A couple of weeks ago, I participated in a roundtable discussion at the Land Surveyors Association of Washington (LSAW) annual conference on the subject of RTK Networks (RTN). Gavin Schrock, administrator of the Washington State Reference Network (WSRN), did a good job of selecting a number of industry folks who’ve got personal experience with RTN to be on the panel.
I always enjoy listening to heavy RTK users about their thoughts, their procedures and how they arrived at them. We danced around a number of subjects with one being the “RTN’s biggest flaw.” My first thought was the communications link. That always seems to me to be the biggest problem with RTK in general. When it’s not working, the first thing I check is the communications link.
“Wrong,” said the panel members.
According to them, the biggest weakness of RTK/RTN is the vertical accuracy. They want vertical accuracy to be equal to horizontal. Duh, why didn’t I think of that? My only excuse is that I’m so used to expecting vertical to be 2x-2.5x worst than horizontal that I already have my expectation set and don’t see it improving until we have a lot more satellites in orbit that will bring very low VDOP values. But I guess if I really think about it, vertical accuracy is the Achilles heel (well, maybe behind the line-of-sight limitation).
It was great to hear thoughts from real-life RTK users. Two panel members in particular espoused the value of RTK/RTN in their operations.
Douglas Casement, PLS, a solo land surveyor using a Leica receiver on the Leica Spider Network, talked about the efficiency of RTK/RTN and doing projects in a half-day that would have taken a couple of days using conventional surveying equipment with a two-man crew.
Mike McEvilly, PLS, works for a surveying/engineering firm in Washington State. He uses the WSRN for RTK corrections. He talked about using RTK on most of their projects in one way or another with the limitation being the vertical accuracy on some projects. I asked him if he had any problems with “brownouts” (lack of satellites), he said he didn’t, but then I found out he is using GPS+GLONASS receivers.
Larry Signani, PLS, is responsible for the geodetic framework behind three RTNs in Washington State. He talked about how he constrains the networks and ties them into the National Spatial Reference System (NSRS). This is the behind-the-scenes grunt work that really makes an RTN perform. It really makes me wonder how other RTNs handle this.
Gavin spoke a bit about procedures and the testing they’ve done, with RTN rovers, on NGS Calibrated Baselines (CBL) during the life of the WSRN. They’ve got a myriad of data that they’ve collected and used to develop their RTK operating procedures. It’s fascinating to look at the data they’ve collected…that’s another article altogether, but I will share with you a slide that summarizes their RTK field practice.
There’s always been a lot of discussion about RTK procedures and occupation times. Last year, I wrote an article called “What’s Your Occupation Time?” that garnered quite a few e-mail responses. I want to address that subject again in the next couple of months.
In the meantime, for those who haven’t read it, an extensive report was published by the UK Survey Association regarding RTK performance and procedures. I highly suggest downloading and reading the report. You can download it by clicking here. I would also suggest downloading and reading the National Geodetic Survey’s User Guidelines for Single Base Real Time GNSS Positioning. Although it doesn’t agree with the UK Survey Association on the time splits (the NGS suggests four-hour time splits) for setting project control, it is the most complete “RTK User’s Guide” I’ve run across. I think it’s a must-read for any RTK beginner as well as a refresher for veteran users.
I could write a lot more about this, and will over the coming months. I’d love to hear about your RTK field procedures and how you arrived at them. E-mail me at [email protected] and let me know your procedures for setting control and topo surveying.
Thanks, and see you next time.
Follow me on Twitter at http://twitter.com/GPSGIS_Eric
Edit: Link updated to User Guidelines for Single Base Real Time GNSS Positioning. Previous link was to a draft version of the document.
Thank you for making “GPS for GIS Data Collection – 101” one of the most well-attended webinars we’ve done. It’s the first that was co-hosted by GPS World magazine and Geospatial Solutions online. If you don’t subscribe to my Geospatial Solutions Weekly newsletter, you might want to consider it as I venture into GIS and broader issues that I don’t have the space to cover in this newsletter. Also, the webinar had a record number of sponsors. Thanks to Hemisphere GPS, Laser Technology, and First American. Those folks make it possible for us to bring these webinars to you free of charge.
As customary, the newsletter after the webinar is dedicated to addressing some of the questions and posting the results from the polls I took during the webinar.
Poll Results
I conducted three polls during the webinar. I received some feedback that we aren’t giving folks enough time to respond to the polls. We’ll pay more attention to that in future webinars and allow more time. Following are the results:
Poll #1: Do you currently use GPS for collecting GIS data?
Yes: 68.5%
No: 31.5%
Total votes: 165
Poll #2: What accuracy do you require in a GPS mapping system?
Question #1: How many satellites are transmitting and how many are just for replacement purposes?
Gakstatter: There are 30 operational GPS satellites. Currently, they are configured in a 24-satellite configuration so six of them are orbiting as “back-ups.” There are also three satellites, I believe, that are in inactive reserve that could be brought back into service if required.
However, as covered in my last three newsletters, the DoD is transitioning the GPS constellation to a 27-satellite configuration to improve satellite visibility to users. The process of transitioning started in January will take up to two years to complete. Please see the following articles for details on the 24+3 configuration:
Question #2: I do have a question, but it will take too long right now. How do I contact you later?
Gakstatter: Please feel free to e-mail me with questions any time…[email protected]. I learn a lot from your questions.
Question #3: What about use of iPhones or Blackberries with GPS embedded in the device?
Gakstatter: As smartphones become more powerful and prevalent, I think the use of them for GIS data collection will increase. I have two comments on this:
To this point, the ability to run GIS data collection software is hit or miss. Some smartphones just don’t have the resources (memory, processing speed) to handle running the more powerful data-collection software on the market. Of course, with technology advancing that may not be as much of an issue in the future, and it’s possible that GIS software manufacturers will write streamlined software specifically for smartphones.
The accuracy of GPS receivers built into smartphones will always be pretty rough. I’d put it in the 5+ meter category and I don’t think it will get much better, so adjust your expectation accordingly. However, using Bluetooth you might be able to “tether” the smartphone to a higher performance external GPS receiver.
Question #4: Is there a place for consumer-grade receivers in GIS data collection?
Gakstatter: Yes, I wrote an article on this last year. You can read it here…
Please don’t hesitate to e-mail me more questions about this that may not be answered in the referenced article. I’ve been thinking about a follow-up article on this subject. Question #5: What accuracy would you expect to record from a GPS handheld unit?
Gakstatter: There are high-performance handheld GPS receivers that can deliver centimeter-level positions and there are consumer-type handheld GPS receivers that delivery 5+ meter accuracy. This is typically a direct relationship between accuracy and cost (you’re not going to get sub-meter accuracy from a $200 receiver).
The best way to approach this is to decide what accuracy you require (cm-level, one foot, sub-meter, 1-3 meters, 3-5 meters, 5+ meters) and look at the budget you have available. You might want to take a look at the webinar I conducted last year titled “A Buyer’s Guide to GPS/GIS Mapping Equipment” and a newsletter article I wrote around the same time titled GPS Receivers for GIS Data Collection.
Question #6: We have a Topcon GMS-2 unit using an exteral antenna on a range pole similiar to one of the pictures you had in the presentation. How does the height of the range pole with the external antenna affect the X-Y position? Or does it? Thanks.
Gakstatter: The value of the range pole is that it gives the GPS antenna a clear view of the sky (above your head and other local obstructions). It can only improve your X-Y position. I don’t know how many times I’ve seen users hold a handheld GPS receiver up against their chest, effectively eliminating the use (and degrading accuracy) of GPS satellites behind them.
Question #7: For area determination which is preferred: static or dynamic?
Gakstatter: Personally, I would use dynamic unless you’re talking about a very small parcel of land (less than an acre). I’ve seen a number of reports on this and I believe all of them used dynamic data collec
tion with pretty reasonable results. In other words, I don’t think static buys you much in terms of acreage precision. However, I’ve been in circumstances where I used a combination of both such as when I know there’s a reasonably straight line between two vertices, but it would be very difficult to walk a direct line between them. In that case, I might use static for that leg of the traverse.
Question #8: I thought that PDOP was Positional Dilution of Precision.
Gakstatter: Several of you busted me on this. I mis-typed the presentation slide. I wrote Precision Dilution of Precision, which doesn’t make any sense. It should have been Position Dilution of Precision (PDOP). The horizontal component of PDOP is HDOP (Horizontal Dilution of Precision). The vertical component of PDOP is VDOP (Vertical Dilution of Precision).
Click here for a Wikipedia link that provides a little more information on GPS DOPs.
Question #9: Explain limitations of what type of project you cannot do if not a licensed surveyor.
Gakstatter: Because local laws vary widely, it really depends on where you are working. Even within a country like the U.S., each state has its own statutes that define the roles of the land surveyor.
In some areas, activities as simple as GIS data collection must be supervised by a licensed surveyor. In other areas, high-liability activities such as construction staking can be done by virtually anyone.
Question #10: Could the steel plate in my head cause multipath or obstruct signals when I use the integrated antenna?
Gakstatter: I can safely say (tongue in cheek) that in 20 years of GPS product development, conducting workshops/seminars, attending conferences, and performing GPS fieldwork, I’ve never heard this question. I’m speechless. :-)
Question #11: A presumption that we should avoid is that by default “GIS data collection” implies low accuracy. This is simply not true. Position accuracy is independent of GIS. GIS can handle any level of accuracy the user desires. There is no such thing as a “GIS-grade” or “GIS-accuracy” survey. What relationship does GIS have with accuracy?
Gakstatter: I think Guest Commentator Craig Greenwald and I covered this well in the webinar, but it’s good to reinforce the point. I cringe when I hear someone say GIS stands for Get It Surveyed because it implies that the quality of a GIS is dependent on accuracy. It’s not. In some cases, +/- 500 feet. accuracy is perfectly fine for analysis in a GIS. The accuracy required by a GIS totally depends on the type of analysis you are conducting. Many surveyors typically think of GIS in terms of a land record (parcel) mapping system, but GIS is used for so much more than that. You don’t need cm-level accuracy to find the optimal location for the next McDonald’s restaurant within a city.
Question #12: Do you plan on conducting a webinar that will discuss strictly GPS, i.e., RTK vs. static, data reduction, post processing, etc.
Gakstatter: Yes, if you’re not subscribed to the Survey Scene newsletter, please sign up for that here as well as the Geospatial Solutions Weekly newsletter on the same sign-up page. The price is right…free. You can also look at the webinar archives where I have covered some of these subjects before. I’m also scheduled to conduct at least three more webinars this year (next one in May/June – topic not yet determined).
There were many other questions and I’ll continue including answers to them in the mid-March Survey Scene newsletter. Also, I suggest you sign up for my Geospatial Solutions Weekly newsletter (GSS Weekly) as mentioned above as I tackle GPS/GIS-related issues there, too. Next week, in the GSS Weekly, I’ll continue my discussion on the roles of the surveyor and GIS professional.
At the start of a new decade, let’s examine the state of the GNSS consumer market and technology. In the December 2009 issue of GPS World, I described the developments that put GPS in cell phones over the last decade. That technology revolution has brought GPS a very long way. Having come this far, we can ask that most famous of all navigation questions:
Are we there yet?
In this column, I focus on the question for the consumer segment of GNSS. Has the consumer market reached the point we expected it to be by now? Has the technology reached levels we anticipated?
The cell-phone GPS revolution began with the catalyst of U.S. E911 legislation, which mandated that when an emergency (911) call is made from a cell phone, the location of the cell phone must be provided. Among several competing location technologies, GPS proved to be the big winner, thanks to seven technology enablers: assisted GPS, massive parallel correlation, high sensitivity, coarse-time navigation, low TOW, host-based GPS, and RF-CMOS.
All of these together enable very low-cost implementation of GPS in cell phones, even phones on networks such as GSM and W-CDMA that do not have fine-time synchronization (that is, they are not precisely synchronized with the GPS system). GPS is now found in roughly 500 million phones in use today.
Four Milestones. From a consumer market perspective, we have exceeded forecasts. From a technology perspective, we have kept track with Moore’s law. Chips and receivers are cheaper than expected — because, as well as Moore’s law, we have seen greatly increased volumes and competition. Low-cost chips have not come at the expense of performance; in fact, the opposite — as chips have evolved, they have become less costly and better performing.
Small, cheap antennas have affected performance, but given the same antenna, I will demonstrate that a receiver with a single-die GPS chip costing less than $4 can outperform a $19,000 receiver.
This sounds paradoxical, even impossible — indeed many of you may be penning letters to the editor right now! But the time-to-first-fix, sensitivity, and urban-accuracy data will prove my point.
As a consequence of chip evolution, we are reaching plateaus of development for GPS-only systems. However, there remain many problems to solve, especially in urban canyons and indoors. These problems may never be solved with GPS alone, or with any single system alone. This decade will be characterized by GPS-plus; the days of GPS-only will soon recede into the past.
Don’t interpret this as a failing of GPS — quite the opposite. Because GPS-only systems have worked so well, they have found their way into half a billion cell phones, and we are boldly taking GPS to places no navigation has gone before. As we do, we start to encounter the limitations of GPS-only performance.
We will see the proliferation of GPS-plus: GPS+MEMS, GPS+Wi-Fi, GPS+NMR, and GPS+GLONASS, Compass, QZSS, and Galileo. The winners will be those with the greatest levels of integration. To paraphrase Winston Churchill, this is not the end of GPS, it is not even the beginning of the end. But it is, perhaps, the end of the beginning.
GNSS Consumer Market
For market forecasts made a few years ago, we can look at summaries provided in GNSS Markets and Applications, by Len Jacobson: a 2006 Frost & Sullivan report estimated the market for PNDs and handheld devices (not including cell phones) in 2010 would be $2.7 billion, with 8.3 million units, at an average selling price (ASP) of $325. In fact, this market today is approximately $6 billion, with 40 million units, at an ASP of $150.
Twice the Size. The consumer market, not including cell phones, is twice as big (in dollars) as forecast just a few years ago, even though prices are less than half forecast. Unit sales are more than four times forecast.
For the cell-phone market segment, in 1999 when the E911 rules were enacted in the United States, it was anticipated that A-GPS would be adopted only in fine-time (synchronized) networks, such as Verizon and Sprint CDMA. In coarse-time (non-synchronized) networks such as GSM, the expectation was that terrestrial wireless location techniques, such as time-difference-of-arrival (TDOA) and enhanced-offset-time-difference (E-OTD), would dominate. Today, only a few niches use TDOA, E-OTD is extinct, and GPS rules in coarse-time networks worldwide, including GSM in Europe and North America, and W-CDMA in Japan.
The consumer market, in particular the cell-phone market, has grown so rapidly that more receivers have been built in cell phones in the last three years than all other GPS built, ever. Today, L1 C/A-code GPS accounts for more than 99 percent of all GNSS receivers manufactured each year.
From a consumer market perspective, have we reached the point we expected to be by now?
Yes!
Not only have we arrived, we have far surpassed expectations.
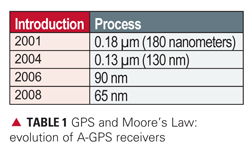
GPS and Moore’s Law
Moore’s law says that for a given number of transistors, the chip size will halve every two years. Table 1 shows what this looks like in practice. For a particular class of GPS chip, the A-GPS receiver with massive parallel correlation, it shows release dates of different generations of these chips, and the technology process, which is the linear dimension of a single gate on the silicon die. As this dimension reduces to 70 percent of the previous value, the 2-dimensonal chip size reduces by 2 times. You can see Moore’s law in action here: approximately every two years, the technology process moves to the next level, and the chip size reduces by 2X. People are now talking about GPS chips in 45 nanometers, the next step.
For a comparison, consider the Broadcom BCM 4751 chip, designed for cell phones. This chip is 2.9 X 3.1 millimeters, the size of the letter B on this page. This is a single-die host-based GPS/SBAS receiver, including RF front end, low-noise amplifier, baseband, and power management unit. Ten iterations of Moore’s law have passed in the last 20 years. The same chip, had it been built 20 years ago, would have been 210 times (a thousand times) bigger.
There were never chips that big. GPS chips aren’t just getting smaller with Moore’s law, they are getting vastly more complex and more capable.
Performance
At an elemental level, a GPS receiver does just three things: it starts, it tracks weak signals, and it computes position, velocity, and time. Strip away the obfuscating details, and performance may be summed up by: how fast, how sensitive, how accurate.
Since the 1990s, time to first fix ( TTFF) and sensitivity have improved dramatically, thanks to the seven technology enablers discussed earlier. TTFF for assisted cold starts, or unassisted warm starts, is now as good as one second, even without fine-time. This is a 45X improvement on typical GPS performance of the 1990s. Sensitivity increased roughly 30X (to -150 dBm) in 1998, then another 10X, (to -160 dBm) in 2006, and perhaps another three times to date, for a total of almost 1,000X extra sensitivity.
What about accuracy?
Some perceive low-cost chips as synonymous with low accuracy. This is not true. It is true that small, cheap antennas reduce accuracy; but given the same antennas, the lowest cost receivers on the market today will outperform the most expensive in typical environments where cell phones are used. The following figures show data to prove this point.
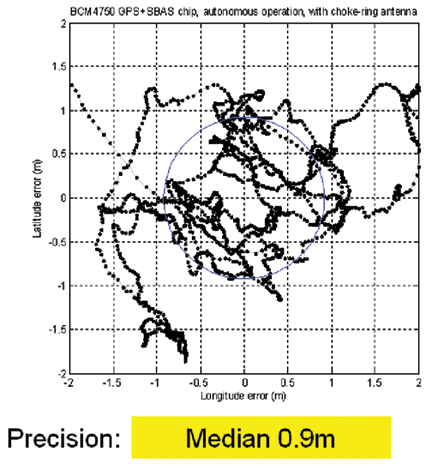
First we connect one of the smallest, lowest cost GPS receivers t
o one of the best antennas, a choke ring, on a rooftop with a clear view of the sky. Figure 1 shows the scatter of positions. The blue circle shows the median distribution, which is 0.9 meters for this dataset of 2000 fixes.
FIGURE 1a. Low-cost GPS with large, rooftop antenna.FIGURE 1b. Survey-grade GPS with large, rooftop antenna.
The adjacent plot shows the positions obtained from a $19,000 survey-grade GPS receiver, connected to the same antenna. The survey-grade GPS, with a median distribution of 0.3 meters, shows a 60-centimeter advantage over the cell-phone GPS, or maybe a 3X advantage depending on how you look at it. But don’t get too hung up on this result, because this is neither the typical consumer scenario (on a rooftop with choke-ring antenna), nor the main challenge facing us today.
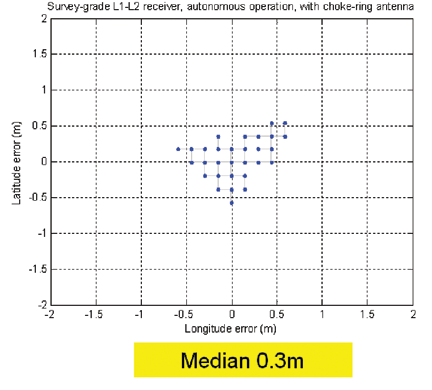
Next we look at the accuracy achieved with a more typical consumer antenna, in a more typical environment. Figure 2 shows the positions obtained in downtown San Jose with an active patch antenna, such as found in PNDs. San Jose is a fairly typical U.S. city, not the hardest place to use GPS, but not the easiest either. Lightstone Alley, adjacent to tall buildings, is only five meters wide.
FIGURE 2. Performance of cell-phone GPS (white) versus truth-reference system (blue). Median accuracy 4.4 meters, 67 percent 5.6 meters, 95 percent 11.2 meters.
To evaluate accuracy we used a truth-reference system combining GPS and a tactical-grade IMU with ring laser gyro to produce the blue dots on the figure. The white dots are the low-cost GPS positions. Most of the time, the white dots appear to be on top of the blue, but occasionally you see some separation, and there the red lines show the horizontal error. The median horizontal error is 4.4 meters.
Figure 3 shows the comparison of low- and high-cost receivers, with the survey-grade receiver connected to the same patch antenna as the cell-phone GPS. There are many position gaps from the survey-grade receiver, and the position walks around when the vehicle is stationary (at the intersections, bottom left and top of the figure). This is because of the weak signals available in the urban environment. But don’t get too hung up on this result either, since we are still not at the real challenge of consumer GPS: location in severe urban canyons, such as San Francisco, New York, Chicago, Shanghai, Taipei, Shinjuku, and similar. In these, typically, only one or two GPS satellites can be seen directly. Other satellites may be tracked, but only by observing purely reflected signals. This is not classic GPS multipath, the combination of a direct and reflected signal; instead this is the combination of nothing but reflected signals. The direct signals are usually completely blocked by many buildings, and are not observable at all. So the whole premise of GPS — observing range from time of flight — breaks down, and it is very difficult to get good accuracy.
FIGURE 3. Comparison of cell-phone (left) and survey (right) receivers, both with patch antenna
Figure 4 compares the cell-phone GPS with the survey-grade GPS, connected to the same small antenna, under such circumstances in San Francisco’s Financial District. There are no fixes at all from the survey-grade receiver. Why?
FIGURE 4. Cell-phone (left) and survey (right) receivers, in severe urban canyon
In Montgomery Street, there was only one directly visible satellite, with a signal strength of -132 dBm. All the other satellites were at -140 dBm or weaker, and traditional GPS receivers cannot acquire signals at this level. Hence the only receivers that work in this environment are modern high-sensitivity receivers most commonly found in cell phones.
You can see that the move to lower-cost receivers has not come at the expense of performance. In fact, the opposite: TTFF and sensitivity have improved dramatically, while accuracy has not been compromised, and is in fact much better in urban environments than legacy receivers, and even modern survey-grade receivers.
But are we there yet?
Although the consumer GPS market has irrefutably arrived, from a technical perspective the answer is more nuanced. Consumer GPS technology has made tremendous leaps forward. But precisely because of these improvements, we are taking GPS where it was never expected to go. It is no longer enough for GPS to work indoors (which it can). The demand is now for it to work as well as if it were outdoors (which, presently, it cannot).
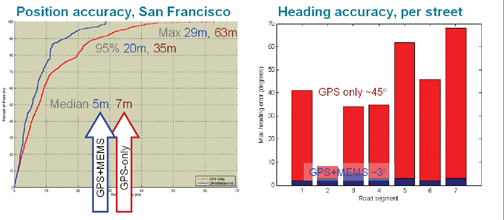
Performance improvements seen with GPS-only will almost certainly not continue at the recent rate. We do not anticipate yet another 45X improvement in TTFF, or another 30 dB of sensitivity, for GPS alone. However, we do expect order-of-magnitude performance increases with the addition of other technologies. Figure 5 shows data from a TomTom 950, a GPS+MEMS containing the same GPS chip used in the earlier tests, MEMS accelerometers, and MEMS rate gyros. When tightly integrated and tested in the same deep urban canyons of San Francisco, the effect on position is good: median accuracy improved by 30 percent, worst-case errors are more than halved. But the result on heading accuracy is especially dramatic.
FIGURE 5. PND position accuracy (left), and heading accuracy (right), San Francisco
The bar graph shows the worst-case heading accuracy in each street. With GPS-only (red), the worst-case error is around 45 degrees, a familiar result to anyone who has used any GPS-only device in a similar environment: sooner or later the map will veer erroneously. However, with the integration of the MEMS rate gyros (blue), the worst-case heading errors drop to around 3 degrees, a 15X improvement in a key metric, similar to the improvements of the last decade, but now thanks to the effect of GPS-plus.
We will soon see GPS-plus many other technologies: Wi-Fi, NMR/MRL (power measurements from GSM and 3G phones), and of course GPS+GLONASS, Compass, QZSS, and Galileo. Because many mobile devices now include GPS, Wi-Fi, and 3G, there is a natural path for the evolution of GPS technology to include Wi-Fi and MRL measurements.
There is a also natural trend to source different radios from the same chip supplier. After all, why would you wish to undertake a do-it-yourself effort at removing co-existence issues in different radios, when a chip supplier has already done it for you?
Looking forward, it is very likely that this new decade will be characterized by GPS-plus other technologies, and the winners will be those with the greatest levels of integration.
Frank van Diggelen is senior technical director of GPS systems and chief navigation officer for Broadcom Corporation. He holds more than 45 U.S. patents, has a Ph.D. in electrical engineering from Cambridge University, and is the author of A-GPS: Assisted GPS, GNSS & SBAS.
Not “fly by,” but “apply.” As in W. Somerset Maugham’s advice to aspiring young writers: Apply the seat of the pants to the seat of the chair.
Get grounded. Confront the blank page, the typewriter, or the less preferable modern equipments (because instant electronics short-circuit orderly brain function) for a period of silence and contemplation. Above all, think. Then, and only then, communicate.
Some serious word-eating now ensues. In last month’s editorial, I faulted the Architecture Evolution Plan (AEP) GPS ground control software update 5.5C for wreaking havoc with fielded receivers, both military and civil. Website news stories that I subsequently posted bore headlines driving this misconception home.
I was wrong. Subsequent analysis by more knowledgeable and expert people has established that, yes, havoc was wreaked, but not by the software update. The deficiency resided in the factory-installed software of the respective receivers. See The System story on page 12 for details.
In my only defense, I state that I was groping in the dark. Very incomplete word, secondhand no less, arrived just as we were preparing the issue for press. No official announcement came from the Air Force during the days that followed. We understand that internal brouhaha was brewed, stern words were uttered and written, but ultimately it was determined that the fault lay in the user segment, not with ground control or vendors thereto.
We have it on good authority that the GPS Wing maintains, and will presumably continue to maintain, that the AEP update was absolutely perfect with no software glitches. But the Wing also realizes that none of the receiver manufacturers had any idea how the update was going to be implemented, as in what pages would be affected, and if there would be new data in places where it had not been loaded before.
A grudging admission emerges that there may be some ambiguity in the receiver interface control documents (ICDs), and that those may need some tightening up sometime soon.
We return to the theme of communications, in this case clear ones between the GPS Wing and the various user communities: civil, commercial, and military. For GPS to maintain its place as the world’s gold standard, there must be clear — and timely — communication between the Wing and its customers. All customers. Dual-use.
So far, there’s no No. 2 system trying harder in this regard. But why leave the door open?
A controversial suggestion: beta versions of future AEP updates could be released to a predefined subset of receiver maufacturers, who would test and report back concerning any glitches that occurred when their receivers saw the new software and simulated nav message for the first time.
I didn’t plan it this way, but my coverage of GPS 24+3 turned out to be a three-part series, with this column being part three. One reason it turned into a three-part series is because I’m learning more about it along the way, but its mostly because details weren’t released all at once.
The good news is that I (along with help from others….thank you) was able to generate an almanac that simulates 24+3 reasonably well. The idea behind doing this is that I could compare the satellite visibility plots in satellite visibility software using both the original almanac (I chose January 1, 2010) and a GPS 24+3 modified version of the same almanac. For those plots, I could present to you what you can realistically expect the improvement to be with the 24+3 satellite configuration.
A quick note before diving into the 24+3 configuration. At the end of this column is a brief discussion about solar activity and GNSS/GPS. Last week, there was a solar event and some users have voiced concerns about that. I’ve addressed those in a section at the end of this article.
24+3
You can view my first two columns relating to the 24+3 configuration by following these links:
I’d like to update you on some bits of information that I’ve learned about 24+3 since my last column. I asked the HQ Air Force Space Command some questions about 24+3 and they kindly responded.
EG: Will the satellites (SVN24, SVN26) remain healthy during their repositioning journey?
HQ AFSC: Yes. The satellites will be set unhealthy for the initial Delta-V, but will return to healthy status approximately 24 hours after initiation of the Delta-V. Initial Delta-V for SVN24 was accomplished on 13 Jan 10 and returned healthy on 14 Jan 10. SVN 24 will take up to a year to reach its final destination. Initial Delta-V for SVN 49 was accomplished on 21 Jan 10 and will arrive at its expanded position in Jun 10. Initial Delta-V for SVN26 will begin early Feb 10.
EG: Why the two-year timeframe to realize the benefits when all repositioning will be complete in 12 months?
HQ AFSC: The two-year timeframe is a conservative estimate which takes into account potential operational necessities which could extend the time required for completion. We must take a disciplined approach to cover possible failures and ensure continuity of coverage during the transition.
We will be adding GPS IIF vehicles to the constellation and older vehicles may fail during the transition timeframe. As vehicles are added and removed, the current plan is subject to change in order to provide the best service to all civil and military users. Some of these decisions could require additional time to complete the expanded constellation. However, benefits will likely be realized well in advance of 24 months.
EG: What is the reasoning behind using SVN49 as a key component of the 24+3 configuration since it won’t benefit a significant portion of the civilian user community, namely aviation and marine navigation as well as other SBAS (WAAS) and DGPS users? In my understanding, the FAA’s and the Coast Guard’s user bases are primarily single-frequency pseudo-range, users who won’t be able to use SVN49.
HQ AFSC: SVN49 was selected because it is a brand-new satellite with four good clocks. Although issues with SVN49’s navigation signals may make it unusable for all civil use, it could still put out a valid set of signals for military use. The Air Force team is continuing to work “open book” with civil and industry GPS experts to determine the possible outcome of SVN49. Although SVN49 is not currently healthy, GPSW and 50th SW are actively working a mitigation that may allow setting the vehicle healthy in the future. As a mitigation in case we are unable to set SVN49 healthy, SVN30 will be rephased to the same slot following a successful launch and on-orbit checkout of IIF-1. We expect to have either SVN30 or SVN49 healthy and broadcasting from the expanded slot within a 24-month timeframe. At this time, no decisions have been made and no options have been ruled out regarding SVN49.
Satellite Visibility Plots
As promised, I’ve (with help) been working on creating an almanac that simulates the 24+3 constellation. My goal was to be able to show you what the benefit to you will be with the new GPS 24+3 satellite configuration.
The method I used was to modify an almanac from January 1, 2010. The reason I chose that day is because it was before the satellite repositioning began. The first satellite began its repositioning journey on January 13, 2010.
Within the almanac, I adjusted the position of three of the satellites in the almanac to reflect the new orbit locations they are going to assume.
SVN 24 is moving from slot D5 to slot D2F
SVN 26 is moving from slot F5 to slot F2F
SVN 49 is moving from slot B5 to slot B1F
Following is a graphic I’ve published before that illustrates the satellite repositioning:
Using the original January 1, 2010, almanac to plot a satellite visibility chart and then using the 24+3 modified almanac to plot another chart for the same location, I was able to generate the following comparisons between the current GPS satellite configuration and the 24+3 satellite configuration. Please note the following:
A 15-degree elevation cutoff was used to account for obstructions (terrain, buildings, trees).
The modified almanac does not take into account the other three satellites that are being slightly repositioned (SVN46, SVN55, SVN56) so the modified almanac represents a worst-case scenario.
The original almanac is the first plot. The modified 24+3 plot is directly below it.
Portland, OR USA (N45 41, W122 11) Original Almanac:
Portland, OR USA (N45 41, W122 11) 24+3 Almanac:
Miami, FL USA (N25 46, W80 11) Original Almanac:
Miami, FL USA (N25 46, W80 11) 24+3 Almanac:
Tokyo, Japan (N35 42, E138 30) Original Almanac:
Tokyo, Japan (N35 42, E138 30) 24+3 Almanac:
London, England (N51 30, W000 07) Original Almanac:
New Dehli, India (N28 54, E77 13) Original Almanac:
New Dehli, India (N28 54, E77 13) 24+3 Almanac:
Rio De Janeiro, Brazil (S22 27, W42 43) Original Almanac:
Rio De Janeiro, Brazil (S22 27, W42 43) 24+3 Almanac:
Bangkok, Thailand (N13 49, E100 28) Original Almanac:
Bangkok, Thailand (N13 49, E100 28) 24+3 Almanac:
Perth, Australia (S31 49, E116 10) Original Almanac:
Perth, Australia (S31 49, E116 10) 24+3 Almanac:
A Quick Note about Solar Activityand GNSS/GPS
I’ve read media reports and I’ve been asked about a solar event that occurred last week (Thursday, February 12) and what possible effect it had on GPS operations.
I consulted with Joe Kunches of the NOAA Space Weather Prediction Center to understand how significant of an event it was.
“There was some activity but I would not think it would have an impact on GPS,” stated Kunches.
I asked him at what point would GPS operations be affected.
“As for flares (Radio Blackouts on the NOAA Scales), I’d say 10 to 20 times stronger than last week (R3 to R4 and above) would be sufficient to affect GPS on the dayside, but not for long,” said Kunches.
So, although there were media reports about the solar event last Thursday, if you had trouble with your GPS it wasn’t due to solar activity.
However, solar activity is a serious issue for GPS users, especially those using high-performance L1 receivers (sub-meter). You can be sure that I’ll will be covering this subject in-depth as we move further into the current solar cycle.
If you haven’t seen the announcement regarding my Webinar this Thursday (February18, 10 a.m. Pacific Time, 1800 hrs GMT), you might be interested. The title is “GPS for GIS – 101.” It’s a beginner’s (and refresher’s) guide to using GPS for GIS data collection. I’ve invited Craig Greenwald as Guest Commentator.
With apologies to James Bond, Ian Fleming, and, well, just about everybody else. Here is a grab from my mail bag. The message was subject-lined: GPS Spy Applications.
“I recently suspected my wife of cheating, having been involved with gps as a land surveyor since 1995, I used and application called mobile-spy.
“In order to install the application onto an iPhone you have to “jailbreak” the phone. Once its installed it will forward all text, url’s, and a gps location every 30 minutes if it has satellite availability. To make a long story short, I caught my wife in a pretty precarious spot, or spots. It’s my opinion that she was sneaking out and meeting someone at various spots on our normal routes, little hidden offroad trails if you know what I mean. Well I tested and retested the phones gps and the data from the mobile-spy website where I purchased the software, which is actually sold under the name “retina-x” and they make there money by giving you access to these logs through mobile-spy.com.
“However, my wife contests that all this data is wrong, of course, and she’s never been anywhere near these places. On the other hand, I have a ton of evidence saying she WAS at these locations. She says she’s read an article on AT&T that shows evidence that the gps in the iPhone is faulty and gives out bogus locations. As I said, I tested this a couple of times and it seemed to work perfectly.
“In good faith we’ve agreed to let me take the iPhone and perform more in depth tracking over a span of a few weeks. I am not really a writer but I’ll definitely keep detailed logs of my observations. Have you guys already had this particular issue come up before? If so, I’d love to know anything you can tell me because the way it stands I am getting a divorce unless this application can be proven wrong! My email is [email protected]
Cell phone is XXX.XXX-XXXX, I don’t check voicemails, so if I don’t answer just send me a text with your name and number. I look forward to hearing from you soon.”
Sleep was what I wanted, you know what I got. Wide awake, staying up late, wishing I was not.
Call it Madden withdrawal. It’s bad enough that I just endured Super Bowl XLIV without the smooth and engaging color commentary of the iconic John Madden, the legendary Hall of Fame, Super Bowl XI winning coach and virtual football entrepreneur. This year I patently missed John’s pithy commentary and the distinctive timbre of his voice. Coach Madden’s broadcast career has continued for more than thirty years and his instantly recognizable voice always invokes the desire to watch a football game. I would watch any game he color-commentated even if I did not particularly care about the competitors. It just wasn’t the same Super Bowl this year without John Madden, but somehow I soldiered on.
Col. David Madden.
The other Madden I’m going to miss and so will many of you, even if you don’t know it yet, is Colonel David Madden (USAF). Dave serves as the GPS Wing Commander at SMC (Space & Missile Systems Center) in Los Angeles, California, and will be stepping down as early as May, and hanging up his U.S. Air Force uniform at the same time. Dave has been the voice of GPS for many of us since he became the GPS Vice Wing Commander in July 2006. He became the commander in June of 2007, but he made his presence known the minute he landed at SMC. Dave has been a hard charger for the last 30 years and has numerous accomplishments of which he can be justly proud, but Dave hit his stride when he arrived at the GPS Wing. He was the right leader in the right place at the right time. Dave was immediately credible in the GPS world because of his previous forays in the classified and unclassified space arena.
Colonel Madden, the consummate military professional, who once described himself as a dangerous entity because he thought outside the box known as the military establishment, displays the immediately recognizable confidence of a leader who knows his job and emphatically embraces his mission; yet he is not overly arrogant and is always willing to listen. Sometimes he even deigns to speak honestly and openly to journalists. Dave has been the undisputed leader of the GPS Wing at a time when leadership was sorely needed. He used his engineering, systems management, and leadership expertise to create a cohesive team at the GPS Wing that simply and consistently gets the job done. His GPS accomplishments are many, but his greatest may be that he put the GPS back on the path as the PNT (Position, Navigation and Timing) and GNSS (Global Navigation Satellite System) gold standard for the world. He knows how to listen and take advice, and he knows when to stop debating, discussing, and dare I say arguing, and make the hard decisions. He and his finely honed force at SMC work tirelessly and intelligently to grow the GPS constellation in size and accuracy, but most importantly he is relentless in his support of the warfighter during a time of war.
Colonel Madden is a true patriot and fortunately he is not going far; rumor has it he will soon be an SES (Senior Executive Service) government civilian in yet another important space sector at SMC. Dave will be sorely missed by those of us that have had the honor to work closely with him in the GPS global arena for the past four years. Best of luck, Dave.
Col. Bernard J. Gruber.
Of course we also give a hearty welcome to Colonel Bernard J. (Bernie) Gruber, the new GPS Wing Commander or SPO (Special Program Office) director, as there is apparently a name and responsibility change or regression under way at SMC for various Wing-level organizations. Colonel Gruber served previously at SMC in the former GPS SPO in the user equipment office, the foreign military sales office, and as the program manager for Advanced Military Devices. So while he is not new to the space business or to GPS, he does have some large shoes to fill and we wish him well. If Bernie is half as smart as we know he is, he will be having some long and candid conversations with Mr. Madden, and I don’t mean the football legend.
Updates
There is so much happening in the PNT world that I could write a book. I promise not to do that, but an in-depth column is appropriate and you will see that in the near future. For now, allow me to quickly update the status of several ongoing programs and recent events.
24+3
We scooped the world at GPS World on 24+3 and fortunately everything is on schedule and working as planned. Two of the satellites are currently in their long transfer orbits and SVN 26 should start to move this week. Both SVN 24 and SVN 26 are Block-IIA satellites and are consequently a bit long in the tooth; 11 of the original 19 IIAs launched between 1990-1997 remain on orbit. These geriatric satellites are presently operating on different types of atomic clocks but their overall timing accuracy is not diminished, still averaging 1x10E-14. SVN 24 is currently utilizing a Caesium (also written Cesium) atomic clock and SVN 26 is utilizing a Rubidium atomic clock. This is a good mix for the plus three satellites as Caesium is nominally better over the long term for time stability and Rubidium is stable over a shorter period of time without periodic updates.
See Eric Gakstatter’s recent articles in GPS World for more technical information on the new locations for the three GPS satellites that are, or about to be, on the move.
GPS IIF. Photo: IIF
IIF
I received a plethora of mail recently either asking or raging about the status of the Boeing IIF, next generation of GPS satellites. I won’t even attempt to recount all the schedules and budgets this critical program has busted. The important point is, according to the latest schedule, sometime this month, hopefully in the next 10 days, IIF-SV1 will arrive at Cape Canaveral in Florida where it will subsequently be integrated with the Delta IV EELV or Evolved Expendable Launch Vehicle. This will be the first EELV to launch a GPS satellite; therefore, the integration and testing times, both on the ground and on orbit, are expected to be considerably more extensive than normal. Plus there are some unique features of the Delta IV that bear watching. The first stage of a Delta IV consists of one or, in the heavy variety, three Common Booster Core(s) (CBC) powered by a Rocketdyne RS-68 engine. Unlike most first-stage legacy rocket engines, which use solid fuel or kerosene, the RS-68 engines burn liquid hydrogen and liquid oxygen. The RS-68 is the first large, liquid-fueled rocket engine designed in the U.S. since the Space Shuttle Main Engine (SSME) in the 1970s, and at more than 63 meters or 206.7 feet in length, the Delta IV (at right) is the tallest rocket in active use.
When you see images of the first GPS IIF launch, the perspective will be a bit different from the venerable Delta II GPS launches of the past.
AEP 5.5C Update
The GPS Wing and 2SOPS (2nd Space Operations Squadron) initiated a software update (see my column in last month’s GPS World) of the ground command and control (C2) system for GPS on January 11, 2010, over a month ago as you read this. To put it mildly, the update did not go as smoothly as planned. There were immediate problems with certain military, commercial, and civilian receivers, plus some other system glitches appeared that are reportedly unrelated. To ensure there aren’t any more unknown receiver problems lurking in the shadows, the GPS Wing issued a unique NANU (Notice Advisory to NAVSTAR Users) through the NAVCEN (U.S. Coast Guard Navigation Center) for civilian and commercial GPS users, and through the GPSOC (GPS Operations Center) for military users, asking for user comments. The GPS is so ubiquitous, and there are so many global receiver manufacturers with so many different GPS receivers on the market today that, not surprisingly, the GPS Wing has been unable to keep track. It is a Herculean task and therefore instead of checking and certifying every GPS receiver manufactured, the GPS Wing issued an updateable ICD or Interface Control Document that all receiver manufacturers use as a voluntary guide to determine compliance. However, even the ICD leaves room for interpretation and is more ambiguous than the GPS Wing intended, so it should come as no surprise that there were and are still receiver issues following the latest AEP update. The GPS Wing is currently receiving more help than they think they need, but this too shall pass; it will just take time. The GPS Wing did not revert to AEP 5.4 (the previous version) because of the upcoming IIF-SV1 launch. The scheduled sequential AEP 5.5C and AEP 5.5D updates are required before the ground control segment can adequately control the more advanced capabilities of the IIF satellites.
The actionable aspect of this update and NANU is that if you are experiencing any problems or glitches with your GPS receiver that occurred after the January 11 update, then you should notify the 2SOPS if it is a military receiver and the NAVCEN if it is a civilian or commercial receiver. The original deadline was January 29, 2010, but I have it on good authority that reports are still being received. So, if you have a GPS receiver issue, please report it.
For civil and commercial users, the U.S. Coast Guard Navigation Center’s address is:
NAVCEN MS7310
7323 Telegraph Road
Alexandria, VA 20598-7310
You can contact NAVCEN by telephone at (703) 313-5900 or go to its comprehensive website.
GPS Civil Focus Day
On February 3 the Commander of HQ Air Force Space Command, General C. Robert Kehler, hosted the 2nd GPS Civil Focus Day. This event was long overdue; the last one occurred more than five years ago. It was one of the best updates I have attended that was specifically crafted for the civilian community. My hat is off to Colonel Dave Buckman and crew for all their hard work that made this event such a success. There were numerous government VIPs present, and it would take several columns to review their input, but suffice it to say the briefings and discussions were candid, informative, and unfortunately not for attribution. Therefore, before I can reveal more I need to be granted permission and that is in the works. Meanwhile we will post the cleared GPS Civil Focus Day briefings on the GPS World website, so watch the GPS World daily news for the location. The important point is that this high-level meeting of the minds underscored that GPS, the global PNT gold standard, is and always has been a dual-use system, and the USAF on behalf of the U.S. government is working hard to meet everyone’s global PNT needs.
Mobile Epiphany and Touch Inspect
To wrap up the column this month, I want to say thanks to everyone who has written me concerning the Touch Inspect software application from Mobile Epiphany I mentioned in my December 2009 GPS World column. The response from the military, civil, and commercial communities has been simply overwhelming, and therefore I am planning an in-depth review of this versatile application in a future issue. I have not historically, as a rule, reviewed software to the same degree that I have hardware, but in this case I am impressed with the application, especially the superb integration of GPS capabilities and the user interface. So a review is in order. Watch this space.
Until next time happy navigating and keep those cards, letters, and e-mails coming.
In the few years I’ve been writing this column, very few subjects have warranted back-to-back newsletter coverage. The new GPS 24+3 onfiguration is one of them. The reason I’ve continued with this discussion is because it will significantly affect your GPS operations, especially if you’re using RTK or DGPS.
What is the new 24+3 GPS configuration?
If you didn’t read my last column, you might want to read it so you have a common frame of reference. Essentially, the effect of the 24+3 configuration will be to increase the visibility of more GPS satellites throughout the day at a given location. In addition to have more satellites in view, you will generally see lower PDOP values which can result in an increase in accuracy; but certainly the increased satellite visibility is the major upside with 24+3.
Remember that the GPS satellites are configured in 6 orbital planes (A, B, C, D, E, F) with X number of satellites in each plane that are referred to as “slots.” For example, slot A1 is the first satellite in the A plane, slot B4 is the fourth satellite in the B plane. Note that the slots aren’t necessarily in numerical order. Following is a graphic presented by the U.S. Air Force in September 2009 to provide an illustration of the planes, and slots within each plane. GLAN is the Geographic Longitude of the Ascending Node.
On the graphic above, note that many of the satellites are paired together. When GPS satellites are paired together, there is little benefit to the user on the ground because the satellites aren’t “spread out”. Ideally, the user on the ground needs the satellites to be “spread out” in the sky which will result in a lower PDOP value (better constellation geometry) and ultimately better accuracy. The satellites are in this configuration today because GPS policy defines a 21+3 configuration. Since there are 30 operational GPS satellites in orbit (six more than required), the six spares are placed near other operational satellites. This isn’t optimal for the user on the ground.
The concept behind the 24+3 configuration is to spread out the satellites more than the current configuration to benefit users on the ground. This involves significantly repositioning three GPS satellites (SVN24, SVN26, SVN49) and slightly repositioning three other GPS satellites (SVN56, SVN46, SVN55).
Following is a tabular listing of each slot in the 21+3 configuration. Please note that the graphic above is a rough graphic for illustration purposes (referencing GLAN) while the tabular data below are the actual values.
Notes:
Epoch: 00:00:00 UTC, 1 July 1993 Greenwich Hour Angle: 18h 36m 14.4s Orbital Slot IDs are Arbitrarily Numbered * Orbital Slots Marked by an Asterisk are Expandable
In the 24+3 configuration, slots B1, D2, F2 are split to B1F/B1A, D2F/D2A, and F2F/F2A. The F designation is Fore and the A designation is Aft.
Following is the tabular data for the expanded slots:
On the B plane, SVN49 is repositioning to slot B1F while SVN56 is moving slightly to slot B1A.
On the D plane, SVN24 is repositioning to slot D2F while SVN46 is moving slightly to slot D2A.
On the F plane, SVN26 is repostioning to slot F2F while SVN55 is moving slightly to slot F2A.
You can refer to the graphic at the beginning of this article to reference the current location (approximate) of each SVN as well as the slot id. The SVN number is to the left of the symbol while the slot id is to the right.
SVN24 has the furthest distance to travel. It began its journey late last month and will arrive in January 2011. SVN49 and SVN26 will both arrive at their destination slots in May 2010.
If they were in a hurry, the satellite travel time could be reduced, but according to folks I’ve spoken to they have to conserve fuel. After the satellite reaches its destination slot, it must have enough fuel to occasionally maneuver as well as retain enough fuel for an end of life boost which could happen many years in the future.
Exactly how many more GPS satellite will my receiver “see”?
I was hoping to publish satellite visibility charts in this column for different regions of the world to illustrate the upside of 24+3. This is where the “rubber meets the road.” I’ve been experimenting with a modified GPS almanac in satellite visibility software to generate these, but I want to confirm the accuracy of the plots before I publish them. I’m close, but not quite there yet.
Also, I want to publish a separate satellite visibility chart for DGPS users. Remember from my last column that SVN49 is a tricky one. It’s still unhealthy since it was launched into orbit last March. Most likely, it will never be usable by SBAS (WAAS, EGNOS, MSAS) and DGPS receivers and will effectively reduce the 24+3 configuration to a 24+2 configuration for those users. Mind you, even if SVN49 is not usable by SBAS and DGPS, the new configuration will still be an improvement over the current configuration.
Look for continuing coverage on the 24+3 configuration. It will be the most relevant GPS topic for day-to-day GPS users in 2010.
Deterministic risk modeling, the basis of the Efficient Market Hypothesis (EMH) at the core of modern quantitative finance, is known to be fundamentally flawed, but its elegance and convenience has blinded researchers to growing evidence of its weaknesses. The near-complete acceptance of the EMH led to models that dramatically accentuate its flaws, which in turn led to absurd but eagerly accepted conclusions for loan-default risk. These models proved dramatically vulnerable to changes in the housing market in 2007–2008 and led directly to the ensuing crash.
The gross inattention to potential anomalies and violations of nominal behavior that characterize quantitative finance fortunately do not apply to satellite navigation integrity assurance. Similar techniques and probability distributions are used, but understanding what can go wrong leads to detailed emphasis on modeling and mitigating rare events. Where significant uncertainty exists, conservative assumptions try to be robust to it. Thus, certification of satellite- and ground-based augmentation systems (SBAS and GBAS) likely demonstrates that these systems meet their integrity risk requirements with substantial margin.
Despite this, the predominant use of deterministic models for risk assessment is dangerous because it purports to provide guaranteed bounds on uncertainty that do not apply in practice. The conservative nature of satellite navigation risk assessment greatly reduces but cannot eliminate the underlying integrity risk, while it leads to performance losses with potentially unmeasured safety impacts. Given the uncertainty that is present, probabilistic models are much better suited to providing “illusion-free” risk assessments that enable realistic system-level design trade-offs.
Economics. Decades of financial theory are based upon the assumption that the normal (Gaussian) distribution applies to financial markets. In spite of common-sense arguments to the contrary, assuming that it does is too convenient to give up, and the theories it gives rise to are so useful that it was thought better to force-fit the model to financial processes. Academic and professional preference for tractable, analytical, easy-to-use models trumped the search for truth.
The simplification of correlation into a single parameter made it easier to fit historical data on mortgage default risk correlation to a tractable model. Despite this, the relative rarity of defaults prior to 2000 made any correlation model based on historical default data highly uncertain. An EMH-based market-driven model for default risk correlation became instantly popular, enabling the creation of complicated mortgage-backed derivatives without in-depth analysis.
The simplicity of the Value-at-Risk output that encouraged its widespread use in corporte risk assessment allowed managers to forget that it was only useful to, at most, the 99th percentile. It quickly became thought of as an actual worst-case bound on losses and treated as such in portfolio optimization. Loss reserves throughout the economy fell far short of what was needed. In retrospect, such approaches that oversimplify risk to the point where managers think they fully understand it are worse than useless, as they are so likely to be abused. Experts should understand risk in all its complexity and communicate that risk to decision-makers as fully as possible.
Mathematics. This financial experience suggests that, as Albert Einstein said, “As long as the laws of mathematics refer to reality, they are not certain; and as far as they are certain, they do not refer to reality.”
Deterministic models provide precise quantification of uncertainty whose accuracy and precision are illusory because they depend wholly on the assumptions used to generate the results. Probabilistic models also produce imprecise outputs, but the imprecision is real, and the goal of these models is to identify this lack of precision, rather than cover it up.
Because the probabilistic approach is so philosophically different from the deterministic one, it is likely that more traditional deterministic risk models will remain dominant. These require multiple assumptions regarding uncertain behavior and simplifications to make the resulting model tractable and useful for analysis. Danger lies in forgetting how these models were created and growing to believe in them too strongly while ignoring all contrary data, as happened with the EMH.
To avoid this, assumptions and simplifications on which deterministic risk models are based should be highlighted not only during the modeling process but also when results are presented. If these shaky foundations are consistently emphasized, fewer people will be tempted to willfully or accidentally misinterpret the results, and researchers will be less likely to extrapolate from one flawed model to another.
Lessons for SatNav Integrity
We must first recognize that integrity or safety assurance for satellite navigation is a unique application of risk assessment in which the aim is to protect passengers from the consequences of very rare but potentially hazardous threats. As in the financial world, the Gaussian probability distribution is used extensively to model nominal error behavior and to compute position-domain protection levels intended to bound worst-case user position errors at the integrity-risk probabilities required for user safety. The Gaussian model is a convenient, efficient means to communicate ground-system errors to SBAS and GBAS users in a single parameter: the standard deviation (or sigma) of range-domain errors.
Great care is taken in using the tails of the Gaussian assumption to bound rare-event errors under nominal conditions (so-called rare-normal errors). Extensive studies of GPS, SBAS, and GBAS data show that, while the Gaussian distribution approximately holds in many cases and is usually a good model within the 99th percentile of errors, it is not a good description of rare-event behavior. In particular, rare-event tails of actual data often considerably exceed what is predicted by the Gaussian distribution. Several reasons exist, but the dominant one is the phenomenon of mixing of errors with different underlying actual distributions. This makes sense: rare-normal errors are not really normal but are instead combinations of off-nominal conditions that have different causes.
Because use of the Gaussian distribution is built into the SBAS and GBAS standards, the primary defense against its inapplicability at low probabilities is to inflate the sigmas broadcast by SBAS or GBAS (or assumed in user equipment) such that the assumed distribution overbounds the actual, unknown (and likely very complex) error distribution at the probabilities that matter for user safety. This is a difficult problem. No matter what approach to deriving bounding inflation factors from collected data is used, no means of proving rare-event error bounding by Gaussian distributions exists or can exist, given that the required assumptions cannot be proven. Despite this, conservatism and common sense in deriving inflation factors (and then applying additional margin for “unknown unknowns”) should sufficiently cover the underlying uncertainty.
Even after inflation has been applied, reliance on Gaussian error models becomes much more critical when they are extrapolated to derive distributions for squares of errors, as is done in receiver autonomous integrity monitoring (RAIM) and in real-time monitoring of the broadcast sigma parameters. Errors in the Gaussian error model are greatly magnified when squared and then assumed to follow a chi-square distribution.
History. Using GPS performance to build models of failure probabilities and anomaly behaviors suffers from a lack of data since GPS was not fully commissioned until 1995. Estimating the prior probability of sudden, unpredictable failures in GPS satellites is mostly based upon the observed failure history of GPS satellites in orbit — but such failures are quite rare and are not consistent across all satellites. They occur more frequently as satellites approach end-of-life, and they change as different satellite blocks deploy over time. There is no guarantee that future satellite or Operational Control Segment performance will correspond to that observed in the past. It is risky to estimate one failure rate across all satellites.
For SBAS and GBAS, conservatism and common sense must again be applied to limit the impact of these uncertainties. Failure-rate estimates are made from data where different satellites are combined, but significant margin is applied to account for differences among satellites. The resulting prior probabilities for failures are conservative for all fault types and extremely conservative for faults where limited or no data exists. The problems of relying on limited historical data are even more severe when threat models are created to represent possible system behaviors when a particular fault or anomaly (for example, satellite signal deformation, ionospheric storms) occurs. In the case of satellite signal deformation, deterministic threat models have been extrapolated from a single observed event, the fault on SVN19 discovered in 1993.
Errors and Failures. The problem of modeling uncertain and potentially time-changing correlations breaks down into error correlation and anomaly correlation. Correlation among nominal errors is relatively easy to deal with because significant data exists; one does not have to wait for anomalous conditions. However, even when truly uncorrelated data is present, the statistical noise inherent in correlation coefficients estimated from data is almost always non-zero. Since the designer cannot tell whether real correlation exists or not, the resulting error sigmas must conservatively allow for significant non-zero correlations.
In GBAS, ground-system reference-receiver antennas are sited far enough apart (100–200 meters) that diffuse multipath (and most specular multipath) should be statistically independent from receiver to receiver. However, this cannot be guaranteed, and even if it is true at a given site, statistical correlation estimates will be non-zero. Therefore, the assumption that nominal error sigmas in the resulting pseudo-range corrections are reduced by a factor of two when averaging measurements across four reference receivers is not strictly valid. Conservative handling of the estimated correlation at a given site can properly de-weight the assumed credit given for averaging, or the designer can choose to take no averaging credit at all.
On the other hand, modeling correlations among rare-event anomalies is very difficult. GNSS satellite failure correlations are hard to foresee because of our limited understanding of their causes. The temptation to ignore correlations and to treat all failures as statistically independent is very high, as this allows the use of simplified probability models and produces probabilities of multiple failures that are usually small enough to be ignored.
This dangerous trap can lead to neglecting important sources of integrity risk. Avoiding it requires assuming some non-zero degree of failure correlation, but without detailed failure cause-and-effect information, it is very difficult to know how much correlation is sufficiently conservative in a deterministic risk model. Here, probabilistic models are far superior, as our degree of uncertainty regarding actual failure correlations can be handled directly by representing different correlation scenarios, or possible states of reality, and assigning probability weights (themselves random variables) to each.
Worst Case. Since the uncertainty inherent in the development of deterministic failure models is well understood, the resulting threat models are usually applied in terms of the worst-case fault within the bounds of the threat model. Once one agrees to ignore the possibility of faults exceeding the threat-model bounds, this worst-case-fault assumption is the most conservative one possible. The worst-case fault is judged from the user’s point of view rather than that of the GNSS or service provider. For example, the worst-case C/A-code signal-deformation on a GPS satellite depends upon the design of the reference receiver providing differential corrections (if any) and the design of the user receiver. SBAS and GBAS users are allowed a pre-specified receiver design space. Given the reference receiver chosen by a given SBAS or GBAS installation, finding the worst-case signal-deformation fault requires error maximization over all possible deformations in the threat model and all possible user receiver design parameters.
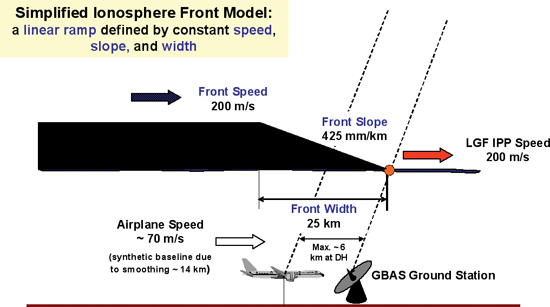
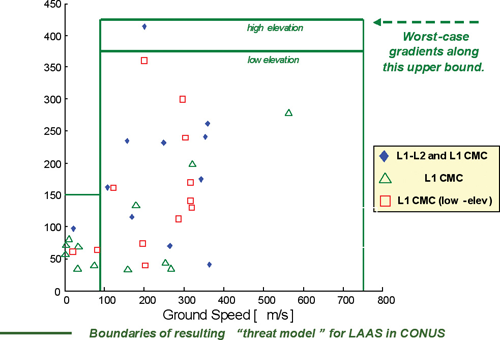
Another class of anomalies, large ionospheric spatial gradients, can be used to illustrate this procedure. Figure 1 shows a simplified, linear model of a large, wedge-shaped ionospheric spatial gradient affecting a GBAS installation, and Figure 2 shows a graphical summary of the parameter bounds of the associated threat model developed for the FAA LAAS based on CONUS data. The geometry assumed in Figure 1 is a simplification of reality and cannot be assumed to hold precisely, even though the threat model assumes that it does. Fortunately, the resulting risk assessment is not very sensitive to small deviations from a perfectly linear front slope. This kind of sensitivity analysis is required to test our vulnerability to violations of deterministic models whose underlying assumptions cannot be verified.
FIGURE 1. Geometry of GBAS (LAAS) ionospheric threat model
The parameter bounds in Figure 2 cover the worst validated ionospheric gradients observed since 1999. They cannot be guaranteed to cover future anomalies; thus, ongoing monitoring of ionospheric anomalies is required to see if these bounds need updating in the future. However, the outer bounds of the existing threat model appear to be very conservative because they are driven by a single ionospheric storm on a single day (20 November 2003) in a small region (northern Ohio). This storm appears much worse than the other observations shown in Figure 2. The vast majority of anomalous gradients discovered, most of which are not shown in Figure 2, have slopes under 200 millimeters/kilometer (mm/km) and are generally not threatening to GBAS users.
FIGURE 2. Parameter bounds on GBAS (LAAS) ionospheric threat model for continental United States (CONUS
Therefore, in a probabilistic model, the vast majority of the weighting (given that an anomaly condition exists) would go toward non-threatening gradients with tolerable slopes, a small fraction would go to the 200–300 mm/km slope range, a much smaller fraction to the 300–425 mm/km range, and then a very small but non-zero fraction to gradients above 425 mm/km (the upper bound in Figure 2) that have not been observed to date but cannot be ruled out.
Given this uncertainty within a deterministic model, the worst-case gradient of 425 mm/km (for high-elevation satellites) is assumed to be present at all times, and its hypothetical presence is simulated, with the worst possible approach geometry and timing relative to a single approaching aircraft, on all pairs of satellites otherwise approved by a LAAS ground facility (LGF). The largest resulting vertical position error over all potential user satellite geometries represents the maximum ionospheric error in vertical position (MIEV) that must be protected against. Before mitigation by LGF geometry screening, this worst-case error can be as large as 40–45 meters.
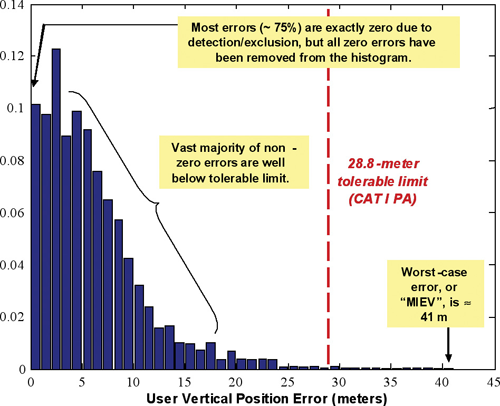
Figure 3 illustrates the potential magnitude of vertical errors under near-worst-cas
e ionospheric anomaly conditions based on a limited probabilistic model that varies front slope (above 350 mm/km), speed, satellites impacted, and approach direction relative to that of the aircraft for a user approaching the LAAS facility at Memphis International Airport with the SPS-standard 24-satellite GPS constellation (only subset geometries with two or fewer satellites removed are considered). The worst-case position error, or MIEV, prior to LGF geometry screening is about 41 meters, but the relative likelihood of this result is very low. Much more common are errors in the 5–15 meter range. This figure does not show the majority of cases where the LGF detects the anomaly before any error occurs. LGF geometry screening acts to remove potential subset geometries (make them unavailable by inflating the broadcast parameters) whose worst-case error exceeds 28.8 meters, but the price of this is substantially lower availability for CAT I precision approaches.
FIGURE 3. Near-worst-case ionosphere-induced vertical position errors at Memphis
Figure 3 shows the extreme level of conservatism that typically results from deterministic worst-case threat model impact analysis. This level of conservatism is so great that it is hard to imagine that the actual user integrity risk is somehow worse than what is modeled in this manner. However, “hard to imagine” does not equate to “is guaranteed not to happen.” The goal of worst-case analysis is to eliminate uncertainty (by assuming the worst possible outcome of the uncertain variables) and thus prove that a given probabilistic integrity risk requirement is met. However, the limited knowledge upon which threat models are based means that such proof is illusory at best and dangerously misleading at worst. Meanwhile, a great deal of performance (in terms of user availability and continuity) is sacrificed. As shown by the example in Figure 3, probabilistic analysis makes it possible to trade off risk reduction and performance benefit in a coordinated manner. The illusion of guaranteed bounds on risk is abandoned, but as the financial crisis illustrates, it is just that — an illusion.
SAM PULLEN is a senior research engineer at Stanford University, where he is the director of the Local Area Augmentation System (LAAS) research effort. He has a Ph.D. from Stanford in aeronautics and astronautics. This article passes quickly over economic details included in his ION-GNSS 2009 paper, “Providing Integrity for Satellite Navigation: Leassons Learned (thus far) from the Financial Collapse.”
The news arrived after this issue had gone to press, so I pulled back this column to write about it. By early February, it will be oldish news, and further details will have appeared on our website.
The crux: another pitfall for the GPS constellation.
The system’s command and control operational software update uploaded in late 2009 has started wreaking some havoc with installed military receivers across many fielded platforms, as well as with some civil receivers. Whether major or minor havoc, I don’t pretend to know yet. The concept of selective availability anti-spoofing module (SAASM) figures in it, though now I’m toeing classified turf.
Whatever the control features may be, they are designed to work with authorized military receivers that have successfully passed security tests prior to fielding. But actual live introduction of the new software has produced different results than those seen in testing: some receivers in question are intermittently not tracking Y-code.
Corrective action could encompass either the Air Force rolling back the update or revising its software, or manufacturers modifying software within the receivers — thousands or perhaps tens, hundreds of thousands already in the field.
The conscientious, hardworking engineers at the GPS Wing had barely recovered from the SVN49 debacle, or perhaps not even, as a work-around has yet to surface. Now this.
In the category of small comfort, they are not alone. Recently manufactured GLONASS satellites have significant signal-generation problems. A new Compass satellite on orbit may no longer be controllable. And while Galileo inches forward, European political and industrial bickering perseveres. Ah, the bickering . . . .
Despite these distractions in the sky and elsewhere, we should all keep our heads down, noses to the grindstone, fingers to the keyboard — and eyes on the prize. A radio-frequency signal in space, like Heinlein’s moon, is a harsh mistress. Very exacting, very demanding. Occasionally punishing. Ultimately rewarding.
This Just In. By the time you read these words, the Loran signal may be dead and gone from U.S. territories. Thanks to the Coast Guard Commandant, the Secretary of Homeland Security, and those in the administration — perhaps the president himself — who know or care nothing about secure PNT, and who braggadaciously proclaim, “Back-up? We don’t need no steenkeen back-up!”
Meanwhile the Air Force Chief of Staff has started saying it is critical for the military to “reduce its dependence on GPS-aided precision navigation and timing” because of its vulnerability, and supporting officers confirm that GPS has been jammed or interfered with recently.
Do these people talk to one another? Surely they must.
The PNT Key. More robustness will always be a good thing. Once I have two coded signals on widely spread frequencies, I’m well on my way there. This is not just within the narrow band allocated to GNSS, but across many radio frequencies, many technologies.
Last week, the U.S. Air Force announced it is reconfiguring the GPS constellation. The Air Force is changing the constellation from a 21+3 configuration to a 24+3 configuration. The result will be more satellites in view, on average.
This is great news for the GPS surveying and GIS mapping user. In my opinion, it was the only achievable short/medium-term solution to the GPS “brownout” problem that has plagued GPS surveying and mapping users for years, and has worsened in recent months.
In short, a GPS “brownout” is a time of the day when a GPS user is unable to utilize his or her GPS receiver because there aren’t enough satellites in view to achieve the desired accuracy. GPS “brownouts” primarily affect high-precision RTK users because that technology requires that the GPS receiver is tracking at least six satellites for a reliable position. With the current GPS constellation, there are times during the day when this is not possible given the satellite configuration and local conditions (obstructions such as trees, buildings, and terrain). This problem puts a serious damper on GPS productivity.
Even though there are currently 30 operational GPS satellites, they are configured in a 24-satellite constellation. Essentially, several satellites are “paired up” so they add no value to users on the ground. They are designated as back-up satellites in case of a failure. I wrote a detailed article on this subject in October 2009 titled GPS Constellation Management: Playing Not to Lose that summarizes the problem.
The New 24+3 Configuration
Announcements from various publications and online newsgroups have different interpretations of the Air Force announcement. Some are emphasizing increased accuracy and others are citing increased coverage in Afghanistan. While both are correct, the major benefit to the surveying/mapping user community is increased worldwide satellite visibility. In other words, more GPS satellites will be in view at a given time during the day.
More satellites in view = greater RTK and mapping productivity.
The reason that increased accuracy is mentioned in the announcement is because PDOP values will be lower in general due to the increase of satellites in view…and there’s a direct correlation between accuracy and PDOP. Just how many more satellites will be in view is not clear yet. I’m working on producing some mission planning charts that will illustrate the benefits of 24+3 compared to 21+3.
The three satellites being repositioned are SVN24, SVN26, and SVN49. SVN24 and SVN26 are two of the oldest satellites (Block-IIA) in the GPS constellation. SVN24 was declared operational in August 1991. SVN26 was declared operational in July 1992. SVN49 is a newer Block II-RM that was launched last March and has never been declared operational due to an anomaly discussed here before. More on SVN49 further down.
The time to reposition each satellite is significant. SVN24, with the furthest distance to travel, began its journey last week and will take 12 months to reach its destination slot according to the Air Force. SVN49 will begin its journey on January 21, 2010, and will take four months (May 2010). SVN26 will begin its transition on February 8, 2010, and will reach its destination slot in approximately three months (May 2010), according the Air Force.
Which Users Will Benefit the Most?
After (and maybe during) the transition, RTK users will see an increase in the number of visible GPS satellites throughout the day. As I mentioned above, I’m still working on producing satellite visibility charts to better and more accurately illustrate this, so stay tuned. Of course, the benefit is going to vary depending on where you are located.
Another group who will benefit is GIS mapping users, especially those working in difficult GPS conditions such as in forestry, urban/municipal areas, and areas where there is rugged terrain. An increased number of GPS satellites in view will allow GIS mapping users to operate in areas where it may not have been possible before and perform better in areas that were difficult.
Consumer GPS users will benefit the least. Even during times of GPS “brownouts,” the pushback from consumer GPS has been minimal. Automobile navigation systems perform without a hiccup for the most part and handheld receivers behave reasonably well. The primary reason is that both of those types of receivers aren’t selective about the satellite signals they accept. Accuracy is way down the list of important design features in those receivers. That’s not the case with RTK and professional GIS mapping receivers. RTK and GIS mapping receivers require high-quality measurement data from GPS satellites.
Will RTK Users Still Need GLONASS?
Certainly, GPS-only (non-GLONASS) RTK users will see an increased benefit with the 24+3 configuration, particularly those who are operating in relatively clear-sky environments like precision agriculture. However, as we’ve seen with this technology, users will keep pushing the GNSS envelope to use it in marginal conditions where GPS 24+3 won’t be enough. GLONASS will still contribute more satellite measurements, on average, than GPS 24+3. Therefore, GLONASS will still be a desirable feature.
But, I think we may see mainstream GNSS receiver manufacturers selling the GLONASS option at a lower price (or offering it for free) as it will be required in fewer instances. Russia is continuing to launch GLONASS satellites three at a time with the most recent launch being in December 2009 and the next scheduled one being later this spring.
SVN49 – What No One Is Talking About
One of the three GPS satellites being repositioned for 24+3 is SVN49. If you’ve kept up with the GPS constellation over the past six months, no doubt you’ve read about the SVN49 problem. It was launched last March and still hasn’t been declared healthy due to an irreparable problem. There has been much debate about what to do with SVN49. You can read about it here and here and here.
Most likely, the problem that SVN49 has will not affect RTK users. In other words, if SVN49 is set healthy, RTK users will be able to utilize it like the other normally operating GPS satellites.
However, GIS mapping users won’t benefit from SVN49. The Federal Aviation Administration (FAA) has said it won’t incorporate corrections for SVN49 in WAAS. Although the U.S. Coast Guard (USCG) and Department of Transportation (DOT) haven’t commented, I doubt they will broadcast DGPS corrections for SVN49 either. For code phase post-processing, I doubt manufacturers will modify their post-processing software to accommodate the SVN49 anomaly.
So, for GIS mapping users, it’s likely going to be a 24+2 configuration instead of a 24+3 configuration.
Either way, this is good news across the board for the GPS surveying and mapping user community.
I agree with what Don Jewell wrote in his column recently, that this subject is going to be written about and discussed a lot over the next few
months as SVN26 and SVN49 are repositioned, and over the next year as SVN24 reaches its destination.
I’ve intended to write about the 2008 Federal Radionavigation Plan (FRP) for quite some time. It is an important document because it is the official policy document that drives the United States’ radio navigation (including GPS) program planning. According to the FRP, it includes the introductions, policies, radionavigation system user requirements, system descriptions, and operating plans of various radionavigation systems. The FRP is updated biennially. The 2008 FRP was approved in January 2009.
The FRP preface states that it is prepared jointly by the Department of Defense, Department of Homeland Security, and Department of Transportation with assistance from other government agencies. The document covers radionavigation systems used by both the civilian and military communities. It does not cover radionavigation systems used exclusively by the U.S. military.
The FRP is a fascinating document because it encompasses GPS, GPS augmentation systems, and “back-up” systems. In this column, I’m going to extract several statements from the FRP and comment on them. If you’d like to read the FRP in full (184 pages), you can do so here. Briefly, the FRP includes the following navigation technologies: GPS, WAAS, DGPS, LORAN, and VOR/DME/TACAN/ILS/MLS/NDB (all aviation-oriented).
By way of background and according to the FRP, the first version of the FRP was released in 1980 as part of a Presidential Report to Congress.
For the remainder of this column, I’ll provide quotes from the FRP that I think are relevant and add some commentary.
From the executive summary:
“A major goal of DoD and DOT is to ensure that a mix of common-use (civil and military) systems is available to meet user requirements for accuracy, reliability, availability, continuity, integrity, coverage, operational utility, and cost; to provide adequate capability for future growth; and to eliminate unnecessary duplication of services. Selecting a future radionavigation systems mix is a complex task, since user requirements vary widely and change with time. While all users require services that are safe, readily available and easy to use, unique requirements exist for military as well as civil users. For example, the military has more stringent requirements including performance under intentional interference, operations in high-performance vehicles, worldwide coverage, and operational capability in severe environmental conditions. Similarly, civil users desire higher accuracy and integrity for future highway, rail, and other safety-of-life applications. Cost is always a major consideration that must be balanced with a needed operational capability.”
EG Comment: As I did, you may think the “civil user desires” described in the executive summary are a small subset of actual consumer users, and that’s true. But, it’s important to remember that this document is focused on U.S. government users rather than commercial users.
However, it does raise a point about the consideration given to civilian users when program decisions are being made regarding GPS such as features, satellite launch schedules, ground infrastructure, and constellation management. I’m sure when a congressperson, who is making decisions regarding budgets, is researching the subject he or she will read this executive summary. The statement “civil users desire higher accuracy…” will mislead the reader. While there is a demand for high accuracy in the commercial civil user community, there is a much larger demand for products in the low and medium accuracy commercial markets.
While I’m not criticizing the executive summary for being incorrect, it seems to me that the people who control the purse strings (Congress) may not be given enough information to grasp the “big picture” regarding the GPS user community.
“Interoperability considerations —
“National and international radionavigation systems are sometimes used in combination with each other or with other systems. These combined systems are often implemented to provide improved or complementary performance. In the case of GPS, the USG encourages future interoperability with foreign space-based PNT systems for civil, commercial, and scientific uses worldwide. Examples of existing or future foreign space-based PNT systems are Russia’s Global Navigation Satellite System (GLONASS), the European Union’s Galileo, Japan’s Quasi Zenith Satellite System (QZSS), China’s Compass, and India’s Regional Navigation Satellite System (RNSS). Properly designed receivers that take advantage of these systems may benefit from additional satellite signals, increased redundancy, and improved performance over that obtained from just one system alone. A critical aspect of system interoperability is ensuring compatibility among radionavigation services. For example, the USG has concerns about radionavigation signal structures that could adversely impact the military and civil use of GPS. The USG has also fostered the use of interoperable augmentations through its adherence to international standards for DGPS and space-based augmentation system services.These include Maritime DGPS and the Wide Area Augmentation System.”
EG Comment: I have to say that the U.S. government has done a good job in the area of interoperability. In the 2001 Federal Radionavigation Plan, interoperability wasn’t discussed nearly to the degree it is in the 2008 FRP.
From the 2001 FRP: “Radionavigation systems are sometimes used in combination with each other or with other systems. These combined systems are often implemented so that a major attribute of one system will offset a weakness of another.…a few manufacturers have of navigation and positioning equipment have developed combined GPS/GLONASS receivers to take advantage of these benefits. Some receivers are on the market with others in the planning stage.”
From 2001 to 2008, the U.S. government’s position has morphed from recognizing that some GPS/GLONASS receivers exist to actually encouraging interoperability with all “foreign-based PNT systems for commercial, civil, and scientific uses worldwide.” That’s quite a transformation.
“General policy statement —
“As the full civil potential of GPS services and its augmentations are implemented, the demand for services provided by other Federally provided radionavigation systems is expected to decrease. The USG will reduce non-GPS-based radionavigation services with the reduction in the demand for those services. However, it is a policy objective of the USG not to be critically dependent upon a single system for PNT. The USG will maintain back-up capabilities to meet: (1) growing national, homeland, and economic security requirements, (2) civil requirements, and (3) commercial and scientific demands. Operational, economic, safety, and security considerations will dictate the need for complementary PNT systems. While some operations may be conducted safely using a single radionavigation system, it is Federal policy to provide redundant radionavigation service where required. Backups to GPS for safety-of-life navigation applications, or other critical applications, can be other radionavigation systems, or operational procedures, or a combination of these systems and procedures to form a safe and effective backup. Backups to GPS for timing applications can be a highly accurate crystal oscillator or atomic clock.”
EG Comment: I wrote to someone the other day about this. Back-ups to GPS is a serious issue. I think very few would argue that it’s not. The reality is that
there is no single back-up for GPS. It depends on the application. In aviation, it’s maintaining a minimal infrastructure of VOR/DME/ILS rather than Loran, according to the FAA. In maritime, it’s the legacy visual aids and charts according to the U.S. Coast Guard. For high precision users, it’s legacy technology like optical instruments and new technology like Locata and pseudolites.
“GPS backup —
“With respect to transportation to include aviation, commercial maritime, rail, and highway, the DOT has determined that sufficient alternative navigation aids currently exist in the event of a loss of GPS-based services, and therefore Loran currently is not needed as a back-up navigation aid for transportation safety-of-life users. However, many transportation safety-of-life applications depend on commercial communication systems and DOT recognizes the importance of the Loran system as a backup to GPS for critical infrastructure applications requiring precise time and frequency.”
EG Comment: The continuing Loran saga.
“Civil Signals —
“In addition to the L1 Coarse/Acquisition (C/A) signal, the USG will add three additional coded signals to support future civil applications:
• L1C, frequency 1575.42 MHz, providing better performance than the current C/A signal being used by civilian receivers;
• L2C, frequency 1227.6 MHz; and
• L5, frequency 1176.45 MHz, to meet the needs of critical safety-of-life applications, such as civil aviation.
“The L1C signal is designed to be interoperable with the European Galileo system and is being promoted as a future world standard for incorporation into Global Navigation Satellite Systems (GNSS). The next generation of GPS satellites, GPS III, will begin broadcasting L1C around 2014.
“The performance specifications in the current SPS PS apply to users of the L1 C/A (1575.42 MHz) signal. As new modernized GPS civil signals (L1C, L2C, and L5) achieve initial operating capability (IOC), performance standards for services utilizing these signals will be developed.”
EG Comment: Nothing new here, but the schedule of actually implementing the new civil signals is a moving target. There are only seven satellites broadcasting L2C at this time. The first Block IIF satellite with L5 should launch in the first or second quarter of this year. Satellites broadcasting L1C (Block III) won’t launch until at least 2014 and a full constellation won’t be operational for many years after that.
“Discontinuation of codeless and semi-codeless GPS access —
“As published in the Federal Register on September 23, 2008 (Volume 73, Number 185), the USG commits to maintaining the existing GPS L1 C/A, L1 P(Y), L2C and L2 P(Y) signal characteristics that enable codeless and semi-codeless GPS access until at least 31 December 2020. To enable an orderly and systematic transition, users of semi-codeless and codeless receiving equipment are expected to transition to using civil-coded signals by this date.”
EG Comment: I’ve written a lot about this. You can read some here.
“Military signals —
“Currently, GPS military users are provided P(Y) code signals on L1 and L2. These will be supplanted in the future by the M-Code, the next generation military GPS signal. The first GPS Block IIR-M satellite began broadcasting M-Code in September 2006. M-Code will significantly improve exclusivity of access because, in addition to being encrypted, it will be spectrally separate from civilian signals and other radionavigation satellite service signals, thereby enabling U.S. navigation warfare operations through spectral separation. Navigation warfare involves protecting U.S. and allied use of GPS while simultaneously preventing hostile forces access to GPS services and preserving peaceful civil GPS use outside of an area of military operations. The M-Code will permit higher power operation than the present signal design and will facilitate localized tactical denial of GPS civil signals to prevent their use by hostile forces. Military GPS receivers, when tracking the encrypted military signals, are much more resistant to interference than commercial GPS equipment. The newest generation of military GPS receivers that can access military GPS signals directly are even more resistant to interference; however, future improvements in signal availability and receiver performance will continue to be necessary.”
EG Comment: The key phrase is “localized tactical denial of GPS civil signals…”. Wow, what can I say about that? Come on GLONASS/CDMA, and Galileo, hurry up!
“Military use of GPS civil signals —
“DoD does not have an operational requirement to use the GPS civil signals, designated L1C, L2C, and L5, or the Wide Area Augmentation System (WAAS), with the exception of the Army validated WAAS requirement documented in the Global Air Traffic Management (GATM) Operational Requirements Document (ORD). Since DoD policy prohibits the use of civil signals or augmentation systems in wartime environments and dual equipage is not fiscally practical, type approval of military aviation receivers is required to eliminate the need for civil GPS equipage on military aircraft. This will provide an enhanced capability to span the operational environment for military aviation—from flight in civil airspace in peacetime to combat operations worldwide. Commercial operators of Civil Reserve Air Fleet (CRAF) airframes may elect to equip with L5 and/or WAAS if there is a demonstrated.”
EG Comment: Interesting.
“Mitigating Disruptions in Aviation Operations —
“A loss of GPS service, due to either intentional or unintentional interference, in the absence of any other means of navigation, would have varying negative effects on air traffic operations. These effects could range from nuisance events requiring standard restoration of capabilities, to an inability to provide normal air traffic control service within one or more sectors of airspace (the NAS is divided into hundreds of air traffic control sectors. A single air traffic controller has the responsibility to keep aircraft safely separated from one another within each sector and from other sectors. Sector dimensions vary, and are established based on predominant traffic flows, altitude, and controller workload) for a significant period of time.
“In addition to FAA plans of retaining a minimum network of VOR, DME, and ILS facilities to serve as a backup to GPS for the
near future, several other solutions have been identified to help mitigate the effects of a satellite navigation (SATNAV) service disruption:
“The L5 civil frequency planned for GPS will help mitigate the impacts of both solar activity and unintentional interference, but it may be 2018 before a full constellation of dual-frequency satellites (L1 and L5) is available. The dual frequency capability with L5 will address ionospheric scintillation by enabling receivers to calculate
actual ionospheric corrections, thereby preserving LPV capability during severe ionospheric storms.
Modern transport-category turbojet aircraft with inertial systems may be able to continue navigating safely for a period of time after losing radionavigation position updating depending on the route or procedure being flown. In some cases, this capability may prove adequate to depart an area with localized jamming or proceed under visual flight rules during good visibility and high ceilings, however, inertial performance without radionavigation updates degrades with time and will eventually fail to meet airspace requirements.
Integrated GPS/inertial avionics having anti-jam capability could reduce the area affected by GPS jamming or unintentional interference. Industry research is proceeding to develop this technology, with an expectation that it might be marketed to the general aviation community at some point in the future.
Users may have an option to equip with instrument flight rules (IFR)-certified Loran avionics, pending the improvements needed to achieve a nonprecision instrument approach capability with eLoran. A combined eLoran/SATNAV receiver could provide navigation and nonprecision instrument approach service throughout any disruption to SATNAV service.
EG Comment: This is a good description of the GPS strategy for aviation operations. But, honestly, if there’s a disruption once the National Airspace System (NAS) is fully reliant on GPS, it’s hard to see there not being major, major hiccups in the air traffic system.
“Mitigating disruptions in land operations —
“Surface transportation users currently use radionavigation services from GPS and its augmentations to supplement other available nonradionavigation systems. Under this operational paradigm, users seamlessly use other existing techniques to mitigate both the short-term loss of GPS due to obstructions and the longer-term loss due to failed on-board user equipment and adverse operating environments. In future applications, accuracy requirements are expected to become much more stringent, and GPS and its augmentations are likely to play a more critical role. The loss of GPS and its augmentations will be carefully evaluated within the overall operational environment to ensure continued safe and efficient operation of the land transportation system.
“Surface transportation agencies are working with industry to ensure that safety critical systems that use GPS and its augmentations consider the loss of these radionavigation services and are able to mitigate its effects in order to continue safe and efficient operation of the nation’s surface transportation infrastructure. This is accomplished today by outreach to user groups and local transportation agencies and defining minimum operational or functional standards. In the future, training for application developers, state and local highway and transit agencies, and motor carriers on the operational capabilities of GPS as well as what to do when failures occur may be necessary. Finally, since it is expected that signal availability from GPS may not be adequate for surface users experiencing canopy/urban obstructions, alternate systems that perform a verification test on the GPS navigation solution and that support continued operation in the event of a loss of GPS will be employed in a system-of-systems configuration.”
EG Comment: A great argument for multi-constellation receivers.
“Mitigating disruptions in non-navigation applications —
“Common positioning applications include: surveying and mapping; precision agriculture; emergency response and law enforcement; fire services; environmental resource management; utility location and management; asset inventory and management; and logistics. These applications have a highly variable duration and involve sporadic areas of operation. Because of the flexible character of positioning applications, operations will typically be halted until the GPS or GPS Augmentation signal is restored in an area. Optical and inertial surveying equipment are back-up options that could meet the accuracy requirements of these applications, depending on the capabilities and preparation of these operators.”
EG Comment: Multi-constellation receivers have already proven their value in non-navigation applications.
“Operating Plans – GPS —
“DoD will provide a 48-hour advance notice of changes in the constellation operational status that affect the service being provided to GPS SPS users in peacetime, other than planned GPS interference testing. The USG provides notification of changes in constellation operational status that affect the service being provided to GPS users or if a problem in meeting performance standards is anticipated. In the case of a scheduled event affecting service provided to GPS users, the USG will issue an appropriate Notice Advisory to Navstar Users (NANU) at least 48 hours prior to the event, in accordance with the GPS Standard Positioning Service Performance Standard (Ref. 9).
“Coordination of planned interference testing activities nominally begins 60 days before testing events. Users are notified by the USCG as soon as an activity is approved, and by FAA typically not earlier than 72 hours before an activity begins. DoD notice will be given to the USCG Navigation Information Service (NIS) and the FAA Notice to Airmen (NOTAM) system. The NIS and NOTAM systems will announce unplanned system outages resulting from system malfunctions or unscheduled maintenance.
“GPS will be the primary Federally provided radionavigation system for the foreseeable future. GPS will be augmented and improved to satisfy future military and civil requirements for accuracy, coverage, availability, continuity, and integrity. Current policy states that DoD will maintain a nominal 24-satellite constellation, and that replacement satellites will be launched on an anticipated need to maintain the constellation as satellites age and ultimately fail.”
EG Comment: Good policy statement on notification to civil users. You can sign up to receive NANU’s here.
Note the statement regarding maintaining a 24-satellite constellation. There are currently upwards of 30 operational GPS satellites. That’s a healthy number, but the problem is that they are still positioned as 24 satellites. In other words, several are “paired up” so the effective constellation is still only 24. There is discussion within the USG about repositioning some of the satellites to optimize the constellation and improve coverage. More on that soon I hope.
“Maritime and nationwide differential GPS —
“USCG began development of the MDGPS system in the late 1980s to meet the needs of the Coastal and Harbor Entrance and Approach (HEA) phases of
navigation and to enable automated buoy positioning. MDGPS service was certified fully operational in March 1999 after the network met the performance standards required for HEA navigation. PL 105-66, Title III, § 346 (111 Stat. 1449) authorizes the Secretary of Transportation to improve and expand the USCG’s MDGPS into a Nationwide DGPS, or NDGPS, by adding an inland segment. RITA coordinates this inland program and is acting chair of the NDGPS Policy and Implementation Team. Today, multiple Federal agencies, several states, and scientific organizations are cooperating to provide the combined national DGPS utility, with plans to complete NDGPS system coverage throughout the lower 48 states.
“Each NDGPS facility meets all operating parameters established to qualify a MDGPS facility for operational availability, as established by USCG. NDGPS was not designed to meet aviation integrity requirements.
“In addition to providing a real-time broadcast of differential corrections, the U.S. DGPS services provide a robust operational backbone to the DOC’s CORS application for post-processing survey applications and Webenabled location solutions, the National Weather Service’s Forecast Systems Laboratory for short-term precipitation forecasts, and the University NAVSTAR Consortium (UNAVCO) for plate tectonic monitoring. Where operational considerations allow, additional operational capability may be added, such as the broadcast of navigational or meteorological warnings and marine safety information (i.e., NAVTEX data) to support safe navigation at sea.
“Currently 39 USCG and nine USACE broadcast sites provide service for maritime coverage CONUS, the Great Lakes, Puerto Rico, portions of Alaska and Hawaii, and portions of the Mississippi River Basin. The inland NDGPS segment complements the MDGPS segment and is planned to provide dual coverage of the CONUS and selected portions of Hawaii and Alaska as a combined national DGPS utility. There are currently 38 DOT sponsored sites in the NDGPS network providing 92 percent of the contiguous 48 states with single coverage and 65 percent with dual coverage. The combined DGPS service will provide uniform coverage of the CONUS and portions of Hawaii and Alaska, regardless of terrain, or man-made and other surface obstructions. This coverage is achieved by using a medium frequency broadcast optimized for surface applications. The broadcast has been demonstrated to be sufficiently robust to work throughout mountain ranges, difficult terrain and other obstructions. The combined DGPS service will provide a highly reliable GPS integrity function to users to meet the growing requirements of surface users (transportation, precision agriculture, natural resources and environmental management, emergency management and response, and surveying and construction communities).
“As each new Nationwide site is added to the DGPS network, it is evaluated and tested to ensure that it meets the full operational capability specifications commensurate with a safety of life service. Once a site is declared fully operational, the site is monitored and maintained by the USCG to ensure support for safety applications. System coverage for a specific location can be obtained from the USCG Navigation Center (NAVCEN) website, http://www.navcen.uscg.gov.
“The two major deployment milestones have been established as nationwide single station coverage and nationwide dual station coverage (CONUS only). Under single station coverage, predicted to occur no earlier than 2010 (pending funding availability), users anywhere within CONUS will be able to receive at least one DGPS differential correction broadcast. The second major milestone is full coverage by at least two DGPS broadcasts, is expected to occur no earlier than 2012.”
EG Comment: This is a great example of where policy and the presidential budget don’t necessarily agree. NDGPS has been on the budget chopping block for several years. At this point, DOT has only budgeted to maintain the existing system…about $4.6M annually for the 38 DOT-sponsored sites. The 39 USCG and nine USACE sites provide safety-of-life service so their budgets are secure.
“High Accuracy NDGPS —
“The HA-NDGPS research program is sponsored by FHWA and FRA to enhance the performance of NDGPS. The first HA-NDGPS station began broadcasting in a test mode in 2001 with funding from the Interagency GPS Executive Board (IGEB). IGEB recognized the potential benefit to many Federal agencies, states, and the general public of having a nationwide high accuracy system. Two HA-NDGPS reference stations are currently operational and providing 10 to 15 cm accuracy throughout the coverage area. Further improvements to accuracy and the development of 1 to 2 second time-to-alarm integrity are anticipated. Once these improvements are complete, a HA-NDGPS standard will be developed.
“To support this, several approaches are being investigated. They can be grouped into three general categories: improved ionosphere and troposphere prediction; increased data throughput to support broadcast of GPS observables; and the addition of pertinent data to the current broadcast.”
EG Comment: The HA-NDGPS program is one that’s been around a long time. It’s a technology in search of an application. The growth of RTK networks threatens to render HA-NDGPS obsolete. An interesting rumor I heard is that DOT is considering streaming NTRIP data from NDGPS and possibly HA-NDGPS. Essentially, that means one could receive RTCM corrections over the internet via Wi-Fi, mobile phone networks, etc.) and eliminate the bulky and expensive beacon receivers required to use NDGPS today.
“Wide Area Augmentation System (WAAS) —
“WAAS, an SBAS operated by FAA, provides increased navigation accuracy, availability, and integrity for aircraft navigation during departure, en route, arrival, and approach operations. Although designed primarily for aviation applications, WAAS is widely available in receivers manufactured for navigation use by other communities.
“FAA commissioned WAAS in 2003. WAAS service supports departure, en route, arrival, and approach operations, including nonprecision approaches and approach procedures with vertical guidance. The WAAS service may support additional capabilities such as advanced arrival and departure procedures (curved and segmented), more efficient en route navigation and parallel runway operations, runway incursion warnings, high-speed turnoff guidance, and airport surface operations.
“WAAS will be modified to utilize the L5 signal provided by modernized GPS satellites, in lieu of the current semi-codeless L2 signal being utilized to determine ionospheric corrections. New dual-frequency WAAS avionics using L1 and L5 will improve the availability of LPV service.
EG Comment: Note that WAAS is bypassing L2C. It says something about the future of L2C and if it’s really needed. That’s another discussion altogether. Like GPS, WAAS, and SBAS in general is being used in many applications beyond its original intent. There are hundreds of thousands (several million if you include the consumer WAAS users) that outnumber by orders of magnitude the number of WAAS users in aviation.
“The U.S. Continuously Operating Reference Station (CORS) System —
“NOAA’s NGS, an element of DOC, has established a CORS system to support non-navigation post-processing applications of GPS, especially precise 3-dimensional positioning at the few centimeter level. More recently, the CORS network has also served the atmospheric science community as a tr
oposphere and ionosphere monitoring network, and it has served the geophysics community as a crustal motion monitoring network. Additionally, the CORS system is being modernized to serve as the foundation for future applications that support real and near real-time positioning (that differ from navigation applications by the lack of redundancy and integrity monitoring required for safety-of-life applications). The CORS system provides code range and carrier phase data from a nationwide network of GPS stations for access by the Internet.
“As of June 2008, data were being provided from more than 1,200 stations. The NGS manages and coordinates data contributions from GPS tracking stations established by more than 200 other groups rather than by building an independent network of reference stations. In particular, use is being made of data from stations operated by components of DOT and DHS that support real-time navigation requirements (mostly WAAS and NDGPS augmentations). These real-time stations make up approximately 17 percent of all CORS stations. Other stations currently contributing data to CORS include stations operated by NOAA, NSF, and NASA in support of crustal motion activities; stations operated by state and local governments in support of surveying and mapping applications; and stations operated by NOAA’s Earth Systems Research Laboratory, in support of meteorological applications. The breakdown of CORS partners is illustrated in Figure 5-1.
“The national CORS system is a GPS augmentation system managed by NOAA that archives and distributes GPS data for precision positioning and atmospheric modeling applications. It serves as the basis for the National Spatial Reference System, defining high accuracy coordinates for all Federal radionavigation systems. Historically, CORS served postprocessing users of GPS, but is being modernized to support real-time users at a similar level of accuracy.”
EG Comment: What can you say about the CORS system other than that it’s a model for other CORS systems around the world. It says something about the success of the program in that it’s allocated an entire page in the FRP.
Phew, there’s more in the FRP I could quote and discuss but I’ve touched on the major items. Hopefully, this gives you an idea of what the USG thinks about when it makes strategic and tactical decisions about the GPS program. However, keep in mind that in many cases policy and budget don’t match, and if there’s a conflict between the two, budgets usually win.