In my August 2025 GPS World newsletter column, I highlighted that a colleague reminded me that the National Geodetic Survey’s (NGS) new National Spatial Reference System (NSRS) is more than a technical upgrade. It offers a prime opportunity to review and improve current processes and workflows, examine existing products and considerations, and plan strategically for future needs. By auditing geospatial data dependencies now, NSRS users can assess how transitioning to the new datum will affect workflows, datasets and operational decision-making.
Several organizations have formed working groups to address the new NSRS. The National Society of Surveyors (NSPS) has released a story map to inform the professional surveying community and is developing guidance and case studies. The American Association for Geodetic Surveyor (AAGS) is collaborating with NSPS. The American Society of Photogrammetry and Remote Sensing (ASPRS) has prepared materials available on its website. Additionally, under the leadership of Gary Thompson, the North Carolina Geodetic Survey established the North Carolina 2022 Reference Frame Working Group. The group’s goal is to address issues related to the implementation of the datum change in 2026. It includes representatives from North Carolina agencies involved in producing or using geospatial products and services.
| Agencies Involved in the NC 2022 Reference Frame Working Group | ||
| NC Geodetic Survey | NC DOT Hydraulics | NC State Mapping Advisory Committee |
| NC Geographic Information Coordinating Council (GICC) | NC State, Land Records Management | NC Geodetic Survey Advisory Committee |
| NC Center for Geographic Information & Analysis | NC GICC Local Government Committee | NC Society of Surveyors |
| NC DOT State Location & Surveys | NC State Mapping Advisory Committee | Duke Energy |
| NC DOT Photogrammetry Unit | NC GICC Local Government Committee | U.S. National Geodetic Survey |
The organizations participating in the NC RFWG are assessing how changes in the new NSRS may impact their geospatial workflows and evaluating their reliance on NGS products and services. Proactive self-assessment is essential because NGS cannot customize support for each entity’s unique needs and processes. By identifying potential challenges and opportunities early, organizations can adapt smoothly and maintain operational efficiency during the transition. The following were the key action items from the last NC RFWG meeting:
- Create an information sheet to help local governments prepare for the data change
- encourage agencies to consult their software vendors on support measures for the new datums
- establish a rule for when to use the U.S. Survey Foot versus the International Foot
- review current data files to ensure their metadata includes datum and unit information.
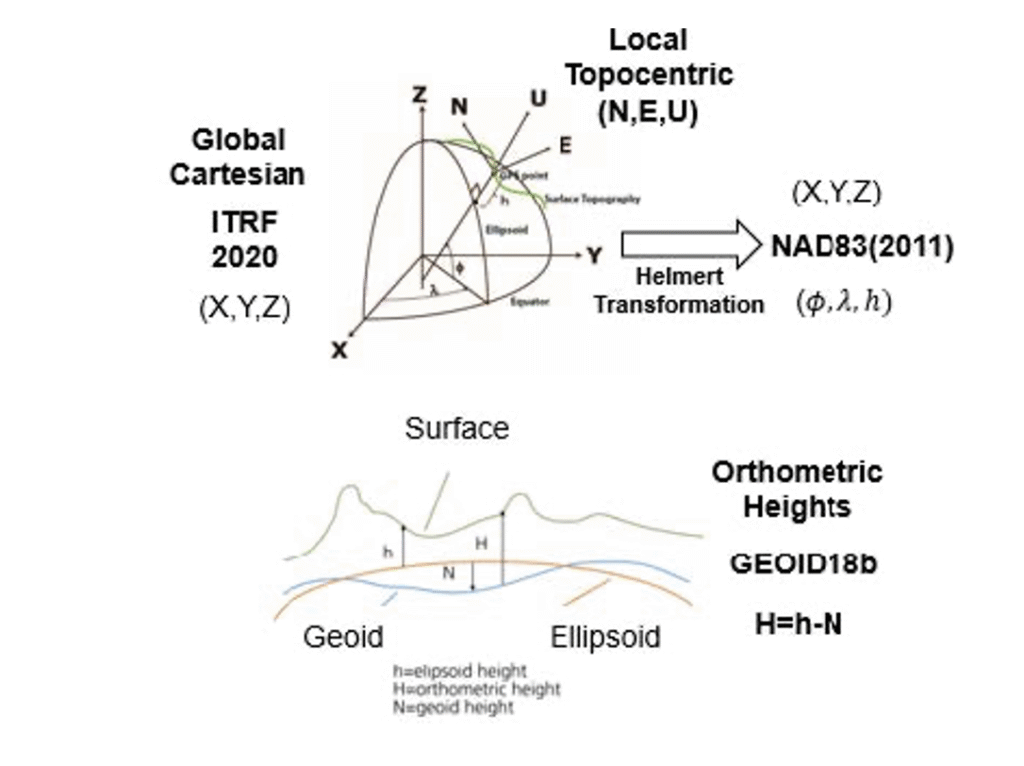
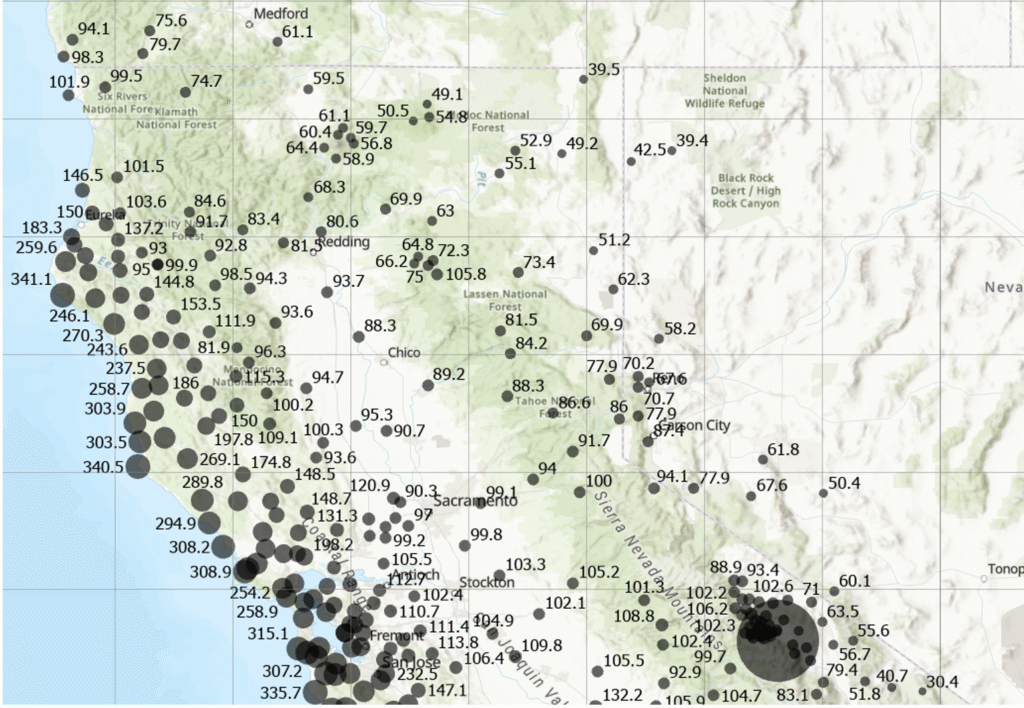
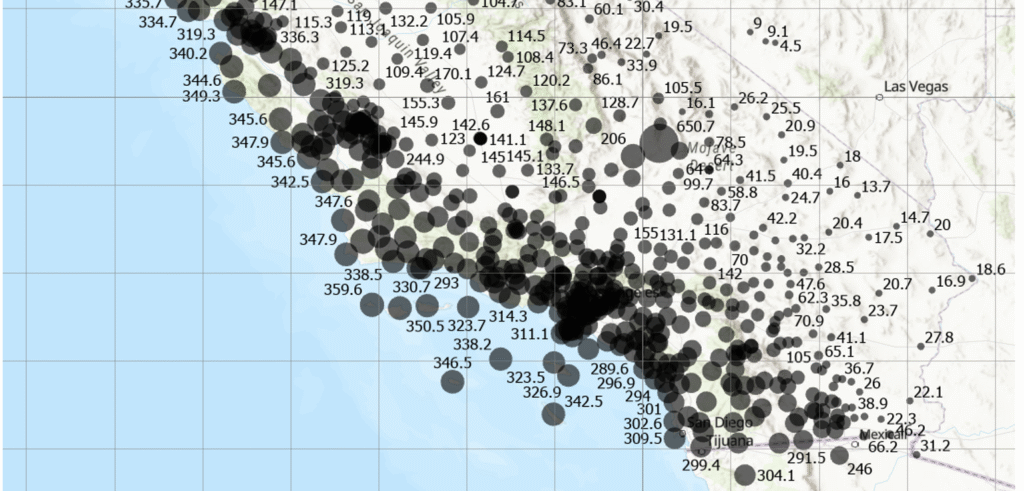
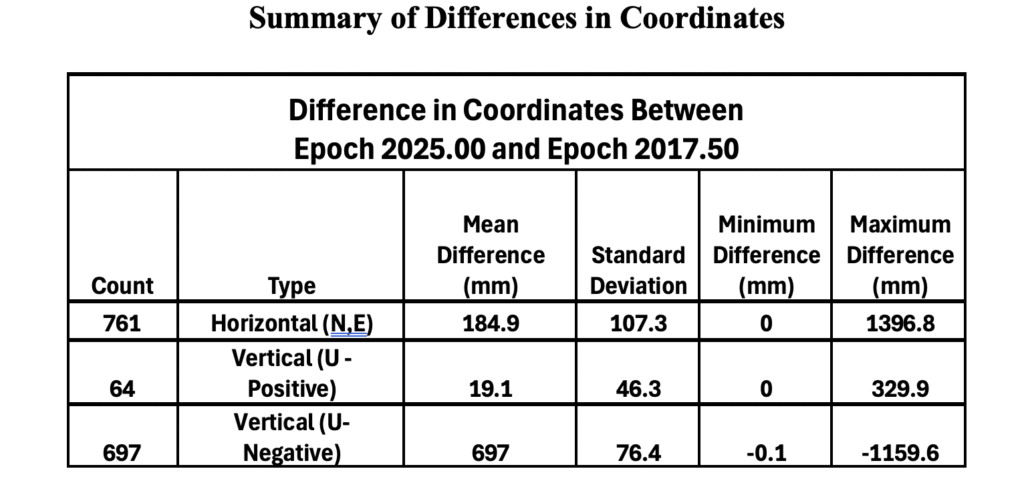
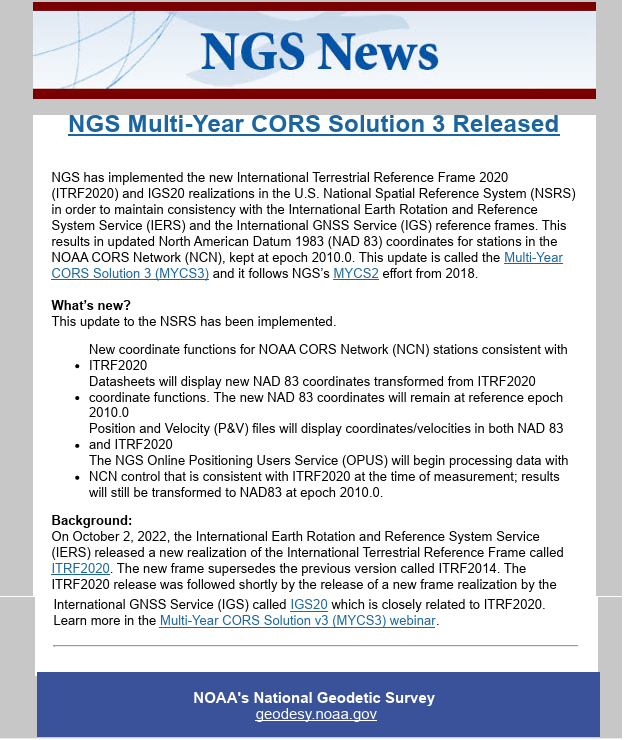
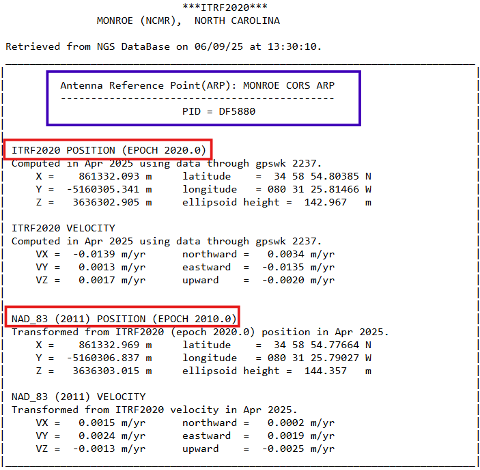
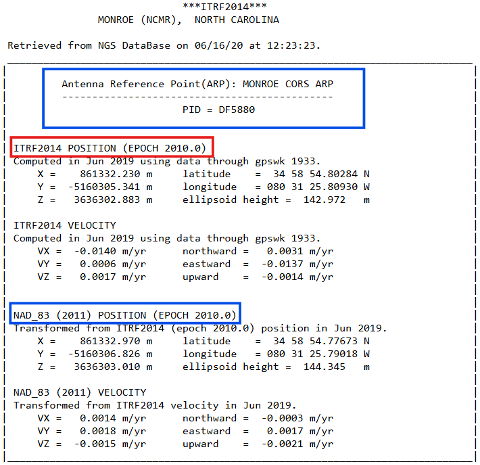
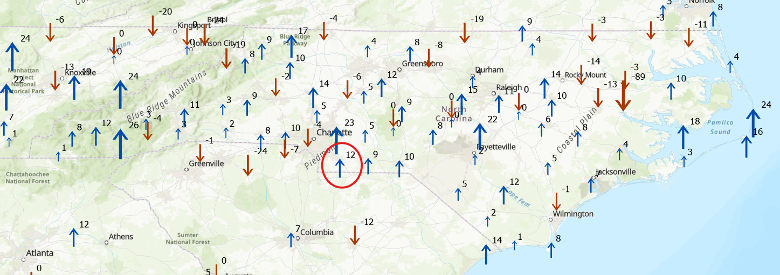
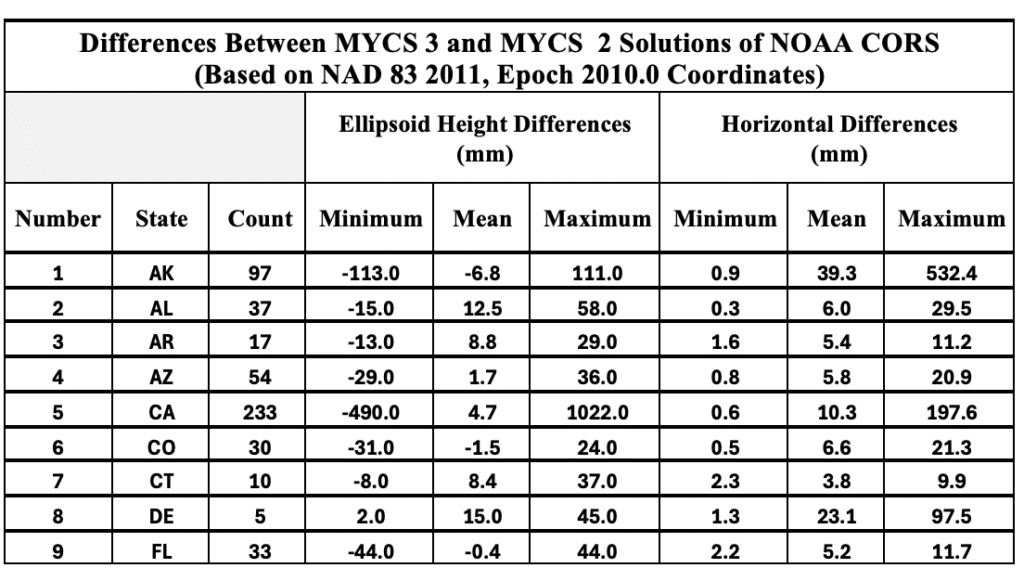
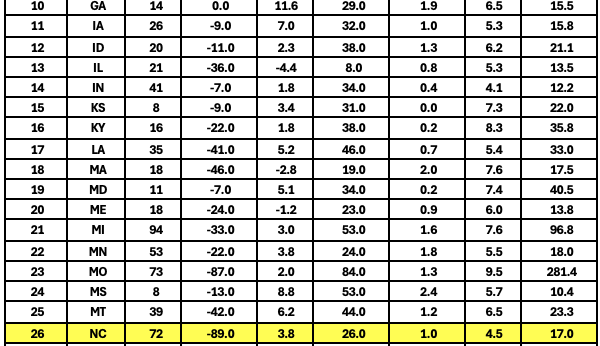
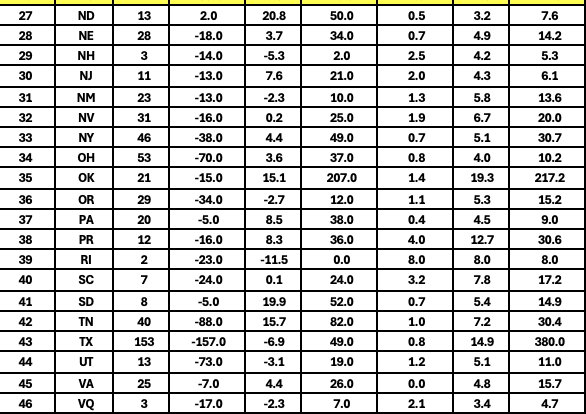
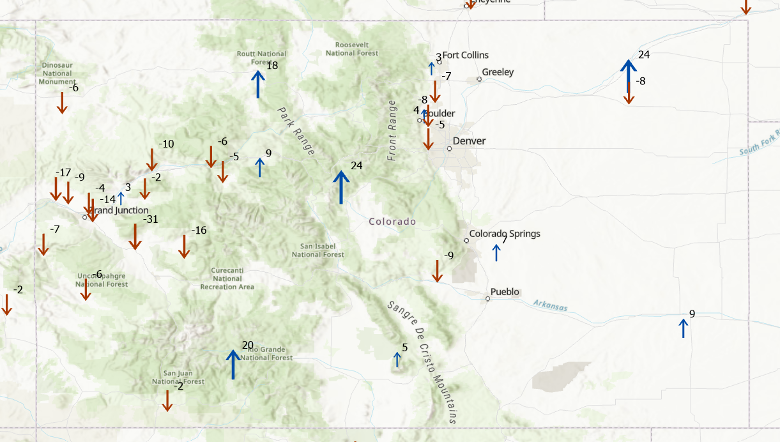
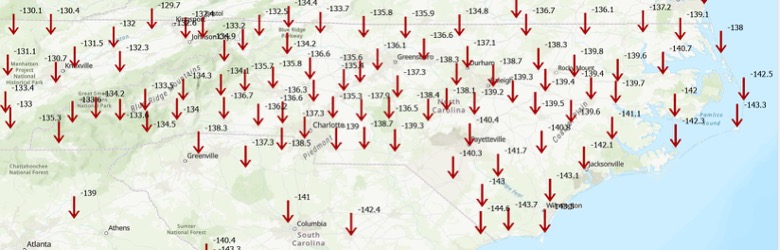
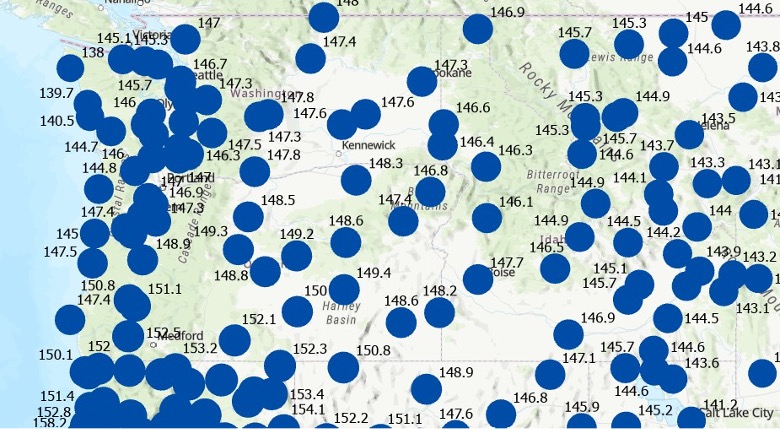
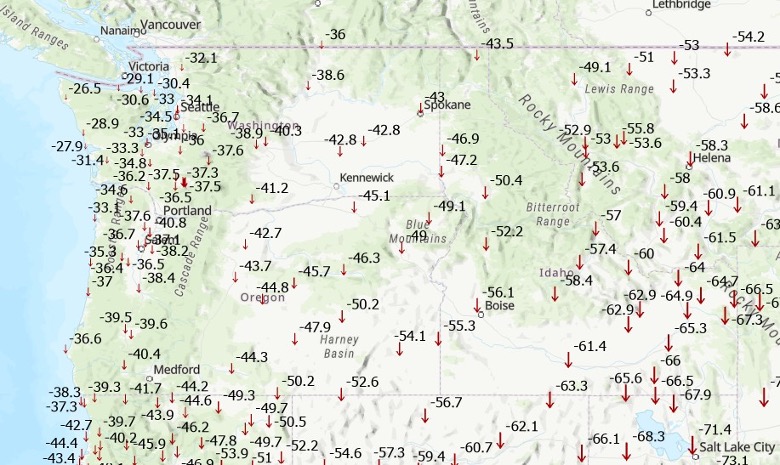
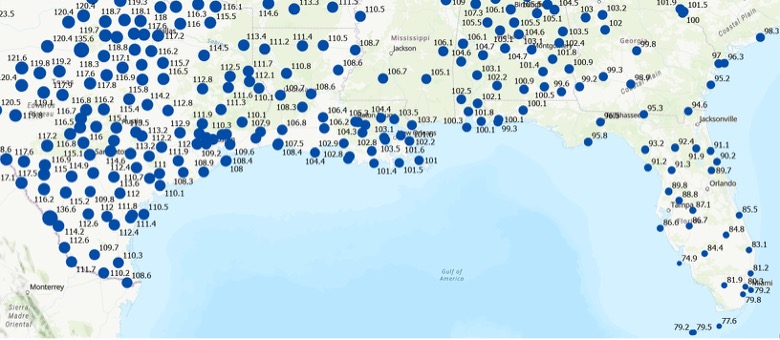
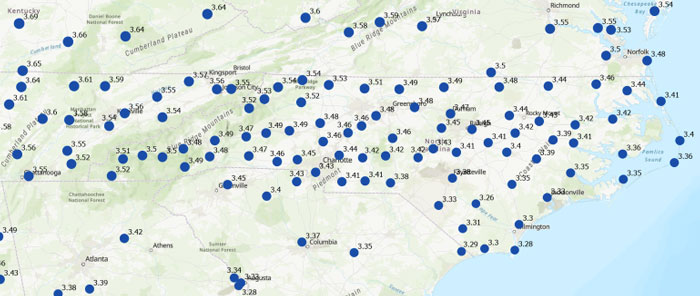
Many participants of the North Carolina working group expressed interest in understanding how much the coordinates will shift with the new NSRS. While NGS’s website offers diagrams that provide a high-level overview of coordinate and product changes, many users sought more detailed information specific to North Carolina. To address this, I used NGS’s Multi-Year CORS Solution 3 (MYCS3) update of the NOAA CORS Network to ITRF2020, epoch 2020.0, to estimate the changes between the current NSRS — NAD 83 2011 (epoch 2010.0) — and the upcoming NSRS in North Carolina, such as NATRF2022 at epoch 2020.0. This approach offers a more detailed view of the magnitude of shifts in local regions. The figure titled “Approximate Differences Between NATRF2022 (Epoch 2020.0) and NAD 83 2011 (Epoch 2010.0) in NC” illustrates the approximate horizontal coordinate differences between the current NSRS and the future NSRS based on NCN CORS data. (Note that these units are in feet.) For additional information on MYCS3 and regional changes across the United States, refer to my August 2025 GPS World column.
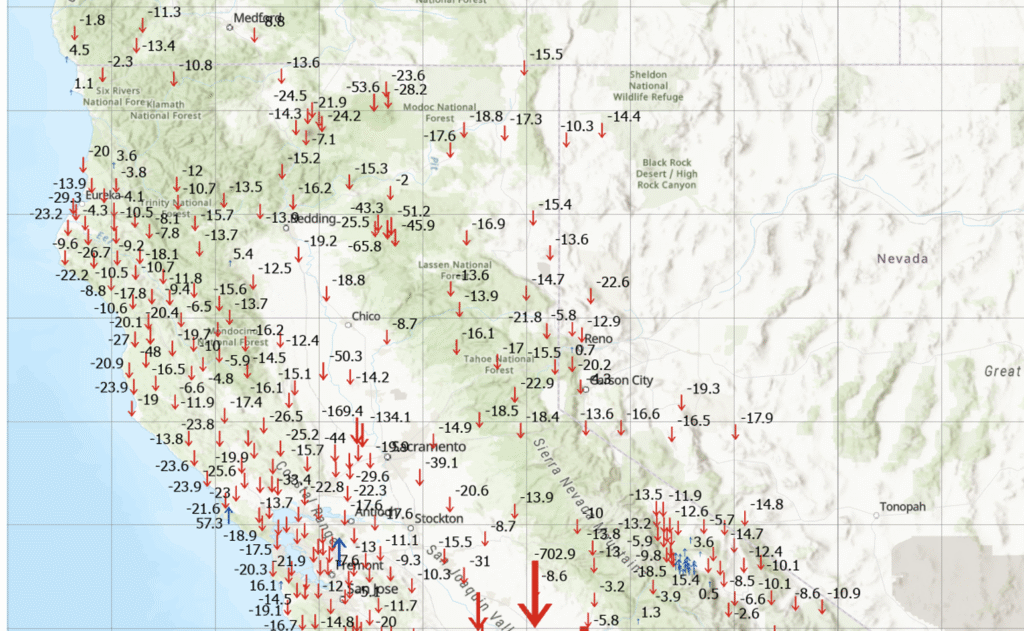
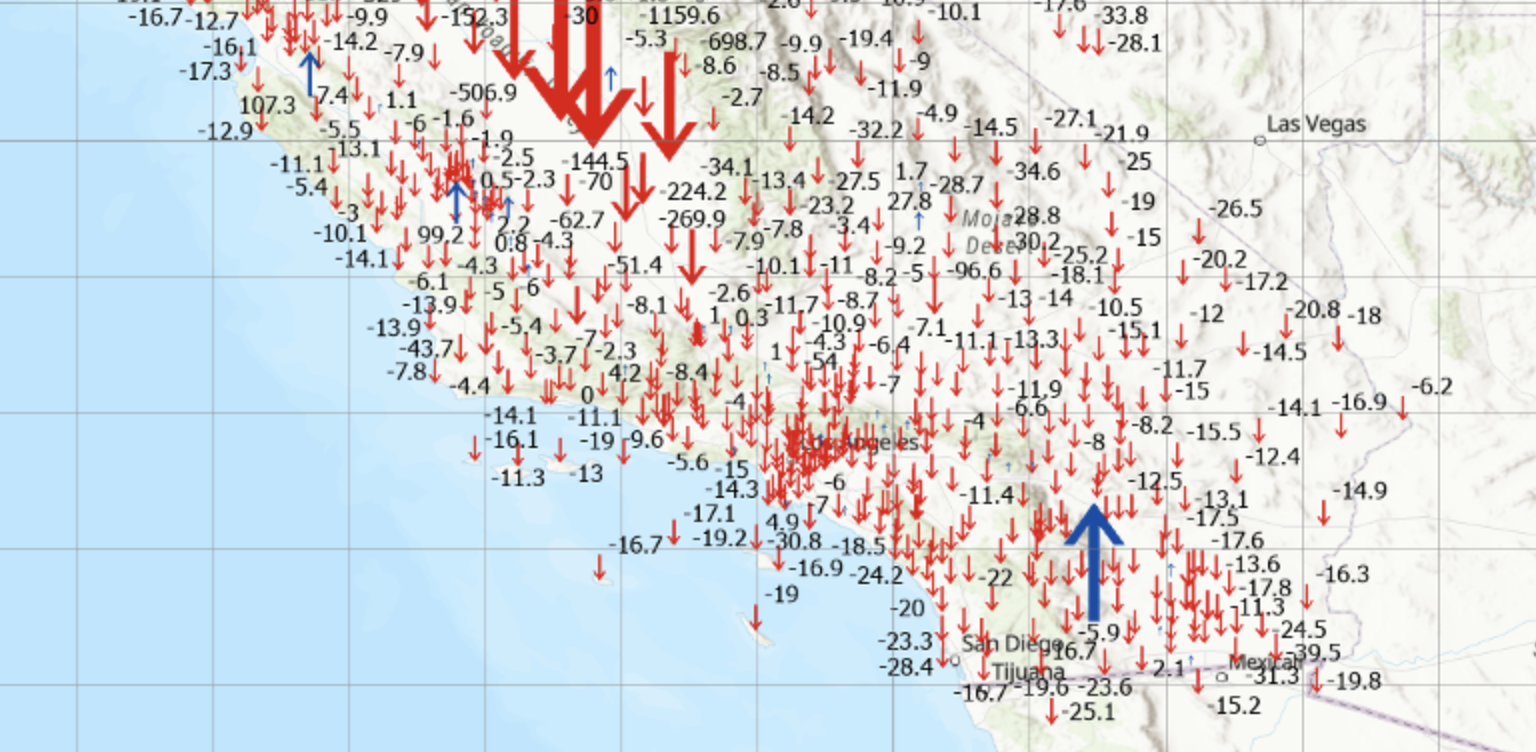
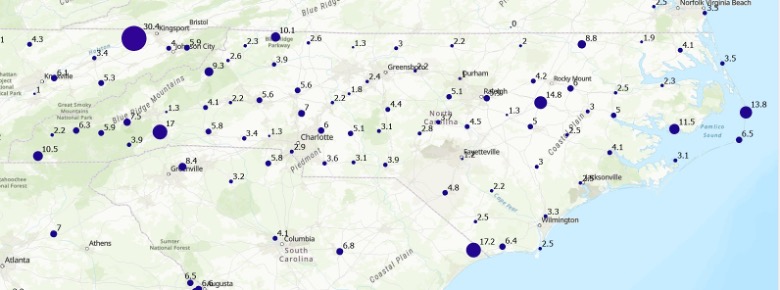
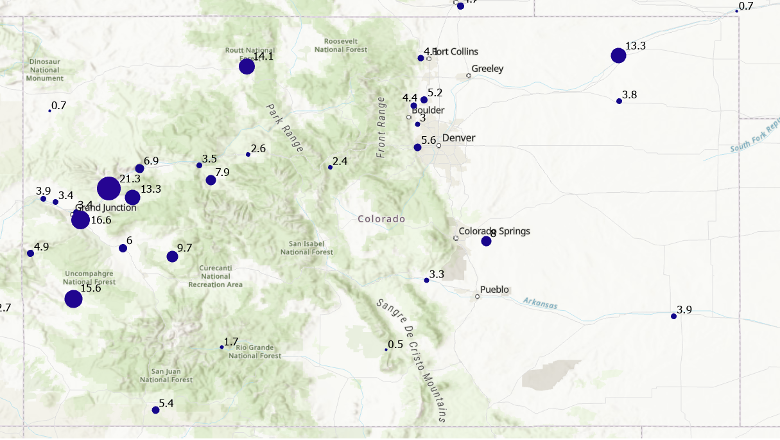
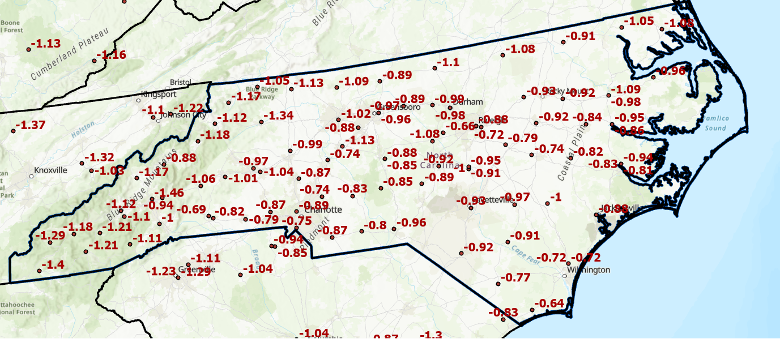
Differences in orthometric heights between the new NAPGD2022 and the current NAVD 88 are significant for anyone working with FEMA flood maps or preparing flood insurance elevation certificates. I used ITRF2020, epoch 2020.0, ellipsoid heights from NOAA CORS stations along with Geoid2022 values to estimate the NAPGD2022 orthometric heights at the CORS sites. As depicted in the plot, the height differences between NAPGD2022 and NAVD 88 across North Carolina range from about 0.5 feet in the southeastern region to over a foot in the northern and western regions. (Note that the units are in feet.)
This type of information should be shared with managers of real-time GNSS networks(RTN). RTN operators could then establish a parallel beta system to enable users to understand how the new NSRS may affect their products and services. (Note: The North Carolina Geodetic Survey, which manages the NC CORS/RTN system, is considering running a pilot parallel RTN based on the new NSRS.) This data can be valuable for RTN users to assess how coordinate changes might influence their workflows. For example, it can help determine how the shifts in coordinates will affect agricultural activities such as planting, fertilizing and harvesting. Will farmers need to remap their fields, or will a transformation be sufficient?
Fostering collaboration with stakeholders and constituents will help users better understand how the NSRS modernization impacts their products and services. Developing strategies to align geospatial data management with regulatory requirements and operational objectives will also facilitate a smoother implementation process. NGS is partnering with federal agencies and professional societies to create a self-assessment guide that helps organizations evaluate how the NSRS update affects their geospatial missions. As previously mentioned, the North Carolina 2022 Reference Frame Working Group is working with state and local agencies, as well as surveyors, to proactively address key questions and challenges. This collaboration aims to improve communication with NGS and determine whether their products and services need to be reprocessed, re-surveyed or transformed to suit the new standards.
Each organization has its own unique geospatial requirements and a thorough understanding of its mission and needs. This is an ideal opportunity to develop a centralized plan for evaluating and managing geospatial workflows during the transition to the modernized NSRS. Challenges include aligning legacy datasets with new reference standards while ensuring data integrity. Organizations should assess the accuracy of their data in relation to the NSRS and document any necessary updates in metadata. By creating a well-structured plan that balances operational constraints, legal compliance and practical considerations, organizations can prioritize accuracy, efficiency and alignment with the updated NSRS.
To assist others in preparing for the new NSRS, Dana J. Caccamise II, NGS regional geodetic advisor, has developed guidance materials that have been shared with federal agencies — including the FGDC and their team leaders — and professional organizations such as NSPS, ASPRS and AAGS. See the boxes titled “Questions to Guide a Self-Assessment of Your Operation and Products” and “List of NGS Products and Services — Are your workflows dependent on one or more NGS products.” The goal is to help these agencies become ready to implement the new NSRS once it is officially adopted by NGS.
| Questions to Guide a Self-Assessment of Your Operation and Products |
| Are you generating or using geospatial data (or doing both)? – If so, your workflows are likely dependent on geodetic control tied to one or more NGS products. The upcoming NSRS update will affect these dependencies. (See “List of NGS Products and Services.”) |
| Do you know if your mission, project, or datasets depend on NGS products? – Identifying whether and how your entity relies on NGS products is a critical first step in assessing potential impacts. |
| What are your accuracy, precision, and shelf-life requirements for geospatial data? – Understanding your mission’s specific data requirements ensures you can evaluate whether NSRS modernization will meet your operational needs without unnecessary adjustments. This should include plans to accommodate greater accuracy in the future. |
| Do you know how your entity accesses and utilizes geospatial data? – Are you obtaining it directly from NGS or indirectly through third-party vendors (e.g., RTN systems, GIS platforms, GNSS companies)? – Have you considered how updates to NGS products may impact the tools or services you rely on from these vendors? – Many entities rely on geodetic control without realizing it. NGS’s foundational data and frameworks are often invisible and seamlessly embedded within the tools and services offered by third-party vendors, such as GIS platforms, survey equipment, and software providers. These vendors, in turn, depend heavily on NGS products like the NSRS to ensure their tools are accurate and functional. Understanding this indirect reliance is crucial for preparing your workflows and ensuring continuity as the NSRS is modernized. |
| Where does your entity fit in with the geodetic workflow? – Does your entity create integral products (e.g., GNSS data, lidar data) on which other products depend? – Does it produce derivative products (e.g., DTM, Topographic Map, Flood Insurance Rate Map (FIRM) and Flood Insurance Study (FIS) Report)? – Evaluating these dependencies will help you determine the scope of NSRS modernization impacts. |
| What are your project requirements for data accuracy and longevity? – Assess whether your data accuracy thresholds and long-term usability align with the modernized NSRS. |
| Have you evaluated workflows and identified potential impacts in areas affected by significant ground movement (e.g., regions with tectonic shifts, vertical land motion, and, most notably, subsidence) – Identifying potential risk or disruption areas can guide prioritization and help mitigate impacts on critical operations. |
List of NGS Products and Services
Are your workflows dependent on one or more NGS products
| Products and Services | Examples |
| Geodetic Control Data | – Datasheets – State Plane CoordinatesSurvey – MarksSurvey Data |
| National Spatial Reference System (NSRS) Datasets | – Horizontal (Geometric) reference frames – Vertical (Orthometric / Physical) datums – Geoid Models |
| NSRS Tools and Resources | NGS Geodetic Tool Kit – NGS PC Software such as ADJUST – User-Contributed Software – VDatum to convert elevation data – Other NSRS Resources such as transformation tools |
| GNSS Data and Solutions | OPUS (Online Positioning User Service) – CORS (Continuously Operating Reference Stations) – Satellite Orbits |
| Gravity Data | – Gravity for the Redefinition of the American Vertical Datum (GRAV-D) – Deflection of the Vertical (DoV) |
| Coastal Mapping Products | – Topobathy lidar Data – Shoreline Mapping Products |
| Aerial Imagery and Remote Sensing | – NOAA Remote Sensing Division Products such as Emergency response imagery (e.g., hurricane damage) |
| Analytical tools | – Least squares analysis tool – Antenna Calibrations |
| GIS and Visualization Tools | – Geospatial Data such as Shapefiles and KML files for GIS applications – Web Services |
| Educational and Reference Materials | – Documentation such as NGS technical reports – Presentations and Posters – User support such as NGS Information Center and Regional Geodetic advisors |
| Historical Data Archives | – Legacy Products such as Older geodetic survey records and Superseded geoid models and transformation tools |
| Standards and Procedures, best practices, data formats | – Standards and Procedures such as NOAA Technical Memorandum NOS NGS 92 – Data Formats such as GVX (Real-time or post-processed GNSS vectors) |
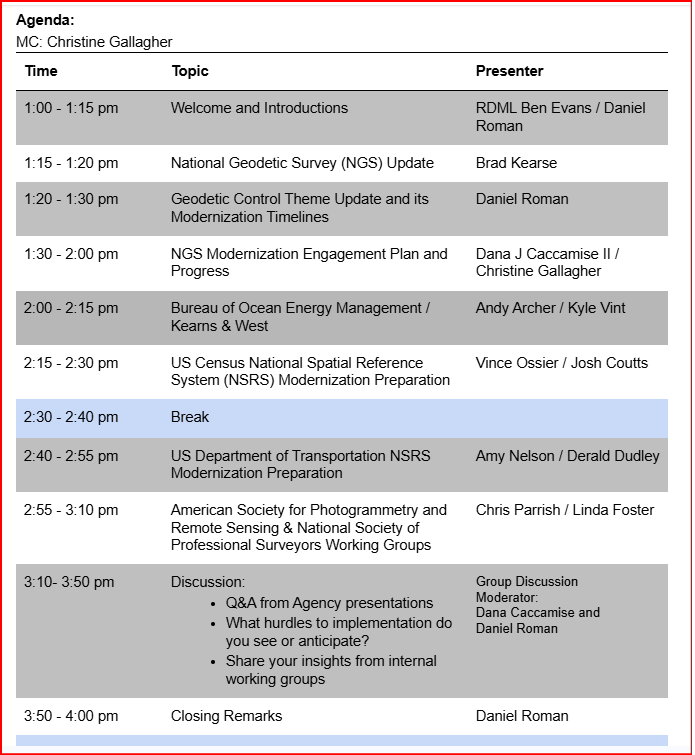
To support the increased awareness of the modernization of the NSRS, under the auspices of the Federal Geodetic Control Subcommittee, NGS will host a meeting with federal geospatial agencies on Oct. 15, 2025, to discuss the NSRS modernization. The primary objectives of this meeting are to:
- Increase awareness of the NSRS modernization rollout schedule and engagement strategy, including self-assessment and interaction between official departmental working groups.
- Within other departments, connect decision-makers to those who accomplish NSRS modernization tasks and designate points of contact to interface with NGS capacity building efforts.
- Share experiences and strategies among federal agencies concerning NSRS modernization self-assessment and preparation.
- Gather questions, discuss anticipated challenges and identify opportunities to support each other through this transition.
It is my understanding that this meeting is open to the public (virtually) for listening and observation. See below for more information on the meeting.
Federal Geodetic Control Subcommittee Meeting
- Date: Wednesday, October 15, 2025
- Time: 1:00 PM – 4:00 PM ET
- To attend virtually, here is the registration link
I recommend that NSRS users consult guidance from NGS and engage with professional societies that have established working groups to analyze the impact of the new NSRS on geospatial products and services. Getting involved now will help ensure you are prepared when NGS officially adopts the updated NSRS. As Dru Smith, NGS NSRS modernization manager, explained in his webinar titled “NSRS Modernization — Big Steps Forward and What Comes Next” on Aug. 14, 2025, once the initial set of products and services of the modernized NSRS is “official,” the new NSRS becomes “The NSRS,” and its implementation then begins.
Are you prepared to implement the new NSRS once NGS officially adopts it? Do you have the necessary tools and resources in place to support a smooth transition? This newsletter highlighted several actions that users can take now to ensure they are ready to implement the new NSRS when it becomes official.