In short, we’ll treat you as a single user across all our products, which will mean a simpler, more intuitive Google experience.”
You know where I’ve been. Would consumers exchange transparency into whereabouts and driving behavior for a cheaper insurance premium? TomTom is providing the technology behind a new insurance product, which bases premiums on driving behavior. TomTom has teamed up with insurance broker Motaquote for the launch of Fair Pay Insurance, a product that rewards “good” drivers with lower premiums. Drivers who sign up for Fair Pay receive a TomTom navigation device. They will also have a LINK tracking unit fitted in their vehicles, allowing driver behavior and habits to be monitored by the insurer. This information can also be viewed by the policy-holder in their driver dashboard.
A kick without GPS. Mobile location-based advertising, dependent on geo-locating shoppers, hasn’t ramped up as fast as the industry diviners predicted, but shopkick, a location-based shopping app has gotten traction. The company asserts that it helped drive $110 million of in-store revenue to its retail partners in 2011. shopkick rewards shoppers for walking into stores and interacting with products. The solution is not GPS based, as indoor signals remain problematic. Instead, the shopkick phone app detects its presence in a particular store by “hearing” a signal that is emitted from a store-based device. The store is able to send the shopper a reward that can be redeemed for loot.
Pressure mounts for LightSquared. Sprint has given LightSquared until mid-March to obtain FCC clearance for its LTE network. Recent government tests showed that LightSquared interfered with GPS, even under a new deployment plan that the company promoted as a fix to the issue. Lightsquared’s assertion that GPS receivers are “not entitled to any interference protection whatsoever” is open for public comment at the FCC until March 13. Harbinger Capital, the hedge fund that backs LightSquared, reported a 47% decline in its biggest fund.
Love on the Road. Valentine’s Day was yesterday, and love is in bloom. TomTom undertook a mission to find love on the asphalt by seeking roads in the U.S. that are considered romantically named. Texas was a stand out with 102 miles of romantically named roads. Who would’ve thought that the lone star state was such a softie? The most common romantic road names are Rose Road, Lover’s Lane, Valentine Road, Darling Road and Love Street. TomTom counted roads throughout the U.S. containing the words: Couples, Cupid, Darling, Forget-Me-Not, Kiss, Love, Lover, Romance, Rose, Smooch, Sweetheart, Valentine. Smooch Street?
It’s not a market that will help users find friends or places to eat, but it seems to be one that keeps movin’ along. The government and enterprise market for location-based services seems to be steady, if not growing, as evidenced by nearly 9,000 attendees at the recent Transportation Research Board Annual Meeting in Washington, D.C. Topics included the 20th Anniversary of the government’s intelligent transportation systems program.
WASHINGTON, D.C. — Standing out among the thousands of college professors, scientists and engineers were a core of companies who have made inroads into intelligent transportation systems and other government markets here at the Transportation Research Board Annual Meeting, held January 22-26.
Such companies as TomTom have tried to harness the government market for the past few years with real-time traffic information. The traffic information companies contend that the government market will be big for policy makers, who need detailed support tools to make money-saving decisions for local traffic management programs.
At TRB, TomTom announced a partnership with Delcan Corp. to provide historical traffic data for the Strategic Highway Research Program 2 (SHRP 2). The program is managed by the TRB.
“We’ve been using our real-time traffic information, and our historic products, to work with them on traffic management and planning,” said Nick Cohn, TomTom senior business development manager.
By using GPS-based measurements from the TomTom historical traffic database, Delcan and its partners will develop models for travel time reliability analysis and research as part of the program, the company said. TomTom says its traffic database, which uses traffic measurements, costs less money and is time-saving — compared to survey methods.
Last year at TRB, TomTom announced a partnership with PTV where the company was able to deliver TomTom traffic content, via TomTom Traffic Stats, to its customers in the transportation sector.
20th Anniversary of ITS Well Attended
An introspective session at TRB was the Intelligent Transportation Systems 20th Anniversary, which was attended by industry veterans who were around when the first U.S. Transportation Department directives calling for ITS were issued. Most of the panel members agreed that when ITS was being thrown around as something that may replace Cold War contracting dollars with new markets, no one really tried to predict how technology would shape autos and communication.
While panel members agreed that EZ-Pass was one of the big ITS accomplishments over the last 20 years, some acknowledged that GPS and the Internet and cell-phone development were never really focused on (as at least two weren’t even developed). They agreed that the automotive industry took over the market, not the government.
“Fortunes were made — and lost. Mostly lost,” said Mort Downey, former DOT deputy secretary. Downey said the big deal in getting ITS off the ground was President Clinton’s decision to turn off GPS’ selective availability.
Michael Noblitt of IBM’s Global Business Services remembers that the telematics market really was developed by aftermarket manufacturers. “It was an exciting time. Privacy was traded for convenience and service. Consumers now see [telematics] as valuable,” he said.
Rich Schuman of Inrix, who was the second employee of the entity now know as ITS America, presented a timeline of technology events and tied them to intelligent transportation initiatives. “It’s a chaotic world — don’t try to find it. Focus on business incentives and leave technology to the bigger market,” he said.
Industry old-timers remember that the ITS America and ITS World Congress meetings were the only places to get market information in the 1990s because of auto manufacturers and the two largest digital map makers at the time, Navteq and Tele Atlas/Etak, were the major players. Both meetings have seen a resurgence in the number of auto makers and traffic companies exhibiting to compete for their share of the government market.
ALK Doing Well in European App Stores
At TRB, LBS Insider caught up with Alain Kornhauser, ALK Technologies founder, who talked about his role in the company and what markets have been good for them in the past year. ALK has been in several publications as having the iPhone and Andriod “top app” for its CoPilot Live, which is doing well in Europe, Kornhauser said.
“We’ve done well in respect to app stores. We also participated in the recent Iowa Caucuses when we offered directions to candidates for all 94 of the state’s counties,” he said.
Kornhauser said that Barry Glick, former MapQuest executive who was hired last year as CEO, runs the company’s day-to-day operations. In December, ALK established a new group, Enterprise Solutions, which combined its PC MILER, CoPilot Truck and CoPilot Live Professional product lines plus supporting map data, software tools and professional services. The Enterprise Solutions Group is led by Michael Kornhauser, senior vice president and Alain’s son, who reports directly to Glick.
While competing against free navigation applications, publications are saying that CoPilot Live has a niche because it has a friendlier interface and better directions to gas stations, restaurants and other points of interest.
Industry pioneer Kornhauser, who was involved in autonomous vehicle testing, said that ITS was a success because of the private industry, without government impact or influence. “They didn’t stand in the way,” he said.
Kornhauser, a long-time Princeton University professor and head of its transportation program, said he likes being an entrepreneur. “I also like the [location] space,” he said.
In other LBS news:
Join us for GPS World magazine’s LBS Market in 2012 webinar, “LBS 2012 — Show Me the Money,” on Feb. 22 at 10 a.m. Pacific Standard Time. Speakers will include several industry executives. Register for free.
Audiovox Electronics Corp launched its Car Connection and Care Connection products, both of which Audiovox considers LBS-capable, that will use Sprint’s Nationwide Network in the U.S.A. Car Connection is a new plug-in on-board diagnostic (OBDII) device that will allow consumers to monitor, manage and maintain not only their own but other family drivers’ habits. Care Connection is a wearable personal tracking system that features two-way voice communication to locate children, teen drivers and aging parents.
Persistent Systems purchased Openwave’s Mobile Location-Based business, to offer what its says will be the first enterprise carrier-based LBS. The company says the big market opportunity is that businesses want asset tracking, geo sensing and couponing.
Mobility’s first phase saw fixed-line communications go mobile. The next phase saw the Internet go mobile. We now behold a paradigm shift in the third phase, where real world communication bridges to the virtual world, via richer communications on smartphones.
For device manufacturers and location-aware service and app creators, it’s no longer about creating unique standalone experiences, it’s about enhancing real-time experiences by enriching everyday consumer behavior with virtual content and relevant information to a particular place and point in time. Location is an important canvas to a series of components that will unlock the possibilities of a more fulfilling, spontaneous — and sometimes amazing — mobile experience. By bringing together the quality of positioning and maps, enabling personalization with places and recommendations, evolving the simple check-in, and enhancing the experience with augmented reality, we activate a seamless, immersive experience that adds value to consumers’ daily life adventures.
Most importantly for wireless operators, location, as a key part of context and relevance, provides a unique opportunity to create revenue.
Location Positioning and Maps
As we create advanced mobile positioning technologies, consumers increasingly become accustomed to location-aware services. Outdoor positioning was our entrée into the market, and it has becoming more and more accurate via new satellite systems in addition to GPS (GLONASS, SBAS, QZSS), use of motion sensors, assisted-GNSS enhancements, and software algorithms to enable instant time to first fix (TTFF), and seamless fixes. On the other hand, pinpointing your location indoors still presents challenges from an accuracy standpoint.
At Nokia, we support Open Mobile Alliance Secure User Plane Location (OMA SUPL, incorporating AGPS and cell-ID) standards for our devices, and enhance our proprietary Nokia Positioning Service (NPS) based on leading-edge assisted-GNSS (GPS+GLONASS) technologies. Our NPS service supports global crowd-sourced databases for cellular tower and Wi-Fi access-point location information. These provide virtually instant TTFF everywhere and enable always-on location awareness — even on devices without an integrated GPS receiver or data connectivity.
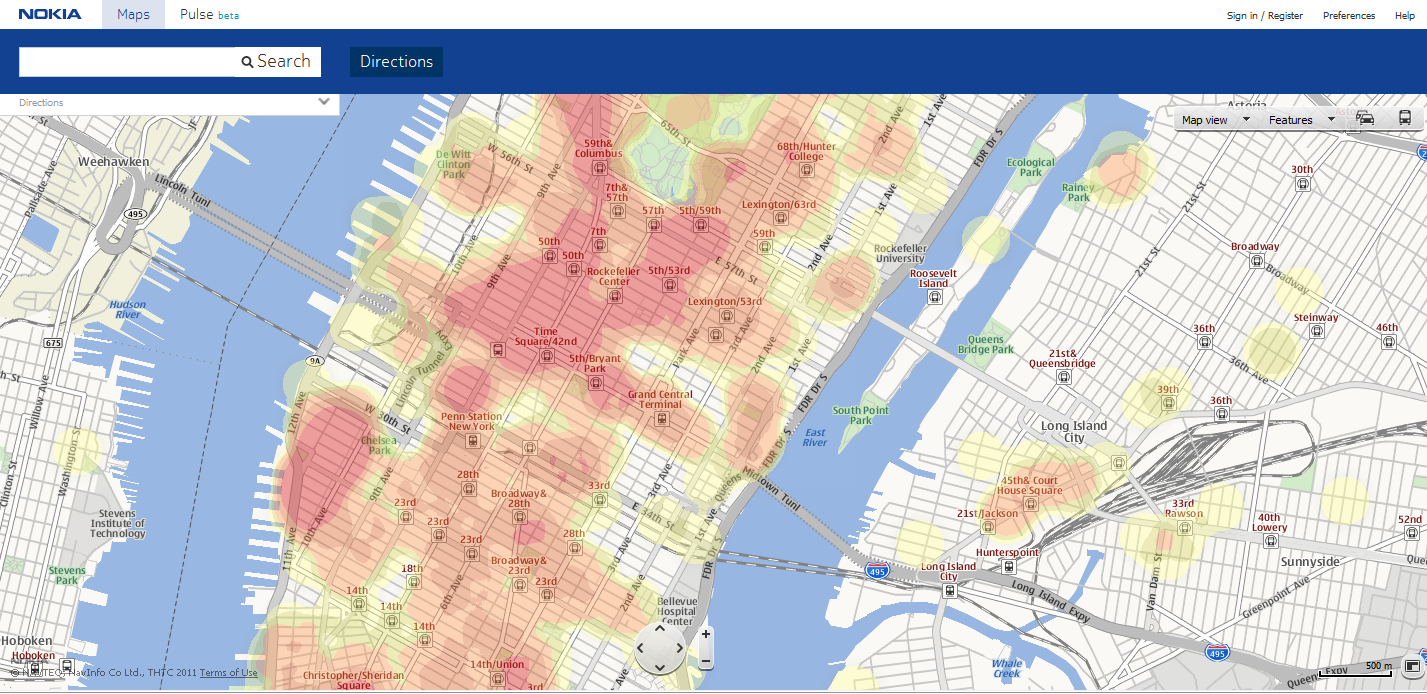
3-D Building overlay for real-world representation.Heat map. to see where the action is: concentrations of location-enabled mobile phone users that can provide data on places where others are dining, dancing, or shopping.
We’re also setting our sights on the next frontier: research concept around high accuracy indoor positioning (HAIP) technologies. Nokia’s current HAIP trial system relies on a dedicated positioning beacon, which acts as an indoor satellite when placed on the ceiling. It can accurately locate your position in a room and how far you are from your desired destination in real-time, with an accuracy of up to 30 centimeters. In this manner, we could direct a potential customer to a physical store front, and further to a specific product on the shelf inside the store.
HAIP beacon from Nokia, for high-accuracy indoor positioning.
Another example comes from Shopkick, with its own proprietary solution for indoor positioning that utilizes a similar beacon placed inside a retail store. On the device side, the ShopKick app listens via the mobile device microphone and alerts a company when a valued customer physically walks into its store. According to TechCrunch, one of Shopkick’s partner retailers “is estimating $50 million in measurable incremental revenue as a result of the Shopkick mobile app.”
The business opportunity is clear: retailers can now directly connect to the consumer for one-to-one marketing and engagement. Consumers are rewarded instantly, on the spot, and enticed to collect further rewards through loyalty programs.
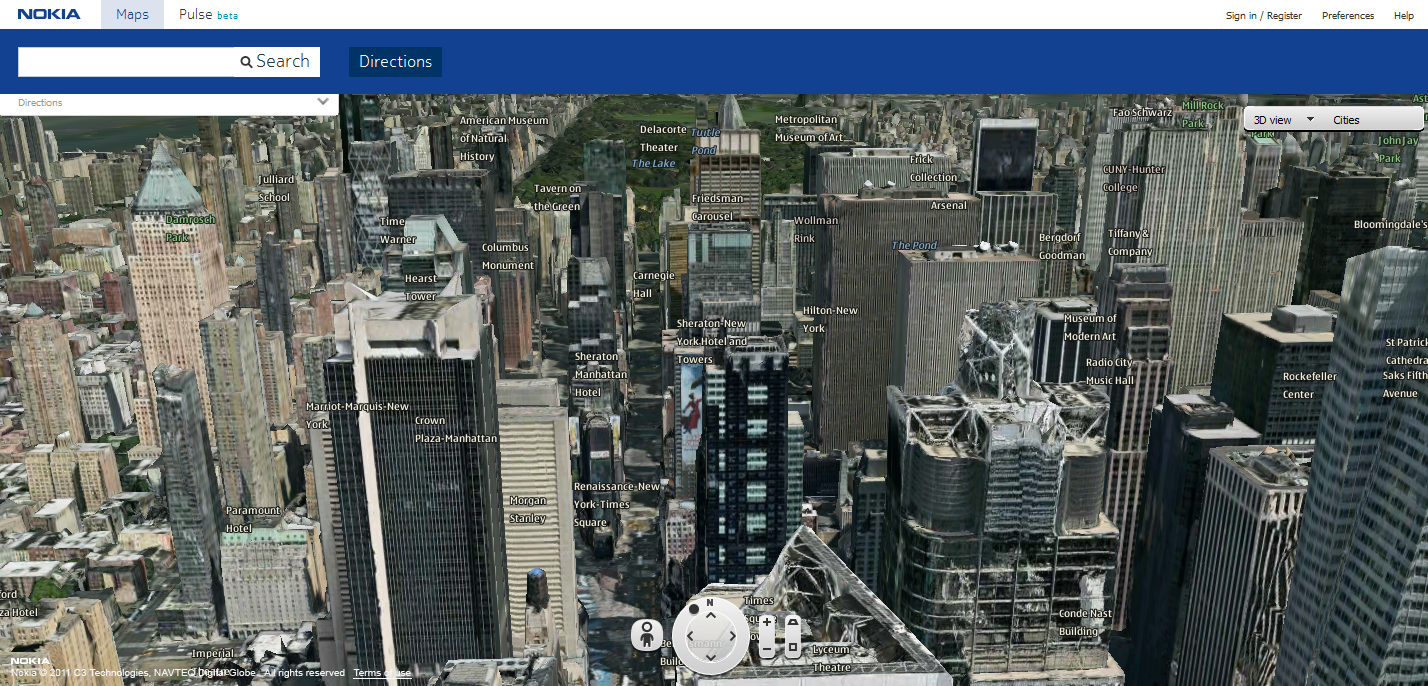
Imagine enhancing this experience further with a visual representation of your position on a map in an outdoor situation, which can offer a wealth of functionality and create a 3D representation of the real world. At Nokia we are further enhancing our NavTeq maps that deliver accurate 360-degree panoramic street-level imagery, 3D building overlays and a point-of-interest (referred to as a place in this article) interface as individual layers. The map data collection provides individual high-density content layers that enable more fluid animation and 3D mesh building overlays. Users can highlight and select buildings and places to interact with in 3D within their surroundings. This merges the real and virtual world, allowing physical and digital objects to co-exist and interact in real time. Imagine the endless opportunities: zoom in on a 3D map of a restaurant storefront, click the menu on the window to see the special of the day, or receive a discounted offer based on something you have liked in the past.
Places and Recommendations
The way we interact with our mobile device is evolving to mimic the way we exist in the real world. When we refer to a place or to a location, for example, we don’t talk in terms of coordinates or an address, rather we say “the Starbucks around the corner from MOMA.” In building devices and applications, we build the place with the foundation of core data (name, address, longitude and latitude, contact details) and layer on top of that an ever-expanding amount of rich data that comprises ratings and reviews, hours of operation, wheelchair access and spatial data extended to entrances, and more. Thus, we begin to layer in context and we no longer need to know the Boolean constructs that we learned in Web 1.0 to talk to a search engine and find exactly what we want.
Managing this rich, evolving set of place data in a relevant manner will increase in importance. It will also open the door to getting recommendations outside of your normal social community. For example, heat maps that allow you to instantly see where the action is in cities around the world, quickly sharing insight into where locals eat, dance, and shop. Check out examples from Nokia (maps.nokia.com) and mobile apps like AroundMe or Foursquare Radar. Providing locally relevant content to end users also extends the opportunity to connect local merchants to their specific target audience or entice new ones.
JiWire reported in August that “53 percent of the on-the-go U.S. audience revealed they are willing to share their location to receive more relevant content. Mobile consumers under the age of 34 are more eager to share, with 60 percent offering their location for better information.” Focusing on the qualifier, “offering their location for better information,” is where places and recommendations become a powerful medium, and advertisements and offers become another valuable piece of the rich data set offered via your mobile device.
Consider a restaurant search that returns a result for a Chinese restaurant your friend has rated 5 stars for its Mongolian beef, which in the past, you have indicated you liked. As part of the information presented, you see a 15-percent off promotion when you view the menu prices. Or perhaps you’ve searched for a children’s museum, and navigation finds the destination and starts directing you from your current location. Upon arrival, you might receive an offer for discounted membership. As more consumers gravitate towards location-based or location-incorporating services on their smartphones, there’s a great opportunity for developers and business owners to integrate place and recommendation experiences.
Consumer Engagement
Utilizing positioning, maps, places and recommendations are the building blocks on which you can create contextually relevant experiences that consumers will find engaging and sticky and which can open the door to business opportunities. Research shows that consumers are willing to check-in to a location, either by text messaging or by using a mobile application on a smartphone; the application will use the phone’s GPS to find the current location. Many social networking services, such as Foursquare, Google+, Facebook, and Gowalla allow users to check in to a physical place and share their location with their friends. Comscore reported that “16.7 million U.S. mobile subscribers used location-based check-in services on their phones in March 2011, representing 7.1 percent of the entire mobile population.”
I still believe check-in remains a niche as it’s not a natural human behavior but is a good starting point for interacting with a location. Check-in needs to be bundled with offer redemption to encourage people to check-in. Also, check-in data can add a new layer of behavior that may not be reflected in recent purchases. For example, a check-in at a gym adds valuable lifestyle information about a consumer, which can aid in ad-targeting efforts.
Now more than ever, as we explore and engage with the world around us, we want to experience amazing everyday adventures. We can enhance this adventure further by augmenting the rich content associated with places in a visual representation that can be consumed through your mobile device in the real world. Imagine you’re in Times Square in Manhattan and you open an augmented-reality experience like Nokia City Lens or Yelp’s Monocle and start panning around you. Icons might pop up to indicate you have a loyalty card for a particular chain of coffee shop; a consumer electronics store has your favorite Wii game on sale; a good friend just gave a nearby restaurant a 5-star review. Perhaps you’ll even find you can get home in less than half an hour if you take a new suggested route that accounts for traffic that’s moving a little slower than usual on your typical drive.
The Opportunity Ahead
In this third phase of mobility, our mobile devices will be a bridge to enriching our lives with virtual content, as long as it is relevant and engaging. Location is a catalyst to enhance virtual interaction with real-world places, enticing people to visit such real-world places. For developers and marketers, business opportunities lie in using highly accurate positioning to drive consumers into storefronts and directly to the products they want; in enabling highly personalized experiences with places that present the right offer at the right time to the right consumer; and in elevating the check-in to engage and reward the consumer. Context, relevance, and consumer engagement will all provide unique monetization opportunities as location technology continues to evolve.
Christopher Peralta is head of location and advertising services for Nokia in North America, responsible for mobile navigation and location-aware services that connect users to locally and socially relevant personalized content and experiences.
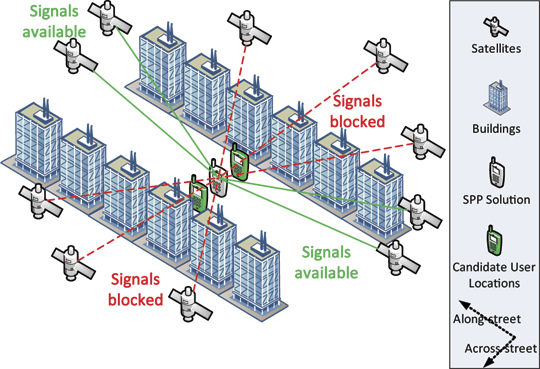
Shadow matching. The two GNSS mobile phones beside the middle one show additional possible user positions referenced by the along-street component of the standard point positioning (SPP) solution.
By Paul D. Groves, Lei Wang, and Marek K. Ziebart
GNSS positioning in dense urban areas is unreliable, with accuracy particularly poor in the cross-street direction. One solution is shadow matching, a new positioning technique that uses 3D building models to predict which satellites are visible from different locations and compares this with the measured satellite visibility to determine position. This article presents test results of a preliminary shadow-matching algorithm in a London urban canyon and discusses the practical implementation of the technique
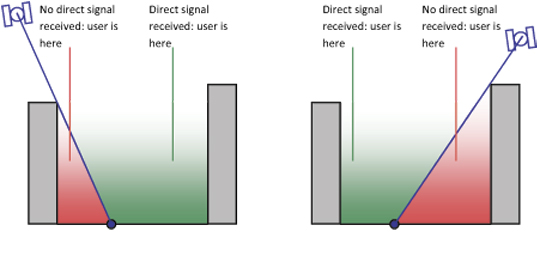
Poor GNSS positioning accuracy is common in urban canyons where tall buildings block the direct line-of-sight (LOS) signals from many, sometimes most, of the satellites, effectively casting GNSS shadows over the adjacent terrain. Without direct signals from four or more satellites, an accurate position solution cannot be determined. Sometimes, a degraded position solution can be obtained by using signals that can only be received by reflection off a building, known as non-line-of-sight (NLOS) signals.
Using GLONASS in addition to GPS considerably enhances direct signal availability, and the ongoing deployment of Galileo and Compass will enhance it further. However, an urban canyon affects the geometry of the available GNSS signals as well as their number. Signals with lines of sight going across the street are much more likely to be blocked by buildings than signals with lines of sight going along the street (see Figure 1). As a result, the signal geometry, and hence the positioning accuracy, will be much better along the direction of the street than across the street. For example, for a building-height-to-street-width ratio of three and direct signals from four GNSS constellations, the cross-street position uncertainty can exceed 20 meters, while the along-street uncertainty is within 5 meters.
Figure 1. Signal geometry of GNSS satellites in an urban canyon (aerial perspective).
This level of accuracy is good enough for some applications but not others. Knowing which side of the street a pedestrian on is useful for visitor guidance and location-based advertising, while it is critical for guiding the blind and visually impaired and for augmented-reality applications. Similarly, lane-level positioning is important for advanced intelligent transportation systems that can direct individual vehicles in order to maximize traffic flow and prioritize emergency vehicles.
Improving GNSS positioning in urban canyons requires lateral thinking. If it’s not possible to calculate a sufficiently accurate position solution using the visible satellites, why not use the nonvisible satellites as well? This is exactly what shadow matching does. If you know where the buildings are and how big they are, you can deduce positional information from the knowledge that certain signals are blocked.
This requires a 3D model of a city’s buildings. These are becoming more accurate and widely available and have already been used to predict GNSS signal availability and multipath interference.
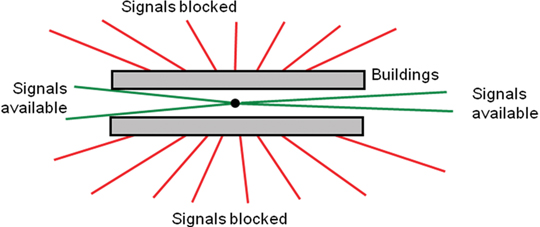
The principle of shadow matching is simple. Due to obstruction by buildings in urban canyons, signals from many GNSS satellites will be receivable in some parts of a street, but not others. Where each direct signal is receivable can be predicted using a 3D city model. Consequently, by determining whether a direct signal is being received from a given satellite, the user can localize their position to within one of two areas of the street. Figure 2 illustrates this. By considering other satellites, the position solution may be refined further, producing a much more accurate cross-street position solution than available from conventional GNSS positioning in this environment. Thus the observed signal shadowing is matched with the predicted shadowing to determine position.
Figure 2. The shadow-matching concept: using direct signal reception to localize position.
This concept of shadow matching, has been proven by mathematical modeling. Satellite visibility predictions using a 3D city model of London have been validated with real-world observation, demonstrating the practical potential of shadow matching. Here, shadow matching is brought from proof of concept one step further to practical demonstration. A preliminary but complete implementation of shadow matching has been developed and tested in London using real-world GPS and GLONASS measurements. The algorithm is described first, followed by the test results. We then discuss dealing with different types of signal propagation that occur in urban areas. and how to implement shadow matching in real time on a platform such as a smartphone.
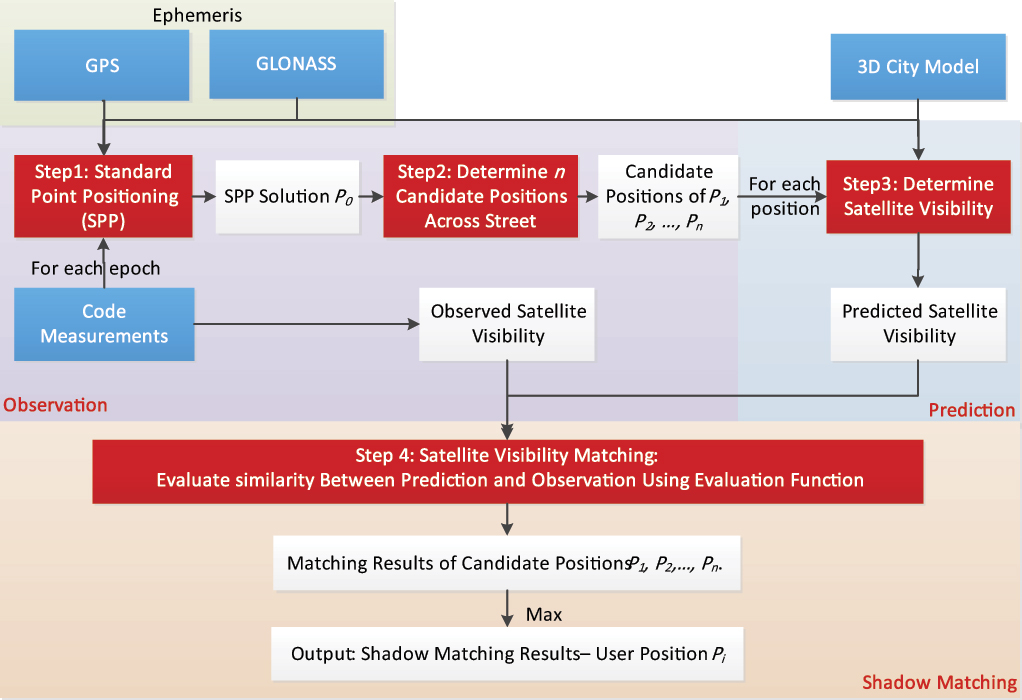
Shadow-Matching Algorithm
A basic shadow matching algorithm may be broken down into four steps:
Perform standard point positioning (SPP) using GNSS pseudo-ranges to obtain an approximate user position.
Define the search area for the shadow-matching position solution, generating a set of possible user positions close to the approximate position solution.
Predict satellite visibility at each candidate position using the 3D city model.
Evaluate the similarity between predicted and observed satellite visibility at each position. The candidate position with the best match is deemed to be the shadow-matching solution. This process can be conducted epoch by epoch, so the GNSS user can be either static or dynamic.
Conventional Positioning. In the first step, SPP using GNSS pseudo-ranges is conducted to acquire an initial user position. In an urban environment, the accuracy will often be poor, partly due to contamination by NLOS signals. Consistency checking may be used to identify the NLOS signals and, where possible, remove them from the position solution.
Candidate Position Determination. As discussed earlier, signal geometry and hence positioning accuracy will be much better along the direction of the street than across the street. Therefore, in this preliminary shadow-matching algorithm, the along-street component of SPP solution is used as a reference to generate a set of possible user positions that vary in across-street direction only (shown by the two mobile phones beside the SPP solution on the opening page of this article).
A more advanced shadow-matching algorithm would also consider candidate positions in the along-street direction and would vary the size of its search area based on an assessment of the quality of the SPP solution. The smaller the search area, the more efficient the shadow-matching algorithm will be. However, the search area must be large enough to contain the true position. Further research is needed to determine the optimum search area.
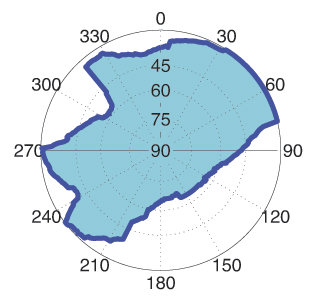
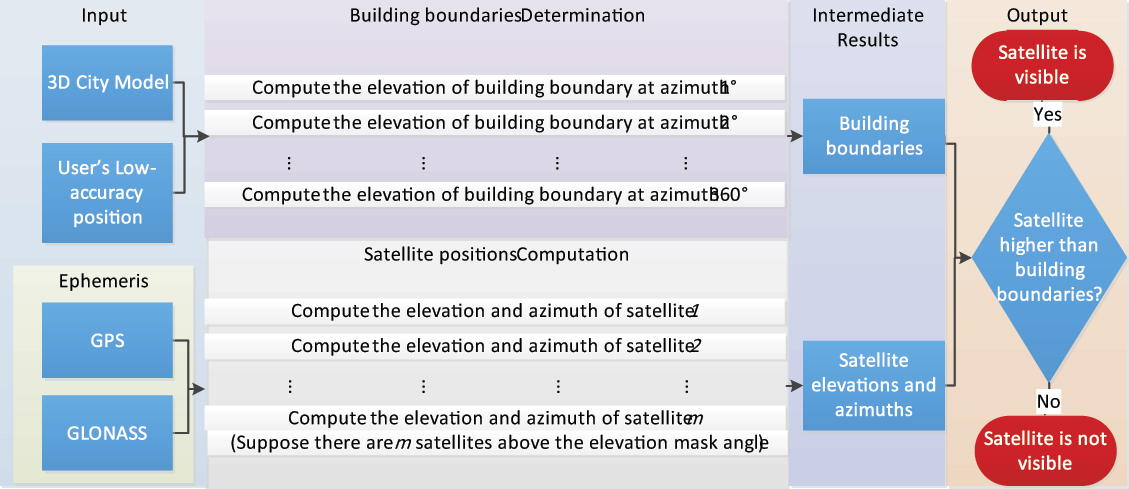
Satellite Visibility Prediction. At each candidate position, the two-step building boundary method predicts satellite visibility from the 3D city model. First, a building boundary from a GNSS user’s perspective is determined for each azimuth (from 0 to 360°) as a series of elevation angles. The results from this step show where the building boundaries are located within an azimuth-elevation sky plot. Figure 3 shows an example of a building boundary computed from a possible user location. Once the building boundary has been computed, it may be stored and reused.
Figure 3. Example of a building boundary as azimuth-elevation pairs in a sky plot. (The centre of the plot correspond to a 90º elevation or normal incidence).
Next, each satellite elevation is compared with the building boundary elevation at the same azimuth. The satellite is predicted to be visible if it is above the building boundary. If the satellite is just within the building boundary, a potentially diffracted signal can be predicted. However, this feature was not included in the preliminary shadow-matching algorithm described here. A software toolkit for determining satellite visibility was developed in C++.
Figure 4 shows the relationships between its processes.
Figure 4. The process of satellite visibility prediction. (Click to enlarge.)
The building boundary approach is efficient where a great number of satellite visibility tests are performed at the same location. For real-time visibility determination, building boundaries may be pre-computed over a grid of possible user locations and stored. However, there is an alternative. Instead of computing building boundaries, each satellite LOS can be directly compared with the city model to determine if it is blocked by buildings. This single LOS method is more efficient overall where only a few satellite visibility tests are performed at a given location. However, for real-time, it imposes a much higher processing load than using pre-computed building boundaries.
In practice, either method may be employed, depending on the situation. For real-time shadow matching, the trade-off is between a higher processing load for the single LOS method and greater data storage for the building boundary method. For non-real-time visibility determination, the trade-off depends on the number of tests required at each location.
Matching Prediction and Observation. The final step, evaluating the similarity between predicted and observed satellite visibility at each position and identifying the best match as the shadow matching solution, comprises three functions: satellite matching, position scoring, and position comparison.
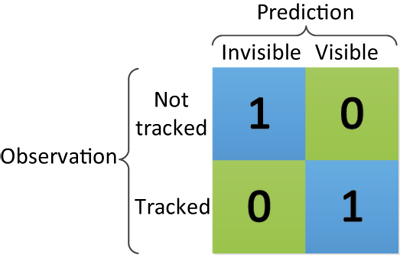
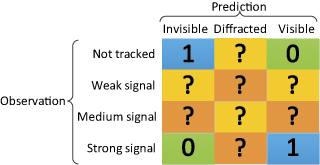
Satellite matching determines for each satellite the degree of similarity between the predicted satellite visibility and the real observation. Figure 5 shows the simple satellite matching function deployed for this study. For each satellite above a pre-set elevation mask angle, if the prediction agrees with the observation, the score is one; otherwise, the score is zero.
Figure 5. Scoring matrix giving the score for each satellite in shadow matching.
Future research will be conducted to extend the matching function so that different scores are produced for signals predicted to be in the diffraction region and signals observed with low and medium signal-to-noise levels.
Position scoring evaluates the overall degree of match between predicted and observed satellite visibility for each possible user position, summing up the satellite matching scores for each candidate position to give a position score.
Finally, position comparison selects the candidate position with the highest overall score and outputs this as the position solution. However, sometimes there is more than one candidate. Further research is needed to find the optimum way of determining a positioning solution with associated error bounds from a grid of shadow-matching scores.
Figure 6 summarizes the shadow-matching process.
Figure 6. The shadow matching process. Blue denotes input data, red denotes main process steps, and white denotes intermediate or final results. (Click to enlarge.)
Experimental Verification
We used a 3D city model of the Aldgate area of central London to test shadow matching. The model has a high level of detail and decimeter-level accuracy.
The software toolkit developed for this study stores and processes 3D city model data using Virtual Reality Modeling Language (VRML), an international standard format. Model data in other formats can be transformed to VRML. Buildings in VRML format are represented by structures, which in turn comprise polygons (normally triangle meshes).
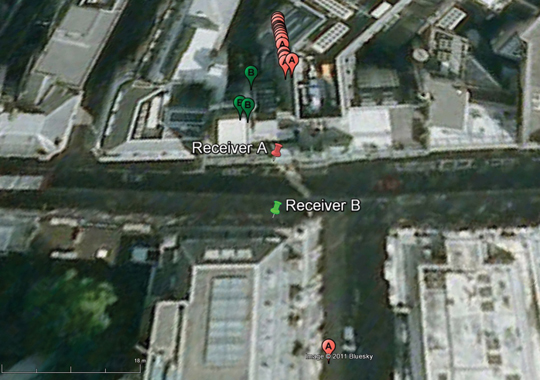
Methodology. Experimental data were collected in a highly built-up area in central London, using two multi-constellation survey-grade GNSS receivers, logging 1 Hz data simultaneously (note that shadow matching does not require two receivers). As shown in Figure 7, they were set up on the north and south sidewalks of Fenchurch Street.
Figure 7. True position of receivers against conventional standard point positioning (SPP) solution. Pins show the true positions and bubbles the SPP solutions; the numbers and colors indicate the receiver.
For the first step of shadow matching, software was used to conduct SPP processing using GPS and GLONASS signals. Only L1 pseudo-ranges were used to acquire an initial user position. It can be seen in Figure 7 that the conventional SPP solutions have significant offsets from the true positions (16–31meters for receiver A and 18–24 meters for receiver B). As receiver B suffers more signal blockage from buildings, it has fewer epochs with four or more satellites in view, so fewer successful SPP GNSS solutions were obtained. Although they have significant offsets in the across-street direction, they are consistent and agree much more with the receivers’ true positions in the along-street direction. This result verifies the assumption made in the shadow-matching algorithm that the accuracy of the along-street SPP positioning solution is much better than in the across-street direction.
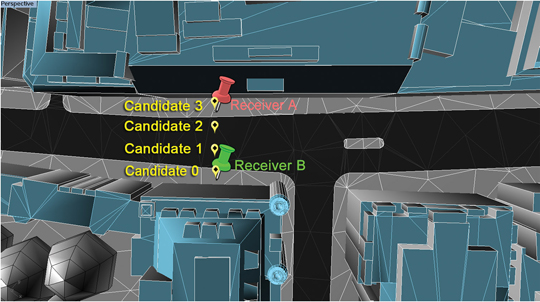
Four candidate user positions were selected using the common along-street position of the conventional SPP solution. They are distributed across the sidewalks and vehicle lanes, on both sides of the street. Figure 8 illustrates this. Note that candidate 3 is the true position of receiver A and candidate 0 is the true position of receiver B.
Figure 8. Candidate user positions (in yellow) and true receiver positions (in red and green) in the shadow matching experimental verification.
Satellite visibility was predicted individually for each of the four positions. Then each was compared with the real data observed from the two GNSS receivers. Figure 8 shows part of the architectural city model of London used to predict the satellite visibility.
Results. The experimental results are shown in three stages: the satellite visibility comparison between prediction and observation, the candidate position scoring function, and the success rate for each candidate location. The primary success criterion is whether the algorithm is able to determine the correct side of the street. A secondary aim is to test whether the algorithm can distinguish between the sidewalk and vehicle lane on the same side of the street.
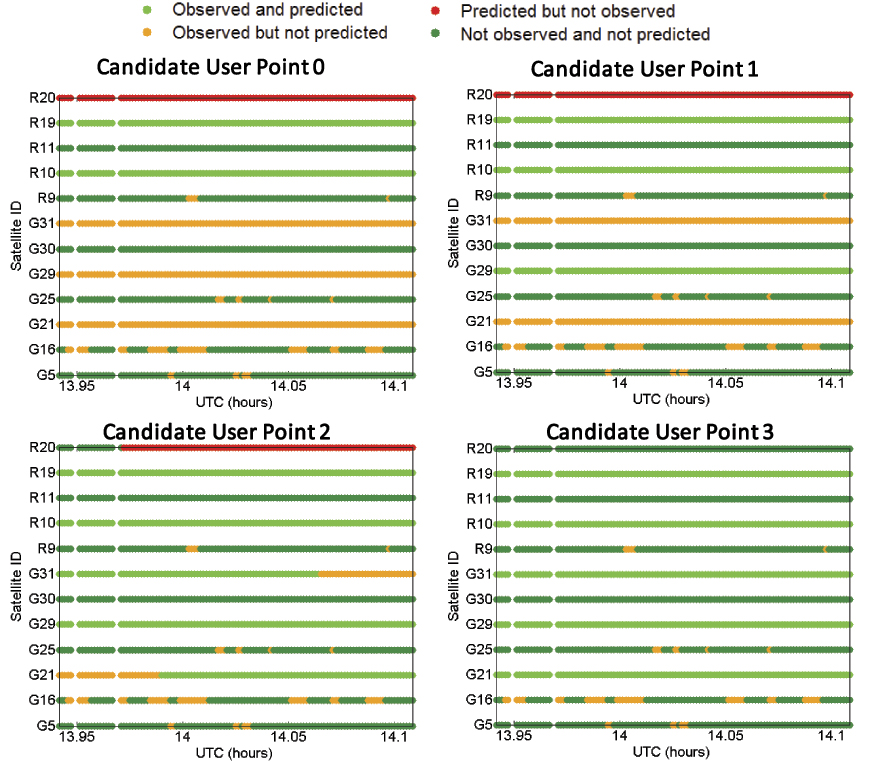
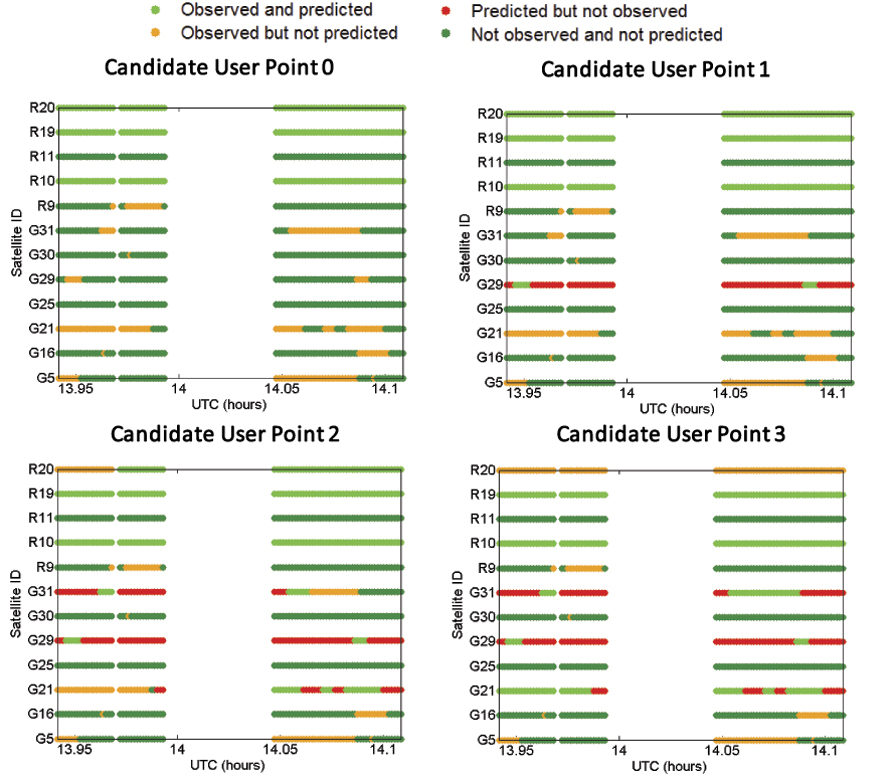
To show the degree of agreement or disagreement between the predicted and observed satellite visibilities, time series for each of the four candidate positions are compared with each of the two receivers’ experimental data. The results are shown in eight graphs. Figure 9 compares data from receiver A for each of four possible user locations. Figure 10 shows the same comparison for receiver B. The time window was from 13:56:30 to 14:06:30 (UTC). G denotes GPS satellites and R refers to GLONASS satellites.
In Figure 9, the green and blue dots indicate an agreement between prediction and observation for the candidate user position, while the orange and red colors represent their disagreement. Thus, a larger number of cases of green and blue indicate a better match between the candidate user location and the observations. Therefore, such a candidate is more likely to be close to the receiver’s true position.
Figures 9 and 10 clearly show that the closer the candidate position is to the true position, the greater the agreement between predictions and observations.
Figure 9. Comparison of satellite visibility between receiver A and candidate user locations (candidate user point 3 is the true position). (Click to enlarge.)Figure 10. Comparison of satellite visibility between receiver B and candidate user locations (candidate user point 0 is the true position). (Click to enlarge.)
Even at the correct candidate location, there is not complete agreement between the observations and predictions. A number of signals were observed but not predicted. These had signal-to-noise levels 8 dB or more lower than the predicted signals and are most likely due to reflection and/or diffraction.
However, shadow matching does not require complete agreement in order to work. In this test, no signals were predicted but not observed at the correct location.
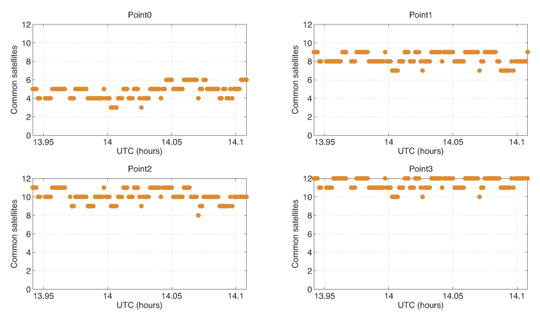
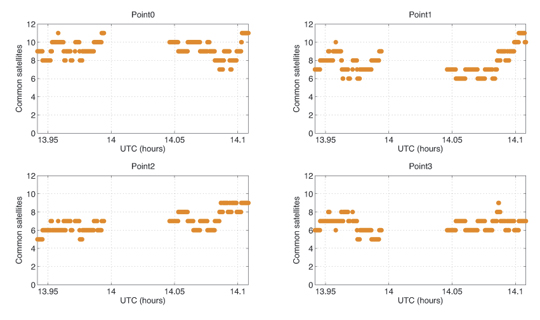
To complete shadow matching, we evaluate each candidate position by summing up the number of satellites common to both the predictions and real observations. Figure 11 and Figure 12 show the results of the summation for receivers A and B, respectively.
Figure 11. Evaluation of similarity — number of common satellites in view between each candidate user point and receiver A.Figure 12. Evaluation of similarity — number of common satellites in view between each candidate user point and receiver B.
It is clear from Figure 11 that among four possible user positions, point 3 is the one with the highest agreement score with the observations from receiver A. As shown in the right-bottom graph, for about half the epochs, visibility predictions for all 12 satellites above the masking angle match the real observations.
As shown in Figure 12, for receiver B, the time series of the agreement score is generally better at the true location (Point 0) than at other points. However, the level of agreement between predictions and observations is not as good as at receiver A‘s location.
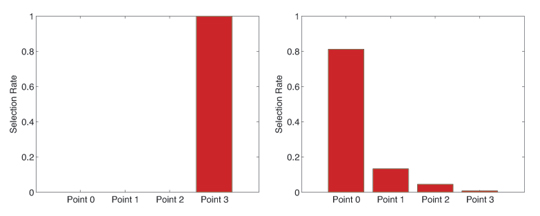
To judge the performance of shadow matching, the selection rate of each of the four candidate user positions for each of the two receivers was computed by dividing the number of times that position was selected by shadow matching by the number of epochs. Where the same score was attained for two or more positions, each position was considered partially selected. For example, if two positions have the same score, then each of them is considered half-selected.
The selection rate results are shown in Figure 13. For receiver A, the shadow matching algorithm correctly indicated the true position among the four candidates 100 percent of the time. This means the algorithm successfully distinguished between the two sides of the street, and further distinguished between a user on the sidewalk and a user in the vehicle lane. For receiver B, the algorithm identified the correct side of the street (Points 0 and 1) 94.65 percent of the time, and the correct location among the four candidates in 81.29 percent of the epochs evaluated.
Taking the average of the two test sites, the correct side of the street was identified 97.3 percent of the time and the correct position from the four candidates 90.6 percent of the time.
Figure 13. Candidate position selection rate for receiver A (left) and receiver B (right).
Practical Implementation
The basic shadow-matching algorithm operates under the assumption that GNSS signals are either directly visible or blocked by a building. However, in reality, signals can also be received via indirect paths due to reflection or diffraction. This was observed at both locations during the tests. As shadow matching seeks the position with the best match, rather than looking for a perfect match, it can tolerate a certain number of these signals and still identify the correct position.
These tests were performed using survey-grade user equipment with a relatively high tracking threshold, so the weakest signals are not observed. Furthermore, the antenna has strong polarization discrimination so exhibits a low gain for reflected signals. However, for shadow matching to be practical, it should also work on a smartphone, which typically combines a high-sensitivity receiver with a linearly polarized antenna, which does not distinguish between direct and reflected signals. Consequently, a smartphone receiver is likely to observe more reflected and diffracted signals.
NLOS reflected and diffracted signals are weaker than directly-received signals, so the shadow-matching algorithm could be modified such that only signals received above a certain signal-to-noise threshold are classified as observed. However, this would introduce a new problem: signals received via a direct LOS path but attenuated by a person’s body would be classified as not observed, even though they would be predicted to be visible at the correct location. The same problem would occur where the LOS coincides with a direction in which the antenna is weak. Consequently, to get the best performance from shadow matching, several different categories of observed signal should be considered in the scoring matrix.
Diffraction occurs when the LOS is just inside the building boundary. Therefore, the 3D city model can be used to predict when a diffracted signal may be received. However, it cannot easily be used to predict the signal-to-noise level of that signal because diffraction patterns are complex. Therefore, shadow matching can potentially be improved by adding a third prediction category for diffraction. Figure 14 shows a posssible optimized scoring matrix with values between 0 and 1 for the new categories to be determined empirically, possibly as functions of the measured signal-to-noise. Different scoring matrices may be suited to pedestrian and vehicle applications and to different user equipment designs.
Directly-received signals are also affected by multipath interference. However, this will not normally impact shadow matching as it does not affect whether a signal is received or not.
Shadow matching has been demonstrated using both GPS and GLONASS measurements. The more signals available for shadow matching, the better the expected accuracy and reliability. Thus, the addition of Galileo, Compass, and regional systems, including SBAS, should improve performance. However, further research is needed to determine whether shadow matching using GPS alone is viable. Combining data from multiple epochs should also improve shadow matching performance, particularly where the user is moving.
A practical shadow-matching algorithm must be implementable in real time on a mobile device. Three models maybe considered.
A network-based solution, whereby GNSS measurements are transmitted to a server, which stores the building boundary data, computes a solution and then sends it to the user.
A handset-based solution, where the shadow-matching algorithm is run on the handset, which also stores the building boundary data.
A hybrid model, whereby the shadow-matching algorithm runs on the handset, but the building boundary data is streamed from a server as and when required.
Using stored or streamed building boundaries, fewer than fifty comparison and addition operations are required to calculate an overall shadow-matching score for one candidate position with two GNSS constellations. Therefore, shadow matching may be performed in real time on a mobile device with several hundred candidate positions, where necessary.
Without any data compression, about 300 bytes are required to store a building boundary with a 1° resolution. If a 2×2 meter grid spacing is used for the candidate positions, a 1-kilometer long, 20-meter wide street will contain 5000 grid points, requiring 1.5 MB of data storage. By exploiting the similarities both between neighboring azimuths in the same building boundary and between building boundaries at neighboring grid points, substantial data compression should be achievable; possibly up to a factor of ten.
Therefore, a standard 4 GB flash drive could store building boundary data for 2,500–25,000 kilometers of road network. For comparison, the Greater London metropolitan area contains about 15,000 km of road. However, as shadow matching is only useful in streets where conventional GNSS positioning is poor, the database need only contain building boundary data for these streets, maybe 10 percent of the total. Therefore, it should be practical to preload a mobile device with shadow-matching data for several cities, which could be kept up-to-date via the internet.
An alternative model is to download the building boundary data from a network server as required. A conventional GNSS position solution or Wi-Fi fix should be able to localize position to within 1,000 grid points, requiring 30–300 kB of building boundary data to be downloaded in order to perform shadow matching. This takes less than two seconds using a 3G mobile phone connection with an average data rate.
In practice, shadow matching, would be implemented as part of a wider intelligent urban positioning system. This shadow-matching algorithm assumes that the user is outdoors. Indoor operation, if viable, would require a different approach. It is necessary to determine the error bounds of the conventional GNSS position solution, not only to determine the search area for shadow matching, but decide whether shadow matching should be performed at all. For example, in a completely open-sky environment, shadow matching will fail, but a good position solution will be obtainable conventionally.
There are other ways in which 3D city models could be used to improve GNSS positioning. For example, they could aid identification of NLOS and multipath-contaminated signals and, in principle, even correction of NLOS ranging measurements. Intelligent urban positioning can also incorporate additional sensors, such as odometers on cars and cell phone signals, WiFi and inertial sensors for pedestrian users.
Next Steps
Three potential future lines of research stem from this work: improving the initialization from conventional GNSS positioning, improving of satellite visibility predictions with ambiguous observations, and optimizing the position determination from the shadow-matching scores. In addition, performance will be evaluated over a wider range of environments.
Acknowledgments
The authors gratefully acknowledge Kimon Voutsis for his support with the experiments. This work has been jointly funded by the University College London Engineering Faculty Scholarship Scheme and the Chinese Scholarship Council. This article is based on a paper presented at the 2011 European Navigation Conference in London, organized by the Royal Institute of Navigation.
Manufacturers
The tests used two Leica Viva GS15 GNSS receivers. Leica Geo-office software performed SPP processing of GPS and GLONASS signals. ZMapping Ltd. supplied the London 3D model.
Paul Groves is a member of the academic faculty at University College London (UCL), where he leads the Space Geodesy and Navigation Laboratory’s program of research on robust navigation and positioning. He is also author of the book Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems.
Lei Wang is a Ph.D. student at UCL. He received a Bachelor’s degree in geodesy and geomatics from Wuhan University in 2010. His current research interests are GNSS-based positioning techniques for urban canyons.
Marek Ziebart is professor of space geodesy, director of the Space Geodesy and Navigation Laboratory, and vice dean for research of UCL Engineering.
In the next two to four years, mobile device location platforms will be able to provide positioning performance that enables emergency call (E911) and location-based services (LBS) with excellent accuracy (5–10 meters) in all locations. We call this accurate everywhere location, and it will be a significant enabler of indoor navigation applications and for even wider adoption of consumer LBS.
In fact, we may eventually forget how we ever lived without it. This technology can enhance our lives by enabling our mobile devices to know precisely where we are at all times. Armed with this information, our devices can behave in a way that suits our specific situation, and they can do this without us having to do anything other than keep the phone with us.
Text and images will get significantly bigger while driving or walking. Facebook notifications can be automatically disabled while at work. Shopping lists can be automatically displayed when approaching a store that has an item on the list. The potential benefits are endless — provided that the privacy issues associated with location are handled appropriately.
GNSS is the superior technology when a mostly unobstructed sky is available, but it can’t deliver accurate position fixes in all environments — at least not at a cost and in a form factor that works for consumer mobile devices. Accurate everywhere location requires some form of advanced hybrid location technology. Because its definition is constantly evolving, the term hybrid can mean different things to different people. This article aims to clear that up.
Here is an overview of the hybrid positioning technology currently used in mobile devices, as well as what is coming in the next two to four years that will enable accurate everywhere location:
GPS + GLONASS. Multiple GNSS technologies are starting to be more common in new chipsets aimed at mobile devices, and assisted-GPS (A-GPS) + A-GLONASS is right around the corner. The benefit from this hybrid GNSS approach is that with more satellites in the sky, devices are likely to receive more line-of-sight signals in challenging environments where a significant portion of the sky is obstructed (like urban canyons). While this might improve performance on a street in downtown Manhattan, it does not help when you are in the middle of a building or in the subway.
Cellular Multilateration + A-GNSS. Mobile devices with CDMA cellular radios have supported hybrid A-GPS + advanced forward-link trilateration (AFLT) for more than a decade. This concept is now being applied to long-term evolution (LTE) devices, with support for A-GNSS + observed time difference of arrival (OTDOA) being written into the 3GPP standards. Both AFLT and OTDOA are forms of cellular multilateration, which means that devices can make measurements of relative timing offsets between multiple downlink cellular signals, and those measurements can be used in a hyperbolic multilateration formula to compute a position (one signal acts as reference and hyperbolic intersection of 2+ signals are used for position).
Does this sound familiar? It happens to be very similar to GNSS location computation, so it is possible to combine measurements from cellular signals and measurements from GNSS satellites to compute a hybrid position. For example, 2 satellites + 2 cellular measurements can be combined to compute a position, which makes this technique very attractive. Although it is used for both E911 positioning in North America and LBS worldwide, this technology will become even more widespread as LTE adoption increases.
A-GNSS + Wi-Fi Positioning + eCID. Many popular smartphones today support Wi-Fi positioning and enhanced cell ID (eCID) in addition to A-GNSS. This hybrid solution allows coarse positioning in indoor environments where A-GNSS does not work. Solutions for Wi-Fi and eCID positioning are currently very fragmented and proprietary. However, this is the reason you are able to get a semi-accurate position fix on your Android or iOS mobile device when GNSS satellites are impossible to measure (many other devices support this as well). These technologies are going to provide more accurate information as time goes on, but we don’t believe they will achieve accurate everywhere location on their own.
A-GNSS + Wi-Fi Positioning + Cellular Positioning + Sensors. You might have guessed it, but we think accurate everywhere location will be enabled by a combination of all the above hybrid techniques plus one more important technology: sensors. Integrated sensors like accelerometers, magnetometers, and barometers enable devices to sense changes in direction, orientation, and elevation. Given an accurate starting location (for example, GNSS position fix), sensors can track location accurately for several minutes (and this will continue to get better). Location error will accumulate over time, but this can be minimized when Wi-Fi, cellular, and GNSS positioning are used in conjunction to constrain the error. Furthermore, barometers can be used to track elevation changes, thereby allowing devices to know exactly what floor of a building a user is on. Other technologies, or signals of opportunity, may be used in the future to further improve performance, but we think this mix of A-GNSS, Wi-Fi, cellular, and sensor positioning is the key to accurate everywhere location in mobile devices.
With substantial R&D dollars being spent now, and standardized testing for hybrid positioning emerging this year, our best estimate is that the accurate everywhere technology will become commercially widespread by 2015.
Brock Butler is director of Spirent’s Wireless Location Technologies, part of a team that has made major contributions to development of the LBS standards in the 3GPP: Spirent filled the editor and rapporteur roles for the TS 51.010 and TS 34.171 A-GPS Terminal Conformance Specifications, as well as the editor role for the Enabler Test Specification for SUPL in the OMA. Butler holds a BSc in electrical engineering from Villanova University.
GPS trackers are a form of search, and to use them police must have a search warrant, according to a U.S. Supreme Court ruling today. The high court issued a unanimous ruling that a search warrant is required before police slap a GPS tracker on a criminal suspect’s vehicle to monitor the suspect’s movements, reports the Associated Press.
The decision was a defeat for the government and police agencies that increasingly rely on GPS surveillance. A GPS device installed by police on Washington, D.C., nightclub owner Antoine Jones’ Jeep helped them link him to a suburban house used to stash money and drugs. He was sentenced to life in prison before the appeals court overturned the conviction.
Associate Justice Antonin Scalia said that the government’s installation of a GPS device, and its use to monitor the vehicle’s movements, constitutes a search. The court ruled that GPS monitoring on the Jeep violates the Fourth Amendment’s protection against unreasonable search and seizure.
Justice Samuel Alito said the court should address how expectations of privacy affect whether warrants are required for remote surveillance using electronic methods that do not require the police to install equipment, such as GPS tracking of mobile telephones, reports AP. “If long-term monitoring can be accomplished without committing a technical trespass — suppose for example, that the federal government required or persuaded auto manufacturers to include a GPS tracking device in every car — the court’s theory would provide no protection,” Alito said.
Microsoft says this is its last year at the Consumer Electronics Show (CES). Fine. Move over because the car manufacturers are using the show to unveil stunning location and mobile offerings. It has only been a few years since automakers started coming to CES to pitch new in-vehicle mobile platforms. This year automakers have been knocking themselves out to bring smartphones, location and cloud content into the vehicle to enhance the driving experience. The CES invasion by the vehicle OEMs started in 2007 when Ford introduced Sync at CES. Kia followed in 2010 with UVO powered by Microsoft. 2012 brings a multitude of OEM mobile announcements, including one from first-time CES participant Mercedes-Benz.
Cars are getting smarter. Kia unveiled the next-generation UVO 2, which adds a crash notification assist feature that automatically dials 911 on a connected phone when an airbag deploys. It adds a number of location-based services that are controlled via a smartphone app that includes noting a car’s parked location on a map, transferring destinations from Google maps to the navigation system, and monitoring vehicle location and speed.
And the list goes on. Mercedes Benz made its initial appearance at CES to show off an app that allows drivers to plug iPhones into vehicles to enable the phone’s entertainment and navigation to appear on the in-dash display. Chevrolet introduced a new head unit that will use a smartphone’s apps, such as Pandora, to access cloud-based content and navigation. Ford added Roximity to provide contextual real-time discounts linked to the vehicle’s location and user’s preferences. TCS has its foot in this market, too. It will be supplying hybrid navigation solutions for the QNX in-vehicle car platforms.
Mercedes-Benz takes center stage at CES 2012.
After-market activity. You can tweet about your accident, make it a status update, or do both. TomTom has integrated Facebook and Twitter with its navigation app for iPhones and iPads. Information from Facebook events, places and friends will feed to create navigation routes. Destinations and arrival times can then be shared on these networks.
Heavy-weight skinny nav. Garmin has introduced the nüvi 3500 series, its new flagship personal navigation device, an ultra-thin GPS device with a five-inch screen. Capabilities include digital HD traffic and a smartphone link that can add live services, such as traffic information, traffic camera images, weather and fuel prices.
Good luck, Verizon. At a time when straight-up navigation is becoming a utility, Verizon is rolling out a new bundled application app package. It includes their navigation app, as well as NFL Mobile, ringback tones and Verizon Video for $12.99. I don’t know much about the NFL Mobile app, but it better be good. Given the poor marks received by Verizon Video and low interest in ringback tones, the package isn’t looking too appealing when navigation is often a freebie.
Need maps. TomTom will be providing Samsung with map and location content to power the Wave3 smartphone. TomTom will provide map coverage for more than 200 countries, POIs, traffic, 3D maps and landmarks and “safety-related speed cameras.” Safety-related speed cameras?
Enterprise routing trends. Enterprises using vehicle routing software for fleets of service and truck vehicles are increasing their buying of on-board computers, as well as smartphones for driver interfaces. These products are used for improved efficiencies in planning routes, and often feed analytics into a complex logistics system. Customers who used to be satisfied with just obtaining GPS positions of their fleets are now pushing for more telematics and a connected vehicle.
Lower prices and more pressure on productivity have pushed demand for on-board computers that can deliver data about the vehicle’s actual route, and sometimes connects to the engine to provide detail on how the vehicle was driven. Other fleets, particularly service fleets, are tending toward integrating routing apps with smartphones. The phones are cheaper than onboard computers, don’t need to integrated, and still can provide turn-by-turn directions to that day’s route. The trend is toward the Android operating system.
Navigating your way through thousands of booths and 140,000 attendees is a challenge in itself at the 2012 Consumer Electronics Show. While there was a huge amount of location-based services news, the big deal was the presence of just about every automobile manufacturer. Such off-site meetings as the Consumer Telematics Show, Showstoppers and AT&T Developer’s Conference also highlighted the connected car.
LAS VEGAS — It took several years, but most major automobile manufacturers are onboard with the idea that a vehicle needs to be connected. Most automobile manufacturers came to the Consumer Electronics Show here to show off their connected devices and explain where they think the market is going.
“The connected vehicle has arrived, though it is not a smart phone on wheels. This the year we are seeing a lot of growth — and I have been doing this a long time,” said Thilo Koslowski, Gartner vice president. “From 2008 to 2012, the majority of car manufacturers have installed connected vehicles. From 2013 to 2016, we will see really major market adoption. A mature market expects connected vehicles — and that’s right around the corner.”
Koslowski says that automakers shouldn’t be locked into one specific market strategy. “They aren’t going to make it if they do. Technology and business approaches evolve in parallel,” he said. “The traditional value and supply chains may not be the best way to market these systems…and you will see some consolidation.”
The aftermarket will take over the connected marketplace if the car makers won’t adjust their strategies, Koslowski said. He said in 2004, the CRM opportunity seemed to be more important to auto makers, but now it’s somewhere in the middle of importance. “We are primarily in the product differentiation phase now,” he said. “It is an open playing field right now, but it will be a challenge for companies who think they have it all figured out.”
Gartner’s research has found that consumers want wireless map updates, real-time weather and traffic, remote software updates and parking availability. What they don’t like are family and friend location information, creating and reading e-mail in a car, anon-demand music book, and such social networks as Twitter in the vehicle.
TomTom Signs Deal With Samsung
One of the bigger announcements in the location space at CES, and maybe the one with the most LBS tie in, was TomTom’s deal with Samsung. TomTom’s maps and location content will power Samsung’s Wave 3 smartphone. The deal basically allows the phone to have LBS, said Charles Cautley, TomTom managing director, automotive licensing.
The business-to-business market has been a strong one for TomTom, which estimated that around 40 percent of its earnings came from that segment, said Cautley, who spent considerable time at General Electric in the commercial vehicle market before coming to TomTom three years ago.
To cap off a big week, TomTom rolled out three portable navigation devices, Start, Via and Go Live. It also signed a licensing agreement with high-end automaker Fisker Automotive. Through a three-year-deal, TomTom will provide map and location data for the Fisker Karma electric sedan. “We absolutely think the electric vehicle market is going to grow,” Cautley said.
TomTom competitor Magellan also rolled out some new PNDs, including the RoadMate 9055-LM and back-up camera. “Overall, the PND is becoming less a novelty and more a utility,” said Magellan’s Stig Pedersen, senior director of marketing strategy. “We are moving more towards safety features in the next year.”
Auto Companies Announce Offerings At CES
Some in the automobile industry are now saying that CES is the place where car makers are rolling out the new technology, not at the concurrent Detroit Auto Show, which is used to roll out new cars.
Chrysler Group’s Uconnect now has a website that allows its users to get in-car updates for their in-vehicle system through a mobile phone, said Joni Christensen, Uconnect head of marketing.
After the initial cost of Uconnect, all that a car owner needs to pay for, after a year’s free service, is the Sirius radio, Christensen said. The navigation system, like Ford’s Sync, is tied to one system — and like Cadillac’s Cue, can be switched from one screen to a view that is incorporated into a car’s speed gauge.
OnStar will give “selected” developers access to a proprietary application program interface (API) to create mobile apps designed with OnStar’s suite of services, the company said. The first partner to use OnStar’s API will be RelayRides, a peer-to-peer car sharing marketplace.
In other company news, OnStar and Verizon Wireless are working on a second-generation connected research vehicle. The Chevrolet Volt research will receive streaming content from the Cloud enabled by the Verizon 4G LTE network and building on OnStar’s Advanced Telematics Operating System (ATOMS).
Audi said it is also offering a 4G LTE capability for its Audi Connect services. The company will continue to use Google Earth maps and will show a driver their destination in 3D imagery.
Telenav launched a new product called Scout at CES that can work with Ford’s SYNC connected unit. Scout provides customized navigation, entertainment, and convenience features for connectivity between a smart phone, vehicle, or a computer. Scout Key features turn-by-turn directions, real-time traffic, and estimated drive times to specific destinations at different hours of the day. Scout also provides personal local search based on a user’s preferences for entertainment, restaurants, and other points of interest once they arrive at a destination.
“It’s free on iTunes right now, but we plan to launch it on other platforms,” said Sooner Heath, Telenav customer solutions manager.
Indoor Positioning Looking to Get Bigger
Soon all malls, shopping centers, airports, sporting venues and other businesses will feature indoor maps, which could be the boost LBS needs, particularly if big businesses come on board and advertise. At CES, CSR said it is working with Micello, Google and Nokia Location and Commerce on indoor positioning, that combines Wi-Fi and GPS.
Some of the capabilities include being able to see what floor in the building you are walking in, pedestrian dead reckoning, and turn-by-turn walking directions, said Blake Bullock, CSR product manager.
Fernando Villasol, Nokia Location and Commerce director of content, says the advent of indoor positioning will soon open up new market opportunities for developers.
In other CES news:
Kenwood says its marketing agreements with Garmin continue to produce great aftermarket sales. The company rolled out its $1,500 DNX7180 Navigation/Multimedia Receiver, which features navigation from Garmin, including Lane Assist with Junction View. A built-in free feature is the Navteq Live Traffic for the life of the product.
Location Labs’ new Safely line of services include phone controls to allow parents to lock kids’ phones, a family locator, a teen phone lock during drives that is available on Sprint and T-Mobile phones, and a social monitor for Facebook.
Like TomTom’s discontinuation of the Tele Atlas name, Nokia has basically done away with the Navteq company name, though many in the industry still say “Navteq” when talking about the mapping side of the business.
There was an LBS and Safety Zone at CES that was in a terrible area in the back of North Hall. While there was a lot of foot traffic, looks like smaller and international companies were thrown in the back — not near the bigger auto players which would have generated more attention to the booths/companies. Overall, CES is more of a connected vehicle show than LBS…a change that has been happening for two years.
2011 was a decent year for the location-based services industry. It was an even better year if your company was lucky enough to get bought out by an ebay, Google or Intel. While acquisitions stood out as the key LBS news in 2011, privacy stood out as an ugly issue that threatened consumer acceptance. In addition, automobile manufacturers are viewing social media as a new profitable technology for vehicles and were trying to convince consumers that the connected vehicle is the way of the future.
This year featured a slew of location-based company acquisitions and consolidation — far more than in 2010. The acquisitions of such established location companies as Where and Telmap by eBay and Intel, respectively, at least show that bigger companies want that capability in their online offerings.
Google made many moves into the location business in the last two years — and really went crazy in 2011 with acquisitions. Google is trying to grab a large share of the European traffic market by offering real-time services in 13 European companies. Google shook up the navigation market with free navigation service for Android phones in 2009.
To top off a big year for Google, the company is taking its mapping technology indoors with the launch of Google Maps 6.0. Indoor mapping and positioning received big headway in 2011, and it was reasonable to assume that the 800-pound LBS gorilla, Google, would be a big player to entice big retail companies to come on board for location technology to allow customers to find products.
According to published reports, some of the big-box retail stores such as IKEA, Macy’s, Home Depot and Bloomingdales have been mapped. However, a lot of the bigger malls, and Target and Wal-Mart, have not been mapped.
The cool thing about the product is that it also tells customers what floor they are on in a building. The uncool thing about the product is that Google Maps 6.0 is only available for Android.
Google’s indoor mapping partners include 18 U.S. airports, which will open up more partners and LBS relationships in the future.
A look at all of Google’s location market moves, and analysis, in 2011:
Google’s major partners, who have more than 25,000 Google Maps application uses per day, will be charged starting next year. Some say it won’t hurt small companies much—and may even help companies who compete with Google. Either way, some say the decision was inevitable for companies making a profit–and using Google’s resources for free.
The recent $12.5-billion Google acquisition of Motorola Mobility has some industry experts saying that the location market piece of pie is getting smaller every time the search giant makes a deal. Many industry experts have said that the main makers of Google Android smart phones should feel challenged as well as the company has seemingly gone into business against them. Google is once more trying to corner more of the social shopping market by buying The Dealmap, a 15-month-old company that offers its own location-based daily deal service.
Google purchased Menlo Park, Calif.-based The Dealmap, a company that collects data from hundreds of sources and arranges deals by location, on its website and a smartphone application. The start-up, founded last year, has 15 employees and 2 million users, according to published reports. Google tried to buy Groupon for as much as $6 billion last year, and decided to launch its own service, Google Offers, in Portland. Google’s service has since expanded to New York and the San Francisco Bay Area.
More transition is happening in the LBS market this year — even at our deadline. As GPS World reported, LBS company Gowalla looks like it is shutting down by the end of January 2012, according to the company’s blog. Company president Josh Williams said he and his staff are now going to work for Facebook.
While some LBS analysts said this year that GPS technology, and its offshoot niche navigation capability, are just embedded widgets in the overall location market, others say they still are the driver to consumer awareness and acceptance.
“In my opinion, one of the biggest trends in 2011 included market acceptance — and demand — of GPS technologies. We are now seeing end-users demand GPS technologies in the workplace,” said Jonathan Hubbard, SpeedGuage CEO and co-founder. “In fact, truck drivers now say if you don’t have GPS-enabled automated logging of my work hours, or what we in the transportation sector call hours of service monitoring, then I won’t work for you. That’s a significant change in how GPS-enabled technologies were formerly viewed — more or less — for solely tracking purposes, and we see this trend only continuing and gaining momentum in the coming year.”
Other Markets and Issues Made Big Splash In 2011
In vehicle technology also made headlines in 2011 when automakers said they would be increasing social media and other capabilities for new car models. Because of larger screens going into many vehicles, LBS seems like a natural advertising fit, but Thilo Koslowski, Gartner vice president, said that car companies will developing market strategies along traditional display-type marketing models.
Koslowsi said the biggest competition the auto industry has is the smartphone or other consumer mobile device. “We will see growth in vehicle application on the Android platform, while Apple will be leveling off. [Research in Motion] will have a lower share,” he said.
The other big “issue” confronting the LBS industry is privacy, which became big news in May when it was revealed that location data was secretly stored in all iOS 4 devices. It was learned that Apple was storing a file with location data in every iPhone or iPad with iOS 4. These discoveries prompted Sen. Al Franken (D-Minn.), who was concerned that as many as 15 percent of users are children, to ask now-deceased Apple boss Steve Jobs about the operating system. In a letter to Jobs, Franken, who presided over hearings on location technology and privacy, asked why Apple consumers were not informed of the collection and retention of their location data, how frequently is a user’s location recorded, why is this information not encrypted, with whom has the information been shared, and what is the purpose of collecting the location data.
Apple contended that iOS devices are not logging the location of the user, but caching a database of Wi-Fi hotspots and cell tower locations around a user’s position. Some of these cell towers may be many miles away from the user.
In other LBS Insider news:
Veteran telematics vendor Cross Country Automotive Services and its subsidiary, ATX Group, which is a provider to BMW, Hyundai, Infiniti, Lexus, Rolls-Royce Motor Cars and Toyota, announced their new corporate brand name, Agero. Cross Country, which purchased ATX in 2008, says Agero will create products for auto manufacturers, insurance carriers and aftermarket providers.
GPS World Magazine is GPS-Wireless 2012’s official media partner. GPS-Wireless 2012 will be March 21-22 at the Hyatt Regency—San Francisco Airport.
LBS Insider will be covering the Consumer Electronics Show in Las Vegas next month. Please send me your news tips and releases.
It couldn’t stay free forever. Google’s recent decision to charge high-volume users may force some of the larger companies to look elsewhere for alternatives. In the meantime, attendees at two San Francisco Bay Area conferences learned that push location marketing is not the cool thing to be into, privacy still is a big deal that thwarts consumer acceptance…and that the word “experience” is being used too much.
SAN FRANCISCO — Google’s major partners, who have more than 25,000 Google Maps application uses per day, will be charged starting next year — a decision that was a hot topic at the Geo Loco conference here. Some say it won’t hurt small companies much — and may even help companies who compete with Google. Either way, some say the decision was inevitable for companies making a profit — and using Google’s resources for free.
“It’s really not going to affect a lot of people — just those at the over 25,000 uses a day threshold,” said J. Kim Fennell, deCarta CEO, on a Geo Loco panel. Fennell said he sees a lot of commoditization of the LBS space, from maps to navigation. “The big thing, now that maps are commoditized, is better local search capabilities for the consumer,” he said.
One panel member, Gary Gale, director of Places Registry for Nokia, disagreed, saying that while Google keeps on giving its location products and capability away for free, it may force companies to look elsewhere when it decides to charge them. “People don’t like change. Some people will look for alternatives,” he said.
According to published reports, high-volume websites will be offered Google Maps Premium, a paid service that costs $10,000 per year. Planned fees will be $4 per 1,000 page loads over the 25,000 per day threshold.
Google’s Bernardo Hernandez, head of global emerging platforms, told Geo Loco attendees that the company, which recently purchased restaurant guide publisher Zagat, says there are millions of Google Maps users worldwide each day. He said that heading use trends is the continued growth in mobile applications. “Phones are pocket guides,” he said in a reference to the Zagat purchase.
Facebook Debunks Push Location Marketing
If one looks beyond a young high-tech company speaker constantly saying the word “experience” (as in consumer experience or user experience), sometimes something important is said. Facebook’s Paul Adams, global brand experience manager, said that companies should not use push location marketing to consumers. Rather, they should have their friends and family tell them what products and services they should use.
Adams said that Facebook is the platform to do that — basically saying that the average Facebook user has 130-170 friends that equate into about 8,000 friends of friends, exploding into even larger numbers for friends of friends of friends (whew!).
In other Geo Loco news, location-based deals seem to be lackluster in revenue growth. Groupon Now’s location-based capability is only 1 percent of its revenue. “The motivation for merchants and consumers to participate [in Groupon Now’s program] is just not there. People just aren’t using it,” said David Hagreaves at the Geo Loco conference. Hargreaves, a consultant, said that the big ticket items that Groupon seems to be excelling at — restaurants, spa/beauty — are just not seeing the numbers for LBS.
Indoor Positioning Big Topic at Two Conferences
Indoor positioning capability, boosted by Wi-Fi and other technology, seemed to be the hot market topic at both CSR Locations and Beyond Summit 2011 and Geo Loco conferences. CSR rolled out its SiRFstar V and SiRFusion location platform at their conference.
The products fit in the company’s strategy of offering and enabling mainstream consumer location indoors or outdoors, said Kanwar Chadha, CSR’s chief marketing officer.
Years ago, it took a long time to get an outdoor position fix, much less a seamless handoff of a signal indoors. However, Wi-Fi technology, combined with satellite positioning, pedestrian dead reckoning (using MEMs sensors), and crowd-sourced location and aided data from a cloud-based server, has made accurate indoor positioning possible, CSR contends.
Such companies as Micello attended both the CSR and Geo Loco conferences to hawk products that use indoor positioning. Micello is working to offer developers access to thousands of indoor maps to enable applications for airports, trade shows, shopping malls and other complex indoor venues.
In other Locations and Beyond Summit news, privacy was a hot topic, though it is being labeled as a service provider problem, not a developer’s. “The industry has a lot more work to do in regards to privacy. The younger generation understands the implicit use of location — and privacy has been built into the infrastructure,” Chadha said. “We have no control of those elements. That responsibility belongs to the service provider.”
A CSR moderator, Tim Bajarin, president of Creative Strategies, said that the younger generation “scares the heck out of me” in terms of their willingness to embrace location services without care of privacy issues. “But having said that, you can’t beat the value of LBS when you need it,” he said.
In other conference news:
David Chiu, who spoke at Geo Loco and is running for San Francisco mayor, said there is big opportunity for companies who want to work with the city. He said buses don’t arrive on time — nor does the city know where they are most of the time.
James Urquhart, who spoke at the CSR conference and is cloud computing and virtualization marketing manager for Cisco, said that the industry has a rare and huge opportunity to reduce costs that directly affect profit and loss in the M2M space.
Duncan McCall, who spoke at CSR and is CEO of PlaceIQ, said that while location-based advertising has been promised for some time, there still are not enough location impressions. He says data is not yet aggregated together in a useful way.
While folks have been quick to point out that LBA is in its early stages, Alistair Goodman, Placecast CEO, at CSR, said that his company is seeing advertisers spend six- and seven-figures on campaigns in this space.
Kanwar Chadha, CSR CMO, said he does not like the term LBS, but prefers “location experience.”