While not as glamorous as mild-mannered Clark Kent holding down a day job while Superman comes to the rescue in time of crisis, there are professional surveyors who work day jobs to perform our duties as practitioners to make a living and participate in association activities in their off-hours to help promote and protect their profession as well as the public they serve.
Many of the hours spent to protect the profession are in the political arena, where the battle for budget dollars and service rights are fought on nearly a daily basis. Because of the reliance of the surveyor on technological advances, the profession has been thrust into the political arena at all legislative levels. The surveyor has been tasked with leading the discussion and help the public understand why significant dollars are needed for funding many different programs to continue with our high-tech trends and lifestyles.

The role of the surveyor has not been considered political even though several significant U.S. presidents were surveyors in their early careers. Surveyors aren’t particularly known for their public personas, much less their political prowess. Other than states that still have county surveyors, rarely do practitioners stray beyond local municipal government. One is more likely to see a professional engineer or architect as an elected official than a surveyor, but that doesn’t mean the issues we face are any less important.
My current position is a professional land surveyor with a full-time job overseeing a department in a multi-discipline office in a major metropolitan area. Besides being a contributing editor to GPS World through these articles, I also voluntarily wear many hats within our state association and the national surveying society. Several of these hats are government affairs positions at both state and federal levels, as it has become a full-time operation to keep a watchful eye at all governmental levels. From changes in regulations, budgetary revisions and threats to our professionl by outside entities, government affairs take a small army of people to keep abreast of all situations.
This month’s submission is just a snapshot of the current National Society of Professional Surveyors (NSPS) Joint Government Affairs Committee action item list being addressed and monitored through its committee members and a governmental lobbyist. The importance of this list is to give the reader a sampling of the seemingly endless battles being waged on Capitol Hill by NSPS and its members nationwide.
All these issues have GNSS at their heart and will have dire consequences if any of these subjects fall short of their intended marks.
This is not just about the GNSS and how we collect data; it’s also about the necessity of large scale data collection to provide better and safer services to the citizens of the United States and its territories.
Our current datasets and standards for data collection, like our infrastructure, is aging and lacking in detail. Serious upgrades are overdue, so several actions have been put forth to try to rectify the shortcomings.
3DEP
Formally known as the 3D Elevation Program, this language was introduced as part of S. 1460 (“Energy and Natural Resources Act of 2017”) by Senator Lisa Murkowski of Alaska. This program is being created so that consistent elevation data, cultivated through many surveying and mapping sources including lidar, will be available for efficient design use throughout the American infrastructure.
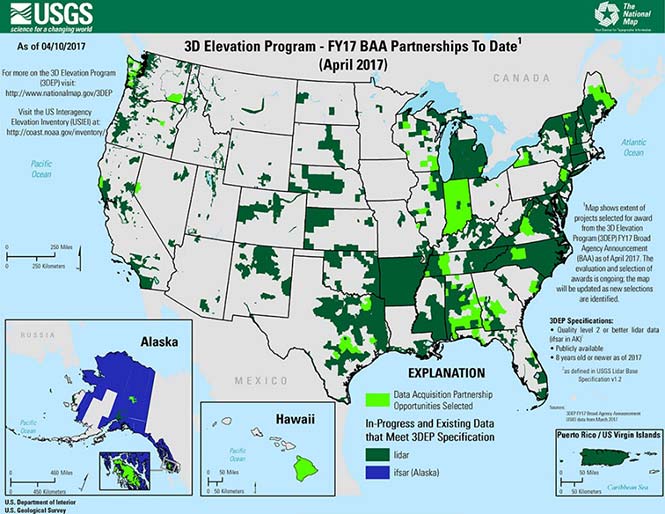 While it currently does not have a single line item in any budget, the USGS Budget Summary lists its necessity in the Core Science Systems Program as part of the National Geospatial Program. This program is intended to provide high-quality topographic, geologic and hydrographic data nationwide to assist with further development of energy, transportation, drainage, emergency response and hazard mitigation.
While it currently does not have a single line item in any budget, the USGS Budget Summary lists its necessity in the Core Science Systems Program as part of the National Geospatial Program. This program is intended to provide high-quality topographic, geologic and hydrographic data nationwide to assist with further development of energy, transportation, drainage, emergency response and hazard mitigation.
As part of the 2019 President’s Budget, the USGS Green Book also lists having the entire nation covered by an ongoing lidar program by 2033, along with completing a significant amount of data collection by various means in Alaska by 2022, including high-resolution interferometric synthetic aperture radar (IfSAR) necessary for data collection in more difficult terrain.
The Green Book also lists high-resolution hydrographic data to support flood risk management studies, as the frequency of large scale flooding seems to be increasing substantially in more places than ever before. It also includes additional mapping data, programming and functionality for emergency personnel charged with oversight of public safety in times of crisis.
FAA reauthorization
The current FAA authorization bill expires on March 31. The biggest hang up holding up getting the bill reauthorized is privatization of the air traffic controllers, but there are rumors of tightening of UAV rules due to the rapidly growing use of the vehicles for business and personal use.
Surveyors are working with federal and state officials to help implement reasonable rules for use and coverage of the UAV as the field of surveying has been drastically affected by use of aerial vehicles. Many tasks that used to take days now take hours with increase accuracy, so the effects of the UAV will be seen for many years to come.
Digital Coast Act
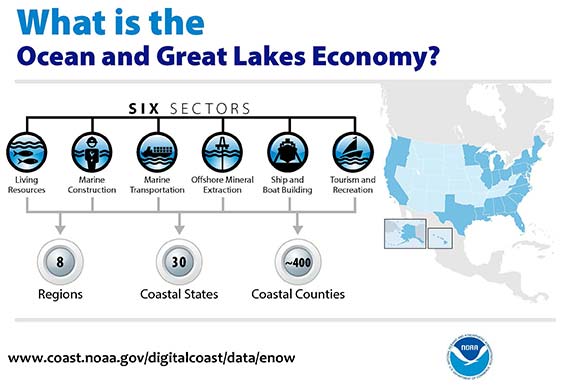 One of the legislative acts that NSPS was a big part of in 2017 was Senate Bill 110, “The Digital Coast Act” which led to the introduction of the companion bill in the House as H.R. 4062. This Act will allow NOAA to perform the necessary actions to actively and effectively monitor all coasts (including the Great Lakes) by various means, including bathymetric and conventional survey methods. This will require services to be performed by public and private surveyors primarily with GNSS capability to provide NOAA with standardized information based upon established datum.
One of the legislative acts that NSPS was a big part of in 2017 was Senate Bill 110, “The Digital Coast Act” which led to the introduction of the companion bill in the House as H.R. 4062. This Act will allow NOAA to perform the necessary actions to actively and effectively monitor all coasts (including the Great Lakes) by various means, including bathymetric and conventional survey methods. This will require services to be performed by public and private surveyors primarily with GNSS capability to provide NOAA with standardized information based upon established datum.
FLAIR Act
The Federal Land Asset Inventory Reform (FLAIR) Act of 2017 was introduced as House Resolution 2199 to help with creating a database of government property nationwide. The Government Accountability Office (GAO) has stated that the management of federal real property has become a “high-risk” item on its list of duties. Management of the number and value of properties has increased to a point that an overall dollar amount of federal buildings and land cannot be accurately determined.
How does the surveyor fit in with this issue? Simple. The U.S. government will need to upgrade its database of existing facilities through having them surveyed for asset management. Part of the requirements for providing these surveys will be completing the work in datums that will be following the geographical databases being designed to contain the parcel and building information. All this data will have geospatial information regarding parcel, address, utilities and functionality of the inventory, so providing the data with the sufficient attributes will become a key role for the surveyor. GNSS data collection will be at the heart of this monumental task.
Geospatial Data Act
As introduced in May 2017, the Geospatial Data Act (GDA) of 2017 is intended to jumpstart the nationwide initiative to develop and coordinate efforts to collect and maintain new datasets of elevation and infrastructure information. It is intended to improve and enhance federal geospatial activities to encourage state and local agencies to participate at the local level.
It is interesting to note, however, that the revised Geospatial Data Act was introduced by the same sponsors that did not include procurement procedures that follow the typical Brooks Act of quality-based selection, and instead relied on bid-based selection commonly found with suppliers. Both bills are being vetted by their sponsors and potential geospatial providers for clarity with ongoing debate going forward.
Hydrographic Services Improvement Act
H.R. 211 bring us the Hydrographic Services Improvement Act to provide NOAA with incentive and funding to standardize surveys desperately needed in waterway areas. Ongoing discussion continues this spring to determine sources of funding and priority of projects.
Infrastructure bill
February brought us the introduction of a significant infrastructure program aimed at improving roads, airports and bridges, with other major improvements across the country. This program is noteworthy in recognizing the need of current geospatial data and inventory of major infrastructure needs. The program sets forth the need for surveying, mapping and geospatial data for planning, design, construction, operations and maintenance for a multitude of projects nationwide. Much more will be discussed regarding the funding and priority of projects as the political year moves on.
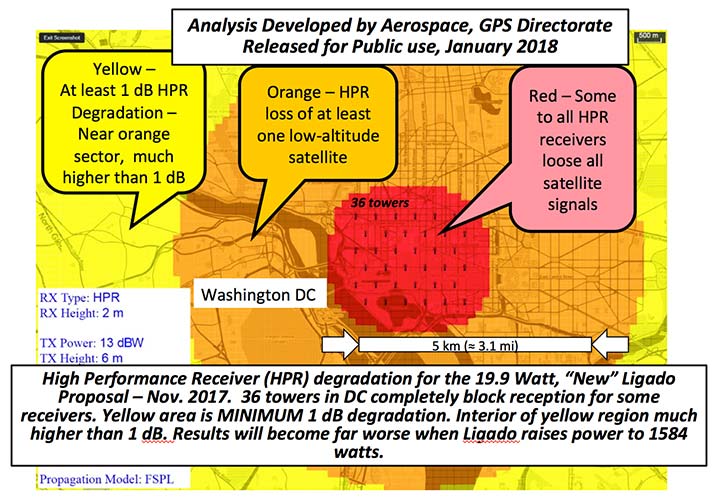
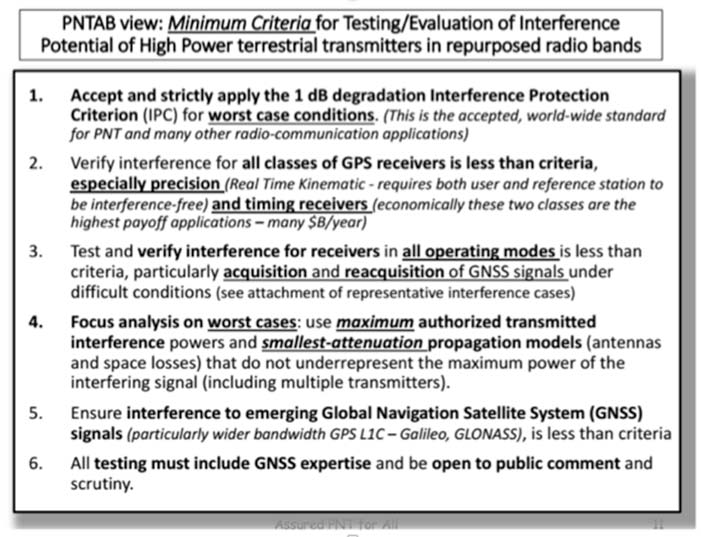
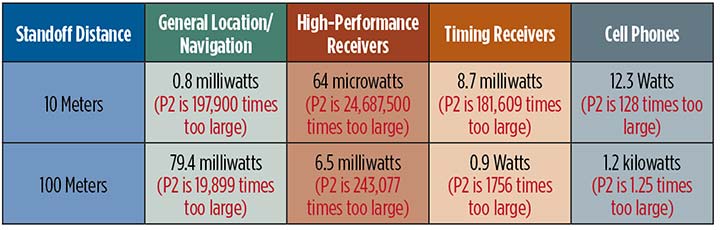
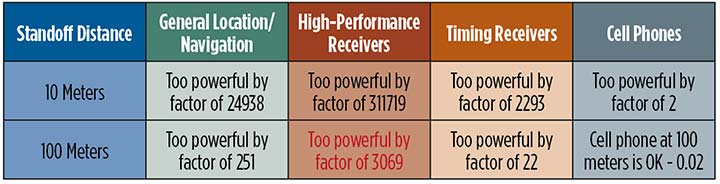
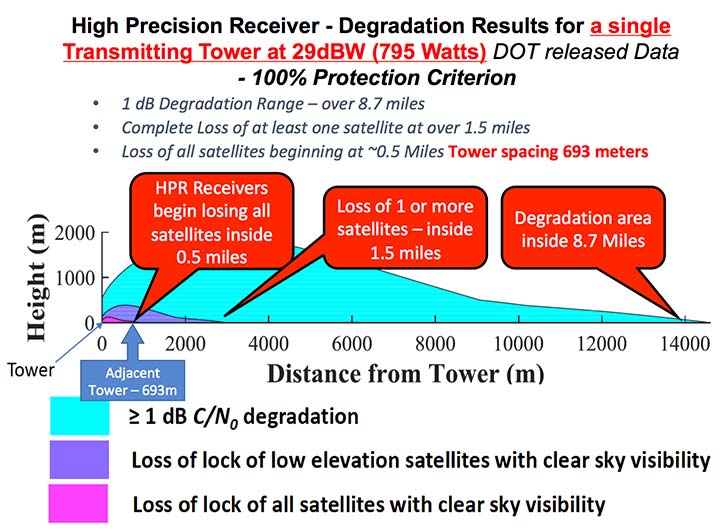
LightSquared/Ligado
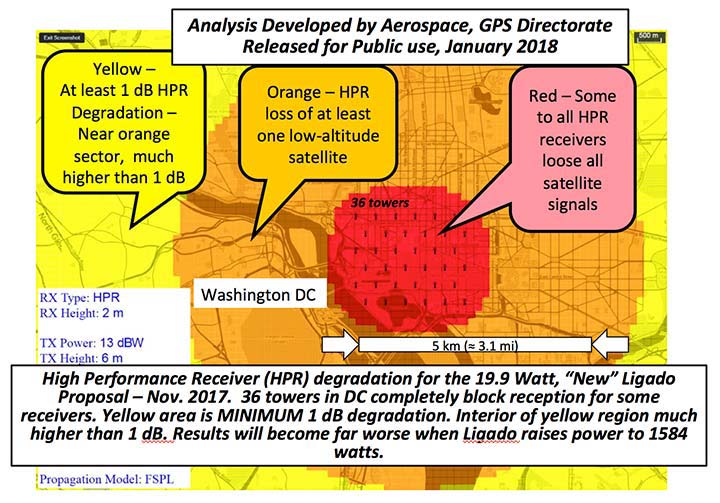 Readers may remember when the original confrontation with LightSquared began in 2011, and the subsequent battle over the frequency ranges adjacent to the GPS bandwidth. The FCC gave LightSquared initial but conditional approval to move forward with terrestrial-based transmission for 4G cellular transmission for up to 40,000 land-based stations. Testing by private and governmental agencies through 2011 and 2012 proved that LightSquared would greatly harm GPS activity for both public and private use. Once exposed, the conditional FCC approval was rescinded and LightSquared retreated into the shadows…until now.
Readers may remember when the original confrontation with LightSquared began in 2011, and the subsequent battle over the frequency ranges adjacent to the GPS bandwidth. The FCC gave LightSquared initial but conditional approval to move forward with terrestrial-based transmission for 4G cellular transmission for up to 40,000 land-based stations. Testing by private and governmental agencies through 2011 and 2012 proved that LightSquared would greatly harm GPS activity for both public and private use. Once exposed, the conditional FCC approval was rescinded and LightSquared retreated into the shadows…until now.
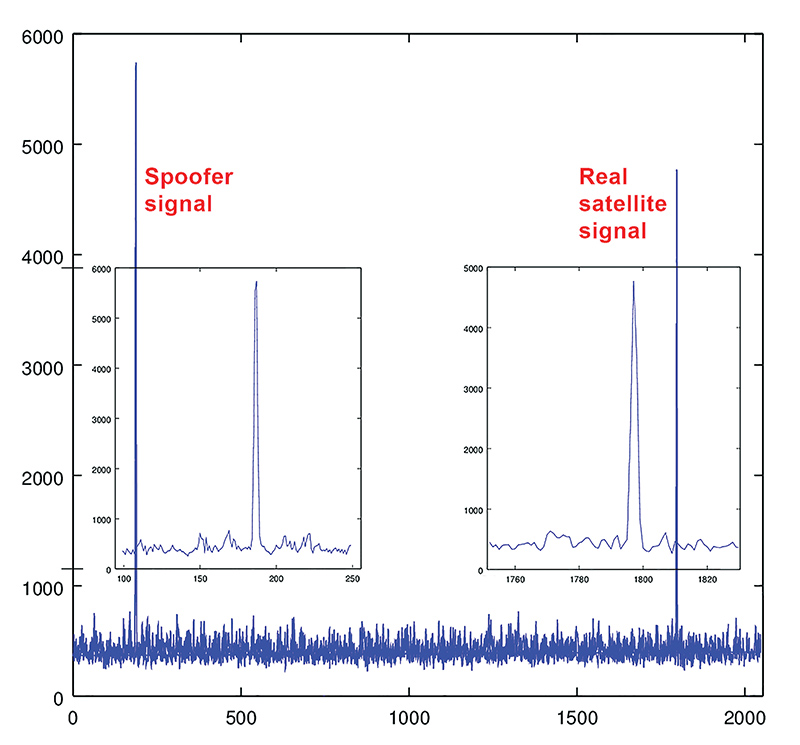
Reformed as Ligado, it has fresh investors and is making a charge into 5G technology with a revised game plan. While it is also looking to use other spectrums for communication, it once again is dangerously close to other current uses. Couple the proximity of adjacent bandwidth with the intense land-based signal versus a very weak satellite signal, there will be significant overriding by the new user. All of this is still being worked out through the FCC and the Department of Defense, so final resolution is yet to be seen.
IMAGES Act
The National Flood Insurance Program (NFIP), as part of FEMA, is looking to move forward with legislation introduced as Improvement of Mapping, Addresses, Geography, Elevations and Structures (IMAGES) Act (H.R 4905). This act intends to reform the NFIP program by utilizing new elevation data collected through the 3DEP program, which will be combined with other parcel attributes including addresses and structure types. This data will then be combined with refined floodway information to identify parcels that are more susceptible to damage caused by storms and flooding.
New legislation can be a good thing, but only if funding can be provided. This bill could provide a major upgrade to the flood mapping and insurance program, but it will hit a big snag with lack of monetary support. The proposed funding for FY2019 is $100 million, yet the project costs for the FY2018 budget is $178 million. This significant difference will make a large impact on the effectiveness of the program and proposed revamp.
Railroad reauthorization
NSPS has spent several years working with various legislators trying to find the right bill to insert language to require railroads to monument their routes before removing tracks. But with the recent accidents of various rail lines, the spotlight has been put on various factors that cause the incidents and how to eliminate their occurrence.
Positive train control (PTC) systems incorporate geospatial data collected through GNSS, lidar and conventional surveying means to work with operational systems to assess dangerous situations. Surveyors will need to be at the forefront of the necessary data collection so our efforts to continue lobbying for railroad funding will continue.
Net Neutrality Act
A political hot topic the surveyor doesn’t typically think about is net neutrality. Most people think they will be affected by lack of neutrality slowing down their home internet or streaming service, but for surveyors it will be a much bigger deal.
A remarkable number of surveyors and mappers use cellular data streaming to provide a connection to a positional correction service. The throttling of this data will effectively slow down the performance and quality of the positional data, leading to less reliability and productivity. It will also slow down the data interaction of office and field staff exchanging data and image files critical to project productivity and success.
So, when the call goes out to contact your federal representative to protect net neutrality, remember how it will affect your surveying business model and make that call.
How professional land surveying associations get it done
Many thanks to the countless hours put in by the NSPS Joint Government Affairs team, consisting of Committee Chair Pat Smith, NSPS Government Consultant John Palatiello, NSPS Federal Lobbyist John “JB” Byrd and NSPS Executive Director Curt Sumner. This group is constantly monitoring legislative action across the country as well as in D.C. and is quick to respond when action is needed on legislative issues. They do a tremendous job, yet not many see them in action. Hopefully all surveyors will continue to see and feel the benefits of their results.
As simple as the process is, the political world has gotten much more complicated as time marches on. From local municipal offices to Washington, D.C., getting things done through legislation has become a long process that takes patience and plenty of money to get your voice heard. Surveyors are no different than any other profession in that we must stay out in front of issues that affect our physical and business world. The important part is to stay informed and have a voice.
Let’s also remember those three fine individuals, memorialized on Mount Rushmore, who accomplished great things after their stints as surveyors, so anything is possible if we keep our voice in government.
Surveying has evolved into a highly technical professional with GNSS as a backbone method of data collection. With the U.S. government at the center of that technology, we need to make sure we, as the surveying practitioner, stays engaged.
Featured photo: National Park Service