Every six minutes, somewhere in the United States, an underground utility line is damaged by careless excavation. Such incidents not only disrupt electrical, gas, and other services but also create serious environmental hazards. For example, a broken gas line could trigger an explosion that puts people and property at risk. Utilities and local distribution companies (LDCs) are embracing geospatial analytics and artificial intelligence (AI) to prevent or limit damage to buried cables and pipelines.
The Common Ground Alliance (CGA) estimates that in 2019, excavation damage cost U.S. utilities $30 billion, including the cost of lost service, emergency response, and repairs. The Pipeline and Hazardous Materials Safety Administration (PHMSA) estimates that pipeline excavation incidents continue to rise, averaging 1.45 per day in 2024.
Despite local regulations and 811 lines to “call before you dig,” excavation breaches continue to grow due to a lack of visibility and up-to-date information about underground lines. Utilities can’t give contractors and excavation crews accurate information about buried assets that are invisible from the surface.
Satellite imaging and spectral sensing technology provide utilities with the means to monitor rights-of-way, identify excavation threats, and troubleshoot problems such as gas and water leaks. AI-powered geospatial analytics are the modern canary in the coal mine for hazardous leaks and service disruptions.
Keeping Track of Buried Service Assets
Keeping track of underground assets is an ongoing challenge for pipeline operators, utilities, and LDCs. The traditional method of tracking buried assets is periodic field observations. Right-of-way inspections and 811 locate ticket programs are typically initiated before third-party excavations, but these manual methods leave a dangerous visibility gap.
Inspections are needed every 30 to 90 days, which is costly since they require rolling trucks with human inspectors. Manual inspections can also provide only limited coverage, particularly in remote and hard-to-access areas. Even with regularly scheduled inspections, encroachments may go undetected for weeks or months. The result is a vulnerability window between inspections.
The CGA reports that failure to notify 811 and inaccurate location information are among the top contributors to excavation incidents. Even when appropriate dig notices are filed, construction grading or trenching often begins before infrastructure owners can respond to dig requests.
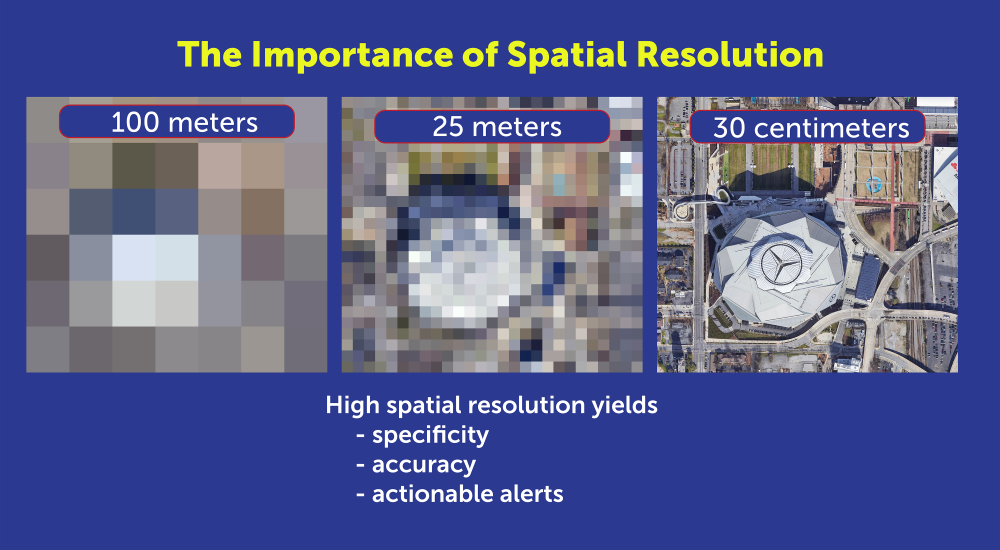
Advances in remote sensing, AI, and GIS now enable utilities to monitor rights-of-way from 270 miles up. Using satellite imaging and AI algorithms, utilities can continuously monitor pipeline and cable corridors and help close the visibility gap. Commercial satellite images from providers such as Airbus and Vantor (formerly known as Maxar) can provide high-resolution imagery for cloud-based AI processing that can detect changes as small as 30 centimeters, about the size of a dinner plate. Using satellite imaging is also faster and more cost-effective than using drones or aircraft, because cloud computing resources can analyze images in hours, rather than days or weeks.
To power geospatial analytics, remote sensing technology (RST) captures multispectral and hyperspectral data from high-resolution satellite sensors, then uses AI-powered algorithms to analyze spectral signatures. Spectral imaging can detect a wide range of surface activity, including soil disturbances, vegetation changes, soil grading and trenching, new construction starts, heavy equipment use, new access roads, and encroachment on utility easements; activities that could indicate a risk to buried cables and pipelines.
Integrating Geospatial AI with ArcGIS
To make potential problems easier to identify, high-resolution images and geospatial analyses can be fused with GIS asset layers and corridor models to pinpoint anomalies that could indicate excavations or construction that interfere with utility rights-of-way.
Utilities that already use ArcGIS as their system of record can readily integrate results from geospatial analytics into existing workflows. For example, users can visualize and detect disturbed layers using ArcGIS Pro, tracking surface risk trends and KPIs with ArcGIS dashboards.
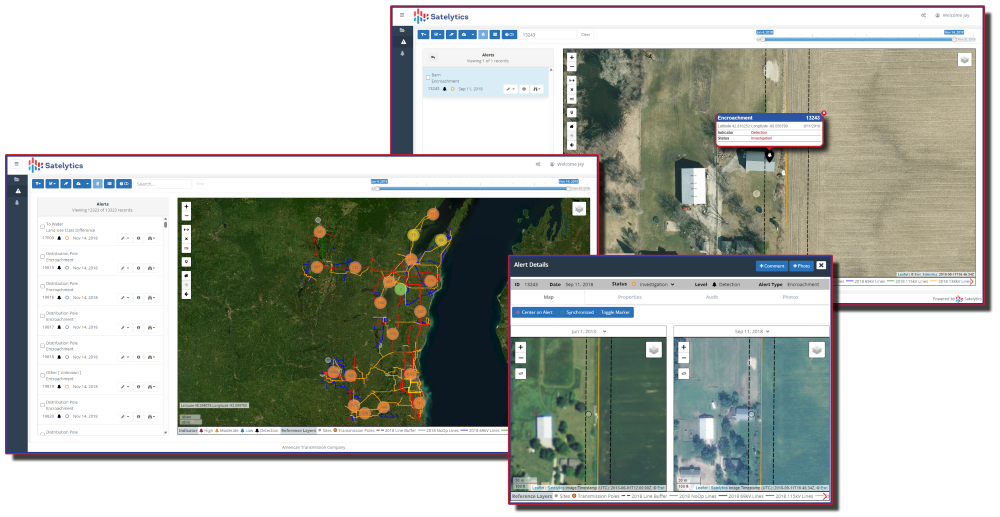
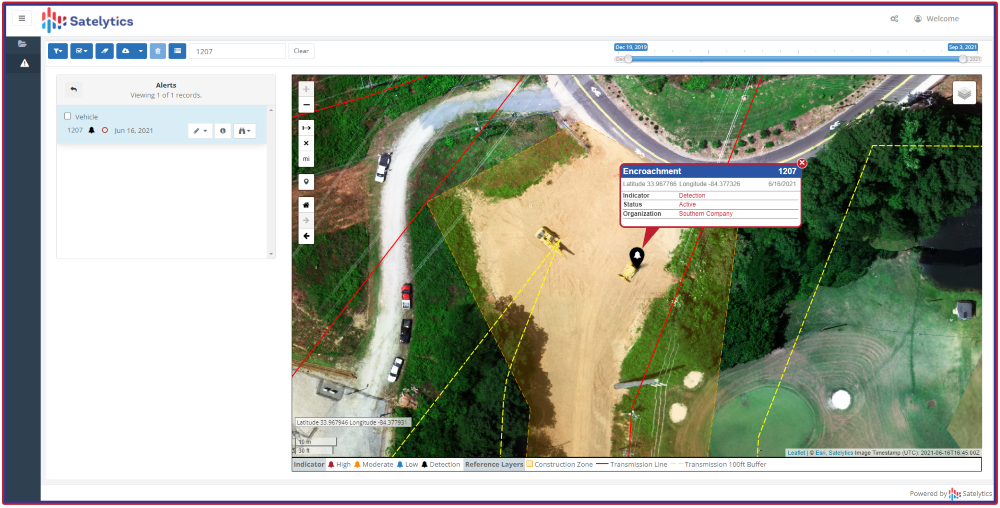
To show how this works, Southern Company, which owns Georgia Power, Alabama Power and Mississippi Power, needed to identify new construction along its service corridors to detect potential encroachments before construction. Southern Company established a quarterly monitoring schedule with Satelytics, a provider of cloud-based geospatial analytics software.
Using data from the Pleiades 1A and 1B satellites, Satelytics captured multispectral imagery at 50-centimeter resolution, then used AI-poweredanalytics to detect changes, such as new barns, parking lots, or other construction. Encroachment alerts were delivered through the Satelytics web portal, and the geospatial data was transferred directly to Southern Company’s ArcGIS system via application programming interfaces (APIs).
Southern Company then compared items flagged in the satellite images with field visits to fine-tune the AI models. Following the pilot program, the AI models were refined to flag only those encroachments that posed a danger or a problem.
AI-powered geospatial analytics strengthens Enhanced Positive Response (EPR) by documenting risk locations, including map layers and images, and providing evidence of corridor conflicts and surface changes. While AI accelerates detection, ground truthing remains essential. As shown in our Southern Company example, on-site validation is required to improve machine learning algorithms to increase accuracy. Integrating Field Maps and Survey 123 into AI workflows can verify findings and prioritize responses.
Using AI and GIS for Predictive Dig Safety
Geospatial AI technology is becoming an essential tool for more than just excavation monitoring. Using AI to analyze satellite images offers other benefits, such as measuring gas leaks or tracking water and oil leaks. Combining AI, GIS, and historical data will soon be used for predictive excavation risk management, identifying high-risk areas in advance of filing an excavation permit.
Predictive analytics will continue to play a larger role in excavation monitoring. AI analytics will provide construction forecasts and enable permit intelligence layers in GIS. The same data can power dynamic risk scoring dashboards and support three-dimensional corridor safety twins.
As new building construction continues to boom, utilities are harnessing the latest technology to prevent excavation incidents and protect underground assets. Combining satellite imagery, AI, and GIS provides the advanced tools needed to maintain continuous asset awareness, closing the visibility gap for underground cables and pipelines. Pipeline operators, electric utilities, and LDCs are reducing operating costs and minimizing environmental impact by leveraging geospatial analytics powered by artificial intelligence.
Sean Donegan is CEO of Satelytics, a company that uses cloud-based, geospatial analytics to analyze multispectral and hyperspectral imagery to identify pipeline leaks and other environmental issues. Donegan has over 30 years of experience building technology and software companies.