Normally, my column following a webinar is dedicated to Q&A follow-up from the webinar. However, immediately following the April 22 webinar, I traveled to Phoenix, Arizona, to attend the ACSM/GITA conference, which I wrote about earlier this month.
This column is dedicated to answering questions I didn’t address during the webinar. Also, I always find the results from the polls I conduct during the webinar very interesting.
Poll #1: Have you or your work crews had to stop or alter your work pattern due to the lack of GPS satellites?

Total votes: 128, Yes: 73%, No: 27%
Gakstatter comment: This is consistent with other polls I’ve conducted regarding GPS satellite availability. The new GPS 24+3 configuration will help mitigate this problem. Read more about the new GPS 24+3 configuration in a three-part series I wrote earlier this year.
Poll #2: How often do you upgrade your GPS equipment?

Total votes: 113
Gakstatter comment: There’s no clear pattern here except to say that 46% of the users wait until at least 3 years before they consider upgrading their GPS equipment. That makes sense to me.
Poll #3: Does any of your GNSS equipment utilize GLONASS?

Total votes: 115, Yes: 39%, No: 61%
Gakstatter comment: When considering the result of this poll, keep in mind that there are very few “mapping-grade” receivers that are designed to utilize GLONASS. For example, there are very few, if any, sub-meter receivers that utilize GLONASS, primarily due to the lack of correction sources. SBAS doesn’t support GLONASS, DGPS (radiobeacon) doesn’t support GLONASS, and most CORS do not support GLONASS. Only recently did OmniSTAR begin supporting GLONASS. I think this trend will continue, although I doubt that SBAS or DGPS (radiobeacon) will support GLONASS in the foreseeable future.
Poll #4: Does any of your GNSS equipment utilize SBAS (WAAS/EGNOS/MSAS) as a primary source of corrections?

Total votes: 111, Yes: 60.5%, No: 39.5%
Gakstatter comment: This poll result doesn’t surprise me. Given that SBAS corrections are widely available, free of charge, reasonably accurate, and require no action by the user, it makes a lot of sense they are being used.
Following are some of the questions that were posed by the audience during the webinar:
Question #1: I am not sure, but when you say you’re “pushing” something out to us, it sounds like your trying to “push” something on us. Just a comment.
Gakstatter: I’m sorry about the webinar-speak. When I say “pushing the next slide,” that means I’m changing slides. I may change the way I say this. Thanks for your comment.
Question #2: Can you correct GLONASS signals with WAAS or other real-time technologies?
Gakstatter: WAAS (or any SBAS) doesn’t support GLONASS. Neither does DGPS (radiobeacon). This doesn’t mean that GLONASS measurement can’t be used, but you’ll be using uncorrected measurements to augment SBAS-corrected measurements. A case where it may be useful is when you’re mapping in an environment where there are a lot of trees. You might only have four GPS satellites visible that are being corrected via SBAS. In that scenario, there might be value in utilizing measurements from GLONASS satellites just to improve the PDOP, even though the GLONASS measurements are uncorrected.
Question #3: Do you feel manufacturers will begin to release lower-end mapping-grade GPS receivers with L2C and L5 functionality in the future?
Gakstatter: Yes, I do, but it will be a few years before there are enough satellites broadcasting an L5 signal. I think what you’ll end up seeing are inexpensive L1/L5 receivers (Galileo doesn’t support L2). They will not only be able to provide mapping-grade sub-meter, decimeter) but also RTK accuracies (cm-level). Since L2C and L5 are open civil signals, you won’t see the patent blocks that restrict competition for L1/L2 receivers like you do today.
I’m not saying L2C will not be supported at all. I think there will be L1/L2C/L5 receivers, but I think you’ll see L1/L5 on lower-end receivers.
Question #4: There is apparently some degradation of accuracy when using GPS and GLONASS for RTK. Have there been any rigorous studies quantifying this that you are aware of?
Gakstatter: I’m not sure I’d say I believe there is degradation in accuracy, but I wouldn’t count on GLONASS to improve accuracy. The value of GLONASS is improving productivity. Since it adds several satellite signals to the solution, it effectively eliminates GPS “brown-out” periods so RTK can be used 24/7. There was a rigorous study released by The Survey Association in the UK. The report focused on network RTK. They tested both GPS and GPS+GLONASS. You can download a copy of the report here.
Question #5: Does using GLONASS-capable receivers shorten the observation time required for fast-static points?
Gakstatter: My first thought is yes since generally more observables equates to shorter occupation time, but I would check with the manufacturer and follow their recommendations. Honestly, I’ve only used fast-static with GPS-only receivers so I don’t have any personal experience with your scenario.
Question #6: When is GLONASS-K launch scheduled? When can we receiver a valid CDMA signal?
Gakstatter: The first GLONASS-K satellite is scheduled for launch later this year. I haven’t seen a launch schedule beyond that. A representative from the Russian Space Agency is scheduled to present at the Institute of Navigation (ION) GNSS conference in September, so I’ll probably learn more at that point. However, it’s a lengthy process. It’s not just a matter of launching satellites. There are many other variables and unknowns such as the control segment and user equipment compatibility. I think it’s safe to say that we are a few years away from having a minimal GLONASS satellite constellation broadcasting CDMA.
Question #7: The visibility plots show one extra satellite in the “after” plots. Was that intentional? I would have expected there to be an improved number of satellites visible when one more was added to the plotted constellation.
Gakstatter: Good catch. In the “after” scenario, I set SVN-49 healthy, which it is currently not. The reason I did this was because SVN-49 is in an important slot in the 24+3 configuration. The status of SVN-49 is still undecided, but if they decide to not set it healthy they will move another satellite to take its place in the 24+3 configuration. If I would have kept it unhealthy in the “after” scenario, it would have only s
hown a 24+2 configuration. Clear as mud?
Question #8: Is 24+3 the solution to the blackout problem from now to 2014 stated by the GAO Report from last year?
Gakstatter: The definition of the 24+3 configuration had been around before the GAO Report. Personally, I don’t think the GAO Report had anything to do with 24+3. The 24+3 configuration just helps optimize the current satellites in orbit, whereas the GAO Report addresses the attrition of GPS satellites outpacing the addition of GPS satellites.
Question #9: Cellphone question: Is the move to 24+3 likely to degrade indoor GPS coverage – fewer peak sats => lower probability of seeing 4+ sats indoors?
Gakstatter: Interesting question. My first thought is probably so, although I think it would be a temporary problem. Assuming Galileo keeps pushing forward, that would be a big help for cellphone users, both indoors and outdoors.
Question #10: GPS Satellites are getting beyond the design life…is the USA behind schedule in satellite updates?
Gakstatter: GPS satellites have been unbelievably reliable. PRN-24, the oldest operational satellite, has been in operation since August 30, 1991. Since they have been so reliable, there hasn’t been as much pressure to launch GPS satellites. Prior to the 24+3 initiative, the minimum guaranteed constellation was 24 satellites. It costs $50-60 million to build each GPS satellite and another $150-200 million to launch it. With the GPS constellation hovering around 30 satellites these past few years, and government budgets tightening, I think it’s clear that the pressure to save money has resulted in a more relaxed launch schedule.
The delay in the Block IIF satellite (the first one being launched this week) was not a result of the above, but rather technical and program management mis-steps. The GAO Report was particularly critical of the IIF development.
Question #11: Do you see any future for ground-based free systems such as those broadcasting corrections in LF/MF radio, like the Coast Guard broadcasts?
Gakstatter: There is an interesting debate between DGPS (what you mention) and SBAS. The DGPS infrastructure has been in place and working reliably for mariners for better than a decade. Funding for DGPS seems solid for marine navigation, but less stable for inland-based applications (like the U.S. NDGPS system). I think the future of DGPS for mariners is solid for the next 10 years. Once there is a full constellation of satellites broadcasting GPS L5, the value of DGPS will be questioned.
Question #12: Will WAAS, EGNOS, etc. be needed after L1/L5 receivers can measure the iono effects themselves?
Gakstatter: I think it comes down to integrity. If the L1/L5 combo can deliver integrity that safety-of-life applications require (such as aviation), then one has to question the value of SBAS. My gut feeling is that the L1/L5 combo can’t and that some sort of augmentation will be needed to attain the integrity level required.
Question #13: What are your thoughts concerning Compass? Do you feel this will eventually be applicable for public use as part of a functioning GNSS?
Gakstatter: Compass is the GNSS wildcard. Since the Chinese aren’t particularly forthcoming with their plans, it’s hard to say. But I’m not sure that matters. With a full constellation of GPS, GLONASS (CDMA), and Galileo satellites in the future, that’s around an average of 25+ satellites in view at any one time during the day. If China doesn’t play well with others in a timely fashion, the user community won’t care what Compass brings to the table.
Question #14: If my current GPS receiver is not ready for L2C and L5, do I have to buy a new GPS or I can upgrade software/firmware later so that I can still use it?
Gakstatter: You’ll have to trade-in. Some might be upgradable to L2C, but L5 is a different story. It’s a completely different frequency. That affects the receiver as well as the antenna.
I wasn’t able to address all of the questions here, so look for more in the next newsletter. Particularly I’ll cover some discussion about reference frames, SBAS and L5.
Look for announcements in the next day or so about the Block IIF GPS satellite launch. It’s scheduled for Friday, May 21. It’s a new era with the first GPS satellite to broadcast an operational L5 signal.
Thanks, and see you next time.
Follow me on Twitter at http://twitter.com/GPSGIS_Eric


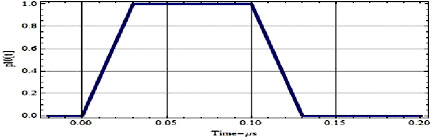
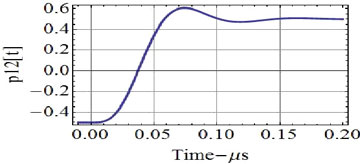
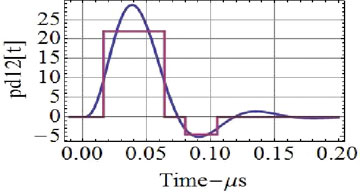
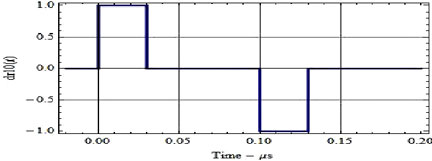 FIGURE 2. Trapezoidal PN (1 Mcps) waveform pulse and its time derivative with a 0.1-microsecond rise time.
FIGURE 2. Trapezoidal PN (1 Mcps) waveform pulse and its time derivative with a 0.1-microsecond rise time.![FIGURE 3. Discriminator channel, d[e], and (bottom) discriminator output, R[e] Rd[e], for the 1.0 Mcps PN with the optimum 0.1-microsecond reference and the 0.1-microsecond rise-time trapezoidal waveform.](https://stage.globalpositioningnews.com/wp-content/uploads/2010/05/EA-3.jpg)